Hybrid Dynamic Route Planning Model for Pedestrian...
18
Research Article Hybrid Dynamic Route Planning Model for Pedestrian Microscopic Simulation at Subway Station Yongxin Gao , 1 Feng Chen , 1,2 and Zijia Wang 1 1 School of Civil and Architectural Engineering, Beijing Jiaotong University, Beijing, China 2 School of Highway, Chang’an University, Xi’an, China Correspondence should be addressed to Yongxin Gao; [email protected] and Zijia Wang; [email protected] Received 26 December 2018; Revised 19 March 2019; Accepted 26 March 2019; Published 17 April 2019 Guest Editor: Emiliano Cristiani Copyright © 2019 Yongxin Gao et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. To make agents’ route decision-making behaviours as real as possible, this paper proposes a layered navigation algorithm, emphasizing the coordinating of the global route planning at strategic level and the local route planning at tactical level. Specifically, by an improved visibility graph method, the global route is firstly generated based on static environment map. en, a new local route planning (LRP) based on dynamic local environment is activated for multipath selection to allow pedestrian to respond changes at a real-time sense. In particular, the LRP model is developed on the basis of a passenger’s psychological motivation. e pedestrians’ individual preferences and the uncertainties existing in the process of evaluation and choice are fully considered. e suitable local path can be generated according to an estimated passing time. e LRP model is applied to the choice of ticket gates at a subway station, and the behaviours of gate choosing and rechoosing are investigated. By utilizing C++, the layered navigation algorithm is implemented. e simulation results exhibit agents’ tendency to avoid congestion, which is oſten observed in real crowds. 1. Introduction Pedestrian simulation has engaged the attention of research- ers over the past few decades. It is not only a simulation technology to reproduce the temporal and spatial changes of pedestrian flow in real scenes, but also an important appli- cation of computer technology in traffic studies. Different technical areas, such as architecture, urban planning, and transportation, can benefit from the simulation of groups of pedestrians. e simulation can help to improve the efficiency, comfort, and safety of pedestrian transport, to provide references for planning, design, and facility layout, or to optimize passenger flow organization and emergency evacuation plan. e framework used for describing pedestrian traffic can be specified in a three-tier structure [1]. At the highest strategic level, the pedestrian agents generate the global route according to the activity planning and the topolog- ical network of building environment. e tactical level is performed in case of multipath choice. At the operational level, microscopic motions (e.g., walking in an area and moving in a queue) can be observed. To our knowledge, the development of behaviour models at the strategic level in the existing literature is fairly robust [2, 3] and a great deal of research has been dedicated towards modeling the operational-level movement of pedestrians [4, 5]. However, the intermediate tactical level is usually neglected. Generally, most global path planning (GRP) is static and cannot adjust to the changes of environment. Although some studies adopted a real-time global path planning [6], it always means a large amount of computing resources consumption. ough the operational-level navigation can take full account of the dynamic environment, but it is difficult to ensure an optimal route from an overall perspective due to the limited local information obtained by the agents. erefore, to make a balance of efficiency and flexibility, this paper proposes a hybrid path planning model, which combines GRP at strategic level with local route planning (LRP) at tactical level. As shown in Figure 1, during the journey from starting point to destination, a pedestrian is guided by a series of target Hindawi Journal of Advanced Transportation Volume 2019, Article ID 5207814, 17 pages https://doi.org/10.1155/2019/5207814
Transcript of Hybrid Dynamic Route Planning Model for Pedestrian...

Research ArticleHybrid Dynamic Route Planning Model for PedestrianMicroscopic Simulation at Subway Station
Yongxin Gao 1 Feng Chen 12 and Zijia Wang 1
1School of Civil and Architectural Engineering Beijing Jiaotong University Beijing China2School of Highway Changrsquoan University Xirsquoan China
Correspondence should be addressed to Yongxin Gao 13115312bjtueducn and Zijia Wang zjwangbjtueducn
Received 26 December 2018 Revised 19 March 2019 Accepted 26 March 2019 Published 17 April 2019
Guest Editor Emiliano Cristiani
Copyright copy 2019 Yongxin Gao et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
To make agentsrsquo route decision-making behaviours as real as possible this paper proposes a layered navigation algorithmemphasizing the coordinating of the global route planning at strategic level and the local route planning at tactical level Specificallyby an improved visibility graph method the global route is firstly generated based on static environment map Then a new localroute planning (LRP) based on dynamic local environment is activated for multipath selection to allow pedestrian to respondchanges at a real-time sense In particular the LRP model is developed on the basis of a passengerrsquos psychological motivation Thepedestriansrsquo individual preferences and the uncertainties existing in the process of evaluation and choice are fully considered Thesuitable local path can be generated according to an estimated passing time The LRP model is applied to the choice of ticket gatesat a subway station and the behaviours of gate choosing and rechoosing are investigated By utilizing C++ the layered navigationalgorithm is implemented The simulation results exhibit agentsrsquo tendency to avoid congestion which is often observed in realcrowds
1 Introduction
Pedestrian simulation has engaged the attention of research-ers over the past few decades It is not only a simulationtechnology to reproduce the temporal and spatial changes ofpedestrian flow in real scenes but also an important appli-cation of computer technology in traffic studies Differenttechnical areas such as architecture urban planning andtransportation can benefit from the simulation of groupsof pedestrians The simulation can help to improve theefficiency comfort and safety of pedestrian transport toprovide references for planning design and facility layoutor to optimize passenger flow organization and emergencyevacuation plan
The framework used for describing pedestrian trafficcan be specified in a three-tier structure [1] At the higheststrategic level the pedestrian agents generate the globalroute according to the activity planning and the topolog-ical network of building environment The tactical level isperformed in case of multipath choice At the operational
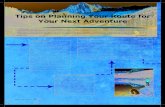
level microscopic motions (eg walking in an area andmoving in a queue) can be observed To our knowledgethe development of behaviour models at the strategic levelin the existing literature is fairly robust [2 3] and a greatdeal of research has been dedicated towards modeling theoperational-level movement of pedestrians [4 5] Howeverthe intermediate tactical level is usually neglected Generallymost global path planning (GRP) is static and cannot adjust tothe changes of environment Although some studies adopteda real-time global path planning [6] it always means alarge amount of computing resources consumption Thoughthe operational-level navigation can take full account ofthe dynamic environment but it is difficult to ensure anoptimal route from an overall perspective due to the limitedlocal information obtained by the agents Therefore to makea balance of efficiency and flexibility this paper proposesa hybrid path planning model which combines GRP atstrategic level with local route planning (LRP) at tactical levelAs shown in Figure 1 during the journey from starting pointto destination a pedestrian is guided by a series of target
HindawiJournal of Advanced TransportationVolume 2019 Article ID 5207814 17 pageshttpsdoiorg10115520195207814
2 Journal of Advanced Transportation
Strategic Level
Static globalroute planning
Tactical Level
Dynamic localroute planning
Operational Level
To update pedestrianrsquos position at each time step
Modify
Target Points
Figure 1 The three levels of navigation algorithm
pointsThese target points are generated byGRP based on thestatic building environment and dynamically modified by theLRP with the changing surroundings
For the behaviour of multipath selection at tactical levelutility and probability are often used to solve this problemSome researches defined the utility as time [7] or a functionof some factors of the path such as distance excitement anddensity [8] Reference [9] defined the utility as a sum of therelative values of distance and density Paper [7] evaluatedthe exit choice by the maximum of the distance-based timeand density-based time In these studies the route with mostutility or least disutility will be definitely chosen Howeverthe choice of a pedestrian is not always sufficiently sensibleThey cannot always make accurate estimations and optimalchoices To reflect the randomness of path choice someresearches introduced probability into this field Reference[10] expressed the probability of selecting a certain path asa combination of the reliability probability and the cognitiveprobability Paper [11] evaluated the probability of exit choiceby a weighted sum of the distance-based probability andthe density-based probability The weights depend on thedegree of deviation of the alternative paths This modelwas also applied to the selection of ticket gates in subwaystations Reference [12] calculated the probability by anexponential function of distance and queue number Amongthe studies attempting to model route choice behaviourthe Logit model based on the utility of each route [13]has been proved as a popular and practical approach Themixed nested Logit model [14] multinomial Logit model[15] and other Logit models with complex forms have beenproposed to estimate the behaviour of multipath choiceReferences [16 17] constructed the utility of a path by a linearweighted sum of distance and time In some studies thetime factor was replaced by density [18] Paper [16] suggestedthat pedestriansrsquo preferences for the factors are related totheir speed Reference [19] proposed a node selection modelof ticket gates at metro stations and the linear weightingutility consists of multiple factors Paper [14] evaluated thecost by a sum of distance-based time and density-basedtime Unfortunately the development of probability andgeneralized utility in these studies are usually the resultsof mathematical matching with multiple factors and lackof practical physical significance This is not conducive toexplaining the fundamental motivation of pedestrians to
make choices and may lead to the deviation between thesimulation results and the actual situation Consequently thispaper aims to model the individual desires and interests ofmultipath choice to generate realistic community behaviours
In the literature the passenger simulation of multipathchoice behaviour aims to achieve two purposes One purposeis to explore the behaviour pattern of pedestrians in realityand then reproduce and estimate their selections Someexperiments have been made to explain the factors that affectpedestriansrsquo choices such as density distance visibility [20]and social influence [21 22] There are also data collectedby stated-choice investigation [23 24] and video [17] used toanalyze passengersrsquo selection behaviour Another purpose isto find out the optimal guidance scheme of the pedestriansto each path to get a utility balance or to get the leastevacuation time [25 26] This is often used in the layoutdesign and evacuation organization Paper [27] designed aclass of variable guide sign systems based on the dynamicbalance of each exit Obviously the former purpose is thefoundation of the latter Only by understanding the mech-anism of pedestrian selection behaviour the appropriateguidance management can be made Therefore this paperaims to reveal the mechanism of pedestrian choice behaviourin terms of psychology
In design and operation stages of metro system pedes-trian simulation has become a necessary low-cost andeffective method to improve facilities layout and passengerorganization It is of great significance to ensure the safetyand good performance in operation In order to achieve areliable simulation result the accuracy of simulation mod-els and parameters are particularly important At presentthere are some commercial software aiming to simulatepassenger behaviour such as Pathfinder Exodus and PTVViswalk These tools have different characteristics and theirown specific application range Although some standardizedverification and validation documents are published as areference these documents are directed at building environ-ment which is not necessarily used for subway scenes Thismotivated the development of dedicated models and moreaccurate knowledge of pedestrian movement at differentlocations and facilities in subway In particular the multipathchoice behaviour in subway stations at ticket gates [11 19]stairsescalator [28] and the waiting position on platform[29] is modeled in some researches Similarly the passengersrsquo
Journal of Advanced Transportation 3
motion during the check-in process in a high speed railwaystation is also studied in [30] However the whole process ofticket gate selection is not completely explored This paperattempts to make up this gap The behaviour of ticket gateselection is decomposed into several stages and embedded inthe navigation model
The multipath selection occurs when a pedestrian facesmultiple paths [26] exits and intermediate nodes Neverthe-less the selection of multiple intermediate nodes such as theticket gates in a subway station is different in some detailsfrom the other two kinds of multipath choices Specificallyin order to avoid interference the exits are usually dispersedin space Differently intermediate nodes such as servicewindows and ticket gates are usually centralized As a resultall the nodes are visible to pedestrians in geometric spaceDifferent from the exits the intermediate nodes are not theend of trip So rather than just focusing on the conditionbefore passing the nodes the condition after passing suchas the distance between the nodes to the next target pointshould also be taken into account Furthermore the nodeselection may involve some activities like queuing and ticketchecking Therefore as pedestrians would adopt differentbehaviours to deal with these three kinds of multipath situ-ations it is inappropriate to model them by the same modelFor example there are some unreasonable assumptions whenapplied the exit-choice model to the selection of ticket gates[11] For this reason some necessary adjustments are made tothe scalable LRPmethod proposed in this paper so as to applyit to the selection behaviour of ticket gates
Uncertainty always exists in system components andprocesses which are normally resulting from uncertain costin nature and deviations in subjective judgments Such avariety of uncertainties may become more compounded bycombinations of uncertain information presented inmultipleforms Previously a number of research works for uncertainmethods in traffic simulation were undertaken Reference[31] pointed out the effect of environmental uncertainty oncooperation of evacuation crowd and evacuation efficiencyPapers [32 33] optimized the evacuation organization whenthe demand uncertainty and capacity uncertainty were takeninto account Actually uncertainty also exists inmany aspectsof pedestrian path selection For instance since pedestrianshave the characteristics of rational irrationality and random-ness they do not always make the best choice [34] andmake the same decisions under the same circumstances Inaddition pedestrians have different preferences of choos-ing path Their perceptions of the distance and the socialinfluence factors are different [21] Reference [35] pointedout that the evacuees could be divided into the patient andthe impatient The patient evacuees try to avoid physicalcontacts but the impatient evacuees vie for the emptytarget cell by paying the effort Similarly [36] divided theminto the active and the conservative Reference [12] evenconsidered four types of window choice strategies It hasbeen proved that the uncertainties will affect the results ofpath selection but they have not been explicitly addressedin the existing literature In this paper the uncertaintyunderlying in route planning will be taken into accountin three ways the estimation of factors the randomness
of decision-making and the subjective individual prefer-ence
In this paper a three-level navigation algorithm is pro-posed to capture passenger movement in subway stationEspecially the improved pedestrian route planning modelbalances the certainty of global route planning at the strategiclevel and the flexibility of local route planning at the tacticallevel The local route planning model is developed basedon a passengerrsquos psychological motivation The uncertaintiesand preferences within the process of path selection arefully considered With this navigation algorithm the mostappropriate path will be activated according to real-timeenvironment The difference between simulation results andreal situation can be minimized
The study begins with the method of abstracting routeplanning network from realistic environment in Section 21and generating a collision-free global route in Section 22Following a novel local route algorithm is described inSection 23 The field data collected in actual subway stationsis given in Section 31Then an application to the selection ofticket gates is provided with some necessary adjustments inthe following parts of Section 3 Furthermore the advantagesof the proposed models are demonstrated with examples inSection 4 and last Section 5 concludes with a summary andan outlook for future work
2 Model
21 EnvironmentMapModeling Before route planning envi-ronment map should be established to mark the location ofpedestrian and obstaclesThrough expressing the obstacles asabstract geometric figures the walking area in real world canbe translated into perceivable environment information forpedestrians
The common methods to model environment are obsta-cles polygon barrier-free zone hybrid space and path dia-gram [37 38] Since pedestrians in subway station only needto recognize obstacles to avoid collision this paper adoptsobstacles polygon method to divide the station environmentinto two regions walking area and obstacle area Obstacleareas are abstracted as approximate polygons All the otherareas except obstacles are considered as walking areas on thebasis of continuum space model
22 Global Route Planning Model Based on Visibility GraphGlobal route planning is indispensable in a pedestrian sim-ulation It can optimize the layout of guidance facilitiesreduce calculating quantity and decrease errors caused bymanual operation especially in an environment with lots ofobstacles The main route planning algorithms are visibilitygraph free space and grids The complexity of free spacemethod increases with the amount of obstacles dramaticallyand this method cannot find the shortest path in any casesThe stored environment information of grids method is hugeand the suitable grid size is difficult to determine If gird sizeis too small the calculated amount will be too large whilethe shortest path may not be got with too big grid In theliterature most algorithms for global planning represent the
4 Journal of Advanced Transportation
Expanding obstacle
Real obstacle
pedestrian
Figure 2 Obstacle expanding illustration
