[IEEE 2012 China International Conference on Electricity Distribution (CICED) - Shanghai, China...
5
.�. 2012 China Inteational Conference on Electricity Distribution (CICED 2012) Shanghai, 5-6 Sep. 2012 Study on novel zzy controller and its application in PWM inverters LIU Xiao-xian\ wu Wei-nong\ ZOU Lei2,DONG Ya-Ii 2 (I.Chongqing Power Information & Communication Branch Company, 401123,China; 2. Chongqing Runbridge Communication CO.,Ltd, 401122, China) Abstract-With the development of power electronics, PWM inverters become more and more important and gain more and more wide applications. PWM inverters are common parts of a lot of power electronic devices and their controller design is very important for working performance. In order to better adapt the nonlinearity and uncertainty of power system, and absorb the advantages of conventional PI controller and fuzzy controller and conquer their disadvantages, this paper proposes a novel fuzzy self adjustable PI controller. In this novel controller, the parameters of PI controller are dynamically adjusted by fuzzy self adjustable controller, so the high steady-state precision and fast dynamic responding speed can all be obtained at the same time. The novel controller designed in this paper has simple structure and is very convenient to be realized in digital control system, which improves the practicability of the proposed controller. Finally, the proposed controller is applied into the active power filter device which is composed of PWM inverter. Simulation and experiment results verify the effectiveness and superiority of the proposed controller. Keywords-Self adjustable, fuzzy control, PWM inverter, active power filter 1 . INTRODUCTIONS With the development of power electronics and digital signal processing techniques, a lot of power devices appear to solve different power quality problems. These devices all base on PWM inverters [ l , 2] . And the PWM inverters are also the main components of wind power and photovoltaic devices. So the PWM inverters become a common study issue. For PWM inverters the control system is very important for the device performance, and it is the core of the whole device. When designing the controller, the steady-state and transient performance should be both considered, and its practicability in engineering applications must be considered too. In recent years, more and more attention has been paid to PWM inverter control strategies, and different control theories have been applied into PWM inverter controllers. The most common is PI controller with advantages of simple structure and strong engineering practicability. But the fatal disadvantage of PI controller is that it depends on the precise mathematical model of system being controlled and cannot adapt power system with nonlinearity and uncertainty; rthermore, the parameters of PI controller are very difficult to be set properly l3 0 5] . While fuzzy control theory can well conquer this problem. The praiseworthy advantage of zzy controller is that it doesn't depend on the mathematical model of system, and it can conquer nonlinearity effect and has strong robustness to system being controlled [ 6 0 8 ] . But its steady-state performance is always not satisfactory. With the development of zzy theory, the fuzzy controller gains more and more applications in different fields. The existed zzy controller has some limits, such as fixed control rules and complex hardware realization. Based on the contents mentioned above, regarding the PWM inverters as study objects, this paper proposes a novel fuzzy self adjustable PI controller. In this novel controller, the parameters of PI controller are dynamically adjusted by zzy self adjustable controller. Because the zzy self adjustment is executed in the whole region, and its adjustment process can well accord with people thinking characteristics during decision-making process, the high steady-state precision and fast dynamic responding speed can all be obtained at the same time. The proposed control strategy can effectively improve object tracking characteristics and anti-interference and robustness, and it has little calculation burden and is very convenient to be realized. 2. THE STRUCTURES AND OPERATING PRINCIPLES OF PWM INVERTERS According to DC source types, the inverters can be divided into voltage-source inverters (VSls) and cuent-source inverters (CSIs). The input side of VSI is connected large capacity capacitors, and the inverters convert DC voltage into AC voltage; while the input side of CSI is connected large capacity inductors, and the inverters convert DC current into AC current. Recently, VSls become the emphases of PWM inverters with advantages of simple structure, low loss and convenient control system. This paper adopted voltage-source three-phase inverter as study object, as shown in Fig. l. ClCED2012 Session 3 Paper No CP0297 Pagel/5
Transcript of [IEEE 2012 China International Conference on Electricity Distribution (CICED) - Shanghai, China...
