Impact of Accuracy, Spatial Availability, and Revisit Time of Satellite-Derived Surface Soil...
8
IEEE JOURNAL OF SELECTED TOPICS IN APPLIED EARTH OBSERVATIONS AND REMOTE SENSING, VOL. 3, NO. 1, MARCH 2010 49 Impact of Accuracy, Spatial Availability, and Revisit Time of Satellite-Derived Surface Soil Moisture in a Multiscale Ensemble Data Assimilation System Ming Pan and Eric F. Wood Abstract—This study evaluates the sensitivity of a multiscale en- semble assimilation system to different configurations of satellite soil moisture observations, namely the retrieval accuracy, spatial availability, and revisit time. We perform horizontally coupled as- similation experiments where pixels are updated not only by ob- servations at the same location but also all in the study domain. Carrying out sensitivity studies within a multiscale assimilation system is a significant advancement over previous studies that used a 1-D assimilation framework where all horizontal grids are uncou- pled. Twin experiments are performed with synthetic soil moisture retrievals. The hydrologic modeling system is forced with satel- lite estimated rainfall, and the assimilation performance is eval- uated against model simulations using in-situ measured rainfall. The study shows that the assimilation performance is most sensi- tive to the spatial availability of soil moisture observations, then to revisit time and least sensitive to retrieval accuracy. The horizon- tally coupled assimilation system performs reasonably well even with large observation errors, and it is less sensitive to retrieval ac- curacy than the uncoupled system, as reported by previous studies. This suggests that more information may be extracted from satel- lite soil moisture observations using multiscale assimilation sys- tems resulting in a potentially higher value of such satellite prod- ucts. Index Terms—Data assimilation, multiscale, remote sensing, soil moisture. I. INTRODUCTION S OIL moisture is a key land surface state variable for its important role in regulating the energy and moisture fluxes between the atmosphere and land surface. Better knowledge of soil moisture greatly contributes to our understanding of land surface processes [1]–[3]. Moreover, since the land surface serves as the boundary condition for weather and seasonal forecasting models, refining the soil moisture estimate that is used in their initialization will improve accuracy of the short-term and seasonal forecasts in many occasions [4], [5]. Therefore, there have been efforts in developing soil moisture observational networks [6], evaluating soil moisture as mod- eled by land surface schemes [7] and climate models [8], and developing assimilation system to utilize satellite retrieved soil Manuscript received February 28, 2009; revised September 21, 2009. This work was supported by the U.S. National Aeronautic and Space Administration under Grants NNG06GD79G and NNX07AK41G. Current version published February 24, 2010. The authors are with the Department of Civil and Environmental Engineering, Princeton University, Princeton, NJ 08544 USA (e-mail: [email protected]; [email protected]). Digital Object Identifier 10.1109/JSTARS.2010.2040585 moisture [9]–[11]. Retrieving near surface soil moisture by satellite sensors at microwave frequencies (passive or active) is very promising for its large spatial coverage and reasonable penetration depth [3], [12], [13]. Recently, [14] has compared satellite retrieved soil moisture from passive and active mi- crowave sensors. However, satellite retrievals are derived from electromagnetic emission/scattering properties of the soil and overlying vege- tation and so are only indirectly related to the physical soil moisture. Also, there is significant uncertainty in the retrieved soil moisture estimates due to vegetation coverage, open water bodies, unknown atmospheric conditions, as well as the uncer- tainties in the retrieval model parameters [15]. This leads to the challenge of how to most effectively use satellite soil moisture estimates in a way that 1) is consistent with how the soil mois- ture variable is defined in a land surface or weather forecast model, and at the same time 2) properly handles the uncertain- ties or errors in the estimates. Data assimilation techniques [16], [17] are used to merge inaccurate observations (space-borne or ground-based) with model predictions to obtain consistent es- timates with all the uncertainties properly assessed. Most data assimilation systems are built upon a dynamic model and uti- lize optimal estimation techniques for dynamic systems, for ex- ample, different types of Kalman filters and variational methods [18], [19]. Data assimilation not only addresses estimation un- certainties, but also propagates information about the surface soil moisture into the entire modeling system where other state and flux variables (e.g., deep layer soil moisture) are also pre- dicted. For a data assimilation system to provide the correct weighting between the model predictions and satellite retrieved estimates, the accuracy of the inputs, i.e., the error levels in the model and retrievals need to be known. To date, this remains a challenging issue, and the error parameters provided by remote sensing data providers usually do not work well in the assimi- lation experiments using that data. The situation exists because 1) most validation studies for retrievals make comparisons to in-situ point measurements and there are mismatches on both the horizontal scale and depth of detection; 2) the behaviors of model and retrievals are different, which makes it even harder to determine the appropriate error parameters in data assimilation. This is partly why some data assimilation studies still use synthetically generated observations instead of real satellite data – the modeling and observation errors can be prescribed [16], [19], as many others already start to test real satellite retrievals [10], [11]. Yet, without better error estimates, 1939-1404/$26.00 © 2010 IEEE
Transcript of Impact of Accuracy, Spatial Availability, and Revisit Time of Satellite-Derived Surface Soil...

IEEE JOURNAL OF SELECTED TOPICS IN APPLIED EARTH OBSERVATIONS AND REMOTE SENSING, VOL. 3, NO. 1, MARCH 2010 49
Impact of Accuracy, Spatial Availability, and RevisitTime of Satellite-Derived Surface Soil Moisture in a
Multiscale Ensemble Data Assimilation SystemMing Pan and Eric F. Wood
Abstract—This study evaluates the sensitivity of a multiscale en-semble assimilation system to different configurations of satellitesoil moisture observations, namely the retrieval accuracy, spatialavailability, and revisit time. We perform horizontally coupled as-similation experiments where pixels are updated not only by ob-servations at the same location but also all in the study domain.Carrying out sensitivity studies within a multiscale assimilationsystem is a significant advancement over previous studies that useda 1-D assimilation framework where all horizontal grids are uncou-pled. Twin experiments are performed with synthetic soil moistureretrievals. The hydrologic modeling system is forced with satel-lite estimated rainfall, and the assimilation performance is eval-uated against model simulations using in-situ measured rainfall.The study shows that the assimilation performance is most sensi-tive to the spatial availability of soil moisture observations, then torevisit time and least sensitive to retrieval accuracy. The horizon-tally coupled assimilation system performs reasonably well evenwith large observation errors, and it is less sensitive to retrieval ac-curacy than the uncoupled system, as reported by previous studies.This suggests that more information may be extracted from satel-lite soil moisture observations using multiscale assimilation sys-tems resulting in a potentially higher value of such satellite prod-ucts.