connectivity of walkable space in the environment as a graphand perform search queries for each agent to determine acollision-free path We do not diverge from previous work inthis aspect and adopt visibility graph method to plan globalroute
According to the method of visibility graph the realisticenvironment is replaced by approximate polygon in propor-tion and the visible graph is composed by connecting all no-cross and unscreened lines By using Alowast algorithm [39] theshortest path between origin and destination can be found onthe visible graph which is the global navigation route
In global route all of intermediate points except originand destination are regarded as convex vertex of obstacles Intraditional visibility graphmethod a pedestrian is consideredas a point While in fact he occupies an area As a result apassenger overlaps with margin of obstacles when he walkson the global route [40] To avoid collision this papermakes acorrection to the intermediate points using half of pedestrianmaximum size as shown in Figure 2The virtual obstacles areused to calculate a global route
23 Local Route Planning Model Based on Estimated TravelTime Global route planning is used to find out the wholeroute from origin to destination If there are multiple routesthe shortest path in terms of Euclidean distance is searchedHowever when the pedestrian density is large it will causeunrealistic walking behaviour For example during pedes-trian passing a ticket gate at a subway station global routeplanning strategy will determine a fixed gate thereforepedestrians will wait in line at this gate and the other gateswill be left unused However according to observation andvideo analysis of pedestriansrsquo route choice behaviour at metrostations pedestrians will choose a farther unoccupied gate tosave travel time in practice The local route planning modelproposed in this paper is made in order to solve this problem
A pedestrian makes the route choice decision accordingto what has been seen in the surroundings and what has beenformulated in his or her mind Specifically environmentalfactors include path distance or travel time directness ofpath capacitywidth of exit visibility and service level [1641] The individual implicit factors include physical ability(walking speed) subjective preference familiarity with the
environment and following behaviour [42] From a review ofthe previous studies three factors namely the route lengthpassing time and density of pedestrian flow are identified tohave significant impacts on a pedestrianrsquos behaviour of routechoice [43]The route length is the primary factor that affectsroute choice behaviour and the crowdedness is a measureto reflect discomfort [44] What is more it is found that apedestrian tends to base his exit choice on time-dependentinformation rather than on time-independent information[9 45] Therefore the local route planning model proposedin this paper allows pedestrians choose a path accordingto the estimated passing time which is determined by thelength and the crowdedness of each local path shown as(1) and (2) The local route planning for each pedestrian isindependent and dynamic Namely which path will be theoptimal depends on the individual and the moment
119880119894j = 119881119894j + 120576119894j (1)
119881119894j = 120596119873119894j ∙ 119881119873119894j + 120596119871119894j ∙ 119881119871119894j (2)
where 119880119894j is the utility for pedestrian 119894 choosing pathj i=12 j=12 The random error 120576119894j is independentidentically distributed and subject to a Gumbel distribution119881119894j is a certain item indicating the estimated passing timeby pedestrian It consists of waiting time and walking time119881119873119894j 119881119871119894j is the estimated waiting time and the estimatedwalking time respectively 120596119879119894j and 120596119871119894j are the perceivedweights
In real-world situations passengers generally give aglance of the possible routes and make a rough estimation byhunch rather than by accurate calculations when making aroute choice Thus uncertainty of decision variables shouldbe introduced into the route choice model To an appropriatelevel the variability in time cost and uncertainty could helpldquoblurrdquo the agentsrsquo route choices In this way it can achievesimulation results that conform well to real situation
231 Passengersrsquo Perception of Time During the process ofa pedestrianrsquos journey on one hand he needs to walk for acertain distanceThe time spent on walking is called ldquowalkingtimerdquo On the other hand if there are congestions on the wayand the pedestrian need to queue for service he would haveto spend extra ldquowaiting timerdquo According to temperamentand time urgency pedestrians may have different values oftime (VOT) on ldquowalking timerdquo and ldquowaiting timerdquo It isobserved that there is a strong negative correlation betweenutility coefficients of distance and density meaning that anindividual who has a strong tendency to avoid congestion islikely to be more indifferent about walking for long distancesto reach a further less-congested path and vice versa [46]
232 Walking Time Pedestrian 119894 estimates the walking timeof the j-th local path as
119881119871119894119895 =sum1198711198981198941198951015840V119894
(3)
Journal of Advanced Transportation 5
V119894 is the desired walking speed of pedestrian i sum1198711198981198941198951015840 isthe estimated total length of local path 119895 If we divide path119895 into several segments the real length of segment 119898 is1198711198981198941198951198711198981198941198951015840 is the estimated length and can be calculate as (4)The estimated error is limited within 10 and 119896 is subject toa Gaussian distribution As a result 1198711198981198941198951015840 is also in a Gaussiandistribution with the average of 119871119898119894119895 and within range of[09sdot119871119898119894119895 11sdot119871119898119894119895]
1198711198981198941198951015840 = 119871119898119894119895 + 120576 (119871119898119894119895)120576 (119871119898119894119895) = 119896 ∙ 119871119898119894119895
119896 sim 119873 (0 0001) |119896| le 10(4)
It is worth noting that although the value of the estimatedlength has an error the order of local paths in length shouldnot be changed To ensure the right order of estimateddistances we should make a limit to the scope of estimatedlength Before estimating the length of segment 119898 for eachlocal path sort the actual distances from short to long Thencompare every two adjacent distances For 119871119898119894119901 lt 119871119898119894119902 if11 sdot 119871119898119894119901 gt 09 sdot 119871119898119894119902 the estimating range should be adjustedto
1198711198981198941199011015840 isin [[09 lowast 119871119898119894119901
(11 lowast 119871119898119894119901 + 09 lowast 119871119898119894119902)2 ]
]
1198711198981198941199021015840 isin [[(11 lowast 119871119898119894119901 + 09 lowast 119871119898119894119902)
2 11 lowast 119871119898119894119902]]
(5)
233Waiting Time Waiting time is estimated by the productof the estimated number of passengers in queue (1198731015840119894119895) and theaverage service time (1199050) as shown in (6)
119881119873119894119895 = 1198731015840119894119895 ∙ 1199050 (6)
Pedestrian 119894 would estimate the number of passengers queu-ing at local path 119895 as
1198731015840119894119895 = 119873119894119895 + 120576 (119873119894119895)
120576 (119873119894119895) =
0 119873119894 le 30 plusmn1 119873119894119895 isin [4 5]0 plusmn1 plusmn2 119873119894119895 ge 6
119875 120576 (119873119894119895) = 119883119901 = 13 (119883119901 = minus1 0 1)
119875 120576 (119873119894119895) = 119883119902 = 15 (119883119902 = minus2 minus1 0 1 2)
(7)
119873119894119895 is the actual number of queuing at local path 119895 whenpedestrian 119894makes decision 120576(119873119894119895) is estimation error and itwould enlarge as the queuing passenger population increases
Specifically in case of no more than three pedestriansqueuing pedestrian 119894 can identify the number accurately Ifthe number is greater than 3 the estimated error would obeya Discrete Uniform Distribution
234 Discrete Choice Model After the walking time and thewaiting time having been estimated the final piece of thepuzzle is how to decide which local path a passenger will passthrough As a problem of discrete choice we adopt the Logitmodel The probability of pedestrian 119894 choosing local path 119895is
119875119894119895 = exp (minus119881119894119895)sum119872119895=1 exp (minus119881119894119895)
119872sum119895=1
119875119894119895 = 1(8)
For a completely rational pedestrian he would choosethe most effective path to go through While in practice apedestrianrsquos decision is effected by some random factors suchas emotion and the pedestrians around him For this reason apedestrian will not accurately evaluate the route options andas a result the path with the smallest cost is not always chosen[47]Therefore the final decision is determined by a randomnumber according to the probabilities 119875119894119895
3 Model Application and Discussion
UtilizingMFCprovided byMicrosoftVisual Studio we devel-oped a pedestrian simulation tool to realize our navigationalgorithm Specifically to enable agents to autonomouslynavigate in complex spaces and crowded environment thetool combines the visibility graph at strategic level multistageroute choice scheme at tactical level and a variant of SocialForce Model at operational level The local route planningis realized by a target converter and local route settings Apedestrian can temporarily deviate from the global routetake reasonable detours to optimize his local route andreturn to global route after passing the local route regionAt the operational level a pedestrianrsquos movement towardsthe target point is driven by a resultant force which isaffected by the goalrsquos attraction barriers and other agentsThe framework of the layered navigation algorithm is shownin Figure 3
Thanks to the developed simulation tool the routechoices and crowd characteristics estimated by the navigationalgorithm can be favorably compared to the actual situationsin practice During simulation all the agent movements arerecorded to a database Then it can be analyzed to determinesomekey performancemetrics such as crowddensity journeytime and flow rates In addition the simulation can be playedback in real time (or faster) to provide a rich visual meansfor verifying and communicating Though the proposednavigation algorithm and simulation tool are applicable inmany scenarios the automatic fare gate in subway stations istaken as an example in this work
6 Journal of Advanced Transportation
Environment Map Modelling
Global Route Planning
To activate Local Route Planning and get the target point from the alternative local node selection
Pedestrian Setting
in a local path area
YesNo
Move to the target point driven by Social Force Model
Pedestrians generation on schedule
Get the target point from the global route
strategic level
tactical level
operational level
gender desired velocity OD preference
At time ti is Pedestrian m
Figure 3 The framework of the layered navigation algorithm
Walk direction Walk direction
OriginDestination
(a)
Walk Direction
Origin
Destination
(b)
Figure 4 The two simulation scenarios (a) symmetric layout and (b) asymmetric layout
31 Empirical Data and Simulation Settings According tofield survey in subway stations it is found that there aredifferent traffic lines because of the spatial layout of ticketgates Roughly the situation can be divided into two typicalscenarios ie the symmetry and the asymmetry scenarioAs shown in Figure 4 in the symmetry scenario passengersjust move forward and pass through the gate directly In theasymmetry scenario passengers need to move towards theticket gates firstly and then make a turn to pass through thegate In the following sections the gates are numbered as 1 2 5 in turn from top to bottom At the strategic level onlya fixed one of these gates could be counted as a part of globalroute But in practice a pedestrian would choose the optimalpath to replace the default one
To trigger the local route plan a virtual influence area isset in front of the ticket gate area where local route planningis needed as shown in Figure 5 When a pedestrian walksinto an influence zone the local route plan will be activatedto substitute global routeThe pedestrianrsquos destination will betemporarily reset to the local pathrsquos target point marked asD in Figure 5 which is normally the entrance of a stairway
to platform or a turning point of path Point O is the real-time location when pedestrians enter into the influence zoneIt represents the origin of local path Points Aj Bj are theentrance and the exit of gate 119895 The concentration zones areset to count how many pedestrians are queuing at each gateThe polygonal line OAjBjD describes local path 119895 It canbe divided into three segments in this scenario OAj AjBjand BjD Their lengths are 1198711119894119895 1198712119894119895 and 1198713119894119895 respectivelyHere 1198712119894119895 has the same length for each local path it can beignored in calculation Then the estimated walking time canbe simplified as
119881119871119894119895 =(11987111198941198951015840 + 11987131198941198951015840)
V119894(9)
In order to get reliable simulation results it is of greatimportance to assign the parameters of model with practicalvalues Generally in the design of critical facilities theperformance under peak passenger flow is a vital indicatorBased on field data obtained in peak-15-minute of morning
Journal of Advanced Transportation 7
A2
A3
A1
L1 L2 L3
Influence zoneConcentration zone Ticket gates
O
D
B2
B3
B1I
II
III
Figure 5 Illustration of local route algorithm
000
005
010
015
1 2 3 4 5service time (s)
perc
enta
ge (
)
000
004
008
012
016percentage
Figure 6 The service time of ticket gate based on field survey
and evening rush hour passengersrsquo arriving rate at the gatearea is subject to Poisson distribution (Equation (10)) Theaverage number of passengers is 40 per minute The desiredspeed ranges from 08ms to 15ms
119875 (119883 = 119896) = 120582119896119896 ∙ exp (minus120582) 119896 = 0 1 sdot sdot sdot (10)
where119883 is the arrival interval P is the probability and 120582 is aparameter
The value of service time 1199050 in (6) can be measured bythe interval between two passengers entering or leaving acertain ticket gate Some investigations are carried out insubway stations at morning peak on weekdaysThere is heavypassenger traffic during these periods and the passengersare always in a rush to go to work In the investigation werecorded the time interval between passengers leaving theend of the gate (point Bi in Figure 5) and the results areshown in Figure 6 It is observed that the service time for apedestrian obeys a positive skewness distribution It rangesfrom 08 s to 37 s and the mean value is 20 s So the value of1199050 in (6) can be regard as 2 seconds
The time for a passenger passing through the gate (frompoint Ai to Bi in Figure 5) is also observed in survey Theresults are shown in Figure 7 More than 80 passengers cango throughAiBi within 15 ssim 29 s and the average is 24 sThelength of a gate is 14m According to this the average speed
of a passenger passing through the gate can be obtainedAs shown in Figure 7(a) the distribution of passing speedpresents a normal distribution with an average of 065msInterestingly there is a long tail of the distribution of thepassing time (Figure 7(a)) and it disappears by transformingto speed (Figure 7(b))
In terms of time perception the passengers in a subwaystation can be summarized into three types The first one isadventurous They are active and more annoyed with time-waste of standing in a long queue than taking detour for afaster pass So their VOT of waiting time is greater Indeedcommuters in morning peak and passengers who are pressedfor time to catch a train or a flight are usually adventurousIn addition passengers who have higher requirements for acomfortable walking environment are more willing to choosea far path to avoid crowd they are also adventurous Thesecond type is the conservative such as the elderly Becauseof their difficulty in moving and other reasons they prefera path with shorter walking distance and without bypass Intheir views waiting is much more convenient than walkingaround In this case the VOT of walking time is 12 and ofwaiting time is 08 [48] For some mild passengers thereis no preference of waiting and walking and both couldbe interpreted as ldquonormalrdquo time Their perceived time isequivalent to the real time and the VOT is 1 The perceivedweights in (2) can be valued as (11) These values are alsoreferred to simulation experiments It is the best scheme tokeep the simulation results consistent with actual situation
120596119873119894 = 12120596119871119894 = 08
if temperament is adventurous
120596119873119894 = 08120596119871119894 = 12
if temperament is conserved
120596119873119894 = 10120596119871119894 = 10
if temperament is mild
(11)
8 Journal of Advanced Transportation
000
005
010
015
020
025
2 4 6passing time (s)
perc
enta
ge (
)
000
005
010
015
020
percent
(a)
00
01
02
025 050 075 100passing speed (ms)
perc
enta
ge (
)
005010015020025
percent
(b)
Figure 7 (a)The time of passing through a gate based on field survey and (b) the calculated passing speed
000
005
010
015
0 2 4 6
feeding time (s)
perc
enta
ge (
)
000
005
010
percent
Figure 8 The feeding time based on field survey
To pass through the ticket gate a special activity must beperformedmdashto check the card Due to individual habit andthe familiarity with subway the card feeding time of eachpassenger would be different In most cases scanning timeranges from 05 s to 20 s and the average value is 11s asshown in Figure 8 Occasionally some greater feeding timecan be observed because of a failure to prepare the smart cardin advance and improper operation The maximum value weobserved during rush hour is 738 s
The movement of passengers in subway stations and thesituations of passing through the ticket gates are also recordedin field survey the details will be mentioned in the followingsections
32 Multistage Route Choice Scheme Local path selection isa dynamic process The volume of passengers at each gateis time-varying and the utility value of each local path isalso changing When a pedestrian realizes that the utilityvalue of his original choice obviously increased or thatanother path is obviously superior to the original one hewill reevaluate the utility of each path and may change hischoice To solve the problem of reselection some studiesupdated the selection choice at each time step [8] Howeverthis leads to a pingndashpong effect [9] This drawback can be
corrected by using inertial system and relaxation processesWith the inertial system a new selection will be adoptedonly when it gains a certain increment in contrast to the oldselection [7]With relaxation processes the selection updatesin a given time interval such as 10 seconds [14 16] Thesemethods can achieve good results under certain conditionsHowever in a subway system it is difficult to determine anappropriate threshold for the inertial system and a time inter-val of reselection for the time-based relaxation processesFortunately according to field studies the selection processof passing through ticket gates can be abstracted into threestages (Figure 9) Firstly a pedestrian generally begins toconsider which gate is suitable and make a decision in frontof the gates with a distance of 30m Then he moves towardsthe target gate and always pays attention to the surroundingsIn most cases if necessary a selection change would be madein front of the gates with a distance of 17m Next when he isclose to the gate and prepares to check the card in one case hemay change his choice for the third time The case is that thepassenger in front of him occupancies the gate for a long timeand the next gate is unoccupied The location for the thirdchoice is set in front of the gates at a distance of 10m
