
I : iiC $E FiLE COPY
152
NASA NASA CR-2501 0 I z :_ii C_$E FiLE COPY FLIGHT CONTROL SYSTEMS PROPERTIES AND PROBLEMS Volume II- Block Diagram Comp-endium Donald E. Johnston = Prepared by SYSTEMS TECHNOLOGY, INC. Hawthorne, Calif. 90250 for Flight Research Center r_'2.6_191ro NATIONAL AERONAUTICS AND SPACE ADMINISTR_TIOH * WASHINGTON, D. C. • FEBRUARY 1975 https://ntrs.nasa.gov/search.jsp?R=19750009300 2020-03-22T23:09:30+00:00Z
Transcript of I : iiC $E FiLE COPY

NASA NASA CR-2501
0
I
z
:_iiC_$E FiLECOPY
FLIGHT CONTROL SYSTEMS
PROPERTIES AND PROBLEMS
Volume II- Block Diagram Comp-endium
Donald E. Johnston
=
Prepared by
SYSTEMS TECHNOLOGY, INC.
Hawthorne, Calif. 90250
for Flight Research Centerr_'2.6_191ro
NATIONAL AERONAUTICS AND SPACE ADMINISTR_TIOH * WASHINGTON, D. C. • FEBRUARY 1975
https://ntrs.nasa.gov/search.jsp?R=19750009300 2020-03-22T23:09:30+00:00Z


1. Report No. -I 2. Government Accession No. 3.
INASA CR-2501
4. Title and Subtitle 5.
FLIGHT CONTROL SYSTEMS PROPERTIES AND PROBLEMS
Volume II -- Block Diagram Compendium 6.
7. Author(s) 8.
Donald E. Johnston
10.
9. Performing Organization Name and Address
Systems Technology, Inc. 11.Hawthorne, California 90250
12. Sponsoring Agency Name and Address
National Aeronautics and Space Administration
Washington, D.C. 20546
Reciplent's Catalog No.
=, L,
Report Date
February 1975
Performing Organization Code
H-860
Performing Organization Report No.
TR-1018-1
Work Unit No.
Contract or Grant No.
NAS 4-1881
"13. Type of Report and Period Covered
Contractor Report - Final
14. Sponsoring Agency Code
15, Supplementary Notes
NASA Technical Monitor: Herman A. Rediess, NASA Flight Research Center
16, Abstract
The purpose of this program was to document and pass
on experience to current and future generations of flight
control engineers, hopefully, to prevent costly rediscovery
of past mistakes and to stimulate trade studies between
possible competing mechanizational approaches.
The documentation is divided into two volumes. Vol-
ume I (NASA CR-2500) contains the technical discussion
while this volume is a compendium of stability augmenta-
tion system and autopilot block diagrams and descriptive
material for 48 different types of aircraft. These provide
a broad representation of the many mechanizational
approaches which have been employed in the past.
17. Key Words {Sugg_ted by Author(s))
Aircral't control systems
Systems design
18. Distribution Statement
Unclassified- Unlimited
Category: _dS, _
19. Security Classif. (of this report) 20. Security Classif. (of this page) 21. No. of Pages
Unclassified Unclassified 149
22. Price*
$5.75
*For sale by the National Technical Information Service, Springfield, Virginia 22151


I. INTRODUCTION
II. BLOCK DIAGRAMS.
III. REFERENCES
TABLE OF CONTENTS
Pag.__e
I
2
139
iii


SECTIONI
INTRODUCTION
This volume contains a compendiumof 8ASand autopilot block diagramsfor some48 attack, bomber, cargo, drone, fighter, research, and transporttype aircraft. It also contains references to specific documentsfromwhich information was gleaned for this study.
This compendiumincorporates and expandsupon an earlier effort (Ref. 67)
initiated by the A-18 AerospaceControl and GuidanceSystemsCommitteeof theSociety of Automotive Engineers. It is by no meansa complete expositionof systemspast and present. There are manysystemsfor which no informa-tion was available, and there are others for which the information availablewas incomplete or conflicting, and therefore not included here.
An initial attempt wasmadeto put all block diagrams into a consistentformat which identified functional blocks and associated transfer charac-
teristics, functional switching, etc. However, it rapidly becameapparentthat such a task wasbeyondthe scope of this program. Therefore in mostinstances the diagramspresented here have been reproduced directly fromthe original documentslisted in the references. In all probabilitythey reflect but one version of systemswhich mayhave undergoneseveralmodifications. Consequently, additions or revisions are solicited fromthose whomakeuse of these volumes.

AIR_
A3J- I
A-4
A-7A
B-pC
B-98
B-66
XB-70
C-5A
KC- ]39
XC- 142A
E-1B
S- 2D/S- 2E
Regulus II
¢,-2C
BQ,M-34
MO,_I-74A
F3H
F-4
F-8D
F-14
F-86
F-89
F- IOOD/F
F- I01A
F- I01B
F-I02
F-I09A
F- 106
F-111
T-38
AVRO CF- I00
_ECTION II
_L0CK DIAGRAMS
2
Pages
4-8
9-11
12-14
19-19
20-29
3o
31-33
34-49
46
47-49
90-91
92-53
54
99-96
57-98
59-6O
61-63
64
69
66
67
68-69
7o-72
73
74-77
78
79-81
82-83
84-87
88
89
Ref. No.
9
I
9, I0
II, 32
67
12
16, 17, 19
67
18, 20
too
too
22
24, 31
25, 26, 33
27
67
34
3
37
38, 67
41, 42, 67
43, 67
43, 44, 67
49, 46
67
67
93-55
99
67

AIR_
Fiat G-91Viggen (AJ-37)VJI01-CM2-F2
X-15B-707DC-8L- 188
R/D SYSTEMSGESAC
HoneywellAdaptableSFCS
NASAF9F-2TWEADI
TWEADII
AVRO-707CLear Rate Integrating
9O91-9596
9798-1oo
101-103
I04-Io6
1o7-110
111-113
114-118
119-124
125-128
129-13o
131-134
135-137
138
Ref. No.
67
58
61
62
64, 69
67
81
67
88, 89
35
9O
69-73
74, 75
78
79
67

i .........
STICK
r ...... 1
MECHANICAL CONTROL _ SOLENOID L _ -- _ -._, . MECH_,NICAL FEEDBJ_CKr- - ! CLUTCH I
I I-..... .I __._
l l Aj,4S_rI.IIC't_ ACTUATOR
IUNC._E _ -1 ACIUATOR FEEDBACK
L (ELEC1RICAL ) eLECTRICAL)
M_CH TrIM SYNCHRO :
I $TORIr | JECTION
COMPENSATION I
AUTOFLIGHTCONTROL
i
ICOMPUTER
MECHANICAL FEEDBACK
AClUA, T(_
AND VALVES
ELECTRICAL
LATER._L TRIM
ACTIJ_TOR
HYD f DIFF. PRESS,. --)- BALANCER
IRANSDUC[R
SERIES (SERVO I
AJ_PLIFIERSERVO VALVE _ SERIES (SERVO]
ACTUATOR
- i S'ERIES ACTUA'TOR l _-
POSITION
| TRANSDUCER J
,_ MACH NO.TRANSDUCER
._,__..____j.I STAB POSITION lTRANSDUCER
t- PORT
-'STABILIZER
L I S F^C,I_ ACTUATO_ FTT_'_- ----_, l ,N_,VAtvES I jl _.k,
MECHANICAL FEEDE_AC ......
ELECIRICAL FEEDBACK __J
BLOGK DIAGRAM
A3J-I LONGITUDINAL CONTROL SYSTEM

LATERAL CONTROL
STICK F - -- "- -- "1 _,/MEC HANICAL FEEDBACK _ _,_
' ELECTRICAL
ROLL TRIM SWITCH
ON CONSOLE
q______j,wo
ROLL TRIM SWITCH
ON STICK
LWDt FRWC>
TRIM SELECTO_ SWITCH
ON FLIGHT CONTROL PANEL
LATERAL TRIM
BLOCK DIAGRAM, S
A3#-I LATERAL CONTROL SYSTEM

J......I GA'NI......f
o'_
_I SHAPINGGAtiN
_7 HOLD"e
Jhp L
I H£LD hp
PITCH
SYNCH.
FAST
SYNCH.
SLOW
SYNCH.
LIMITER
GAIN
I___ A L FCS I....
SIN 0 TAN £)
° 1SIN _ TAN 0MFRS
Ah [ ADC
[
0
hp
BLOCK DIAGRAMLONGI]UDINAL
A3J-I AUTOMATIC FLIGHT CONTROL SYSTEM

't'+
SYNCH.
HOLDBANK
ROLL ISYNCH.
STEERING ERROR
SYNCH,
HOLDHEADING
GAIN
HEADING
SYNCH.
GAIN i
BANK ANGLE iSWITCHES
HOLD HEADING
° I0HOLD BANK
t
_ SHAPING
BLOCK DIAGRAM
LATERAL- DIRECTIONAL
NAV
SHAPING
LIMITER
AFCSENGAGED
HOLD
'1 HEADING
HOLD BANK
A3J-I AIJ.T+_LG FUGHT CONTROL SYSTEM

TO FLAP CONTROL SYSTEM ,,_/7_
v:_TIC_L ETA IIL|ZEII --7
!_'-WASHOUT "1
ACTUATC_"_ GY_O
:: I ! FEED_d_.CK POTENTiOMETEll .--_ _
..... A_,_l..l_litiE_. ...... .a |_CTRICAL F|iDIkkCK /_CHANICAL FEEDa,,_CK
BLOCK DIAGRAM
;.J t[ FEEL IIUNGEE "=1 /SYSTEM _ i_Zf|i_-Tr_ ....... "............. -'-'.'-:_..._,t.,_,m,.4_k
kJ "-PRE | EUA| IIEDUc|R (RE F) _-.-._, / _ [-'RATIO CHAN GER _] I l'kl_ ...... • "*-'q'_ _
!._k,._.j_ illrROM'--m.Illi_:_'--_.., II HIIHT,r
HIIIH'i \:. _rX__i.H_/
_-'_!.. _ -_J _j VERTICAL STA|ILIZEII. ACTUATO A''_ I
•_-C_ECKVALV_ HYDRAULIC SCHEMATIC
I
E
G'
LEGEND
n Y _JI'.A_J;- tC /_
A3J-I DIRECTIONAL CONTROL SYSTEM

_D
STORES I
SWITCH I HIGH PASS
FILTER
ALT. o ITU_DE_
HOLD
ALT
I iNTEGRATORI I
STAN_
"F_/__CH
o_H_
F4 (ZAS WrEGRATORSERVO
•, LOW PASS
FILTER
I
-ISWITCH
2A5
ELEVATOR SERVO AMP CURRENT
" I_ _,TCHT--I_ II __'T°"I I I i
TRIM TRIM HORIZ STAB-._PITCH LrJ TRANSFER HTRtMCONTROLI_HoRIZ'STA8' H I
'-[ 1 _'_ Ih II I I I I PITCHI, _111
i ' ,I,.A_)n"T_'Ol' '1'
[ GAIN I _ 5PEEDBRAKE r--- .......... "-'I, AJB-3 SYSTEM ,
ELEVATOR F3 (l_) I , om_u. ,"AMPLIFIERI L ........ .J
t L_;';_--_°] ":'SIN 8 RESOLVER I ' I eliB_. , '
Jl_ ......... Jl
I f"Tc" I COSe ] _-- _JATTITUOE - - .........
INTERLOCK
_,o i ITR_'_I
A-4 Elevator Channel

0
Headin_Synchronizer
Servo
CSS
Er_.
Stondby
A-5 Roll Channel

RUDDERBANDPASS
FILTER
RUDDERSERVO
AMPLIFIER DUAL INPUT _tVALVE
I
RUDDER
ACTUATOR
MECHANICAL
FOL LOW- UP
LOST MOTION
LINK
POSITION
TRANSMITTER
RUDDERPEDALS
OR TRIMPILOT
Fs (IAS)YAW RATE
GYRO
IIIII
_.J
AF --
A-4 Yaw Channel

i.,'r,c_'rO_T--'--" 1 zoo'."_ _" .......
-- I L._.. _ ,,#C_
I
pATC'O_
I "_'_#'l"°tlI _#lAy,_l
1
F;.ap .S'cJI S. JC'_
i _ F "t_l _'_:
Ii
I
/t l,"o
_E_vo
I _r_
A-7A Pitch Axis

A-?A Roll Axis

rAW iC_A,vaIF,.-Isw :_s
AILE,_OAI UH TMU/.TI-
fOSITlO_lj lPLIER
Ot./A I.
_P
F'Dz UJu,I-UP
Pd/l l_// Y'D
SE_VO
lyer/l,#FO,_
#IAFOIVlFORFo_-uP
_2f occee_uP
A-7A Yaw Axis

l ] (s:_'l.e_is2._5o.62.5001 I
GAIN
SAS SERVOI. /_ [SCHEDULER
10.5
I I
• _ GAIN
SCREDULER
LATERAL ACCELERA.TTON
I ies 1"t!9 J
i CrT/SEC21 -[ACCELEROMrrER__
B-52H 1.0
AIRPLANE
EQUATIONS
OF MOTION | YAW RATE BS 695 J RATE GYRO
[ _DEG/szc) "1 e75o
I
f IMPACT
PRESSURE
II
_._ (VOLTS)d
ra!
]J
F .... J (VOLTS)
(VOLTS)
I SAS ELECTRONIC FILTER _.__
S2
(S + .033} (S o ,25) (S * "/)2
SAS ELECTROI_IC FILTER
S2
(S + .033) (S + 1.5) (S + I"l)3
B-52 Modified Yaw SA3 Block Diagram
k
(I_.)
MAllei POWER
ACTUATOR & ELEVATOR
7.395 X !0 T
(S ÷ Yt,6) (S 2 + I50S * '*5,350)
ELEVATOR B-52R
MOTION _ AIRPLANE
(DEG.) _ EQUATIONSOF MOTION
iI
I
II
I" ......... !IMPACT
| pRESSUREI
I
GAIN _
SCREDUL_
pITCH RATE
(BS 1327)w
(DEG/SEC)
RATE GYRO
6,750
$2_139S * 13,500
!SAS ELECTRONIC FILT]_ |
93'7.5 S 2 (S') * 79.1S * 12,800)
(S ° .15) (S * .25) (S + 150.) (S + 283.12 /
)
B-52 Modified Pitch SAS Block Diagram
15

c_
.250 v/_eu'sec.
l _ H _,_ F_RATE GYRO PR.E- AMP AMP- DEMOD : SW- MOD.
PRE-AMP
RATE GYRO
GAIN CONTROL
_°_w_ e"-]ENGAGE CRANK 1 SERVO DISP. __._ [TAP/"_ _ POSITION--_ _ _'_
DISP. FEEDBACK VCRANK POS.---_ ) _- GAIN TAP.
SYNCHRO "7" _ e3
H AMP-DEMOD _
MOD
CLUTCH
_ _ _ SERVOAMP" _ _'OLM_L_VRUP
_$, "----0-- .................. SERVO---_C--RATE GAIN "................ t_-_--- ITRIM METER]
1
B-52 Original Yaw Damper

