I momenti angolari e lo spin: proprietà - home page ... · Per usare una notazione generale, sarà...
59
1 I momenti angolari e lo spin: proprietà
Transcript of I momenti angolari e lo spin: proprietà - home page ... · Per usare una notazione generale, sarà...

1
I momenti angolari e lo spin: proprietà

2
Spettroscopie Magnetiche: NMR ed EPR
NMR = Nuclear Magnetic ResonanceEPR = Electron Paramagnetic Resonance (Electron Spin resonance ESR)
Si basano sulla interazione della radiazione elettromagnetica (componente di campo magnetico) con i dipoli magnetici associati allo spin nucleare I ed allo spin elettronico S.
nuclei
elettroni
I
Sr
r
∝
∝
µµ
Lo Spin delle particelle elementari possiede le pro prietà quantistiche di un momento angolare.

3
I momenti angolari
( )θsinmrvL
vmr
prL
=
∧=∧=
r
vr
rrrIl momento angolare è definito in meccanica classica da:
r
vL
θθθθm
Dove p è il momento lineare (quantità di moto). Il momento angolare si esprime in Kg m2 s-1 (nel SI)
Il momento angolare di un sistema meccanico è costante nel tempo se è nullo ilmomento delle forze che agiscono sul sistema. In presenza di una forza cheagisce sul sistema, il momento angolare cambia :
Γ=∧=vrr
r
Frdt
Ld

4
Il prodotto vettoriale prLrrr
∧=
può essere espanso nelle componenti cartesiane
( ) ( ) ( )xyzxyz
zyx
ypxpkxpzpjzpypi
ppp
zyx
kji
L
−+−+−=
=
)
r
ˆˆ
ˆˆˆ
xyzzxyyzx ypxpLxpzpLzpypL −=−=−=
Cioè

5
In meccanica quantistica, alle grandezze fisiche si associano operatori.
⋅=⋅=⋅= zzyyxx)))
Gli operatori collegati alla posizione (coordinate x,y,z) sono semplicemente la moltiplicazione per la coordinata corrispondente:
L’operatore del momento lineare (operatore vettoriale) è:
∇−=)
h)
ip
dovez
ky
jx
i∂∂+
∂∂+
∂∂=∇ ˆˆˆ)
Quindi le componenti dell’operatore vettoriale del momento angolare L sono:
∂∂−
∂∂−=
∂∂−
∂∂−=
∂∂−
∂∂−=
xy
yxiL
zx
xziL
yz
zyiL zyx h
)h
)h
)

6
Un ltro operatore importante è Il quadrato dell’operatore di momento angolare, L2, definito come somma dei quadrati delle tre componenti:
2222zyx LLLL))))
++=
Gli operatori fondamentali di momento angolare sono :
, , , 2zyx LLLL))))
Per usare una notazione generale, sarà usato il simbolo J per un momento angolare generico:
2zyx JJJJ))))

7
Le proprietà di commutazione dei momenti angolari sono:
Principio della M.Q.: Se due operatori commutano, hanno autostati comuni .
[ ] 0, =−= ABBABA))))))
ψψψψ
bB
aA
=
=)
)
[ ] [ ] [ ] 0,,, 222 === zyx JJJJJJ))))))
Principio di indeterminazione: se due operatori NON commutano, nonpossono essere determinati simultaneamente con precision e infinita.
[ ] [ ] [ ] yzxxzyzyx JiJJJiJJJiJJ)))))))))
−=== , , ,
si possono determinare simultaneamente gli autovalori di J2 e una qualsiasi componente di J.
NON si possono determinare simultaneamente due componenti di J.