![Page 1: [IEEE 2012 China International Conference on Electricity Distribution (CICED) - Shanghai, China (2012.09.10-2012.09.14)] 2012 China International Conference on Electricity Distribution](https://reader040.fdocuments.in/reader040/viewer/2022020618/575097011a28abbf6bcf91dd/html5/page/1.jpg)
.�. 2012 China International Conference on Electricity Distribution (CICED 2012) Shanghai, 5-6 Sep. 2012
Study on novel fuzzy controller and its application in PWM inverters
LIU Xiao-xian\ wu Wei-nong\ ZOU Lei2,DONG Ya-Ii 2
(I.Chongqing Power Information & Communication Branch Company, 401123,China;
2. Chongqing Runbridge Communication CO.,Ltd, 401122, China)
Abstract-With the development of power electronics,
PWM inverters become more and more important and gain
more and more wide applications. PWM inverters are
common parts of a lot of power electronic devices and their
controller design is very important for working performance.
In order to better adapt the nonlinearity and uncertainty of
power system, and absorb the advantages of conventional PI
controller and fuzzy controller and conquer their
disadvantages, this paper proposes a novel fuzzy self
adjustable PI controller. In this novel controller, the
parameters of PI controller are dynamically adjusted by
fuzzy self adjustable controller, so the high steady-state
precision and fast dynamic responding speed can all be
obtained at the same time. The novel controller designed in
this paper has simple structure and is very convenient to be
realized in digital control system, which improves the
practicability of the proposed controller. Finally, the
proposed controller is applied into the active power filter
device which is composed of PWM inverter. Simulation and
experiment results verify the effectiveness and superiority of
the proposed controller.
Keywords-Self adjustable, fuzzy control, PWM inverter,
active power filter
1 . INTRODUCTIONS
With the development of power electronics and digital
signal processing techniques, a lot of power devices appear to solve different power quality problems. These devices
all base on PWM inverters[l,2]. And the PWM inverters are also the main components of wind power and photovoltaic
devices. So the PWM inverters become a common study issue. For PWM inverters the control system is very important for the device performance, and it is the core of
the whole device. When designing the controller, the
steady-state and transient performance should be both considered, and its practicability in engineering
applications must be considered too.
In recent years, more and more attention has been paid to PWM inverter control strategies, and different
control theories have been applied into PWM inverter
controllers. The most common is PI controller with advantages of simple structure and strong engineering
practicability. But the fatal disadvantage of PI controller is that it depends on the precise mathematical model of system being controlled and cannot adapt power system
with nonlinearity and uncertainty; furthermore, the
parameters of PI controller are very difficult to be set properlyl305].
While fuzzy control theory can well conquer this
problem. The praiseworthy advantage of fuzzy controller is that it doesn't depend on the mathematical model of
system, and it can conquer nonlinearity effect and has
strong robustness to system being controlled [608]. But its
steady-state performance is always not satisfactory. With the development of fuzzy theory, the fuzzy controller gains
more and more applications in different fields. The existed fuzzy controller has some limits, such as fixed control
rules and complex hardware realization. Based on the contents mentioned above, regarding the
PWM inverters as study objects, this paper proposes a novel fuzzy self adjustable PI controller. In this novel controller, the parameters of PI controller are dynamically adjusted by fuzzy self adjustable controller. Because the fuzzy self adjustment is executed in the whole region, and
its adjustment process can well accord with people
thinking characteristics during decision-making process,
the high steady-state precision and fast dynamic responding speed can all be obtained at the same time. The
proposed control strategy can effectively improve object tracking characteristics and anti-interference and
robustness, and it has little calculation burden and is very convenient to be realized.