Unlike the first choice as the pedestrian is considerableclose to the gates when he makes the second-time and thethird-time route choices he would pay more attention tothe distance between his current position and the gate (ieOAj) So the estimated walking time can be simplified to (12)What is more at that time the estimations on distance andpopulation size are relatively accurate He would have moreconfidence in his judgment and will choose the fastest pathas indicated in (13)
119881119871119894119895 =11987111198941198951015840V119894
(12)
Optimal local path for ped 119894= 119871119900119888119886119897 119875119886119905ℎ119895 | 119881119894119895 = min (1198811198941 1198811198942 sdot sdot sdot 119881119894119872)
(13)
As a passenger arrives at the gate hewill stop to press cardand then pass through When a passenger is scanning card
Journal of Advanced Transportation 9
10 m
17m
3 0m
Walk on Local Path
Walk on Global Path
Back to Global Path
First Choice Second Choice
Third Choice
Press Card
025m
Figure 9 The locations to make the multistage route choices
Table 1 Algorithm of local route planning
Input(a) A set of local path J(b) Preference of pedestrian i 120596119873119894119895 and 120596119871119894119895(c) Current speed V119894 and position (xi yi) of pedestrian i at time t
Output A suitable local path for pedestrian i at time t1 For each local path j in J do
2 estimate total walking distance sum1198711198981198941198951015840 by Equations ((4) (5)) (when pedestrian iis closed to the gatessum1198711198981198941198951015840 can be simplified to 11987111198941198951015840 in Equation (12))
3 calculate walking time 119881119871119894119895 by Equation (3)4 estimate the number of passengers queueing1198731015840119894119895 at local path j by Equation (7)5 calculate waiting time 119881119873119894119895 by Equation (6)6 calculate the estimated passing time of path j by Equation (2)7 End for8 If pedestrian i is closed enough to the ticket gates then
9 pass through the local path with minimum estimated passing time by Equation(13)
10 else calculate the probability 119875119894119895 of pedestrian i choose local path j by Equation (8)11 choose a suitable local path for pedestrian i based on 119875119894119895 and a random number12 End if
the front edge of his body is almost tangent to the entrance ofthe gate So the position of pressing card is set 025m aheadeach gate as shown in Figure 9
33 Results of Local Route Choice In order to test theproposed LRP model (the algorithm is summarized inTable 1) two experiments are carried out with the typicalscenarios (shown in Figure 4) The ratio of pedestrians withdifferent preferences is assumed as 111 The simulation lastsfor 5 minutes with 200 passengers In addition the actual
passenger flows of each gate in the two scenarios are alsoobserved in Beijing Subway at peak hours As shown inFigure 10 it indicates similar passenger distributions at eachgate in field investigations and simulation results Specificallyin the symmetric scenario most passengers go through thethree gates in the middle which are the shortest paths Whilethere is less passenger flow of the farthest gates 1 and 5 allthe 200 passengers continued to pass through the gates from12 s to 342 s and the average service level of the gates is36 personmin Similarly in the asymmetric scenario the
10 Journal of Advanced Transportation
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
Figure 10 Comparison of simulation results and survey data under symmetric layout (left) and asymmetric layout (right)
position 2
origin
position 1 position 3
destination
position 4
Waiting time(t2)
Pre-passing walking time(t1)
Post-passing walking time(t3)
Total time (t)
gate 1
gate 2
gate 3
gate 4
gate 505 m
Figure 11 Measurement positions and travel time
gates with the shortest distances (gate 4 and gate 5) have thelargest passenger flows accounting for 70 Due to the longdistance the number of passengers passed through gate 1 andgate 2 is small especially gate 1 only 4 persons passed Allpassengers passed through the gates within 10 s to 343 s
As shown in Figure 10 in the asymmetric scenario thepassenger flow of each gate exhibits a more nonuniformdistribution To gain an insight into the distribution ofpassengers with different preference the simulation results ofthe asymmetric scenario is a good case to illustrate this issueAs shown in Table 2 the distribution of the adventurous isobviously different from the others For the conserved andthe mild more than 40 percentage of the pedestrian volumepass through the nearest gate 5 and the total number ofpedestrians passing through from the two nearest paths (gate4 and 5) accounts for more than 70 In contrast most ofthe adventurous pass through gate 3 and 4 rather than thenearest gate 5 This is thanks to the fact that the nearest gate5 is always occupied by the conserved and the mild As a
result in order to avoid congestion the adventurous have topass through the farther gates In addition there are a fewof adventurous pedestrians pass through gate 1 the farthestpath However the conserved and the mild almost neverchoose gate 1 Therefore in the condition of a large numberof passengers passing through ticket gates the adventurouswould make an important contribution to the balance offacilities utilization
34 Passing Time To clarify the effects of passenger prefer-ence on local route decision-making we set four positions torecord the travel time for each pedestrian during simulationAs shown in Figure 11 the first position is the origin pointThe second is 05-metre ahead to the gatesThe third positionis at the front edge of gates where passengers are just walkinginto the gates The last position is the destination of pathThen four periods of time could be defined Specificallywaiting time (1199052) is the period for a passenger walking fromposition 2 to position 3 It includes the time of walking
Journal of Advanced Transportation 11
Table 2 Results of local route choice for different passengers
Temperament gate1 gate 2 gate 3 gate 4 gate 5 Totaladventurous 4 12 28 31 24 100 67 pconserved 1 9 17 31 41 100 70 pmild 0 5 21 32 43 100 63 pTotal 2 9 22 32 36 100 200 p
150
155
160
165
adventurous conserved mild
Tota
l Tim
e (s)
180
185
190
195
200
adventurous conserved mild
Wai
ting
Tim
e (s)
70
73
76
79
adventurous conserved mild
Pre-
pass
ing
Wal
king
Tim
e (s)
55
60
65
70
adventurous conserved mild
Post-
pass
ing
Wal
king
Tim
e (s)
Figure 12 The passing times for different passengers
scanning card and queuing up ldquoPrepassing walking timerdquo(1199051) is the time taken to reach position 2 from the originand ldquopostpassing walking timerdquo (1199053) is the time spent fromposition 3 to the destinationThe total time spent in thewholejourney from origin to destination is defined as t
As the expected speed and scan-card time of differentpedestrians follow the same distribution the walking dis-tances and queuing time of pedestrians can be compared
using the four time periods In the same way take theresults of the asymmetric scenario for example As shownin Figure 12 the conserved pedestrians who prefer to wait ata congested gate spend more time on waiting and less timeon walking And for the pedestrians avoiding congestion theresults are completely the opposite For the mild the timethey spend and the distance they traveled at each stage arealways at the middle level In particular the adventurous
12 Journal of Advanced Transportation
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
Figure 13 Four simulation cases with different choice preferences under symmetric layout (left) and asymmetric layout (right)
Table 3 The values of MD for different passengers
MD adventurous conserved mild Totalsymmetric layout 40 56 30 36asymmetric layout 28 48 36 28
passengers have the longest walking time (786 s beforepassing and 673 s after passing) and the shortest waitingtime (186 s) This is in consistent with the hypothesis thatthey prefer to farther path to avoid queuing On the contrarythe conserved passengers have the longest waiting time (194s) but get to the destination faster by walking the shortestdistance (total time is 1526 s) Although the adventurouswait 008s less time than the conserved they walk for 127smore than the conserved As a consequence the adventurousspend 090 s on the whole journey more than the conservedon average This is a kind of ldquofast is slowrdquo phenomenonWith the given population size and passengerrsquos compositionfrom an individualrsquos perspective it seems that waiting andpassing through the near paths is the most time-savingstrategy
35 Individual Preference The three kinds of personalityin this paper actually map different choice preferences Inorder to further investigate the differences among themfour simulation cases are established In the first three casesall pedestrians have the same character In this way theperformance of a kind of passengers can be revealed solelywithout interference from other types of passengers As acomparison each pedestrian in Case 4 would have one ofthe three choice preferences randomly while the passenger
volume stays the same Tohighlight the impact of preferencesthe passenger load in the four cases is triple as much asthe normal situation The passenger flow passed througheach gate is shown in Figure 13 In the four cases of thesymmetric scenario there are small passenger flow of the twomarginal gates (gate 1 and 5) Meanwhile the adventurousdisplay a better balance at the three middle gates and themildachieve a suboptimal balance whereas the passenger size ofthe conserved pass through the middle gate 3 is significantlyhigher than other cases In the asymmetric scenario Case 2(only the conserved) and Case 3 (only the mild) have similarresults the shorter distance a path is the more passengerspass through However Case 1 (only the adventurous) has adifferent performance the passenger population of each gateis much better balanced Except for the farthest gate 1 theproportions of the adventurous pass through each gate arealmost the same
To evaluate the passenger distribution the mean devi-ation (MD Equation (14)) is introduced as a coefficient ofuniformity The evaluation results are shown in Table 3 Alarger value of MDmeans a more uneven distribution of pas-sengers at each gate and a poorer utilization of the facilitiesFor instance in the symmetric scenario there is a seriouslynonuniform distribution of the conserved passengers withthe biggest value ofMD (56) In the asymmetric scenario theMD value of the adventurous is the smallest and the facilities
Journal of Advanced Transportation 13
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
Prop
ortio
n
Prop
ortio
n
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
Figure 14 The survey data and simulation results under symmetric layout (left) and asymmetric layout (right)
are made best use in this case Although the distributions ofthe mild and the conserved are similar the mild present abetter balance than the conserved Actually the MD values ofthe conserved are the biggest in the both scenarios and theyare not conducive to make full utilization of facilities
Interestingly with mixed choice preferences Case 4 ismore in line with the practical condition Both in thesymmetric and asymmetric scenarios Case 4 could achievewell balanced distributions Furthermore by a comparisonwith the simulation results in Section 33 (Figure 10) itcan be found that with the increased population size thedistribution of passenger flow of each gate is more balancedand as a result the facility utilization is improved
MD = 1119873119872sum119895=1
10038161003816100381610038161003816119909119895 minus 11990910038161003816100381610038161003816 (14)
where (1199091 119909119895 119909119872) is the proportion of passengerspassing through each gate obtained in an experiment 119909 is theaverage value
4 Simulation Experiment
In this section some experiments are carried out to showthe validity and stability of the model proposed in thispaper The techniques used to validate artificial pedestrianbehaviours can be identified as three main streams [49] thepedestrian dynamics descriptors such as the fundamentaldiagram the real data to validate the output of the modelsor simulation systems and the visual realism and the way ahumanobserver perceives in a simulationDue to the fact that
the main contributions of this paper focus on the mesoleveland macrolevel we verified our model with the latter twotechniques
41 Simulation of LRP Model As the core content of thelayered navigation algorithm the performance of the localroute planning model determines the practical value of thenavigation algorithm As mentioned in the part of introduc-tion there are three kinds of alternative methods of nodeselection behaviour They are based on utility probabilityand Logit model respectively Among each kind of methoda typical one with good performance is selected to comparewith our LRP model and the field data The comparedmethods were clearly stated in the literature and can bereproduced Compared with the above models the LRPmodel proposed in this paper makes further consideration ofpedestriansrsquo preferences the process and motivation to makechoice and the uncertainties underlying in estimation andselection
With the two typical layout scenarios of ticket gates thesimulation results are shown inFigure 14 In each experimentthe passenger size is the same as the survey It can beseen that the results of the LRP model in this paper havebetter performance than the other methods especially in thesymmetric scenario The simulation results can be evaluatedby the mean relative error (MRE) expressed as Equation (15)The errors of different methods are indicated in Table 4Withthe least values of MRE in both typical scenarios the LRPmodel in this research is the best method to describe thenode selection behaviour of ticket gates By the LRP model
14 Journal of Advanced Transportation
Table 4 The values of MRE by different algorithms
MRE This Research Shuaib M M 2018 [7] Li Y et al 2017 [16] Zheng X et al 2015 [11]symmetric layout 033 063 063 051asymmetric layout 029 038 043 035
Figure 15 A screenshot of the simulation process
we proposed the difference between the simulation resultsand the field data is reduced
MRE = 1119873119873sum119895=1
10038161003816100381610038161003816119909119895 minus 1199090119895 100381610038161003816100381610038161199090119895 (15)
where (1199091 119909119895 119909119873) is the proportion of passengers pass-ing through each gate obtained by simulation (11990901 1199090119895 1199090119873) is the proportion of the field data
42 Simulation of Layered Navigation Model In the layerednavigation algorithm of this paper the global path can bemodified by the local route planning in real time according tothe dynamic environment It performs well in simulating theself-optimizing path choice behaviour of passengers in realworld Firstly in order to illustrate the optimization functionof the LRP model in the layered navigation algorithm twoexperiments are carried out to simulate the movementsof passengers at the hall in a subway station In the firstexperiment agents are only guided by the global routeWhilein the other experiment the local route planning can beactivated according to dynamic environment
Take Qianmen Station on Line 8 of the Beijing Subwayas a case Four groups of passengers are loaded into eachexperiment Passengers could enter the station from theupper-left and the lower-right entrances Their arrival rate isassumed to follow a Poisson distribution with an average of50 persons per minute The passengers getting off a train willleave from the two exits located in the upper-right and thelower-left corner of the station Alighting passengers showa pulse distribution as the train arrives The trains wouldarrive at an interval of 2 minutes There are sixty alightingpassengers who would continue to reach the ticket gates inone minute
The experiments are carried out by the simulation tool wedeveloped According to the framework shown in Figure 3the static global routes for each passenger group are firstly
generated by an ldquoinitialization routerdquo module They areshown as the red polylines in Figure 15 Due to the similaractivity planning of pedestrians in a subway station it isreasonable to make the same global route for the pedestrianswhohave the sameODpair In particular the local route areasshown in Figure 5 should be set for the places needing localroute choice For example when a pedestrian gets to the ticketgate the local route plan will be activated Figure 15 shows ascreenshot after the simulation running for 54 seconds Thered ellipses represent agents
The level of service (LOS) is an important criterion toevaluate a metro station LOS is introduced by Fruin [50]to assess pedestrian facilities for the first time Based onthat Transit Capacity and Quality of Service Manual takesthe comfort and convenience of pedestrian into account andput forward a method to assessment the LOS as shown inTable 5 By the ldquocluster display moderdquo of our simulation toolthe LOS of local area can be marked in the map duringsimulation Figure 16 displays the screenshots of simulationIn Figure 16(a) passengers just walk along the global routeand do not consider local congestion This caused the crowd-edness at the entrance of the ticket gates and escalators Atthese places the LOS is always at level E In contrast whenthe agents can respond to dynamic surroundings by the localroute algorithm the congestions at bottleneck locations arerelieved effectively and the LOS is decreased in all local areasIn most cases the LOS is not above level C Level E onlyappears occasionally for a short time and could be adjustedby the self-organization of pedestrians quickly In conclusionthe model just based on the global route generates unrealisticbehaviour in the case of congestion However the modelincluding the LRP allows describing the redistribution of thepedestrians over the gates
In order to further demonstrate the effect of the hybridnavigation algorithm proposed in this paper we also simu-late the passenger movements in the above subway stationby commercial software VISSIM It is widely used in theresearch of pedestrian simulation The settings of building
Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

2 Journal of Advanced Transportation
Strategic Level
Static globalroute planning
Tactical Level
Dynamic localroute planning
Operational Level
To update pedestrianrsquos position at each time step
Modify
Target Points
Figure 1 The three levels of navigation algorithm
pointsThese target points are generated byGRP based on thestatic building environment and dynamically modified by theLRP with the changing surroundings