Index Terms—Data assimilation, multiscale, remote sensing, soilmoisture.
I. INTRODUCTION
S OIL moisture is a key land surface state variable for itsimportant role in regulating the energy and moisture fluxes
between the atmosphere and land surface. Better knowledge ofsoil moisture greatly contributes to our understanding of landsurface processes [1]–[3]. Moreover, since the land surfaceserves as the boundary condition for weather and seasonalforecasting models, refining the soil moisture estimate thatis used in their initialization will improve accuracy of theshort-term and seasonal forecasts in many occasions [4], [5].Therefore, there have been efforts in developing soil moistureobservational networks [6], evaluating soil moisture as mod-eled by land surface schemes [7] and climate models [8], anddeveloping assimilation system to utilize satellite retrieved soil
Manuscript received February 28, 2009; revised September 21, 2009. Thiswork was supported by the U.S. National Aeronautic and Space Administrationunder Grants NNG06GD79G and NNX07AK41G. Current version publishedFebruary 24, 2010.
The authors are with the Department of Civil and Environmental Engineering,Princeton University, Princeton, NJ 08544 USA (e-mail: [email protected];[email protected]).
Digital Object Identifier 10.1109/JSTARS.2010.2040585
moisture [9]–[11]. Retrieving near surface soil moisture bysatellite sensors at microwave frequencies (passive or active)is very promising for its large spatial coverage and reasonablepenetration depth [3], [12], [13]. Recently, [14] has comparedsatellite retrieved soil moisture from passive and active mi-crowave sensors.
However, satellite retrievals are derived from electromagneticemission/scattering properties of the soil and overlying vege-tation and so are only indirectly related to the physical soilmoisture. Also, there is significant uncertainty in the retrievedsoil moisture estimates due to vegetation coverage, open waterbodies, unknown atmospheric conditions, as well as the uncer-tainties in the retrieval model parameters [15]. This leads to thechallenge of how to most effectively use satellite soil moistureestimates in a way that 1) is consistent with how the soil mois-ture variable is defined in a land surface or weather forecastmodel, and at the same time 2) properly handles the uncertain-ties or errors in the estimates. Data assimilation techniques [16],[17] are used to merge inaccurate observations (space-borne orground-based) with model predictions to obtain consistent es-timates with all the uncertainties properly assessed. Most dataassimilation systems are built upon a dynamic model and uti-lize optimal estimation techniques for dynamic systems, for ex-ample, different types of Kalman filters and variational methods[18], [19]. Data assimilation not only addresses estimation un-certainties, but also propagates information about the surfacesoil moisture into the entire modeling system where other stateand flux variables (e.g., deep layer soil moisture) are also pre-dicted.
For a data assimilation system to provide the correctweighting between the model predictions and satellite retrievedestimates, the accuracy of the inputs, i.e., the error levels in themodel and retrievals need to be known. To date, this remains achallenging issue, and the error parameters provided by remotesensing data providers usually do not work well in the assimi-lation experiments using that data. The situation exists because1) most validation studies for retrievals make comparisons toin-situ point measurements and there are mismatches on boththe horizontal scale and depth of detection; 2) the behaviorsof model and retrievals are different, which makes it evenharder to determine the appropriate error parameters in dataassimilation. This is partly why some data assimilation studiesstill use synthetically generated observations instead of realsatellite data – the modeling and observation errors can beprescribed [16], [19], as many others already start to test realsatellite retrievals [10], [11]. Yet, without better error estimates,
1939-1404/$26.00 © 2010 IEEE

50 IEEE JOURNAL OF SELECTED TOPICS IN APPLIED EARTH OBSERVATIONS AND REMOTE SENSING, VOL. 3, NO. 1, MARCH 2010
it is difficult to assess the contribution of satellite observationsto a modeling system or to provide guidance for the design ofsensor, orbit, and related retrieval algorithms.
The goal of the work reported in this paper is to assess theimpact of soil moisture retrieval characteristics on the perfor-mance of a data assimilation system, namely accuracy, spatialavailability, and revisit time. In other words, we test the sensi-tivity of the data assimilation system to these factors. A verycomprehensive sensitivity study was done in [20] using hori-zontally uncoupled Extended Kalman Filter (EKF) over NorthAmerica, and [21] also did sensitivity test and found assimila-tion improvements are more sensitive to model errors than toobservation errors. We focus on passive microwave measure-ments. Because it is difficult to know exactly the actual errors insatellite products, we test them in the assimilation system usinga range of possible settings.
The sensitivity analysis will be carried out by running twinassimilation experiments with synthetically generated soilmoisture observations. The analysis considers three factors:retrieval accuracy (measured in terms of a root mean squarederror (RMSE)), spatial availability (measured in terms offraction of missing observations due to factors such as heavyvegetation, active occurrence of rain during an overpass, etc.),and revisit time (the time between two satellite overpasses anda function of the satellite orbit characteristics). We considerthese three factors among the most uncertain ones for soilmoisture remote sensing. Retrieval accuracy varies due to dif-ferent vegetation, soil, and meteorological conditions, as wellas to the uncertainty from different retrieval algorithms. Spatialavailability varies among different land surface properties usedin the algorithms and surface meteorological conditions (e.g.,snow, active rainfall, frozen ground). Retrieval accuracy and“retrievability” highly depend on vegetation optical thicknessbecause heavy vegetation not only greatly attenuates the soilemission signals but its own emission adds to soil signals.Revisit time is fixed for one sensor/satellite, but adding moresatellites can add more overpasses. Both the newly launchedEuropean Space Agency’s (ESA) Soil Moisture and OceanSalinity (SMOS) mission [22] and the scheduled NationalAeronautic and Space Administration’s (NASA) Soil MoistureActive and Passive (SMAP) mission [23] carry microwavesensors.