8
Le autofunzioni comuni a J2 e Jz definiscono i loro autovalori:
ψψψψ
mJ
jjJ
z h)
h)
=
+= )1(22
Definizione generale di momento angolare in meccanic a quantistica :
un operatore vettoriale che soddisfa le relazioni di commutazione precedenti è un momento angolare.
Data una direzione scelta (es: z) si può conoscere il modulo del momento:
)1( += jjJ h
E la sua proiezione lungo z:
mJz h=
NON si possono conoscere anche Jx o Jy
jjjm −−++= ,....,1,

9
Notazione di Dirac (bra-ket):
Uno stato viene rappresentato da un simbolo “ket” scritto come |n>. Unaautofunzione Ψn di un operatore O viene descritta da un ket nel quale si indicauna etichetta, di solito un numero quantico. Es:
nonOoO
n
nnnn
n
=→Ψ=Ψ
≡Ψ))
Il simbolo “bra” <n| serve per esprimere il complesso coniugato del ket. Ad es: il prodotto scalare tra due funzioni cioè l’integrale del prodotto delle funzioni si scrive:
kjdkj ≡ΨΨ∫ τ*

10
Quindi ad esempio, per funzioni ortogonali tra loro:
0=kj
per funzioni normalizzate:
1=kk
Un elemento di operatore (elemento di matrice) è rappresentabile in notazione bra-ket come:
jkkj OkOjdO =≡ΨΨ∫))
τ*
Ad es: il valore di aspettazione di un operatore, per un sistema in uno stato Ψk è:
kkkk OkOkdOO =≡ΨΨ= ∫)))
τ*

11
Valgono le seguenti relazioni:
*jkkj =
*
*
kjjk OO
jOkkOj))
))
=
=Definizione di operatore Hermitiano

12
jmmjmJ
jmjjjmJ
z ,,
,)1(, 22
h)
h)
=
+=
Dove J è il numero quantico di momento angolare e m può assumere 2j+1 valori pari a:
jjjm −−++= ,....,1,
Oltre agli operatori J2 e Ji (i=x,y,z), sono utili gli operatori scaletta (shift operators):
yxyx JiJJJiJJ))))))
−=+= −+
Con le relazioni inverse:
i
JJJ
JJJ yx 2
2
−+−+ −=+=))
)))
)
Nella notazione di Dirac (bra-ket) le autofunzioni di J2 e Jz sono :

13
L’effetto degli operatori scaletta è:
( ) ( )
( ) ( ) jmmmjjjmJ
jmmmjjjmJ
,1 11,
,1 11,
−−−+=
++−+=
−
+
)
)
Cioè gli operatori di shift fanno cambiare lo stato aumentando o diminuendo di ±1 il valore del numero quantico m.
( ) ( )( ) ( ) 1,021,0 1111111,1
01,11 1111111,1
=−−+=
=++−+=
−
+
J
J)
)
1,11,1
1,121,1 22
h)
h)
=
=
zJ
JEsempio: stato con J=1 e m=1
14
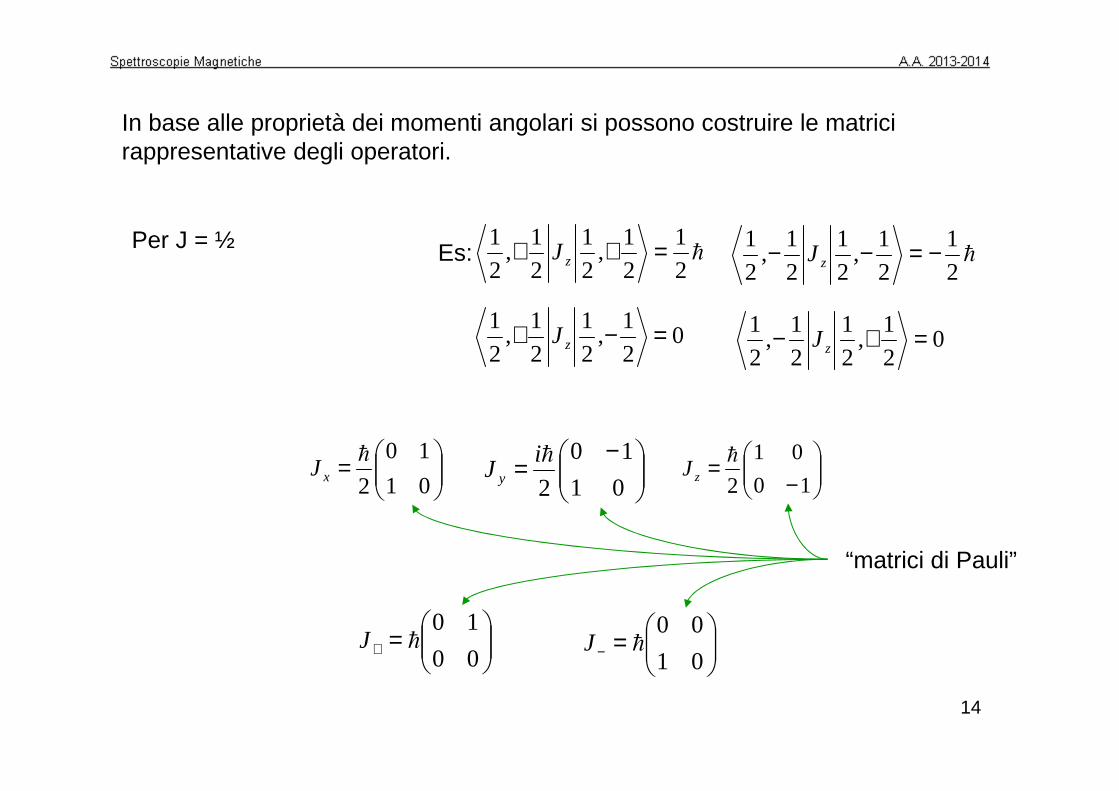
In base alle proprietà dei momenti angolari si possono costruire le matrici rappresentative degli operatori.
−=
10
01
2
hzJ
Per J = ½
=01
10
2
hxJ
−=
01
10
2
hiJ y
=+ 00
10hJ
=− 01
00hJ
h2
1
2
1,
2
1
2
1,
2
1 =++ zJEs: h2
1
2
1,
2
1
2
1,
2
1 −=−− zJ
“matrici di Pauli”
02
1,
2
1
2
1,
2
1 =−+ zJ 02
1,
2
1
2
1,
2
1 =+− zJ