For the behaviour of multipath selection at tactical levelutility and probability are often used to solve this problemSome researches defined the utility as time [7] or a functionof some factors of the path such as distance excitement anddensity [8] Reference [9] defined the utility as a sum of therelative values of distance and density Paper [7] evaluatedthe exit choice by the maximum of the distance-based timeand density-based time In these studies the route with mostutility or least disutility will be definitely chosen Howeverthe choice of a pedestrian is not always sufficiently sensibleThey cannot always make accurate estimations and optimalchoices To reflect the randomness of path choice someresearches introduced probability into this field Reference[10] expressed the probability of selecting a certain path asa combination of the reliability probability and the cognitiveprobability Paper [11] evaluated the probability of exit choiceby a weighted sum of the distance-based probability andthe density-based probability The weights depend on thedegree of deviation of the alternative paths This modelwas also applied to the selection of ticket gates in subwaystations Reference [12] calculated the probability by anexponential function of distance and queue number Amongthe studies attempting to model route choice behaviourthe Logit model based on the utility of each route [13]has been proved as a popular and practical approach Themixed nested Logit model [14] multinomial Logit model[15] and other Logit models with complex forms have beenproposed to estimate the behaviour of multipath choiceReferences [16 17] constructed the utility of a path by a linearweighted sum of distance and time In some studies thetime factor was replaced by density [18] Paper [16] suggestedthat pedestriansrsquo preferences for the factors are related totheir speed Reference [19] proposed a node selection modelof ticket gates at metro stations and the linear weightingutility consists of multiple factors Paper [14] evaluated thecost by a sum of distance-based time and density-basedtime Unfortunately the development of probability andgeneralized utility in these studies are usually the resultsof mathematical matching with multiple factors and lackof practical physical significance This is not conducive toexplaining the fundamental motivation of pedestrians to
make choices and may lead to the deviation between thesimulation results and the actual situation Consequently thispaper aims to model the individual desires and interests ofmultipath choice to generate realistic community behaviours
In the literature the passenger simulation of multipathchoice behaviour aims to achieve two purposes One purposeis to explore the behaviour pattern of pedestrians in realityand then reproduce and estimate their selections Someexperiments have been made to explain the factors that affectpedestriansrsquo choices such as density distance visibility [20]and social influence [21 22] There are also data collectedby stated-choice investigation [23 24] and video [17] used toanalyze passengersrsquo selection behaviour Another purpose isto find out the optimal guidance scheme of the pedestriansto each path to get a utility balance or to get the leastevacuation time [25 26] This is often used in the layoutdesign and evacuation organization Paper [27] designed aclass of variable guide sign systems based on the dynamicbalance of each exit Obviously the former purpose is thefoundation of the latter Only by understanding the mech-anism of pedestrian selection behaviour the appropriateguidance management can be made Therefore this paperaims to reveal the mechanism of pedestrian choice behaviourin terms of psychology
In design and operation stages of metro system pedes-trian simulation has become a necessary low-cost andeffective method to improve facilities layout and passengerorganization It is of great significance to ensure the safetyand good performance in operation In order to achieve areliable simulation result the accuracy of simulation mod-els and parameters are particularly important At presentthere are some commercial software aiming to simulatepassenger behaviour such as Pathfinder Exodus and PTVViswalk These tools have different characteristics and theirown specific application range Although some standardizedverification and validation documents are published as areference these documents are directed at building environ-ment which is not necessarily used for subway scenes Thismotivated the development of dedicated models and moreaccurate knowledge of pedestrian movement at differentlocations and facilities in subway In particular the multipathchoice behaviour in subway stations at ticket gates [11 19]stairsescalator [28] and the waiting position on platform[29] is modeled in some researches Similarly the passengersrsquo
Journal of Advanced Transportation 3
motion during the check-in process in a high speed railwaystation is also studied in [30] However the whole process ofticket gate selection is not completely explored This paperattempts to make up this gap The behaviour of ticket gateselection is decomposed into several stages and embedded inthe navigation model
The multipath selection occurs when a pedestrian facesmultiple paths [26] exits and intermediate nodes Neverthe-less the selection of multiple intermediate nodes such as theticket gates in a subway station is different in some detailsfrom the other two kinds of multipath choices Specificallyin order to avoid interference the exits are usually dispersedin space Differently intermediate nodes such as servicewindows and ticket gates are usually centralized As a resultall the nodes are visible to pedestrians in geometric spaceDifferent from the exits the intermediate nodes are not theend of trip So rather than just focusing on the conditionbefore passing the nodes the condition after passing suchas the distance between the nodes to the next target pointshould also be taken into account Furthermore the nodeselection may involve some activities like queuing and ticketchecking Therefore as pedestrians would adopt differentbehaviours to deal with these three kinds of multipath situ-ations it is inappropriate to model them by the same modelFor example there are some unreasonable assumptions whenapplied the exit-choice model to the selection of ticket gates[11] For this reason some necessary adjustments are made tothe scalable LRPmethod proposed in this paper so as to applyit to the selection behaviour of ticket gates
Uncertainty always exists in system components andprocesses which are normally resulting from uncertain costin nature and deviations in subjective judgments Such avariety of uncertainties may become more compounded bycombinations of uncertain information presented inmultipleforms Previously a number of research works for uncertainmethods in traffic simulation were undertaken Reference[31] pointed out the effect of environmental uncertainty oncooperation of evacuation crowd and evacuation efficiencyPapers [32 33] optimized the evacuation organization whenthe demand uncertainty and capacity uncertainty were takeninto account Actually uncertainty also exists inmany aspectsof pedestrian path selection For instance since pedestrianshave the characteristics of rational irrationality and random-ness they do not always make the best choice [34] andmake the same decisions under the same circumstances Inaddition pedestrians have different preferences of choos-ing path Their perceptions of the distance and the socialinfluence factors are different [21] Reference [35] pointedout that the evacuees could be divided into the patient andthe impatient The patient evacuees try to avoid physicalcontacts but the impatient evacuees vie for the emptytarget cell by paying the effort Similarly [36] divided theminto the active and the conservative Reference [12] evenconsidered four types of window choice strategies It hasbeen proved that the uncertainties will affect the results ofpath selection but they have not been explicitly addressedin the existing literature In this paper the uncertaintyunderlying in route planning will be taken into accountin three ways the estimation of factors the randomness
of decision-making and the subjective individual prefer-ence
In this paper a three-level navigation algorithm is pro-posed to capture passenger movement in subway stationEspecially the improved pedestrian route planning modelbalances the certainty of global route planning at the strategiclevel and the flexibility of local route planning at the tacticallevel The local route planning model is developed basedon a passengerrsquos psychological motivation The uncertaintiesand preferences within the process of path selection arefully considered With this navigation algorithm the mostappropriate path will be activated according to real-timeenvironment The difference between simulation results andreal situation can be minimized
The study begins with the method of abstracting routeplanning network from realistic environment in Section 21and generating a collision-free global route in Section 22Following a novel local route algorithm is described inSection 23 The field data collected in actual subway stationsis given in Section 31Then an application to the selection ofticket gates is provided with some necessary adjustments inthe following parts of Section 3 Furthermore the advantagesof the proposed models are demonstrated with examples inSection 4 and last Section 5 concludes with a summary andan outlook for future work
2 Model
21 EnvironmentMapModeling Before route planning envi-ronment map should be established to mark the location ofpedestrian and obstaclesThrough expressing the obstacles asabstract geometric figures the walking area in real world canbe translated into perceivable environment information forpedestrians
The common methods to model environment are obsta-cles polygon barrier-free zone hybrid space and path dia-gram [37 38] Since pedestrians in subway station only needto recognize obstacles to avoid collision this paper adoptsobstacles polygon method to divide the station environmentinto two regions walking area and obstacle area Obstacleareas are abstracted as approximate polygons All the otherareas except obstacles are considered as walking areas on thebasis of continuum space model
22 Global Route Planning Model Based on Visibility GraphGlobal route planning is indispensable in a pedestrian sim-ulation It can optimize the layout of guidance facilitiesreduce calculating quantity and decrease errors caused bymanual operation especially in an environment with lots ofobstacles The main route planning algorithms are visibilitygraph free space and grids The complexity of free spacemethod increases with the amount of obstacles dramaticallyand this method cannot find the shortest path in any casesThe stored environment information of grids method is hugeand the suitable grid size is difficult to determine If gird sizeis too small the calculated amount will be too large whilethe shortest path may not be got with too big grid In theliterature most algorithms for global planning represent the
4 Journal of Advanced Transportation
Expanding obstacle
Real obstacle
pedestrian
Figure 2 Obstacle expanding illustration
connectivity of walkable space in the environment as a graphand perform search queries for each agent to determine acollision-free path We do not diverge from previous work inthis aspect and adopt visibility graph method to plan globalroute
According to the method of visibility graph the realisticenvironment is replaced by approximate polygon in propor-tion and the visible graph is composed by connecting all no-cross and unscreened lines By using Alowast algorithm [39] theshortest path between origin and destination can be found onthe visible graph which is the global navigation route
In global route all of intermediate points except originand destination are regarded as convex vertex of obstacles Intraditional visibility graphmethod a pedestrian is consideredas a point While in fact he occupies an area As a result apassenger overlaps with margin of obstacles when he walkson the global route [40] To avoid collision this papermakes acorrection to the intermediate points using half of pedestrianmaximum size as shown in Figure 2The virtual obstacles areused to calculate a global route
23 Local Route Planning Model Based on Estimated TravelTime Global route planning is used to find out the wholeroute from origin to destination If there are multiple routesthe shortest path in terms of Euclidean distance is searchedHowever when the pedestrian density is large it will causeunrealistic walking behaviour For example during pedes-trian passing a ticket gate at a subway station global routeplanning strategy will determine a fixed gate thereforepedestrians will wait in line at this gate and the other gateswill be left unused However according to observation andvideo analysis of pedestriansrsquo route choice behaviour at metrostations pedestrians will choose a farther unoccupied gate tosave travel time in practice The local route planning modelproposed in this paper is made in order to solve this problem
A pedestrian makes the route choice decision accordingto what has been seen in the surroundings and what has beenformulated in his or her mind Specifically environmentalfactors include path distance or travel time directness ofpath capacitywidth of exit visibility and service level [1641] The individual implicit factors include physical ability(walking speed) subjective preference familiarity with the
environment and following behaviour [42] From a review ofthe previous studies three factors namely the route lengthpassing time and density of pedestrian flow are identified tohave significant impacts on a pedestrianrsquos behaviour of routechoice [43]The route length is the primary factor that affectsroute choice behaviour and the crowdedness is a measureto reflect discomfort [44] What is more it is found that apedestrian tends to base his exit choice on time-dependentinformation rather than on time-independent information[9 45] Therefore the local route planning model proposedin this paper allows pedestrians choose a path accordingto the estimated passing time which is determined by thelength and the crowdedness of each local path shown as(1) and (2) The local route planning for each pedestrian isindependent and dynamic Namely which path will be theoptimal depends on the individual and the moment
119880119894j = 119881119894j + 120576119894j (1)
119881119894j = 120596119873119894j ∙ 119881119873119894j + 120596119871119894j ∙ 119881119871119894j (2)
where 119880119894j is the utility for pedestrian 119894 choosing pathj i=12 j=12 The random error 120576119894j is independentidentically distributed and subject to a Gumbel distribution119881119894j is a certain item indicating the estimated passing timeby pedestrian It consists of waiting time and walking time119881119873119894j 119881119871119894j is the estimated waiting time and the estimatedwalking time respectively 120596119879119894j and 120596119871119894j are the perceivedweights
In real-world situations passengers generally give aglance of the possible routes and make a rough estimation byhunch rather than by accurate calculations when making aroute choice Thus uncertainty of decision variables shouldbe introduced into the route choice model To an appropriatelevel the variability in time cost and uncertainty could helpldquoblurrdquo the agentsrsquo route choices In this way it can achievesimulation results that conform well to real situation
231 Passengersrsquo Perception of Time During the process ofa pedestrianrsquos journey on one hand he needs to walk for acertain distanceThe time spent on walking is called ldquowalkingtimerdquo On the other hand if there are congestions on the wayand the pedestrian need to queue for service he would haveto spend extra ldquowaiting timerdquo According to temperamentand time urgency pedestrians may have different values oftime (VOT) on ldquowalking timerdquo and ldquowaiting timerdquo It isobserved that there is a strong negative correlation betweenutility coefficients of distance and density meaning that anindividual who has a strong tendency to avoid congestion islikely to be more indifferent about walking for long distancesto reach a further less-congested path and vice versa [46]
232 Walking Time Pedestrian 119894 estimates the walking timeof the j-th local path as
119881119871119894119895 =sum1198711198981198941198951015840V119894
(3)
Journal of Advanced Transportation 5
V119894 is the desired walking speed of pedestrian i sum1198711198981198941198951015840 isthe estimated total length of local path 119895 If we divide path119895 into several segments the real length of segment 119898 is1198711198981198941198951198711198981198941198951015840 is the estimated length and can be calculate as (4)The estimated error is limited within 10 and 119896 is subject toa Gaussian distribution As a result 1198711198981198941198951015840 is also in a Gaussiandistribution with the average of 119871119898119894119895 and within range of[09sdot119871119898119894119895 11sdot119871119898119894119895]
1198711198981198941198951015840 = 119871119898119894119895 + 120576 (119871119898119894119895)120576 (119871119898119894119895) = 119896 ∙ 119871119898119894119895
119896 sim 119873 (0 0001) |119896| le 10(4)
It is worth noting that although the value of the estimatedlength has an error the order of local paths in length shouldnot be changed To ensure the right order of estimateddistances we should make a limit to the scope of estimatedlength Before estimating the length of segment 119898 for eachlocal path sort the actual distances from short to long Thencompare every two adjacent distances For 119871119898119894119901 lt 119871119898119894119902 if11 sdot 119871119898119894119901 gt 09 sdot 119871119898119894119902 the estimating range should be adjustedto
1198711198981198941199011015840 isin [[09 lowast 119871119898119894119901
(11 lowast 119871119898119894119901 + 09 lowast 119871119898119894119902)2 ]
]
1198711198981198941199021015840 isin [[(11 lowast 119871119898119894119901 + 09 lowast 119871119898119894119902)
2 11 lowast 119871119898119894119902]]
(5)
233Waiting Time Waiting time is estimated by the productof the estimated number of passengers in queue (1198731015840119894119895) and theaverage service time (1199050) as shown in (6)
119881119873119894119895 = 1198731015840119894119895 ∙ 1199050 (6)
Pedestrian 119894 would estimate the number of passengers queu-ing at local path 119895 as
1198731015840119894119895 = 119873119894119895 + 120576 (119873119894119895)
120576 (119873119894119895) =
0 119873119894 le 30 plusmn1 119873119894119895 isin [4 5]0 plusmn1 plusmn2 119873119894119895 ge 6
119875 120576 (119873119894119895) = 119883119901 = 13 (119883119901 = minus1 0 1)
119875 120576 (119873119894119895) = 119883119902 = 15 (119883119902 = minus2 minus1 0 1 2)
(7)
119873119894119895 is the actual number of queuing at local path 119895 whenpedestrian 119894makes decision 120576(119873119894119895) is estimation error and itwould enlarge as the queuing passenger population increases
Specifically in case of no more than three pedestriansqueuing pedestrian 119894 can identify the number accurately Ifthe number is greater than 3 the estimated error would obeya Discrete Uniform Distribution
234 Discrete Choice Model After the walking time and thewaiting time having been estimated the final piece of thepuzzle is how to decide which local path a passenger will passthrough As a problem of discrete choice we adopt the Logitmodel The probability of pedestrian 119894 choosing local path 119895is
119875119894119895 = exp (minus119881119894119895)sum119872119895=1 exp (minus119881119894119895)
119872sum119895=1
119875119894119895 = 1(8)
For a completely rational pedestrian he would choosethe most effective path to go through While in practice apedestrianrsquos decision is effected by some random factors suchas emotion and the pedestrians around him For this reason apedestrian will not accurately evaluate the route options andas a result the path with the smallest cost is not always chosen[47]Therefore the final decision is determined by a randomnumber according to the probabilities 119875119894119895
3 Model Application and Discussion
UtilizingMFCprovided byMicrosoftVisual Studio we devel-oped a pedestrian simulation tool to realize our navigationalgorithm Specifically to enable agents to autonomouslynavigate in complex spaces and crowded environment thetool combines the visibility graph at strategic level multistageroute choice scheme at tactical level and a variant of SocialForce Model at operational level The local route planningis realized by a target converter and local route settings Apedestrian can temporarily deviate from the global routetake reasonable detours to optimize his local route andreturn to global route after passing the local route regionAt the operational level a pedestrianrsquos movement towardsthe target point is driven by a resultant force which isaffected by the goalrsquos attraction barriers and other agentsThe framework of the layered navigation algorithm is shownin Figure 3