In this study, the impact of the spatial resolution is not inves-tigated even though the multiscale framework being used hereis capable of assimilating observations at different resolutions.The reason is the lack of potential dramatic improvement on theresolution of passive microwave retrievals due to limits on an-tenna size. The in-mission Advance Microwave Scanning Ra-diometer on board of EOS (AMSR-E) sensor has a footprintof around 51 km 30 km for the 10.65 GHz channel and an-other in-mission sensor TRMM Microwave Imager (TMI) has asimilar footprint size for the same channel. With oversampling(overlapped neighboring footprints), the final AMSR-E 10.65-GHz-based soil moisture products can be made at km res-olution, even though oversampling does not provide informa-tion at resolution finer than the radiometer capacity. Finer res-olution would require a larger antenna (much larger, given the
long wavelength) or a lower orbit, but both options seem infea-sible in the near future due to technical difficulties and resultingcompromises on swath width, revisit time, and so forth. Futuremissions like SMAP are proposing a 10-km retrieval product bycombining its lower resolution ( km footprint and kmdata product with over sampling) passive measurements withhigher resolution active microwave measurements. So the syn-thetic soil moisture observations throughout this study will begenerated at a 0.25 resolution (20–25 km).
The structure of this study is very similar to [20], but theassimilation system used here is quite different. [20] performspixel by pixel (i.e., horizontally uncoupled) assimilation ex-periments using EKF, in which only the satellite observationover the same pixel would be assimilated. We apply a multi-scale ensemble assimilation system [24]–[26] and perform fullyhorizontally coupled assimilation experiments, i.e., all observa-tions will be used to update every pixel. Horizontally uncoupledassimilation is low-dimensional and computationally simple,but it ignores the potentially useful information in the obser-vations made at neighboring pixels [24]. Consequently, conclu-sions drawn in an uncoupled assimilation experiment may un-derestimate the value of the satellite data. Note that our find-ings cannot be directly compared to [20] because there are othermajor differences than the filtering method, e.g., we use a dif-ferent land surface models (TOPMODEL versus VIC) and dif-ferent parameter ranges in our experiments.
Section II briefly presents the multiscale ensemble data as-similation system and the techniques used to generate the high-dimensional rainfall ensembles. Section III describes the exper-iments and presents the results, followed by a discussion andconclusions in Section IV.
II. MULTISCALE ENSEMBLE DATA ASSIMILATION SYSTEM
To facilitate horizontally coupled assimilation of soil mois-ture fields, the state vector is usually written to include all thepixels on the modeling grid. This leads to a very large statevector. For example, a land surface model simulating a regionaldomain may have pixels in their computational grid.As most assimilation algorithms have their computational com-plexity grow cubically against the state vector size, the compu-tational cost of coupled assimilation for large domains becomesextremely high. Many techniques have been proposed to alle-viate the computational complexity; for example, through sin-gular value decomposition [27]. Another example is the covari-ance localization techniques together with sequential local up-dates [28]–[30], which provides a fast solution to large coupledassimilation problems.
We adopt a multiscale framework [31]. This multiscaleframework provides a very efficient, yet stable, way for solvingthe filtering (assimilation) problem of a large dynamic system.The implementation of the multiscale filtering can be rathercomplicated but the general idea is simple – to replace (i.e.,fully reproduce) a high-dimensional signal with a series oflow-dimensional signals across different scales. In this frame-work, the spatial field of state variable is aggregated recursivelyinto coarser and coarser scales, forming a multiscale tree ofstates. The topology of the multiscale tree used in this study

PAN AND WOOD: IMPACT OF ACCURACY, SPATIAL AVAILABILITY, AND REVISIT TIME OF SATELLITE-DERIVED SURFACE SOIL MOISTURE 51
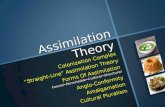
Fig. 1. Mean vegetation water content (VWC) in July and August (kg�m ) over the Red Arkansas river basin, plotted on top of the 1062-pixel computational gridat 0.25 resolution and the “multiscale tree” defined for the grid.
over the computational grid can be found in Fig. 1. Coarse scalestates on such a multiscale tree are specially crafted such thatcertain Markov property across scales is satisfied [32]. Basedon this Markov property, the large filtering problem is thenbroken down to many small filtering problems up and downalong the tree, greatly reducing the computations needed. [33]provides a detailed analysis on computational savings. Thismultiscale filtering procedure has been adapted to operate inensemble form in [26], i.e., the so-called Ensemble MultiscaleFilter (EnMSF), such that it can be conveniently applied toassimilation problems in geosciences. An EnMSF based assim-ilation system has been implemented for assimilating satelliteobservations into a land surface hydrologic model [25]. [24]developed procedures for generating ensembles of high-di-mensional rainfall field from a single satellite rainfall map,making this multiscale ensemble assimilation system usefulfor assimilation applications where actual satellite precipitationretrievals (in this case from the TRMM sensor) are used.
The assimilation system used in this study, including the landsurface model (LSM), the filtering algorithm (EnMSF), and therainfall ensemble generation, is identical to those used in [24].Most data, parameters, and other settings are also as used in[24], including the study area/period, the TRMM satellite rain-fall products used to force the LSM, the computational grid, andmost model parameters. The major difference is that the syn-thetic soil moisture observations are generated differently so asto carry out the sensitivity analysis, which is the focus of thispaper.
In our multiscale ensemble assimilation system, the VariableInfiltration Capacity (VIC) hydrologic model [34], [35] is usedas the dynamic model to derive the first guess of the hydrologicstates. VIC is a widely implemented and validated hydrologicmodel [36], [37]. The study period is the summer months (June-August) of 2004. Several storms occurred during this summer;thus, rainfall retrieval errors are relatively large and the advan-tage of assimilation will be more obvious. The Red-Arkansas
river basin ( km ) is selected as the study area (Fig. 1).Due to an east-to-west drying gradient in the precipitation cli-matology, the vegetation cover and density also follows a gra-dient: evergreen forests in the eastern part close to the Missis-sippi river, wooded grassland and cropland in the central portionof the basin, grassland in the western part, and some open shrub-land at the western tip of the basin. The vegetation water con-tent (VWC), an important measure of vegetation optical thick-ness at microwave frequencies, reaches its lowest point in themid-west part of the basins ( kg m ) and its maximum atthe eastern basin boundary ( kg m ). See Fig. 1. VWC isalso relatively high at the western edge of the basin because ofthe presence of shrubland. This wide spread in vegetation thick-ness makes the basin a good candidate for studying vegetationeffects and the subsequent impact on the spatial availability ofsatellite soil moisture retrievals. The VIC model is set up on a1062-pixel computational grid (Fig. 1) at 0.25 spatial resolu-tion, i.e., each state variable vector in the filter has 1062 ele-ments and only the top soil layer will be updated.
