
ICEE2012 paper2 rev -...
6
Development a New Algorithm for Maximum Power Point Tracking of Partially Shaded Photovoltaic Arrays Abstract: The photovoltaic (PV) arrays exhibit a nonlinear P-V characteristic and its maximum power point (MPP) varies with solar insolation. Often, the PV arrays get shadowed completely or partially, in which the P-V characteristic get more complex with multi-local MPPs. In this condition most of former methods fails to get global MP. This paper presents a new algorithm to track global MPP under partially shaded condition. The algorithm acts by a heuristic search of array voltage to find global MPP. In the process of heuristic search, reference voltage of PV output is generated and used for perturbation. After each perturbing, results are used for better search, until achieving the convergence constraint. To check the accuracy and precision of the method an accurate model of PV array was implemented in MATLAB software and various tests were conducted. Keywords: Photovoltaic array, global maximum power point tracking, partial shading, genetic algorithm 1. Introduction Tracking the MPP of a PV array is usually an essential part of a PV system. As such, many MPP tracking (MPPT) methods have been developed and implemented. The methods vary in complexity, sensors required, convergence speed, cost, range of effectiveness, implementation hardware, popularity, and in other respects. Among the MPPT methods, the most commonly known are hill-climbing [1], fractional open-circuit voltage control [2], perturb and observe (P&O) [3], and incremental conductance (IncCond) [4]. There are lesser known, but sometimes very appropriate, methods such as maximizing load current or voltage [5], fractional short circuit current control [6], array reconfiguration [7], linear current control [8], fuzzy control [9], neural network [10], dc link capacitor droop control [11], and several others. Only one early example of each technique was given in the above list, even though we are aware of more than hundred and seventy papers on different MPPT techniques, dating from 1968. These techniques are reviewed and compared in [12]. Mentioned tracking schemes are effective and time tested under uniform solar insolation, where the P–V curve of a PV array exhibits only one MPP for a given temperature and insolation. The occurrence of partially shaded conditions being quite common (e.g., due to clouds, trees, etc.) [13], so that there is a need to develop special MPPT schemes that can track the global MPP under these conditions. Some researchers have investigated the global MPPT of PV systems in the abnormal of temperature and radiation conditions [14] - [17]. Solodovnik et al. [14] have presented a state-space-based approach for global maximum power tracking. This method is fast and accurate but is system specific, is complex, and requires more sensors. Miyatake et al. [15] introduce a method using the Fibonacci sequence to track the maximum value of global power in the event of partial shading, but the method does not guarantee tracking the maximum power for all states of partial shading. Kobayashi et al. [16] have suggested a two-stage approach to find the global maximum. In the first stage, the operating point is transmitted to vicinity of the global maximum point on the load line pm pm pm I R V = Secondly, the global optimum point is determined using the IncCond method. pm V and pm I are estimated to be 80% and 90% of the open- circuit voltage and short-circuit current, respectively. This method assumes that the first maximum after intersection of load line pm pm pm I R V = and the I-V characteristic of PV system in partial shading mode is equal with global maximum. However, If the global maximum point is located in the left of the load line ( actual pm R R > ) then IncCond method in the second stage of algorithm would not be able to determine the global maximum. H. Patel et al. [17] has designed an algorithm based on the P&O method for global maximum power tracking. This algorithm uses P&O method to track the maximum power in uniform insolation. If partial shading occurs, the crit P P Δ > Δ condition is satisfied, and the program subroutine will be called to determine the global Hamid Reza Mohajeri*, Mohsen Parsa Moghaddam**, Mahdi Shahparasti***, Mostafa Mohamadian**** * Tarbiat Modares University, [email protected] ** Tarbiat Modares University, [email protected] *** Tarbiat Modares University, [email protected] **** Tarbiat Modares University, [email protected] 489 ﻣﺘﻠﺐ ﺳﺎﯾﺖMatlabSite.com MatlabSite.com ﻣﺘﻠﺐ ﺳﺎﯾﺖ
-
Upload
trankhuong -
Category
Documents
-
view
216 -
download
4
Transcript of ICEE2012 paper2 rev -...

