Fourier and Fourier Transform Why should we learn Fourier Transform?

Computational Methods and advanced Statistics Tools
I. FOURIER SERIES,FOURIER TRANSFORM.
1. UNIFORM CONVERGENCE
A series of functions is a series where the general term is a sequence offunctions:
∞∑
n=1
fn(x), x ∈ I
where I is some common domain ⊂ R.The series is pointwise convergent to a sum S(x) in I if
∀x ∈ I, ∀ǫ > 0, ∃n(ǫ, x) > 0 : |n∑
k=1
fk(x)− S(x)| < ǫ, ∀n > n(ǫ, x).
The series is uniformly convergent to S(x) in I if
∀ǫ > 0, ∃n(ǫ) > 0 : ∀x ∈ I, |n∑
k=1
gk(x)− S(x)| < ǫ, ∀n > n(ǫ)
If the functions fn(x), n ∈ N , are continuous for x ∈ I, the pointconvergence is not sufficient to ensure that the sum S(x) is continuous.But if the series of continuous functions is uniformly convergent to S(x)for x ∈ I, then S(x) is a continuous function in I.
In turn, a sufficient condition for the uniform convergence of a series offunctions is the ”total convergence” criterion: the series of functions isuniformly convergent in I if the modulus of the general term is boundedby the general term of a convergent numerical series.In other words, if
|fn(x)| ≤ αn, ∀x ∈ I, with∞∑
n=1
αn < +∞
then the series of functions∑∞
n=1 fn(x) is uniformly convergent.
When such a condition is satisfied one can prove that:i) the sum of the series of function S(x) is continuous in I;ii) the definite integral on [a, b] ⊂ I of the sum of the series is equal tothe sum of the integrals of fn(x);
1

2
iii) if, moreover, the general term fn(x) is differentiable and, in theinterval I, |f ′
n(x)| is bounded by the general term of convergent numer-ical series, the sum S(x) of the series of functions is differentiable andthe sum of the derivatives converges to S ′(x).
For example, consider the series of continuous functions
+∞∑
n=0
fn(x) =+∞∑
n=0
1
n3sin(nx)
Since the general term is bounded by the general term of a convergentnumeric series,
|fn(x)| =1
n3| sin(nx)| ≤ 1
n3, with
∑
n
1
n3< +∞
then the sum S(x) of the series is finite and continuous, ∀x ∈ R.Moreover, since the series of the derivatives enjoys the same property,
|f ′n(x)| =
1
n3|n cos(nx)| ≤ 1
n2,with
∑
n
1
n2< +∞
then S(x) admits a continuous derivative S ′(x), which coincides withthe sum of the series of the derivatives ∀x ∈ R. In such a case we saythat the series can be derived term by term.Besides, for any finite a, b with a < b,
∑
n
∫ b
a
fn(x)dx =
∫ b
a
∑
n
fn(x)dx
for fn(x) = sin(nx)/n3, as well as for fn(x) = cos(nx)/n2. In suchcases we say that the series can be integrated term by term.
2. FOURIER SERIES
A function f is periodic if it is defined for all real x and there is apositive number T such that
(1) f(x+ T ) = f(x), ∀xAccording to this definition, a constant function is periodic with arbi-trary period. Trigonometric functions, such as sin x, sin 2x, ..., sinnx,or cos x, ..., cosnx, are periodic with period 2π.Besides exponential functions of imaginary arguments, too, such aseix, e2ix, ..., einx, or e−ix, e−2ix, ..., e−inx, are periodic functions of period2π. Indeed e2πi = 1.If T is a period for f then f(x + nT ) = f(x), ∀n ∈ N : therefore f isperiodic with periods 2T, 3T, ..., too.

3
A trigonometric polynomial is a finite sum of the type
(2) Sk(x) =a2
+k∑
n=1
(an cosnx+ bn sinnx)
Any trigonometric polynomial is periodic with period 2π.Any trigonometric polynomial can be written in exponential form:
(3) Sk(x) =k∑
n=−k
cneinx.
Indeed, for n = 0, c = a/2. For each n ≥ 1, in the equality
an cosnx+ bn sinnx = cneinx + c−ne
−inx
we can use Euler’s formulae
eiθ = cos θ + i sin θe−iθ = cos θ − i sin θ
⇐⇒
cos θ = 12(eiθ + e−iθ)
sin θ = 12i(eiθ − e−iθ)
It suffices to write cosnx, sinnx in terms of exponentials. Thus weobtain the coefficients cn in terms of the an, bn’s:
(4) c =a2, cn =
1
2(an − ibn), n ≥ 1; c−n =
1
2(an + ibn), n ≥ 1.
In particular, if the an, bn’s are real, then c−n is the complex conjugateof cn: c−n = cn, ∀n 6= 0.
THEOREM I.2A - Let f(x + 2π) = f(x), ∀x ∈ R, and let us assumethat f(x) is the sum of a trigonometric series
(5) f(x) =a2
++∞∑
n=1
(an cosnx+ bn sinnx)
or, in equivalent manner,
(6) f(x) =+∞∑
n=−∞cne
inx.
Moreover, assume that the series is uniformly convergent for x ∈ R.Then the coefficients of the series in exponential form are
(7) cn =1
2π
∫ 2π
0
f(x)e−inxdx, ∀n ∈ Z
and the coefficients of the series in trigonometric form are(8)
an =1
π
∫ 2π
0
f(x) cos(nx)dx, n ∈ N, bn =1
π
∫ 2π
0
f(x) sin(nx)dx, n ∈ N.