15
Per J = 1
=010
101
010
2
hxJ
h11,11,1 =++ zJEs: 00,10,1 =zJ
−−
=00
0
00
2i
ii
i
J y
h
−=
100
000
001
2
hzJ
=+
000
100
010
2hJ
=+
010
001
000
2hJ

16
Il momento angolare orbitale (dipende dalle coordinate spaziali) ammette solo valori interi per il numero quantico j.
Le autofunzioni degli operatori di momento angolare sono le stesse del rotatore sferico, cioè le armoniche sferiche Ylm(θ,φ).
Spesso per i momenti angolari orbitali si usano i numeri quantici l ed ml.
( )ϕϑ,, ,mll Yml =
con l = 0,1,2,3,… e ml= l, l-1,…,-l

17
Uhlenbeck e Goudsmit nel 1925 ipotizzarono che l’elettrone sia dotato di unaproprietà di momento angolare intrinseco , detto SPIN con valore semi-interodel numero quantico.
Per lo spin valgono le regole di commutazione e quindi tutte le proprietà dei momenti angolari. I numeri quantici per lo spin elettronico solitamente si indicano con S ed mS:
)1( += SSS hsz mS h= SSSms −−= ,...,1,

18
Per un singolo elettrone vale S=1/2. Le autofunzioni di spin sono etichettatecome α e β per indicare rispettivamente l’autovalore +1/2 e -1/2 dell’operatore diproiezione del momento (es. Sz)
βββ
ααα
hh
hh
4
31
2
1
2
1
4
31
2
1
2
1
2
2
=
+=
=
+=
S
S
ββ
αα
2
2h
h
−=
=
z
z
S
S
βαβ
αβα
==
==
−−
++
SS
SS
0
0

19
Anche altre particelle quali i nuclei , sono dotate di spin, che può essere intero o semintero. Lo spin nucleare viene indicato con il numero quantico I.
)1( += III h
Iz mI h=
I,...,I,ImI −−= 1
Numero di protoni
Numero di neutroni
I
pari pari 0
dispari dispari Intero (1,2,3..)
pari dispari Semi-intero
(1/2,3/2,..)
dispari pari Semi-intero
(1/2,3/2,..)