PILOT
_q RUDDER IPEDALS
[YAW DAMPER I
-- -'_ ENGAGE l
/ SWITCH I
I
COMPASS
SPOILER MECHA_CALMODE
I-q FORCE
L_KWHEEL }
= l STEER_G --COUPLER
ROLLGYRO
BOOMSENSOR
i
l PITCHGYRO
- - L_K
I
L ....
A UTO-
LAT.
_ REFUEL ARSS & LLCOUPLER ARSS & LL
/ ^u,o_ |I PITCH _L_
ELEVATOR MECHANICAL MODE
MA-2/A-14AUTOPILOTAMPLIFIER
!!!!
TRIM STABILIZER[MOTOR _ _
_--_ SERVO _m_ELEVATOP.S[
tII!I
...2
I YAW
RATE
GY RO
ELECTRO
MECHANICAL -_'_
YAW DAMPERCLUTCH
f
! ___DERI_RU_:_ER
B-52 Original AFCS

r _
I
I PII.,OTS PITCH 'tl _
TRANSDUCER
COPILOTS _ NULL
PRELOAD
CIRCUIT
AMP
DEMOD
TI !I II II I
, ,,,
I TRANSDUCER
SERVO
CONTROL
BOEING __FORCE
SWITCHES
PITCHADJUST
OVER POWERCIRCUIT
THRESHOLD
CIRCUIT
GATE
NORMAL 1
ACCELEROMETER
I JI "G" GATE I
CIRCUIT
Ii I
Dis_ I II
A/R II ADD TO SERVO I
L/L DISP-'_'O'_ DISPLACEMENT I
___.._ L/L I CHANNELIII
. TO THRESHOLDCIRCUITRY
D TO OVERPOWERCIRCUITRY
STICK STEERING COUPLER AUTOPILOTAMPLIFIER
B-52 Longitudinal Control Wheel Steering

C_
PILOT'S ROLL
TRANSDUCER
I COPILOT'SROLL
TRANSDUCER
I
NULLADJUST
PRELOADCIRCUIT
A/R D1SP.
L/L DISP°
A/R RATE
ICIRCUIT
AMP" H FILTER _DEMOD.
GATE
, -I
AIMITIsILTO
MOD :__ TO AMP. l
• _ " DLSP. INPUT[
>8"
!
.[HEADING HOLD[
I CIacUtTa_ ]
L--
WHEEL STEERING COUPLER AUTOPILOT
AMPLIFIER
B-52 Lateral Control Wheel Steering

roo
WASHOUTGYRO] [ SERVO,
iACCELEROMETERI n-1ELEVATOR
I YAWRATEGYRO
I YAWRATE6YRO
FEEL&.HTRIM.A/LERON
LATERAL J
ACCELEROMETERJ
TRIMAUTO"} ELEVON
_j._ RATIO I I _ "_-LINKAGES CHANGERI - Iv _.J ELEVONL --_
, P --IACTUATORI-- _
LINKAGES..H RATIO l_.J,,m J 5a , r -- - IICHANGER[--_ :L__
J l ELEC. LLJ MECH J;.1_ DAMPER ,-.IINTERCON
SERVO "I [INTERCON,Iv IDAMPERL RUDDER L_a.r._ W
._,/"I 5ERVO I -"/ ACTUATORI
__-H FEEL& -TP,IM HLINKA SI
RUDDER
B- 58 Stability Augment at ion

B&NSYSTEM
ELEVATORA/P RATIO
,SERVO ,jilCHANGER
IIII
M
I
XER
ELEVON
ACTUATOR_
B-58 Attitude _tabilization Mode
Pitch

roro
B_NSYSTEM
II
AILERONA/FSERVO
RUDPER
B-58 Attitude Stabilization Mode
Lateral

C.S.S.SWITCH
ControlSt/ck5t#ering
5Mtch D_r#ssedSTABILITY
AUGMENTATION
MODE
r_)
SWITCHIN6
SUBSYSTEM
ControlSitokSteering
5##ch Rele_seo'
ATTITUDESTABILIZATIONAND
OPTIONALMODES
B-58 Control Stick Steering Mode

ro4="
PITCHRATE6YRO H H DAMPERWASHOUT SERVO
ACCELER-1OMETER
n-I
AUTO: TRIM
H MACH-ALTAIR DATA REPEATERSYSTEM SERVO
B&N'SYSTEM
Icose
"_WASHOUT
STICK
_ELEVATORI I
1
M,XE_tl ELEVO.ACTUATOR
RATIOCHANGER
ELEVON
B-_ Maeh Mode

ro
RATE WASHOUT6YRO SERVO
ACCELEROMETER i n'l
I I WASHOUT STICK RATIOSYSTEM I ELEVATOR
,COS@ _- i -_ _---'IAUTOPILOT[ SERVOiELEVATOR
A-h I CHANNEL
IINTEORATOR
AIRDATA
SYSTEM ]_t MACH I
ALTITUDE AMREPEATER
SERVO
i AUTOTRIM
I
I t' ENO,NOTHROTTLE _,l _._- SERVO6- --
WASHOUT
MIXER
tELEVON
ACTUATOR
I ELEVON
B-58 Math-Altitude Mode

DO0"_
_.J-LAT,ERRORI IINTEGRATOR
BANKANGLELIMIT ELEVON
B-58 Constant Heading

i
ro-.i
B&NSYSTEM
ROLLRATEGYRO
I YAW RATEGYRO
YAW RATE6YRO
LATERALACCELER-OMETER
LATERALACCELER-OMETER
INTEGRATOR ANGLE
E_ r-
AILERON
A/PSERVO
_IDAMPER
LSERVO
"I')'
I
RUDDERCHAN.INTEGRATOR
LIMITI
ANGERIF
Ay
5TICK
I--
_ MIXER
ELEVON
"LI ELEVON16_
I IACTUATOR[----_
TERCONNECTI"- |INTERCONNECT
IDAMPERi---._/IACTUATORI----_Is_Rvo
RUDDER
B-58 Heading Nay Mode

poco
CIVILNAVIOA-TIONALAIDS
SYSTEM
B&NSYSTEk4
ROLLRATEGVRO
YAWRATE6YRO
YAW RATEGYRO
I
LATERAL J
AO_EEROMETERJ
J LATERALACCELEROMETERJ
_E. LAT.TRACKL _T,rv
COMPUTER_ BANK J , "_"_.(SeamError) _ ANOL.E[-7 _ _
I , ' _ I j II ELEVONl , ,J_,. IAILERONI[VRATI0 , -" , _-_
¢ YN H A/P ELEVON_a}-_S C P,O_ SERVO_tCHANGER_"FL'>" I MIXER HACTUATORt-- _
S SEL__ IELECTRICALL.JMECHANICALJ
//INTERCONNECT//INTERCONNECTIL,-N/ IDAMPERIL'i"_jRUDDERLar ./ d___Jl
- -- _ =l SERVOI---'t/ IACTUATOR/---/ I
,....!RUPDERCHAN,L._ / IJ JINTEGRATORI I _.
a_ j " ' -'_]._-- RUDDER
B-58 Localizer Mode

DO
PTCH HO MP R_rE WASHOUT SERV 0
6YRO
MIXER. J ELEVON
J ELEVONACTUATOR
B-58 Automatic Glide Path Mode

OLOCALiZER
R EC...IV ER ,.J "_
STATI C _ ALTITUDE p'_"_PRESSURE CONTROL
IL$ "] = IGLIDE SLOPE
i POSITION i
" (ql
tlq)
I PEOAL i
F P-AN_'JCER$ f
tlql_
I(=)
$ERvo
AMI_..I ¢IER
[SYNCHRONIZER
l (rc)
mJl:_3E't
CAR_.S
SERVO _ &ILERON
_(kMPLIFIER i_]. CABLES
Ilq)
i,_-._ CC,NT ROLVALVE
t r EL_v_TRiM _TUATOR
1 (LOW SPEED
L WINDING)
_rc) |NO_,_T'_ llLOO_ F'_I_*TIONS W_qCM ARE PA f_T _F_ TH[ F'LJ_I4_ GON'IT_L.UE_
|(q) IN'_lC_'l'__S CAIN IS VAqlED A_ A FUNCTION :_r DIFF"L'_¢_:T1A_,. P_I[S_E
I ('I"AS) tN_'1_$ GAIN I$ VARi£D AS A FUNCTION 0_" l_tl r A_ $PEE_
C_x'rA IN;_
B-66 Autopilot

k_4
XB-70 Pitch Axis Augmentation

1_11o_ Q..4 CopJ.1o_
ACI_TO,_
I
Nm _ _J
0
G'£T_O$
• i
±_y_,, ,-- +
I
II
x_
" I I , --I ÷
._ I.[ L'Ls'vOX I----)"
I'_-'l- '_"_', _._ =,_
I _ _u_o. --_" _'
I _ _o.+ -- - _- <Te_,I e,_ _.-._,,_I
AC'P_TO._S- + _ ,
- I I DI_I,
mML _ PALA_:
XB-70 Roll Axis Au_ment,ation

,r,|!
+ _v X.r- X£ _.
/ _°-*_g° I l 's'' "/_J:LI.0 _8/se¢
C'/.A;::_L
-- +1 3s÷l _/s i
._ ,/d.:do_
XB-70 Yaw Axis Augmentation
6ms -+3'_.-

kJ44z-
PITCH
RATE
CYRO
Kql = 0.5
q
DEG/SEC
Kq2 = 2.0
I
I • 0.05s
I_I_I_AL &
AUTOPILOT
INPUTS
_ LIMIT I+_10 DEG I _ -11+0.1 s
ACTUATOR
DEUIEi
INBOARD
ELEVATOR
POSITION
SWITCH POSITION: 1
2
PITCH AUTOPILOT OFF
PITCH AUTOPILOT _NGAGED
C-5A Pitch Stability Augmentation System

ka4k_
I ROLL I
CM)C]
G
I+0.05s
DEG/SEC
_LL
A/P ON
+
SCHKDULED _)_GAIN, G
MANUAL &
AUTOPILOT
INPUTS
BENDING
FILTER
(1+0.06s) 2
+_3oD_
SAC
+
0.48
0.055
0
GAIN
SCHEDULE
, !
40 125
DYNAMIC PRESSURE, qc
ACTUATOR
1
I+0.25s
C-SA Roll Stability Augmentation System (SAS)

dsc uL lDEG. -I GAIN,GI
_ISCHEDULED I
DEG/SEC-I GAIN, G2 I+0.05s+
MANUAL &
AUTOPILOT
INPUTS
BENDING
FILTER
4 +
(1+o.o5_)2+20 DEG
+ ACTUATOR _R
1+0.2_s DEC.
0.34
G1
0.157
0.07
0
GAIN SCHEDULES
2.58G2
o.78
0.32I I i
40 10o 230
qc
, i J
4o 100 250
qc
C-5A Yaw Stability Augmentation System (SAS)
36

kJ4
70 19o
70 190AUTOTR]M
PITCH
TRIM
lq;OBDEO
C-gA Pitch Autopilot: Inner Loops

n. - F_ (50_)
GS - GLIDE SLOPE
RA -RADAR APPROACH
hFTRADAR ALT
PROP
LIMIT
I + .5S
'r- ) SEC PL _
.I SEC fflg-I__
Ih_IBITS NOSE-DOWN
INTEGRATION
(_ou.-o_)
C-5 A Pitch Autopilot: Radar Approach,
Glide Slope and Flare Modes
38

V'J_AV COMPU_"_
DEG
TERRAIN FOLLOWING
DEG
VSFI
IAS - kt I O. " "_)
INTEGRAL
PROPORTIONAL
0cDim
0¢DF_21
C-5A Pitch Autopilot: Veruav, Terrain Following
and Mach/IAS Modes
39

Integral
Proportional
Altitude Capture
VSFI
Altitude Hold
R.O.C.
CADC
Height
Error
ft/sec
h
f_
oI
_ Limiter I
7000 FPM
%dee
AC
Y@ _cJJ@
I
"°_'"° AM
%deg/sec
C-gA Pitch Autopilot: Altitude Capture andAltitude Hold Modes
4O

DEC,
DEC
I ATTSY_IC-_HCLD
HUBFCRCE
LB.
r--] FI_.PS •
o_ _o_ I ....
±2.7LB
DEADSPCT
0.19 DEG.
TH_HOLD
C-5 A Roll Autopilot: Inner Loops IncludingControl Wheel Steering
41

DEC
BEAMERROR
PRETRACK
INTEGRAL
+I ÷
_ LIMITER _ .
+ ++I +45 DEC, _e
COURSE CUT
PROPORTIONAL
DEG
y/e DEG
COURSE ERROR
(SINE FUNCTION)
SUB -MODE
ENTRY
CAPTURE
PRE-TRACK
TRACK
VOR,
TACAN _ 62 NM
5.0 DEG
2. I DEG
1.2 DEG
TACAN > 62 NM
5.4 NM
2.3]_
1,3 ]_
C-5 A Roll Autopilot: V0R and TACAN Modes
42

CTDI
NAUTIC_.LMILES
_/e DEG
TRACKANGLE
ERROR (TAE).
SINE FUNCTION.
CK
I I I INTEGRAL
I
I _ qc
, l,° i•4S _ I 'I,
l qc PROPORTIONAL
SUB-MODE
ENTRY
CAPTURE
TRACK
CROSS-TRACK
DEVIATION (CTD)
5.8 NM
0.4NM
_ DEG.
C-SA Roll Autopilot: Courseline and Air-Drop Modes
43

DEG
ROLL
ANGLE
I "--_'[ i+1'6s" ]
LAGGED ROLL
INTEGRAL
_5.631
AMPLITUDE SUB-
LIMIT MODE
25 DEG CAP, TRK
7.5 D_ GSC
ERROI
DEG
I+O. 5s
+ . I-i'"'i _o '! _.sY-oi_f.
1 + 478 TRK
T - 6.7 SEC RO- 0 SEC O_-_i-_ER
++ D_
,.%GsC & _-A _ Rc
- _C
)+
RA
CAP CAPTURE
TRK TRACK
GSC GLIDESLOPE CAPTURE
RA RUNWAY ALIGN
RO ROLL-OUT
SUB MODE
ENTRY
2.0 DEG
0.67 DEG
20 FT hges rTOUCHDOWN
C-5A Roll Autopilot: Localizer Mode, Including Autoland
44

k_
PITCH
AUTOPII_
BG 489 B
*FCS
CONTROL
S'*qTCHI/;G $IG.qAL )'(_ FlaRE RETARD _0_g@_D
DIRECT THRO_fLE MODE CO:,L'#L%IFDS
÷
ltA_t
÷
w
t _
C-gA Autothrottle Analtyical Diagram