2. THE STRUCTURES AND OPERATING PRINCIPLES
OF PWM INVERTERS
According to DC source types, the inverters can be divided into voltage-source inverters (VSls) and current-source inverters (CSIs). The input side of VSI is
connected large capacity capacitors, and the inverters convert DC voltage into AC voltage; while the input side
of CSI is connected large capacity inductors, and the
inverters convert DC current into AC current. Recently, VSls become the emphases of PWM inverters with
advantages of simple structure, low loss and convenient
control system. This paper adopted voltage-source three-phase inverter as study object, as shown in Fig.l .
ClCED2012 Session 3 Paper No CP0297 Pagel/5
![Page 2: [IEEE 2012 China International Conference on Electricity Distribution (CICED) - Shanghai, China (2012.09.10-2012.09.14)] 2012 China International Conference on Electricity Distribution](https://reader040.fdocuments.in/reader040/viewer/2022020618/575097011a28abbf6bcf91dd/html5/page/2.jpg)
2012 China International Conference on Electricity Distribution (CICED 2012) Shanghai, 5-6 Sep. 2012
A_,..-_....I
B __ ���� __ -+ ____ �
C--++,-Jn�-T---;---'
Reference Current
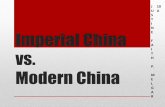
Fig.l The structure of three-phase VSI
From Fig.l, it can be seen that the whole device
functions properly by close-loop control of output
current of PWM inverter. First, the real output current is
detected, and it is compared to the specified reference
current to get the error information. Then the current
error signals are input to the controller to get responding
output voltage signals, and then through PWM
modulation segment, the final PWM signals to control
IGBTs are obtained. And through controlling the
turn-on and shut-off of TGBTs, the PWM inverters can
output proper voltages and currents with any frequency,
any amplitude and any phase.
3. DESIGN OF FUZZY SELF ADJUSTABLE PI CONTROLLER
3.1 Design of fuzzy self adjustable controller
In fuzzy control system, the system will be
influenced greatly by the performance of fuzzy controller, and the performance of fuzzy controller
depends on the fuzzy rules determination and adjustment. In conventional fuzzy controller, the fuzzy
control rules cannot change, so it is not satisfactory in
complex systems. So the designed fuzzy control system must have adjustable control rules.
Based on the study mentioned above, an adjustable
parameter is introduced to regulate the control rules, and
a fuzzy controller with adjustable factor in the whole
region is designed to adapt the system complexity and variety. The designed controller is as shown in Fig.2.
Fig.2 The structure scheme of fuzzy controller
Tn this fuzzy controller, the error and its variation
ratio are fuzzified to E* and ii*, and the fuzzy
variables are input to the controller, and by fuzzy
deducing logic, the fuzzy output U* is then obtained.
The fuzzy control rules with self adjustable factor in the
whole region are adopted as follows.
{u* =-(aE* +(l-a)£*)
a = � (as -ao) I E* I + ao (I)
There into, 0::;; ao < a, ::;; 1, and they are constants,
a E [ao ' as ] is self adj ustable factor. The
characteristics of the control rules are that the adjustable
factor a verifies linearly between ao and as with
the variation of IE* I , and it can adjust the weight of
E according to the magnitude of E. This adjustment
process well coincide the error control logic and optimization can be realized.
In order to realize convenient engineering
applications of fuzzy controller and improve the
practicability of the fuzzy controller, being different from conventional fuzzification and defuzzification methods, the
method of non-uniform quantization is used during the process of fuzzification and defuzzification. Dividing the
region into [-N, N], when the exact values of E and
£ are small, we divide them finely; conversely when they are large, we divide them coarsely. And probability statistic method has been adopted in ascertaining the dividing
sections. We can omit the process of ascertaining
membership functions because the dividing method itself is a process of ascertaining membership function. For
example, regarding N as 7 and the fuzzification of E is as shown in Fig.3.
In order to further improve the adaptability of system,
all variables are normalized in the whole control system.