4
Proof To fix ideas consider the exponential form (??) and let usintegrate both sides of (??). By virtue of the uniform convergence, wecan integrate term by term:
∫ 2π
0
f(x)dx = 2πc +∑
n 6=0
[
einx
in
]2π
0
= 2πc
so that c is the mean of the periodic function.Multiplying both sides by e−imx, m 6= 0, and integrating we find:
∫ 2π
0
f(x)e−imxdx =∑
n 6=m
[
cnei(n−m)x
i(n−m)
]2π
0
+ 2πcm = 2πcm
so that cm = (2π)−1∫ 2π
0f(x)e−imxdx as stated.
By inversion of (??)
(9)a2
= c; an = cn + c−n, bn = i(cn − c−n), ∀n ≥ 1,
and, by Euler’s formula,
cos x =1
2(eix + e−ix), sin x =
1
2i(eix − e−ix)
Thus, for n ≥ 1,
an =1
2π
∫ 2π
0
f(x)(e−inx + einx)dx =1
2π
∫ 2π
0
f(x)2 · cos(nx)dx
and
bn =1
2π
∫ 2π
0
f(x)i · (e−inx − einx)dx =1
2π
∫ 2π
0
f(x)i · (−2i) sin(nx)dx.
The above calculation assumes that the period is 2π. In fact any periodT > 0 can be handled so as to obtain similar formulae for the coeffi-cients cn, an, bn. Above all, since the integrals (??), (??) exist underwide conditions, we can associate Fourier coefficients to any periodicfunction in a large class:
DEF. I.2B (Fourier series) Let f(x + T ) = f(x)∀x ∈ R, and let f beintegrable in the interval [0, T ]. The Fourier coefficients and the formalFourier series, in exponential form, associated with f are defined by
(10) cn =1
T
∫ T
0
f(x)e−i 2πTnx, f(x) ∼
+∞∑
n=−∞cne
i 2πT
nx
The Fourier coefficients and the formal Fourier series, in trigonometricform, associated with f are defined by
(11) an =2
T
∫ T
0
f(x) cos(2π
Tnx) dx, bn =
2
T
∫ T
0
f(x) sin(2π
Tnx) dx

5
(12) f(x) ∼ a2
++∞∑
n=1
an cos(2π
Tnx) +
+∞∑
n=1
bn sin(2π
Tnx)
REMARK I.2C - a) An equivalent expression of coefficients makes useof integrals from −T/2 to T/2, since the length of the interval is T :
(13) an =2
T
∫ T/2
−T/2
f(x) cos(2π
Tnx) dx, n ∈ N
(14) bn =2
T
∫ T/2
−T/2
f(x) sin(2π
Tnx) dx, n ∈ N
Actually the same numbers are obtained by integrating on any interval[c, c+ T ], with fixed c ∈ R.b) The symbol ∼ reminds that the trigonometric expansion is stillformal: in fact nothing is said about convergence, and, if the series isconvergent, the sum is not necessarily f(x).
c) The constant term in (??), i.e. c ≡ a/2 = 1T
∫ T
0f(x) dx, is the
mean value of f in one period.
3. THEOREMS ON FOURIER SERIES
THEOREM I.3A (Uniformly convergent expansion if the periodic func-tion is regular enough)Let the T−periodic function f admit continuous r−th derivative in[0, T ] with r ≥ 1. Then the Fourier coefficients of the series in expo-nential form satisfy
(15) |cn| ≤ K|n|−r, ∀n ∈ Z − 0,where the constant K is independent of n. Similarly the Fourier coef-ficients an, bn of the series in trigonometric form
(16) |an| ≤ Kn−r, |bn| ≤ Kn−r, ∀n ∈ N
for some K > 0. As a consequence, any periodic function f of class Cr
with r ≥ 2, is the sum of a uniformly convergent Fourier series, bothin exponential form and in trigonometric form.
Proof. - Let f ∈ Cr([0, T ]). The derivative of a periodic function isstill periodic, so integrating by parts r times the expression (?? )
cn =1
T
(
[
f(x)T
−i2πne−i 2π
Tnx
]T
0
−∫ T
0
f ′(x)T
−i2πne−i 2π
Tnx dx
)

6
= +1
T
T
i2πn
∫ T
0
f ′(x)e−i 2πT
nx dx = +1
T
[
T
i2πn
]r ∫ T
0
f (r)(x)e−i 2πT
nx dx.
Therefore
|cn| ≤1
T
[
T
2π|n|
]r ∫ T
0
|f (r)(x)||e−i 2πT
nx| dx
≤ 1
T |n|r[
T
2π
]r ∫ T
0
|f (r)(x)| dx ≤ K
|n|rwhere
K =
[
T
2π
]r
maxx∈[0,T ]
|f (r)(x)|.
Since an = cn + c−n and bn = i(cn − c−n), for the an’s and the bn’s itsuffices to choose K = 2K.Then the uniform convergence is obvious: indeed
|cn||einx| = |cn| ≤K
|n|r , ∀x ∈ R
and
|an cosnx+ bn sinnx| ≤ |an|+ |bn| ≤ 2K
|n|r , ∀x ∈ R
In both cases the general term of the Fourier expansion is bounded bythe general term of a convergent numerical series, that is a gerneralizedharmonic series with exponent r > 1:
|c|+∑
n 6=0
K
|n|r < +∞,|a|2
+∑
n≥1
2K
|n|r < +∞.
DEF. A function f(x) is said piecewise continuous in (a, b) ⊂ R if fis defined and continuous except in a finite number of points xj ∈ (a, b),j = 1, ..., N , where there exist the finite limits:
f(xj + 0) = limx→xj+(x), f(xj − 0) = limx→xj−f(x).
Such type of regularity is part of the Dirichlet condition, which is inthe hypothesis of the convergence criterion:
THEOREM I.3B (Dirichlet’s Criterion) Let the function f(x) be peri-odic (with period T ). Let both f(x) and f ′(x) be piecewise continuous.Then the trigonometric series associated with f is convergent to f(x)in each point where f is continuous; while in each point x where f isdiscontinuous, the series is convergent to the half-sum
f(x + 0) + f(x − 0)
2.

7
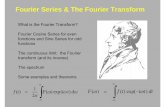
Figure 1. Graph of the Fourier series calculated by thefirst 25 harmonics, i.e. for n from 0 to 12.
EXAMPLE I.3C (Fourier expansion of a periodic step function) - Let
f(x) =
1 x ∈ [2nπ, (2n+ 1)π]0 elsewhere.
]
which satisfies the Dirichlet conditions, with period T = 2π. TheFourier coefficients a, an, bn are directly calculated:
a2
=1
2π
∫ π
−π
f(x) dx =1
2π
∫ π
0
1 dx =1
2.
For n ∈ N,
an =1
π
∫ π
−π
f(x) cos(nx) dx =1
π
∫ π
0
cos(nx) dx =1
π
[
sin(nx)
n
]π
0
= 0,
bn =1
π
∫ π
−π
f(x) sin(nx) dx =1
π
∫ π
0
sin(nx) dx =1
π
[
−cos(nx)
n
]π
0
=
=1
nπ[1− (−1)n] =
0, n even2nπ, n odd .
Thus bn vanishes for even n, it equals 2nπ
for odd n. The Fourier seriesis:
1
2+
∞∑
n=1
[an cos(nx) + bn sin(nx)] =1
2+
∞∑
n=0
2
(2n+ 1)πsin [(2n+ 1)x] .