EnMSF is an ensemble filtering system, where the uncer-tainties associated with model derived state estimates are ex-pressed by the ensemble spread. In our case, this spread comesfrom the uncertainties in the meteorological forcing fields, andnone from the model parameters, which is also a major differ-ence between our study and [20]. This setting is reasonable fora few reasons. First, the Red-Arkansas basin is very warm inthe summer such that no snow/ice exists, and the land surfacesystem is mostly driven by external forcing inputs, especiallythe rainfall. Second, we test satellite rainfalls, whose errors arerelatively large during a stormy summer (i.e., “scaling errors”)compared with other forcing variables. Note that assuming per-fect model parameters may result in underestimating assimi-lation improvements. Most meteorological forcing fields usedhere, e.g., air temperature, radiation, and wind, are directly takenfrom the North America Land Data Assimilation System phase1 (NLDAS-1) archive [37], [38] and are not perturbed in the en-

52 IEEE JOURNAL OF SELECTED TOPICS IN APPLIED EARTH OBSERVATIONS AND REMOTE SENSING, VOL. 3, NO. 1, MARCH 2010
semble generation except for the rainfall. The rainfall forcingis created using real time Tropical Rainfall Measurement Mis-sion (TRMM) data product version 3B42RT [39]. This productis provided at 3-hourly temporal and 0.25 spatial resolution.
Rainfall ensembles are generated using the method in-troduced in [24], and each ensemble has 20 members. Thisgeneration method takes the approach of pattern-based randomsampling from historical rainfall fields plus a distributionaladjustment for the rainfall magnitude. It requires a long-termhourly rainfall database to sample from, and in our case, weutilize the 1970-current NLDAS phase 2 (NLDAS-2) rainfalldatabase [40]. First, the historical rainfall fields are aggregatedto a daily 1 level, then each day is classified to a certain“pattern”, with the number of patterns in this study set to25. Given one day of TRMM-3B42RT data (eight 3-hourlymaps), the TRMM data is also aggregated to a daily, 1 leveland classified to a “pattern”. Then random samples are drawnamong the days that belong to the same pattern as TRMM inthe historical database to create an ensemble of high resolution,hourly rainfall fields. Finally, the ensemble is adjusted for therain magnitude distribution using a CDF matching procedure[21] such that the magnitude distribution matches the observed3-hourly TRMM data. For multiscale filtering, the input ensem-bles not only provide model forecast uncertainties, but also thespatial correlation between rainfall pixels, the key informationneeded for the filter to perform horizontally coupled updates.See [24] for detailed descriptions and further discussion.
III. EXPERIMENTS AND RESULTS
As mentioned in the introduction, we test the sensitivity ofthe multiscale assimilation system to three factors relating tosoil moisture retrievals: retrieval accuracy, spatial availability,and revisit time.
For the retrieval accuracy factor, we test four RMSE levels:3%, 4%, 5%, and 6% (volumetric soil moisture). Note that allsoil moisture values or soil moisture RMSE’s in this study arevolumetric and expressed as a percentage. These values are usedin generating synthetic observations at the top 10 cm soil layer.Spatially homogenous, zero-mean Gaussian random noise isadded to the generated reference soil moisture fields with thespecified RMSE (i.e., standard deviation) values. These syn-thetic errors are spatially uncorrelated. Note that errors in realsatellite soil moisture retrievals are correlated, and our settingsimplifies the experiment but will make the synthetic observa-tions more informational than real retrievals [30], [41]. Also, theresult obtained from the multiscale assimilation system may bevery similar to that using covariance localization and sequentiallocal updates [29], [30].
For the spatial availability factor, we relate the missing frac-tion of retrieved soil moisture to the vegetation optical thick-ness. The vegetation water content (VWC) map for the basincan be found in Fig. 1 (the shading is in log scale). VWC pa-rameter directly translates to the optical depth (“opaqueness”)of the vegetation cover, and is the best measure of how muchof the soil-related microwave emission would be blocked andhow much vegetation-related emissions would add to the soilsignals. Soil moisture retrievals are considered unreliable when
Fig. 2. Cumulative distribution function (CDF) of mean vegetation water con-tent (VWC, solid line) and leaf area index (LAI, dashed line) in July and August,computed as the fraction of total basin area. On the VWC curve, the VWC valuescorresponding to fractions 0.2, 0.4, 0.6, and 0.8 are: 0.43 kg�m , 0.78 kg�m ,1.74 kg�m , and 11.08 kg�m (crosses on the �-axis).
Fig. 3. Open-loop RMSE in top layer soil moisture (basin average � �����).
the vegetation cover is above certain threshold VWCs. For ex-ample, the threshold of 1 kg m is suggested in [13] for satellitesensors at the 10.65 GHz frequency. In our sensitivity analysis,we test a series of different thresholds. The cumulative distri-bution function (CDF) of VWC values in the basin is drawn inFig. 2, along with the Leaf Area Index (LAI) parameter. FromFig. 2, the VWC thresholds corresponding to 0.2, 0.4, and 0.8fractions of the basin (corresponding to 80%, 60%, 40%, and20% missing retrieval fractions) are found to be 0.43 kg m ,0.78 kg m , 1.74 kg m , and 11.08 kg m . These four thresh-olds/missing retrieval fractions and the 100% retrieval scenarioare tested.
For the satellite revisit time factor, four overpass time inter-vals are tested: 6-hourly, 12-hourly, 24-hourly, and 48-hourly.The sensitivity test is conducted in this 3-D parameter spacewith .