-0.7 -0.5 : I
I
-0,1 0 0.1 I ({3 0.5: 0.7 0.9 I
Fig.3 The non-uniform quantization of error
For example, in Fig.3 when error signal E:?: 0.6 , it is
qualified as N=7; when error signal 0.3::::; E ::::; 0.6, it is
qualified as N=6; when error signal 0.2::::; E ::::; 0.3 , it is
qualified as N=5. And when the error becomes smaller and
smaller, the qualification process becomes more and more finely. It can be seen that the qualification process is not uniform. When the error is large, we divide them coarsely; conversely when they are small, we divide them fmely.
The fuzzy values U* can be calculated out by fuzzy
deduction, and then it is rounded into integer. Then the
exact control values U can be gained through
ClCED2012 Session 3 Paper No CP0297 Page2/5
![Page 3: [IEEE 2012 China International Conference on Electricity Distribution (CICED) - Shanghai, China (2012.09.10-2012.09.14)] 2012 China International Conference on Electricity Distribution](https://reader040.fdocuments.in/reader040/viewer/2022020618/575097011a28abbf6bcf91dd/html5/page/3.jpg)
· . -GOY .. � 2012 China International Conference on Electricity Distribution (C[CED 2012) Shanghai, 5-6 Sep. 2012
non-uniform defuzzifier. After considering the peak value
limit of the control variables the real system can be controlled.
3.2 Novel fuzzy self adjustable P[ controller
[n order to improve the robustness and anti-inference
ability of control system, this paper introduces fuzzy
control theory into PI controller, and a fuzzy controller
with self adjustable factor is proposed in this paper to
adjust the parameters of P[ controller. The P[ controller
and fuzzy controller are combined effectively, so they can
conquer the drawbacks of each other and obtain excellent
performance in both transient and steady state.
In conventional PI controller, the role of proportional
component is to reflect the error signal E of control
system proportionally. Once the error E is generated, the
controller actions quickly in order to decrease the error. If
the value of proportional control parameters Kp is always
very large, the system oscillations will happen that destroy
the system dynamic performance. Based on that mentioned
above, when error E is large, the Kp is set a large value
in order to improve system dynamic performance; while
when error is small, the Kp should be set a small value in
order to avoid overshoot and system oscillations. And at
the same time, the factor of variation ratio £ should be
considered. When E and i; remains same signs, that
indicates the output departures from steady state, so Kp should be enlarged; while reverse, Kp should be
decreased. The characteristic of the control rules shown in ( 1) is
that the factor a can regulate in the whole region. When
the error E is very big, it indicates that the system is far from balance state. So the controller should enlarge its control variables in order to make the system attain balance state as soon as possible. In this case, the error E plays a more important role in control variables. However, when the error E is very small, it indicates that the system is close to the balance state. [n order to make the
system steady and restrain the oscillations as soon as possible, the most important thing is to decrease the overshoot. Then the role of E in the control variables is
small while the role of E becomes large. The self-adjustable factor can regulate in the whole region
similar to thinking characteristics of human being in the process of controlling. And as a result it can realize
optimization.
The role of integrating component is mainly to eliminate steady state error and improve the steady precision. The integrating component integrates error
signal and will appear certain lagging function. [f the
function of integrating component is too strong, the system overshoot will happen, furthermore, system oscillation will
happen. [n conventional P[ controller, in order to avoid integrating saturation, the integrating loop is often
separated out. When the error is very large, the value of
Kj is set to zero in order to avoid overshoot, while when
the error is small, the value of Kj increases with the
decreasing of error in order to eliminate the steady state error and improve controlling precision.
The designed controller is as shown in FigA. The
combined controller is composed of PI controller and
fuzzy controller with self adjustable factor. The function of
fuzzy controller with self adjustable factor is mainly to adjust the controlling parameters of P[ controller
instantaneously. [n the proposed fuzzy controller, the fuzzy
values E* and i;* of error signal E and its incremental
variation E are regarded as inputs, through fuzzy deducing, the adjustment values of PI controller
parameters are output from the fuzzy controller based on
the pre-setting values in order to attain the best controlling performance.