20
Allo spin (indicato genericamente con J) delle particelle cariche è associato anche un momento magnetico, proporzionale allo spin:
Jµ γ=Dove γ è detto Fattore Giromagnetico (o magnetogirico)
Per una massa m con carica q in rotazione attorno all’origine si può calcolare γ
Jm
q
mvrm
qr
r
vqr
T
qAI
2
2
2 22
=
=⋅=⋅=⋅= ππ
πµ
m,q v
r
Nel caso di particelle con spin, questa formula “classica” viene corretta introducendo un fattore correttivo g
µ= momento magnetico, I = corrente, A = area, m = massa, q = carica, v = velocità,T = periodo della rotazione, J = momento angolare
ω

21
Spin elettronico : numero quantico S
)1( += SSS h sz mS h= SSSms −−= ,...,1,
Momento magnetico elettronico: antiparallelo al momento angolare
S
S
Sµ
e
B
eee
g
m
eg
γµ
=−=
−=2
h
124
31-
34
JT10274.9 Bohrdi magnetone 2
kg10 9.109 elettronedell'massa
2.0023elettronedell' g fattore
sJ10054.1 Planck di costante
−−
−
×==
×==
==⋅×==
eB
e
e
m
e
m
g
h
h
µ
ge = 2.0023 fattore g dell’elettrone libero.
g ≠ ge in generale γe < 0

22
Spin nucleare: numero quantico I
)1( += III h Iz mI h= IIImI −−= ,...,1,
I
I
Iµ
γµ
==
=
nN
pNN
g
m
eg
2
h
)T(s nucleareicogiromagnet fattore
JT10050.5nucleare magnetone 2
kg10 67.1 protone delmassa
nucleare g fattore
sJ10054.1ridotta Planck di costante
11
127
27-
34
−−
−−
−
=
×==
×==
=⋅×==
m
e
m
g
pn
p
N
γ
µ h
h
Momento magnetico nucleare: parallelo/antiparallelo al momento angolare
γN < 0 ma anche γN > 0
23
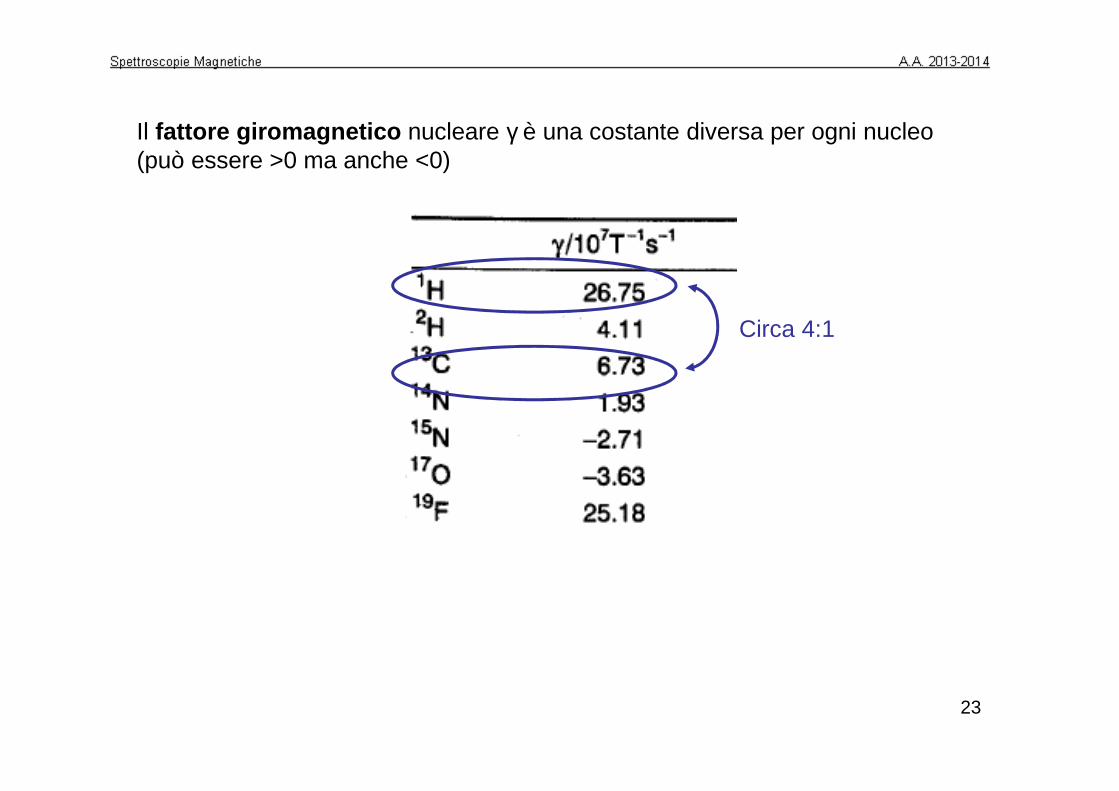
Il fattore giromagnetico nucleare γ è una costante diversa per ogni nucleo (può essere >0 ma anche <0)
Circa 4:1

