[IEEE 2011 IEEE 2nd International Conference on Computing, Control and Industrial Engineering (CCIE...
4
Comparison of Matched Filter and Dechirp Processing Used in Linear Frequency Modulation Jun Wang, Duoduo Cai, Yaya Wen Department of Electronic and Information Engineering Beijing University of Aeronautics and Astronautics (BUAA) Beijing, China Email:[email protected] Abstract—Linear Frequency Modulation (LFM) is an important wideband signal, which is widely used in radar system. Both matched filter and dechirp processing can realize pulse compression of LFM, and then get high resolution target range profile. Matched filter has strong anti-noise ability; it can also achieve accurate pulse compression under seriously noisy environment. Dechirp processing can reduce the sample rate of AD efficiently, but the anti-noise ability is not as good as matched filter. This paper analyzes the algorithms of matched filter and dechirp processing which are used in LFM, then simulates the pulse compression to get high resolution target one-dimension range profile under different signal to noise ratio (SNR). The simulation results indicate that matched filter has strong anti-noise ability, dechirp processing has advantage in sample rate of data processing by hardware. This work can provide the theory basis and guidance to select the best pulse compression method under different scenes. Keywords-matched filter; dechirp processing; pulse compression; high resolution range profile I. INTRODUCTION In modern military applications, it requests the radar system to have high range and high speed measuring resolution, far detecting distance, strong anti-noise ability, exact target recognition and radar imaging. High precision radar has big time width and bandwidth product; it can realize high range resolution under the premise of required transmission power, which lays the foundation for target recognition and imaging. Stepped frequency and LFM are two important high resolution radar signals. Stepped frequency syntheses equivalent wideband signal through transmitting pulse sequence whose frequency increases gradually, it has high range detecting accuracy, strong anti- noise ability etc. LFM transmits wideband signal and obtains high range resolution through pulse compression, it has big time width and bandwidth product. At the time of increasing transmitting power for the large range detecting, it also maintains high range resolution, which is effective to solve the contradictions between the maximum distance detecting and high resolution for high-performance radar. LFM has strong anti-noise ability and high signal to noise ratio (SNR) to detect target profitably, therefore it becomes the research focus. The pulse compression technology of LFM can be realized by matched filter and dechirp processing. Matched filter can be divided into the time-domain and frequency- domain, frequency-domain matched filter has simple structure and quite mature technology. Dechip processing can down the sample rate and data quantity effectively, it is simple and flexibility for hardware, now it is widely used in ISAR imaging field. II. LFM SIGNAL THEORY LFM pulse signal is constructed by rectangle transmitting pulse whose width is and carrier frequency f which increases linearly from 1 f to 2 f . Assume the signal amplitude normalized, initial frequency is 0 f , signal bandwidth is B , pulse width is , pulse period is and number of transmitting pulse is . From Figure1 it can be known that the signal bandwidth is r T 1 N 2 B f f f , and frequency modulation slope is defined as 2 1 f f B k . Figure 1. The frequency of LFM sketch map The i th LFM transmitting pulse signal can be given as follows 2 0 1 2 [ ( ) ( )] 2 2 () ( ) r r r j f t iT kt iT i t iT st rect e (1) where 0,1, 2...( 1) i N . Assume the static target distance is R , the speed of light is , so the round-trip time delay is c 2 d R t c .In the actual environment, there is noise with useful signal, so the echo ___________________________________ 978-1-4244-9600-6/11/$26.00 ©2011 IEEE
Transcript of [IEEE 2011 IEEE 2nd International Conference on Computing, Control and Industrial Engineering (CCIE...
