Impact of Fairness and Heterogeneity on Delays in...
13
Impact of Fairness and Heterogeneity on Delays in Large-scale Content Delivery Networks Virag Shah The University of Texas at Austin Texas, USA [email protected] Gustavo de Veciana The University of Texas at Austin Texas, USA [email protected] ABSTRACT We consider multi-class queueing systems where the per class service rates depend on the network state, fairness cri- terion, and is constrained to be in a symmetric polymatroid capacity region. We develop new comparison results lead- ing to explicit bounds on the mean service time under var- ious fairness criteria and possibly heterogeneous loads. We then study large-scale systems with growing numbers of ser- vice classes n (e.g., files), heterogenous servers m and poly- matroid capacity resulting from a random bipartite graph modeling service availability (e.g., placement of files across servers). This models, for example, a large scale content delivery network (CDN) supporting parallel servicing of a download request. For an appropriate asymptotic regime, we show that the system’s capacity region is uniformly close to a symmetric polymatroid – i.e., heterogeneity in servers’ capacity and file placement disappears. Combining our comparison results and the asymptotic ‘symmetry’ in large systems, we study performance robust- ness to heterogeneity in per class loads and fairness criteria. Roughly, if each class can be served by cn = ω(log n) servers, the load per class does not exceed θn = o min( n log n ,cn) , and average server utilization is bounded by γ< 1, then mean delay satisfies the following bound: E[D (n) ] ≤ K θn cn 1 γ log 1 1 − γ , where K is a constant. Thus, large, randomly configured CDNs with a logarithmic number of file copies are robust to substantial load and server heterogeneities for a class of fairness criteria. Categories and Subject Descriptors C.4 [Computer Systems Organization]: Performance of Systems—Modeling techniques ; G.2 [Probability and Statistics]: Queueing theory; H.2.4 [Information Sys- tems]: Systems—Concurrency Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full cita- tion on the first page. Copyrights for components of this work owned by others than ACM must be honored. Abstracting with credit is permitted. To copy otherwise, or re- publish, to post on servers or to redistribute to lists, requires prior specific permission and/or a fee. Request permissions from [email protected]. SIGMETRICS’15, June 15–19, 2015, Portland, OR, USA. Copyright c 2015 ACM 978-1-4503-3486-0/15/06 ...$15.00. http://dx.doi.org/10.1145/2745844.2745857. General Terms Performance, Theory Keywords Delays; queuing system; content delivery networks; content placement; parallel downloads; bipartite graphs; robustness; fairness; asymptotics 1. INTRODUCTION In many shared network systems service rate is allocated to ongoing jobs based on a fairness criterion, e.g., α-fair (αF) (including max-min and proportional fair) as well as Balanced fair (BF), and other Greedy criteria [24]. When the network loads are stochastic a key open question is how the choice of fairness and network design will impact user perceived performance, e.g., job delays, as well as the sensi- tivity of performance to heterogeneity in network resources and traffic loads. Motivated by this challenge in this pa- per we take a step towards understanding these issues by investigating performance bounds for an interesting class of stochastic networks with symmetric polymatroid capacity under various fairness criteria. The second question driving this paper is whether large scale systems can be designed to be inherently robust to heterogeneity and at what cost? Specifically we consider a centralized content delivery infrastructure where a collec- tion of servers store and deliver large files, e.g., scientific datasets/visualization, 3D videos, software updates, other immersive technologies, and are aimed at doing so with small delays. Such centralized infrastructure could, for exam- ple, be part of a larger distributed content delivery network (CDN), where requests not currently available at distributed sites are forwarded to the centralized infrastructure which in turn delivers the files to the remote sites and/or users. There has been substantial recent interest in understand- ing basic design questions for these systems including, see e.g. [10, 14, 20, 23] and references therein: How should the number of file copies scale with the demand? What kinds of hierarchical caching policies are most suitable? How to best optimize storage/backhaul costs for unpredictable time- varying demands? Our focus is on CDNs that permit paral- lel file downloads from multiple servers – akin to peer-to-peer systems. In principle, with an appropriate degree of storage redundancy, one can achieve much better peak service rates, exploit diversity in service paths, produce robustness to fail- ures, and provide better sharing of pooled server resources.
Transcript of Impact of Fairness and Heterogeneity on Delays in...

Impact of Fairness and Heterogeneity on Delays in
Large-scale Content Delivery Networks
Virag ShahThe University of Texas at Austin
Texas, [email protected]
Gustavo de VecianaThe University of Texas at Austin
Texas, [email protected]
ABSTRACTWe consider multi-class queueing systems where the perclass service rates depend on the network state, fairness cri-terion, and is constrained to be in a symmetric polymatroidcapacity region. We develop new comparison results lead-ing to explicit bounds on the mean service time under var-ious fairness criteria and possibly heterogeneous loads. Wethen study large-scale systems with growing numbers of ser-vice classes n (e.g., files), heterogenous servers m and poly-matroid capacity resulting from a random bipartite graphmodeling service availability (e.g., placement of files acrossservers). This models, for example, a large scale contentdelivery network (CDN) supporting parallel servicing of adownload request. For an appropriate asymptotic regime,we show that the system’s capacity region is uniformly closeto a symmetric polymatroid – i.e., heterogeneity in servers’capacity and file placement disappears.
Combining our comparison results and the asymptotic‘symmetry’ in large systems, we study performance robust-ness to heterogeneity in per class loads and fairness criteria.Roughly, if each class can be served by cn = ω(log n) servers,
the load per class does not exceed θn = omin( n
logn, cn)
,
and average server utilization is bounded by γ < 1, thenmean delay satisfies the following bound:
E[D(n)] ≤ Kθncn
1γlog
1
1− γ
,
where K is a constant. Thus, large, randomly configuredCDNs with a logarithmic number of file copies are robustto substantial load and server heterogeneities for a class offairness criteria.
Categories and Subject DescriptorsC.4 [Computer Systems Organization]: Performanceof Systems—Modeling techniques; G.2 [Probability and
Statistics]: Queueing theory; H.2.4 [Information Sys-
tems]: Systems—Concurrency
Permission to make digital or hard copies of all or part of this work for personal or
classroom use is granted without fee provided that copies are not made or distributed
for profit or commercial advantage and that copies bear this notice and the full cita-
tion on the first page. Copyrights for components of this work owned by others than
ACM must be honored. Abstracting with credit is permitted. To copy otherwise, or re-
publish, to post on servers or to redistribute to lists, requires prior specific permission
and/or a fee. Request permissions from [email protected].
SIGMETRICS’15, June 15–19, 2015, Portland, OR, USA.
Copyright c 2015 ACM 978-1-4503-3486-0/15/06 ...$15.00.
http://dx.doi.org/10.1145/2745844.2745857.
General TermsPerformance, Theory
KeywordsDelays; queuing system; content delivery networks; contentplacement; parallel downloads; bipartite graphs; robustness;fairness; asymptotics
1. INTRODUCTIONIn many shared network systems service rate is allocated
to ongoing jobs based on a fairness criterion, e.g., α-fair(αF) (including max-min and proportional fair) as well asBalanced fair (BF), and other Greedy criteria [24]. Whenthe network loads are stochastic a key open question is howthe choice of fairness and network design will impact userperceived performance, e.g., job delays, as well as the sensi-tivity of performance to heterogeneity in network resourcesand traffic loads. Motivated by this challenge in this pa-per we take a step towards understanding these issues byinvestigating performance bounds for an interesting class ofstochastic networks with symmetric polymatroid capacityunder various fairness criteria.
The second question driving this paper is whether largescale systems can be designed to be inherently robust toheterogeneity and at what cost? Specifically we considera centralized content delivery infrastructure where a collec-tion of servers store and deliver large files, e.g., scientificdatasets/visualization, 3D videos, software updates, otherimmersive technologies, and are aimed at doing so with smalldelays. Such centralized infrastructure could, for exam-ple, be part of a larger distributed content delivery network(CDN), where requests not currently available at distributedsites are forwarded to the centralized infrastructure whichin turn delivers the files to the remote sites and/or users.There has been substantial recent interest in understand-ing basic design questions for these systems including, seee.g. [10, 14, 20, 23] and references therein: How should thenumber of file copies scale with the demand? What kindsof hierarchical caching policies are most suitable? How tobest optimize storage/backhaul costs for unpredictable time-varying demands? Our focus is on CDNs that permit paral-lel file downloads from multiple servers – akin to peer-to-peersystems. In principle, with an appropriate degree of storageredundancy, one can achieve much better peak service rates,exploit diversity in service paths, produce robustness to fail-ures, and provide better sharing of pooled server resources.

Intuitively when such systems have sufficient redundancythey will exhibit performance which is robust to limited het-erogeneity in demands and server capacity, as well as to thefairness criterion driving resource allocation. Such systemsmight also circumvent the need for, and overheads (suchas backhaul, state update, etc) associated with, dynamiccaching. If this is the case, CDNs enabling parallel servicingof individual download requests could be more scalable androbust to serving popular content.