1 2 3 4 5 6 7 8 91011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556576061
Development a New Algorithm for Maximum Power Point Tracking of
Partially Shaded Photovoltaic Arrays
Abstract: The photovoltaic (PV) arrays exhibit a nonlinear P-V characteristic and its maximum power point (MPP) varies with solar insolation. Often, the PV arrays get shadowed completely or partially, in which the P-V characteristic get more complex with multi-local MPPs. In this condition most of former methods fails to get global MP. This paper presents a new algorithm to track global MPP under partially shaded condition. The algorithm acts by a heuristic search of array voltage to find global MPP. In the process of heuristic search, reference voltage of PV output is generated and used for perturbation. After each perturbing, results are used for better search, until achieving the convergence constraint. To check the accuracy and precision of the method an accurate model of PV array was implemented in MATLAB software and various tests were conducted.
Keywords: Photovoltaic array, global maximum power
point tracking, partial shading, genetic algorithm
1. Introduction
Tracking the MPP of a PV array is usually an
essential part of a PV system. As such, many MPP
tracking (MPPT) methods have been developed and
implemented. The methods vary in complexity, sensors
required, convergence speed, cost, range of effectiveness,
implementation hardware, popularity, and in other
respects. Among the MPPT methods, the most commonly
known are hill-climbing [1], fractional open-circuit
voltage control [2], perturb and observe (P&O) [3], and
incremental conductance (IncCond) [4]. There are lesser
known, but sometimes very appropriate, methods such as
maximizing load current or voltage [5], fractional short
circuit current control [6], array reconfiguration [7],
linear current control [8], fuzzy control [9], neural
network [10], dc link capacitor droop control [11], and
several others. Only one early example of each technique
was given in the above list, even though we are aware of
more than hundred and seventy papers on different
MPPT techniques, dating from 1968. These techniques
are reviewed and compared in [12].
Mentioned tracking schemes are effective and time
tested under uniform solar insolation, where the P–V
curve of a PV array exhibits only one MPP for a given
temperature and insolation. The occurrence of partially
shaded conditions being quite common (e.g., due to
clouds, trees, etc.) [13], so that there is a need to develop
special MPPT schemes that can track the global MPP
under these conditions.
Some researchers have investigated the global MPPT
of PV systems in the abnormal of temperature and
radiation conditions [14] - [17]. Solodovnik et al. [14]
have presented a state-space-based approach for global
maximum power tracking. This method is fast and
accurate but is system specific, is complex, and requires
more sensors. Miyatake et al. [15] introduce a method
using the Fibonacci sequence to track the maximum value
of global power in the event of partial shading, but the
method does not guarantee tracking the maximum power
for all states of partial shading. Kobayashi et al. [16]
have suggested a two-stage approach to find the global
maximum. In the first stage, the operating point is
transmitted to vicinity of the global maximum point on
the load line pmpmpm IRV = Secondly, the global optimum
point is determined using the IncCond method. pmV and
pmI are estimated to be 80% and 90% of the open-
circuit voltage and short-circuit current, respectively.
This method assumes that the first maximum after
intersection of load line pmpmpm IRV = and the I-V
characteristic of PV system in partial shading mode is
equal with global maximum. However, If the global
maximum point is located in the left of the load line
( actualpm RR > ) then IncCond method in the second stage
of algorithm would not be able to determine the global
maximum.
H. Patel et al. [17] has designed an algorithm based on
the P&O method for global maximum power tracking.
This algorithm uses P&O method to track the maximum
power in uniform insolation. If partial shading occurs,
the critPP ∆>∆ condition is satisfied, and the program
subroutine will be called to determine the global
Hamid Reza Mohajeri*, Mohsen Parsa Moghaddam**, Mahdi Shahparasti***, Mostafa Mohamadian**** * Tarbiat Modares University, [email protected]
** Tarbiat Modares University, [email protected]
*** Tarbiat Modares University, [email protected]
**** Tarbiat Modares University, [email protected]
489
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت

1 2 3 4 5 6 7 8 91011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556576061
maximum. P∆ and critP∆ stand for variation in power
and certain critical power variation values respectively.
The starting point of reference voltage is determined
using flagViVV llastmref ×∆×−= − arg . The refV , lastmV −
and arglV∆ values indicate reference voltage, voltage of
last maximum and disturbance voltage respectively. After
determining the starting point, the P&O method tracks
the local maximum points on PV characteristic one by
one from left to right in P-V curve respectively and stores
them in the memory. The algorithm ends when the first
maximum is tracked in which the maximum power output
is less than the previous maximum.
