[IEEE 2013 International Symposium on Ocean Electronics (SYMPOL) - Kochi, India...
8
66 Mid-to-High-Fr Bottom Los Naval Physica Abstract—Bottom Lo India are presented as (4 0 – 16 0 ). The sedime provide accurate resul frequencies. For imp underlying a water lay Bottom loss values est well with the observati Index Terms—Geo-ac 1. Introduction The geo-acoustic parame play an important role in det water sound propagation a characteristics. Sediment properties can be extracte reflection loss measuremen difficult to carry out measurements. Several stu conducted to understand between sound and the sea bo reported experiments were a (<1 kHz) where consider acoustic energy penetrates in 2]. Interpretation of bo measurements becomes com bottom properties vary as a fu is the case with a transition bottom properties vary line Analytic solutions have been reflection of plane acous horizontally stratified fluid varying density and sound spe PROCEEDINGS requency Geo-acoustic Inversion ss Data off the West Coast of Ind Sreeram Radhakrishnan al & Oceanographic Laboratory. Kochi 682021, India [email protected] oss measurements at a shallow water site off the west a function of frequency (5-15 kHz) and seabed grazi ent layer modelled as a homogeneous fluid half-space lts for grazing angles above 10 degrees especially a proved modelling of bottom loss, a two-layered s yer along with a set of geo-acoustic parameters is con timated from the best-fit geo-acoustic model agree re ions of bottom loss over the entire frequency range. coustic Inversion, Bottom Loss, Shallow water eters of sediments termining shallow and reverberation t geo-acoustic ed from bottom nts where it is direct in situ udies have been the interaction ottom. Most of the at low frequencies rable amount of nto the bottom [1, ottom reflection mplicated if the unction of depth as n layer where the early with depth. n derived for the tic waves from layer for linearly eed [3-6]. Some of the previous studi estimating sediment propert transition layer, i.e., to inver gradient or attenuation with Spofford [7] introduced a techn the sound speed gradient using loss data between 50-1600 Hz [8] obtained density and sound in the transition layer by a Bay approach between 300-1600 Hz [9] presented bottom-loss meas in the East China Sea as frequency (2-20 kHz) and grazi 15-24 0 ). They found reasonable a reflection coefficient model b layered sediment for which the the surficial transition layer is as a linear k 2 profile (square number varies linearly with de help of mid-to-high frequ measurements, they could clea a strong variation in bottom lo of grazing angle at 4 and 8 kH variation at 2, 16 and 20 kHz an OF SYMPOL 2013 n using dia a t coast of ing angle e fails to at higher sediment nsidered. asonably ies focussed on ties within a rt sound speed hin this layer. nique to estimate acoustic bottom . Holland et al. speed gradients yesian inversion z. Choi and Dahl surements made a function of ing angle (range agreement with based on a two- sound speed in allowed to vary e of the wave epth). With the uency acoustic arly demonstrate ss as a function Hz and minimal nd related that to
Transcript of [IEEE 2013 International Symposium on Ocean Electronics (SYMPOL) - Kochi, India...