_e -_ AI RFRA_J'E
E
kutomatic Trim workl from different|a,servo ¢|utch current.
_M
Ah
$4-
KC-135 Pitch Diagram
AIRFRANE --_
gr _[ ax
E8
1.4.'/S,¢ L__,
Llmff J I
/
H5 Heading 5e|ect
TC Turn _OemandL Locsllzer
6
KC-135 Lateral-Directional Axis Diagram
46

III
II]!
:1IJ
Coa_.rol_c_
PcverControl
XC-142A Pitch Control System Block Diagram
CO
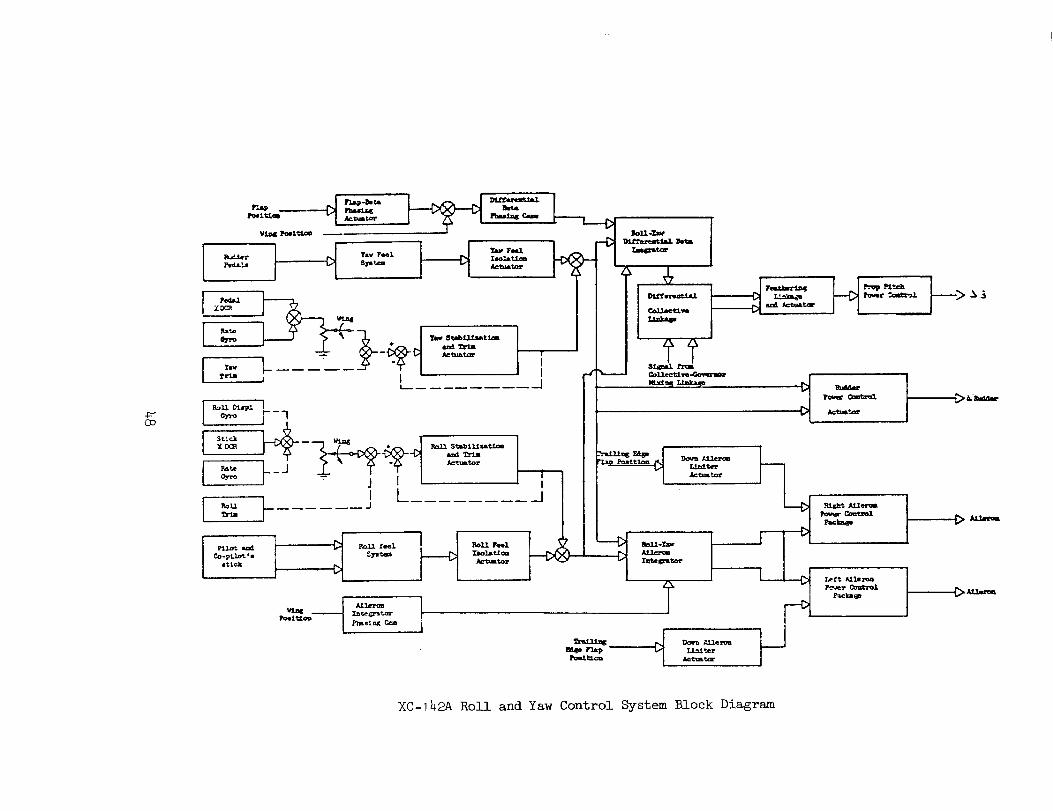
XC-142A Roll and Yaw Control System Block Diagram

$-
kOGOLI4etI__rs
_v_r_ (_)
I
I
Tlxr_ .-_leDiac_o_ct
Feel I_o_t _ogA_tu_tor
I --
I
r
Tea ".J_x-'L_
Tea_T_ T_
I
XC-14_A Collective-Throttle System Block Diagram

o
AIRCRAFT
I
_J CONTROL Il WHEEL I
/ PITCH I r--I i
/ FORCE _--_ qc I'-)l
/TRANSDUCERI LTJ I
J
._[ ROLL IATTITUDE I
"I ALTITUDE ___.CONTROL
-I P'TCHIATTITUDE
EGI56A3 I _-AMPLIFIER LAG
6AIA. I0
. J uP i"[ELEVATORI
o
ALTITUDE
ENGAGE
.__._._EGI56A4_
DEMODULATOR_ "'6AIA9 /
HIPASS BYPASS
-)l EG156A; =' t_1NTEGRATOR
,, 6AIA6
J BANK }___"ICOMPENSATION
EGI55A4
INTEGRATOR6AIA7
I 1
EGI55A3 IAMPLIFIER I
6ALAS I
EGI55A3
PRE-AMPLIFIER
6AIA4
I
I SERVO I I
EGI79AI /FEEDBACKI 'ISERVO L_JELEVATORLJ
AMPLIFIERI "I SERVO I
6ALAS I _'AI;_L'_ E L I
ALTITUDE
ENGAGEo
I
K DENOTES A MULTIPLIER CONSTANT
qc DENOTES AIRSPEED SCHEDULING
CSS DENOTES CONTROL STICK STEERING
EG156A4 }
DEMODULATOR I6AIA3 I /
DISENGAGE /382 I CSS EGIBOA4 II
-ISIGNAL CONTROL I_---o-_ _--" AMPLIFIERp "--J
L 6A,A2 j? 6AIA,/_7 ENGAGE
E-IB Pitch Axis

I
n,,,Iv) l,,g _,)
w_
m
I
1
W W
, ,
4_
I IV_P-
-- t-_ ,C_o_
_q
w
m
0_ I_)
T
_--__
|
I ooz_-,,'o._, _z; JI
.rl
0
.-I
pq
!

LIlro
I
] OO.T_LI
(" WHEEL I
PITCHI I----I IFORCE _ qc _
TRANSDUCERI L._ I
I
ATTITUDE
._ ALTITUDECONTROL
I_I APN
117
._ PITCH
ATTITUDE
m
AMPLIFIER LAG
6AIAIO
_ J uP I
I iELEVATOR[
L_J SANK]"[ COMPENSATION /
SCHEDULING
,, qc | ALTITUDE
ENGAGE
LIMIT
ALTITUDEMONITOR
I
__._ EGI56A4 I
DEMODULATORr(-6AIA9 ,/
HI PASS BYPASS
EGI56A2INTEGRATOR
6AIA6
6AIA8 I
I SCHEDULING°° IT
I SERVO
|FEEDBACK
EG,SSA31EG,79A,I IPRE- I SERVO I JELEVATOR
[-_--'IAMPLIFIER IAMPLIFIER[ "1 SERVO
I I 6A,A41 6AIA51 '
ALTITUDE
ENGAGE 0
INTEGRATOR6AIA7
EG,56A"IDEMODULATORk
6AIA3 I.... D IScEsNsGA GE
382EGI8OA4
AMPLIFIER6AIAI
-3
K DENOTES A MULTIPLIER CONSTANT
qc DENOTES AIRSPEED SCHEDULING
_ENGAGE CSS DENOTES CONTROL STICK STEERING
S-2D/S-2E Pitch Axis

(---t-- "1., co.-_.o,_I _ I s_.voI ',WHEEL _"
I A EGI56A4 .I EGI55A3 EGI79AI 1ROLL EG 56 3 CS H EGI55A3S SERVO IGH
=,RANSDUCERJ= OA3A,FAGjIDEMO_TORICASSI _3A7/ -_"AMPL'F'ER,A3A.,AMPL,F,ERoA3A,,ER._"ojAI
C . HEADINGR CONTROLA
T
i._ ROLLI ATTITUDE
iI
.__" RATE
. I EG'56A31---*(_ DEMODULATOR CSSDENOTESCONTROLSTICK_' [ 6A3A6 HEADING (_ STEERING
•_ DEMODULATOR
T I 6A3A3
II 9373B2 IIEG,BOA4 ,SENGAGE.CSS.SIGNAL _ HEADING_-_AMPLIFIER
: "/ CONTROL i i 6A3AII 6A3A2 $ ENGAGE
E- 1B Roll Axis
.jCONT,OLI . IsE,voI:WHEEL 1 I I" ' I . IFEEDBACKI ;I,,, "ROLL EGI56A3 CSS S ERVO HIGH EGI55A3 II /FORCE DEMODULATOR,. IAMPLIFIER.
PRE- AILERONL_ DEMODULATOR PASS AMPLIFIER AMPLIFIER SERVO J
TRANSDUCER 6A3A9 6A3A8 J I ] 6A3A7 / 6A3A4 6A3A5
CONTROL EGI56A3 qc DENOTES AIRSPEED SCHEDULING
6A3A6 HEADING STEERING
._ EGI56A4 /H
. ROLL DEMODULATOR
ATTITUDE 6A3A3
937382 ___ EMGIBOA4 DISENGAGE, CSS,
t SIGNAL A PLIFIERj _7 EEADING
• ROLL CONTROL
RATE 6A3A2 [ 6A3AI NGAGE._=
S-2D/S-2E Roll Axis
_3

STABILI;ZATIONRACK
÷L_2:/::,.
STABILIT.ATION RACK
F--G--L__F-_--P_
FL"--L_........
ROLLG)'R---'_I STABILIZATION
F]-:222 .......
RACK
!
L_$'t
Regulus II Lot I Autopilo,t

k.,TI't.J'l
i i.
MODE
! GT_IDE _TCHLgG! _,0,._"_ & AL2ITUDE_-- PRiG
c
i-i !. e°'-"A .I i_
1 MODE R .I _,x-_ _, t i G ._o._1___%
1
;--- i ,
!
/ I _T.ZO ._.',_Z,_
, _, i _ _----_!' "v'z_ _
° ....._'-_ ....'_'_ 7 ,_/'i'iX!_ .
___ a.- .... f _', I _m_! _ " t,l+ _ s t _)_ _ _i \ j W;'.._:- m-I _ _m_ ioo /f i! #, ' \ . AI'OR ti .................. ' _ ilI \ _. " i
I _ _"-"'_ _- ' _ i i t sY_cm_o !t __, _ I _ _lh
! _, _'tS'_ . o . G- 2iP' c O,'_#_h"DiiII , ,
t ....... • ....
i
ELE-
i
1__..t
Q-2C Longitudinal Control System

x_
IqlGHT TI_ !
!G =
s_o
!
I !
Q-2C Roll Control System

I
Launch
Condition
Bias
Scheduled
_b=f(h)
I K_s I(s+40)(s+lO0) _
Derived Rote
'+ _,_+ _ 8 (V.G.)
Fitter AltCont. _'h
/
Rlter
Is+lO
IAScuo.
Pitot- Static
System
I-_'uS+ I
IAS/qcPOT
BqM-3h Pitch Axis

co
Der.Head.
--IAS
_I Actuator A/F (V.G.)
Derived Rate
s(s+ 401(s + I00)
Is_2 l-
+
B_,[-34 Roll Axis

kO
_.'._._,,""_._1 )
MQM-74A Elevator Control System

o
VO _.'T'$
_l '
..._ t._ _,
_'e_ _ _T
J
MQM-74A Aileron Control System

F3H PITCH C}L_NNEL

O_ro
c,,,y Po Ce_ANt,,_"
VE',PT/ £F_,e
3[,0 _e'&
I T'RIM10 X)EG1_ ,,J 0.35
l r li,÷o._si
"k
L,£F:
_^&¢,
<;;-& o/'__....%co_'lP/_.s5
"I'o.25 I I . _
---ki_ FN_ ^&r
RJ'LII _:
SE'RIF5 nlLFtf#_l AILEF_,;_I
SEA vo $ (,_ ,qCTUt_'roR4
-
t_IRFRI_h'IE
i
i i m i
/4 AN_'/,/V _ R
CoNTRoL_.ER,
I_._ _ l.,_,._.r I
Ri/,JCF
FDH ROLl CHANNEL

©
_ TC _ A/N
G,y_o r. NA_GE
CAHClELL_I_ SERIE_ RUE_D_'R _UDD_,_
._ R vo RCT_TO
:o.5 JNCM _--5°_R
F3H YAW CHA_L

O'_4L_
I MOIIONAL
PICKUP
TRANSDUCER
f! L___
r'---- 1
I PITCH I
I t, _-o j
IIII AN/AJB -3A F-4B
i INS _-411
I
I
! I H[AD'NGI I ROLL I t
I YiH_I lI I
--J
•
[ '"°'"'E IL.YNO
_o_s _--_7r;__--: _! --11I I r:AIN (C_t) I I _ I I
I L____J
'r li11 ^Ll ,,I U_.'C I ION I I -_-
I" ..... JI!
I It- ..... -IGAIN (IASt)
I i ' C!IANC_._tR " ' I
rtIc,t PIC K_F
CONTROL AMI_tF _R
PITCt_
C A,_CE It. [R
AIIENuAIOR
I PI ICll I
$ _'NCHIiO-
NIZING
CIRCUIT
I GAIN (Ck: f ) L
CHANGER
L ..... J
A_S
28 vOt.TS DC
IN .t.r C S
MC,'>! _No C'_ ITHIN C'_,
|O _G _.IMITS
r F
IOttOW-UP F
SVNCHI_O-
NI._ ING
CIRCUIT
, t r ]I • 2 I/2 LB _ AUTOMATfC
- ; FOIEE PIT CPI _' R _h'_ I
LI-INK SWITCH I-' .... "l CIRCUI,'_, I
.__T--__J lj ...... J STA_ lI.A' OR /""_
I
' i l_..... "II
-- .... T -- -- J" ---1
I t o-.'._,lo,_ :
I PAqAtLEL I CYLIh#[_ER _'* .... _
OPt P_T ION I I
I t. .... j .... J/ STA31LA TOR POWER
.__.J CONIIK_L CYLI_._ R
I. THO_E ITEMS SHCJ_VN _Y DUllED LIN_S AR_ NOT COMPON-
ENTS OF TH1E AN/ASA-32H.
2. TH_ ENI"IR_ DIAGRAM USED IN AFCS MO0{. TH[ I_MS WITH
SHADED OUTLINE _ UTILIZED IN STAB-AUG MODE.
PITCH CHANNEL
:::!::!_!_!!:Z!i`_L:_!::;!:::i_::!:!!:1:_(_.!::_::i:i:_!¢`_L_`_i:_`:_i:_:_:_`_:B?_:_<_$`_!_:_`_3!_:i:_!_$_:i:i:!:_@_#_:_ ' ,._^ ._.. ,,._.t..,..,..'...,_...._._ ........... .._:..,...,,_.,..,_.,,.:-_.,_.,..+¢_,..-..>.._>.,:P_._.>, _.._. .,_._._._ ........ ..... :....,.:,.,..,., ,,, > .......
ROLL CHANNEL ,_'G_T
CONTROl. AMPI.IFIER r OA_ 1 SPCIt-_¢_ ['T'_ Je"'i7, SIAR_ .D . ! ,J / I I
_ STASOA:'_ I i i LATC-;_ILSEII_S _--'J"---1 F:_,',_K l / --t/ /
SI_VO I I , S_vO t CY_zD_ _
AT:£_- F "'PL'"" L'J I i. ....... ._ L..... ._ ......
l i f "_T" _'--'_ \ _\\" L---I s;_,_< t ----_;_\\ \
LEFT
CONTROL AMPLIFIERYAW CHAINNEL
RUDDE"t _Jb_[ R POW_
,!"'";"'! t L- 'A;V
RA_E Iii
• IL_TERM_ __;
ACC C _.r- RO.vF. T'c. R .j Y_w
CANCF.LLIR