Our Contributions and Organization: The contribu-tions of this paper are threefold, each of independent in-terest, and collectively, providing a significant step forwardover what is known in the current literature.
a.) Performance bounds: In Sections 3-4 we consider a classof systems with symmetric polymatroid capacity for whichwe develop several rate allocation monotonicity proper-ties which translate to performance comparisons amongstfairness policies, and eventually give explicit bounds onmean delays. Specifically we show that under homo-geneous loads the mean delay achieved by Greedy andαF rate allocations are bounded by that of BF alloca-tion which is computable. We then extend this upperbound to the case when the load is heterogeneous but‘majorized by a symmetric load’.
b.) Uniform symmetry in large systems: In Section 5 we con-sider a bipartite graph where nodes represent n job classes(files) and m servers with potentially heterogenous ser-vice capacity. The graph edges capture the ability ofservers to serve the jobs in the given classes. If jobs canbe concurrently served by multiple servers then the sys-tem’s service capacity region is a polymatroid. We showthat for appropriately scaled large system where the edgeset is chosen at random (random file placement) the ca-pacity region is uniformly close to a symmetric polyma-troid.
c.) Performance robustness in large systems: By combiningthese two results, in Section 6 we provide a simple per-formance bound for large-scale content delivery systems.The bound exhibits performance robustness in such sys-tems with respect to variations in total system load,heterogeneity in load across the classes, heterogeneityin server capacities, for α-fair based resource allocation.Specifically it establishes a clear link between the degreeof content replication and permissible demand hetero-geneity while ensuring performance scalability.
We have endeavored to provide as complete results as pos-sible, and have deferred details to the appendix. Section 7concludes the paper.
Related work: There is a substantial amount of relatedwork. Yet the link between fairness in resource allocationand job delays in stochastic networks is poorly understood.The only fairness criterion for which explicit expressions orbounds are known is the Balanced Fair rate allocation [3]which generalizes the notion of ‘insensitivity’ of the pro-cessor sharing discipline in M/G/1 queuing system. Underbalanced fairness, an explicit expression for mean delay wasobtained in [5, 6] for a class of wireline networks, namely,those with line and tree topologies. Also, a performancebound for arbitrary polytope capacity region and arbitraryload was provided in [1]. Similarly [11] developed bounds for
stochastic networks where flows can be split over multiplepaths. These bounds and expressions are either too specificor too loose. In [22] we developed an expression for the meandelay for systems with polymatroid capacity and arbitraryloads under Balanced Fair rate allocations. Unfortunatelythe result has exponential computational complexity in gen-eral. However the symmetric case has low complexity, a factwe use in the sequel.
Balanced fair rate allocation is defined recursively and isdifficult to implement. α-fair rate allocations [13, 19] whichare based on maximizing a concave sum utility function overthe system’s capacity region – this includes proportional andmax-min fair allocations, are more amenable to implementa-tion [12,15]. However, the only known explicit performanceresults for stochastic networks under such fairness criteriaare for systems where proportional fair is equivalent to bal-anced fair [3,17]. In [2], performance relationship under bal-anced and proportional fairness for several systems wherethey are not equivalent was studied through numerical com-putations, and were found to be relatively close in severalscenarios.
In this paper we focus on a class of stochastic networksthat can be characterized by a polymatroid capacity region.Such systems have also been considered in [22, 24]. For ex-ample, the work in [24] shows that when such systems aresymmetric with respect to load and capacity, a greedy rateallocation is delay optimal. However, the result is brittle toasymmetries. We provide more details on greedy and otherrate allocations in Section 3.
In summary when it comes to fairness criteria and stochas-tic network performance there is a gap between what is im-plementable and what is analyzable. One of the goals of thispaper is to provide comparison results which address thisgap, with particular focus on addressing user-performance inlarge-scale CDN systems prevalent today. In this setting thetwo works closest to this paper are [23] and [22]. Both adopta natural model for a CDN-like system based on a bipartitegraph which captures the availability of files at servers tosupport the file-download requests. They show that if thegraph is chosen at random and scaled appropriately thenuser performance is robust to load heterogeneity. The au-thors in [23] consider a service model where each requestcan be served by a single server without preemption – recallwe consider systems allowing parallel downloads. The flexi-bility of our service model leads to a significantly improvedmean delay bound and the resulting robustness. For exam-ple, upon availability of cn servers for each class, the max-
imum per-class load allowed in [23] is o
cnlogn
which is
significantly lower than our limit of omin( n
logn, cn)
. Also
in our work we are able to address the role of fairness criteriaand robustness to heterogeneity in server capacities.
While our service model is similar to that in [22], our workin this paper is different in several respects. Firstly, in [22]we focused on mean delays only for Balanced fair resourceallocation whereas in this paper we directly study the im-pact of fairness criteria on users’ delays. Secondly, we con-sider here a different scaling regime where the number of jobclasses (files) n grows proportionally to the number of serversm. In our earlier work the system was by design symmetricwhereas in this paper we establish the asymptotic symmetry.Thirdly, in this paper we establish new results on robustness

to limited heterogeneity in file demands, server capacity andα-fairness criteria by providing a uniform bound on delays.
2. SYSTEM MODELOur system consists of a set F of n classes. Jobs for class
i ∈ F arrive as an independent Poisson process of rate λi.Let λ = (λi : i ∈ F ). Service requirements of jobs arei.i.d exponential with mean ν. Let ρ = (ρi : i ∈ F ), whereρi = λiν denotes the load associated with class i.
Let qi(t) denote the set of ongoing jobs of class i at time t,i.e., jobs which have arrived but have not completed service,and q(t) = (qi(t) : i ∈ F ). Let x(t) = (xi(t) : i ∈ F ), wherexi(t) |qi(t)|, i.e., x(t) captures the number of ongoing jobsin each class.
We refer to x(t) as the state of the system at time t. LetX(t) correspond to the random vector describing the stateof the system at time t. We refer to the random process(X(t) : t ≥ 0) as the state process. For any x(t), let Ax(t)
denote the set of active classes, i.e., the classes with at leastone ongoing job.
Service Model: For any v ∈ qi(t), let bv(t) be the rate atwhich job v is served at time t. The vector b(t) = (bv(t) :v ∈ ∪iqi(t)) represents the rates assigned to ongoing jobsat time t. Within each class we assume that each job isallocated equal rate, i.e., bv(t) = bu(t) for each u, v ∈ qi(t).If job v arrives at time tav and has service requirement ηv,
then it departs at time tdv such that ηv =
tdv
tavbv(t)dt. Thus,
tdv − tav is the delay for job v.Further, let ri(x
) be the total rate at which class i jobsare served at time t when x(t) = x
, i.e., at any time t,ri(x(t)) =
v∈qi(t)
bv(t). Let r(x) = (ri(x) : i ∈ F ). We
call the vector function r(.) the rate allocation. Note thatthe rate allocation at any time t depends only on the x(t)and thus can not depend on the residual file sizes of ongoingjobs.
Polymatroid Capacity Region: We shall consider systemswhere rate allocation r(x) for each x are constrained to bewithin a polymatroid capacity region C.
Definition 1. We say that C is a polymatroid if ittakes the following form:
C =
r ≥ 0 :
i∈A
ri ≤ µ(A), ∀A ⊂ F
,
where µ(.) is a set function which satisfies the following prop-erties:1) Normalized: µ(∅) = 0.2) Monotonic: if A ⊂ B, µ(A) ≤ µ(B).3) Submodular: for all A,B ⊂ F ,
µ(A) + µ(B) ≥ µ(A ∪B) + µ(A ∩B).
The function µ(.) is called a rank function.
Polymatroids and submodular functions are well studied inliterature, see e.g., [9, 21].
Definition 2. A polymatroid C is a symmetric poly-
matroid if its rank function µ(.) satisfies the following prop-erty: for each A ⊂ F , we have µ(A) = h(|A|), where h :Z+ → R+ is a non-decreasing concave function.
For a given x, we say r(x) is feasible if r(x) ∈ C; whenthis is true for all x, we say that the rate allocation r(.) is
feasible. We call C the capacity region of the system. Sym-metric polymatroid capacity regions appear in several sys-tems, for example, Gaussian symmetric multi-access chan-nels [24]. Further, we will see in Section 5 that certain typesof large content delivery networks have approximately sym-metric polymatroid capacity regions.
Polymatroid capacity regions C have a special propertythat for any r ∈ C, there exists r
≥ r such that r ∈ D
r ∈ C :
i∈Fri = µ(F ) [9, 21]. Also, as evident from the
definition, for any A ⊂ F the set r ∈ C : ri = 0, ∀i /∈ Ais also a polymatroid, with a rank function which is therestriction of µ(.) to subsets of A.
Further, we let
C ρ ≥ 0 :
i∈A
ρi < µ(A), ∀A ⊂ F
, (1)
and will see, C is the set of loads which are stabilizable forappropriate rate allocation policies.
Notation for ordering and majorization: In the sequel, wewill rely on notation for ordering and majorization which weintroduce below.
Let I be a finite arbitrary index set. Consider an arbitraryvector z = (zi : i ∈ I). We let z[1] ≥ z[2] ≥ . . . , z[|I|]denote the components of z in decreasing order. We let |z|denote
i∈I
|zi|. We let ei denote a vector with 1 at the ith
coordinate and 0 elsewhere.For vectors z and z
such that zi ≤ zi for each i ∈ I, wewrite z ≤ z
and say that z is dominated by z.
Below we define majorization (≺) which describes how‘balanced’ a vector is as compared to another vector. Inwords, by z ≺ z
we mean that z is ‘more balanced’ than z
but they have the same sum. By z ≺w z we mean that z
is ‘more balanced’ and has lower sum than z. Similarly, by
z ≺wz we mean that z is ‘more balanced’ and has larger
sum than z.
