EECS 473 Advanced Embedded Systems Lecture 10: Batteries and linear converters.
Upload
janice-robinsonCategory
view
215download
3
Hybrid Systems and Networked Control Systems
Michael S. Branicky
EECS Dept.
Case Western Reserve University
NSF Planning Meeting on
Cyber-Physical Systems
27 July 2006

Networked ControlHardware
Diagnostics+Monitoring
Software Engineering
Security

Hybrid Dynamical System*• A set of dynamical
systems plus rules for jumping among them
[Raibert’s Hopper]
___________________* M.S. Branicky. Introduction to hybrid systems. In Handbook of Networked and Embedded Control Systems, Birkhauser, 2005.

Hybrid Dynamical System: Automata Viewpoint*
[Thermostat]
[Raibert’s Hopper]
[Bouncing Ball]
___________________* M.S. Branicky. Introduction to hybrid systems. In Handbook of Networked and Embedded Control Systems, Birkhauser, 2005.

Adding Control: CHDS*
[Tiptronic Transmission]
• An HDS plus controlled switching and jumps
___________________* M.S. Branicky. Introduction to hybrid systems. In Handbook of Networked and Embedded Control Systems, Birkhauser, 2005.

Networked Control Systems* (1)
• Numerous distributed agents• Physical and informational dependencies
___________________* M.S. Branicky, V. Liberatore, and S.M. Phillips. Networked control system co-simulation for co-design. Proc. ACC, 2003.

Networked Control Systems* (2)
• Control loops closed over heterogeneous networks
___________________* M.S. Branicky, V. Liberatore, and S.M. Phillips. Networked control system co-simulation for co-design. Proc. ACC, 2003.

Mathematical Model:NCS Architecture*
An NCS Architecture is a 3-tuple: • Agent Dynamics: a set of stochastic hybrid systems
dXi(t)/dt = fi (Qi(t), Xi(t), QI[t], YI[t], R(t)) Yi(t) = gi (Qi(t), Xi(t), QI[t], YI[t], R(t))
• Network Information Flows: a directed graph GI = (V, EI), V = {1, 2, …, N}; e.g., e = (i, j)
• Network Topology: a colored, directed multigraph GN = (V, C, EN), V = {1, 2, …, N}; e.g., e = (c, i, j)
___________________* M.S. Branicky, V. Liberatore, and S.M. Phillips. Networked control system co-simulation for co-design. Proc. ACC, 2003.

Fundamental Issues*• Time-Varying Transmission Period• Network Schedulability, Routing Protocols• Network-Induced Delays• Packet Loss
Plant
Controller
h(t)
Plant
Controller
h
DelayDelay
Plant
Controller
r
Plant
Plant
Controller
Controller
.
.
.N
etw
ork
h1(t)
hN(t)
___________________* M.S. Branicky, S.M. Phillips, W. Zhang (various): Proc. ACC, 2000; IEEE Cont. Systs. Mag., 2001; Proc. CDC, 2002.

Previous Work• Nilsson: Time-Stamp Packets, Gain Schedule on Delay• Walsh et al.: no delay+Max. Allowable Transfer Interval• Zhang, Branicky, Phillips: hsuff
• Hassibi, Boyd: Asynchronous dynamics systems• Elia, Mitter, others: Info theory: BW reqts. for CL stability• Teel/Nesic: Small gain theorem, composability

Control and Scheduling Co-Design*
• Control-theoretic characterization of stability and performance (bounds on transmission rate)
• Transmission scheduling satisfying network bandwidth constraints
Simultaneous optimization ofboth of these = Co-Design
Plant
Plant
Controller
Controller
.
.
.
Net
wor
k
h1(t)
hN(t)
___________________* M.S. Branicky, S.M. Phillips and W. Zhang. Scheduling and feedback co-design for networked control systems. Proc. CDC, 2002.

Co-Simulation*
Simulation languages
Bandwidthmonitoring
VisualizationNetwork dynamics
Plant output dynamics
Packet queueing and forwarding
Co-simulation of systems and networks
Plant agent(actuator, sensor, …)
Router
Controlleragent(SBC, PLC, …)
___________________* M.S. Branicky, V. Liberatore, and S.M. Phillips. Networked control system co-simulation for co-design. Proc. ACC, 2003.

Co-Simulation Methodology*
• Simultaneously simulate both the dynamics of the control system and the network activity
• Vary parameters:– Number of plants, controllers, sensors– Sample scheduling– Network topology, routing algorithms– Cross-traffic– Etc.
___________________* M.S. Branicky, V. Liberatore, and S.M. Phillips. Networked control system co-simulation for co-design. Proc. ACC, 2003.