Leon- Lo_
_,;., ] (T,_,I_|]_o_dI('ra**l)
L.._J T,,
T_ i _1_ ..... ii ii ill ill i
YAW A_i$ DAMPER,
Tffm
ROLL A"XIS _2AM£ER
F-8D
65

..... "==1="
_1 5uv 4'olce Spofle.rs.__
Ac_umYor
Ru,ldev(L_,utln_/
I
, i_o,_o_o.//4ov_zovlfellI
.... I
ROLL t:2,A'TE COMMAND AUGI_rr,.N3"gR.
o%c_
cl3
I
k t'_evvo --/Ac.l" aorh)v/
YAW P_M_&
RudS_v
q
F-14

F-86 Pitch-up Preventer
E_7

/
TTi m
8+!
F-89 Sideslip Stability Augmenter
_8

®
J-ZCOMPASS
SYSTEM
I LS
LOCALIZERRECEIVER
YAW RATE i
GYRO |
I ROLLi,----E,I IDIRECTIONAL h I TR!M
cTUTR_0L ROGL_ %AT__:)" ]
COUPLER |--
ILS I IGLIDE SLOPE II
GLIOESLO_:_ CO_,_LERhRECE'VERI I_.G,"O3'_A-,
PITCH tCONTROL
(FC)
i HEADING ;TRIM
(FC)
IP,TCHRATEiGYRO |
_t
,TO RUDDER
CABLES
.tFC) INDICATES BLOCK FUNCTIONS WHICH ARE PART OF THE FLIGHT CONTROLLER - WG187.B-1
SH,A, DED BLOCKS INDICATE AUTOMATIC GAIN CONTROL FUNCTIONS OF THE AIRSPEED COIVlPENSATOR - PG70078-.1
f (q) INDICATES GAIN IS VARIED AS A FUNCTION OF" DIFFERENTIAL PRESSURE
f ('rAS} INDICATES G_.IN IS VARIED AS A FUNCTION OF TRUE AIR ._PEED
(_ SYMBOL INDICATES SIGNAL SUMMING
/I SERVO I [AILERONill
_ AMPLIFIER _ SERVO I'_TO AILERON
CABLES
CAGEABLE I_
VERTICAL t . _ , .I GYR0 _ i I
JGL_L_.44A__JI! . i.._ _----.._ I SERV0 II [ELEVATOR I / Ir, _ AMPL{FIER _ SERv0
" _ I RGTO64A-I i_ - I MG7OOIA-20B I
L I ? L,.. _ '/
- ISYNCHRONIZERL.__J
j_' TRIMINTERRUPTER
SG3A- I
TO ELEVATOR
CABLES
iF_c._SENSING_SWITCHES IN"1ELEVATOR "FEE',"
I SYSTEM
L " .EVATOR• -_ ACTUA'_OR
b
F-89 Autopilot

-8
j/_ OltS.N _I[N AUIOPILOI IS [NGAGI.D.
j_ _OS(0 W_N _EADI_ C_MmOL IS[_G_(D IX(IF? WH(N MACH CON-
1ROt IS AI.SO (kGAGI.D.
A CLO$[D 10 A W',4114MACH CO_II_
I$ (_._,,l.O, 10 II m4114 N.1 CON-
IIKX 15 [kT, AGED.
Z_ CLOS[D 10 | WH[ll ALT COMIICL I$
INIGAGI+O+l/_ CLOSED _ At*lO LAIS I_+llW.
,/_ CLOSI'D 10 A ON AUIO-IADS IIU_IN,10 f ON ALeIO-LAIIS PULL+I_.
CLO$[D 10 A ON AUtO-LABS PIJU.-UP.10 I licit4 R01L-OUT lliLAY IS [kEII-
GIZ[D.
A CJ+OSED WHEN kUIOPILm IS 0IS(M*
G_t,,[D. WH[N IIAMK AMG£..[ (XCEDS
60O, WH(t+ P11C14 AI_L[ (XC._S
S_. WH[N MACH OR ALl COk']iOL I$
[_,AG[D, WP(l_ C$S IS OI_IIAT[.O
AND Dl_ltdG AUIO-LAi$ PULL-U/'.
d_ CLOUD 10 II WH(_ 14ikCit OI ALlCONTROL IS [N(,.AG[D. _41GM GAIN
ON VUOCIIY FUDIIACI( CAU.T_S MO-
TOQ 10 IIU_ Wiry SLOWLY |1415 IS
[OiilVlliflll 10 A HIC_I-FA$$ N[I'-
WOItI( WI1H A LON*G TIM[ C,ONS_IAN],I
OPlll li_[tl AOIOPltOi I$ OISili-
G_(0. WH[_ lIAr( _ [XC(ED$
iO O. WHEN PIICH ANG_ [XP.I(O$
_+ D_14G AUTO-LAI$ P_l-UP Akll
w_14 C$S 15 OP'IPA_D
CLOSED vw(14 G$$ I$ OP(llAI_+
,/_ CSS D(_T(S COi_lIOL SliCK _[E1-II_- I_liO SI[ICK5 Cmllr-lOOF
J_{)N¢I CUQ AI ION, I
CIOSIS 4 $ $IC_$ Nr'_l LAIS PUtt-
UP SIARI$+ OP|m WH[N AIRC_
IIt_CP($ A_d(,L,t _ _LI. s{'rlING ON
V£ciC,q GY;'01114tS N[TVeO_K IS NOt
I_/CLUD(D 114 PHAS[ II GoMrI'GUI_A -
TI+ON.i
_ IklOICARS GAIN SCli[DIIL[O AS AFUNCIIOII OF AIilSP([D.
r---] ik'_lCM[s GAIN scHr_UL[I) AS A |U14L'r ION 0r Mk_H IlUMIOI.. t
_ II_I4PJOI(S C_dl,lll ;$OI[OU_D AS A IrUNO+ION OF NI I$,11_._ AND MACH IIIMI_.
A
I
R
C
R
A
F
T
PITCH CHANNEL
F-tO0 D/F Autopilot

,, >
&A&
A
AA
NOT{S:
,/_ OPEN Wt4[N AUIOPILOI IS rNGACED.
L_ CLOSED WHEN RO(L-OUT RELAY IS AUTO-LAI$EN[I_I?TO AT END OF
PULL -UP.
//_ CLOSED DURING AUTO-LABS PUL.L-UtL
_ C_OS[D DURING AUTO.LABS PULL-LPP.
CLOS[D 10 POSIIlON !1 WHEN ROLL.OUT RnAy '1S [NERIGIZEO.
OP[N WHEN ROLL-OUI RELAY IS |NER{;IZED.
CLOSED 10 POSITION A DURING LABS RUN-IN, CLOS[D 1"0 POSITION II
DUPING AUTO.LAIR5 PULL-UP.
OPEN W'_'W AUIOPlE01 1S DISENGAGED, WHEN BANK ANGLE [XCIIDS
60o, WH[N PITCH ANGL| [XCE[DS ._,0O, WHEN CSS IS OPERATED AND
DURING AUTO-_.ABS PULL-UP.
OPEN WHEN HtADING CO_,'IROL IS ENGAGED IHEADING CO_IROL IS IN-
GAG[I) _'HEN BANK ANCL[ IS L(SS IHAN T-|120 IF C$S IS NOI OP{RAT[ I_,
RI1CH AhGLE IS LESS 1HAN _ AND AU10-LABS IS NOT [NGAGED.I
CLOSED W_N/_ IS OPEN - ALSO CLOS,[D WHEN HIA01NG CON1ROL IS
E_,GAC.f D
CLOSED 10 B WHEN fl[ADING CONTROL iS (NGAG[D. It_[[ HOlE 9.1
CLOS_D I0 A _lt[N HEADING CONTROL IS NOT ENGAGED.
CSS DINOT[S CONTROL SLICK STEERING.
TWO STICKS AND INDICATORS ONF-IOOF CO/_IGURATION
INOJCAI[S GAIN SCHEDULED AS A FuNCIION OF AIRSPED,
I ROLL OUT I I RATE _ *',NO /I COMMAND J ,, GYRO ; -I DISCR/
" ROLL AILERON R,ooE, ["E"oR l o' AU*O ,LO, TR,MGENTERINGI I,_ I _R,_ II '_'ULSE_AO OSTj Zm | , ,
TOPI T [_(_, -- __AUTOPILOT_ LO
" - F _1_ _1_ _ _K ; C I S E.R_.O I I SERVO ] I I ACTUATOR I
, ,, T T r__j- -, [,_,_, _ jl L --
I I _ _---.---tFOR ASYMMETRICAL_ --
STORES /
; [ COMPENSATION j AUTOPILOT
, Sr/,_SITIVE _ • p...i_1 < F'''--_ . [' PHASE i. ,<'x_ I u,4
_R[.CTIFIER COM _::. J
_ COMPASS/ F COMPASSI, ]
SYNC AMPL p-_l SYNCHRONIZER I
AND MOTOR | /S_NCHRO RO'IORJA_
I HEADING
SELECT
LEAD
NETWORK
A
I
R
c
R
F!
T
_ ,R©,,. L IR_TE
{. GYRO j L---..
ROLL CHANN_.,L
F-IO0 D/F Autopilot

--4
OS_RT STROKEr-'--'---'-'l
I I s£Rvo FE_=OSACK J
""J_ piTCH RATE
%2:-$;
'..c'.E,ST_'C/<(.AgO',,T36.5_ F[ET I LIMITS
I_._ ICAT_.SGAI_ S_"_UL[D AS A _:LI_ICTIO_I01:AIRSPEED,
P I"TCH DAMPER
m
RCRAFT
SENVO _ _ I-1"H CO"T_OL ------AvP___..J I S_S_M
__ s_Rvo I
_ NONUNE.&R _. ! Y,W RATIE I.
OPEN WHENRUDDE_PT.D/d.SARE PRESSED.
L_ PHASE I CO:qF|GURAT|ON
//_ OMIT BLOCKFOE PHASE I CONFIGURATION
,_ INO'ICATE_GAIN _,E'DUI._ AS AFLIk_T,iOMOF AIRSPEED.
'_ IMOICATESGAIN$CHEDt.E,ED/kS AFUNCTIONOFAIrItSPEEOANDMACH _M_ER.
YAW DAMPE_
F- I00 D/F Autop__lot

g,__IO'RECTIONALL___COUPLERI"
I
ROLL IRATEGYRO
]VERT'cALLGYRO
_ _ ISTAeiCATORIIsTAemLAT°RIIHYDRAULIC/,---,'(X_)--,_O(pI SeJwa I---ff SERVO _ SYSTErXI--------'
r ,.,,_.-----ilI ' r:.-_l
_'°"_"°"_<_/'''''°_':_'°"11o_,.,,,_ t_t o,,,o,T i "" " I G,i'i't_,I
,,,T<:,, ,& I"':RT'CALL
c.._OL :1 --' P,TC,IRATE I'
L CYRO I
(_INBICATES SIGNAL SUMMING
[] INDICATES GAIN VARIED AS A FUNCTION OF INDICATED AIR SPE,ED
[] INDICATES lAIN VARIED AS A FUNCTION OF TRUE AIR SPEED
(FCilHDICATES PART OF FLIGHT CONTROLLER
DASHED LINE ENCLOF, ES DAMPER CONFIGURATION BLOCK_
A
I
R
C
R
A
F
T
F-IOIA Aut opilot
73

-4
STABT.LATOR BRIDGE CIRCUIT
NOTES:
I P_TCH ]CONTROL
I_!",ICK STEERING
'iSERVOIAMPLIF:ER 1
CLOSED TO B WHEN MACH HOLD IS
ENGAGED AND CLOSED TO A WHEN
ALTIIUDE HOLD ':SENGAGED
CLOSED TO D WHEN FIRE CONTROL
MODE IS ENGAGED
OPEN FOR ATTITUDE HOLD
OPEN FOR CONTROL STI CK STEER-
ING AND FIRE CONTROL
CLOSED FOR PITCH ATTITUDE
HOLD
OPEN FGR MACH HOLD
CLOSED FOR ALTITUDE HOLD
CLOSED FOR BEAM GUI DANCE
CLOSED FOR CONTROL STI CK STEER-
ING
TA SCHEDULING
MACH SCHEDULING
_ AIRSPEED SCHEDULING
__J_. ALTITUDE SCHEDULING
F-IOIB Autopilot

VERTICALGYROT?
KOiES:
AA
A
A
AA
U®
OPEN WHENAUIOPILOT IS ENGAGED.
OPEN FOR CONIROL STICK STTERII4GMODE.
SWITCH POSITION SHOWNFOP,BEAMGUI DANCEMODE.
CLOSED AFTER AUTOPILOT IS EN-
GAGED.
CLOSEDFOR FI RE CONTROLMODL
OPEN FORFIRE CONIROL MODE.
GAIN SrHEBU! ED AS A FUI_CIION GFAIRSPEED.
INDICA_S SUMMING POINT.
A
AII,E._ON BRIDOE CIRCUIT
F-IOIB Autopilot
75

1
RUDDERSERVO
AMPLIFIER
HIGH-PASSNETWORK
LAGNETWORK
SERVO FEEDBACK
PRE-ENGAG i
TRIM
SERVO
IRUDDER
CONTROL --SYSTEM
/YAW RATE __ _
GYRO F
POSITION _ _TRANSMITTER
ROLL RATE J_.GYRO -- -
LAGNETWORK
NOTE:
A THIS LOOP IS NOT IN CIRCUIT WHEN DAMPEROR AUTOPILOT IS ENGAGED.
LAG
NETWORK
]A CELEROME F--RUDDER TRIM
ADJUST
INDICATES GAIN SCHEDULED AS FUNCTION OF AIRSPEED.
INDICATES GAIN SCHEDULED ._,S FUNCTION OF M._GH NU_,,',BER,
RUDDE_ BRIDGE CIRCUIT
AIRORAFT
F-101B Autopilot
76