![Page 1: [IEEE 2011 IEEE 2nd International Conference on Computing, Control and Industrial Engineering (CCIE 2011) - Wuhan, China (2011.08.20-2011.08.21)] 2011 IEEE 2nd International Conference](https://reader043.fdocuments.in/reader043/viewer/2022030114/5750a1671a28abcf0c934f3e/html5/page/1.jpg)
Comparison of Matched Filter and Dechirp Processing Used in Linear Frequency Modulation
Jun Wang, Duoduo Cai, Yaya Wen Department of Electronic and Information Engineering
Beijing University of Aeronautics and Astronautics (BUAA) Beijing, China
Email:[email protected]
Abstract—Linear Frequency Modulation (LFM) is an important wideband signal, which is widely used in radar system. Both matched filter and dechirp processing can realize pulse compression of LFM, and then get high resolution target range profile. Matched filter has strong anti-noise ability; it can also achieve accurate pulse compression under seriously noisy environment. Dechirp processing can reduce the sample rate of AD efficiently, but the anti-noise ability is not as good as matched filter. This paper analyzes the algorithms of matched filter and dechirp processing which are used in LFM, then simulates the pulse compression to get high resolution target one-dimension range profile under different signal to noise ratio (SNR). The simulation results indicate that matched filter has strong anti-noise ability, dechirp processing has advantage in sample rate of data processing by hardware. This work can provide the theory basis and guidance to select the best pulse compression method under different scenes.
Keywords-matched filter; dechirp processing; pulse compression; high resolution range profile
I. INTRODUCTION
In modern military applications, it requests the radar system to have high range and high speed measuring resolution, far detecting distance, strong anti-noise ability, exact target recognition and radar imaging. High precision radar has big time width and bandwidth product; it can realize high range resolution under the premise of required transmission power, which lays the foundation for target recognition and imaging. Stepped frequency and LFM are two important high resolution radar signals. Stepped frequency syntheses equivalent wideband signal through transmitting pulse sequence whose frequency increases gradually, it has high range detecting accuracy, strong anti-noise ability etc. LFM transmits wideband signal and obtains high range resolution through pulse compression, it has big time width and bandwidth product. At the time of increasing transmitting power for the large range detecting, it also maintains high range resolution, which is effective to solve the contradictions between the maximum distance detecting and high resolution for high-performance radar. LFM has strong anti-noise ability and high signal to noise ratio (SNR) to detect target profitably, therefore it becomes the research focus. The pulse compression technology of LFM can be realized by matched filter and dechirp processing. Matched filter can be divided into the time-domain and frequency-domain, frequency-domain matched filter has simple
structure and quite mature technology. Dechip processing can down the sample rate and data quantity effectively, it is simple and flexibility for hardware, now it is widely used in ISAR imaging field.
II. LFM SIGNAL THEORY
LFM pulse signal is constructed by rectangle transmitting pulse whose width is � and carrier frequency f which
increases linearly from 1f to 2f . Assume the signal
amplitude normalized, initial frequency is 0f , signal
bandwidth is B , pulse width is� , pulse period is and number of transmitting pulse is . From Figure1 it can be known that the signal bandwidth is
rT
1
N2B f f f� � � � , and
frequency modulation slope is defined as 2 1f f Bk� ��
� � .
Figure 1. The frequency of LFM sketch map
The i th LFM transmitting pulse signal can be given as follows
20
12 [ ( ) ( ) ]22( ) ( ) r rr j f t iT k t iT
i
t iTs t rect e
�
�
�� � � �
� �� (1)
where 0,1, 2...( 1)i N� � .Assume the static target distance is R , the speed of light
is , so the round-trip time delay isc 2d
Rtc
� .In the actual
environment, there is noise with useful signal, so the echo
___________________________________ 978-1-4244-9600-6/11/$26.00 ©2011 IEEE
![Page 2: [IEEE 2011 IEEE 2nd International Conference on Computing, Control and Industrial Engineering (CCIE 2011) - Wuhan, China (2011.08.20-2011.08.21)] 2011 IEEE 2nd International Conference](https://reader043.fdocuments.in/reader043/viewer/2022030114/5750a1671a28abcf0c934f3e/html5/page/2.jpg)
signal added noise graph can be described as follows in Figure2.
Figure 2. LFM echo signal
The i th received pulse signal can be represented as
20
12 [ ( ) ( ) ]22( ) ( ) r d r dr d j f t iT t k t iT t
i
t iT tr t rect e
�
�
�� � � � � �
� � �� (2)
where .0,1, 2...( 1)i N� �It can be seen that the echo signal contains target time
delay information. It needs to take corresponding algorithm to pick up the target range parameter after processing of echo signal. In the radar signal processing algorithm, matched filter and dechirp processing are very important.