24
Interazione Zeeman tra un momento magnetico µµµµ e un campo magnetico B0
0Bµ ⋅−=E
Dove l’operatore J può riferirsi allo spin elettronico o nucleare. Se si definisce la direzione del campo B0 come la direzione z:
In quantomeccanica l’energia corrisponde all’operatore Hamiltoniano
0B⋅−= JH))
γ
zze SBgH))
µ=
Le energie sono :
zseem BmgEs
µ=
zznn IBgH))
µ−=
zIm BmEI
hγ−=
elettroni
elettroni
nuclei
nuclei

25
0
0
2
1
2
1
BgE
BgE
Be
Be
µ
µ
β
α
−=
+=
Quindi per uno spin Elettronico S=1/2 in un campo magnetico B0
∆E
Energia
Campo magnetico B0
ms=+1/2
ms=-1/2
α
β

26
Per uno spin Nucleare I=1/2 (con γ>0) in un campo magnetico B0
0
0
2
1
2
1
BE
BE
h
h
γ
γ
α
β
−=
+=
∆E
Energia
Campo magnetico B0
ms=-1/2
ms=+1/2 α
β

27
La separazione in energia è ∆E. Una transizione spettroscopica tra due livelli di spin in un campo magnetico è possibile se:
hvE =∆
0BhvE hγ==∆
0BghvE eµ==∆elettroni
nuclei
0Bh
gv eµ=
02Bv
πγ=
“FREQUENZA DI RISONANZA”

28
Alcuni valori tipici di campi magnetici usati in NMR o EPR e rispettive frequenze di risonanza:
NMR
B0=4.7 T, nucleo di idrogeno 1H (γ=26.75×107 Hz/T)
MHz2002 0 ≈= Bv H
H πγ
B0=4.7 T, nucleo di carbonio 13C (γ=6.73×107 Hz/T)
MHz3.502 0 ≈= Bv c
C πγ Radiofrequenze
B0=14 T, nucleo di idrogeno 1H (γ=26.75×107 Hz/T)
MHz6002 0 ≈= Bv H
H πγ

29
NMR

30
Alcuni valori tipici di campi magnetici usati in NMR o EPR e rispettive frequenze di risonanza:
EPR B0=0.35 T (= 3500 gauss) g=ge
GHz 100 ≈= Bh
gv eµ
B0=4.7 T (come per NMR) g=ge
GHz 1300 ≈= Bh
gv eµ
Microonde

31
Transizioni di dipolo magnetico: Le transizioni tra livelli di spin sono indotte dalla componente magnetica dellaradiazione Affinchè avvenga la transizione il momento di transizione deve esserediverso da zero
( ) )(' ttH Bµ ⋅−=) ( ) ( )tBtB ωcos1
rr=
Dove l’Hamiltoniano dipendente dal tempo H’(t) è
( ) 0' 1221 ≠ΨΨ= tHµ
E le funzioni Ψ sono le autofunzioni di spin (nucleare od elettronico)
Regole di selezione per transizioni tra livelli di spin