8
REMARK I.3D - (On the computation of Fourier coefficients)
a) In order to compute the coefficients of the Fourier series, severalremarks are useful.A function f(x) is said to be even if f(−x) = f(x), ∀x; it is odd iff(−x) = −f(x), ∀x. If the function f(x) is even, then all the Fouriercoefficients bn vanish: indeed, under a substitution y = −x,
bn =2
T
∫ T
0
f(x) sin(2π
Tnx) dx =
2
T
∫ T/2
−T/2
f(x) sin(2π
Tnx) dx =
2
T
∫ T/2
−T/2
f(−y) sin(−2π
Tny) dy = − 2
T
∫ T/2
−T/2
f(y) sin(2π
Tny) dy = −bn
Thus 2bn = 0, so that bn = 0. Similarly, it turns out that a =an = 0 if the function is odd. Therefore an even periodic functionadmits a series expansion with only cosine terms; while an odd periodicfunction admits a series expansion with only sine terms. b) The next
remark regards an arbitrary function f(x), defined in some interval, forexample in (0, π). We can extend it both to an even function and toan odd function. Indeed, we can define it in the interval (−π, 0) sothat it becomes even:
f(x) =
f(x), x ∈ (0, π)limx→0+ f(x), x = 0f(−x), x ∈ (−π, 0)
Another choice is to define an odd extension of f(x):
f1(x) =
f(x), x ∈ (0, π)0, x = 0−f(−x), x ∈ (−π, 0)
Finally, one can extend the functions f(x) and f1(x) to the whole ofR, so that the resulting function is periodic with period 2π. Assumingthe Dirichlet conditions to hold, it follows that
(17) f(x) =1
2a +
∞∑
n=1
an cos(nx)
where
an =1
π
∫ π
−π
f(x) cos(nx) dx =2
π
∫ π
0
f(x) cos(nx) dx
and
(18) f1(x) =∞∑
n=1
bn sin(nx)

9
where
bn =1
π
∫ π
−π
f1(x) sin(nx) dx =2
π
∫ π
0
f(x) sin(nx) dx
Indeed f1(x)sin(nx) is even, as a product of two odd functions. Nowunder a restriction of (??), (??) to the interval (0, π), it follows that afunction with domain (0, π) can be expanded in a cosine-series as wellas in a sine-series.
4. APPLICATION OF THE FOURIER SERIES TO
DIFFERENTIAL EQUATIONS
EX. I.4A - The damped harmonic oscillator with a periodic force
Let us compute a particular solution of the damped harmonic oscillatorwith a forcing term
(19) x+ µx+ ω2x = f(t)
when f(t) is a real valued periodic function with period T . Althoughnot real-valued, it is convenient first to consider
f(t) = ρ · eiΩt
where Ω = 2πT
is the pulsation of the forcing term. In this case aparticular solution in the form const. · eiΩt is easily found:
x∗(t) =ρeiΩt
ω2 − Ω2 + iΩµ
As a second step let us consider f(t) given by a finite Fourier expansionin exponential form:
f(t) =N∑
n=−N
cneiΩnt
where cn = c−n since f(t) is real valued. A particular solution withperiod T is given by
x∗(t) =N∑
n=−N
x∗n(t), x∗
n(t) =cne
iΩnt
ω2 − n2Ω2 + inΩµ
Notice that x∗ is real since the addends of the sum with opposite indicesn, −n are complex conjugate. Moreover x∗
n(t) is a particular solutionof the differential equation
x+ µx+ ω2x = cneiΩnt.

10
Thus we can immediately verify:
x∗ + µx∗ + ω2x∗ =N∑
n=−N
(x∗n + µx∗
n + ω2x∗n) =
N∑
n=−N
cneiΩnt = f(t).
Finally, let f(t) admit a Fourier expansion with infinitely many nonzerocoefficients:
f(t) =∞∑
n=−∞cne
iΩnt
A particular solution is looked for in the form:
(20) x∗(t) =∞∑
n=−∞
cnω2 − n2Ω2 + inΩµ
eiΩnt
To this end we have to check the convergence of (??); then, providedits convergence, to check whether is it a solution of the differentialequation. Now a sufficient condition to derive k times term by termis the convergence of the series of the k−th order derivatives:
(21)∞∑
n=−∞
cn(iΩn)k
ω2 − n2Ω2 + inΩµeiΩnt
uniformly with respect to t. On the other hand we know that f ∈ Cr
implies the bound on the Fourier coefficients |cn| ≤ cn−r. Thereforethe general term of ??) is bounded by
cΩk nk
nr√
(ω2 − n2Ω2)2 + n2µ2Ω2≤ Cnk−r−2
for some constant C > 0 independent of n. So the series (??) is uni-formly convergent with respect to t if
r + 2− k > 1;
In particular, the series (??) is a solution of the differential equation ifr + 2− 2 > 1 (k = 2), i.e. if the function f(t) is at least in C2.
Notice: for µ small enough, the particular solution x∗(t) amplifies theharmonics n = ±[ω/Ω], (where [·] denotes the integral part), of thefunction f(t) for which ω2−n2Ω2 attains its minimum, while the otherharmonics are damped.
EXAMPLE I.4B Let us consider the one-dimensional heat equationwith boundary and initial conditions:(22)
∂u∂t
= 2∂2u∂x2
u(0, t) = u(3, t) = 0, ∀t ≥ 0u(x, 0) = 5 sin(4πx)− 3 sin(8πx) + 2 sin(10πx), x ∈ [0, 3].
Besides, the solution is required to remain bounded ∀(x, t) ∈ [0, 3]×R+.