![Page 1: [IEEE 2013 International Symposium on Ocean Electronics (SYMPOL) - Kochi, India (2013.10.23-2013.10.25)] 2013 Ocean Electronics (SYMPOL) - Mid-to-high-frequency geo-acoustic inversion](https://reader042.fdocuments.in/reader042/viewer/2022021920/5750a6781a28abcf0cb9d0b2/html5/page/1.jpg)
66
Mid-to-High-Fr
Bottom Los
Naval Physica
Abstract—Bottom LoIndia are presented as (40 – 160). The sedimeprovide accurate resulfrequencies. For impunderlying a water layBottom loss values estwell with the observati
Index Terms—Geo-ac
1. Introduction
The geo-acoustic parameplay an important role in detwater sound propagation acharacteristics. Sedimentproperties can be extractereflection loss measuremendifficult to carry out measurements. Several stuconducted to understand between sound and the sea boreported experiments were a(<1 kHz) where consideracoustic energy penetrates in2]. Interpretation of bomeasurements becomes combottom properties vary as a fuis the case with a transitionbottom properties vary lineAnalytic solutions have beenreflection of plane acoushorizontally stratified fluid varying density and sound spe
PROCEEDINGS
requency Geo-acoustic Inversionss Data off the West Coast of Ind
Sreeram Radhakrishnan
al & Oceanographic Laboratory. Kochi 682021, [email protected]
oss measurements at a shallow water site off the westa function of frequency (5-15 kHz) and seabed grazi
ent layer modelled as a homogeneous fluid half-spacelts for grazing angles above 10 degrees especially a
proved modelling of bottom loss, a two-layered syer along with a set of geo-acoustic parameters is contimated from the best-fit geo-acoustic model agree reions of bottom loss over the entire frequency range.
coustic Inversion, Bottom Loss, Shallow water
eters of sediments termining shallow and reverberation t geo-acoustic ed from bottom nts where it is
direct in situ udies have been
the interaction ottom. Most of the at low frequencies rable amount of nto the bottom [1, ottom reflection mplicated if the
unction of depth as n layer where the early with depth. n derived for the tic waves from layer for linearly eed [3-6].
Some of the previous studiestimating sediment properttransition layer, i.e., to invergradient or attenuation withSpofford [7] introduced a technthe sound speed gradient using loss data between 50-1600 Hz[8] obtained density and sound in the transition layer by a Bayapproach between 300-1600 Hz[9] presented bottom-loss measin the East China Sea as frequency (2-20 kHz) and grazi15-240). They found reasonable a reflection coefficient model blayered sediment for which the the surficial transition layer is as a linear k2 profile (squarenumber varies linearly with dehelp of mid-to-high frequmeasurements, they could cleaa strong variation in bottom loof grazing angle at 4 and 8 kHvariation at 2, 16 and 20 kHz an
OF SYMPOL 2013
n using dia
a
t coast of ing angle e fails to at higher sediment nsidered. asonably
ies focussed on ties within a rt sound speed hin this layer. nique to estimate
acoustic bottom . Holland et al. speed gradients
yesian inversion z. Choi and Dahl surements made a function of
ing angle (range agreement with
based on a two-sound speed in
allowed to vary e of the wave epth). With the
uency acoustic arly demonstrate ss as a function
Hz and minimal nd related that to
![Page 2: [IEEE 2013 International Symposium on Ocean Electronics (SYMPOL) - Kochi, India (2013.10.23-2013.10.25)] 2013 Ocean Electronics (SYMPOL) - Mid-to-high-frequency geo-acoustic inversion](https://reader042.fdocuments.in/reader042/viewer/2022021920/5750a6781a28abcf0cb9d0b2/html5/page/2.jpg)
Sreeram Radhakrishnan: Geo-acoustic inversion using bottom loss data 67
Ο (1 m) - thick layered structure in the near-surface sediment. Recently, Yang et al. [10] studied geo-acoustic inversion using bottom loss data and demonstrated that forward scattering from topographic changes is important at mid-frequencies (2-5 kHz) as compared to sediment density and sound speed parameters.
This paper presents bottom loss measurements made at a shallow water location off the west coast of India in the frequency band of 5-15 kHz for seabed grazing angles ranging from 4-160. Bottom loss is estimated from channel impulse response measurements. Matched filtering technique is utilized to identify the direct and bottom path arrivals and determine the bottom reflection coefficient. Measurements are interpreted as estimates of the modulus of the plane wave reflection coefficient. The observed bottom loss is compared to -20log|R|, where |R| is the modulus of the plane wave reflection coefficient.