The twin experiment is performed as follows. First, a “ref-erence” VIC simulation is carried out to provide an equivalent“truth” state. This simulation is forced with the best rainfall

PAN AND WOOD: IMPACT OF ACCURACY, SPATIAL AVAILABILITY, AND REVISIT TIME OF SATELLITE-DERIVED SURFACE SOIL MOISTURE 53
Fig. 4. Assimilation improvements in top layer volumetric soil moisture estimates (%) against the open-loop simulation for different experiment settings. Panelsin the same row share the same fraction of missing observations (0%, 20%, 40%, 60%, and 80%, respectively); and panels in the same column share the samelevel of observation errors (standard deviation 3%, 4%, 5%, 6%, respectively). Satellite revisit time is once per 24 h (i.e., daily) for all panels. Basin averagedassimilation improvements are labeled within each panel.
measurements available – in this case, the NLDAS-1 precipita-tion [38]. We do not perturb the NLDAS-1 rainfall to create thenoisy rainfall inputs to force the assimilation experiments, andinstead they are directly from the TRMM-3B42RT products.This set-up is similar to [30]. Some researchers may call thisa nonidentical twin experiment, so as to distinguish it from thestandard identical twin experiment, e.g., the one in [19], wherethe noisy rainfalls are synthetically generated and soil moistureerrors are computed against an assumed “truth”. In any case, thekey point here is that our experiment tries to test the ability ofthe assimilation system to correct errors in models forced withreal remote sensing inputs. It is also worth noticing that our “ref-erence” land states are still created by a same model (i.e., syn-thetic), and this tends to overestimate the improvements real-ized through data assimilation [42]. Random noise at differentRMSE levels is added to the generated reference soil mois-ture state to create synthetic soil moisture observations at dif-ferent missing retrieval fractions and overpass times. Then the4 5 4 assimilation experiments are performed. Finally, anopen-loop simulation is carried out to provide the baseline per-formance measure.
In each experiment (including the reference run), the VICmodel is first run through a spin-up period from January 1 toMay 31, 2004 forced with the NLDAS-1 precipitation forcing.This minimizes the impact of initial conditions. For the en-semble assimilation experiments, all the ensemble members arerun unconstrained (i.e., no assimilation) from June 1 to June30, 2004, as an ensemble spin-up to achieve a stable ensemblespread. Observations are assimilated from July 1 to August 31,
2004. To evaluate the assimilation performance, we compute theRMSE in the top layer soil moisture against the reference run.We define the “assimilation improvement” as the difference be-tween the RMSE in the open-loop simulation (Fig. 3) and thatin the assimilation experiment.
Current microwave missions (like TMI or AMSR-E) willoverpass the same point on Earth at least once per day, so weconsider the daily (24-hourly) overpass as a standard configu-ration. Under this setting, Fig. 4 shows the maps of assimilationimprovements with respect to different retrieval accuracy levelsand different missing retrievals. A quick examination of all5 4 panels in Fig. 4 reveals a general trend that the smallerobservation errors and lower missing retrieval fractions leadto higher improvements. In Fig. 4, the difference among thepanels within the same row is not significant compared to thedifferences within the same column, i.e., the assimilation ismuch more sensitive to the spatial retrieval availability ratherthan the retrieval accuracy. The areas of high improvementsare strongly related to the area of available retrievals. As themissing retrieval fraction increases, the heavily vegetatedeastern portion of the basin (Fig. 1) gradually diminishes anygain from assimilating soil moisture. Also, the spatial vari-ability of the improvement from assimilating soil moisture isquite high. Even in the panel with the highest missing retrievalfraction (80%) and poorest accuracy (observation error 6%),some significant improvement can be found in the middle andmid-western part of the basin (bottom right panel in Fig. 4).
The multiscale assimilation system is designed to make useof spatial correlation between different areas and extract as

54 IEEE JOURNAL OF SELECTED TOPICS IN APPLIED EARTH OBSERVATIONS AND REMOTE SENSING, VOL. 3, NO. 1, MARCH 2010
Fig. 5. Basin averaged RMSE in top layer soil moisture estimates in all assim-ilation experiments. Experiments with more missing observations are drawn inthinner lines, and the open-loop RMSE (a constant) is drawn as a gray solid lineat the top.
much information as possible from all observations. Accordingto [24], the horizontal correlation of prior soil moisture errors,on average, decays from 1 at zero distance to at about350–400 km distance, and the decay follows approximately anexponential curve. Fig. 4 basically shows that relatively largeerrors do not compromise the performance of the assimilationbecause redundant information from neighboring observationshelps to compensate the low accuracy. But missing observa-tions pose a greater impact, because missing areas are usuallyadjacent to each other and can’t be compensated for sincetheir adjacent pixels are usually also missing. Special cautionis needed here because the synthetic observation errors arespatially uncorrelated, and this setting may artificially make theobservations more informational than real satellite soil mois-ture retrievals since uncorrelated errors essentially average outacross neighbors. So the real advantage of using neighboringobservations may not be as large as shown in these experiments.
This slow degradation of assimilation performance with in-creasing observation errors is not observed in the horizontallyuncoupled experiments conducted in [20], where such degra-dation is reported to be much faster. This suggests that thereis improved value in the soil moisture satellite retrievals whenassimilated in a horizontally coupled assimilation system andthe results from uncoupled experiments need to be re-assessed.Again, this insensitivity is also in part a result of the uncorre-lated errors added.
Fig. 5 gives the basin averaged RMSE values for all 4 5 4experiments. The open-loop simulation has a RMSE of 2.93%,and shown as a gray line in each panel in Fig. 5. The same gen-eral trend of assimilation performance as in Fig. 4 can be ob-served here. In most cases, the RMSE increases with higher ob-servation errors, higher missing retrieval fractions, and longeroverpass intervals. A close examination on Fig. 5 reveals thatthe assimilation is sensitive to revisit time when little data ismissing (see the thickest lines in each panel), and the revisit timeno longer matters when too much data is missing. The perfor-mance is most sensitive to the spatial availability, then to therevisit time, and least to the retrieval accuracy.