11
Let us solve the equation by separation of variables. By such a method,we look for a solution (if possible) of the form
u(x, t) = f(x)g(t)
. Then the equation reads f(x)g(t) = 2f ′′(x)g(t). After separatingvariables,
2 · f′′(x)
f(x)=
g(t)
g(t).
Since the left hand side depends only on x, the right hand side dependsonly on t, and the equation holds for all (x, t) where x, t are independentvariables,
∃λ ∈ R : 2f ′′(x)
f(x)= 2λ =
g(t)
g(t).
Therefore we obtain two ordinary differential equations depending onan arbitrary parameter λ:
f ′′ = λf, g = 2λg
with general solution
(23) f(x) = c1e√λx + c2e
−√λx, g(t) = ce2λt if λ 6= 0
f(x) = c1x+ c2, g(t) = c if λ = 0.
Now, the boundedness requirement ∀t ∈+ implies λ < 0. Therefore,setting λ = −ω2, by Euler’s formulae the general solution (??) can bewritten:
f(x) = a cos(ωx) + b sin(ωx), g(t) = ce−2ω2t.
Hence a solution of the heat equation turns out to be
u(x, t) = f(x)g(t) = ce−2ω2t[a cos(ωx) + b sin(ωx)] =
= e−2ω2t[A cos(ωx) + B sin(ωx)]
with constants A,B, ω to be determined by using the boundary condi-tions in (??):
u(0, t) = 0 =⇒ A = 0, i.e. u(x, t) = e−2ω2tB sin(ωx)
u(3, t) = 0 =⇒ B sin(3ω) = 0
This last equality, in turn, implies
either B = 0, arbitrary ω, or arbitrary B,ω = nπ/3, n ∈ .
Now B = 0 is immediately rejected since it gives an identically vanish-ing solution. Therefore a nontrivial solution of the diffusion equationin (??) with zero boundary condition has the form:
(24) u(x, t) = Be−2n2π2t/9 sin(nπ
3x), n ∈

12
Figure 2. Graph of the function u(x, t) for some values oft: t = 0 (continuous line), t = 0.001 and t = 0.01
By the superposition principle (which holds for linear differential equa-tions), a linear combination of solutions is still a solution of the homo-geneous equation; so for any choice of n1, n2, n3 ∈ the function
B1e−2n2
1π2t/9 sin(
n1π
3x)+B2e
−2n22π2t/9 sin(
n2π
3x)+B3e
−2n23π2t/9 sin(
n3π
3x)
is still a solution of the equation in (??). By comparing this type ofsolution with the initial condition in (??) we find:
B1 = 5, n1π/3 = 4π, B2 = −3, n2π/3 = 8π, B3 = 2, n3π/3 = 10π
i.e. n1 = 12, n2 = 24, n3 = 30. Thus the unique (bounded) solutionof the diffusion problem (??) is
u(x, t) = 5e−32π2t sin(4πx)− 3e−128π2t sin(8πx) + 2e−200π2t sin(10πx)
EXAMPLE I.4C - We solve the same diffusion equation with a differentinitial value function:
∂u∂t
= 2∂2u∂x2
u(0, t) = u(3, t) = 0, ∀t ≥ 0u(x, 0) = 25x(3− x), x ∈ [0, 3]
Again by separation of variables we obtain a solution of the heat equa-tion, but it is no more sufficient to make a finite superposition of suchfunctions to solve the problem. We try by a superposition of infinitelymany functions:
u(x, t) =∞∑
n=1
Bne−2n2π2t/9 sin(n
π
3x),

13
Figure 3. Graph of the function u(x, t), for (x, t) ∈ (0, 3)× (0, 0.01)
where we require u(x, 0) = 25x(3− x), that is
25x(3− x) =∞∑
n=1
Bn sin(nπ
3x), x ∈ (0, 3).
This amounts to expand in a sine Fourier series the function 25x(3−x).According to Remark I.3D, this is possible if we regard the functionas a restriction of an odd periodic function defined for all x ∈, withperiod 6:
f1(x) =
25x(3− x), x ∈ (0, 3)25x(3 + x), x ∈ (−3, 0)... and so on.
Then we have the usual Fourier coefficients for an odd function ofperiod T :
Bn =2
T
∫ T/2
−T/2
f1(x) sin(n2π
Tx) dx =
4
T
∫ T/2
0
f1(x) sin(n2π
Tx) dx =
=2
3
∫ 3
0
25x(3− x) sin(nπx/3) dx =900
n3π3[1− (−1)n]
Finally
u(x, t) =1800
π3
∞∑
m=0
(2m+ 1)−3e−2(2m+1)2π2t/9 sin((2m+ 1)πx/3).
The graph of u(x, t) is first represented for some values of t (Fig. 4),then for (x, t) ∈ (0, 3)× (0, 1) (Fig. 5).

14
Figure 4. For initial shape u(x, 0) = 25x(3− x), graph ofthe solution u(x, t) when t = 0, t = 0.01, t = 0.1
Figure 5. For initial shape u(x, 0) = 25x(3− x), graph ofthe solution u(x, t), (x, t) ∈ (0, 3)× (0, 1)
5. FOURIER TRANSFORM
DEFINITION I.5A (Direct Fourier transform) Let f = f(t) be a realvalued (or a complex valued) function of a real variable. The Fouriertransform of f is the function:
(25) F (f) = f(ω) =
∫ +∞
−∞f(t)e−iωtdt, ω ∈ R

15
whenever such an integral exists ∀ω ∈ R.The operator F , which transforms f(t) into f(ω), is said ”Fouriertransform”.
PROPOSITIONS I.5BLet f(t) be an absolutely integrable function in R, that is:
(26)
∫ +∞
−∞|f(t)|dt < +∞
Theni) the Fourier transform f(ω), for ω ∈ R, exists;
ii) the modulus of f(ω) is an even function if f is real valued;
iii) limω→±∞ f(ω) = 0 (Riemann’s lemma);
iv) f is a continuous function ∀ω ∈ R.Let f(t), f ′(t) be piecewise continuous in any bounded interval, thenv) the inversion formula
(27) f(t) =1
2πPV
∫ +∞
−∞f(ω)eiωtdω ≡ 1
2πlim
R→+∞
∫ +R
−R
f(ω)eiωtdω
holds in all points t where f(t) is continuous, while the formula
(28)1
2[f(t + 0) + f(t − 0)] =
1
2πPV
∫ +∞
−∞f(ω)eiωtdω
holds in all discontinuity points t.
Remarks.(i) Since ω and t are real, |eiωt| = 1, and
|∫ +∞
−∞f(t)e−iωtdt| ≤
∫ +∞
−∞|f(t)|dt < +∞
so the existence of f is immediate if f is absolutely integrable. (ii) If
f = f (real valued function), the complex conjugate of f(ω) is equalto the Fourier transform of f calculated in −ω:
¯f(ω) = (
∫ +∞
−∞f(t)e−iωtdt)¯=
∫ +∞
−∞f(t)eiωtdt = f(−ω).
Now writing f(ω) in exponential notation
f(ω) = A(ω)eiφ(ω)
we notice that A(ω)e−iφ(ω) = A(−ω)eiφ(−ω), so that A(ω) = A(−ω).
The proof of (iii)-(v) is omitted. Only remark that the integral in(??) is computed as a Cauchy principal value. The Cauchy Principal
Value integral is convergent if the limit limR→+∞∫ +R
−R(...) exists and is

