Hybrid Intelligent SystemsHybrid Intelligent Systems for Robotics
43
Hybrid Intelligent Systems Hybrid Intelligent Systems for Robotics Prof Adrian Hopgood Prof Adrian Hopgood De Montfort University
Transcript of Hybrid Intelligent SystemsHybrid Intelligent Systems for Robotics

Hybrid Intelligent SystemsHybrid Intelligent Systemsfor Robotics
Prof Adrian HopgoodProf Adrian HopgoodDe Montfort University

OutlineBackground
Hi t– History– Spectrum of intelligence
Why hybrids?Multifaceted problems– Multifaceted problems
– Clarification and verification– Capability enhancement– Parameter settingg
Embedded hybridsC l iConclusion

Artificial Intelligenceg
A definition:– the science of mimicking human mental g
faculties in a computer
The beginnings:– Turing 1950– Dartmouth Conference 1956Dartmouth Conference 1956
1956…

2008...

Asimo video clipAsimo video cliphttp://asimo.honda.com/movie/qthttp://asimo.honda.com/movie/qt_download/intelligence_tech_300.
movmov

A spectrum of intelligenceg
expertiseexpertiseplanninginteractioncommon sense level of perceptioncoordination
understanding
coordinationreactionregulation

Spot the rabbit

Specialist end of the spectrumDENDRAL (1969)MYCIN (1976)SmartGov (2003)SmartGov (2003)ARBS / DARBS– ultrasonics (1993)– telecommunications (1994)( )– control of robot arms (2003)– plasma deposition (1998 2002)– plasma deposition (1998, 2002)– medical imaging (2006)

Why hybrids?y yMultifaceted problemsClarification and verificationCapability enhancementCapability enhancementParameter setting

Multifaceted problemsMultifaceted problems
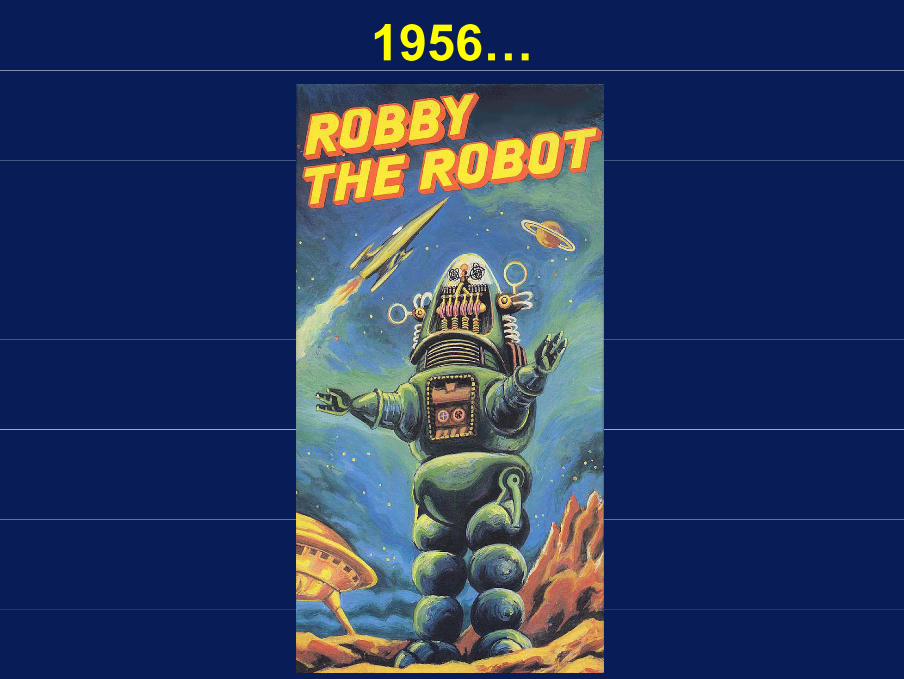
Agents within agentsg g

Blackboard multiagent modelg

DARBS: Distributed Algorithmic & Rule-based Blackboard System
Rule-based agentsInference mode #1
Rule-based agentsInference mode #2
Rule-based agentsInference mode #3
The Blackboard
Proceduralagents
Genetic algorithmagents
Neural networkagentsg g g

Some early applicationsy

Plasma Processingg



Tuning a Langmuir probeg g

Multivariable control

Embedded hybridsEmbedded hybrids

emDARBS on SARNet

Tileworld (Pollack and Ringuett, 1990)
10987654321112345678
Agent =
Hole =
910
Obstacle =
Tile =

TileWorld on DARBS

Processor & agent numbers
3 50
4.00
g
3.00
3.50p
2.50
Spee
dup
1.50
2.00
1.001 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
Number of agent KSs
1 Agent Processor 2 Agent Processors 3 Agent Processors4 Agent Processors 5 Agent Processors 6 Agent Processors7 Agent Processors 8 Agent Processors 9 Agent Processors10 Agent Processors 11 Agent Processors Starting point trend