There are a few exceptions to the general trend. A significantone is that the RMSE decreases with higher observation errorsunder the 6-hourly and 48-hourly overpass configuration whenthere is 80% missing. This is also unique to the horizontally cou-pled assimilation where areas of missing observations will beupdated by remote observations. When the missing fraction is aslarge as 80%, the optimality of EnMSF is being seriously tested.Both the nonlinear relationship across the domain and spuriouscorrelations in the ensemble can compromise the EnMSF per-formance, which is why large observations errors (i.e., less re-mote update) may actually result in a better performance in thelow spatial availability cases. In all the 4 5 4 assimilationexperiments, only one experiment has a final RMSE worse thanthe open-loop simulation (upper left panel in Fig. 5). This issimilar to what is observed in [20], where an upper bound ofobservation errors (close to model forecast error level) exists toavoid model degradation. In the experiments here, they show abetter tolerance to the retrieval error levels due to a lower sensi-tivity of the multiscale assimilation system to these errors.
In all experiments, the absolute values of soil moistureRMSE’s are quite small: the basin average is around 2%–3%for all experiments (Fig. 5). So are the assimilation improve-ments – basin average below 1%. Even at individual pixels,the improvements hardly exceed 1.5%. Note that this does notmean all the errors or improvements are insignificant. This isprobably the result of specific characteristics of using the VICland surface model as the dynamic model. First, the top layer inthe VIC model only considers gravity drainage between layerswhen it solves the vertical soil moisture fluxes. This modelphysics makes it harder to dry down the top layer to a very lowmagnitude due to low unsaturated hydraulic conductivity of drysoils. Consequently, the dynamic range of VIC soil moistureis relatively small. According to [15], VIC 10 cm top layerhas a dynamic range about half of the satellite top 1 cm soilmoisture retrievals. Second, our experiment only covers a fewmonths in the relatively wet 2004 summer; thus, all the tests aremostly limited to the high end of soil moisture climatology. Inshort, the soil moisture RMSE and assimilation improvementobtained here are all relative to the VIC model’s own dynamicsduring the study period, and they should be rescaled by a factorof 1.5–2 when comparison is made against remotely sensedsurface soil moisture.
Since the absolute values of RMSE’s or assimilation im-provements may not serve as a good measure of assimilationeffectiveness, the basin averaged “relative” assimilation im-provements are also calculated, simply as the original RMSEimprovement normalized by the open-loop RMSE (Fig. 3).With this normalization, basin averaged relative improvementcan be as high as 30%, which is a very significant improvement,and the relative improvement over some individual pixels canexceed 60%.
IV. CONCLUSION
We perform a series of horizontally coupled assimilation ex-periments to test the sensitivity of a multiscale ensemble dataassimilation system, when forced with satellite rainfall inputs,to the quality of soil moisture observations. The sensitivity istested in three dimensions: retrieval accuracy, spatial availability

PAN AND WOOD: IMPACT OF ACCURACY, SPATIAL AVAILABILITY, AND REVISIT TIME OF SATELLITE-DERIVED SURFACE SOIL MOISTURE 55
of the retrievals, and satellite revisit time. Findings from thesecoupled assimilation experiments show a similar general trendof assimilation performance against retrieval accuracy to whatwas reported in [20] where horizontally uncoupled experimentsare performed using an EKF. However, the multiscale assim-ilation experiments show a higher resilience to low observa-tion accuracy than the uncoupled EKF experiments, becausethe horizontally coupled system makes use of observations overthe entire region and, thus, extracts more information than doesthe horizontally uncoupled system. A special note is that be-cause spatially uncorrelated observation errors are used, ourexperiments will show larger assimilation improvements thanwhat can be achieved with real satellite data. Nevertheless, thisfinding does suggest that the satellite soil moisture observationsmay contain more information than what is believed as longas it can be fully utilized. It also confirms the most importantadvantage of horizontally coupled assimilation techniques, in-cluding the multiscale techniques [25] and others like singularvalue decomposition [27] and covariance localization with se-quential updates [29], [30], and the need to use them when as-similating satellite observations into land surface models.
While we deploy a very efficient multiscale assimilationscheme, the computational cost of horizontally coupled exper-iments is still higher than the uncoupled ones. Our sensitivitytests are limited to one mid-size river basin for one summeras opposed to a full continent domain for one year as in [20].Also, we tested a smaller range of parameters. To maximize theapplicability of the conclusions drawn here, the study region iscarefully chosen such that it represents a wide variety of landcovers, and the range of parameters is selected to representcurrent/near future sensors. Nonetheless, experiments withmuch longer period and larger domains are possible and highlydesirable. Also, we plan to expand these experiments usinga variety of satellite products to obtain broader conclusionsabout satellite and retrieval characteristics and their impact onregional water cycle variables.
REFERENCES
[1] J. D. Albertson and M. B. Parlange, “Natural integration of scalar fluxesfrom complex terrain,” Adv. Water Res., vol. 23, pp. 239–252, Nov.1999.
[2] A. T. Cahill, M. B. Parlange, T. J. Jackson, P. O’Neill, and T. J.Schmugge, “Evaporation from nonvegetated surfaces: Surface ariditymethods and passive microwave remote sensing,” J. Appl. Meteorol.,vol. 38, pp. 1346–1351, Sep. 1999.
[3] D. Entekhabi, E. G. Njoku, P. Houser, M. Spencer, T. Doiron, Y. J.Kim, J. Smith, R. Girard, S. Belair, W. Crow, T. J. Jackson, Y. H. Kerr,J. S. Kimball, R. Koster, K. C. McDonald, P. E. O’Neill, T. Pultz, S.W. Running, J. C. Shi, E. Wood, and J. van Zyl, “The hydrospherestate (Hydros) satellite mission: An earth system pathfinder for globalmapping of soil moisture and land freeze/thaw,” IEEE Trans. Geosci.Remote Sens., vol. 42, no. 10, pp. 2184–2195, Oct. 2004.
[4] R. D. Koster, M. J. Suarez, and M. Heiser, “Variance and predictabilityof precipitation at seasonal-to-interannual timescales,” J. Hydromete-orol., vol. 1, pp. 26–46, Feb. 2000.
[5] H. B. Li, L. F. Luo, E. F. Wood, and J. Schaake, “The role of initial con-ditions and forcing uncertainties in seasonal hydrologic forecasting,” J.Geophys. Res., Atmos., vol. 114, Feb. 2009.