Fig. 4 The scheme of novel controller
The adopted fuzzy controller is a two-dimension input and two-dimension output controller. [t calculates the
values of Mp and Mj according to different input E and £. And then the adjustment of PI controller parameters can be realized, as shown in (2). {Kp = K1,o + Mp
Kj =Kro+Mj (2)
There into, Kpo and Kro is the pre-setting values of
controller parameters.
The proposed fuzzy adjusting rules of Kp with self
adjustable factor are shown in follows. {f...Kp = (aE' +C1-a)£') aK? = � (as -ao)IE*I+ao
(3)
The proposed fuzzy adjusting rules of K] with self
adjustable factor are shown in follows.
Kj =0
f...Kj = -(aE* + (1-a)£*) Kj = Kro +f...Kj aKr =�(as -ao)IE'I+ao
N
(4)
The adjustment rules shown in (4) is based on the
adjustment principles mentioned above, that is when the
error is very large, the increment component is not adopted in order to avoid too larger overshoot and oscillations; while when the error is small to certain degree, the increment component is plunged into and its function
becomes stronger in order to improve steady state
precision.
The novel control system as shown in FigA is applied into controller part in Fig.2, and then the fuzzy self
ClCED2012 Session 3 Paper No CP0297 Page3/5
![Page 4: [IEEE 2012 China International Conference on Electricity Distribution (CICED) - Shanghai, China (2012.09.10-2012.09.14)] 2012 China International Conference on Electricity Distribution](https://reader040.fdocuments.in/reader040/viewer/2022020618/575097011a28abbf6bcf91dd/html5/page/4.jpg)
2012 China International Conference on Electricity Distribution (CICED 2012) Shanghai, 5-6 Sep, 2012
adjustable PI controller of PWM inverter is realized,
4, SIMULA nON AND EXPERIMENT RESULTS
PWM inverters gain more and more applications in
different power electronics compensating and controlling
devices, and they function differently in different devices,
The PWM inverter can function as active power filter (APF) as shown in Fig,S, We can see that the main
topology of APF is PWM inverter, and through effective controlling of output current, APF can well eliminate
harmonic current and compensate reactive power current. The compensating principles of APF are not detailed
in this paper, The whole control system of APF is as shown
in Fig,6, We can see that the whole control system is composed of two controllers, The outer-loop is DC-voltage
controller in order to maintain DC-link voltage, and the
inner-loop is current tracking controller which detects the
error signal of output current and generates switch acting signals to drive semiconductors, The designed novel
controller is applied into the inner-loop current controller of APF and the inner-loop controller directly determines
the APF operating performance, The outer-loop voltage controller adopts the common PI controller because this
loop is much simpler,
Fig,S The scheme of APF system
Fig,6 The scheme of APF control system
Simulation results are shown in Fig,7, Channel 1 is
the load current which also is the source current before compensation with APF, Channel 2 is the compensated
source current, and channel 3 is the compensating current output by APF. It can be seen that through fuzzy self
adjustable PI controller functioning properly, the APF can
well eliminate harmonic current, and it can track quickly when load currents vary, That the steady precision and transient tracking speed are both attained, The THD of
source current decreases from 27,68% to 4,56% with APF
application, The compensated source currents can meet the
national requirements of harmonic eliminating
�:: t. ,LI1"'. "/111"" ,/111-. ..