The performance of this algorithm strongly depends on
the value of arglV∆ , such that if the value of arglV∆ be
considered low, we may lose the global maximum point
while a high value of arglV∆ will increase the
convergence time (in [17] the value of arglV∆ has been
chosen relatively high to avoid the global maximum loss).
The characteristic of P-V in PV system usually has close
peaks in partial shading conditions, so the step-size value
in P&O method should be selected low enough for the
algorithm to be converging. Small step-size reduces the
speed of P&O method and when the algorithm calls the
P&O subroutine several times, reduction in speed is
more easily perceptible. As mentioned in reference [17],
the critPP ∆>∆ condition is checked every 0.1 second to
call the subroutine for tracking global maximum power in
the event of partial shading. It is noteworthy that soiling
(by for example dust) or covering with snow or damage
in some panels in a PV array can occur in the long term
(several weeks or months). While the condition of
critPP ∆>∆ is notable to distinguish this kind of partial
shading, and the algorithm will not operate properly in
that case. This paper presents a new algorithm which
uses a heuristic search for global MPPT in both normal
and partially shaded conditions. In this algorithm there is
no need to determine the time of partial shading, so that
the system don’t make mistake in time of distinguishing
partial shading.
2. Photovoltaic Array Model
One-diode and two-diode models are the models
commonly used for the PV cell. Due to the simplicity,
one-diode model has been more frequently used in
papers, while the two-diode model is much more accurate
and complete. In this paper, the two-diode model
presented in reference [18] is used for PV cell modelling
(see Fig. 1a). The complete data of solar cell and
parameters of double diode model are presented in [18],
so that there aren’t need to repeat.
Fig. 1: (a) Cell equivalent circuit (double diode model) (b) Module
equivalent circuit
By configuring pmsm NN × cells, a module is made (see
Fig. 1b). For electrical modelling of this module, values
of current source and resistors should be multiplied by
pmN and pmsm NN , respectively. If modules are
configured as shown in Fig. 2b, a PV array is made. The
point to be noted in this connection is that the modules
must be parallel with a bypass diode, and in each column
of the PV array a blocking diode should be used. After
using explained circuit model for each module, it can be
shown that the circuit in Fig. 2c is the equivalent circuit
of PV array at uniform insolation. The values of current
source and resistors are the same as values of the PV
module that is multiplied by paN and pasa NN ,
respectively.
PV cell
PV module PV array
Iarrey
Varrey
(a) (b)
Blocking Diodes
Bypass Diodes
Npa =6 and Nsa =5
Npm
D1
ID1a
Rpa Varrey
Iarrey
(c)
Blocking Diode
PV array equivalent circuit
D2
ID2a
Ipha
RsaIpha = IphNpmNpa
ID1a = ID1NpmNpa
ID2a = ID2NpmNpa
Rsa = RsNsmNsa/(NpmNpa)
Rpa = RpNsmNsa/(NpmNpa)
Fig. 2: PV array configuration. (a) PV module. (b) PV array with
bypass and blocking diodes. (c) PV array equivalent circuit
3. Genetic Algorithm
A genetic algorithm (GA) is a procedure used to find
approximate solutions to search problems through
application of the principles of evolutionary biology. The
evolutionary process of a GA is a highly simplified and
stylized simulation of the biological version. It starts from
a population of individuals randomly generated
according to some probability distribution, usually
uniform and updates this population in steps called
generations. Each generation, multiple individuals are
randomly selected from the current population based
upon some application of fitness, bred using crossover,
and modified through mutation to form a new population
[19]. The steps involved in GA are explained as follow:
1. Start: generate random population of i chromosomes
ix (i.e. suitable solution for the problem)
2. Fitness: evaluate the fitness ( )ixf of each
chromosome ix in the population.
3. New population: creating new population by repeating
following steps until the new population is complete.
490
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت

1 2 3 4 5 6 7 8 91011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556576061
(3.a) Selection: select two parent chromosomes from a
population according to their fitness (better fitness,
bigger chance to be selected)
(3.b) Crossover: a crossover probability, cross over the
parents to form new offspring. If no crossover was
performed, offspring is the exact copy of parents.
(3.c) Mutation: with a mutation probability, mutate
new offspring at each locus (position in
chromosome)
(3.d) Accepting: place new offspring in the new
population.
Fig. 3: Applying crossover and mutation
4. Replace: use new generated population for a further
run of the algorithm.
5. Test: If the condition is satisfied, stop, and return the
best solution in current population.