[6] A. Robock, K. Y. Vinnikov, G. Srinivasan, J. K. Entin, S. E. Hollinger,N. A. Speranskaya, S. X. Liu, and A. Namkhai, “The global soil mois-ture data bank,” Bull. Amer. Meteorol. Soc., vol. 81, pp. 1281–1299,Jun. 2000.
[7] J. C. Schaake, Q. Y. Duan, V. Koren, K. E. Mitchell, P. R. Houser, E.F. Wood, A. Robock, D. P. Lettenmaier, D. Lohmann, B. Cosgrove, J.Sheffield, L. F. Luo, R. W. Higgins, R. T. Pinker, and J. D. Tarpley, “Anintercomparison of soil moisture fields in the North American land dataassimilation system (NLDAS),” J. Geophys. Res., Atmos., vol. 109, Jan.2004.
[8] H. B. Li, A. Robock, and M. Wild, “Evaluation of intergovernmentalpanel on climate change fourth assessment soil moisture simulationsfor the second half of the twentieth century,” J. Geophys. Res., Atmos.,vol. 112, Mar. 2007.
[9] M. Drusch, “Initializing numerical weather prediction models withsatellite-derived surface soil moisture: Data assimilation experimentswith ECMWF’s integrated forecast system and the TMI soil moisturedata set,” J. Geophys. Res., Atmos., vol. 112, Feb. 2007.
[10] R. H. Reichle and R. D. Koster, “Global assimilation of satellite surfacesoil moisture retrievals into the NASA Catchment land surface model,”Geophys. Res. Lett., vol. 32, Jan. 2005.
[11] R. H. Reichle, R. D. Koster, P. Liu, S. P. P. Mahanama, E. G. Njoku,and M. Owe, “Comparison and assimilation of global soil moistureretrievals from the advanced microwave scanning radiometer for theearth observing system (AMSR-E) and the scanning multichannel mi-crowave radiometer (SMMR),” J. Geophys. Res., Atmos., vol. 112, May2007.
[12] Z. Bartalis, W. Wagner, V. Naeimi, S. Hasenauer, K. Scipal, H.Bonekamp, J. Figa, and C. Anderson, “Initial soil moisture retrievalsfrom the METOP-A advanced scatterometer (ASCAT),” Geophys.Res. Lett., vol. 34, Oct. 2007.
[13] H. Gao, E. F. Wood, T. J. Jackson, M. Drusch, and R. Bindlish, “UsingTRMM/TMI to retrieve surface soil moisture over the Southern UnitedStates from 1998 to 2002,” J. Hydrometeorol., vol. 7, pp. 23–38, Feb.2006.
[14] R. A. M. de Jeu, W. Wagner, T. R. H. Holmes, A. J. Dolman, N. C.van de Giesen, and J. Friesen, “Global soil moisture patterns observedby space borne microwave radiometers and scatterometers,” Surv. Geo-phys., vol. 29, pp. 399–420, Oct. 2008.
[15] H. L. Gao, E. F. Wood, M. Drusch, and M. F. McCabe, “Copula-derived observation operators for assimilating TMI and AMSR-E re-trieved soil moisture into land surface models,” J. Hydrometeorol., vol.8, pp. 413–429, Jun. 2007.
[16] W. T. Crow and E. F. Wood, “The assimilation of remotely sensed soilbrightness temperature imagery into a land surface model using es-emble Kalman filtering: A case study based on ESTAR measurementsduring SGP97,” Adv. Water Res., vol. 26, pp. 137–149, Feb. 2003.
[17] D. McLaughlin, “An integrated approach to hydrologic data assimila-tion: Interpolation, smoothing, and filtering,” Adv. Water Res., vol. 25,pp. 1275–1286, Aug.-Dec. 2002.
[18] R. H. Reichle, D. B. McLaughlin, and D. Entekhabi, “Variational dataassimilation of microwave radiobrightness observations for land sur-face hydrology applications,” IEEE Trans. Geosci. Remote Sens., vol.39, no. 8, pp. 1708–1718, Aug. 2001.
[19] R. H. Reichle, D. B. McLaughlin, and D. Entekhabi, “Hydrologic dataassimilation with the ensemble Kalman filter,” Month. Weather Rev.,vol. 130, pp. 103–114, 2002.
[20] J. P. Walker and P. R. Houser, “Requirements of a global near-surfacesoil moisture satellite mission: Accuracy, repeat time, and spatial res-olution,” Adv. Water Res., vol. 27, pp. 785–801, Aug. 2004.
[21] R. H. Reichle, W. T. Crow, R. D. Koster, H. O. Sharif, and S. P. P.Mahanama, “Contribution of soil moisture retrievals to land data as-similation products,” Geophys. Res. Lett., vol. 35, Jan. 2008.
[22] Y. H. Kerr, J. Font, P. Waldteufel, and M. Berger, “The second of ESA’sopportunity missions: The soil moisture and ocean salinity mission –SMOS,” ESA Earth Obs. Quart., vol. 66, 2000.
[23] E. G. Njoku, D. Entekhabi, and P. O’Neill, “Soil moisture active andpassive (SMAP) mission,” presented at the AMSR-E Science TeamMeet., Telluride, CO, 2008.
[24] M. Pan and E. F. Wood, “A multiscale ensemble filtering system forhydrologic data assimilation. Part II: Application to land surface mod-eling with satellite rainfall forcing,” J. Hydrometeorol., vol. 10, pp.1493–1506, Dec. 2009.
[25] M. Pan, E. F. Wood, D. B. McLaughlin, D. Entekhabi, and L. F. Luo, “Amultiscale ensemble filtering system for hydrologic data assimilation.Part I: Implementation and synthetic experiment,” J. Hydrometeorol.,vol. 10, pp. 794–806, Jun. 2009.
[26] Y. H. Zhou, D. McLaughlin, D. Entekhabi, and G. H. C. Ng, “An en-semble multiscale filter for large nonlinear data assimilation problems,”Month. Weather Rev., vol. 136, pp. 678–698, Feb. 2008.

56 IEEE JOURNAL OF SELECTED TOPICS IN APPLIED EARTH OBSERVATIONS AND REMOTE SENSING, VOL. 3, NO. 1, MARCH 2010
[27] G. Evensen, “Sampling strategies and square root analysis schemes forthe EnKF,” Ocean Dyn., vol. 54, pp. 539–560, Dec. 2004.