Thanks to the developed simulation tool the routechoices and crowd characteristics estimated by the navigationalgorithm can be favorably compared to the actual situationsin practice During simulation all the agent movements arerecorded to a database Then it can be analyzed to determinesomekey performancemetrics such as crowddensity journeytime and flow rates In addition the simulation can be playedback in real time (or faster) to provide a rich visual meansfor verifying and communicating Though the proposednavigation algorithm and simulation tool are applicable inmany scenarios the automatic fare gate in subway stations istaken as an example in this work
6 Journal of Advanced Transportation
Environment Map Modelling
Global Route Planning
To activate Local Route Planning and get the target point from the alternative local node selection
Pedestrian Setting
in a local path area
YesNo
Move to the target point driven by Social Force Model
Pedestrians generation on schedule
Get the target point from the global route
strategic level
tactical level
operational level
gender desired velocity OD preference
At time ti is Pedestrian m
Figure 3 The framework of the layered navigation algorithm
Walk direction Walk direction
OriginDestination
(a)
Walk Direction
Origin
Destination
(b)
Figure 4 The two simulation scenarios (a) symmetric layout and (b) asymmetric layout
31 Empirical Data and Simulation Settings According tofield survey in subway stations it is found that there aredifferent traffic lines because of the spatial layout of ticketgates Roughly the situation can be divided into two typicalscenarios ie the symmetry and the asymmetry scenarioAs shown in Figure 4 in the symmetry scenario passengersjust move forward and pass through the gate directly In theasymmetry scenario passengers need to move towards theticket gates firstly and then make a turn to pass through thegate In the following sections the gates are numbered as 1 2 5 in turn from top to bottom At the strategic level onlya fixed one of these gates could be counted as a part of globalroute But in practice a pedestrian would choose the optimalpath to replace the default one
To trigger the local route plan a virtual influence area isset in front of the ticket gate area where local route planningis needed as shown in Figure 5 When a pedestrian walksinto an influence zone the local route plan will be activatedto substitute global routeThe pedestrianrsquos destination will betemporarily reset to the local pathrsquos target point marked asD in Figure 5 which is normally the entrance of a stairway
to platform or a turning point of path Point O is the real-time location when pedestrians enter into the influence zoneIt represents the origin of local path Points Aj Bj are theentrance and the exit of gate 119895 The concentration zones areset to count how many pedestrians are queuing at each gateThe polygonal line OAjBjD describes local path 119895 It canbe divided into three segments in this scenario OAj AjBjand BjD Their lengths are 1198711119894119895 1198712119894119895 and 1198713119894119895 respectivelyHere 1198712119894119895 has the same length for each local path it can beignored in calculation Then the estimated walking time canbe simplified as
119881119871119894119895 =(11987111198941198951015840 + 11987131198941198951015840)
V119894(9)
In order to get reliable simulation results it is of greatimportance to assign the parameters of model with practicalvalues Generally in the design of critical facilities theperformance under peak passenger flow is a vital indicatorBased on field data obtained in peak-15-minute of morning
Journal of Advanced Transportation 7
A2
A3
A1
L1 L2 L3
Influence zoneConcentration zone Ticket gates
O
D
B2
B3
B1I
II
III
Figure 5 Illustration of local route algorithm
000
005
010
015
1 2 3 4 5service time (s)
perc
enta
ge (
)
000
004
008
012
016percentage
Figure 6 The service time of ticket gate based on field survey
and evening rush hour passengersrsquo arriving rate at the gatearea is subject to Poisson distribution (Equation (10)) Theaverage number of passengers is 40 per minute The desiredspeed ranges from 08ms to 15ms
119875 (119883 = 119896) = 120582119896119896 ∙ exp (minus120582) 119896 = 0 1 sdot sdot sdot (10)
where119883 is the arrival interval P is the probability and 120582 is aparameter
The value of service time 1199050 in (6) can be measured bythe interval between two passengers entering or leaving acertain ticket gate Some investigations are carried out insubway stations at morning peak on weekdaysThere is heavypassenger traffic during these periods and the passengersare always in a rush to go to work In the investigation werecorded the time interval between passengers leaving theend of the gate (point Bi in Figure 5) and the results areshown in Figure 6 It is observed that the service time for apedestrian obeys a positive skewness distribution It rangesfrom 08 s to 37 s and the mean value is 20 s So the value of1199050 in (6) can be regard as 2 seconds
The time for a passenger passing through the gate (frompoint Ai to Bi in Figure 5) is also observed in survey Theresults are shown in Figure 7 More than 80 passengers cango throughAiBi within 15 ssim 29 s and the average is 24 sThelength of a gate is 14m According to this the average speed
of a passenger passing through the gate can be obtainedAs shown in Figure 7(a) the distribution of passing speedpresents a normal distribution with an average of 065msInterestingly there is a long tail of the distribution of thepassing time (Figure 7(a)) and it disappears by transformingto speed (Figure 7(b))
In terms of time perception the passengers in a subwaystation can be summarized into three types The first one isadventurous They are active and more annoyed with time-waste of standing in a long queue than taking detour for afaster pass So their VOT of waiting time is greater Indeedcommuters in morning peak and passengers who are pressedfor time to catch a train or a flight are usually adventurousIn addition passengers who have higher requirements for acomfortable walking environment are more willing to choosea far path to avoid crowd they are also adventurous Thesecond type is the conservative such as the elderly Becauseof their difficulty in moving and other reasons they prefera path with shorter walking distance and without bypass Intheir views waiting is much more convenient than walkingaround In this case the VOT of walking time is 12 and ofwaiting time is 08 [48] For some mild passengers thereis no preference of waiting and walking and both couldbe interpreted as ldquonormalrdquo time Their perceived time isequivalent to the real time and the VOT is 1 The perceivedweights in (2) can be valued as (11) These values are alsoreferred to simulation experiments It is the best scheme tokeep the simulation results consistent with actual situation
120596119873119894 = 12120596119871119894 = 08
if temperament is adventurous
120596119873119894 = 08120596119871119894 = 12
if temperament is conserved
120596119873119894 = 10120596119871119894 = 10
if temperament is mild
(11)
8 Journal of Advanced Transportation
000
005
010
015
020
025
2 4 6passing time (s)
perc
enta
ge (
)
000
005
010
015
020
percent
(a)
00
01
02
025 050 075 100passing speed (ms)
perc
enta
ge (
)
005010015020025
percent
(b)
Figure 7 (a)The time of passing through a gate based on field survey and (b) the calculated passing speed
000
005
010
015
0 2 4 6
feeding time (s)
perc
enta
ge (
)
000
005
010
percent
Figure 8 The feeding time based on field survey
To pass through the ticket gate a special activity must beperformedmdashto check the card Due to individual habit andthe familiarity with subway the card feeding time of eachpassenger would be different In most cases scanning timeranges from 05 s to 20 s and the average value is 11s asshown in Figure 8 Occasionally some greater feeding timecan be observed because of a failure to prepare the smart cardin advance and improper operation The maximum value weobserved during rush hour is 738 s
The movement of passengers in subway stations and thesituations of passing through the ticket gates are also recordedin field survey the details will be mentioned in the followingsections
32 Multistage Route Choice Scheme Local path selection isa dynamic process The volume of passengers at each gateis time-varying and the utility value of each local path isalso changing When a pedestrian realizes that the utilityvalue of his original choice obviously increased or thatanother path is obviously superior to the original one hewill reevaluate the utility of each path and may change hischoice To solve the problem of reselection some studiesupdated the selection choice at each time step [8] Howeverthis leads to a pingndashpong effect [9] This drawback can be
corrected by using inertial system and relaxation processesWith the inertial system a new selection will be adoptedonly when it gains a certain increment in contrast to the oldselection [7]With relaxation processes the selection updatesin a given time interval such as 10 seconds [14 16] Thesemethods can achieve good results under certain conditionsHowever in a subway system it is difficult to determine anappropriate threshold for the inertial system and a time inter-val of reselection for the time-based relaxation processesFortunately according to field studies the selection processof passing through ticket gates can be abstracted into threestages (Figure 9) Firstly a pedestrian generally begins toconsider which gate is suitable and make a decision in frontof the gates with a distance of 30m Then he moves towardsthe target gate and always pays attention to the surroundingsIn most cases if necessary a selection change would be madein front of the gates with a distance of 17m Next when he isclose to the gate and prepares to check the card in one case hemay change his choice for the third time The case is that thepassenger in front of him occupancies the gate for a long timeand the next gate is unoccupied The location for the thirdchoice is set in front of the gates at a distance of 10m
Unlike the first choice as the pedestrian is considerableclose to the gates when he makes the second-time and thethird-time route choices he would pay more attention tothe distance between his current position and the gate (ieOAj) So the estimated walking time can be simplified to (12)What is more at that time the estimations on distance andpopulation size are relatively accurate He would have moreconfidence in his judgment and will choose the fastest pathas indicated in (13)
119881119871119894119895 =11987111198941198951015840V119894
(12)
Optimal local path for ped 119894= 119871119900119888119886119897 119875119886119905ℎ119895 | 119881119894119895 = min (1198811198941 1198811198942 sdot sdot sdot 119881119894119872)
(13)
As a passenger arrives at the gate hewill stop to press cardand then pass through When a passenger is scanning card
Journal of Advanced Transportation 9
10 m
17m
3 0m
Walk on Local Path
Walk on Global Path
Back to Global Path
First Choice Second Choice
Third Choice
Press Card
025m
Figure 9 The locations to make the multistage route choices
Table 1 Algorithm of local route planning
Input(a) A set of local path J(b) Preference of pedestrian i 120596119873119894119895 and 120596119871119894119895(c) Current speed V119894 and position (xi yi) of pedestrian i at time t
Output A suitable local path for pedestrian i at time t1 For each local path j in J do
2 estimate total walking distance sum1198711198981198941198951015840 by Equations ((4) (5)) (when pedestrian iis closed to the gatessum1198711198981198941198951015840 can be simplified to 11987111198941198951015840 in Equation (12))
3 calculate walking time 119881119871119894119895 by Equation (3)4 estimate the number of passengers queueing1198731015840119894119895 at local path j by Equation (7)5 calculate waiting time 119881119873119894119895 by Equation (6)6 calculate the estimated passing time of path j by Equation (2)7 End for8 If pedestrian i is closed enough to the ticket gates then
9 pass through the local path with minimum estimated passing time by Equation(13)
10 else calculate the probability 119875119894119895 of pedestrian i choose local path j by Equation (8)11 choose a suitable local path for pedestrian i based on 119875119894119895 and a random number12 End if
the front edge of his body is almost tangent to the entrance ofthe gate So the position of pressing card is set 025m aheadeach gate as shown in Figure 9
33 Results of Local Route Choice In order to test theproposed LRP model (the algorithm is summarized inTable 1) two experiments are carried out with the typicalscenarios (shown in Figure 4) The ratio of pedestrians withdifferent preferences is assumed as 111 The simulation lastsfor 5 minutes with 200 passengers In addition the actual
passenger flows of each gate in the two scenarios are alsoobserved in Beijing Subway at peak hours As shown inFigure 10 it indicates similar passenger distributions at eachgate in field investigations and simulation results Specificallyin the symmetric scenario most passengers go through thethree gates in the middle which are the shortest paths Whilethere is less passenger flow of the farthest gates 1 and 5 allthe 200 passengers continued to pass through the gates from12 s to 342 s and the average service level of the gates is36 personmin Similarly in the asymmetric scenario the
10 Journal of Advanced Transportation
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
Figure 10 Comparison of simulation results and survey data under symmetric layout (left) and asymmetric layout (right)
position 2
origin
position 1 position 3
destination
position 4
Waiting time(t2)
Pre-passing walking time(t1)
Post-passing walking time(t3)
Total time (t)
gate 1
gate 2
gate 3
gate 4
gate 505 m
Figure 11 Measurement positions and travel time
gates with the shortest distances (gate 4 and gate 5) have thelargest passenger flows accounting for 70 Due to the longdistance the number of passengers passed through gate 1 andgate 2 is small especially gate 1 only 4 persons passed Allpassengers passed through the gates within 10 s to 343 s
As shown in Figure 10 in the asymmetric scenario thepassenger flow of each gate exhibits a more nonuniformdistribution To gain an insight into the distribution ofpassengers with different preference the simulation results ofthe asymmetric scenario is a good case to illustrate this issueAs shown in Table 2 the distribution of the adventurous isobviously different from the others For the conserved andthe mild more than 40 percentage of the pedestrian volumepass through the nearest gate 5 and the total number ofpedestrians passing through from the two nearest paths (gate4 and 5) accounts for more than 70 In contrast most ofthe adventurous pass through gate 3 and 4 rather than thenearest gate 5 This is thanks to the fact that the nearest gate5 is always occupied by the conserved and the mild As a
result in order to avoid congestion the adventurous have topass through the farther gates In addition there are a fewof adventurous pedestrians pass through gate 1 the farthestpath However the conserved and the mild almost neverchoose gate 1 Therefore in the condition of a large numberof passengers passing through ticket gates the adventurouswould make an important contribution to the balance offacilities utilization
34 Passing Time To clarify the effects of passenger prefer-ence on local route decision-making we set four positions torecord the travel time for each pedestrian during simulationAs shown in Figure 11 the first position is the origin pointThe second is 05-metre ahead to the gatesThe third positionis at the front edge of gates where passengers are just walkinginto the gates The last position is the destination of pathThen four periods of time could be defined Specificallywaiting time (1199052) is the period for a passenger walking fromposition 2 to position 3 It includes the time of walking
Journal of Advanced Transportation 11
Table 2 Results of local route choice for different passengers
Temperament gate1 gate 2 gate 3 gate 4 gate 5 Totaladventurous 4 12 28 31 24 100 67 pconserved 1 9 17 31 41 100 70 pmild 0 5 21 32 43 100 63 pTotal 2 9 22 32 36 100 200 p
150
155
160
165
adventurous conserved mild
Tota
l Tim
e (s)
180
185
190
195
200
adventurous conserved mild
Wai
ting
Tim
e (s)
70
73
76
79
adventurous conserved mild
Pre-
pass
ing
Wal
king
Tim
e (s)
55
60
65
70
adventurous conserved mild
Post-
pass
ing
Wal
king
Tim
e (s)
Figure 12 The passing times for different passengers
scanning card and queuing up ldquoPrepassing walking timerdquo(1199051) is the time taken to reach position 2 from the originand ldquopostpassing walking timerdquo (1199053) is the time spent fromposition 3 to the destinationThe total time spent in thewholejourney from origin to destination is defined as t
As the expected speed and scan-card time of differentpedestrians follow the same distribution the walking dis-tances and queuing time of pedestrians can be compared
using the four time periods In the same way take theresults of the asymmetric scenario for example As shownin Figure 12 the conserved pedestrians who prefer to wait ata congested gate spend more time on waiting and less timeon walking And for the pedestrians avoiding congestion theresults are completely the opposite For the mild the timethey spend and the distance they traveled at each stage arealways at the middle level In particular the adventurous
12 Journal of Advanced Transportation
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
Figure 13 Four simulation cases with different choice preferences under symmetric layout (left) and asymmetric layout (right)
Table 3 The values of MD for different passengers
MD adventurous conserved mild Totalsymmetric layout 40 56 30 36asymmetric layout 28 48 36 28
passengers have the longest walking time (786 s beforepassing and 673 s after passing) and the shortest waitingtime (186 s) This is in consistent with the hypothesis thatthey prefer to farther path to avoid queuing On the contrarythe conserved passengers have the longest waiting time (194s) but get to the destination faster by walking the shortestdistance (total time is 1526 s) Although the adventurouswait 008s less time than the conserved they walk for 127smore than the conserved As a consequence the adventurousspend 090 s on the whole journey more than the conservedon average This is a kind of ldquofast is slowrdquo phenomenonWith the given population size and passengerrsquos compositionfrom an individualrsquos perspective it seems that waiting andpassing through the near paths is the most time-savingstrategy
35 Individual Preference The three kinds of personalityin this paper actually map different choice preferences Inorder to further investigate the differences among themfour simulation cases are established In the first three casesall pedestrians have the same character In this way theperformance of a kind of passengers can be revealed solelywithout interference from other types of passengers As acomparison each pedestrian in Case 4 would have one ofthe three choice preferences randomly while the passenger
volume stays the same Tohighlight the impact of preferencesthe passenger load in the four cases is triple as much asthe normal situation The passenger flow passed througheach gate is shown in Figure 13 In the four cases of thesymmetric scenario there are small passenger flow of the twomarginal gates (gate 1 and 5) Meanwhile the adventurousdisplay a better balance at the three middle gates and themildachieve a suboptimal balance whereas the passenger size ofthe conserved pass through the middle gate 3 is significantlyhigher than other cases In the asymmetric scenario Case 2(only the conserved) and Case 3 (only the mild) have similarresults the shorter distance a path is the more passengerspass through However Case 1 (only the adventurous) has adifferent performance the passenger population of each gateis much better balanced Except for the farthest gate 1 theproportions of the adventurous pass through each gate arealmost the same