16
finite. Recall that the usual generalized integral of a function g(t) isconvergent if the double limit
limR,S→+∞
∫ R
−S
g(t) dt
exists and is finite with R, S diverging to +∞ independently of eachother. Of course if the integral is convergent in the generalized sense,then it is convergent in the sense of the Cauchy principal value. Butthe opposite implication is not true in general. An example is thefunction g(t) = t, which is integrable in the Cauchy principal valuesense:
P
∫ +∞
−∞t dt = lim
R→+∞
∫ +R
−R
t dt = 0.
The same function is not integrable in the generalized sense, since manydifferent values are attained by the double limit prescription: for exam-
ple∫ R
−2Rtdt → −∞, while
∫ 2R
−Rtdt → +∞. A similar situation regards
any odd, piecewise continuous function.Finally, in some textbooks the direct ad the inverse Fourier transformsare defined in a slightly different way, attributing to both the samecoefficient 1/
√2π (instead of 1 and 1/2π, respectively). Actually any
other choice is good, provided that the product of the two coefficientsis 1/2π.
PROPOSITION I.5C Symmetry property -
If f is the Fourier transform of f , and if both satisfy the inversionconditions I.5B, (v), then
(29) F [f ](ω) = 2πf(−ω)
ProofSince the inversion formula ensures 1
2π
∫ +∞−∞ f(t)eiωtdt = f(ω), then
F (f) =
∫ +∞
−∞f(t)e−iωtdt = 2π
1
2π
∫ +∞
−∞f(t)e−iωtdt = 2πf(−ω).
PROPOSITION I.5D (Computation of Fourier transforms)
(30) 1) If pa(t) =
1, t ∈ [−a, a]0, |t| > a
then pa(ω) = 2sinωa
ω
(31) 2) If f(t) =sin(ωt)
tthen f(ω) =
π, |ω| < ωπ/2, ω = ±ω0, |ω| > ω
(32) 3) If f(t) = e−αt2 then f(ω) =
√
π
αe−
ω2
4α .

17
Proof1) Let pa(t) = I[−a,a](t), for each a > 0. The Fourier transform (??)is nothing else than
pa(ω) =
∫ a
−a
e−iωtdt =
[
e−iωt
−iω
]a
−a
=1
iω(eiωa − e−iωa) = 2
sinωa
ω
for ω 6= 0, while pa(0) = 2a. Fig. 6 and Fig. 7 show pa(t) and p(ω),respectively.
2) Now consider
f(t) =sin(a t)
t.
By using (30), the given function f(t) can be seen as a Fourier trans-form:
f(t) =sin(a t)
t=
1
2pa (t),
where pa is the indicator function of [−a, a]. By applying the Fouriertransform to both sides and using the symmetry property I.5C,
f(ω) ≡ 1
2F [pa](ω) = 2π
1
2pa(−ω) = π · pa(−ω)
in all points where pa is continuous. The half-sum rule (??) holds inthe discontinuity points, so the explicit result is:
(33) f(ω) =
π, |ω| < aπ/2, ω = ±a0, |ω| > a
3) Finally consider the Gauss integral and the Fourier transform ofthe Gaussian function.a) Let I =
∫ +∞−∞ e−αx2
dx. By Fubini’s theorem
I2 =
[∫ +∞
−∞e−αx2
dx
]2
=
∫ +∞
−∞e−αx2
dx
∫ +∞
−∞e−αy2dy
=
∫ +∞
−∞
∫ +∞
−∞e−α(x2+y2)dxdy
Under a change of variables from cartesian to polar coordinates,
x = r cos θ
y = r sin θ, dxdy → rdrdθ
the integral becomes
I2 =
∫ 2π
0
∫ +∞
0
e−αr2rdrdθ = 2π[e−αr2/(−2α)]+∞0 =
π
α.
So I =√
π/α.

18
Figure 6. Graph of pa(t).
b)
F [e−αt2 ] =
∫
R
e−iωte−αt2dt =
∫
R
e−(
√αt+ iω
2√α)2 · e−ω2
4α dt
Now by Cauchy’s theorem of complex analysis, the integral performedon the line R + iω
2√α(parallel to the real line in the complex plane) is
equal to the integral performed on the real line, which is√
πα:
=
∫
R
e−(√αt)2 · e−ω2
4α dt =
√
π
αe−
ω2
4α .
Therefore, up to a coefficient, the Fourier transform of a Gauss functionis still a Gauss function, with α replaced by −1/(4α).
6. PROPERTIES OF THE FOURIER TRANSFORM
THEOREM I.6A (Linearity ) Let the functions f1, f2 admit Fourier
transform F (f1) = f1 and F (f2) = f2, respectively. Then for arbitrarycoefficients c1, c2 ∈ there exists the Fourier transform of c1f1(t)+c2f2(t)and
F (c1f1 + c2f2) = c1f1 + c2f2.
Proof. A straightforward consequence of the linearity property of theintegral. F and F−1 are linear operators, too. .