Definition 3. For vectors z and z such that |z| = |z|
and
k
l=1 z[l] ≤
k
l=1 z[l] for each k ∈ 1, 2, . . . , |I|, we say
z is majorized by z, and denote this as z ≺ z
.If we have
k
l=1 z[l] ≤
k
l=1 z[l] for each k ∈ 1, 2, . . . , |I|,
we say z is weak-majorized from below by z, and denote this
as z ≺w z.
Similarly, if we have
k
l=0 z[|I|−l] ≥
k
l=1 z[|I|−l] for each
k ∈ 0, 1, . . . , |I|−1, we say z is weak-majorized from aboveby z
, and denote this as z ≺wz.
The dominance and majorization have an associated stochas-tic version, defined below.
Definition 4. Consider random vectors Z and Z. If
there exist random vectors Z and Z such that Z and Z are
identically distributed, Z and Z are identically distributed,
and Z ≤ Z
almost surely, then we say that Z is stochasti-cally dominated by Z
, and denote this as Z ≤stZ
.Instead, if Z
≺w Z, then we say that Z stochastically
weak-majorized from below by Z, and denote this as Z ≺st
w
Z.
In the sequel, it will be useful to introduce following no-tation. Recall, r(x) = (ri(x) : i ∈ F ) is the vector ofrates allocated to various classes. We define r(k)(.) for eachk ∈ 1, . . . , n as follows: For a given state x, let ik bethe class corresponding to x[k]. Then, r(k)(x) = rik (x). In

words, r(k)(x) is the rate allocated to the class with the kth
largest number of ongoing jobs.Notation for scaling: Consider sequences of numbers (fn :
n ∈ N) and (gn : n ∈ N). We say that fn = O(gn) if thereexists a constant k > 0 and an integer n0 such that for eachn ≥ n0, we have fn ≤ kgn. We say that fn = Ω(gn) if thereexists a constant k > 0 and an integer n0 such that for eachn ≥ n0, we have fn ≥ kgn.We say that fn = o(gn) if limn→∞
fngn
= 0. Similarly, we
say that fn = ω(gn) if limn→∞gnfn
= 0.Several notations above are borrowed from [16], [24] and
[22].
3. RATE ALLOCATION POLICIES:A BACKGROUND
There are several possible rate allocation policies, each re-sulting in potentially different user-perceived delays. Below,we introduce three different policies studied in literature,each with its own merits.
1) Greedy rate allocation: Roughly, the Greedy rateallocation policy on a polymatroid capacity region C assignsthe maximum possible rate to the largest queues subject tothe capacity constraints. We denote the Greedy rate alloca-tion by r
G(.) and define it as follows: for each state x, welet
rG(k)(x) = µ ([1], [2], . . . , [k])− µ ([1], [2], . . . , [k − 1])
if k ∈ 1, 2, . . . , |Ax|,= 0 otherwise.
Equivalently, the sum rate assigned to the k largest queues,namely
k
l=1 rG
(l)(x), is equal to µ ([1], [2], . . . , [k]). Usinga quadratic Lyapunov function, one can show that Greedyrate allocation results in a stationary state process if ρ ∈ C,where C is defined in (1). The Greedy rate allocation forsymmetric polymatroid capacity regions was first studiedin [24] where the following result was shown.
Proposition 1. ([24]) Suppose the capacity region C is asymmetric polymatroid and the load ρ ∈ C is homogeneous,i.e., ρi = ρ for each i ∈ F . Then the following statementshold:
1. Let (XG(t) : t ≥ 0) and (X(t) : t ≥ 0) be state pro-cesses under Greedy and an arbitrary feasible rate allo-cation, respectively. If XG(0) ≺st
w X(0) then XG(t) ≺st
w
X(t) for each t ≥ 0.
2. The mean job delay under Greedy rate allocation is lessthan or equal to that under any feasible rate allocation.
Unfortunately, this optimality result for symmetric systemsdoes not provide any explicit performance characterizationor bound. Further, the result is brittle to heterogeneity inload or capacity.
2) α-fair rate allocation: As introduced in [19], thispolicy allocates rates based on maximizing a concave sumutility function subject to the system’s capacity region. For-mally, for a given α > 0, the α-fair (αF) rate allocation r
α(.),can be defined as follows: for each state x, let
rα(x) =
argmaxr∈C
i∈F
xαi r
1−αi
1−αfor α ∈ (0,∞)\1,
argmaxr∈C
i∈Fxi log(ri) for α = 1.
(2)
This generalizes various notions of fairness across jobs, e.g.,proportional fair and max-min fair allocations are equivalentto the α-fair policy for α = 1 and α → ∞, respectively [19].However, for polymatroid capacity regions the following re-sult has been established.
Proposition 2. ([22]) All α-fair rate allocations are equiv-alent for polymatroid capacity regions.
Further, the stability result in [7] implies that the αF rateallocation results in a stationary state process when ρ ∈C. The α-fair rate allocation is attractive in that it it isamenable to distributed implementation [12, 15] and satis-fies natural axioms for fairness [13]. Unfortunately, little isknown regarding their performance under stochastic loads.What has been shown is that for α-fair allocations, the per-formance is sensitive to the distribution of service require-ments [3]. Thus, it will be hard to make general claims. Thisleads us to the Balanced fair rate allocation below.
3) Balanced fair rate allocation: As introduced in [3],the Balanced fair (BF) rate allocation is ‘insensitive’, i.e.,performance depends on the job service distribution onlythrough its mean. Further, as we will see, it is more amenableto performance analysis under stochastic loads. Formally,Balanced fair rate allocation r
B(.) for a polymatroid capac-ity region C can be defined as follows, see [3]: for each statex, we have
rBi (x) =Φ(x− ei)
Φ(x), ∀i ∈ F (3)
where the function Φ is called a balance function and isdefined recursively as follows: Φ(0) = 1, and Φ(x) = 0∀x s.t. xi < 0 for some i, otherwise,
Φ(x) = maxA⊂F
i∈A
Φ(x− ei)
µ(A)
. (4)
As shown in [3], (3) ensures the property of insensitivity,while (4) ensures that r(x) for each x lies in the capacityregion, i.e., the constraints
i∈A
ri(x) ≤ µ(A) are satisfiedfor each A. It also ensures that there exists a set B ⊂ Ax
for which
i∈Bri(x) = µ(B). In fact the BF allocation is
the unique policy satisfying the above properties.It was shown in [2, 3] that if ρ ∈ C, the state process
(XB(t) : t ≥ 0) is asymptotically stationary. Further, underthis condition, its stationary distribution is given by
π(x) =Φ(x)G(ρ)
i∈Ax
ρxii
where G(ρ) =
x
Φ(x)
i∈Ax
ρxi
i.
The existence of such an expression for stationary distri-bution makes balanced fairness amenable for time-averagedperformance analysis, a property we will use extensively inthe sequel. While, in general, BF may result in wasteful re-source allocation, e.g., BF is not Pareto efficient for certaintriangle networks studied in [3], for polymatroid capacity re-gions BF has been shown to be Pareto efficient which leadsus to following two results.
Proposition 3. ([22]) For polymatroid capacity regionsC, BF rate allocation is Pareto efficient, i.e.,
i∈Ax
rBi (x) =µ(Ax) for each x.
In [22], the following easily computable exact expression formean delay was provided for homogeneous loads.

Proposition 4. ([22]) Consider a system with symmet-ric polymatroid capacity region C and with homogenous loadρ ∈ C, i.e., for all j ∈ F we have ρj = ρ. Then, the meandelay under balanced fair resource allocation to serve the jobsis given by,
E[DB
ρ ] =νF (ρ)F (ρ)
, (5)
where, F (ρ) and F (ρ) can be recursively obtained as follows:
F (ρ) =n
k=0
Fk(ρ), (6)
where, F0(ρ) = 1, and for k ≥ 1,
Fk(ρ) =(n− k + 1)ρFk−1(ρ)
h(k)− kρ. (7)
Also,
F (ρ) =n
k=0
knFk(ρ), (8)
where, F0(ρ) = 0, and for k ≥ 1,
Fk(ρ) =Fk(ρ) + n−k+1
kFk−1(ρ) +
(n−k+1)(k−1)k
ρFk−1(ρ)
h(k)− kρ.
(9)
An expression for mean delay for a system with an arbitrarypolymatroid capacity region and arbitrary load is also pro-vided in [22], but has exponential computation complexity.
4. PERFORMANCE BOUNDSRecall that for each rate allocation policy considered in
Section 3, namely Greedy, αF, and BF, the underlying stateprocess is asymptotically stationary if the load ρ ∈ C. Thusthe corresponding mean delays of the system’s jobs are fi-nite. In this section, we assume that the capacity region Cis symmetric, and develop explicit and easily computablebounds on the mean delay of jobs in systems with Greedyor αF rate allocation under potentially heterogeneous loadρ within a subset of the stability region C.
Our goal here is to enable performance analysis for a gen-eral enough class of systems so as to allow us to developquantitative and qualitative insights for large-scale systemsprevalent today. For example, the bounds developed be-low will enable us to later characterize user-performance indownloading files from heterogeneous (in loads and servicecapacities) large-scale content delivery systems supportingparallel servicing of downloads.