To evaluate the passenger distribution the mean devi-ation (MD Equation (14)) is introduced as a coefficient ofuniformity The evaluation results are shown in Table 3 Alarger value of MDmeans a more uneven distribution of pas-sengers at each gate and a poorer utilization of the facilitiesFor instance in the symmetric scenario there is a seriouslynonuniform distribution of the conserved passengers withthe biggest value ofMD (56) In the asymmetric scenario theMD value of the adventurous is the smallest and the facilities
Journal of Advanced Transportation 13
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
Prop
ortio
n
Prop
ortio
n
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
Figure 14 The survey data and simulation results under symmetric layout (left) and asymmetric layout (right)
are made best use in this case Although the distributions ofthe mild and the conserved are similar the mild present abetter balance than the conserved Actually the MD values ofthe conserved are the biggest in the both scenarios and theyare not conducive to make full utilization of facilities
Interestingly with mixed choice preferences Case 4 ismore in line with the practical condition Both in thesymmetric and asymmetric scenarios Case 4 could achievewell balanced distributions Furthermore by a comparisonwith the simulation results in Section 33 (Figure 10) itcan be found that with the increased population size thedistribution of passenger flow of each gate is more balancedand as a result the facility utilization is improved
MD = 1119873119872sum119895=1
10038161003816100381610038161003816119909119895 minus 11990910038161003816100381610038161003816 (14)
where (1199091 119909119895 119909119872) is the proportion of passengerspassing through each gate obtained in an experiment 119909 is theaverage value
4 Simulation Experiment
In this section some experiments are carried out to showthe validity and stability of the model proposed in thispaper The techniques used to validate artificial pedestrianbehaviours can be identified as three main streams [49] thepedestrian dynamics descriptors such as the fundamentaldiagram the real data to validate the output of the modelsor simulation systems and the visual realism and the way ahumanobserver perceives in a simulationDue to the fact that
the main contributions of this paper focus on the mesoleveland macrolevel we verified our model with the latter twotechniques
41 Simulation of LRP Model As the core content of thelayered navigation algorithm the performance of the localroute planning model determines the practical value of thenavigation algorithm As mentioned in the part of introduc-tion there are three kinds of alternative methods of nodeselection behaviour They are based on utility probabilityand Logit model respectively Among each kind of methoda typical one with good performance is selected to comparewith our LRP model and the field data The comparedmethods were clearly stated in the literature and can bereproduced Compared with the above models the LRPmodel proposed in this paper makes further consideration ofpedestriansrsquo preferences the process and motivation to makechoice and the uncertainties underlying in estimation andselection
With the two typical layout scenarios of ticket gates thesimulation results are shown inFigure 14 In each experimentthe passenger size is the same as the survey It can beseen that the results of the LRP model in this paper havebetter performance than the other methods especially in thesymmetric scenario The simulation results can be evaluatedby the mean relative error (MRE) expressed as Equation (15)The errors of different methods are indicated in Table 4Withthe least values of MRE in both typical scenarios the LRPmodel in this research is the best method to describe thenode selection behaviour of ticket gates By the LRP model
14 Journal of Advanced Transportation
Table 4 The values of MRE by different algorithms
MRE This Research Shuaib M M 2018 [7] Li Y et al 2017 [16] Zheng X et al 2015 [11]symmetric layout 033 063 063 051asymmetric layout 029 038 043 035
Figure 15 A screenshot of the simulation process
we proposed the difference between the simulation resultsand the field data is reduced
MRE = 1119873119873sum119895=1
10038161003816100381610038161003816119909119895 minus 1199090119895 100381610038161003816100381610038161199090119895 (15)
where (1199091 119909119895 119909119873) is the proportion of passengers pass-ing through each gate obtained by simulation (11990901 1199090119895 1199090119873) is the proportion of the field data
42 Simulation of Layered Navigation Model In the layerednavigation algorithm of this paper the global path can bemodified by the local route planning in real time according tothe dynamic environment It performs well in simulating theself-optimizing path choice behaviour of passengers in realworld Firstly in order to illustrate the optimization functionof the LRP model in the layered navigation algorithm twoexperiments are carried out to simulate the movementsof passengers at the hall in a subway station In the firstexperiment agents are only guided by the global routeWhilein the other experiment the local route planning can beactivated according to dynamic environment
Take Qianmen Station on Line 8 of the Beijing Subwayas a case Four groups of passengers are loaded into eachexperiment Passengers could enter the station from theupper-left and the lower-right entrances Their arrival rate isassumed to follow a Poisson distribution with an average of50 persons per minute The passengers getting off a train willleave from the two exits located in the upper-right and thelower-left corner of the station Alighting passengers showa pulse distribution as the train arrives The trains wouldarrive at an interval of 2 minutes There are sixty alightingpassengers who would continue to reach the ticket gates inone minute
The experiments are carried out by the simulation tool wedeveloped According to the framework shown in Figure 3the static global routes for each passenger group are firstly
generated by an ldquoinitialization routerdquo module They areshown as the red polylines in Figure 15 Due to the similaractivity planning of pedestrians in a subway station it isreasonable to make the same global route for the pedestrianswhohave the sameODpair In particular the local route areasshown in Figure 5 should be set for the places needing localroute choice For example when a pedestrian gets to the ticketgate the local route plan will be activated Figure 15 shows ascreenshot after the simulation running for 54 seconds Thered ellipses represent agents
The level of service (LOS) is an important criterion toevaluate a metro station LOS is introduced by Fruin [50]to assess pedestrian facilities for the first time Based onthat Transit Capacity and Quality of Service Manual takesthe comfort and convenience of pedestrian into account andput forward a method to assessment the LOS as shown inTable 5 By the ldquocluster display moderdquo of our simulation toolthe LOS of local area can be marked in the map duringsimulation Figure 16 displays the screenshots of simulationIn Figure 16(a) passengers just walk along the global routeand do not consider local congestion This caused the crowd-edness at the entrance of the ticket gates and escalators Atthese places the LOS is always at level E In contrast whenthe agents can respond to dynamic surroundings by the localroute algorithm the congestions at bottleneck locations arerelieved effectively and the LOS is decreased in all local areasIn most cases the LOS is not above level C Level E onlyappears occasionally for a short time and could be adjustedby the self-organization of pedestrians quickly In conclusionthe model just based on the global route generates unrealisticbehaviour in the case of congestion However the modelincluding the LRP allows describing the redistribution of thepedestrians over the gates
In order to further demonstrate the effect of the hybridnavigation algorithm proposed in this paper we also simu-late the passenger movements in the above subway stationby commercial software VISSIM It is widely used in theresearch of pedestrian simulation The settings of building
Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 3
motion during the check-in process in a high speed railwaystation is also studied in [30] However the whole process ofticket gate selection is not completely explored This paperattempts to make up this gap The behaviour of ticket gateselection is decomposed into several stages and embedded inthe navigation model
The multipath selection occurs when a pedestrian facesmultiple paths [26] exits and intermediate nodes Neverthe-less the selection of multiple intermediate nodes such as theticket gates in a subway station is different in some detailsfrom the other two kinds of multipath choices Specificallyin order to avoid interference the exits are usually dispersedin space Differently intermediate nodes such as servicewindows and ticket gates are usually centralized As a resultall the nodes are visible to pedestrians in geometric spaceDifferent from the exits the intermediate nodes are not theend of trip So rather than just focusing on the conditionbefore passing the nodes the condition after passing suchas the distance between the nodes to the next target pointshould also be taken into account Furthermore the nodeselection may involve some activities like queuing and ticketchecking Therefore as pedestrians would adopt differentbehaviours to deal with these three kinds of multipath situ-ations it is inappropriate to model them by the same modelFor example there are some unreasonable assumptions whenapplied the exit-choice model to the selection of ticket gates[11] For this reason some necessary adjustments are made tothe scalable LRPmethod proposed in this paper so as to applyit to the selection behaviour of ticket gates
Uncertainty always exists in system components andprocesses which are normally resulting from uncertain costin nature and deviations in subjective judgments Such avariety of uncertainties may become more compounded bycombinations of uncertain information presented inmultipleforms Previously a number of research works for uncertainmethods in traffic simulation were undertaken Reference[31] pointed out the effect of environmental uncertainty oncooperation of evacuation crowd and evacuation efficiencyPapers [32 33] optimized the evacuation organization whenthe demand uncertainty and capacity uncertainty were takeninto account Actually uncertainty also exists inmany aspectsof pedestrian path selection For instance since pedestrianshave the characteristics of rational irrationality and random-ness they do not always make the best choice [34] andmake the same decisions under the same circumstances Inaddition pedestrians have different preferences of choos-ing path Their perceptions of the distance and the socialinfluence factors are different [21] Reference [35] pointedout that the evacuees could be divided into the patient andthe impatient The patient evacuees try to avoid physicalcontacts but the impatient evacuees vie for the emptytarget cell by paying the effort Similarly [36] divided theminto the active and the conservative Reference [12] evenconsidered four types of window choice strategies It hasbeen proved that the uncertainties will affect the results ofpath selection but they have not been explicitly addressedin the existing literature In this paper the uncertaintyunderlying in route planning will be taken into accountin three ways the estimation of factors the randomness
of decision-making and the subjective individual prefer-ence
In this paper a three-level navigation algorithm is pro-posed to capture passenger movement in subway stationEspecially the improved pedestrian route planning modelbalances the certainty of global route planning at the strategiclevel and the flexibility of local route planning at the tacticallevel The local route planning model is developed basedon a passengerrsquos psychological motivation The uncertaintiesand preferences within the process of path selection arefully considered With this navigation algorithm the mostappropriate path will be activated according to real-timeenvironment The difference between simulation results andreal situation can be minimized
The study begins with the method of abstracting routeplanning network from realistic environment in Section 21and generating a collision-free global route in Section 22Following a novel local route algorithm is described inSection 23 The field data collected in actual subway stationsis given in Section 31Then an application to the selection ofticket gates is provided with some necessary adjustments inthe following parts of Section 3 Furthermore the advantagesof the proposed models are demonstrated with examples inSection 4 and last Section 5 concludes with a summary andan outlook for future work
2 Model
21 EnvironmentMapModeling Before route planning envi-ronment map should be established to mark the location ofpedestrian and obstaclesThrough expressing the obstacles asabstract geometric figures the walking area in real world canbe translated into perceivable environment information forpedestrians
The common methods to model environment are obsta-cles polygon barrier-free zone hybrid space and path dia-gram [37 38] Since pedestrians in subway station only needto recognize obstacles to avoid collision this paper adoptsobstacles polygon method to divide the station environmentinto two regions walking area and obstacle area Obstacleareas are abstracted as approximate polygons All the otherareas except obstacles are considered as walking areas on thebasis of continuum space model
22 Global Route Planning Model Based on Visibility GraphGlobal route planning is indispensable in a pedestrian sim-ulation It can optimize the layout of guidance facilitiesreduce calculating quantity and decrease errors caused bymanual operation especially in an environment with lots ofobstacles The main route planning algorithms are visibilitygraph free space and grids The complexity of free spacemethod increases with the amount of obstacles dramaticallyand this method cannot find the shortest path in any casesThe stored environment information of grids method is hugeand the suitable grid size is difficult to determine If gird sizeis too small the calculated amount will be too large whilethe shortest path may not be got with too big grid In theliterature most algorithms for global planning represent the
4 Journal of Advanced Transportation
Expanding obstacle
Real obstacle
pedestrian
Figure 2 Obstacle expanding illustration
connectivity of walkable space in the environment as a graphand perform search queries for each agent to determine acollision-free path We do not diverge from previous work inthis aspect and adopt visibility graph method to plan globalroute
According to the method of visibility graph the realisticenvironment is replaced by approximate polygon in propor-tion and the visible graph is composed by connecting all no-cross and unscreened lines By using Alowast algorithm [39] theshortest path between origin and destination can be found onthe visible graph which is the global navigation route
In global route all of intermediate points except originand destination are regarded as convex vertex of obstacles Intraditional visibility graphmethod a pedestrian is consideredas a point While in fact he occupies an area As a result apassenger overlaps with margin of obstacles when he walkson the global route [40] To avoid collision this papermakes acorrection to the intermediate points using half of pedestrianmaximum size as shown in Figure 2The virtual obstacles areused to calculate a global route
23 Local Route Planning Model Based on Estimated TravelTime Global route planning is used to find out the wholeroute from origin to destination If there are multiple routesthe shortest path in terms of Euclidean distance is searchedHowever when the pedestrian density is large it will causeunrealistic walking behaviour For example during pedes-trian passing a ticket gate at a subway station global routeplanning strategy will determine a fixed gate thereforepedestrians will wait in line at this gate and the other gateswill be left unused However according to observation andvideo analysis of pedestriansrsquo route choice behaviour at metrostations pedestrians will choose a farther unoccupied gate tosave travel time in practice The local route planning modelproposed in this paper is made in order to solve this problem
A pedestrian makes the route choice decision accordingto what has been seen in the surroundings and what has beenformulated in his or her mind Specifically environmentalfactors include path distance or travel time directness ofpath capacitywidth of exit visibility and service level [1641] The individual implicit factors include physical ability(walking speed) subjective preference familiarity with the
environment and following behaviour [42] From a review ofthe previous studies three factors namely the route lengthpassing time and density of pedestrian flow are identified tohave significant impacts on a pedestrianrsquos behaviour of routechoice [43]The route length is the primary factor that affectsroute choice behaviour and the crowdedness is a measureto reflect discomfort [44] What is more it is found that apedestrian tends to base his exit choice on time-dependentinformation rather than on time-independent information[9 45] Therefore the local route planning model proposedin this paper allows pedestrians choose a path accordingto the estimated passing time which is determined by thelength and the crowdedness of each local path shown as(1) and (2) The local route planning for each pedestrian isindependent and dynamic Namely which path will be theoptimal depends on the individual and the moment
119880119894j = 119881119894j + 120576119894j (1)
119881119894j = 120596119873119894j ∙ 119881119873119894j + 120596119871119894j ∙ 119881119871119894j (2)
where 119880119894j is the utility for pedestrian 119894 choosing pathj i=12 j=12 The random error 120576119894j is independentidentically distributed and subject to a Gumbel distribution119881119894j is a certain item indicating the estimated passing timeby pedestrian It consists of waiting time and walking time119881119873119894j 119881119871119894j is the estimated waiting time and the estimatedwalking time respectively 120596119879119894j and 120596119871119894j are the perceivedweights
In real-world situations passengers generally give aglance of the possible routes and make a rough estimation byhunch rather than by accurate calculations when making aroute choice Thus uncertainty of decision variables shouldbe introduced into the route choice model To an appropriatelevel the variability in time cost and uncertainty could helpldquoblurrdquo the agentsrsquo route choices In this way it can achievesimulation results that conform well to real situation
231 Passengersrsquo Perception of Time During the process ofa pedestrianrsquos journey on one hand he needs to walk for acertain distanceThe time spent on walking is called ldquowalkingtimerdquo On the other hand if there are congestions on the wayand the pedestrian need to queue for service he would haveto spend extra ldquowaiting timerdquo According to temperamentand time urgency pedestrians may have different values oftime (VOT) on ldquowalking timerdquo and ldquowaiting timerdquo It isobserved that there is a strong negative correlation betweenutility coefficients of distance and density meaning that anindividual who has a strong tendency to avoid congestion islikely to be more indifferent about walking for long distancesto reach a further less-congested path and vice versa [46]