19
Figure 7. Graph of pa(ω).
THEOREM I.6B (Frequency shifting) Let the function f(t) admit
Fourier transform f(ω). For any constant ω ∈,
F [eiωtf(t)] = f(ω − ω).
Proof.
F [eiωtf ] =
∫ +∞
−∞f(t)e−i(ω−ω)tdt = f(ω − ω)
EX. I.6C (Fourier transform of a truncated cosine function)Is it possible to transform, in a generalized sense, the cosine (sine)function, which does not admit the integral transform I.5A in the strictsense? An approximation to the right answer (I.8H iv) is clear if weconsider a truncated cosine, supported in intervals (−a, a) for arbitrar-ily large a > 0 :
f(t) = pa(t) · cos(ωt), pa(t) = I(−a,a)(t)
where pa(t) is the indicator of (−a, a) and ω is nonzero and fixed. ByEuler’s formula, linearity, frequency shifting and by the above examplesI.5D,
f(ω) = F [pa(t) cos(ωt)] =1
2
[
F (pa(t)eiωt) + F (pa(t)e
−iωt)]
=1
2[pa(ω − ω) + pa(ω + ω)]
=sin[a(ω − ω)]
ω − ω+
sin[a(ω + ω)]
ω + ω.

20
Figure 8. Graph of the Fourier transform of the modulatedindicator function pa(t) cos(ωt), with ω = 7, a = 5.
As a → +∞, Fig. 8 shows that the Fourier transform appears moreand more concentrated on the frequency ω (and, of course, −ω sincethis Fourier transform is an even function).
Let us prove that the Fourier operator transforms derivatives in thetime representation into multiplication by corresponding monomialsin the frequency representation, and vice-versa. By this property theFourier is a powerful tool for differential equations.
THEOREM I.6D (Transformation of derivatives into multiplicationsand vice-versa )Let f ∈ Cn() and let f (r)(t) be absolutely integrable on for each r ≤ n.Then
F [f (n)] = (iω)nf(ω).
Similarly, assuming that tnf(t) is absolutely integrable,
F [(−it)nf(t)] =dnf(ω)
dωn.
Proof. The proof is based on integration by parts and the fact that
(34) limt→±∞
f (r)(t) = 0, r = 0, 1, ..., n− 1
since f (r)(t), r = 0, 1, . . . , n is absolutely integrable on . We can realizethis fact by writing
f (r)(t) = f (r)(0) +
∫ t
0
f (r+1)(τ)dτ.

21
Since f (r+1)(τ) is absolutely integrable, then the following limit existsand is finite:
L = limt→+∞
f (r)(t) = f (r)(0) +
∫ +∞
0
f (r+1)(τ)dτ.
Now, either L = 0 or L 6= 0 : we prove that the second case is impossi-ble. Ab absurdo, let L 6= 0. Then there is an interval [T,+∞) in which|f (r)(t)| > L/2, so that f (r)(t) cannot be absolutely integrable. Thus(??) is proved. Consider
F (f (n))(ω) =
∫ +∞
−∞f (n)(t)e−iωtdt
=[
f (n−1)(t)e−iωt]+∞−∞ + iω
∫ +∞
−∞f (n−1)(t)e−iωtdt
= iω F (f (n−1))(ω)
since limt→±∞ f (n−1)(t) = 0. By iterating such relation the statementfollows. Finally, by direct inspection the trasform of (−it)f(t) is equal
to df(ω)/dω, and the iteration on n concludes the proof.
7. CONVOLUTION PRODUCT
DEFINITION I.7A -(Convolution product) The convolution productof two functions f1(t), f2(t) defined for t ∈, is the generalized integral(provided it exists)
(35) (f1 ∗ f2)(t) =∫ +∞
−∞f1(x)f2(t− x)dx.
REMARK I.7B - For the convolution product the usual associativeand distributive (with respect to sum) properties hold. Moreover, thecommutative property can be easily proved: by a change of variablet− x = y,
f1 ∗f2(t) =∫ +∞
−∞f1(x)f2(t−x)dx =
∫ +∞
−∞f1(t−y)f2(y)dy = f2 ∗f1(t).
THM. I.7C - (Convolution theorem in time domain, convolution theo-rem in frequency domain)If the functions f1, f2 are sufficiently regular 1 then
(36) F (f1 ∗ f2)(ω) = f1(ω) · f2(ω)1A generic assumption of regularity so as to ensure the existence of the Fourier
transforms, the change in the order of integration, etc.

22
(37) F−1(f1 ∗ f2)(t) = (f1 ∗ f2)(t).Scheme of proof.Let us consider the Fourier transform of a convolution product:
F (f1 ∗ f2)(ω) =∫ +∞
−∞e−iωtdt
∫ +∞
−∞f1(x)f2(t− x)dx
=
∫ +∞
−∞
∫ +∞
−∞e−iωtf1(x)f2(t− x)dt dx
By the change of variables (t, x) → (y, x), where x = x and y = t− x,we obtain
F (f1 ∗ f2)(ω) =∫ +∞
−∞
∫ +∞
−∞e−iω(x+y)f1(x)f2(y)dy dx
=
∫ +∞
−∞e−iωxf1(x) dx
∫ +∞
−∞e−iωyf2(y) dy = f1(ω) · f2(ω)
and vice-versa
F−1(
f1 · f2)
(t) = (f1 ∗ f2) (t)
EXAMPLE I.7D - (The diffusion equation on a line) Consider the
heat equation with initial condidion f(x) for ∈:
∂u∂t
= k ∂2u∂x2
u(x, 0) = f(x), −∞ < x < +∞|u(x, t)| < M, −∞ < x < +∞, t > 0
In this problem it is useful to consider the Fourier transform of bothsides with respect to x, so that the second order derivative (with respectto x) is transformed into a multiplication by the square of the conjugatevariable (Thm. I.6F). Denoting p the Fourier variable conjugate withx, we obtain:
dF [u]
dt= −kp2 · F [u]
where the Fourier transform of u is denoted by F [u]. Here we deal witha first order ordinary differential equation, since the unknown functionF [u] no more depends on x. The general solution of such ordinaryequation is:
(38) F [u(x, t)] = Ce−kp2t
Setting t = 0 in (??) we see that
F [u(x, 0)] = F [f(x)] = C
so that
F [u] = f(p) · e−kp2t.