Following the development in [9], a two-layered sediment underlying a water layer along with a set of geo-acoustic parameters is considered and the plane wave reflection coefficient associated with it is calculated. An optimum set of geo-acoustic model parameters is identified from an exhaustive search over a constrained parameter space based on a weighted least-squared error criterion. The compressive wave speed in the first sediment layer is expected to be in the range of 1550-1620 m/s. The sea water sound speed near the bottom was measured to be 1541.5 m/s. Hence, the critical angle is expected to vary from 11-210. The measurements were carried out up to a seabed grazing angle of 16 0.
This paper is organized as follows. Acoustic field measurements with experimental details and environmental conditions are given in Section 2. Experimental results are compared to bottom loss obtained from a homogeneous fluid half-space model. In Section 3, we introduce the bottom-reflection
model based on a two-layered fluid sediment. This model is used in forward calculations of the reflection coefficient, which in turn are used in Section 4 in an exhaustive search for geo-acoustic parameters that minimize error between modeled and measured bottom loss. A summary and the concluding remarks are given in Section 5.
2. Measurements of Bottom Loss
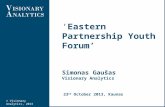
Experimental measurements were made off the west coast of India to study acoustic propagation characteristics in a shallow water environment. Figure 1 shows the schematic of the experiment. The water depth was measured to be 64m and found to be nearly constant along the experimental track.
Fig. 1:. Schematic of the experiment showing source –receiver geometry.
A broadband projector Geospectrum Transducers Inc. M18-C6 was used for transmitting broadband LFM pulses. It has a peak transmitting voltage response of 147.4 dB re 1μPa/ V at 1m at a frequency of 11.5 kHz. The transmitter was omni-directional over the angular range used in the measurements. B & K 8105 hydrophone was deployed during the experiments to receive acoustical signals. The hydrophone consists of an omni-directional element of sensitivity -195.4 dB re 1μPa/ V.
Broadband LFM pulses (5-15 kHz) with a length of 100 ms were transmitted for different source receiver configurations. Four sets of measurements with bottom-grazing angles ranging from 40 – 160 were realized by carrying
![Page 3: [IEEE 2013 International Symposium on Ocean Electronics (SYMPOL) - Kochi, India (2013.10.23-2013.10.25)] 2013 Ocean Electronics (SYMPOL) - Mid-to-high-frequency geo-acoustic inversion](https://reader042.fdocuments.in/reader042/viewer/2022021920/5750a6781a28abcf0cb9d0b2/html5/page/3.jpg)
68 PROCEEDINGS OF SYMPOL 2013
out measurements at two source depths (11m and 41m) and one receiver depth (25m). Details of the source-receiver configurations are provided in Table 1. For each of the configurations 15 pulses were transmitted with a repetition interval of 3 seconds. The hydrophone and projector depths were monitored by depth sensors. The source-receiver ranges as determined from GPS data varied from 300 to 900 m. The accuracy of GPS data is within 10m.
Table 1. Source Receiver geometry and the realized bottom grazing angles
Configuration I II III
Range (m) 320 300 910
Source Depth (m) 11 41 11
Receiver Depth (m) 25 26 25
Grazing angle (deg.) 16 10.8 5.4 The reflection loss in the specular direction
is the difference, in decibels, between the intensities of the incident and reflected waves. Spreading and absorption loss corrections need to be incorporated to compensate for the direct and bottom reflected paths between the projector and hydrophone obtained from measured data. For these source-receiver configurations, the difference in spreading and absorption loss between the direct path and the bottom path are negligible. Absorption loss was predicted using temperature and salinity measured by CTD casts during the experiment. In the frequency band of 5-15 kHz, absorption loss is of the order of 1 dB/km [11]. The top-to-bottom sound speed variability was observed to be less than 5 m/s. As a result, the overall difference in attenuation between the direct and bottom paths due to spreading and absorption was found to be 0.36 dB for a grazing angle of ~16 0 and 0.18 dB for ~10.8 0. Furthermore, the difference was found to be negligible for lower grazing angles. The values of measured
bottom loss in terms of mean and variance are listed in Table 2.