32
Nel caso di uno spin elettronico S=½ il momento di transizione:
( ) 0' ≠= βαµαβ tH
( ) ( ) ( ) ( )( )tBtBtBtH zzyyxx 111' µµµ ))))++−=
ze
ez
ye
ey
xe
ex
Sm
eg
Sm
eg
Sm
eg
)h)
)h)
)h)
2
2
2
−=
−=
−=
µ
µ
µ
Sviluppando i termini dell’Hamiltoniano
Le componenti dell’operatore momento magnetico si possono esprimere in funzione degli operatori di spin:

33
( ) [ ]
[ ]βαβαβα
βαβα
zzyyxxe
e
zzyyxxe
e
BSBSBSm
eg
BSBSBSm
egtH
111
111
2
2'
)))h
)))h
++=
++=Quindi:
L’ultimo termine:
011 == βαβα zzzz SBBS)) Un campo oscillante con B1
parallelo al campo statico B0 (quiassumiamo che B0//z) non inducetransizioni di spin !
Gli altri termini, ad es:
[ ][ ]
0 2
1
02
12
1
1
1
11
≠=
+=
+= −+
x
x
xxx
B
B
SSBBS
αα
βαβαβα)))
βαβαβα
==
==
+=
−−
++
−+
SS
SS
SSSx
0
02
)

34
Analogamente, per il termine delle componenti y:
0 2
111 ≠= yyy BBS βα
)
Quindi solo le componenti oscillanti ORTOGONALI al campo B0 possono indurretransizioni tra gli spin.
Inoltre le transizioni possibili sono solo tra stati di spin con:
1±=∆ sm
1±=∆ Im
Spin elettronici
Spin nucleari
REGOLE DI SELEZIONE per le transizioni di dipolo magnetico
(la dimostrazione deriva dal fatto che gli operatori S+ ed S- fanno fare salti di 1 unitànei valori dei numeri quantici m )

35
Descrizione vettoriale dell’esperimento di risonanza magnetica

36
Moto di un momento magnetico in campo magnetico.
Un momento magnetico (associato ad un momento angolare) in un campo magnetico è soggetto ad una forza che tende a riallinearlo al Campo. Questa forza (momento torcente) fa variare il momento angolare:
dt
dJ=∧= 0BΓ µ
Il momento magneticoè proporzionale almomento angolare (lo spin):
Jγµ =Se si moltiplicano ambo i membri per γ
0Bγµµ ∧=dt
d
x
y
z
B0µµµµ
ΓΓΓΓ

37
Per risolvere questa equazione, è utile considerare un sistema di riferimento rotante.
z’ coincide con zx’ e y’ ruotano con velocità ω
x
y
z
x’
y’
z’
ω
Si può ricavare che, per un vettore v generico, la trasformazioni nel sistema d’assi rotanti implica:
vt
v
dt
dv ∧+= ωδδ
x,y,z “sistema di laboratorio” (assi fissi)x’,y’,z’ “sistema rotante” (assi rotanti)
Variazione di v nel sistema di laboratorio Variazione di v nel sistema
rotante

38
Usando la precedente relazione nel caso dell’equazione sul momento magnetico
Bγµµ ∧=dt
d
Bγµµωδδµ ∧=∧+
t
Cioe’, esplicitando la derivata di µ rispetto al sistema rotante:
)( Bγωµδδµ +∧=
t
Questa equazione è equivalente alla equazione nel sistema fisso, purchè si sostituisca il campo magnetico B con un campo effettivo Beff=(B+ω/γ)
B+=γω
effB
Nel sistema di laboratorio

39
La soluzione della equazione del moto del momento magnetico nel sistema rotante è semplice se si assume Beff=0, cioè se
Bω γ−=
In questa situazione 0=tδ
δµ
Cioè µµµµ è statico sistema rotante. Rispetto al sistema fisso quindi µµµµ ruota alla velocità ω=-γB
Bω γ−=0Questa frequenza è detta Frequenza di Larmor
Bπγν20 −=
Che è pari alla frequenza di risonanza tra due stati stati di spin con ∆m=±1