6. Loop: go to step2.
The proposed algorithm uses GA process for heuristic
search in MPPT simulation which complete explanation
of that is presented in following.
4. Proposed Algorithm for MPPT
The MPPT problem is a one-dimensional problem in
which the reference voltage ( refV ) for the PV array should
be assigned so that the maximum power can be tracked.
Fig. 4 shows an overview of the circuit used in MATLAB
software for simulation. In this circuit, the PV array has
been modelled according Fig. 2c and connected to a
controllable voltage source. Input reference voltage is
generated by proposed algorithm. By changing in
reference voltage value, the operation point in PV array
changes which causes variation of pvV and pvI . The pvV
and pvI is measured for using in MPPT block.
At the moment t of simulation time, voltage and
output current values of the PV systems, temperature and
radiation are used as input to the MPPT program. Then,
the MPPT program is run one time and gives the
reference voltage refV value to voltage source. The source
sets the PV voltage in refV . MATLAB software simulates
the circuit for next step time.
At ttt ∆+= , MATLAB simulation program calls the
main algorithm. After calling the main program, the
algorithm starts according flowchart of Fig. 5a. In this
algorithm, first the values of temperature, radiation and
changes in output power of PV source (pvP∆ ) are
checked. If there are changes in temperature and
radiation, or in case of partial shading, the output power
will change. In this case, there is a requirement to track
the new maximum power. Therefore, the block3 first
applies the necessary adjustments. If there is no need to a
new MPPT, then block4 checks that MPPT of the
previous call has been converged or not. If last MPPT
converged then the value of reference voltage ( refV ) well
set equal to the global optimum voltage from the previous
MPPT ( bestrefV _ ) else the algorithm should continue. Vpv, Ipv Vref = V
ref-b
est
Data center
Calculation
block
Fig. 4: Circuit used for simulations
Finding of each person’s fitness value by repeating
blocks 7, 8, 9 and 10 until this process is down for all of
persons. In block10, the fitness value of i th person is
calculated and saved. After determining the fitness value
of the i th particle, one unit is added to i . Block11,
checks whether simulations related to all persons have
been performed. If the condition is not true, algorithm
will return to simulation program else it will call new
population subroutine (see Fig. 5b). After establishing
this condition, in fact the step2 of GA algorithm has been
executed, and power output values (or fitness values) for
all the reference voltages (all persons) are obtained.
Block12 implements the steps of 3.a – 3.d in GA
algorithm and returns new population. At this step of
algorithm, the k th replicate of the program is finished.
For the next iteration, block13 checks stop condition of
MPPT. If the condition is not true, the iteration algorithm
begins the )1( +k th repeat, and the MPPT algorithm
reruns according to the mentioned procedure. Iterations
will continue until the convergence condition stops the
MPPT. If the above condition is established, the MPPT
process has been completed and the bestrefV − value will be
the voltage of maximum point.
5. Simulation Results
This section presents the simulation results of two
considered case studies with the proposed algorithm. In
first case study, at first all modules receive normal
insolation and in middle of simulation partial shading
occurs. In second case study, another array configuration
works under partial shading condition and suddenly
pattern of partial shading changes. In following more
explanation is presented.
5.1 Case Study (1)
In this section, a 20×50 modules array is considered.
Under normal circumstances, all panels are subject to
the same temperature and radiation of 2
/1000 mWE =
and CT °= 40 . At st 5.12= , some of the modules
491
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت

1 2 3 4 5 6 7 8 91011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556576061
suddenly undergo shading based on the pattern shown in
Fig. 6a. I-V and P-V curves are shown in Fig. 6b for both
uniform insolation and partial shading.
Fig. 5: The flowchart of MPPT algorithm
Simulation results of MPPT for both uniform and
partial shading conditions are shown in Fig. 7a and Fig.
7b. Result curves in Fig. 7a and Fig. 7b are divided into
two parts. In the interval [0 12.5] seconds, the uniform
insolation has been simulated and the rest of the period is
devoted to partial shading condition. As results show, the
algorithm successfully tracked global maximum shown in
Fig. 6b in both normal and partial shading condition.
Radiation and temperature change causes power
changes that lead to starting the MPPT process. A new
heuristic search is started by calling MPPT algorithm. In
initial iterations of the MPPT, value of deviations in
reference voltage is high that is because of random
generation of parents in all range of ][ ocsc VV . In later
iterations deviations become lower by converging to
maximum point. In this case study, MPPT process
completed in 19 and 20 iterations for normal and partial
shading conditions, respectively.