23
Now we can apply the convolution theorem (Thm. 7.1):
u(x, t) = f(x) ∗(
F−1[e−kp2t])
From (??) we know that
F [e−αx2
] =
√
π
αe−p2/4α, or F−1[e−p2/(4α)] =
√
α
πe−αx2
With α = 1/4kt, it implies
F−1[e−kp2t] =
√
1
4kπte−x2/4kt.
Then the solution is the convolution product
u(x, t) = f(x) ∗(
1√4πkt
e−x2/4kt
)
=
∫ +∞
−∞f(z)
1√4πkt
e−(x−z)2/4ktdz.
Notice that in this formula the well known ”heat kernel” appears:
G(z; t) =1√4πkt
e−z2/4kt
which coincides with a Gaussian probability density with mean zeroand variance 2kt. So we have three facts: a) the diffusion equation onthe line with initial condition u(x, 0) = f(x) is solvable with a knownexplicit kernel:
u(x, t) =
∫ +∞
−∞f(z)G(x− z; t)dz.
b) The physical interpretation of u(x, t) as the temperature at time tsuggests that a choice of a compact support initial temperature f(x)gives rise to a temperature which is at once everywhere nonzero (!):u(x, t) 6= 0 ∀x ∈, ∀t > 0. An instantaneous diffusion to all points ofspace takes place. Setting σ2 = 2kt, the convolution of any functionf(x) with the probability density 1
σ√2πe−z2/2σ2
is convergent to f asσ → 0.

24
Figure 9. Graph of the solution of the heat equation, start-ing from an initial function u(x, 0) with compact support,the indicator of (0, 10). Its diffusion is represented at timest = 0.01, t = 1, t = 10.
Figure 10. Graph of the solution of the heat equation,starting from an initial function u(x, 0) with compact sup-port, the indicator of (0, 10). Evidence of its ”diffusion” isgiven at times t = 0.01, t = 1, t = 10.
8. TEST FUNCTIONS AND DIRAC’S DELTA
Let ϕ be a function of one real variable. We recall that the supportof a function is the closure of the set where the function is nonzero:

25
supp(ϕ) = x ∈ R : ϕ(x) 6= 0. Also, we recall that a compact subsetof R is a closed and bounded set.A test function is an infinitely differentiable function with compactsupport in R. The set of test functions is denoted C∞
(R).
REMARK I.8A - Such functions do exist: an example is
ϕ(x) =
exp(−1/(1− |x|2), |x| < 10, |x| ≥ 1.
Although the derivatives of 1/(1 − |x|2) are divergent as x → 1− (asx− → −1+) , we see that all derivatives of ϕ exist and are zero in 1− (in−1+) because they contain the exponentially small factor exp(−1/(1−|x|2). So ϕ ∈ C∞
(R) and supp(ϕ) = x ∈ Rn : |x| ≤ 1 = B1(0),i.e. the support is the unitary ball centered at the origin. Similar testfunctions can be written with support coinciding with a given arbitrarycompact set of R.
DEF. I.8B - (The space of test functions) In the set C∞ (R), of infinitely
differentiable functions with compact support, a sequence ϕn is saidto converge to ϕ ∈ C∞
if(i) there is a compact set K such that supp(ϕn) ⊂ K, ∀n ∈ N
(ii) the sequence ϕ(k)n n∈N of the k−th order derivatives is uniformly
convergent to ϕ(k) as n → ∞, for k = 0, 1, 2... The vector space C∞ (R),
when endowed with such notion of convergence, is said ”the space oftest functions”’ and is denoted by D(R).
Notice that the space D(R) is not normalizable, i.e. it is impossible tointroduce a norm compatible with the above type of convergence.
DEF. I.8C - (The space of distributions) Let D(R) be the space of testfunctions on R. A map T : D(R) → R is said a linear functional if
< T, (λ1ϕ1 + λ2ϕ2) > = λ1 < T, ϕ1 > +λ2 < T, ϕ2 > .
T is continuous if
ϕn → ϕ in D(R), =⇒ < T, ϕn >→< T, ϕ > in R.
The space D∗(R) of linear and continuous functionals on D(R) is saidthe ”space of distributions” and each element T ∈ D∗(R) is said a”distribution”.
D∗(R) is endowed with a topology by means of the notion of weakconvergence:

26
EXAMPLE I.8D - (Regular distributions). Let f be a ”locally inte-grable”’ real function on R:
f ∈ L1loc(R), i.e. ∃
∫
K
|f(x)| dx < +∞, ∀ compact K ⊂ R.
The map Tf : D(R) → R is defined by
< Tf , ϕ >=
∫
Ω
f · ϕ dx, ϕ ∈ D(R).
Such a map is well defined since ϕ has compact support in R. MoreoverTf is linear and continuous: indeed, if ϕn → ϕ in D(R), there exists acompactK ⊂ R such that all ϕn vanish out ofK. Since the convergenceis uniform in K,
| < Tf , ϕn > − < Tf , ϕ > | = |∫
R
(fϕn − fϕ)dx| ≤ ǫ
∫
K
|f |dx
if only n is larger than some nǫ. Therefore < Tf , ϕn >→< Tf , ϕ >, i.e.Tf is continuous. Therefore Tf is a distribution, Tf ∈ D∗(R). Distri-butions of this kind are said ”regular”. All the remaining distributions,which do not admit a representation by means of L1
loc functions, aresaid ”singular”.
DEFINITION I.8E - Dirac’s delta - Let a ∈ R. Dirac’s delta, in thepoint a, is the linear functional by which the value of ϕ in a is associatedto any test function ϕ ∈ D(R):
< δa, ϕ >:= ϕ(a).
REMARK I.8F - Such a linear functional on D(R) is a distribution inthe sense of Def. I.8C. Indeed it is continuous: if ϕn → ϕ in D(R), afortiori the point convergence holds, so that
< δa, ϕn >≡ ϕn(a) → ϕ(a) ≡< δa, ϕ > as n → ∞In case a = 0, it is simply said ”Dirac’s delta”:
< δ, ϕ >= ϕ(0), ∀ϕ ∈ D(R)
. It is a ”singular” distribution in the sense that there exists no functionf ∈ L1
loc(R) such that < δ, ϕ >=∫
Rf(x)ϕ(x). Nevertheless it is usual
to write δ(x) , just as if it were a function, in a conventional notation:∫ ∞
−∞δ(x)ϕ(x)dx = ϕ(0),
∫ ∞
−∞δ(x− a)ϕ(x)dx = ϕ(a).
This notation is currently accepted, but in the sense of definitions I.8C,I.8E. Such a notation can be understood by approximants, too:
THM. I.8G - Sequence of approximants of Dirac’s delta -