III. MATCHED FILTER AND DECHIP PROCESSING
Both matched filter and dechirp processing can realize the pulse compression of LFM signal. They all have their own advantages and application environment. Matched filter analyzes from time-domain, while dechirp processing from frequency-domain. Though matched filter analyzes the signal in time-domain, but it has time-domain and frequency-domain realization. After right pulse compression, it can get the target one-dimension range profile. Now we introduce matched filter and dechirp processing separately as follows.
A. Matched filter Matched filter can be implemented in time-domain and
frequency-domain. In this paper, it mainly analyzes the frequency-domain matched filter which can realize the pulse compression effectively. Matched filter coefficients are designed according to the vibration signal. Figure3 gives out the model for frequency-domain matched filter.
Figure 3. Matched filter model
LFM frequency-domain matched filter algorithm firstly calculates the echo spectrum by FFT, then multiplies them with the matched filter response function parameters
(where is conjugate operation), lastly does IFFT of the result. In fact, this algorithm finally analyzes the echo signal pulse compression in time-domain. After the pulse compression, it can get the
target one-dimension range profile. From the range profile it can calculate the echo time delay information relative to the reference signal and get the target range parameter. Frequency-domain matched filter can be represented as follows
0( ) [ ( ( ))]H w conj FFT s t� [ ]conj
0( ) { [ [ ( )]] [ ( )]}i iy t IFFT conj FFT s t FFT r t� (3) where 0,1, 2,... 1i N� � .
The process can be described in Figure4. It is known that the pulse compression result is like sinc function, which can provide much information about the target.
Figure 4. Matched filter algorithm process
B. Dechip processing Dechirp processing directly use the echo from reference
distances to demodulation the received signal. Select echo signal as the reference signal. After multiply the echo
with the conjugation of , it can get the single signal which contains time delay information, then does FFT, it could obtain the pulse compression frequency-domain result. According to the relation between frequency
1( )r t
2 ( )r t 1( )r t
f� and time delay t� , it can find out the expression as follows
Bf k t t�
� � � � � (4) 2t t t� � � 1
where is the time delay of echo signal , is the time
delay of echo signal .1t 1( )r t 2t
2 ( )r tFrom the Equation (4), it can get the time delay between
echo signals and , then find the target range parameter and high resolution range profile. Dechirp processing formula can be expressed as
2 ( )r t 1( )r t
(5) 2 1( ) { ( ) * [ ( )]}y t FFT r t conj r t�
Figure 5. Dechirp processing model
![Page 3: [IEEE 2011 IEEE 2nd International Conference on Computing, Control and Industrial Engineering (CCIE 2011) - Wuhan, China (2011.08.20-2011.08.21)] 2011 IEEE 2nd International Conference](https://reader043.fdocuments.in/reader043/viewer/2022030114/5750a1671a28abcf0c934f3e/html5/page/3.jpg)
Figure5 shows the model of dechirp processing. Obviously it is operated in frequency-domain. After the FFT of the AD sample signal, we can get the pulse compression range profile. The algorithm process of dechirp processing is given in Figure6.
Figure 6. Dechirp processing algorithm process
In actual radar system, the echo signal always contains noise. When there is noise, matched filter algorithm only has noise in the echo signal, because the filter coefficients are obtained by the transmitting signal beforehand. Otherwise, dechirp processing algorithm uses two echo signal pulses to operation, all of them contain noise, therefore the noise influences the dechirp processing more seriously.
IV. SIMULATION ANALYSIS
Now assume the parameters of LFM signal as: the pulse width is 5 6e s� � � , the initial frequency is 0 1 9f e Hz� ,and the bandwidth is 1 8B e Hz�
t e s� � �
t t� � � �
. The echo signal time delay of 1( )r t is 1 6 relative to the reference
signal 0 ( )s t , the echo signal time delay of 2 ( )r t is
e s (so s ), and the noise is Gaussian random distribution. Under different SNR environment, the follows simulate the time delay between echo signal 2 ( )r t and the reference signal 0 ( )s t , the
time delay between the echo signals 2 ( )r t and 1( )r t when SNR=13.6dB, SNR=0dB, SNR=-8dB and SNR=-13.6dB.