0 50 100 150 200 250 300 350 400 4500
1
2
3
4
5
6
7
x 104
Photovoltaic array volatge(V)
Photo
voltaic
arr
ay c
urr
ent(
A)
and p
ow
er(
W)
Global
maximum
point
P-V curve
under partially
shaded condition
I-V curve
under partially
shaded condition
I-V curve
at normal condition
This fig. shows I*100
P-V curve
at normal
condition
(b)
Fig. 6: Case study (1): (a) partially shaded PV array configuration, (b)
resultant I-V and P-V curves for the explained array
Number of iterations for specific configuration and
condition is not same for different runs. In order to more
illustration, another run has been repeated according to
the mentioned procedure. After re-implementing, the
results of Fig. 7c and Fig. 7d were obtained. The process
of reaching the maximum point in Fig. 7a and Fig. 7c is
quite different. The final value of the reference voltages
for the first and second parts of the simulation in Fig. 7a
are )(08.294 V and )(77.346 V , respectively.
Those values in Fig. 7c are )(13.294 V
and )(78.347 V , respectively. Despite the fact that the
process of reaching the maximum is different in the two
simulations, the final values are the same by little
approximation. The reason of all that is the nature of GA
algorithm is random causing different paths to reach the
optimum point in various runs, but the results for final
reference voltages will be equal with acceptable
approximation.
As simulations and structure of algorithm shows, with
a sudden change in power output of the PV system, the
algorithm is called without having to check whether
partial shading has occurred, while in previous methods
partial shading should first be checked, and in the event
of its occurrence, a separate algorithm should be
implemented. This is main feature of the presented
492
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت

1 2 3 4 5 6 7 8 91011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556576061
algorithm that the steps of the maximum power tracking
algorithm are similar for all conditions (normal mode
and partial shading).
0 5 10 15 200
100
200
300
400
500
Voltage a
cro
ss a
rray(V
)
time(s)
0 5 10 15 200
2
4
6
8x 10
4
time(s)
Pow
er
outp
ut
(W)
MPPT starts MPPT starts
shading occursMPP tracked
PART I: normal insolation PART II: partial shading
global MPP tracked
(a)
(b)
0 5 10 15 200
100
200
300
400
Voltage a
cro
ss a
rray(V
)
time(s)
0 5 10 15 20
2
4
6
x 104
time(s)
Pow
er
outp
ut
(W)
global MPP tracked
PART II: partial shadingPART I: normal insolation
(c)
MPPT starts
(d)
shading occurs
MPPT startsMPP tracked
Fig. 7: Simulation results of case study (1) for both uniform and partial shading conditions.
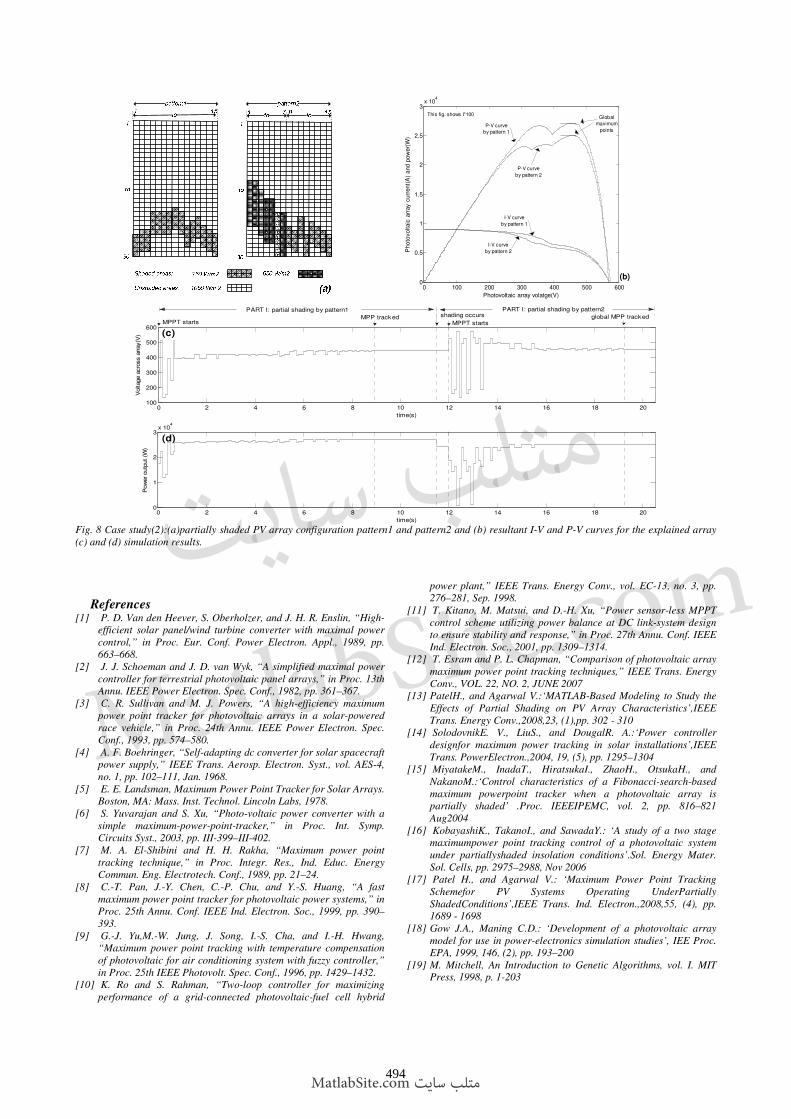
5.2 Case Study (2)
An array some time gets partially shaded which is not
a stable situation. In this condition, pattern of shading
may changes by time. For example, by passing clouds a