40
Si determina il moto di µ anche risolvendo l’equazione delle tre componenti del momento magnetico (notare che Bx=By=0, Bz≠0):
zdt
dBγµµ ∧=
=
−=
=
0dt
ddt
ddt
d
z
zxy
zyx
µ
γµµ
γµµ
B
B
Le cui soluzioni sono: ( )( )
==
=
t
t
t
yy
xx
zz
0
0
sin)0(
cos)0(
)0()(
ωµµωµµ
µµzBγω =0

41
Il moto è una “Precessione” intorno alla direzione del campo (in questo caso B//z), alla frequenza di Larmor ω0=-γB
y
z
B0
µµµµ
x
γ>0 (caso di 1H o 13C) la direzione di ω0 è opposta a B0
y
z
B0
µµµµ
x
γ<0 (caso di elettroni) la direzione di ω0 è la stessa di B0

42
Un campione macroscopico contiene un numero elevato di momenti magnetici elementari (dati dagli spin nucleari o elettronici). Il vettore magnetizzazione è dato dal momento di dipolo magnetico totale per unità di volume
Vi∑=
µM
All’equilibrio:0
0
≠
==
z
yx
M
MM
Quindi 0BM // y
B0
M
x
z

43
La componente Mz è diversa da zero a causa della diversa popolazione deglistati di spin paralleli o antiparalleli al campo.
Es: per S=1/2 vi è un eccesso di spin β rispetto agli spin α
Nβ
Nα
Energia
α
β

44
Le componenti Mx ed My sono nulle all’equilibrio perchè i singoli spin hanno fasestatisticamente distribuita: la somma delle componenti x ed y si annulla.
y
B0
x
z
0== yx MM

45
Il vettore magnetizzazione in un campo magnetico segue la legge del moto di unmomento magnetico:
0BMM γ∧=dt
d
Quindi M è soggetta ad un moto di precessione alla frequenza di Larmor.
( )( )tω)(MM
tω)(MM
)(M(t)M
yy
xx
zz
0
0
sin0
cos0
0
==
=
00 γBω −=

46
Se si perturba la situazione di equilibrio, ad esempio partendo da B0=0 eaccendendo al tempo t=0 il campo magnetico
A t=0 è B0=0 e la Magnetizzazione è nulla 0=== xyx MMM
tempo
Mz
( )1
0
T
MM
dt
dM zzz −−=
T1 è detto il tempo di rilassamento Longitudinale (o tempo di rilassamento spin-reticolo)
A t>0 è B0≠0 e Mz tende al valore di equilibrio Mz
0 con la legge:
−=
−110 T
t
zz eMM
Da cui
B

47
Se invece vi sono componenti x,y della magnetizzazione non nulle:
0
0
≠≠
y
x
M
M
Il sistema si porta all’equilibrio annullando le componenti Mx e My , secondo le:
22
T
M
dt
dM
T
M
dt
dM yyxx −=−=
Il tempo caratteristico T2 viene detto tempo di rilassamento trasversale (o tempo di rilassamento spin-spin)
Da cui
0
0 22 T
t
yyT
t
xx eMMeMM−−
==

48
Il tempo T1 si riferisce a processi che tendono a ripristinare l’equilibrio termico,con le popolazioni di Boltzmann tra gli stati di spin
Il tempo T2 si riferisce a processi che tendono a disordinare la fase dei singolispin e non dipendono da scambi di energia con l’ambiente che circonda gli spin
Esiste il seguente vincolo tra i due tempi di rilassamento:
21 TT ≥

49
Le equazioni del moto della magnetizzazione in presenza dei rilassamenti sonoquindi:
−=
−−=
−=
1
0
2
2
T
MM
dt
dM
T
MM
dt
dM
T
MM
dt
dM
zzz
yzx
y
xzy
x
B
B
γ
γ

50
Cosa cambia nel moto della Magnetizzazione in presenza di una radiazioneelettromagnetica?
La radiazione ha una componente magnetica B1 oscillante lungo una direzioneortogonale a B0//z, ad esempio lungo x
( ) ( )tBitB ωcosˆ11 =
r
Una radiazionelinearmente polarizzatapuò essere descrittacome somma di dueradiazioni circolarmentepolarizzate con senso dirotazione opposto