' j� ," IIh,
'/ilk ,
'1Ih , ' 1Ih1
�,: � 0.04 0..0.6 0.08 0.1 as) 0..'2 0..'4 0.16 0.19
Fig,7 Simulation results of novel controller applied into APF system
Experiment results are shown in Fig,8, The source current before compensation is distorted seriously like the
channell waveform in Fig,7, In Fig,8, channell is the compensated source currents, and channel 2 is the
compensating current output by APF. It can be seen that
the experiment results well coincide with simulation results, With the novel controller proposed in this paper, APF can function well, and the steady and transient
performance of system is both excellent. Fig,9 shows the reference output current and real
output current of APF. We can see that with the novel
controller, APF can well track reference current, and the tracking speed is quick, tracking error is small. And all those verify the excellent performance of APF and novel controller proposed in this paper,
Fig,S Compensated source current and compensating current output by APF
Fig,S Reference output current and real output current of APF
ClCED2012 Session 3 Paper No CP0297 Page4/5
![Page 5: [IEEE 2012 China International Conference on Electricity Distribution (CICED) - Shanghai, China (2012.09.10-2012.09.14)] 2012 China International Conference on Electricity Distribution](https://reader040.fdocuments.in/reader040/viewer/2022020618/575097011a28abbf6bcf91dd/html5/page/5.jpg)
· . -GOY .. � 2012 China International Conference on Electricity Distribution (CICED 2012)
5. CONCLUSIONS
With the development of power electronics, the
applications of PWM inverters become more and more
wide. And precise control becomes more important too. Based on the disadvantages of conventional PI controller
and fuzzy controller, a novel fuzzy self adjustable PI controller is proposed in this paper. This novel controller absorbs the merits of PI controller which has high accuracy in steady state and fuzzy controller which has strong
robustness and excellent self-adaptability in transient state.
The novel controller designed in this paper has simple structure and is very convenient to be realized in digital
control system, which improves the practicability of the proposed controller in engineering applications. Finally,
the proposed controller is applied into the active power filter device which is composed of PWM inverter. And
simulation and experiment results verify the effectiveness and superiority of the proposed novel controller.
REFERENCES
[I] Wang Zhaoan, Yang Jun, Liu Jinjun. Harmonics Restraint and Reactive Power compensation [M]. Bei ling: China Machine Press, 1998.
[2] Singh B, AI-Haddad K, Chandra A. A review of active filters for power quality improvement[J]. IEEE Trans on Industrial Electronics, 1999, 46( 5): 960-971.
[3] D.M. Brod, D.W Novotny. Current Control of V SI-PWM Inverters. IEEE Procs. of IAS.1984: 418-425.
[4] 1. Dixon, S. Tepper, 1. Moran. Practical Evaluation of Different Modulation Techniques for Current-Controlled V oltage Source
Inverters. lEE procs. Electr. Power App!. 1996, 143(4): 301-306. [5] Marian P. Kazmierkowski, Luigi Malesani. Current Control
Techniques for Three-Phase Voltage-Source PWM Converters: A Survey. IEEE Trans. on Industrial Electronics. 1998, 45(5): 691-703
[6] Xu Wanfang, Luo An, Wang Lina, etal. Development of Hybrid Active Power Filter Using Intelligent Controller[J]. Automation of Electric Power Systems, 2003, 27 (10): 49-52.
[7] S.K.Jain,P.Agrawal, etal. Fuzzy logic controlled shunt active power filter for power quality improvement[J]. IEE Proc.-Eletrc. Power Apply, 2002,149 (5):317-328.
[8] Huang Zhenyu, et al. Study on Fuzzy Modulation Control of UPFC. Power System and Automation, 2000 (25).
LlU Xiao-xian was born in Sichuan, China, in 1962. Currently, he works as a senior engineer with ChongQing Electric Power Corporation, China. His research interest include the automation and information of electric power system.
WU Wei-nong was born in Sichuan, China, in 1965. Currently, he works as a senior engineer with ChongQing Electric Power Corporation,
China. His research interest include the communication and information
of electric power system. ZOU Lei was born in Chongqing, China, in 1969. BE in
Engineering of HAERBIN ship engineering University of Electronic Technology,his main research direction is power electronic and communications technology.
DONG Ya-Ii was born in Hubei, China, in 1986. Master's degree, her main research direction is power electronic technology.
ClCED2012 Session 3 Paper No CP0297
Shanghai, 5-6 Sep. 2012
Page5/5