Below we develop performance bounds for the followingthree cases:
(i) Homogeneous loads: We provide an upper bound for
mean delay for loads ρ ∈ C which are homogeneousacross classes with non-zero entries, i.e., if A is the setof classes such that ρi > 0 for each i ∈ A, then ρi = ρjfor each i, j ∈ A.
(ii) Dominance bound: For loads ρ,ρ ∈ C such that ρ ≤ ρ
we show that the system with load ρ has lower meandelay than that with load ρ. Thus, if ρ is homogeneousacross non-zero entries as described above then we havean upper bound for mean delay for ρ as well, even if ρis heterogeneous.
(iii) Majorization bound: We consider loads ρ,ρ ∈ C suchthat ρ ≺ ρ. Further, suppose that ρ is homogeneousacross non-zero entries as described above. Then, weshow that the system with load ρ has lower mean delaythan that with load ρ.
Using the above majorization bound, we can bound meandelay for a larger subset of heterogeneous loads as com-pared to the dominance bound. For example, consider ρ =(ρ, 1
2ρ,12ρ). Recall, for symmetric rank functions we have
µ(A) = h(|A|) for each A ⊂ F , where h(.) is concave.Now, if 1
3h(3) < ρ < 12h(2), then ρ = (ρ, ρ, 0) is in C but
ρ = (ρ, ρ, ρ) is not. Then the majorization bound holds forρ but the dominance bound does not. Further, even if ρ isin C, the bound obtained through ρ may be tighter.
The bounds for each case will be obtained through cou-pling arguments on the corresponding state processes, fol-lowed by an application of Little’s law.
4.1 Homogeneous LoadsConsider the following set of loads:
BH ρ ∈ C : ∃A ⊂ F s.t. ρi = ρj ∀i, j ∈ A
and ρi = 0 ∀i ∈ F\A.
Since by Proposition 1 the Greedy rate allocation is delayoptimal for homogeneous loads, for each ρ ∈ BH one can im-mediately conclude that the performance of BF as obtainedin Proposition 4 is an upper bound for Greedy. Below weshow that this performance upper bound via BF also holdsfor αF rate allocation.
To that end we show a coupling result for systems underαF and BF rate allocations. In the process, we prove anduse the property that αF is more greedy than BF in thefollowing sense: if the state process corresponding to αF isthe same as or more balanced than that of BF, then αFassigns larger rate to bigger queues than BF. This in turnkeeps the state process for αF more balanced in the future.For a proof of the theorem below see the Appendix.
Theorem 1. Consider a system with symmetric polyma-troid capacity region and load ρ ∈ BH , i.e., ρ is homoge-neous across classes with non-zero entries. Then the follow-ing statements hold:
1. Let (Xα(t) : t ≥ 0) and (XB(t) : t ≥ 0) be state pro-cesses under αF and BF rate allocation. If Xα(0) ≺w
XB(0) then we have X
α(t) ≺st
w XB(t) for each t ≥ 0.
2. The mean delays for systems with αF and BF rateallocation for load ρ ∈ BH satisfy the following:
E[Dα
ρ ] ≤ E[DB
ρ ].
4.2 Dominance BoundsThe result below maintains that for αF and Greedy rate
allocations, if ρ ≤ ρ then the state process of a systemunder load ρ is stochastically dominated by that under ρ.The result can be shown using a per class coupling argument,along with the following per-class rate monotonicity whichis satisfied by both αF and Greedy: for each i = j we haveri(x) ≥ ri(x+ ej). We omit the proof for brevity.
Theorem 2. Consider a system with symmetric polyma-troid capacity region C. The rate allocation r(.) is either αFor Greedy. Let ρ ≤ ρ. Then the following statements hold:

1. Let (X(t) : t ≥ 0) and (X(t) : t ≥ 0) be state processesunder loads ρ and ρ. If X(0) ≤ X
(0), then we haveX(t) ≤st
X(t) for each t ≥ 0.
2. The mean delays for systems with loads ρ and ρ satisfythe following:
E[Dρ] ≤ E[Dρ ]
Theorem 2 along with Theorem 1 allows us to bound themean delay for any load in the following region:
BD ρ ∈ C : ∃ρ ∈ BH s.t. ρ ≤ ρ,
or equivalently,
BD ρ ∈ C : max
i
ρi <h(k)k
where k = |i : ρi > 0|.
Theorem 2 implies that for αF and Greedy rate allocations,the mean delay for each load ρ ∈ BD can be bounded bythat for a corresponding load ρ ∈ BH , which in turn has aneasily computable bound through Theorem 1. Thus, we getthe following corollary.
Corollary 1. Consider a system with symmetric polyma-troid capacity region and load ρ ∈ BD. Let ρ = maxi ρi. Letρ be such that for each i ∈ F we have ρi = ρ if ρi > 0 andρi = 0 if ρi = 0. Then, mean delays for systems with Greedyand αF rate allocations for load ρ satisfy the following:
E[DG
ρ ] ≤ E[DB
ρ ], and E[Dα
ρ ] ≤ E[DB
ρ ].
4.3 Majorization BoundsThe theorem below generalizes the Dominance bound to
provide a mean delay bound for a system with load ρ suchthat there exists ρ ∈ BH which satisfies ρ ≺ ρ.
Its proof is similar to that of Theorem 1, where instead ofrelative greediness between rate allocations, we use the fol-lowing balancing property satisfied by both αF and Greedy:if state x is more balanced than state x
, than the rate al-location r(.) would provide larger rates to longer queues instate x as compared to x, and thus balancing it even further.For a brief discussion of this property, see the Appendix. Weomit the proof for brevity.
Theorem 3. Consider a system with symmetric polyma-troid capacity region C. The rate allocation r(.) is either αFor Greedy. Let ρ,ρ ∈ C be such that ρ ≺ ρ and ρ ∈ BH ,i.e., ρ is homogeneous across classes with non-zero entries.Then the following statements hold:
1. Let (X(t) : t ≥ 0) and (X(t) : t ≥ 0) be state processesunder loads ρ and ρ. If X(0) ≺w X
(0), then we haveX(t) ≺st
w X(t) for each t ≥ 0.
2. The mean delays for systems with loads ρ and ρ satisfythe following:
E[Dρ] ≤ E[Dρ ]
Theorem 3 above is stronger than Theorem 2 in the sensethat it only requires the condition ρ ≺w ρ instead of ρ ≤ρ. However, it is weaker in the sense that it requires ρ
to be in BH and that it gives stochastic weak-majorizationof the corresponding state processes instead of stochasticdominance.
i1
i2
s1
s2
µs1
µs2
n Files m Servers
i3
in
s3
sm
µs3
µsm
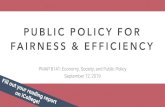
Figure 1: Graph G(n) = (F (n) ∪ S(n);E(n)) modeling
the placement of copies of n files across m = bnservers with finite service capacities in a CDN-like
infrastructure.
For both rG(.) and r
α(.), Theorem 3, along with Theo-rem 1 and Proposition 1, allows us to bound the mean delayfor any load in the following region:
BM ρ ∈ C : ∃ρ ∈ BH s.t. ρ ≺ ρ,
or equivalently,
BM ρ ∈ C : ∃k ≤ n s.t. max
i
ρi <h(k)k
and |ρ| < h(k)
.
Theorem 3 implies that for αF and Greedy rate allocation,the mean delay for each load ρ ∈ BM can be bounded bythat for a corresponding load ρ ∈ BH , which in turn has aneasily computable bound through Theorem 1. Thus, we getthe following corollary.
Corollary 2. Consider a system with symmetric polyma-troid capacity region and load ρ ∈ BM . Let ρ = maxi∈F ρi.Let k = minl : ρ ≤ h(l)
land |ρ| ≤ h(l). Let A be an arbi-
trary subset of F of size k and ρ be such that ρi = ρ ∀i ∈ Aand ρi = 0 otherwise. Then, the mean delays for systemswith Greedy and αF rate allocations for load ρ satisfy thefollowing:
E[DG
ρ ] ≤ E[DB
ρ ], and E[Dα
ρ ] ≤ E[DB
ρ ].
It is easy to check that for each ρ ∈ BM the computationof the mean delay upper bound as given by Corollary 2 hascomplexity O(n) when computed using Proposition 4.
5. UNIFORM SYMMETRY IN LARGE SYS-TEMS
Large content delivery infrastructure, where servers canjointly serve file-download requests, not only have polyma-troid capacity but under appropriate assumptions becomeapproximately symmetric.
Consider a sequence of bipartite graphs G(n) = (F (n) ∪S(n);E(n)) where F (n) is a set of n files, S(n) is a set ofm = bn servers for some constant b, and each edge e ∈E(n) connecting a file i ∈ F (n) and server s ∈ S(n) impliesthat a copy of file i is available at server s. For each nodes ∈ S(n), let N (n)
s denote the set of neighbors of server s, i.e.,the set of files it stores and can serve. Henceforth, whereverpossible, we will avoid the use of ceil and floor notations toavoid clutter.
We associate each file in F (n) with a class of job arrivalseach corresponding to a file download request. The arrival

processes and service requirements are as described in Sec-tion 2, with λ(n) and ρ(n) representing the correspondingarrival rates and loads. Further, we let the service capacityof each server s ∈ S(n) be µs bits per second.