1
1.5 6�2� �t 2 1 0.5t� � 6e �
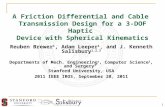
Figure 7. Comparison of matched filter and dechirp processing under different SNR
From the simulation results above, it can be seen that when the SNR=13.6dB, SNR=0dB and SNR=-8dB, both matched filter and dechirp processing can detect the time delay. But when SNR=-13.6dB, matched filter can still detect the time delay while dechirp processing cannot, the target information has already submerged in the noise. Along with the SNR reduced, the noise influences dechirp processing more seriously than matched filter. Therefore the anti-noise ability of matched filter is better than dechirp processing. In strong noisy environment, matched filter is the best choice, it can get the pulse compression result correctly and obtain the high resolution range profile.
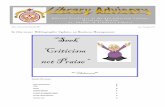
Figure 8. Anti-noise ability comparison of the matched filter and dechirp processing
Figure8 above indicates that when the SNR is smaller than -12dB, dechirp processing will be unstable, the relative time delay error will be much bigger than matched filter. Even dechirp processing is no longer fit for the pulse compression but matched filter is. Matched filter shows the strong anti-noise ability.
V. CONCLUSIONS
The pulse compression algorithm of LFM can be realized by matched filter and dechirp processing. Matched filter analyzes the compression result in time-domain while dechirp processing in frequency-domain. Dechirp processing selects one echo pulse as the reference signal, then processes with other echo pulse. Because dechirp processing can down the signal sample rate of AD, it has advantage in hardware
![Page 4: [IEEE 2011 IEEE 2nd International Conference on Computing, Control and Industrial Engineering (CCIE 2011) - Wuhan, China (2011.08.20-2011.08.21)] 2011 IEEE 2nd International Conference](https://reader043.fdocuments.in/reader043/viewer/2022030114/5750a1671a28abcf0c934f3e/html5/page/4.jpg)
realization. Matched filter produces coefficients according to the vibration signal, and then compresses pulse with the entire echo signal to get target range profile. Matched filter has advantage in anti-noise ability. In practical engineering application, it should select proper pulse compression algorithm according to the scene to get high resolution target range profile.
ACKNOWLEDGMENT
The author would like to thank the mentor and companion for their review, suggestions and comments.
REFERENCES
[1] Zheng Tan, Xiaolin Zhang. “Comparison of frequency domain and time domain method for single tone detection” , Industrial Technology, 2008, ICIT 2008. IEEE International Conference on. 2008, pp. 1-4, doi:10.1109/ICIT.2008.4608476.
[2] Jiangping Xu, Yiming Pi, Zongjie Cao. “UWB LFM echo signal detection and time-delay estimation based on compressive sensing”, Signal Processing (ICSP), 2010 IEEE 10th International Conference on. 2010, pp. 2435-2438, doi:10.1109/ICOSP.2010.5655221.
[3] Wan Yonglun, Si Qiang, Lu Youxin, Wang Hong, Wang Xuegang. “Study of Dechirp pulse Compression Processing Method for Wideband Signals”. ACTA AERONAUTICA ET ASTRONAUTICA SINICA, Vol. 27, No 5, Sept. 2006, pp. 917-921.
[4] Su Shaoying, Hou Qingkai, Ren Yan, Chen Zengping. “Performance Comparison of Matched Filtering and Dechirp Pulse Compression”. Signal Processing, Vol. 27, No. 2, Feb. 2011, pp. 202-206.
[5] Hou Minsheng, Jin Mei. “Mathed filtering processing for linear FM signal”. Electronic Measurement Technology, Vol. 31, No. 8, Aug. 2008, pp. 123-125
[6] Li Chuanlong, Liu Ying. “Wideband Signal Detection Algprithm in Colored Gussian Reverberation Background”. Science Technology and Engineering, Vol. 11, No. 3, Jan. 2011, pp. 480-483