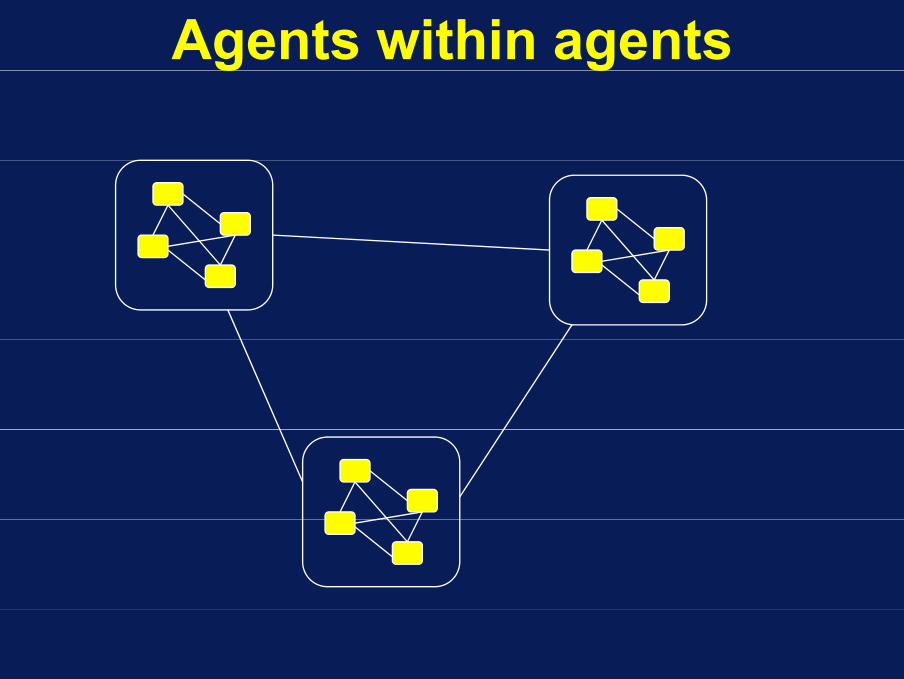
Clarification and verificationClarification and verification
Ultrasonic scanningg

Raw imageg



Verified interpretation

Capability enhancementCapability enhancement


Lamarckian/Baldwinian inheritance
Steepest gradient descent search beforeSteepest gradient descent search before fitness evaluation and selectionSearch the Hamming neighbourhood of each candidate solution for a fitter oneeach candidate solution for a fitter oneThen either:– replace the candidate solution with the fitter
one (Lamarck), or( ),– keep the candidate solution but substitute the
neighbour’s fitness value (Baldwin)neighbour s fitness value (Baldwin)

Hamming distancegNumber of bit positions that are differentHamming distance of 1:– 1101001 and 1100001– 1101001 and 1111001
Hamming distance of 2:Hamming distance of 2:– 0101100 and 1001100– 0101100 and 0100000
For you:For you:– 1101001 and 1000001– 0101100 and 1101001

The Effect of Learning Strategy on Solution Quality of Schwefel Function (d=4)-50
The Effect of Learning Strategy on Solution Quality of Schwefel Function (d=4)
100%B20%L40%L60%L
-10060%L80%L100%L
-150
Fitn
ess
-200
Aver
age
F
300
-250
-350
-300
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-350
Probability of Local Search

Th Eff t f L i St t S l ti Q lit f F1
3.95
4The Effect of Learning Strategy on Solution Quality of F1
100%B25%L50%L75%L
3.9
3.95 75%L100%L20%L
3.85
Fitn
ess
3.75
3.8
Ave
rage
F
3.7
3 6
3.65
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 13.6
Probability of Local Search

Parameter settingParameter setting

Genetic–fuzzy systems (Karr)y y ( )1
,µership,
t 1 t 4t 3t 2
Membe set 1
(low)set 4(high)
set 3set 2
0
M
n 2 n 3 x 1 x 2 n 4 x 3
Fuzzy variable
minmin
max
max min
max
Chromosome (binary):
Fuzzy variable
min4min3min2 max2 max3max1
( y)

Why hybrids?y yMultifaceted problems
( b dd d) bl kb d d l– (embedded) blackboard modelClarification and verification– use of supporting evidence
Capability enhancementCapability enhancement– Lamarckian/Baldwinian inheritance
Parameter setting– genetic–fuzzy– genetic–fuzzy

Kärcher RobocleanerKärcher Robocleaner video clipvideo clip
http://uk.youtube.com/watch?v=1zhttp://uk.youtube.com/watch?v 1zFU6BCR-lA

Intelligent robotics: the futureg
Bridging the intelligence spectrum through hybridsg y
E b dd d AIEmbedded AI
DARBS / emDARBSb dd d ll l h d– embedded parallel hardware
– new applications– open source

AcknowledgementsgARBS/DARBS/emDARBS
L N ll P t i k W K W h Ch– Lars Nolle, Patrick Wong, Kum Wah Choy, Gary Li, Heather Phillips, Hua Meng, N il W d k Ni h l H llNeil Woodcock, Nicholas Hallam
Plasma control– Nick Braithwaite, Phil Picton,
Jafar Al-Kuzee Lars Nolle Heather PhillipsJafar Al Kuzee, Lars Nolle, Heather PhillipsHybrid genetic algorithms– Tarek El-Mihoub