We allow each server s ∈ S(n) to concurrently serve thejobs with classes N (n)
s as long as the total service rate doesnot exceed µs. The service rate for each job is the sum of therates it receives from different servers. For any A ⊂ F (n),let µ(n)(A) be the maximum sum rate at which jobs withfile-class in A could be served, i.e.,
µ(n)(A)
s∈S(n)
1A∩N
(n)s =∅
µs.
Clearly any rate allocation r(.) for such a system mustsatisfy the following constraints for each state x: ∀A ⊂ F (n),
i∈A
ri(x) ≤ µ(n)(A).
It was shown in [22] that µ(n)(.) is submodular and thatthe corresponding polymatroid
C(n) r ≥ 0 :
i∈A
ri ≤ µ(n)(A), ∀A ⊂ F (n)
is indeed the capacity region for such a system, i.e., eachr ∈ C(n) is achievable.
Note that C(n) will in general be an asymmetric polyma-troid depending upon edges E(n) and service capacities µs
for each s ∈ S(n). However, we show below that if copiesof files are stored across servers at random and scaled ap-propriately with n then, as n increases, C(n) gets uniformlyclose to a symmetric polymatroid, subject to the followingassumptions:
Assumption 1 (Heterogeneous server capacities).
S(n) is partitioned into a finite number of groups where eachgroup has Ω(n) number of servers. Within each group, theserver capacities are homogeneous. The server capacitiesacross groups may be heterogeneous such that average of ser-vice capacity across servers
ξ 1m
s∈S(n)
µs
is independent of n.
Assumption 2 (Randomized file placement). Let (cn :n ∈ N) be a sequence such that
cn = ω(log n).
For each file i ∈ F (n), store a copy in cn different serverschosen uniformly and independently at random.
A randomized placement of file copies implies a randomsystem configuration, i.e., a random graph. Let E(n) denotethe random set of edges resulting Assumption 2. Similarly,for each s ∈ S(n), let N (n)
s denote the random set of neigh-bors of s, i.e., the random set of files stored in server s.LetM (n)(.) denote the corresponding random rank function,and µ(n)(.) a possible realization. Then, for each A ⊂ F (n),we have
M (n)(A) =
s∈S(n)
1A∩N (n)
s =∅µs,
where 1A∩N (n)
s =∅ is now a Bernoulli random variable in-
dicating if a copy of at least one of the files in A is placedin s. In fact, for each A ⊂ F (n) such that |A| = k, the set1
A∩N (n)s =∅
: s ∈ S(n)
is a set of m negatively associ-
ated Bernoulli(p(n)k
) random variables [8] where p(n)k
is theprobability that a given server is assigned at least one of thekcn copies of files in A and is given by
p(n)k
1−1− 1
m
kcn
∀k = 0, 1, . . . , n.
By linearity of expectation, for each A ⊂ F (n), we have
µ(n)(A) E[M (n)(A)] = ξmp(n)|A| .
Note, µ(n)(A) depends on A only through |A| and is thussymmetric. The theorem below shows that with high prob-ability we can bound the random rank function M (n)(.) uni-formly over all A ⊂ F (n), from above as well as from below,with a symmetric rank function which is close to µ(n)(A).See Section 5.1 for a proof.
Theorem 4. Fix independent of n such that 0 < < 1.Consider a sequence of systems with n files and m = bnservers, where b > 0 is a constant. Under Assumptions 1and 2, let M (n)(.) be the corresponding random rank func-tion. Then, there exists a sequence (gn : n ∈ N) such thatgn = ω(log n), and
P∃A ⊂ F (n) s.t. M (n)(A) ≤ (1− )µ(n)(A)
≤ e−gn ,
and
P∃A ⊂ F (n) s.t. M (n)(A) ≥ (1 + )µ(n)(A)
≤ e−gn .
This result gives us following corollary on the randomcapacity region associated with M (n)(.) generated by ran-dom file placement. Recall, µ(n)(A) = E[M (n)(A)] for allA ⊂ F (n), and let
C(n) r ≥ 0 :
i∈A
ri ≤ µ(n)(A), ∀A ⊂ F (n)
.
Thus C(n) is the (symmetric) capacity region associated withthe average rank function µ(.). Then, the following holds:
Corollary 3. Fix independent of n such that 0 < <1. Under Assumptions 1 and 2, the random capacity regionassociated with randomized file placement is a subset of (1+)C(n) and a superset of (1− )C(n) with high probability.
Further, under Assumption 1, there exists a deterministicfile placement where cn = ω(log n) copies of each file arestored across servers such that the corresponding capacityregion C(n) is a subset of (1 + )C(n) and a superset of (1−)C(n).
5.1 Proof of Theorem 4Here, we will only show
P∃A ⊂ F (n) s.t. M (n)(A) ≤ (1− )µ(n)(A)
≤ e−gn ,
The other bound follows in similar fashion.For now, suppose µs = ξ for each s ∈ S(n). We relax this
assumption later.

We first provide a bound for PM (n)(A) ≤ (1− )µ(n)(A)
for each A ⊂ F (n). Then, for each k = 1, 2, . . . , n, we usethe union bound to obtain a uniform bound over all setsA ⊂ F (n) such that |A| = k. The bound we provide for
PM (n)(A) ≤ (1− )µ(n)(A)
is small enough so that the
above union bound is small too. Then, yet another use ofthe union bound would give us the uniform result over allsets A ⊂ F (n).
Now, if the random variables
1
A∩N (n)s =∅
: s ∈ S(n)
were independent Bernoulli(p(n)k
), then the following twoconcentration results would hold [18]: Fix k ∈ 1, . . . , n.For each set A ⊂ F (n) such that |A| = k, we have
PM (n)(A) ≤ (1− )µ(n)(A)
≤ e−
2
2 mp(n)k , (10)
and,
PM (n)(A) ≤ (1− )µ(n)(A)
≤ e
−mH
p(n)k (1−)||p(n)
k
,
(11)where H(p||q) is the KL divergence between Bernoulli(p)and Bernoulli(q) random variables, given by
H(p||q) = p log
pq
+ (1− p) log
1− p1− q
.
However, in reality, since
1
A∩N (n)s =∅
: s ∈ S(n)
are
negatively associated Bernoulli(p(n)k
) random variables, theabove Chernoff bounds still apply [8].
In the sequel, we will use the following two technical lem-mas. Their proofs are provided in the Appendix A.3.
Lemma 1. Let a sequence (gn : n ∈ N) be such thatgn = o(cn). Let δ1 be a positive constant independent of nsuch that δ1 < 1. Then, for large enough n, we have
p(n)k
≥ δ1gnn
k ∀k ∈0, 1, . . . ,
ngn
.
Lemma 2. There exists a positive constant δ such that
Hp(n)k
(1− )||p(n)k
≥ −δ + kcn
m.
Now, let (gn : n ∈ N) be a sequence such that gn (cn log n)1/2 for each n. The following properties of gn canbe easily checked:
gn = ω(log n) and gn = o(cn). (12)
We now provide a uniform bound over all sets A ⊂ F (n)
such that |A| = k for each k ∈ 1, . . . , n, under followingtwo cases.
Case 1 0 ≤ k ≤ n
gn: From Lemma 1, for each k we have
p(n)k
≥ δ1kgnn
,
for a suitably chosen positive constant δ1 independent of n.In the sequel, δi for any i ≥ 1 will be a suitably chosenpositive constant independent of n.
Using the concentration result (10), for |A| = k we get
PM (n)(A) ≤ (1− )µ(n)(A)
≤ e−
2
2 δ1bkgn ,
and using the union bound, we get
P∃A ⊂ F (n) s.t. |A| = k and M (n)(A) ≤ (1− )µ(n)(A)
≤ e−2
2 δ1bkgn
nk
≤ e−
2
2 δ1bkgn+k logn ≤ e−δ2kgn .
Case 2n
gn< k ≤ n: In this case, we use the concentration
result (11). From Lemma 2, we get
PM (n)(A) ≤ (1− )µ(n)(A)
≤ e(δ6m−kcn).
Since gn = o(cn), for n large enough we get δ6m ≤ (/2)ncngn
.
Also, for each k > n
gn, we have (/2)ncn
gn≤ (/2)kcn. Thus,
for large enough n, δ6m− kcn ≤ −(/2)kcn for each k suchthat n
gn< k ≤ n, and consequently,
PM (n)(A) ≤ (1− )µ(n)(A)
≤ e−δ7kcn
By using the union bound, for large enough n, we get
P∃A ⊂ F (n) s.t. |A| = k and M (n)(A) ≤ (1− )µ(n)(A)
≤ e−δ7kcn
nk
≤ e−δ7kcn+k logn ≤ e−δ8kcn .
Combining the above two cases, we can show that for largeenough n there exists a positive constant δ9 such that foreach k ∈ 1, . . . , n we have
P∃A ⊂ F (n) s.t. |A| = k and M (n)(A) ≤ (1− )µ(n)(A)
≤ e−δ9gn .
Using the union bound again, we get
P∃A ⊂ F (n) s.t. M (n)(A) ≤ (1− )µ(n)(A)
≤ ne−δ9gn ≤ e−δ9gn+logn ≤ e−δ10gn .
Now, we relax the assumption µs = ξ for each s ∈ S(n)
with Assumption 1. The above proof can then be used toshow a similar concentration result for individual groups.The overall result follows by linearity of expectation and yetanother use of the union bound.