I!
5_s_e_
PARALLEL 6ERVO
II _=orceSwi_'ch
?
F-IOIB Stick Pusher
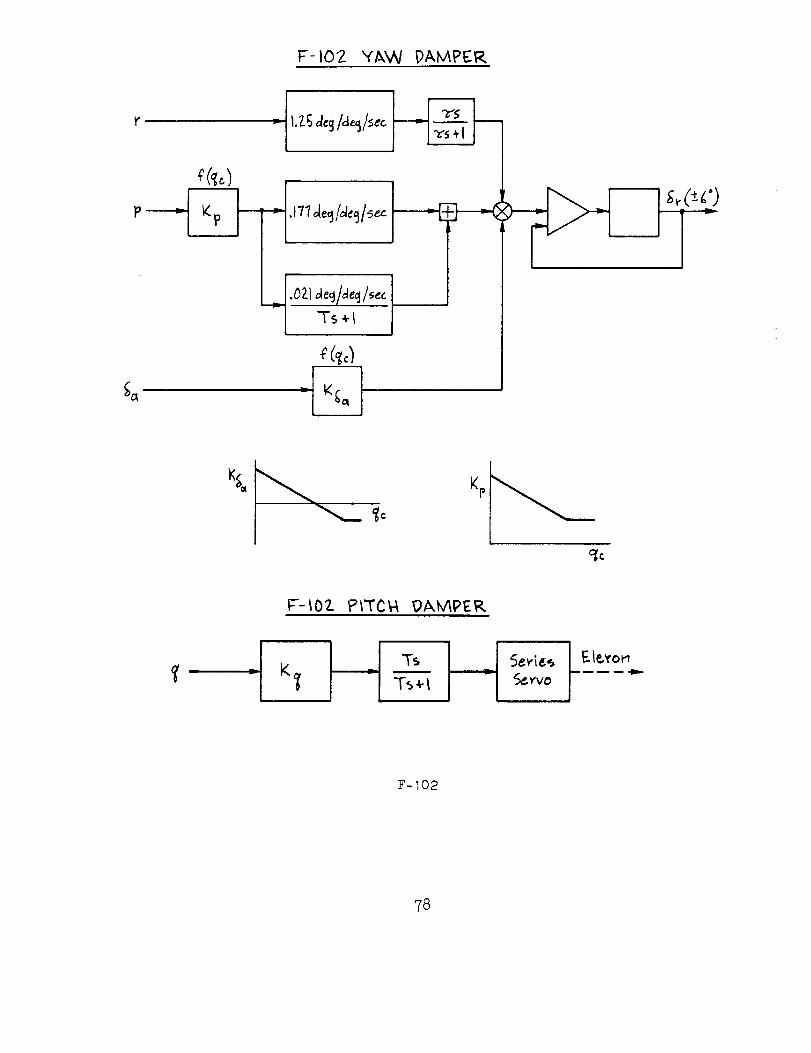
V-102 Y_W DA_PE_
F--IOZ P_TC_4 I)AkSPEIK
"T$m
Ts+t
F-102
78

-q_0
F-]OpA PITCH CHANNEL

F- ]O_A RO.IiL C_NNEL

O_
I I
I__,.o.oTs_I
,R/R f I_'I_,,nE
F- I05A YAW CHANNEL
CANCEL Z E_'
KcS
.><---(,÷,.,_s)
6 YRO
_z_ zA rE,_'A i.
Dg- sup R,_7"_"
I
_ I:#!

Coro
AI: C6CMoxs.)
J
I.A,T,Sl.Er I,?.ALTO ._
ATTACK l
iAa L AS ii
MANUAL IViOD_} T)ITCH _A_P{:_ /v}ODE A_JD. A[:C_ [AO'_{_
] t_u.iCOMUMI_
!PtTC. __
----!
,,Arc8
AMPL I
[L i:rT R K:/_L I:'I[{"D_ACK
I
I
[ _:_,L 1C_ _ I
M[CI.JA I,PiCA(, _ I_ [" _ _I_CIC
l AILERON !_
/'p_Lo'r'S'_\t_P,)T_,J
•,l_.ER0hli,_,'_,:_:,{"_o$ jL____ i
I!W.,'I_._. .... II I IELEVON i I
_L_
]-A(C$
F-f06

(30k_
|tJpUT_.')
1
_ P.UDDEe. _ RILR_
f 1
FbT
c_,Noc_ j
t=E£ I,.
I I a_. &_R. D_Ta
L_ _.J eo_ Pu're_c
F-_o6

Go
!
F-I 1 1 Pitch Channel Functional Diagram

CO
....... J
F-I 11 Roll Channel Functional Diagram

(30O'_
Ay
LD6 GEAI:_
ONLLDGC_AR
YAW I_T
II
L
S'_T EM C,tdNS
5--_: ,_ "_/_c_c¥
=32.2
_-_-17_'".c_'_"/'_P
YAW CHANNELFUNCTIONAL DIAGRAM
F-I 1 1 Yaw Channel Functional Diagram

Co
PILOT INPUT
{
SENSORS
CO>LMAND
AUGMENTATION
DYNAMI CS
MODEL STRUCTURAL
FI LTE R __ GAINCHANGER
PREFILTER
ZERO CROSSING
DETECTOR INTEGP,ATOR I
AERODYNA>Ff CS
--m- LIN]<AGE _-<'_---¢_
DYNANiCS
F-I I I Adaptive Principle

CALIBRATIONMODULE
_,.-==_--_TOPRE-Ak',PL(FUNCTIONAL)TOFOLLOW-UPPOTENTIOMETERCFAIL-SAFE)
BALANCE
r'SHAPING AND TRACING 1
I MODULE 1""-. _ I'F-- l_.J...._J AIRSPEED• l JI"_ I IJH_;AM_'_ I COMPENSATORI I DEMODULATOR I I / _ . I
-:-N AND I _ I ==1p,TOTII MODULATOR I /" ! l=_ STATIC
I --'T'--'_-- I RUDDERI | J l i I Traml I I IFA'L-SAFEI ! '' i I I"N_;_O"_'I' _I P,LOT_L--, ! I I I _l CONTROLI----
l"ll_V 400 CPS
STABILTY l
AUGMENTER IACTUATOR
IFOLLOW-UP
POTENTIOME TER
l MODULE
IIII
I
L_
SERVO
AMPLIFIER
MODULE
II POWER SUPPLY I I _
VALVE DRIVE AND
QUADRATURE
REJECTIONNETWORK
1SUPPLY
R£G B.I-TO MODULES
44V DCTO PILOT'S CONTROL
AND FAIL-SAFE
I,'I_l-' I15V 400 CPS
I II_V 4.00 CPS
L, ........
! J ..... HYDRAULIC J:::::=t 5HU,TO; F L.. / SERVO ..... VALVE l
i -- :_---_ J SYSTEM
PlLOT'SIFLIGH T i::]
........ CONTROL I:pUT ........ .......... _ I
T-38 Stability Augmentation System
88

o:)',,D
IFI_ E
CO_4PU*'ER f ! CCUPt__q ! PITCM
J - Z COMPASS" F._ PJIF'Ec'rlONAI'. _
A_::A OP ILS ! I
LCJCAUZE_ I--- I_ A_D IR_CE|VEm | -- S-'A e ILI_TICIN r
I | rll?E .... _ f|q)
; I ÷.'_1÷,_11
L__ ;,_I --l
AMPLIFIER ¢rVOOE-R
flq)
[........L._ UN,T j
I
I
i L.I t A T,Too ---n'[ I J I I
_'ECE IVER | I .... " / , / _ ,_
...... _J ,, / ;
I ,i,:. ] L[ ii CO':_:OL I
NOTES'-
DOTTLE0 LINCg INO_-._TIE S'LOCKS, TO BE INSTALLED IN _ _RE.
're INDICAT{_ BLOCKS" THAT ARE PART OF THE I_I.IGL.rT CONTROLI.£q,
_PJ"/7_ Sk&_Eo 13(.0CKS" It_UICATIE AUTOMATIC GAIN CONTROL._
I_ THE AIC_E_'.D COMmENSATOm
f Iq I INDICATES" GAIN IS, VARIED AS" A _'-U_K:TIO_I OF' _IF'FERIENllJllI. PI_I_JSI.I_E.
F ICAt.
e(q)
-, ]TO
l AMPLIFIER E_.EVAT
[ J;;%. _. t
I TRIM E_ ¢-VATOR
ACTUATOR T_IM C._G I,,_ _
AVRO CF- I00 Autopilot

_J !_
05s+ I I.__.__J-
ROTE:
There is no PitchAxis in this auto-pilot.
FIAT G-91 Lateral Diagram
9o

x.o
BEEPTRIM _ TRIM
COMMAND ._ MOTOR
r"- _ -J_ _ -T
[ LOOP ERROR jFSp,
LONGITUDINAL_ _ BUNGEE
STICK FORCE [q
STICK ]FORCETRANSDUCER
_ CO.AN D __MODELSHAPING
Nz,
NORMAL -'-
aCCELERATION--_+_
q, _KN tPITCH RATE Zq
i
_SP
LONGITUDINAL o..... ..t MECHANICAL L_
STATI C PITOTPRESSURE DIFFERENTIAL
PRESSURE
INNER ELEVONSERVOACTUATOR
r"t"TO TRIM ACTUATORI
,,Boo hl FREQUENCY_BEI':DING[FILTERSHAPING/I.GAI N I"1 AUTHORITY
AIRSPEED
_ei,
INNERELEVONDEFLECTION
_aY,
OUTER
ELEVON
DEFLECTION
OUTER |ELEvONSERVO /
ACTUATOR|
Viggen Pitch Axis Stability Augmentation and
Control Stick Steering Mode

x.OIX.)
BEEPTRIM _ TRIM
CONV_V_NDI"_ MOTOR
r"- -- 1
i LOOPERROR_.j
FSL,
LATERAL FI BUNGEE
STICK FORCE
STICK
FORCE
TRANSDUCER
LATERAL
TICK DEFLECTION
M_c,_,c_L._J,NNER AILERON
EARING j---"lSERVO ACTUATOR}
IFLAP EXTENSI ONSIGNAL
I,
INNERAILERONDEFLECTION
L,_ COt'_AN Dh _ay,_,"K)DEL OUER
SHAPING _,__+ AILERON_1 I--TO TRIM ACTUATOR DEFLECTION
IBODYII IGA,N WLVE SERVO(_i BENDING HSHAPING SCHEDULED AILERON
_ /FILTER I I I I iVALVEI'll
ROLL ,-_SHAPINGRATE | I
Viggen Roll SAS-CSS Loop

_0
FRp
RUDDERPEDALFORCE
Ny'
I_ATERALACCELERATION
p
YAW RATE
P,ROLLRATE
INNERAILERONDEFLECTION
BUNGEE
=i SHAPING
I
_J SCHEDULED
*IGAIN
I NDICA'[ED
AIRSPEED
I
TRIM _r,
MOTOR RUDDER
DEFLECTION
l-i glLTER GAIN VALVE ACTUATOR
S 'INDICATED
AIRSPEED i
SHAPING[._ '
I
Viggen Yaw Axis Stability Augmentation System

_.0
PITCHATTITUDE SOL,° .STATESYNCHRO- SHAPING
STICK FORCE
_ATEo_SC"EOOLEOL,'.*AIRSPEED _'I GAIN IALT.+
BEEP TRIM__I=_.=_ - HOLD !
CO_AND AT/ITUDEALTITUDE
,,,HALTITUDE
I_c._ou,_ol._GAINf I
HOLDI
_HAPINGL._,,_SCHEDULED1 1
I ALT. [GAIN i---, HOLD I_
INDICATED
J AIRSPEED
SP, _eiLONGITUDINAL INN[ERSTICKDEFLECTION ELEVON
' I IINNER 1 DEFLECTIONAUTO-IR IM I'_ELEVON l I" _
( I NTEGRATION)JlSERVO- u ey,ACTUA_ _#R N
| DEFLECTION
[s.s0 E EVON; F RWARD S'ERVO
LOOP ACTUATOR
Nz +q
SAS FEEDBACKS
Viggeu Pitch Outer Loops

',,O',jl
ROLL
ATTITUDE
HEADING
SOLIDSTATE
SYNCHRO-
NIZER
tSTICK
HOLD
._ FORCE #if
STANDAR ,_JSCHEDULED L
TURN -'1 GAIN I-"CO/VWIAND 4'
INDICATED
AIRSPEED SSTDI SOLID I
I_, _ STATE L..]SCHEDULED IHEADING -_i SYNCHRO-I-_GAIN
[NIZ_R I" t
_SL
LATERAL
STICK 8ai,DEFLECTION INNER
L.J INNER I AILERONJAUTOTRIM AILERON L DEFLECTION._
E INTEGRATI ON)I "I SERVO [| (_ "ACTUATOR | I ay,
OUERr--- AILERON/ DEFLECTION/ I OUTER I
+_ AILERON L
S RVOI"_ ACTUATORI
ATr-_'_p, LoopFORWARD
ISHAP'NG'I _O_L RATE
FEEDBACK
STICK INDICATED
FORCE AIRSPEED
TURN
Viggen Lateral Outer Loops

STICK
POSITION
GENERAL BLOCK DIAGRAM
FOR ROLL AND PITCH AXES
MECHANICAL, GEARING J
GAIN 8=MODEL
SHAPINGNETWORK
AMPLIFIER& AGTUATOR
R_EFEEDBACK
ENGINES &FUEL CONTROL
IATTITUDE DYNAMICSFEEDBACK
RUDDERPEDAL
POSITION
YAW AXISBLOCK DIAGRAM
HN'SHAPIN G I I AMPLIFIER
ETWORKS, ' I-_-_G_ L'-'t AND/_ I S,ERVO
RATEGYROi I TILTLACTUATOR i
1
VJI01-C
96

-4
tateral-direclional _1
commandsII-
Rate_ro I
_ I Lateral 1 I
- I directionalII vehicle I
=i dynamics: ]
Rategyro_shout arm I
structural filter I
_-p_p
M2-F2 Lateral-Directional Flight Control System

_0CO
i
I
I
I
I iIJ
X-15 Pitch Axis Configuration Block Diagram

AUTOPILOT i
' j
X-] 5 Roll Axis Configuration

m
E_
E
×
I
IL
q-- ---
REACTION CONTROL
i i
II l NE_N_ .C,_CTIr_
I
II
X-15 Yaw Axis Configuration
1O0

& / _.. r.,u,-,-_, " _'_,_avo
_o_.._ _._
k'dlyCl_
Q
i
I
II
.-."_ _ ..,!......_-,,_..-=...,-_
I rO_.LQW. U_
ELEVATOR CHANN_
B-707 Autopilot

PO
[_>
®
B-707 Autopilot

S
oN
U I[CqAU I CA I.. LI kl _'_
_;[T IrOI *, M&](II_iUM _"rATl¢ _ILAlli • --i= •
.... , ..... _/... _/,._ _'
@,*'_8 S L * .2_1S * T_. wo_.T
RUDDF_ CHANNEL
B-707 Autopilot