Table 2. Measured Bottom Loss (dB) in terms Mean and variance at 6, 8, 10 and 12 kHz
Measured Bottom
Loss (dB) Mean and Variance
Grazing Angle (degrees)
5.4 10.8 16.0
6 kHz 1.485 2.61 1.998 0.054 0.237 0.026
8 kHz 1.654 3.23 2.4 0.071 0.43 0.089
10 kHz 1.762 2.433 2.196 0.069 0.184 0.115
12 kHz 1.775 3.072 2.239 0.073 0.241 0.135
3. Modelling of Bottom Loss
To put things in perspective, first we compare the measurements of bottom loss to a homogeneous fluid half-space model. The sediment layer was found to be consisting mainly of sand with a density of 1.97 g/cm3. The compressional and shear wave speeds are taken as 1617 m/s and 357 m/s respectively [12]. The compressional and shear wave attenuation values used in the homogeneous half-space model are 0.658 dB/m/kHz and 13.2 dB/m/kHz respectively. The half-space model fails to predict the variation with increasing grazing angle beyond 10 degrees. A forward model for the reflection coefficient consisting of a water layer overlying a 2-layered fluid sediment is considered to incorporate frequency and angle dependence in estimates of bottom loss. The expression for reflection coefficient [13] can be written as
2321
21232312
1)1()1(
RRRRRR
R−
+++= (1)
where Rij is the reflection coefficient at boundary ij and subscripts 1-3 indicate water, finite-depth layer and half-space respectively (Figure 2). The finite-depth layer of thickness L
![Page 4: [IEEE 2013 International Symposium on Ocean Electronics (SYMPOL) - Kochi, India (2013.10.23-2013.10.25)] 2013 Ocean Electronics (SYMPOL) - Mid-to-high-frequency geo-acoustic inversion](https://reader042.fdocuments.in/reader042/viewer/2022021920/5750a6781a28abcf0cb9d0b2/html5/page/4.jpg)
Sreeram Radhakrishnan: Geo-acoustic inversion using bottom loss data 69
is allowed to have some positive sound speed gradient which is consistent with the presence of sandy sediments.
Fig. 2: Schematic of a forward model for the reflection coefficient consisting of a water layer overlying a 2-layered fluid sediment.
In this layer, the sound speed is allowed to vary as a linear k2 profile, where k is acoustic wave number. The linear k2 sound speed profile governing the reflection coefficient model is given by
)0(21
)(1
22
22 c
zzc
β−= (2)
where β is the gradient of sound speed. Equation (2) can be approximated as follows:
2/1
222 )0(
21)0()(−
⎟⎟⎠
⎞⎜⎜⎝
⎛−=
czczc β (3)
For 1)0(2
<<c
zβ (4)
The sound speed profile becomes
zczc β+= )0()( 22 (5)
The region below this layer is modeled as a half-space with constant density and sound speed.
Given the 5–15 kHz frequency range and ≤ 200 grazing angle range, moderate sediment attenuation renders our measurements meaningful to sediment properties not greater than a few centimeters in depth. Hence, we first aim to invert for sound speed in the half-space layer. The thickness L is assumed to be of the order of 10 cm. At 6 kHz and above, kL in the sediment layer is greater than or equal to 2. Robins [4] suggests that density gradients have very little influence on bottom loss for kL ≥ 2. Hence, density values are assumed to be constant in both the sediment layers. The compressive sediment attenuation values are also assumed to be constant in layers 2 and 3. Sediment attenuation is included by making the sound speed complex in the manner used in [14]. We believe that such a model for the bottom-reflection coefficient roughly matches the inherent resolving capability of the measurements. Measurements made at 6, 8, 10 and 12 kHz clearly exhibit oscillations as a function of grazing angle that can only be realized with a model that includes some kind of layered structure in the upper sediments.