6. PERFORMANCE ROBUSTNESSWe now combine results from Section 4 and Section 5 to
exhibit performance robustness in large systems. In Sec-tion 5, we showed that large systems support symmetricpolymatroid capacity regions. This allows us to apply theperformance bounds developed in Section 4 for symmetricpolymatroid capacity regions.
However, there is one more hurdle to overcome before wecan apply our bounds from Section 4. Recall, from Corol-lary 3, under Assumptions 1 and 2 the random capacityregion contains and is contained by symmetric polymatroidswith high probability. The realizations of the random ca-pacity region, themselves, may still not be symmetric. Wethus need to show that if the capacity region is bigger thenthe corresponding mean delay is smaller when subject to thesame load.

Intuitively, larger capacity regions may imply larger ser-vice rates for each class, and may thus provide better per-formance. Although intuitively obvious, such results are notalways straightforward. We show below that such a compar-ison result indeed holds under the following monotonicityconditions for rate allocations.
Definition 5 (Monotonicity w.r.t. capacity region). Wesay that a rate allocation satisfies monotonicity w.r.t. capac-ity region if for any state x, the rate allocation per class fora system with a larger capacity region dominates that with asmaller one.
Recall, ri(x)xi
is the rate allocated to each job in class i whenthe system is in state x.
Definition 6 (Per-job rate monotonicity). We say thata rate allocation r(.) satisfies per-job rate monotonicity if thefollowing holds for all states x and x
such that x ≥ x: for
each class i, we have ri(x)xi
≤ ri(x)
xi
. In words, adding jobs
into the system only decreases the rate allocated to each job.
Note that the condition of per-job rate monotonicity is strongerthan that of per-class rate monotonicity used in Section 4.2.Per-job rate monotonicity was first used in [4] to provide acomparison result similar to the lemma below. The follow-ing lemma can be shown to hold through a simple couplingargument across jobs for arbitrary polymatroid capacity re-gions.
Lemma 3. Consider systems with arbitrary polymatroidcapacity regions C and C such that C ⊂ C. Consider a rateallocation which satisfies monotonicity w.r.t. capacity regionas well as per-job rate monotonicity. Then, the mean delayfor capacity region C under arbitrary load ρ upper boundsthat for capacity region C under the same load.
It is easy to check that α-fair rate allocation satisfies per-job rate monotonicity as well as monotonicity w.r.t. capac-ity region. Thus, Lemma 3 holds for α-fair rate allocation.However, one can show that Greedy rate allocation may notsatisfy either property for arbitrary polymatroid capacityregions. This further highlights the brittleness of Greedyrate allocation to asymmetries. Even for Balanced fair rateallocation it is not directly clear if the lemma holds. Thus,henceforth we will only consider α-fair rate allocation.
Now we are indeed ready with all the tools required toexhibit robustness in large scale systems.
Assumption 3 (Load Heterogeneity). We consider a se-
quence of systems where load ρ(n) for each n is allowed tobe within a set B(n) defined as follows: Consider a sequence(θn : n ∈ N) such that θn = ω(1), θn = o( n
logn), and
θn = o(cn). Also, fix a constant γ < 1 independent of n.For each n:
B(n) ρ : max
i∈F (n)ρi ≤ θn and |ρ| ≤ γξm
.
The condition |ρ| ≤ γξm implies that we allow load to in-crease linearly with system size. Also, since θn = ω(1), thecondition maxi ρi ≤ θn implies that we allow load acrossservers to be increasingly heterogeneous. The conditionθn = o( n
logn) limits the heterogeneity allowed in the system.
Further, the condition θn = o(cn) would allow us to claim
stability, and to show that the mean delay of the systemtends to 0 as n increases.
The following is the main result of this section.
Theorem 5. Consider a sequence of systems with n filesF (n) and m = bn servers S(n), where b is a constant.For each n, let the total service capacity of servers be ξm,where ξ is independent of n. S(n) is partitioned into a finitenumber of heterogeneous groups, each with Ω(n) servers andequal per-server capacity. Let (cn : n ∈ N) be a sequencesuch that cn = ω(log n). We allow cn copies of each file tobe placed across the servers.
Let the mean service requirement of file-download jobs beν, where ν is independent of n. Let (θn : n ∈ N) be such that
θn = ω(1), but omin( n
logn, cn)
. Fix a constant γ < 1. Let
B(n) = ρ : maxi ρi ≤ θn and |ρ| ≤ γξm. For each n, letload across file classes be ρ(n) ∈ B(n).
Fix a constant δ > 1. Then, there exists an integer nδ
such that for each n ≥ nδ the following holds: there existsat least one file placement policy such that the mean delayfor file-download jobs with α-fair rate allocation satisfies thefollowing bound:
E[D(n)] ≤ δνθnξcn
1γlog
1
1− γ
.
Further, for each n ≥ nδ, if the cn copies of each file arestored uniformly at random across servers, then the abovebound holds with high probability.
6.1 Proof of Theorem 5We first show the existence of a file placement policy such
that the mean delay bound is satisfied. Without loss ofgenerality, assume δ < 1
γ.
From Corollary 3, and definitions of C(n) and µ(n)(.), forlarge enough n there exists a file placement such that thecorresponding capacity region contains the following sym-metric polymatroid:
C(n) r ≥ 0 :
i∈A
ri ≤ h(n)(|A|), ∀A ⊂ F (n)
,
where
h(n)(k) (1/δ)ξm1− e−
kcnm
∀k = 0, 1, . . . , n.
Thus, from Lemma 3, for α-fair rate allocations it is suffi-cient to consider C(n). Further, since C(n) is monotonic incn, it is sufficient to assume that cn = o( n
logn) since, if it
is not, we can set cn to be equal to
n
lognθn and all the
assumptions still hold. Thus, henceforth we assume that
cn = o(n
log n).
Let ξ ξ/δ. Thus, we get
h(n)(k) = ξm1− e−
kcnm
∀k = 0, 1, . . . , n.
Since γξm < ξm and θn = o(cn), one can check that B(n)
is a subset of C(n) for large enough n, and we get stability.
Let tn
γξm
θn
. Let A(n) be an arbitrary subset of F (n)
such that |A(n)| = tn. Let ρ(n) = (ρ(n)i
: i ∈ F (n)) where

ρ(n)i
= θn if i ∈ A(n) and 0 otherwise. Then, it is easy toshow that for each n, we have
B(n) ⊂ρ : ρ ≺w ρ(n)
.
Thus, from Theorem 3, it is sufficient to show that thebound on mean delay holds for balanced fair rate allocationunder load ρ(n) = ρ(n).
Henceforth, we assume BF rate allocation and let loadρ(n) = ρ(n). For each n, we invoke Proposition 4 with ρreplaced by θn and n replaced by tn, where for each k =0, 1, . . . , tn we let1
π(n)k
Fk(θn)F (θn)
, and τ (n)k
Fk(θn)F (θn)
.
Then, we have
E[D(n)] = νtn
k=1
ktn
τ (n)k
. (13)
Also, we have τ (n)0 = 0, π(n)
0 = 1/F (θn), and for each k =1, . . . , tn we have
π(n)k
=(tn − k + 1)θnh(n)(k)− kθn
π(n)k−1, (14)
and
τ (n)k
=π(n)k
+ tn−k+1k
π(n)k−1 +
(tn−k+1)(k−1)k
θnτ(n)k−1
h(n)(k)− kθn. (15)
First, we show the following result.
Theorem 6. For any positive constants > 1 and < 1independent of n, there exists a constant δ < 1 such thatfor large enough n we have
b log( 11−γ ) n
cn
k=b log( 11−γ ) n
cn
π(n)k
≥ 1− δmcn . (16)
Proof. Fix a constant 0 < δ11 < 1. Let
k(n)↓ =
mcn
log
1
1− γδ11
.
Then, we have h(n)(k↓) = γδ11ξm. In fact, we have h(n)(k) ≤
γδ11ξm, ∀k ≤ k(n)
↓ . Using (14), for each k ≤ k(n)↓ , we have
π(n)k
≥ (tn − k + 1)θnγδ11ξm− kθn
π(n)k−1 ≥
tnθn − (k(n)↓ − 1)θn
γδ11ξmπ(n)k−1
=γξm− o(n)γδ11ξm
π(n)k−1 ≥ 1
δ12π(n)k−1,
for a positive constant δ12 such that δ11 < δ12 < 1, and largeenough n. Equivalently, π(n)
k≤ δ12π
(n)k+1 ∀k < k(n)
↓ . Fix a
positive constant 1 < 1. Then, for all k < 1k(n)↓ , we have
π(n)k
≤ δ(1−1)k
(n)↓
12 π(n)
k(n)↓
1If π(n)(x) stationary distribution of the queue length pro-
cess for the nth system, then π(n)k
has the following interpre-
tation: π(n)k
=
x:|Ax|=kπ(n)(x) for k = 1, . . . , tn.