51
Quindi la radiazione può essere descritta da:
( ) ( ) ( )tBjtBitB ωω sinˆcosˆ111 +=
r
xB1 yB1
( ) ( )1
0
20 T
MM
T
M
dt
d zz −+−+∧= ⊥1BBM
M
Il moto della Magnetizzazione in presenza del campo statico e della radiazione, è definito dalla equazione

52
Le equazioni per le singole componenti della magnetizzazione sono le
Equazioni di Bloch
( )
( )
( ) ( )
−−−−=
−+−=
−+=
1
0
11
210
210
cossin
cos
sin
T
MMtBMtBM
dt
dM
T
MtBMBM
dt
dM
T
MtBMBM
dt
dM
zzyx
z
yzx
y
xzy
x
ωγωγ
ωγγ
ωγγ
Queste equazioni possono essere risolte per fornire i valori di Mx, My,Mz.Risulta però conveniente ricorrere al sistema di riferimento rotante.

53
Supponiamo di avere la magnetizzazione derivante da spin nucleari: il verso diprecessione della magnetizzazione è x→ -y → -x → y. Si considera lacomponente della radiazione che ruota nella stessa direzione (B1
-)
In un sistema rotante alla stessa velocità angolare ω della radiazione, lacomponente B1 è statica

54
Nel sistema rotante quindi il moto della magnetizzazione è descritto da:
( )1
0
20
''
'
T
MM
T
M
dt
d zz −+−
++∧= ⊥1BBM
Mγωγ
La Magnetizzazione nel sistema rotante risente di un campo efficace pari a
1BBBeff ++= 0γω
0Bγω −=Se 1BBeff =allora
In questo caso La Magnetizzazione nel sistema rotante risente di un campoefficace pari a B1

55
Le equazioni di Bloch nel sistema rotante si semplificano:
( )
( )
−+−=
−++=
−+=
1
0
1
201
20
'
''
'
''
'
T
MMBM
dt
dM
T
MMBM'
dt
dM
T
MM
dt
dM
zzy
z
yxz
y
xy
x
γ
ωωγ
ωω
La soluzione del caso stazionario, quando non si ha variazione di M nel sistemarotante, (“slow passage conditions”) è:
0'' ===
dt
dM
dt
dM
dt
dM zyx
00 Bγω =

56
Le componenti di M’ nel caso stazionario sono:
( )( )
( )
( )( ) 1
22
21
21
220
22
20
220
22
21
21
220
22
210
22
21
21
220
22
02
210
1
1'
1'
1'
TTBT
TMM
TTBT
TBMM
TTBT
TBMM
zz
zy
zx
γωωωω
γωωγ
γωωωωγ
+−+−+=
+−+=
+−+−=

57
In condizioni ordinarie si opera con intensità di radiazione bassa, quindi
122
21
21
2 <<TTBγ condizioni di non saturazione
In questa condizione le equazioni si semplificano:
( )( )
( )0
20
22
210
20
22
02
210
'
1'
1'
zz
zy
zx
MM
T
TBMM
T
TBMM
=
−+=
−+−=
ωωγ
ωωωωγ

58
La componente M’y “ fuori fase di 90°” con la radiazione èuna funzione Lorenziana
E viene detta componente diassorbimento
0
2
ωω −=+
=
xcxb
ay
La componente M’x “in fase” con laradiazione è la componente indispersione
( )( )2
02
2
02
210
1'
ωωωωγ
−+−=
T
TBMM zx
( )20
22
210
1'
ωωγ
−+=
T
TBMM zy

59
La componente M’y “fuori fase” con la radiazione è legata all’assorbimento dipotenza della radiazione ed è la curva che viene rivelata in un esperimentospettroscopico convenzionale
In risonanza magnetica la strumentazione è costruita per rivelare lacomponente della magnetizzazione trasversale , sia la parte di assorbimentoche la parte dispersiva
assorbimento dispersione