[28] T. M. Hamill, J. S. Whitaker, and C. Snyder, “Distance-dependentfiltering of background error covariance estimates in an ensembleKalman filter,” Month. Weather Rev., vol. 129, pp. 2776–2790, 2001.
[29] P. L. Houtekamer and H. L. Mitchell, “A sequential ensemble Kalmanfilter for atmospheric data assimilation,” Month. Weather Rev., vol. 129,pp. 123–137, 2001.
[30] R. H. Reichle and R. D. Koster, “Assessing the impact of horizontalerror correlations in background fields on soil moisture estimation,” J.Hydrometeorol., vol. 4, pp. 1229–1242, Dec. 2003.
[31] A. S. Willsky, “Multiresolution Markov models for signal and imageprocessing,” Proc. IEEE, vol. 90, no. 8, pp. 1396–1458, Aug. 2002.
[32] A. B. Frakt and A. S. Willsky, “Computationally efficient stochastic re-alization for internal multiscale autoregressive models,” Multidim. Syst.Signal Process., vol. 12, pp. 109–142, Apr. 2001.
[33] Y. H. Zhou, “Multisensor large scale land surface data assimilationusing ensemble approaches,” in Civil Environmental Engineering.Cambridge, MA: Massachusetts Institute of Technology, 2006, p. 234.
[34] X. Liang, D. P. Lettenmaier, E. F. Wood, and S. J. Burges, “A simplehydrologically based model of land-surface water and energy fluxesfor general-circulation models,” J. Geophys. Res., Atmos., vol. 99, pp.14415–14428, Jul. 1994.
[35] X. Liang, E. F. Wood, and D. P. Lettenmaier, “Surface soil moistureparameterization of the VIC-2L model: Evaluation and modification,”Global Planetary Change, vol. 13, pp. 195–206, Jun. 1996.
[36] E. P. Maurer, A. W. Wood, J. C. Adam, D. P. Lettenmaier, and B. Ni-jssen, “A long-term hydrologically based dataset of land surface fluxesand states for the conterminous United States,” J. Climate, vol. 15, pp.3237–3251, Nov. 2002.
[37] K. E. Mitchell, D. Lohmann, P. R. Houser, E. F. Wood, J. C. Schaake,A. Robock, B. A. Cosgrove, J. Sheffield, Q. Y. Duan, L. F. Luo, R. W.Higgins, R. T. Pinker, J. D. Tarpley, D. P. Lettenmaier, C. H. Marshall,J. K. Entin, M. Pan, W. Shi, V. Koren, J. Meng, B. H. Ramsay, and A.A. Bailey, “The multi-institution North American land data assimila-tion system (NLDAS): Utilizing multiple GCIP products and partnersin a continental distributed hydrological modeling system,” J. Geophys.Res., Atmos., vol. 109, Apr. 2004.
[38] B. A. Cosgrove, D. Lohmann, K. E. Mitchell, P. R. Houser, E. F. Wood,J. C. Schaake, A. Robock, C. Marshall, J. Sheffield, Q. Y. Duan, L. F.Luo, R. W. Higgins, R. T. Pinker, J. D. Tarpley, and J. Meng, “Real-time and retrospective forcing in the North American Land Data As-similation System (NLDAS) project,” J. Geophys. Res., Atmos., vol.108, Oct. 2003.
[39] G. J. Huffman, R. F. Adler, D. T. Bolvin, G. J. Gu, E. J. Nelkin, K.P. Bowman, Y. Hong, E. F. Stocker, and D. B. Wolff, “The TRMMmultisatellite precipitation analysis (TMPA): Quasi-global, multiyear,combined-sensor precipitation estimates at fine scales,” J. Hydromete-orol., vol. 8, pp. 38–55, Feb. 2007.
[40] B. Cosgrove, Forcing Files for NLDAS Phase 2 (NLDAS-2) 2007[Online]. Available: http://ldas.gsfc.nasa.gov/LDAS8th/LDAS-docs/nldas2forcing.pdf
[41] M. Pan and E. Wood, “Impact of horizontal coupling in data assimi-lation and a multiscale approach for assimilating soil moisture,” pre-sented at the AGU Fall Meet. San Francisco, CA, 2008.
[42] S. Kumar, M. Sekhar, and S. Bandyopadhyay, “Assimilation of remotesensing and hydrological data using adaptive filtering techniques forwatershed modelling,” Curr. Sci., vol. 97, pp. 1196–1202, Oct. 2009.
Ming Pan received the B.E. degree in hydraulic engi-neering from Tsinghua University, Beijing, China, in2000, and the M.A. and Ph.D. degrees in civil and en-vironmental engineering from Princeton University,Princeton, NJ, in 2002 and 2006, respecitvely.
He performed postdoctoral research in the area ofdata assimilation at Princeton University and Massa-chusetts Institute of Technology from 2006 to 2007.He is currently an Associate Research Scientist in theDepartment of Civil and Environmental Engineering,Princeton University.
Dr. Pan is a member of the American Geophysical Union and American Me-teorological Society.
Eric F. Wood received the B.A.Sc. degree in civilengineering from the University of British Columbia,Vancouver, BC, Canada, in 1970, and the M.S., C.E.and D.Sc. degrees in civil engineering from theMassachusetts Institute of Technology, Cambridge,in 1972, 1973, and 1974, respectively.
He is currently a Professor in the Departmentof Civil and Environmental Engineering, PrincetonUniversity, Princeton, NJ. His recent contributionsinclude: 1) macroscale hydrologic prediction ofthe coupled water and energy balances of the land
surface, 2) remote sensing as an integral tool for observation and modeling ofthe hydrologic cycle, and 3) developing and evaluating seasonal hydrologicalforecasts based on coupled seasonal climate forecasts.
Dr. Wood is a fellow of the American Geophysical Union and the AmericanMeteorological Society. He has received, among other honors, the Robert E.Horton Award from the Hydrology Section of the American Geophysical Union(1977), the John Dalton Medal from the European Geophysical Union (2007)and the Jules G. Charney Award from the American Meteorological Society(2010).