Similarly, for a constant δ13 such that γ < δ13 < 1, a
constant 2 > 1, and k(n)↑ = m
cnlog
1
1−γ/δ13
one can show
that there exists a constant δ14 < 1 such that
π(n)k
≤ δ(2−1)k
(n)↑
14 π(n)
k(n)↑
∀k > 2k(n)↑
Thus, we get
1 =tn
k=0
π(n)k
=
1k(n)↓ −1
k=0
πk +
2k(n)↑
k=1k(n)↓
π(n)k
+tn
2k(n)↑ +1
π(n)k
≤ (1k(n)↓ )δ
(1−1)k(n)↓
12 +
2k(n)↑
k=1k(n)↓
π(n)k
+tn − 2k
(n)↑
δ(2−1)k
(n)↑
14
≤ nδ(1−1)k
(n)↓
12 + nδ(2−1)k
(n)↑
14 +
2k(n)↑
k=1k(n)↓
π(n)k
= δδ15
mcn
−logδ12 n
12 + δδ17
mcn
−logδ14 n
14 +
2k(n)↑
k=1k(n)↓
π(n)k
,
for suitably chosen positive constants δ15, and δ17. Thus,the theorem follows by noting that 1, 2, δ11, and δ13 can bechosen arbitrarily close to 1.
We now use (15) to provide a slightly simpler bound on τ (n)k
.
Lemma 4. For large enough n, we get,
τ (n)k
≤ (tn − k + 1)θnh(n)(k)− kθn
1kπ(n)k−1 +
k − 1k
τ (n)k−1
,
for each k = 1, . . . , tn.
Proof. Using (14) in (15), we get
τ (n)k
=
(tn − k + 1)θnh(n)(k)− kθn
π(n)k−1 +
tn − k + 1k
π(n)k−1
+(tn − k + 1)(k − 1)
kθnτ
(n)k−1
h(n)(k)− kθn
=(tn − k + 1)θnh(n)(k)− kθn
1
h(n)(k)− kθn+
1kθn
π(n)k−1
+k − 1k
τ (n)k−1
.
Now, we have the lemma if we show that for large enough
n, we have
1h(n)(k)−kθn
+ 1kθn
≤ 1
kfor each k = 1, . . . , tn.
This can be shown as follows.One can show that Lemma 1 holds even when p(n)
k=
1 − e−kcnm . Using gn = θn
γξb , we get h(n)(k) = ξbnp(n)k
≥δ20γkθn for large enough n and some constant δ20 such that
γ < δ20 < 1. Thus, (h(n)(k) − kθn) ≥ ( δ20γ
− 1)kθn. For
large enough n, ( δ20γ
−1)θn ≥ 2, and thus, (h(n)(k)−kθn) ≥2k. Similarly, for large enough n, kθn ≥ 2k. Hence thelemma.

Following lemma provides an even simpler bound on τ (n)k
.
Lemma 5. For large enough n, we get,
τ (n)k
≤ π(n)k
for each k ∈ 1, . . . , tn.
Proof. Fix n large enough such that the bound in Lemma 4holds. We prove the result using induction on k. Considerthe base case of k = 1. From Lemma 4 and (14) we have
τ (n)1 ≤ (tn − 1 + 1)θn
h(n)(1)− θnπ(n)0 = π(n)
1 .
Now, let us assume that the lemma holds for k = k−1, i.e.,τ (n)k−1 ≤ π(n)
k−1. Using this, we show below that the lemmaholds for k = k as well.
From Lemma 4 and induction hypothesis we have
τ (n)k ≤ (tn − k + 1)θn
h(n)(k)− kθn
1k π
(n)k−1 +
k − 1k π(n)
k−1
= π(n)
k ,
where the last equality follows from (14). Hence, the lemma.
Using above lemma and (13), we get
E[D(n)] ≤ νtn
k=1
ktn
π(n)k
.
Or equivalently,
1νE[D(n)] =
b log( 11−γ ) n
cn
k=1
ktn
π(n)k
+tn
k=b log( 11−γ ) n
cn+1
ktn
π(n)k
.
We now use Theorem 6 to prove the main result. FromTheorem 6, we have
1νE[D(n)] ≤
b log( 11−γ ) n
cn
k=1
ktn
π(n)k
+ δmcn
≤ b log
1
1− γ
n
cntn
b log( 11−γ ) n
cn
k=1
π(n)k
+ δmcn
≤ log
1
1− γ
θn
γξcn+ δ
mcn ,
where in last inequality we used definition of tn. The firstpart of the theorem thus follows from definition of ξ, andthe fact that and δ where chosen arbitrarily.
Further, from Corollary 3, upon randomly placing cn copiesof each file, the associated random capacity region containsC(n) with high probability. Hence, the second part followsas well.
7. CONCLUSIONSOur main conclusions address both practical and theoret-
ical aspects associated with such systems. CDN systems ad-dress potential high demands by maintaining multiple copiesof content – server diversity. At the same time there has beenincreasing interest in adopting multipath transport protocolsto improve reliability and throughput. Our results show thatinfrastructure combining multipath transport with server di-versity scales well even when subject to substantial vari-ations in per file demands. Specifically, if CDN capacity
(servers) scale with total load, and memory per server isproportional to worst case per file demand variability thenaverage download delays will scale, i.e., are asymptoticallynegligible. This suggests a scalable approach towards ad-dressing the delivery of popular content without requiringcomplex caching strategies.
On the theoretical side we have established: (1) basic newresults linking fairness in resource allocation to delays and(2) the asymptotic symmetry of randomly configured large-scale systems with heterogenous components. Together theseresults suggest large systems might eventually be robust toheterogeneity and fairness criterion.
8. REFERENCES[1] T. Bonald. Throughput performance in networks with
linear capacity contraints. In Proceedings of CISS,pages 644 –649, 2006.
[2] T. Bonald, L. Massoulie, A. Proutiere, andJ. Virtamo. A queueing analysis of max-min fairness,proportional fairness and balanced fairness. QueueingSystems, 53:65–84, 2006.
[3] T. Bonald and A. Proutiere. Insensitive bandwidthsharing in data networks. Queueing Systems,44:69–100, 2003.
[4] T. Bonald and A. Proutiere. On stochastic bounds formonotonic processor sharing networks. QueueingSystems, 47:81–106, 2004.
[5] T. Bonald, A. Proutiere, J. Roberts, and J. Virtamo.Computational aspects of balanced fairness. InProceedings of ITC, 2003.
[6] T. Bonald and J. Virtamo. Calculating the flow levelperformance of balanced fairness in tree networks.Perform. Eval., 58(1):1–14, Oct. 2004.
[7] G. de Veciana, T.-J. Lee, and T. Konstantopoulos.Stability and performance analysis of networkssupporting elastic services. IEEE/ACM Transactionson Networking, 9(1):2–14, Feb. 2001.
[8] D. Dubhashi and D. Ranjan. Balls and bins: A studyin negative dependence. Random Structures &Algorithms, 13(2):99–124, 1998.
[9] J. Edmonds. Submodular functions, matroids, andcertain polyhedra. In Proceedings of CalgaryInternational Conference on Combinatorial Structuresand Applications, pages 69–87, 1969.
[10] B. Frank, I. Poese, G. Smaragdakis, A. Feldmann,B. M. Maggs, S. Uhlig, V. Aggarwal, andF. Schneider. Collaboration opportunities for contentdelivery and network infrastructures. In H. Haddadiand O. Bonaventure, editors, Recent Advances inNetworking, pages 305–377. ACM SIGCOMM ebook,2013.
[11] V. Joseph and G. de Veciana. Stochastic networkswith multipath flow control: Impact of resource poolson flow-level performance and network congestion. InProceedings of the ACM Sigmetrics, pages 61–72, 2011.
[12] F. P. Kelly, A. K. Maulloo, and D. K. H. Tan. Ratecontrol for communication networks: Shadow prices,proportional fairness and stability. The Journal of theOperational Research Society, 49(3):237–252, 1998.
[13] T. Lan, D. Kao, M. Chiang, and A. Sabharwal. Anaxiomatic theory of fairness in network resource

allocation. In Proceedings of IEEE Infocom, pages 1–9,March 2010.
[14] M. Leconte, M. Lelarge, and L. Massoulie. Adaptivereplication in distributed content delivery networks.arXiv preprint arXiv:1401.1770, 2014.
[15] X. Lin and N. Shroff. Utility maximization forcommunication networks with multipath routing.IEEE Transactions on Automatic Control, 51(5):766 –781, May 2006.
[16] A. W. Marshall, I. Olkin, and B. C. Arnold.Inequalities: Theory of Majorization and ItsApplications. Springer, 2nd edition, 2011.
[17] L. Massoulie and J. Roberts. Bandwidth sharing andadmission control for elastic traffic.Telecommunication Systems, 15(1-2):185–201, 2000.
[18] M. Mitzenmacher and E. Upfal. Probability andComputing: Randomized Algorithms and ProbabilisticAnalysis. Cambridge University Press, 2005.
[19] J. Mo and J. Walrand. Fair end-to-end window-basedcongestion control. IEEE/ACM Transactions onNetworking, 8(5):556 –567, Oct. 2000.
[20] S. Moharir, J. Ghaderi, S. Sanghavi, andS. Shakkottai. Serving content with unknown demand:The high-dimensional regime. In Proceedings of ACMSigmetrics, pages 435–447, 2014.
[21] G. L. Nemhauser and L. A. Wolsey. Integer andcombinatorial optimization, volume 18. Wiley, 1988.
[22] V. Shah and G. de Veciana. Performance evaluationand asymptotics for content delivery networks. InIEEE Infocom, pages 2607–2615, 2014.
[23] J. N. Tsitsiklis and K. Xu. Queueing systemtopologies with limited flexibility. In Proceedings ofACM Sigmetrics, pages 167–178, 2013.