27
Let fn be a sequence of probability densities, i.e. fn ∈ L1loc, with fn ≥ 0,
and∫
Rfn(x)dx = 1, ∀n ∈ N . Let, moreover, fn(x) → 0 ∀x 6= 0. Then
limn→+∞
∫
R
fn(x)ϕ(x)dx = ϕ(0), as n → ∞.
The same is true for other sequences, such as:
fn = ie−inx
πx.Proof. For the proof we restrict to a simple example of approximants:
fn(x) =n
2I[−1/n,1/n](x) =
n2, x ∈ [− 1
n, 1n]
0, elsewhere.
Indeed
min[− 1
n,+ 1
n]ϕ(x) = mn ≤ n
2
∫ + 1
n
− 1
n
ϕ(x)dx ≤ Mn = max[− 1
n,+ 1
n]ϕ(x)
where, by continuity in 0,
limn→∞
mn = ϕ(0), limn→+∞
Mn = ϕ(0),
whence the formula.
In the proper sense (I.5A) we know that the Fourier transform of func-tions such as constants or cosine functions do not exist. But suchtransforms can make sense in the wider framework of distributions. Tothis end the formal use of usual properties (linearity, frequency shifting,etc. ) gives the right results:
EXAMPLES I.8H -
i) F [δ] ≡∫
R
e−iωtδ(t)dt = 1, F−1[1] = δ.
ii)
∫
R
e−iωtdt ≡ F [1] = 2πδ(ω), F−1[2πδ(ω)] = 1.
iii)F [eiωt] =
∫
R
e−i(ω−ω)tdt ≡ F [1](ω − ω) = 2πδ(ω − ω)
iv)F [cos(ωt)] =1
2F (eiωt) +
1
2F (e−iωt)
= π[δ(ω − ω) + δ(ω + ω)].
(Compare (iv) with the Fourier transform of the truncated cosine func-tion
F [pa(t) cos(ωt)] =sin[a(ω − ω)]
ω − ω+
sin[a(ω + ω)]
ω + ω,
which tends to zero, as a → ∞, ∀ω 6= ±ω).

28
In order to understand how to generate a derivative of a distribution,let us consider the simple case of a differentiable function f , at leastwith continuous derivative in an open connected set R. We considerthe distribution Tf ′ associated with f ′(x). For any ϕ ∈ D(R), takea, b such that supp(ϕ) ⊂ [a, b] ⊂ R; integrating by parts we obtain:
< Tf ′ , ϕ >=
∫
R
f ′(x)ϕ(x) dx = [f(x)ϕ(x)]ba −∫ b
a
f(x)ϕ′(x) dx
Taking into account that ϕ′ ∈ D(R), it follows that
< Tf ′ , ϕ > = − < f, ϕ′ >
is the distribution which is determined by f ′.
DEFINITION I.8I - The derivative of a distribution. -Let r = 1, 2, 3, .... The linear map from D∗(R) to D∗(R) defined by
T → DrT, with < DrT, ϕ,>= (−1)r < T,Drϕ >
is said r−th derivative, and DrT is the r-th order derivative of thedistribution T.
EXAMPLE I.8L- The derivatives of the Heaviside function, of δ andδ′. -Let us consider the Heaviside function
H(x) =
1, x > 00, elsewhere.
]
The corrspoinding distribution
< Tf , ϕ >=
∫ ∞
0
ϕ(x) dx
has the derivative:
< DTf , ϕ >= − < Tf , ϕ′ >= −
∫ ∞
0
ϕ′(x) dx = ϕ(0) =< δ, ϕ >
Therefore the derivative of the Heaviside function is the Dirac’s deltadistribution.
The derivative of δ is given by:
< Dδ, ϕ >= − < δ, ϕ′ >= −ϕ′(0).
The second derivative of delta is:
< D2δ, ϕ >= (−1)2 < δ, ϕ′′ >= ϕ′′(0).
and so on.
EX. I.8M - Let f : R → R be continuous except in the pointsa1 < a2 < ... < an. For sake of simplicity, fix ideas with n = 2. Letf admit a continuous derivative in the intervals (−∞, a1), (a1, a2),

29
(a2,+∞). Let, moreover, exists the finite limits f(a−1 ), f(a+1 ), f(a−2 ),
f(a+2 ). f is locally integrable, so the distribution Tf makes sense:
< Tf , ϕ >=
∫
R
f(x)ϕ(x) dx =s∑
k=0
∫ ak+1
ak
f(x)ϕ(x) dx
The derivative is:
< DTf , ϕ >= − < Tf , ϕ′ >= −
∫ a1
−∞fϕ′ −
∫ a2
a1
fϕ′ −∫ ∞
a2
fϕ′
= −[fϕ]a1−∞ +
∫ a1
−∞ϕf ′ − [fϕ]a2a1 +
∫ a2
a1
ϕf ′ − [fϕ]+∞a2
+
∫ +∞
a2
ϕf ′ =
∫
R−a1,a2ϕf ′dx+ ϕ(a1)[f(a
+1 )− f(a−1 )] + ϕ(a2)[f(a
+2 )− f(a−2 )].
Therefore
d
dxTf = Tf ′ +
n∑
k=1
[f(a+k )− f(a−k )]δak .
In probability, for example, this means that the derivative of a discretedistribution function F (x) is a ”probability density” in the distribu-tional sense:
d
dxF (x) = F ′(x) · IR−a1,...,an +
n∑
k=1
P (X = ak) · δ(x− ak).

30
f(t) f(ω)
c1f1(t) + c2f2(t) c1f1(ω) + c2f2(ω)
f ′(t) iωf(ω)
f (n)(t) (iω)nf(ω)
tnf(t) in dnf(ω)dωn
f(t− t) e−iωt f(ω)
eiωtf(t) f(ω − ω)
(f1 ∗ f2)(t) f1(ω) · f2(ω)f1 · f2 1
2π(f1 ∗ f2)(ω)
pa(t) = I(−a,a)(t) 2 sin(aω)/ω
sin(ωt)/t f(ω) = π · I(−ω,ω)(ω)
e−αt2√
παe−ω2/(4α)
pa(t) cos(ωt)sin[a(ω−ω)]
ω−ω+ sin[a(ω+ω)]
ω+ω
δ(t) 1
1 2πδ(ω)
δ(t− a) e−iωa
eiωt 2πδ(ω − ω)
e−iωt 2πδ(ω + ω)
cos(ωt) π[δ(ω − ω) + δ(ω + ω)]
H(t) = I(0,∞)(t) πδ(t) + 1/(iω)