V, Zgs
(2_.0(.oz_+1)(zs,,)
_AS_C ?_TC_ STABiLiZER
IIII
IIII
J
Ok)TE_ LOOPS
DC-8 Pitch Axis

6
_C
13ASIC _,0Lt. STA$_L_ZA-_ION
_Os J IJ/
IL_ OoC.
Vos'_io_ 6_vvo
__-I E/M L S=
5_,,o| _-"C======-
_OL.L PAT_ A_) NA,_/ _AODE_
Aux. May.
0,,4"o,el 12" "
DC-8 Roll Axis

YAW STA_,_LlY__AT/0N
_r'_
ILS O,C,
DC-8 Yaw Axis

o-q
ILl
_E
.,(
0¢
U.
m_
BEAM
_ GEOMETRYSIMULATION
LATF_J_L A/P AI_ON CHAA."__=LLOCALIZL_ _,q_ V. 0.R.
DIRECT GYRO I• & /VP COUPLER
VERT GYKI_ 1& A/P COUPLER
BEA_
SATURATION
OUTPUTLINIITER
Error &
4
i _
RADIO LAG J
LOCALIZER 2/S.2 I
V.O, RL.1/1.SS 1 J
LaggedBea_ Error
InLCgrator CutoutUntil B.C.C. 0_erates& For $H Operation
I INTEGRATOR |
_/S=O.O?41S LOCI-_-
W/S=O. O81/S VOR___._
-IMODULATORAMPLIRER
BEAMCAPTURE
CONTROL
DATA SMOOTHER
I LOC
J_--_ WIS+W ......
W = 1/10 V.O._ TRACKW = 1/3 V.O. _ CAPTURE
ROLLLIMITER
I
ALTITUDEATTE,=_UAT0 R
2---
t LO°C'{/.O. R.
DIS PLACE_AENT I
LPAITER I
I
AILERONSERVO
RUDDERSERVO
L- 188 Autopilot

Co
PITCH RATE= GYRO AND
A/P COUPLER
_ I VERTICALGYRO
m u
._ INTEGF,. ,R _it
• _-f:vdt-/
ft
Engage; i700'
O isengage;200'
Beam_Reference
IIIII
OERIII
: I
II
ANALYTIC MECHANIZATION OF BEAM ERROR
OUTPUT LIMITER I
i -11
I
LONGITUDINAL A/P IGLIDE PATH MODE
I ELEVATOR ISERVO I
I
1.4AXIMUM iINTEGRATOR
INTEGRATOR
RADIO LAG3
$÷2 E It
Beam Error
MODULATORAMPLI FI ER
DISPLACemENT i
LIMITER
LL
"(
Switch "ON"6]Ide Slooe
Engage
L-188 Autopilot

r I
6".O
Present Heading
Reference -_7 \ SwitehforPSHCl°SedMode [t4
i--------J, I DIRECTION [ HEADING j+p_ --
I - ' GYRO AND I = I INTEGRATOR + + )
, ¢ j VERTICAL
- ,-----"i GYRO& j< i IA/P COUPLER]
CONTROLLER 1 "_ ?_
I I
i.Switch Open when A/P Engaged
J F-O"".1_-_ Fixed Exc
r-A---_--- 3-- _: ]
I{' ] YAW RATE
--_GYRO & A,' P
[ COUPLER ]
l AL J ACCELERO.
I_______J----_, '.(ETER J
I IAT_RAL
Swi ch J> J WASHOUT SYNCHRONIZER l
' Cl_,_ed [ J'__4 Sec after AlP engage !
I_.. _ _ I'.--.=i_=,,,,o,,A/,ao_a,eI_VP IL _ I I
L_ I_2__ __ _ _'2 ..... J!
Open for i ---RATE lI A/, _ _--I!FE_D_ACK_---_ .... ---,:,,gage I I _, F'_ f J
J HYDRAULIC ' LINK '
I I I [----"I & MODULAT. " ' " ,
1 lm ' ' I lING PISTON t l
I _ SERVO J ' IMAIN BOOST I I
j I'_'---"Or_ AMPL'F'ER I I SPOOL I i
Ii FEEDBACKL
[ HYDRAUL,CRAMJ I' I
.i,XL
g li ........
RUDDER S ERVO
l RATEFEEDBACK jL" -- ]x.p
J RvoT_ HYDRAULIC I
I AMPLIFIER I& MODULAT-
J _ SE ING PISTON
I AMPLIFIER I I
I
L i FEEDBACK
I
t
LINKAGE I
MAIN BOOST J$ POOL
J,I HYDRAULICRAM I
_,xk
J J
uJ
ri-
M.
OC
L- 188 Autopilot
I

LI.
I LOHGI_u_DINA L
I_._ PITCH RATE
GYRO & AJP-COUPLER
._ VERTICAL GYRO J
mv/e,2ooNV/Pe_.JPROP ERECT to _Deg.L_Erection Rate= I -
-_----_ ,f2O Peg/SEC/Oeg. j
+
ALT SENSOR I
AIRSPEED ERRORCOMPEN$ ATION
e
I POSITION t 8E
RATE Xmp
FEEDBACK -- ---- 1
J
SERVO AMPLI FIERAMPLIFIER & MO'DULATING -- --
PISTOH
L-._ m _
I 0UTPUT LIMITER I_
ELEVATOR S ERVO
LINKAGE
I
, t
I MAIN BOOSTSPOOL
HYDRAULIC
RAM
, I XL
6E/Xp
SYNCHRONIZER
I _ Switch Own when 1
A/P Engaged i#' INTEGRATOR ' I ; P--o"_ FIXED EXC, |
Pitch Control 1er Up lit itude
F
t'4" FLAP POSITION
TRANSMITTER
& ATTENUATOR
lIIIIIIIJIII 6E
iJJ
,,,(
u.
i
J
L- 188 Autopilot

PQaCE
PLOT
STICK-FgNC(
ELECTRICAL GNNC_MkIANO T(RM
I
LAI; ClI_:UIT
_'--t * 4.7 V(_-TSI÷_ VOLT
S'_&IGHT THJeJ 6A/N
I 2:2_ 10_O7)$
[
roSE Sill
ou_t.rnJOE
RAI"E G_mO
-----4 t 1+2(I)S 4""--_" _')tSI 0(G_JEC I:
114_Sf_qS_q NCmUU. _
1.2 VOLTS14" _(L06)S 4. s8 9
II
._ (I+A,S+A, Si)I'Iz ._i I
6 -,nc_u_r Ij
F_
s
vN_
o6
CUtISS
TIP_ _STANT
LAPLACE TRA_SFOP_4 VARIABLE
STZ_K MOTION Q_ANTITY
STA_ILATOR DEFLECTIC_
_CY OF SHORT PERIOD N(X_E
KZPt_RAJ_ ]4OT'r(_ QU._rl"r'l'Y_CRSPIU_
IIOI_IAL AC_LERAT IOi
GESAC Pitch Channel (F-4A)

m-io+_1-1,+_FELECTRICAL GAIN
COMMANO TERM
ATTITUOIE GAiN
ERROR TERM
I+1- z.o --_
__ 3 46 Va.TSS VOLT
CAINAJ_t.IFR_ S_mE5 58m_ LOOP
b °++°Is,I'*'-1 I _'1 I'+_+_, I 12.7 DEG AlL_ = 14"GI S iNCH
AIRCRAFT_I_OYN_S/MCS
LAG CIRCUIT RATE GYRO
I+ z_'s+ se oe_sec .
i
W _GNN
I -I-oz+P
C_s4CI_.LI_R
l co_o_-m,-+,'_-'+L
,. ,_+-..+'+'-Tr
IC_. e._,,+,u_
8_ - _J_:_os VEFLZC'rIOH- Ro_ _-
_ ROL.LRATE
GESAC Roll Channel (F-4A)

Iil_.--°RUOOEG RUD
GAIN I S_RIES _ & LATERAL.
CHANGF_R _ POWER BOOST _ ACCE1.ERATIONAT CG
l'i t- VOLT I-m.d_.J_ . 21 s S 2
IATMAXG_INt- i(l+_)(,+_ ) VOLT '+-_--+_)z _ 573g(I +T, S)
LAG CIRCUIT
= _ 1+2S VOLT
STRAIGHT THRU GAIN
VOLT
CANCELLER
I 274(0033)s VOtTS_! I+(0033)S VOLT
_a_ORMER RATE GYRO
-]-.-_- -_-f-l--ln, Z(.S+ s_ _c
"_A_FORMER LATERAL ACCELEROMETER
0.4 _1----t I+z(J)s+ s g n_II _-_ I
-IJuP_,c]g 'rR;mSFORM V,_ABI, Eof _ RUDDER DEFLECTION
w-FREQUENCY OP DUTCH ROLL MODEAI A2 -AIRFRA/4E. MOTION QUANTITY
V - VELOCITY
_..-EFFECTIVF CONTROL MOFIENT ARM FROH CG
_V - YAW RATL
- YAW ACCELF:RATION
GESAC Yaw Channel (F-4A)

-w
Is",1o.5 s+l_._t . ±;._"-,..__6_s+,._7._1] i, "¢,BENDING FILTER I lOWLy
c.,_Eo_> I },,,,
css
F_,I $Y.1
SERIES ,SE,RVO POWER
ACTIJATOR
Adaptable FCS Pitch Stability Augmentation System (F-4)

k..n
l LATE RAL [
STICK FORCE
(LBS) J I
I ROLL RAT+RA O/S[ E
YAW RATERAD/SEC
Adaptable FCS Lateral-Directional Stability Augmentation System (F-,4)

5 VALUE i
ACCEL. O+S.)_ "i'O.,2s) CIRCUIT J
IPIrCH_rrl ! _=S
! "_'° F_,+o._s.sRAD/_Ec
I_AD .
[E L E VA TOR'_
!P°""°" i-7 z_.z.
I I IA,,,o,.,,',I! _-_ VALUE I
I +0.3Sd
I -Z_.j ,
_,-F'_[_,_,.,._-.35 i _-,,aS
NOTE :
Z_ - 0.,21+0.35
Adaptable FCS Flight Condition Identifier (F-4)
I pITCH ._A_; J
RAD/SEC
PITCH RATE H 0.75,5GYRO I + o. 75-5
o._s I I I
MACH | . OTHER.'_._
ERROR I M H_OLD
AANGLE OF l RAP
T TAC K ERt_
. OT.ER J_LttJ'"_'l -I 1+o.3s5 I+ _
o( HOLO
PITCHATTITUDE_ J. I+5
HER_
- e8
NORMAL I FT/SEC_
A CCEL" r__,, 15
_E_ I,+lOSi 9(I-SECO)
I-1"105
PRESS.ALT. !RATE J'FT/PSEC
I BARO. ALT. I FTERi_OR
,, -t --t---{L,_I_I I LIM_T!
1 1+o._5 I I i l+°-_-s Ii_+o-,'_>1I I.."_-,,I
HOLD
: I !, I+o.osE I -OTHER
E÷p,
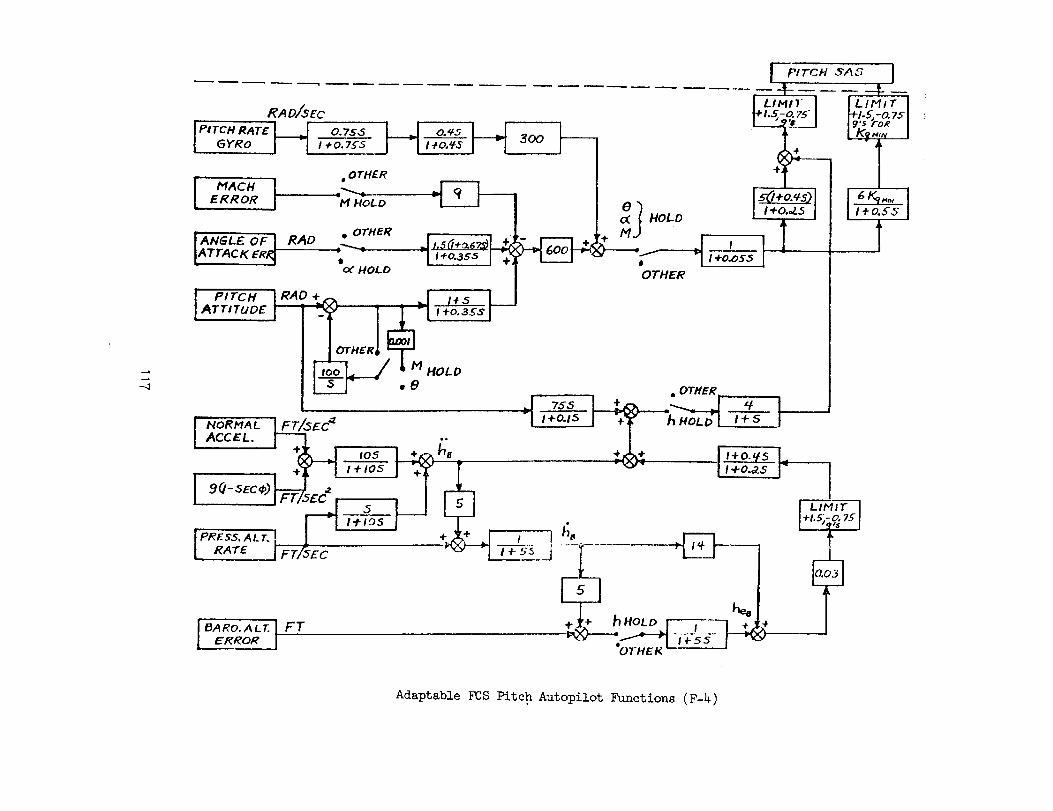
Adaptable FCS Pitch Autopilot Functions (F-4)

L{.. LATEF, AL .....____ -_"_r_]LIMIT ,
+- t.5/_Ap/5_ct' (RAD/._'Ec)
LIMIT÷I.S K=,
ROLLATTITUDE
HEADING
RADOTH F R"/tH E A DIIVG _"
HOLD . TA
ROLL ATT.
HOLD
f
. 3
I HOLD
I LIMIT ! i I_1 _-o.l_s _ _.7K_ L_
_ (ZAZ)) ' '_"'
Adaptable FCS Lateral/Directional Autopilot Functions

•: i :: I _-J
F-_ SFCS Pitch Axis

8.'F-_ _c:i._'[ _:_S _T-,,'T
eL s_
eL
-'-I-" I--
• .
® -,..,,
® ,-..,.
----- AmO aP
lama0npU_
w,,,tO_ regal