Co-Simulation Components (1):Network Topology, Parameters*
Capability like ns-2 to simulate network at packet level: • state-of-art, open-source software• follows packets over links• queuing and de-queuing at router buffers• GUI depicts packet flows• can capture delays, drop rates, inter-arrival times
___________________* M.S. Branicky, V. Liberatore, and S.M. Phillips. Networked control system co-simulation for co-design. Proc. ACC, 2003.

Extensions of ns-2 release*:• plant “agents”: sample/send output at specific intervals• control “agents”: generate/send control back to plant• dynamics solved numerically using Ode utility, “in-line” (e.g., Euler), or through calls to Matlab
Co-Simulation Components (2):Plant and Controller Dynamics
Also: TrueTime [Lund] (Simulink plus network modules)Ptolemy, SHIFT [UCB] (+ other HS simu. langs.)
Need: comprehensive tools (ns-2 +SL/LV/Omola +Corba)various HIL integrations (HW, µprocs, emulators)
___________________* M.S. Branicky, V. Liberatore, and S.M. Phillips. Networked control system co-simulation for co-design. Proc. ACC, 2003.

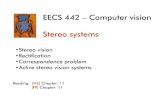
Analysis and Design Tools• Stability Regions* and Traffic Loci**
Both for an inverted pendulum on a cart (4-d), with feedback matrix designed for nominal delay of 50ms. Queue size = 25 (left), 120 (right)
___________________* W. Zhang, M.S. Branicky, and S.M. Phillips. Stability of networked control systems. IEEE Cont. Systs. Mag., Feb. 2001.** J.R. Hartman, M.S. Branicky, and V. Liberatore. Time-dependent dynamics in networked sensing and control. Proc. ACC, 2005.

Information Flow
• Flow– Sensor data– Remote controller– Control packets
• Timely delivery– Stability– Safety– Performance

Bandwidth Allocation for Control*
• Objectives:– Stability of control systems– Efficiency & fairness– Fully distributed, asynchronous, & scalable– Dynamic & self reconfigurable
___________________* A.T. Al-Hammouri, M.S. Branicky, V. Liberatore, and S.M. Phillips. Decentralized and dynamic bandwidth allocation in networked control systems. Proc. WPDRTS, 2006.

Queue Control: Results*
PI¤
P¤
___________________* A.T. Al-Hammouri, M.S. Branicky, V. Liberatore, and S.M. Phillips. Decentralized and dynamic bandwidth allocation in networked control systems. Proc. WPDRTS, 2006.

Synchronization: Ideas*
• Predictable application time– If control applied early, plant is not in the state
for which the control was meant – If control applied for too long, plant no longer
in desired state
• Keep plant simple– Low space requirements
• Integrate Playback, Sampling, and Control___________________* V. Liberatore. Integrated play-back, sensing, and networked control. Proc. INFOCOM, 2006.

Synchronization: Mechanics*• Send regular control
– Playback time• Late playback okay
– Expiration
• Piggyback contingency control
___________________* V. Liberatore. Integrated play-back, sensing, and networked control. Proc. INFOCOM, 2006.

Plant Output*
Open Loop Play-Back
___________________* V. Liberatore. Integrated play-back, sensing, and networked control. Proc. INFOCOM, 2006.

Cyber-Physical Systems Research
– Control theory:(stoch.) HS, non-uniform/stochastic samp., event- vs. time-basedhierarachical, composable (cf. Omola), multi-timescale (months to ms)
– Delays, Jitter, Loss Rates, BW• Characterization of networks (e.g., time-varying RTT, OWD delays)• Application and end-point adaptability to unpredictable delays
– Buffers– Control gains– Time synchronization
– Bandwidth allocation, queuing strategies, network partitioning• Control theoretical, blank-slate designs, Jack Stankovic’s *SP protocols
– Co-simulation, co-design– Application-oriented, end-to-end QoS (beyond stability to performance)– Distributed, real-time embedded middleware:
• Resource constraints vs. inter-operability and protocols• Sensors/transducers (cf. IEEE 1451, LXI Consortium), distributed timing services
(IEEE 1588, NTP; John Eidson: Time is a first-class object), data gathering (Lui Sha’s observability), resource management (discovery, “start up”), “certificates”

Thanks
• NSF CCR-0329910 on Networked Control
• Colleague: Vincenzo Liberatore, CWRU