dynamic shading may occurs. In this case study, effects of
changing pattern of shading is illustrated. For this
purpose, an array by configuration of Fig. 8a is
considered. At first, partial shading occurs according
pattern1 then in 11.5s the pattern changes to second one.
All data of shading are given in Fig. 8a and P-V and I-V
curves for both patterns are shown in Fig. 8b.
The P-V curve for pattern1 has two peaks which the
voltage of global one is )(5.447 V . The simulation is
tracked exactly at )(63.447 VVref = as global maximum
voltage for pattern1 iterations (Fig. 8c). At 5.11=t , by
changing the pattern according to Fig. 8a the PV output
power changes suddenly and another MPPT process is
started by the algorithm. After 18 iterations,
)(95.454 VVref = is tracked as global maximum point
which accurately coincidence with P-V characteristic of
pattern shown in Fig. 8b. All the explanations and
investigations for the prior case study could be repeated
for this case.
6. Conclusion
This paper presented a new heuristic base algorithm
for MPPT in PV arrays. This algorithm not only has good
performance in uniform insolation but also in terms of
partial shading. Without any complex mathematical
calculation, the global maximum is tracked by using the
intelligence of the GA. The algorithm is simple can be
easily applicable to PV arrays with any kind of
configuration. Determining the exact time of partial
shading is difficult and in some cases impossible. One
feature of the proposed method is that it is called by
changes in PV output power. It means that the tracking
process for normal and partial shading conditions is the
same without any need to understand partial shading
occurrence.
493
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
1 2 3 4 5 6 7 8 91011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556576061
0 100 200 300 400 500 600
0
0.5
1
1.5
2
2.5
3x 10
4
Photovoltaic array volatge(V)
Pho
tovolta
ic a
rray c
urr
ent(
A)
and p
ow
er(
W)
Global
maximum
points
This fig. shows I*100
I-V curve
by pattern 2
I-V curve
by pattern 1
P-V curve
by pattern 2
P-V curve
by pattern 1
(b)
0 2 4 6 8 10 12 14 16 18 20100
200
300
400
500
600
Voltage a
cro
ss a
rray(V
)
time(s)
0 2 4 6 8 10 12 14 16 18 200
1
2
3x 10
4
time(s)
Pow
er outp
ut (W
)
MPPT startsMPPT startsglobal MPP trackedshading occurs
PART I: partial shading by pattern1
MPP tracked
PART I: partial shading by pattern2
(c)
(d)
Fig. 8 Case study(2):(a)partially shaded PV array configuration pattern1 and pattern2 and (b) resultant I-V and P-V curves for the explained array
(c) and (d) simulation results.
References
[1] P. D. Van den Heever, S. Oberholzer, and J. H. R. Enslin, “High-
efficient solar panel/wind turbine converter with maximal power
control,” in Proc. Eur. Conf. Power Electron. Appl., 1989, pp.
663–668.