T,.im._:_|
lab ¥,IV,Tt_|
iva,,, vl+n+r } j__;3_V B
t..
_dW
Fdlw
OV_G_V I'_"_ 1 lID_mn_ FwcliJ G_nlld
Gm'Ul
MI_ ._Uclz l_mllm Gaw
I<U& 10<U_ I%311>_lll< I Ittlh N l.m,G_,,n <10 <30
IC0 0325 O IS O0 IL0 0+.31_ LII IL0
KI 00 G0S 0*2 L0 O0 IL_ 0+0 0.li
It I [ Oil3 117 tit 3_13 m 117 m IIJD
Ne_ C,_nC.l_._m T _SE.
YIw O_f
I ':_,_. _-.a.,,_ _ I /
_ I I I "+'00"I I I "--+
i Slmml _ll_Im" A,_II_ Cvl:r+'_
w _
ItFI I 412,711
t+.l 20 lJ - |0
t..:, ,ILO
llS O2S - 1,0
I_ Ills -+30 d_
ut4t _II
DZ-I SO+ :_4-SS_1
F-4 SFCS Directional Axis

roPo
Switching Logic
V 1 = 1.66V
V 2 = 2.42V
V 0 = 4.56V
BIAS = 30°e
+SMRD_ 1SW =C 1+C 2+C 3 +SMRD0 2
Note: 0 to 100% Modulation
Occurs for Range of
0 to V 0.
BIAS
Variable Nominal
K 1 0.5
,K2 15000
K 3 6.0
K 4 TBA
K 5 TBA
K 6 TBA
K 7 0.843
K1S + 1
K 2 ....
S+K 31 [S+501 [S+501
0.166 _-_
Comparator C 1 I _ Comparator C2
_x L1 0.6VlDeg,-----_
c_ R1 0.6V/Deg_
o_ L2 0.6V/Deg--_. 0.166 _'_(x R2 0.6V/Deg==--_
IS+ K 31 [S+501 [S+501
(_1 g/Se_c K7S _1.._ I0.12 V/De KIS + 1 J
I Range
0.25 --1.0
TBA
3.0- - .12.0
TBA
IPulse
Width
Modulator
4_ Co mparator C3
T[S 4- K4] [S + K51
SMRD (_1
Logic and
Switching
To CVU-1
Logic and _--
Switching _
I
Logic and iSwitching
-_ To CVU-2
•1_ To CVU-3
---_ To CVU-4
Logic and /I
Switching _
SMRD0_J
F-4 SFCS St&ll Warning

Electrical
9ack-Uo
L__ Back-Up
Switch ITOLO I I[3 .... _1
Swi_chl_ _ I IL_L____1 " TOTBiN..... J
Coo,ro,.No, ., 1'IDisplay I = _ I
P,,_ L EBuO _j, vGoO ! _L .... .J
Demodulator
Velocity Sen_ng. _:_ Channel 4
Comparator, _ Chlmnel 3
Shut Off Logic _ Channel 2
Note: 7"m " 0.035
M;_-_S_ ,_. 1 Na- 2. 3. or 4
_J • # _,/-_) I $11500+ 1 I Number of U_its
. -- T k pW / J _0_
i I
IDemodu;ator
LVDT
Note: Dashed liner denote mechanical paths, Solid line= denote electrical paths.
F-4 Survivable Stabilator Actuator Package

(_1" Bandl.)as$
I I and Log,c I
] ' J,._ ! i _lI |Ou at I hre_h°tdL----------Mon,,or
I,0,-,o,I] "'°I =-I i_o°_o0,__
-I_ MonitOrsig,.., 1 /A------------_ v;._ I/ / and Logic J
/ Controlled I/
Reference'--_ 1 Oscillator jj |Dual ThrcsholdL__
"_l Monitor L_
I) b I I
Status
tD,.A
M6c
To CVU-1
M6c
1o CVU.4
Adaplive
"-_ Gain
Slat_ts
F-4 SFCS Adaptive Gain Changer
124

$Cp
[j_!Ckle r_,Ser vo _ Servo i J EcloenVT;_r
[ FoU--G--_T-up-]I, -I and
I /tachometer]F- "'-- -- ---..... ----- --
l .......FL___ Amplifie, |[ Canceler
_-----lond motofq-q selsyn
II Follow-up canceler systemL__ ................
D eAirplane
Pitch }_>_........role gyro
Veriicol [gyro (pitch) <-
Grumman F9F-2 Attitude Command FBW

I Yaw roteI=I gyro
I PenduIum L1-
_z_.__ Amp,ifier L ] Canceler!
1Canceler system
........... J
I
Follow-up and Ltachometer ] I
ber v0 ___4 ':'ervo _1_controlamplhier 1 i motor] I _,,4tZ,_,J J
1
_ Ser,vo ]_ Aileron lSoJ !
om#ifier _] motor I-T7 control
_'- ,_---_ I Isystem I I_71 1' --
and _--- 'I tachometer
[Roll rote]_gyro J
[ Vertical 1[_yroIroll)j"Directional]
gyro ,7. Note: Directional gyro isdisconnected from systemwhen contro! stick ismoved laterally.
Airplane _!
(b) Roll and yaw channels.
Grumman F9F- 2 Attitude Command BFW
126

_o-4
HStick
controller j>--,<
Servo
amplifierServo }
mot°___:,I_and
[tachometer
;IElevatorconlrolsystem
[_, _. / AmplifierJjCanceler
Follow-up canceler system
Pitch _..rale gyro
Airplane
(a) Pitch ehannel,
Grumman FgF-2 Rate Command FBW

rooo
6op
ontroller I ";
Servo L__] Servo _::_rt:_e_i;'_ lamplifier[ 1 motor I I . //
i , P L_ . I [system It| [TO I1ow-uP]l
_ chom_ter]
',.... _*m_o__o_e%_,, - I[II l _r !'nd m°t°_ '''':<n I lI
I Canceler systemI
J[r Pitch lt,e gyro i
!
irplane]
a n
•
oromcter :--
)
Grumman F9F-2 Normal-Acceleration Control System

_TRUC TURAL FILTER
3+JE_- #+_Z I _ZtOgJ(TZ)S+ 7Za
$* _.? #_._r[ #__s_ $'+t(.Tj(c_o)s+ ¢o_,So
IG.$....._ I I
I _G._.._.COMP U T A "_P
...........
It
I
3TIC_
e" F"l_
•4/R _AM&"
DyIv/;MIC5
,t4*t
fo_ .._Y3TEM _t..OCK OF" PITCH C.A,$.
OIV_ ("H/JNNEL
TWEAD I Pitch Axis

,4o
##
L_TI r-T-I
_-_--.-t._v/,.o_--
9
-- ÷1
\ I
I
-.-_-_Z__.,,o._,,#---,,,.
a_t
TWEAD I Lateral-Directional

i AIRERAFT
i NOI_4AL
i ACCEL_R,_TJO#
LsrATro_JJ
FEEL _IPRIN_CAPJ1"I_.tevE
i
i
TWEAD II Longitudinal Functional CAS Block Diagram

i_.-L
q-C. F='°"
i.iro
I I
P:I
I
I
I
I
r,,.,,.......,it,,., .... "ll-cs.,.,;,,- ,,) "7, _ L;,.---_,;;-° .,,.---_jLo=.----_..,.,,,--_,jLc,.,,e_.,,,,_==,,a
F-kC TWEAD II CAS Lo_itudinal Block Diagram

C,,Xj4
L lrl'_Kli L5-rick
Po s m o_
£1
Ib_
c omm,_oso _/_
i+<,,..,++..'¢
Ruo_
.J_ P'EDXLFore
1
I /q/L E*RO/_Sa"R/6"3
S_r_ VO
-+?.S'"
I/ !
/+ s !
12UDD_'I_ i
,.,_ L,,O
I
I
I
_4
20.05" °¢°4_
,,+/cLJ_TERA L
ACC£LER,#-/'/o,v
1'4,1J:__r_AN ICAL, PA_" t,_
TWEAD II L_teral-Directional Functional CAS Block Diagram

,7,,,
II
F-4C TWEAD II Lateral Block Diagram

kJ]
PILOT'S STICk.
WITH SIMPLE.SPRING rEEL
PICK C)_'I=NO_.I
1
PICK OFFNg_
0O
I It II " " _ I
'l! II ELECTRIC SPRING PITCH CON'r._OLLER N_I,I I., _T__ a-fRo _a I (rTxEo_a_M, aTER©el
ELECTRIC SPRING RATE
GYR.O N ° 2,
o-s(s+4)(s+_s)(_+o-¢)33
PC_.T
ELEVATOR,
IELECTRO - ?
I.qh'l:)R A.U LIC II
M/%IN POW_.?. I5EP.VO -".....
//
/
pI,,
----- / SPRING _.K'v'ER5i ON:IF
laaaoaI >a"BETWEEN
_ELE.v_,a-o_.sI
I
STA_BOAI_,D
ELEVATOP_
AVRO Pitch Rate Demand Control System (Duplex)

O_
PILOT'S STICKWITI4 ¢JtMPLE
SPR.|MG FEEL
IMojI
PICK OFFNO ?..
o-'_5(,+o-os_)0 ÷o-ol_ss)
CO,_T_OLLF_R N °_ t
FI_F.D PA_,_,M -:T F.._,S
0"5)C37"7)S'i"_7"7) ?"
ELECTRO - HYDRAULIC
SEP.VO
I
Ir
:ON'TR.OLLER
AUTOMATIC
P..EVE.P.SIONIF
GYRO FA1,L5
ELECTRO - MECH./kNICA,L
ANALOGUE. OF AILERON SE.RVO
AVRO Roll Rate Demand Control System (Simplex with Comparison Monitor)

RUDDF..R.PEDALS
_,v'ITN SINIPLE
SPRING FEEl.
L_L:_L.J _,_,,_ GYR.O M°_.Iii
"_P" O- S S _ _)___IFELECTRO t-I'YDR, A,ULIC
+ o- s s " I s_Rvo/
.,G. PAssnl.T_R(FILED PAP-JkMETN$)
i
y- O "5S
I + O'Ss
ELEC.'I'RO - MECHANICAl.
ANALOGUE OF RUDDER
ELECTRO HYDRAULIC5ERVO
_UDD_
A,U'TO_A,TiC
R.EVER.SIONIF
IER,RoR,I > 3°
AVRO Rudder Control System Including Yaw Damper
(Simplex with Comparison Monitor)

LONG [TUD[_JAL D[AaHAM
LATERAL DIAGRAM
F-tO0 Lear Rate Integratlng Autopilot
138

2_FESENCE_
I • Johnston, D. E., and D. H. Weir, An Assessment of Operational and Cost Tradeoff
Factors for a T_r_ical High Performance AFCS, Systems Technology, Inc.,TR-119-I, June 1962.
2. "TA-4F Accident Provides Some Costly Lessons_ Approach, Vol. 15, No. 8, Feb.
1970, pp. 36-41.
o Schuetzj A. J., R. L. Fortenbaugh, and W. E. Becker, An Aerodynamic Stabilityand Control Data Summary for Several Selected Militar_ _Aircraft_ Volu_eI: Conventional Aircraft, Naval Air Development Center Report AM-7106,
28 Sept. 1971.
o Burtner, S. K., and Charles T. Garrington, Automatic Control and Stabilization
S_steml En6ineerin6 Report, North American Aviation, Inc. Report NA59H-238,19 May, 1959.
_. Hilburger, E. A., Control Systems Desi6n Re_ort for A3J-I Attack Air_lane, NorthAmerican Aviation, Inc. Report NA 59H-98, 10 Apr. 1959.
6. Simulator System Test Re_ort for A2F-I Airplane t Part a, Grumman AircraftEngineering Corporation, Report No. AV-128R32.0, no date.
7. Seth, W. A., A-TD Estimated Flying Qualities, LTV Vought Aeronautics ReportNo. 2-_3320/8R-8089, 15 Jan. 1968.
o Bielka, R. P., A. P. Kavalok, W. L. Johnson, and R. E. Reel, Aircraft Fli6ht
Control Systems Field Safety Experience, Air Force Flight Dynamics Lab.TR-72-33, May 1972
9. B-_2 Autopilot Modification, Boeing Company Document D3-4360, 15 Mar. 1962,
presented at the Boeing Conference on Manned Vehicle Flying Qualities,I_-16 Mar., 1962j Seattle, Washington.
10. Newberry, C. F., B-O2 AutopilgtModification , Boeing Company Technical PaperD3-4525, presented to SAE Committee A-18 Aerospace Vehicle Flight ControlSystems, 14 June 1962.
11. B-_8 Flight Control S_stem Air Force Review Board, General Dynamics/Fort WorthFZE-4-049, 6 Nov. 1962.
12. Rabenberg, B. E., and J. J. Gondek, XB-70 Fli6ht Control System Summary TestReport, North American Aviation, Inc. Report NA-66-360, 30 Sept. 1966.
13. Flight Manual --USAF Series C-130A Aircraft, Air Force T.O. IC-130-I,I0 Jan. 1963.
14. Fli6ht Manual --USAF Series C-133A and C-133B Aircraft, Air Force T. O.IC-133A-I, 14 June 1962.
19. Flight Manual --C-13_A and B- , Air Force T. O. IC-135A-I, I Mar. 1963.
16. Tomlin, K. H., C-_ Flight Control Report (Aerospace Vehicle) Stability and Control tLockheea-Georgla Comply Report No. LGIUS#2-1-1, I Oct. 1966.
139