Here, a model formulated by Ainslie [3] is implemented which incorporates the plane wave reflection coefficient. The formulation provides analytic solutions of the depth-dependent Helmholtz equation for specific canonical gradients. He imposes the boundary condition that the pressure and normal component of particle velocity are continuous across a given boundary to get the reflection coefficient for each layer. At the water-sediment layer interface, applying the continuity of pressure and normal component of water particle velocity we get,
)0(1 21212 ==+ + zPTR (6)
( )zzPTRi
∂=∂=−
+ )0(1 2
2
1212
1
1
ρργ (7)
![Page 5: [IEEE 2013 International Symposium on Ocean Electronics (SYMPOL) - Kochi, India (2013.10.23-2013.10.25)] 2013 Ocean Electronics (SYMPOL) - Mid-to-high-frequency geo-acoustic inversion](https://reader042.fdocuments.in/reader042/viewer/2022021920/5750a6781a28abcf0cb9d0b2/html5/page/5.jpg)
70 PROCEEDINGS OF SYMPOL 2013
where Tij is the transmission coefficient at boundary ij and ρi and γi are sediment density and vertical wave number in layer i, respectively.
)(2 zP+ and )(2 zP− represent the down and up-travelling pressure fields in the sediment layer.
Substituting (2) into (3) yields
)0(
)0()0(
)0(
22
2
21
12
22
2
21
12
12
=∂
=∂+
=∂
=∂−
=
+
+
+
+
zPiz
zPzPi
zzP
R
γγργρ
γγργρ
(8)
Also,
21
12
22
2
21
12
22
2
21
)0(
)0()0(
)0(
γργρ
γ
γργρ
γ
+=
∂=∂
−=
∂=∂
=
+
+
−
−
zPiz
zPzPi
zzP
R (9)
Similarly, R23 is given by the following equation,
32
23
22
2
32
23
22
2
2
223
)(
)()(
)(
)()(
γργρ
γ
γργρ
γ
+=
∂=∂
−=
∂=∂
==
=
−
−
+
+
−
+
hzPiz
hzPhzPi
zhzP
hzPhzP
R (10)
It can be shown that when the pressure field is constant with depth, the ratio becomes
1)0(
)0(
22
2
==
∂=∂
±
±
zPiz
zP
γ (11)
As a result, equations (8), (9) and (10) become reflection coefficients for layers of homogeneous fluid media.
4. Inversion Based on a Two-layered Sediment Reflection Model
The reflection coefficient model is driven by eight geo-acoustic parameters and they are listed in Table 3; these are estimated from the data by minimizing the weighted squared error between the data and the model predictions for a candidate set of parameters. The values of used for the sea-water sound speed just above the sediment interface and density are 1541.5 m/s and 1.0 g/cm3.The objective function is written as
Q = (Xi - Mi)T We (Xi - Mi) (12)
where Xi = Measured bottom loss as a function of grazing angle and frequency
Mi = Modelled bottom loss as a function of grazing angle and frequency
We = Diagonal weight matrix composed of 1/σ n 2 where σ n 2 is the measurement variance for the nth bottom loss estimate.