232 Walking Time Pedestrian 119894 estimates the walking timeof the j-th local path as
119881119871119894119895 =sum1198711198981198941198951015840V119894
(3)
Journal of Advanced Transportation 5
V119894 is the desired walking speed of pedestrian i sum1198711198981198941198951015840 isthe estimated total length of local path 119895 If we divide path119895 into several segments the real length of segment 119898 is1198711198981198941198951198711198981198941198951015840 is the estimated length and can be calculate as (4)The estimated error is limited within 10 and 119896 is subject toa Gaussian distribution As a result 1198711198981198941198951015840 is also in a Gaussiandistribution with the average of 119871119898119894119895 and within range of[09sdot119871119898119894119895 11sdot119871119898119894119895]
1198711198981198941198951015840 = 119871119898119894119895 + 120576 (119871119898119894119895)120576 (119871119898119894119895) = 119896 ∙ 119871119898119894119895
119896 sim 119873 (0 0001) |119896| le 10(4)
It is worth noting that although the value of the estimatedlength has an error the order of local paths in length shouldnot be changed To ensure the right order of estimateddistances we should make a limit to the scope of estimatedlength Before estimating the length of segment 119898 for eachlocal path sort the actual distances from short to long Thencompare every two adjacent distances For 119871119898119894119901 lt 119871119898119894119902 if11 sdot 119871119898119894119901 gt 09 sdot 119871119898119894119902 the estimating range should be adjustedto
1198711198981198941199011015840 isin [[09 lowast 119871119898119894119901
(11 lowast 119871119898119894119901 + 09 lowast 119871119898119894119902)2 ]
]
1198711198981198941199021015840 isin [[(11 lowast 119871119898119894119901 + 09 lowast 119871119898119894119902)
2 11 lowast 119871119898119894119902]]
(5)
233Waiting Time Waiting time is estimated by the productof the estimated number of passengers in queue (1198731015840119894119895) and theaverage service time (1199050) as shown in (6)
119881119873119894119895 = 1198731015840119894119895 ∙ 1199050 (6)
Pedestrian 119894 would estimate the number of passengers queu-ing at local path 119895 as
1198731015840119894119895 = 119873119894119895 + 120576 (119873119894119895)
120576 (119873119894119895) =
0 119873119894 le 30 plusmn1 119873119894119895 isin [4 5]0 plusmn1 plusmn2 119873119894119895 ge 6
119875 120576 (119873119894119895) = 119883119901 = 13 (119883119901 = minus1 0 1)
119875 120576 (119873119894119895) = 119883119902 = 15 (119883119902 = minus2 minus1 0 1 2)
(7)
119873119894119895 is the actual number of queuing at local path 119895 whenpedestrian 119894makes decision 120576(119873119894119895) is estimation error and itwould enlarge as the queuing passenger population increases
Specifically in case of no more than three pedestriansqueuing pedestrian 119894 can identify the number accurately Ifthe number is greater than 3 the estimated error would obeya Discrete Uniform Distribution
234 Discrete Choice Model After the walking time and thewaiting time having been estimated the final piece of thepuzzle is how to decide which local path a passenger will passthrough As a problem of discrete choice we adopt the Logitmodel The probability of pedestrian 119894 choosing local path 119895is
119875119894119895 = exp (minus119881119894119895)sum119872119895=1 exp (minus119881119894119895)
119872sum119895=1
119875119894119895 = 1(8)
For a completely rational pedestrian he would choosethe most effective path to go through While in practice apedestrianrsquos decision is effected by some random factors suchas emotion and the pedestrians around him For this reason apedestrian will not accurately evaluate the route options andas a result the path with the smallest cost is not always chosen[47]Therefore the final decision is determined by a randomnumber according to the probabilities 119875119894119895
3 Model Application and Discussion
UtilizingMFCprovided byMicrosoftVisual Studio we devel-oped a pedestrian simulation tool to realize our navigationalgorithm Specifically to enable agents to autonomouslynavigate in complex spaces and crowded environment thetool combines the visibility graph at strategic level multistageroute choice scheme at tactical level and a variant of SocialForce Model at operational level The local route planningis realized by a target converter and local route settings Apedestrian can temporarily deviate from the global routetake reasonable detours to optimize his local route andreturn to global route after passing the local route regionAt the operational level a pedestrianrsquos movement towardsthe target point is driven by a resultant force which isaffected by the goalrsquos attraction barriers and other agentsThe framework of the layered navigation algorithm is shownin Figure 3
Thanks to the developed simulation tool the routechoices and crowd characteristics estimated by the navigationalgorithm can be favorably compared to the actual situationsin practice During simulation all the agent movements arerecorded to a database Then it can be analyzed to determinesomekey performancemetrics such as crowddensity journeytime and flow rates In addition the simulation can be playedback in real time (or faster) to provide a rich visual meansfor verifying and communicating Though the proposednavigation algorithm and simulation tool are applicable inmany scenarios the automatic fare gate in subway stations istaken as an example in this work
6 Journal of Advanced Transportation
Environment Map Modelling
Global Route Planning
To activate Local Route Planning and get the target point from the alternative local node selection
Pedestrian Setting
in a local path area
YesNo
Move to the target point driven by Social Force Model
Pedestrians generation on schedule
Get the target point from the global route
strategic level
tactical level
operational level
gender desired velocity OD preference
At time ti is Pedestrian m
Figure 3 The framework of the layered navigation algorithm
Walk direction Walk direction
OriginDestination
(a)
Walk Direction
Origin
Destination
(b)
Figure 4 The two simulation scenarios (a) symmetric layout and (b) asymmetric layout
31 Empirical Data and Simulation Settings According tofield survey in subway stations it is found that there aredifferent traffic lines because of the spatial layout of ticketgates Roughly the situation can be divided into two typicalscenarios ie the symmetry and the asymmetry scenarioAs shown in Figure 4 in the symmetry scenario passengersjust move forward and pass through the gate directly In theasymmetry scenario passengers need to move towards theticket gates firstly and then make a turn to pass through thegate In the following sections the gates are numbered as 1 2 5 in turn from top to bottom At the strategic level onlya fixed one of these gates could be counted as a part of globalroute But in practice a pedestrian would choose the optimalpath to replace the default one
To trigger the local route plan a virtual influence area isset in front of the ticket gate area where local route planningis needed as shown in Figure 5 When a pedestrian walksinto an influence zone the local route plan will be activatedto substitute global routeThe pedestrianrsquos destination will betemporarily reset to the local pathrsquos target point marked asD in Figure 5 which is normally the entrance of a stairway
to platform or a turning point of path Point O is the real-time location when pedestrians enter into the influence zoneIt represents the origin of local path Points Aj Bj are theentrance and the exit of gate 119895 The concentration zones areset to count how many pedestrians are queuing at each gateThe polygonal line OAjBjD describes local path 119895 It canbe divided into three segments in this scenario OAj AjBjand BjD Their lengths are 1198711119894119895 1198712119894119895 and 1198713119894119895 respectivelyHere 1198712119894119895 has the same length for each local path it can beignored in calculation Then the estimated walking time canbe simplified as
119881119871119894119895 =(11987111198941198951015840 + 11987131198941198951015840)
V119894(9)
In order to get reliable simulation results it is of greatimportance to assign the parameters of model with practicalvalues Generally in the design of critical facilities theperformance under peak passenger flow is a vital indicatorBased on field data obtained in peak-15-minute of morning
Journal of Advanced Transportation 7
A2
A3
A1
L1 L2 L3
Influence zoneConcentration zone Ticket gates
O
D
B2
B3
B1I
II
III
Figure 5 Illustration of local route algorithm
000
005
010
015
1 2 3 4 5service time (s)
perc
enta
ge (
)
000
004
008
012
016percentage
Figure 6 The service time of ticket gate based on field survey
and evening rush hour passengersrsquo arriving rate at the gatearea is subject to Poisson distribution (Equation (10)) Theaverage number of passengers is 40 per minute The desiredspeed ranges from 08ms to 15ms
119875 (119883 = 119896) = 120582119896119896 ∙ exp (minus120582) 119896 = 0 1 sdot sdot sdot (10)
where119883 is the arrival interval P is the probability and 120582 is aparameter
The value of service time 1199050 in (6) can be measured bythe interval between two passengers entering or leaving acertain ticket gate Some investigations are carried out insubway stations at morning peak on weekdaysThere is heavypassenger traffic during these periods and the passengersare always in a rush to go to work In the investigation werecorded the time interval between passengers leaving theend of the gate (point Bi in Figure 5) and the results areshown in Figure 6 It is observed that the service time for apedestrian obeys a positive skewness distribution It rangesfrom 08 s to 37 s and the mean value is 20 s So the value of1199050 in (6) can be regard as 2 seconds
The time for a passenger passing through the gate (frompoint Ai to Bi in Figure 5) is also observed in survey Theresults are shown in Figure 7 More than 80 passengers cango throughAiBi within 15 ssim 29 s and the average is 24 sThelength of a gate is 14m According to this the average speed
of a passenger passing through the gate can be obtainedAs shown in Figure 7(a) the distribution of passing speedpresents a normal distribution with an average of 065msInterestingly there is a long tail of the distribution of thepassing time (Figure 7(a)) and it disappears by transformingto speed (Figure 7(b))
In terms of time perception the passengers in a subwaystation can be summarized into three types The first one isadventurous They are active and more annoyed with time-waste of standing in a long queue than taking detour for afaster pass So their VOT of waiting time is greater Indeedcommuters in morning peak and passengers who are pressedfor time to catch a train or a flight are usually adventurousIn addition passengers who have higher requirements for acomfortable walking environment are more willing to choosea far path to avoid crowd they are also adventurous Thesecond type is the conservative such as the elderly Becauseof their difficulty in moving and other reasons they prefera path with shorter walking distance and without bypass Intheir views waiting is much more convenient than walkingaround In this case the VOT of walking time is 12 and ofwaiting time is 08 [48] For some mild passengers thereis no preference of waiting and walking and both couldbe interpreted as ldquonormalrdquo time Their perceived time isequivalent to the real time and the VOT is 1 The perceivedweights in (2) can be valued as (11) These values are alsoreferred to simulation experiments It is the best scheme tokeep the simulation results consistent with actual situation
120596119873119894 = 12120596119871119894 = 08
if temperament is adventurous
120596119873119894 = 08120596119871119894 = 12
if temperament is conserved
120596119873119894 = 10120596119871119894 = 10
if temperament is mild
(11)
8 Journal of Advanced Transportation
000
005
010
015
020
025
2 4 6passing time (s)
perc
enta
ge (
)
000
005
010
015
020
percent
(a)
00
01
02
025 050 075 100passing speed (ms)
perc
enta
ge (
)
005010015020025
percent
(b)
Figure 7 (a)The time of passing through a gate based on field survey and (b) the calculated passing speed
000
005
010
015
0 2 4 6
feeding time (s)
perc
enta
ge (
)
000
005
010
percent
Figure 8 The feeding time based on field survey
To pass through the ticket gate a special activity must beperformedmdashto check the card Due to individual habit andthe familiarity with subway the card feeding time of eachpassenger would be different In most cases scanning timeranges from 05 s to 20 s and the average value is 11s asshown in Figure 8 Occasionally some greater feeding timecan be observed because of a failure to prepare the smart cardin advance and improper operation The maximum value weobserved during rush hour is 738 s
The movement of passengers in subway stations and thesituations of passing through the ticket gates are also recordedin field survey the details will be mentioned in the followingsections
32 Multistage Route Choice Scheme Local path selection isa dynamic process The volume of passengers at each gateis time-varying and the utility value of each local path isalso changing When a pedestrian realizes that the utilityvalue of his original choice obviously increased or thatanother path is obviously superior to the original one hewill reevaluate the utility of each path and may change hischoice To solve the problem of reselection some studiesupdated the selection choice at each time step [8] Howeverthis leads to a pingndashpong effect [9] This drawback can be
corrected by using inertial system and relaxation processesWith the inertial system a new selection will be adoptedonly when it gains a certain increment in contrast to the oldselection [7]With relaxation processes the selection updatesin a given time interval such as 10 seconds [14 16] Thesemethods can achieve good results under certain conditionsHowever in a subway system it is difficult to determine anappropriate threshold for the inertial system and a time inter-val of reselection for the time-based relaxation processesFortunately according to field studies the selection processof passing through ticket gates can be abstracted into threestages (Figure 9) Firstly a pedestrian generally begins toconsider which gate is suitable and make a decision in frontof the gates with a distance of 30m Then he moves towardsthe target gate and always pays attention to the surroundingsIn most cases if necessary a selection change would be madein front of the gates with a distance of 17m Next when he isclose to the gate and prepares to check the card in one case hemay change his choice for the third time The case is that thepassenger in front of him occupancies the gate for a long timeand the next gate is unoccupied The location for the thirdchoice is set in front of the gates at a distance of 10m
Unlike the first choice as the pedestrian is considerableclose to the gates when he makes the second-time and thethird-time route choices he would pay more attention tothe distance between his current position and the gate (ieOAj) So the estimated walking time can be simplified to (12)What is more at that time the estimations on distance andpopulation size are relatively accurate He would have moreconfidence in his judgment and will choose the fastest pathas indicated in (13)
119881119871119894119895 =11987111198941198951015840V119894
(12)
Optimal local path for ped 119894= 119871119900119888119886119897 119875119886119905ℎ119895 | 119881119894119895 = min (1198811198941 1198811198942 sdot sdot sdot 119881119894119872)
(13)
As a passenger arrives at the gate hewill stop to press cardand then pass through When a passenger is scanning card
Journal of Advanced Transportation 9
10 m
17m
3 0m
Walk on Local Path
Walk on Global Path
Back to Global Path
First Choice Second Choice
Third Choice
Press Card
025m
Figure 9 The locations to make the multistage route choices
Table 1 Algorithm of local route planning
Input(a) A set of local path J(b) Preference of pedestrian i 120596119873119894119895 and 120596119871119894119895(c) Current speed V119894 and position (xi yi) of pedestrian i at time t
Output A suitable local path for pedestrian i at time t1 For each local path j in J do
2 estimate total walking distance sum1198711198981198941198951015840 by Equations ((4) (5)) (when pedestrian iis closed to the gatessum1198711198981198941198951015840 can be simplified to 11987111198941198951015840 in Equation (12))
3 calculate walking time 119881119871119894119895 by Equation (3)4 estimate the number of passengers queueing1198731015840119894119895 at local path j by Equation (7)5 calculate waiting time 119881119873119894119895 by Equation (6)6 calculate the estimated passing time of path j by Equation (2)7 End for8 If pedestrian i is closed enough to the ticket gates then
9 pass through the local path with minimum estimated passing time by Equation(13)
10 else calculate the probability 119875119894119895 of pedestrian i choose local path j by Equation (8)11 choose a suitable local path for pedestrian i based on 119875119894119895 and a random number12 End if
the front edge of his body is almost tangent to the entrance ofthe gate So the position of pressing card is set 025m aheadeach gate as shown in Figure 9
33 Results of Local Route Choice In order to test theproposed LRP model (the algorithm is summarized inTable 1) two experiments are carried out with the typicalscenarios (shown in Figure 4) The ratio of pedestrians withdifferent preferences is assumed as 111 The simulation lastsfor 5 minutes with 200 passengers In addition the actual
passenger flows of each gate in the two scenarios are alsoobserved in Beijing Subway at peak hours As shown inFigure 10 it indicates similar passenger distributions at eachgate in field investigations and simulation results Specificallyin the symmetric scenario most passengers go through thethree gates in the middle which are the shortest paths Whilethere is less passenger flow of the farthest gates 1 and 5 allthe 200 passengers continued to pass through the gates from12 s to 342 s and the average service level of the gates is36 personmin Similarly in the asymmetric scenario the
10 Journal of Advanced Transportation
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
Figure 10 Comparison of simulation results and survey data under symmetric layout (left) and asymmetric layout (right)
position 2
origin
position 1 position 3
destination
position 4
Waiting time(t2)
Pre-passing walking time(t1)
Post-passing walking time(t3)
Total time (t)
gate 1
gate 2
gate 3
gate 4
gate 505 m
Figure 11 Measurement positions and travel time
gates with the shortest distances (gate 4 and gate 5) have thelargest passenger flows accounting for 70 Due to the longdistance the number of passengers passed through gate 1 andgate 2 is small especially gate 1 only 4 persons passed Allpassengers passed through the gates within 10 s to 343 s
As shown in Figure 10 in the asymmetric scenario thepassenger flow of each gate exhibits a more nonuniformdistribution To gain an insight into the distribution ofpassengers with different preference the simulation results ofthe asymmetric scenario is a good case to illustrate this issueAs shown in Table 2 the distribution of the adventurous isobviously different from the others For the conserved andthe mild more than 40 percentage of the pedestrian volumepass through the nearest gate 5 and the total number ofpedestrians passing through from the two nearest paths (gate4 and 5) accounts for more than 70 In contrast most ofthe adventurous pass through gate 3 and 4 rather than thenearest gate 5 This is thanks to the fact that the nearest gate5 is always occupied by the conserved and the mild As a