[24] E. Yeh. Multiaccess and fading in communicationnetworks. PhD thesis, Massachusetts Institute ofTechnology, 2001.
APPENDIXA.1 Proof of Theorem 1Consider the following lemma regarding relative greedi-
ness of αF and BF.
Lemma 6. Consider states x and y such that x ≺w
y. For each k such that
k
l=1 x[l] =
k
l=1 y[l], we havek
l=1 rα
(l)(x) ≥
k
l=1 rB
(l)(y).
Roughly, it asserts that if state x is same or more balancedthan state y, then the sum rate assigned to larger queuesby αF to state x is greater than that by BF to state y.Proof of this lemma is summarized in A.2. Below, we pro-vide a detailed coupling argument showing stochastic weak-majorization using this lemma.Coupling Argument:Without loss of generality, assume
ν = 1. Suppose Xα(0) ≺w X
B(0). Below, we couple thearrivals and departures of processes (Xα(t) : t ≥ 0) and(XB(t) : t ≥ 0) such that their marginal distributions re-main intact and X
α(t) ≺w XB(t) almost surely for each
t ≥ 0.Let Πa be a Poisson point process with rate
i∈F
λi,and let Πd be Poisson point process with rate µ(F ). Thepoints in these processes are the times of ‘potential events’in (XB(t) : t ≥ 0) and (Xα(t) : t ≥ 0). We use Πa to couple
arrivals and Πd to couple departures. For each time t whena potential event occurs, let t be a small enough numbersuch that no potential event occurred in the time interval of[t − t , t
).Coupling of arrivals: For each point t in Πa, do the
following: Choose a random variable Zt independently anduniformly from 1, . . . , n. Let an arrival occur in (Xα(t) :t ≥ 0) at time t in the Zth
t largest queue of Xα(t−t). Tiesare broken uniformly at random. Similarly, let an arrivaloccur in (Xα(t) : t ≥ 0) at time t in the Zth
t largest queueof Xα(t− t). Again, ties are broken uniformly at random.
Coupling of departures: For each point t of incrementin Πd, do the following: Choose a random variable Zt inde-pendently and uniformly from interval (0, µ(F )]. For k suchthat
Zt ∈
k−1
l=1
rα(l)(Xα(t − t)),
k
l=1
rα(l)(Xα(t − t))
,
let a departure occur in (Xα(t) : t ≥ 0) at time t in the kth
largest queue of Xα(t− t), with ties broken uniformly andindependently at random.
Similarly, for k such that
Zt ∈
k−1
l=1
rB(l)(XB(t − t)),
k
l=1
rB(l)(XB(t − t))
,
let a departure occur in (XB(t) : t ≥ 0) at time t in thekth largest queue of XB(t− t), with ties broken uniformlyand independently at random. Note that in both cases it ispossible that no such k exists since some classes may not beactive and the total service rate may be less than µ(F ). Inthat case, no departure occurs.
It can be checked that the marginal distributions of (Xα(t) :t ≥ 0) and (XB(t) : t ≥ 0) remain intact. We now show thatX
α(t) ≺w XB(t) almost surely for each t.
It is easy to check that if an arrival occurred at time t andif Xα(t) ≺w X
B(t) for each t < t, then Xα(t) ≺w X
B(t)as well. We now show that the same holds for points of Πd
as well.Suppose a potential departure occurred at t, andX
α(t) ≺w
XB(t) for each t < t. We show below that
k
l=1 Xα
[l](t) ≤
k
l=1 XB
[l](t) for each k. Here, we use Lemma 6. Following
two cases arise.Case 1:
k
l=1 Xα
[l](t − t) <
k
l=1 XB
[l](t − t). A maxi-
mum of one departure occurs at time t in either processes.Thus we have
k
l=1 Xα
[l](t) ≤
k
l=1 XB
[l](t).
Case 2:
k
l=1 Xα
[l](t − t) =
k
l=1 XB
[l](t − t). By using
Xα(t − t) ≺w X
B(t − t) in Lemma 6 and from the def-inition of the coupling at time t, it can be shown thatif a departure occurs from any of the k largest queues inX
B(t−t), then it also occurs in one of the k largest queuesin X
α(t − t). Thus,
k
l=1 Xα
[l](t) ≤
k
l=1 XB
[l](t).
Hence the result.
A.2 Relative greediness and other rateallocation properties
Below, we outline a proof of Lemma 6 which asserts thatαF is more greedy than BF. Along the way, we develop sev-eral other properties of the rate allocation policies.
Proof of Lemma 6 stems on the following two fundamentalproperties of per-job rate assignment for αF and BF.

1.) αF gives the most balanced per-job rate allocation: Theproperty follows from the fact that αF is equivalent to max-min fair rate allocation, see Proposition 2. Formally, thisproperty implies the following:
Lemma 7. Let bα represent a vector of rates assigned
to a set of flows under αF rate allocation. Let b be the ratesassigned to the same set of flows under any other feasiblerate allocation. Then, bα ≺w
b, i.e., weak majorized fromabove.
2.) In αF and BF, the longest queues have smaller per-jobrates: For αF, this property again follows from the fact thatit is equivalent to max-min fair, and that the capacity regionis convex and symmetric. For BF, the proof for this prop-erty is technical and we omit its discussion here for brevity.Formally, this property implies the following:
Lemma 8. αF and BF rate allocations satisfy the fol-lowing property for any state x: if xi > xj then ri(x)
xi≤
rj(x)
xj.
Now, let us study what the above properties imply forper-class rate allocation. Consider a state x. Lemma 8above implies that the most disadvantaged jobs are the oneswhich belong to longest queues for both, BF and αF. This,along with Lemma 8, implies that αF provides larger rateto longest queues. Thus we get the following property.
3.) αF gives larger rate to the longest queues as comparedto BF: Formally, this property implies the following:
Lemma 9. For any state x,
k
l=1 rα
(l)(x) ≥
k
l=1 rB
(l)(x)for each k ∈ 1, 2, . . . , n.
Now, we focus on αF and study how it allocates ratesacross classes for states x and y such that x ≺ y. Intu-itively, jobs in longer queues in state y are more constrainedthan those in x. Again using the fact that αF is equivalentto max-min fair, the most constrained jobs in state y havesmaller rate than those in state x. By monotonicity of αF,this holds even when x ≺w y. When translated to per-classrate allocation in states x and y, this argument leads us tothe following property:
4.) αF gives larger rate to longer queues in more balanced
states: Formally, this property implies the following:2
Lemma 10. Consider states x and y such that x ≺w
y. For each k such that
k
l=1 x[l] =
k
l=1 y[l], we havek
l=1 rα
(l)(x) ≥
k
l=1 rα
(l)(y).
Finally, we are ready to study relative greediness of αFand BF.
5.) αF is more greedy than BF: We now prove Lemma 6.Consider states x and y such that x ≺w y. From Lemma 10we have
k
l=1 rα
(l)(x) ≥
k
l=1 rα
(l)(y), and from Lemma 9 we
have
k
l=1 rα
(l)(y) ≥
k
l=1 rB
(l)(y). Hence, Lemma 6 holds.
A.3 Technical Lemmas for proof ofTheorem 4
Lemma 1. Let a sequence (gn : n ∈ N) be such thatgn = o(cn). Let δ1 be a positive constant independent of n
2This property is also used to prove Majorization bound de-scribed in Section 4.3. Also, one can check that this propertyis satisfied by Greedy rate allocation as well.
such that δ1 < 1. Then, for large enough n, we have
p(n)k
≥ δ1gnn
k ∀k ∈0, 1, . . . ,
ngn
.
Proof. Consider a sequence of functionsf (n)(.)
n≥1
where for each n, f (n)(t) = 1 − (1 − 1/(bn))tcn for eacht ∈ R+. Then,
f (n) (n/gn) = 1− (1− 1/(bn))ncngn
n→∞−→ 1.
Thus, there exists an integer n such that f (n) (n/gn) ≥ δ1for all n ≥ n. Also, f (n)(0) = 0 for each n. Using concavityof f (n)(.), for each n ≥ n we have
f (n) (t) ≥ f (n) (n/gn)(n/gn)
t, ∀t s.t. 0 ≤ t ≤ n/gn.
Hence, the lemma.
Lemma 2. There exists a positive constant δ such that
Hp(n)k
(1− )||p(n)k
≥ −δ + kcn
m.
Proof. From definition,
Hp(n)k
(1− )||p(n)k
= p(n)
k(1− ) log(1− )
+ (1− p(n)k
(1− )) log
1− p(n)
k(1− )
1− p(n)k
Here, the term p(n)k
(1−) log(1−), while negative, is greaterthan (1 − ) log(1 − ), a constant. Similarly, the term
(1 − p(n)k
(1 − )) log1− p(n)
k(1− )
is negative, but can
be upper-bounded by a constant as follows:
(1−p(n)k
(1−)) log1− p(n)
k(1− )
≥ log
1− p(n)
k(1− )
≥ log(1− (1− )) = log
Thus, we have
Hp(n)k
(1− )||p(n)k
≥ −δ + (1− p(n)
k(1− )) log
1
1− p(n)k
≥ −δ + (1− (1− )) log
1
1− p(n)k
= −δ + log
1
1− p(n)k
≥ −δ + kcnm
,
where in the last inequality we used the fact that 1− p(n)k
≤e−
kcnm .