Table 3. Candidate set of Geo-acoustic parameters for the reflection coefficient model
Sediment Parameters Symbol Sound speed at water -sediment layer interface (m/s)
c2 (0)
Sound speed at sediment layer and half-space interface (m/s)
c2 (L)
Sound speed in half-space (m/s) c3 Density in sediment layer (g/cm3) ρ2 Density in half-space (g/cm3) ρ3 Finite layer depth (m) L Compressional wave attenuation in sediment layer (dB/m/kHz)
α2 /f
Compressional wave attenuation in half-space (dB/m/kHz)
α3 /f
![Page 6: [IEEE 2013 International Symposium on Ocean Electronics (SYMPOL) - Kochi, India (2013.10.23-2013.10.25)] 2013 Ocean Electronics (SYMPOL) - Mid-to-high-frequency geo-acoustic inversion](https://reader042.fdocuments.in/reader042/viewer/2022021920/5750a6781a28abcf0cb9d0b2/html5/page/6.jpg)
Sreeram Radhakrishnan: Geo-acoustic inversion using bottom loss data 71
5. Inversion Results
Results of the inversion for the best-fit geo-acoustic parameter set describing a sediment layer and underlying sediment half-space are illustrated in Figure 3. To obtain the best-fit geo-acoustic model, first we define the initial and final search space for the 8 sediment parameters. The details are provided in Table 4. Figure 4 compares the measured bottom loss as a function of grazing angle and frequencies to the homogeneous half-space model and the best-fit geo-acoustic model. It is clearly observed that the half-space model fails to provide accurate results for grazing angles above 10 degrees.
The observed variation in bottom reflection loss with grazing angle as a function of frequency is associated with the sound speed variation in the thin surficial sediment layer, which is resolvable by our mid-to-high-frequency acoustic measurements.
Table 4. Constrained Ranges of Geoacoustic parameters used for the inversion
Para meter
Initial Search Space
Final Search Space
c2 (0) (m/s) 1550 - 1620
1560 - 1580
c2 (L) (m/s) c2 (0)-1700 1620 - 1680
c3 (m/s) 1550-1700 1620-1680
ρ2 (g/cm3) 2.0 2.0
ρ3 (g/cm3) 2.0 2.0
L (m) 0.1 - 0.3 0.1 - 0.2
α2/f (dB/m/kHz)
0.5 - 0.8 0.6 - 0.8
α3 /f (dB/m/kHz)
0.5 - 0.8
Fig. 3: Best fit geo-acoustic parameters for 2-layered sediment model and associated uncertainties
6. Summary and Discussion
Bottom loss measurements were carried at a shallow water location off the west coast of India in the frequency band of 5-15 kHz for seabed grazing angles ranging from 4-160. LFM pulses (5-15 kHz and 100ms) were transmitted to estimate channel impulse response. Matched filtering technique was utilized to identify the direct and bottom path arrivals and the bottom loss was estimated. Measured bottom loss as a function of frequency and grazing angle was compared to a homogeneous half-space model based on the sediments parameters derived empirically from grain size measurements at the test site by [12].
It is clearly observed that the half-space model fails to provide accurate results for grazing angles above 10 degrees especially at higher frequencies. For improved modelling of bottom loss over the entire range of grazing angles and frequencies, a two-layered sediment underlying a water layer along with a set of geo-acoustic parameters is considered and the plane wave reflection coefficient associated
![Page 7: [IEEE 2013 International Symposium on Ocean Electronics (SYMPOL) - Kochi, India (2013.10.23-2013.10.25)] 2013 Ocean Electronics (SYMPOL) - Mid-to-high-frequency geo-acoustic inversion](https://reader042.fdocuments.in/reader042/viewer/2022021920/5750a6781a28abcf0cb9d0b2/html5/page/7.jpg)
72 PROCEEDINGS OF SYMPOL 2013
with it is calculated. The top layer is allowed to have some positive sound speed gradient which is consistent with the presence of sandy sediments. In this layer, the sound speed is allowed to vary as a linear k2 profile, where k is acoustic wave number.
Fig. 4: Bottom loss as a function of grazing angle for a two-layered sediment reflection model. Circles: Measured bottom loss, Solid line: Homogeneous half-space model, Dashed line: Best-fit geo-acoustic model
The second layer is modelled as an infinite half-space of constant sound speed that terminates the bottom impedance. The best-fit
geo-acoustic model is obtained from an exhaustive search over a constrained parameter space based on a weighted least-squared error criterion. It was observed that the best-fit parameter set agree reasonably well with the observations of bottom loss over the entire frequency range. In the 5-15 kHz frequency range, moderate sediment attenuation renders our measurements insensitive to sediment properties greater than a few tens of centimetres below the sediment-water interface. The bottom loss was found to be most sensitive to compressive sound speed and attenuation.