[2] J. J. Schoeman and J. D. van Wyk, “A simplified maximal power
controller for terrestrial photovoltaic panel arrays,” in Proc. 13th
Annu. IEEE Power Electron. Spec. Conf., 1982, pp. 361–367.
[3] C. R. Sullivan and M. J. Powers, “A high-efficiency maximum
power point tracker for photovoltaic arrays in a solar-powered
race vehicle,” in Proc. 24th Annu. IEEE Power Electron. Spec.
Conf., 1993, pp. 574–580.
[4] A. F. Boehringer, “Self-adapting dc converter for solar spacecraft
power supply,” IEEE Trans. Aerosp. Electron. Syst., vol. AES-4,
no. 1, pp. 102–111, Jan. 1968.
[5] E. E. Landsman, Maximum Power Point Tracker for Solar Arrays.
Boston, MA: Mass. Inst. Technol. Lincoln Labs, 1978.
[6] S. Yuvarajan and S. Xu, “Photo-voltaic power converter with a
simple maximum-power-point-tracker,” in Proc. Int. Symp.
Circuits Syst., 2003, pp. III-399–III-402.
[7] M. A. El-Shibini and H. H. Rakha, “Maximum power point
tracking technique,” in Proc. Integr. Res., Ind. Educ. Energy
Commun. Eng. Electrotech. Conf., 1989, pp. 21–24.
[8] C.-T. Pan, J.-Y. Chen, C.-P. Chu, and Y.-S. Huang, “A fast
maximum power point tracker for photovoltaic power systems,” in
Proc. 25th Annu. Conf. IEEE Ind. Electron. Soc., 1999, pp. 390–
393.
[9] G.-J. Yu,M.-W. Jung, J. Song, I.-S. Cha, and I.-H. Hwang,
“Maximum power point tracking with temperature compensation
of photovoltaic for air conditioning system with fuzzy controller,”
in Proc. 25th IEEE Photovolt. Spec. Conf., 1996, pp. 1429–1432.
[10] K. Ro and S. Rahman, “Two-loop controller for maximizing
performance of a grid-connected photovoltaic-fuel cell hybrid
power plant,” IEEE Trans. Energy Conv., vol. EC-13, no. 3, pp.
276–281, Sep. 1998.
[11] T. Kitano, M. Matsui, and D.-H. Xu, “Power sensor-less MPPT
control scheme utilizing power balance at DC link-system design
to ensure stability and response,” in Proc. 27th Annu. Conf. IEEE
Ind. Electron. Soc., 2001, pp. 1309–1314.
[12] T. Esram and P. L. Chapman, “Comparison of photovoltaic array
maximum power point tracking techniques,” IEEE Trans. Energy
Conv., VOL. 22, NO. 2, JUNE 2007
[13] PatelH., and Agarwal V.:‘MATLAB-Based Modeling to Study the
Effects of Partial Shading on PV Array Characteristics’,IEEE
Trans. Energy Conv.,2008,23, (1),pp. 302 - 310
[14] SolodovnikE. V., LiuS., and DougalR. A.:‘Power controller
designfor maximum power tracking in solar installations’,IEEE
Trans. PowerElectron.,2004, 19, (5), pp. 1295–1304
[15] MiyatakeM., InadaT., HiratsukaI., ZhaoH., OtsukaH., and
NakanoM.:‘Control characteristics of a Fibonacci-search-based
maximum powerpoint tracker when a photovoltaic array is
partially shaded’ .Proc. IEEEIPEMC, vol. 2, pp. 816–821
Aug2004
[16] KobayashiK., TakanoI., and SawadaY.: ‘A study of a two stage
maximumpower point tracking control of a photovoltaic system
under partiallyshaded insolation conditions’.Sol. Energy Mater.
Sol. Cells, pp. 2975–2988, Nov 2006
[17] Patel H., and Agarwal V.: ‘Maximum Power Point Tracking
Schemefor PV Systems Operating UnderPartially
ShadedConditions’,IEEE Trans. Ind. Electron.,2008,55, (4), pp.
1689 - 1698
[18] Gow J.A., Maning C.D.: ‘Development of a photovoltaic array
model for use in power-electronics simulation studies’, IEE Proc.
EPA, 1999, 146, (2), pp. 193–200
[19] M. Mitchell, An Introduction to Genetic Algorithms, vol. I. MIT
Press, 1998, p. 1-203
494
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت


