17.
20.
Jamison,GeneS.3 C-SA Flight Control System, SAE Paper No. 670574, presentedat the Aerospace Systems Conference, Los Angeles, Calif., 27-30, 1967.
Fling, G. K., XC-124A Control S_stem, SAE Paper No. 670571, June 1967.
Hart, John E., and Harold A. Valery, C-5A Flight Control Report (Aerospace Vehicle).
FllghtControl Subsystem. Volume It Lockheed-Georgla Company Report No.LGIUS42-2-1, 17 Dec. 1966.
Shields, M. E., Estimated Flying Qualities XC-142_A V/STOL Assault Transport,LTV Vought Aeronautics Division Report No. 2-53310/4R 939, 22 May 1964.
21. S-_A Automatic Thrust Control System, Naval Air Systems Command, no report no..no date.
22.
23.
24.
Guion, H. D., Re6ulus II Lot I Autopilot q Section IX, Chance Vought AircraftService Training Manual, 11 Jan.. 1996.
Preliminary Flight Manual DSN-3 Drone and Target Control System AN/SHW-4B,Bureau of Naval Weapons NAVWEPS 01-150DHB-1, I Jan. 1952.
USAF T_e A/A37G-3 Flight Control Subsystem of the Type Q-2C Drone, RyanAeronautical Co. Spec. 124_9-2A, no date.
go Seeman, William G., and Floyd H. Moody, Usin6 the Man to Test Unmanned Aircraft,Society of Flight Test Engineers Report No. 16, presented at Symposium
on Test and Evaluation of Automatic Control Systems, 31 Aug. -- I-2 Sept., 1971.
26.
27.
Gerrity, Robert J., Test and Evaluation of a Versatile Drone Automatic Flight
Control System for the B_M -34A_ Society of Flight Test Engineers ReportNo. 13, presented at the Symposium on Test and Evaluation of AutomaticControl Systems, 31 Aug. m I-2 Sept., 1971.
Teper, Gary L., and Richard H. Klein, Analysis for the MQM,74A Drone Control System,Systems Technology, Inc., TR-279-I, Feb. 1968.
28. McEntire, Kenneth G., and E. H. Underwood, Jr., Flight Test Evaluation of the
A-7D/E Emergency ("Rack-Up") Flight Contro_fsystem, Society of FlightTest Engineers Report No. 14, Aug.-Sept. 1971.
29. Dempster, John B., and James I. Arnold, Flight Test Evaluation of an AdvancedStabilltyAugmentation System for the B-52 Aircraft, AIAA Paper No.
68-1068, Oct. 1968.
30. Dempster, John B., and Kenneth L. Roger, Evaluation of B-52 Structural Response
to Random Turbulence with Various Stability Augmentation Systems, AIAAPaper No. 66-998, Nov. 1966.
31. Aston, P., _-2C Pitch Axls Control S_stemAnal_sls, Lear Siegler, Inc., AstronlcsDiv., Inter-Office Correspondence SA69-239, 15 Oct. 1969.
32. Report of the B-58 Flight Control System Review Board_ Sect. VII-A_Aerodynami cTrade-Off Team Report, Aeronautical Systems Div., 5 Dec. 1962.
33. Proposal for a product Improvement program for the BQM-34A Automatic Flight
Control System (Versatile Drone Autopilot), Lear Siegler, Inc., AstronicsDiv., Rept. AD-975, 17 July 1970.
140
35.
Maintenance Instructions _nual, Navy Models F-4B and RF-4B Aircraft,Flight Control Group AN/ASA-32 Series and Related Systems, NAVWEPS
01-245FLB-2-6. 3, I Dec. 1965.
Abrams, C. R., A New Concept in Automatic Flight Control _ Final Report,NADC-AM-6904, 13 Feb. 1969.
36. Falkner, V. L., Functional Configuration of Pre-Production No. 3 AFCS,
37.
38.
39.
40.
43.
Honeywell Inc., SEM No. 115.0090A, 6 Aug. 1970
Hurt# George J., Jr., and James B. Whitten_ Flight Investigation of anAutomatic Pitchup Control, NASA TN D-] 14, Aug. 1960.
Johnston, D. E., O. Imai, and D. D. Miles, F-89 D Sideslip Stability Aug-
menter Operation and F_intenance_ Airplanes N-2216 through N-4_77,Northrop Aircraft, Inc., Rept. No. NAI-_4-767, 15 Oct. 1953.
Ciscel, B. H., A Description of the Honeywell E-10 Flight Control System,
Minneapolis-Honeywell Regulator Co. Rept. R-ED 9048-2, 28 May 1954.
Gaertner, R. V., R. C. Mclane, and V. Baxter, Flare Out Program for AirForce Type E-I 0 Automatic pilot, Minneapolis-Honeywell Regulator Co.Aero Rept. AD5501 -TRI, 15 Aug. 19_7.
Flight Manual_ USAF Series F-IOOC, Air Force T.O. IF-I00C-I, 22 Dec. 1960.
Flight Control S_stems for F-100FAirplane, North American Aviation, Inc.,Rept. NA96-731, 1956.
FliSht Manual_ USAF Series F-101A and F-101C_ Air Force T.O. IF-101A-I,15 May 1962.
44. The Honeywell Flight Boundary Control System, Honeywell Inc., Governmentand Aeronautical Products D_v., Brochure_ADC 364, Jan. 1972.
45. Maintenance Manual a Fli_ht Control Systems, USAF Series F-102A and TF-102A,
Air Force T.0. IF-IO2A-2-7, 5 Jan. 1962.
46.
47.
48.
49.
Fli_ht Manual I USAF Series F-I02 and TF-102A, Air Force T.0. 1F-102A-I,4 Oct. 1962.
Hoey, Robert G., and Louis W. Schalk, Air Force Evaluation of the AutomaticPitch Control for the F-IO4A, AFFTC TN _7-11, Feb. 1957.
Flight Manual - USAF Series F-104A and F-104B, Air Force T.0. 1F-104A-1,I_ Dec. 1961.
Sexton, H. A., Jr., Flight Testing the F-I04 Automatic Flight Control
System, AIAAPaper No. _-328, July 1964.
50. Flight Fenual_ USAF Series F-105B, Air Force T.O. 1F-10_B-1, 15 July 1962.
]41

51.
52.
I_Gue, T., F-IO6A Damper Systems, Convair Rept. DC-8B-135, Rev. A,11 Mar. 19_8.
Maintenance Manual_ Flight Control _ystems_ USAF Series F-I 06A and F-I 06B
Aircraft, 20 Dec. 1962.
_3. Round-Up Review_ Division Advisory Group-ASD_ 21 and 22 June 1968_ Flight
Control System/Stability slud Control, General Dynamics/Fort Worth Div.,
Rept. FZM-12-5964-2, 21 June 1968_ (Report Confidential, Title un-
classified)
_4. Preliminary Flight Control Subsystem Analysis for the F-I 11A/B Airplanes,
General Dynamics/Fort Worth Div. 3 Rept. FZM-12-278, 16 Aug. 1963 •
(Report Confidential, Title Unclassified)
55.
57.
_8.
59.
61.
62.
63.
64.
F-111 Category I Flight Test Progress Report_ Preliminary Stability and
Control/Fllght Control Subsystem Flight Test Results, General Dynamics/
Fort Worth Div., Rept. FZM-12988-13-23 14 Feb. 1966. (Report confiden-
tial, Title Unclassified)
Presentation to ASD Division Advisory Group, General Dyns_nics/Fort Worth
Div., Rept. FZM-12-2357, June 1966.
Sanctuary, G. E., and A. M. Roberto, Low Speed "Adverse" Yaw Flight Simu-
lator Evaluation, General Dynamics/Fort Worth Div., s/C TM No. 52,
_8 Oct. 1966.
Seacord, Charles L., The Honeywell AFCS (MH-I_7_ for the Swedish Viggen
(AJ-37 _ Aircraft, Honeywell Inc , Rept. T-230, circa 1969.
Organizational Maintenance_u_l_ Flight Control Systems_ USAF Series
T-_BA, Air Force T.0. IT-38A-2-3, I Sept. 1962.
Naumann, Erwin A., and Herman Schmier, "Design and Development of theStability Augmentation System for the Lockheed/Army XV-4A," Proc. of
the 20thAnnual National Forum of the American Helicopter Society,
Washington, D. C., May 1964, pp. 140-I_I.
Mueller, Leo J., Some Experiences in VTOL Automatic Flight Control,
presented at t_e SAE A-18 Committee Meeting No. 14, New York, July 1964.
Kempel, Robert W., Analysis of a Coupled Roll-Spiral-Mode_ pilot-Induced
Oscillation Experienced with the M2-F2 Lifting Body, NASA TN D-6496,
Sept. 1971.
Experience with the X-15 Adaptive Flight Contlol System, NASA TN D-6208,
Mar. 1971 •
Lindahl, J.# W. McGuire, and M. Reed, Advanced Fli6ht Vehicle Adaptive
Flight Control System. Part VII: Final Report on Study, Development_
and Test of the MH-96 System for the X-15, WADD-TR-60-651(VII),
Dec. 1963.
gS. MH-_6 Flight Control System for the X-15 Aircraft. Vol. V: System
Description and Bench Test Procedure, Minneapolis-Honeywell Regulator
Co. Aero Rept. 2373-TM1 (Vol. V), 31 Aug. 1962.

6g.
69.
Tremant, Robert A., Operational Experiences and Characteristics of the
X-15 Flight Control System, NASA TN D-14023 Dec. 1962.
Current Autopilot Block Diagrams, SAE A-18 Committee, Oct. 1959.
Martin, C. E., Preliminary Flight Control Subsystem Engineering Report
for the F-111A/B Aircraft, General Dynamics, Fort Worth, Rept.
FZM-12-874, 21 Oct. 1964, (Rev. 26 Jan. 1965).
SJoberg, Sigurd A., Walter R. Russell, and William L. Afford, A Fli_htInvestigation of the Handling Characteristics of a Fighter Airplane
70.
Controlled through an Attitude Type of Automatic Pilot, NACA RM
L56A1 2, Apr. !956.
Russell, Walter R., Sigurd A. SJoberg, and William L. Alford, A Fli6ht
Investigation of the Handling Characteristics of a Fighter Airplane
71.
72.
Controlled Through a Rate Type of Automatic Control System, NACA
RM 106F06, Sept. 1956.
SJoberg, Sigurd A., Walter R. Russell, and William L Alford, FlightInvestigation of a Normal-Acceleration Automatic Longitudinal Control
System in a Fighter Airplane, NASA Memo I 0-26-58L , Dec. 1958.
Russell, Walter R., SigurdA. SJoberg, and William L. Alford, FlightInvestigations of Automatic Stabilization of an Airplane Ha_tatic
73.
Longitudinal Instability, NASA TN D-173, Dec. 1959.
Russell, Walter R., and William L. Alford, Flight Investigation of aCentrally Located Rigid Force Control Stick Used with Electronic
74.
7P.
76.
Control Systems in a Fighter Airplane, NASA TN D-I02, Sept. 1959.
Rickard, Richard R., and Jerauld R. Gentry_ Development Testing of a High-
Gain Adaptive ControlAugmentation System Installed in an F-4C Aircraft,
AFFTC-TD-70-4, Vols. I and II, Sept. 1970.
Rickard, Richard R., Stability and Control Evaluation of an F-4C Aircraft
with a High-GainAdaptive Control Augmentation System, AFgvfC-TR-71-1_,
June 1971.
Rickard, Richard R., Richard H. Kogler, and Cecil W. Powell, Stability and
Control Evaluation of an F-4C Aircraft With a High-Gain Adaptive
77.
78.
79.
80.
Control Augmentation System, AFFTC-SD-71 -I 7, June 1 971 •
Carleton_ David L., and Cecil W. Powell, Limited Air-to-Air Trackin_ and
Qualitative Flying Qualities Evaluation of Selected Flight Control
System Configurations in the F-4C_E Aircraft, AFFTC-TD-71-4, AUg. 1971.
Carleton, David L., Richard E. Lawyer, and Cecil W. Powell, Development
and Evaluation of the TWeaD II Flight Control Augmentation S_stem,
AFFTC-TD-72-1, Nov. 1972.
Howell, G. C., Flight Experience of Rate Demand Control Using Electric
Signalling in the Avro 707C Aircraft, AGARD Report No. 536, May 1966.
Miller, H., and R. H. Wagner, Flight Control System for Jet Transports,
Sperry Gyroscope Co., no date.
143

81. Transfer Functions and Block Diagrams of the SP-30AL Automatic pilot and
Z-14 Flight Director as Applied to the Douglas Model DC-8-60 Series
of Aircraft, material transmitted to STI in Sperry Flight SystemsDivision letter of 29 Sept. 1969.
82. Eldridge, W. M., Lateral Control Augmentation for Transport Aircraft,
presented at the Boeing Conference on Manned Vehicle Flying Qualities,Seattle, Wash., Mar. 1962.
83. Harris, Pat, Some Aspects of the 727 Flight Control System, presented atthe SAE A-I_ Con_nittee Meeting No. I_, New York, July 1964.
84. Devlin_ B. Terry, and Robert H. Parker, "The SP-77 Automatic Flight Con-
trol System for the 737," Sperry Rand Engineering Review, Vol. 203
No. 3, 1967, PP- 26-33.
85. Hanke3 C. Rodney, and Donald R. Nordwall, Simulation of a Jumbo JetTransport Aircraft. Vol. II: Modeling Data, Boeing Co. Rept.
D6-30643, Vol. II, Part I, Sept. 1970.
86. Shah, N. M., G. Gevaert, and L. 0. Lykkeu, The Effect of Aircraft Environ-
ment on Category III Autoland performance and Safety, AIAA Paper No.
72-811, Aug. 1972.
87. Darrieus, Bernard, concorde Flight Control System, presented at the SAEA-18 Committee Meeting No. 20, Boston, Mass., August 1967.
88. Kastner, T. M., and R. H. Soderquist, Evaluation of a General Electric
Self Adaptive Flight Control System in the F-4A Airplane_ Final Report,NATC Tech. Rept. FT2123-49R-64, 8 July 1964.
89. Hannegan, E. A., Evaluation and Flight Test of Self-Adaptive AutomaticFlight Control Systems, Report No. I, General Electric System, NATU
Proj. TED No. PTR RAAV-43021, FT21Pl-39, 7 Feb. 1961 •
90 . Kisslinger, Robert L., and George J. Vetsch, Survivable Flight Control
System_ Interim Report No. I_ Studies_ Analyses and Approach. Supple-ment for Control Law Development Studies, A_'FDL-TR-71-_03 Suppl. 2"j
May 1971 •
91. Automatic Flight Control System, Control Stick Steering, Evaluation of_
Report No. I, Interim Report, NATC ProJ. TED No. PTR AV-37009, ST312-
190, 2 June 1959.
92. Automatic Flight Control System, Control Stick Steerin.g_,Evaluation of,Report No. 2_ Final Report, NATC Proj. TED No. _'±'RAV-37009, ST312-
283, I0 Aug. 1959.
93. Research and Development_ Automatic Flight Control System: Design, Instal-lation and Flight Evaluation in Model FSU-IP, Chance Vought Aircraft,
Inc., Rept. E9R 12185_ 30 June 1959.
94 . Advanced Automatic Flight Control System for Attack/Fighter Aircraft,
Lear Siegler, Inc., Rept. ADR-565, 15 Feb. 1964.
95. Townsend, Marland W., and William B. Rhodes, Fli_ht Evaluation of the LearAdvanced Automatic Flight Control System (AFCS) Installed in anF-SD
Airplane_ Final Report, NATC Tech. Rept. FT2121-63, 31 Dec. 1963.
144

96.
97.
8o
99.
100.
Hillman 3 W. J., and W. Titchnell, Avionic Flight Control System (AFC$),
(Preliminary), Lockheed-California Co. Document No. TB3002,29 _r. 1968.
Hendrick, R. C., A. J. Bailey 3 L. D. Edinger, et al., Desisn Criteria
for Hish Authority Closed Loop Primary Flisht Control Systems,
AFFDL-TR-71-78 , Aug. 1972.
Quinlivan, R. P., Multimode Flight Control Definition Study, AFFDL-
TR-72-_5 _ May 1972.
Johnston, D. E., and R. K. Heffley, Preliminary Assessment of the F-14A
Lor_itudinal Handlin_ Characteristics, Systems Technology_ Inc.,
TR-193-I, Oct. 1970.
Handbook Operation and Maintenance Instruction, MH-67 Automatic Flight
Control System, Publication No. 95-4256B,_y 1964.
U.S. GOVERNMENT PRINTING OFFICE: 1975--635-(_/80



