ACKNOWLEDGMENTS The author thanks Director NPOL for
providing facilities and encouragement to the work. Thanks are also due to the fellow scientists and officers for cooperation with logistics and support for conducting the experiment.
References
[1]. H. P. Bucker, J. A. Whitney, G. S. Yes, R. R. Gardner, ‘Reflection of low frequency sonar signals from a smooth ocean bottom’, J. Acoust. Soc. Am. 37, pp. 1037–1051, 1965.
[2]. G. J. Heard, ‘Bottom reflection coefficient measurement and geo-acoustic inversion at the continental margin near Vancouver Island with the aid of spiking filters’, J. Acoust. Soc. Am. 101, pp. 1953–1960, 1997.
[3]. M. A. Ainslie, ‘Reflection and transmission coefficients for layered fluid sediment overlying a uniform solid substrate’, J. Acoust. Soc. Am. 99, pp. 893–902, 1996.
[4]. Robins, ‘Reflection of a plane wave from a fluid layer with continuously varying
![Page 8: [IEEE 2013 International Symposium on Ocean Electronics (SYMPOL) - Kochi, India (2013.10.23-2013.10.25)] 2013 Ocean Electronics (SYMPOL) - Mid-to-high-frequency geo-acoustic inversion](https://reader042.fdocuments.in/reader042/viewer/2022021920/5750a6781a28abcf0cb9d0b2/html5/page/8.jpg)
Sreeram Radhakrishnan: Geo-acoustic inversion using bottom loss data 73
density and sound speed’, J. Acoust. Soc. Am. 89, pp. 1686–1696, 1991.
[5]. [N. R. Chapman, ‘Modelling ocean-bottom reflection loss measurements with the plane-wave reflection coefficient’, J. Acoust. Soc. Am. 73, pp. 1601–1607, 1983.
[6]. N. P. Chotiros, ‘Normal incidence reflection loss from a sandy sediment’, J. Acoust. Soc. Am.112, pp. 1831–1841, 2002.
[7]. W. Spofford, ‘Inference of geo-acoustic parameters from bottom loss data’, in Bottom-Interacting Ocean Acoustics, edited by W. A. Kupermanand F. B. Jensen (Plenum, New York), pp. 159–171, 1980.
[8]. W. Holland, J. Dettmer, and S. E. Dosso, ‘Remote sensing of sediment density and velocity gradients in the transition layer’, J. Acoust.Soc. Am.118, pp. 163–177, 2005.
[9]. J. W. Choi and P. H. Dahl, ‘Mid-to-high-frequency bottom loss in the East China
Sea’, IEEE J. Ocean. Eng. 29, pp. 980–987, 2004.
[10]. J. Yang, D. R. Jackson, D. Tang, ‘Mid-frequency geoacoustic inversion using bottom loss data from the Shallow water 2006 Experiment’, J. Acoust. Soc. Am.131, pp. 1711–1721, 2011.
[11]. R. E. Francois and G. R. Garrison, ‘Sound absorption based on ocean measurements: Part II: Boric acid contribution and equation for total absorption’, J. Acoust. Soc. Am., 72, pp. 1879–1890, 1982.
[12]. Pradeep Kumar T. et al., ‘Departmental Research Report’, Report No. NPOL-RR-32(11)/2009 (2009).
[13]. H. Medwin and C. S. Clay, ‘Fundamentals of Acoustical Oceanography’, Academic: Boston, MA, 1998, pp. 41-58.
[14]. P. D. Mourad and D. R. Jackson, ‘High frequency sonar equation models for bottom backscatter and forward loss’, in Proc. IEEE OCEAN’89, New York, 1989, pp. 1168-1175, 1989.