result in order to avoid congestion the adventurous have topass through the farther gates In addition there are a fewof adventurous pedestrians pass through gate 1 the farthestpath However the conserved and the mild almost neverchoose gate 1 Therefore in the condition of a large numberof passengers passing through ticket gates the adventurouswould make an important contribution to the balance offacilities utilization
34 Passing Time To clarify the effects of passenger prefer-ence on local route decision-making we set four positions torecord the travel time for each pedestrian during simulationAs shown in Figure 11 the first position is the origin pointThe second is 05-metre ahead to the gatesThe third positionis at the front edge of gates where passengers are just walkinginto the gates The last position is the destination of pathThen four periods of time could be defined Specificallywaiting time (1199052) is the period for a passenger walking fromposition 2 to position 3 It includes the time of walking
Journal of Advanced Transportation 11
Table 2 Results of local route choice for different passengers
Temperament gate1 gate 2 gate 3 gate 4 gate 5 Totaladventurous 4 12 28 31 24 100 67 pconserved 1 9 17 31 41 100 70 pmild 0 5 21 32 43 100 63 pTotal 2 9 22 32 36 100 200 p
150
155
160
165
adventurous conserved mild
Tota
l Tim
e (s)
180
185
190
195
200
adventurous conserved mild
Wai
ting
Tim
e (s)
70
73
76
79
adventurous conserved mild
Pre-
pass
ing
Wal
king
Tim
e (s)
55
60
65
70
adventurous conserved mild
Post-
pass
ing
Wal
king
Tim
e (s)
Figure 12 The passing times for different passengers
scanning card and queuing up ldquoPrepassing walking timerdquo(1199051) is the time taken to reach position 2 from the originand ldquopostpassing walking timerdquo (1199053) is the time spent fromposition 3 to the destinationThe total time spent in thewholejourney from origin to destination is defined as t
As the expected speed and scan-card time of differentpedestrians follow the same distribution the walking dis-tances and queuing time of pedestrians can be compared
using the four time periods In the same way take theresults of the asymmetric scenario for example As shownin Figure 12 the conserved pedestrians who prefer to wait ata congested gate spend more time on waiting and less timeon walking And for the pedestrians avoiding congestion theresults are completely the opposite For the mild the timethey spend and the distance they traveled at each stage arealways at the middle level In particular the adventurous
12 Journal of Advanced Transportation
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
Figure 13 Four simulation cases with different choice preferences under symmetric layout (left) and asymmetric layout (right)
Table 3 The values of MD for different passengers
MD adventurous conserved mild Totalsymmetric layout 40 56 30 36asymmetric layout 28 48 36 28
passengers have the longest walking time (786 s beforepassing and 673 s after passing) and the shortest waitingtime (186 s) This is in consistent with the hypothesis thatthey prefer to farther path to avoid queuing On the contrarythe conserved passengers have the longest waiting time (194s) but get to the destination faster by walking the shortestdistance (total time is 1526 s) Although the adventurouswait 008s less time than the conserved they walk for 127smore than the conserved As a consequence the adventurousspend 090 s on the whole journey more than the conservedon average This is a kind of ldquofast is slowrdquo phenomenonWith the given population size and passengerrsquos compositionfrom an individualrsquos perspective it seems that waiting andpassing through the near paths is the most time-savingstrategy
35 Individual Preference The three kinds of personalityin this paper actually map different choice preferences Inorder to further investigate the differences among themfour simulation cases are established In the first three casesall pedestrians have the same character In this way theperformance of a kind of passengers can be revealed solelywithout interference from other types of passengers As acomparison each pedestrian in Case 4 would have one ofthe three choice preferences randomly while the passenger
volume stays the same Tohighlight the impact of preferencesthe passenger load in the four cases is triple as much asthe normal situation The passenger flow passed througheach gate is shown in Figure 13 In the four cases of thesymmetric scenario there are small passenger flow of the twomarginal gates (gate 1 and 5) Meanwhile the adventurousdisplay a better balance at the three middle gates and themildachieve a suboptimal balance whereas the passenger size ofthe conserved pass through the middle gate 3 is significantlyhigher than other cases In the asymmetric scenario Case 2(only the conserved) and Case 3 (only the mild) have similarresults the shorter distance a path is the more passengerspass through However Case 1 (only the adventurous) has adifferent performance the passenger population of each gateis much better balanced Except for the farthest gate 1 theproportions of the adventurous pass through each gate arealmost the same
To evaluate the passenger distribution the mean devi-ation (MD Equation (14)) is introduced as a coefficient ofuniformity The evaluation results are shown in Table 3 Alarger value of MDmeans a more uneven distribution of pas-sengers at each gate and a poorer utilization of the facilitiesFor instance in the symmetric scenario there is a seriouslynonuniform distribution of the conserved passengers withthe biggest value ofMD (56) In the asymmetric scenario theMD value of the adventurous is the smallest and the facilities
Journal of Advanced Transportation 13
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
Prop
ortio
n
Prop
ortio
n
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
Figure 14 The survey data and simulation results under symmetric layout (left) and asymmetric layout (right)
are made best use in this case Although the distributions ofthe mild and the conserved are similar the mild present abetter balance than the conserved Actually the MD values ofthe conserved are the biggest in the both scenarios and theyare not conducive to make full utilization of facilities
Interestingly with mixed choice preferences Case 4 ismore in line with the practical condition Both in thesymmetric and asymmetric scenarios Case 4 could achievewell balanced distributions Furthermore by a comparisonwith the simulation results in Section 33 (Figure 10) itcan be found that with the increased population size thedistribution of passenger flow of each gate is more balancedand as a result the facility utilization is improved
MD = 1119873119872sum119895=1
10038161003816100381610038161003816119909119895 minus 11990910038161003816100381610038161003816 (14)
where (1199091 119909119895 119909119872) is the proportion of passengerspassing through each gate obtained in an experiment 119909 is theaverage value
4 Simulation Experiment
In this section some experiments are carried out to showthe validity and stability of the model proposed in thispaper The techniques used to validate artificial pedestrianbehaviours can be identified as three main streams [49] thepedestrian dynamics descriptors such as the fundamentaldiagram the real data to validate the output of the modelsor simulation systems and the visual realism and the way ahumanobserver perceives in a simulationDue to the fact that
the main contributions of this paper focus on the mesoleveland macrolevel we verified our model with the latter twotechniques
41 Simulation of LRP Model As the core content of thelayered navigation algorithm the performance of the localroute planning model determines the practical value of thenavigation algorithm As mentioned in the part of introduc-tion there are three kinds of alternative methods of nodeselection behaviour They are based on utility probabilityand Logit model respectively Among each kind of methoda typical one with good performance is selected to comparewith our LRP model and the field data The comparedmethods were clearly stated in the literature and can bereproduced Compared with the above models the LRPmodel proposed in this paper makes further consideration ofpedestriansrsquo preferences the process and motivation to makechoice and the uncertainties underlying in estimation andselection
With the two typical layout scenarios of ticket gates thesimulation results are shown inFigure 14 In each experimentthe passenger size is the same as the survey It can beseen that the results of the LRP model in this paper havebetter performance than the other methods especially in thesymmetric scenario The simulation results can be evaluatedby the mean relative error (MRE) expressed as Equation (15)The errors of different methods are indicated in Table 4Withthe least values of MRE in both typical scenarios the LRPmodel in this research is the best method to describe thenode selection behaviour of ticket gates By the LRP model
14 Journal of Advanced Transportation
Table 4 The values of MRE by different algorithms
MRE This Research Shuaib M M 2018 [7] Li Y et al 2017 [16] Zheng X et al 2015 [11]symmetric layout 033 063 063 051asymmetric layout 029 038 043 035
Figure 15 A screenshot of the simulation process
we proposed the difference between the simulation resultsand the field data is reduced
MRE = 1119873119873sum119895=1
10038161003816100381610038161003816119909119895 minus 1199090119895 100381610038161003816100381610038161199090119895 (15)
where (1199091 119909119895 119909119873) is the proportion of passengers pass-ing through each gate obtained by simulation (11990901 1199090119895 1199090119873) is the proportion of the field data
42 Simulation of Layered Navigation Model In the layerednavigation algorithm of this paper the global path can bemodified by the local route planning in real time according tothe dynamic environment It performs well in simulating theself-optimizing path choice behaviour of passengers in realworld Firstly in order to illustrate the optimization functionof the LRP model in the layered navigation algorithm twoexperiments are carried out to simulate the movementsof passengers at the hall in a subway station In the firstexperiment agents are only guided by the global routeWhilein the other experiment the local route planning can beactivated according to dynamic environment
Take Qianmen Station on Line 8 of the Beijing Subwayas a case Four groups of passengers are loaded into eachexperiment Passengers could enter the station from theupper-left and the lower-right entrances Their arrival rate isassumed to follow a Poisson distribution with an average of50 persons per minute The passengers getting off a train willleave from the two exits located in the upper-right and thelower-left corner of the station Alighting passengers showa pulse distribution as the train arrives The trains wouldarrive at an interval of 2 minutes There are sixty alightingpassengers who would continue to reach the ticket gates inone minute
The experiments are carried out by the simulation tool wedeveloped According to the framework shown in Figure 3the static global routes for each passenger group are firstly
generated by an ldquoinitialization routerdquo module They areshown as the red polylines in Figure 15 Due to the similaractivity planning of pedestrians in a subway station it isreasonable to make the same global route for the pedestrianswhohave the sameODpair In particular the local route areasshown in Figure 5 should be set for the places needing localroute choice For example when a pedestrian gets to the ticketgate the local route plan will be activated Figure 15 shows ascreenshot after the simulation running for 54 seconds Thered ellipses represent agents
The level of service (LOS) is an important criterion toevaluate a metro station LOS is introduced by Fruin [50]to assess pedestrian facilities for the first time Based onthat Transit Capacity and Quality of Service Manual takesthe comfort and convenience of pedestrian into account andput forward a method to assessment the LOS as shown inTable 5 By the ldquocluster display moderdquo of our simulation toolthe LOS of local area can be marked in the map duringsimulation Figure 16 displays the screenshots of simulationIn Figure 16(a) passengers just walk along the global routeand do not consider local congestion This caused the crowd-edness at the entrance of the ticket gates and escalators Atthese places the LOS is always at level E In contrast whenthe agents can respond to dynamic surroundings by the localroute algorithm the congestions at bottleneck locations arerelieved effectively and the LOS is decreased in all local areasIn most cases the LOS is not above level C Level E onlyappears occasionally for a short time and could be adjustedby the self-organization of pedestrians quickly In conclusionthe model just based on the global route generates unrealisticbehaviour in the case of congestion However the modelincluding the LRP allows describing the redistribution of thepedestrians over the gates
In order to further demonstrate the effect of the hybridnavigation algorithm proposed in this paper we also simu-late the passenger movements in the above subway stationby commercial software VISSIM It is widely used in theresearch of pedestrian simulation The settings of building
Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

4 Journal of Advanced Transportation
Expanding obstacle
Real obstacle
pedestrian
Figure 2 Obstacle expanding illustration
connectivity of walkable space in the environment as a graphand perform search queries for each agent to determine acollision-free path We do not diverge from previous work inthis aspect and adopt visibility graph method to plan globalroute
According to the method of visibility graph the realisticenvironment is replaced by approximate polygon in propor-tion and the visible graph is composed by connecting all no-cross and unscreened lines By using Alowast algorithm [39] theshortest path between origin and destination can be found onthe visible graph which is the global navigation route
In global route all of intermediate points except originand destination are regarded as convex vertex of obstacles Intraditional visibility graphmethod a pedestrian is consideredas a point While in fact he occupies an area As a result apassenger overlaps with margin of obstacles when he walkson the global route [40] To avoid collision this papermakes acorrection to the intermediate points using half of pedestrianmaximum size as shown in Figure 2The virtual obstacles areused to calculate a global route
23 Local Route Planning Model Based on Estimated TravelTime Global route planning is used to find out the wholeroute from origin to destination If there are multiple routesthe shortest path in terms of Euclidean distance is searchedHowever when the pedestrian density is large it will causeunrealistic walking behaviour For example during pedes-trian passing a ticket gate at a subway station global routeplanning strategy will determine a fixed gate thereforepedestrians will wait in line at this gate and the other gateswill be left unused However according to observation andvideo analysis of pedestriansrsquo route choice behaviour at metrostations pedestrians will choose a farther unoccupied gate tosave travel time in practice The local route planning modelproposed in this paper is made in order to solve this problem
A pedestrian makes the route choice decision accordingto what has been seen in the surroundings and what has beenformulated in his or her mind Specifically environmentalfactors include path distance or travel time directness ofpath capacitywidth of exit visibility and service level [1641] The individual implicit factors include physical ability(walking speed) subjective preference familiarity with the
environment and following behaviour [42] From a review ofthe previous studies three factors namely the route lengthpassing time and density of pedestrian flow are identified tohave significant impacts on a pedestrianrsquos behaviour of routechoice [43]The route length is the primary factor that affectsroute choice behaviour and the crowdedness is a measureto reflect discomfort [44] What is more it is found that apedestrian tends to base his exit choice on time-dependentinformation rather than on time-independent information[9 45] Therefore the local route planning model proposedin this paper allows pedestrians choose a path accordingto the estimated passing time which is determined by thelength and the crowdedness of each local path shown as(1) and (2) The local route planning for each pedestrian isindependent and dynamic Namely which path will be theoptimal depends on the individual and the moment
119880119894j = 119881119894j + 120576119894j (1)
119881119894j = 120596119873119894j ∙ 119881119873119894j + 120596119871119894j ∙ 119881119871119894j (2)
where 119880119894j is the utility for pedestrian 119894 choosing pathj i=12 j=12 The random error 120576119894j is independentidentically distributed and subject to a Gumbel distribution119881119894j is a certain item indicating the estimated passing timeby pedestrian It consists of waiting time and walking time119881119873119894j 119881119871119894j is the estimated waiting time and the estimatedwalking time respectively 120596119879119894j and 120596119871119894j are the perceivedweights
In real-world situations passengers generally give aglance of the possible routes and make a rough estimation byhunch rather than by accurate calculations when making aroute choice Thus uncertainty of decision variables shouldbe introduced into the route choice model To an appropriatelevel the variability in time cost and uncertainty could helpldquoblurrdquo the agentsrsquo route choices In this way it can achievesimulation results that conform well to real situation
231 Passengersrsquo Perception of Time During the process ofa pedestrianrsquos journey on one hand he needs to walk for acertain distanceThe time spent on walking is called ldquowalkingtimerdquo On the other hand if there are congestions on the wayand the pedestrian need to queue for service he would haveto spend extra ldquowaiting timerdquo According to temperamentand time urgency pedestrians may have different values oftime (VOT) on ldquowalking timerdquo and ldquowaiting timerdquo It isobserved that there is a strong negative correlation betweenutility coefficients of distance and density meaning that anindividual who has a strong tendency to avoid congestion islikely to be more indifferent about walking for long distancesto reach a further less-congested path and vice versa [46]
232 Walking Time Pedestrian 119894 estimates the walking timeof the j-th local path as
119881119871119894119895 =sum1198711198981198941198951015840V119894
(3)
Journal of Advanced Transportation 5
V119894 is the desired walking speed of pedestrian i sum1198711198981198941198951015840 isthe estimated total length of local path 119895 If we divide path119895 into several segments the real length of segment 119898 is1198711198981198941198951198711198981198941198951015840 is the estimated length and can be calculate as (4)The estimated error is limited within 10 and 119896 is subject toa Gaussian distribution As a result 1198711198981198941198951015840 is also in a Gaussiandistribution with the average of 119871119898119894119895 and within range of[09sdot119871119898119894119895 11sdot119871119898119894119895]
1198711198981198941198951015840 = 119871119898119894119895 + 120576 (119871119898119894119895)120576 (119871119898119894119895) = 119896 ∙ 119871119898119894119895
119896 sim 119873 (0 0001) |119896| le 10(4)
It is worth noting that although the value of the estimatedlength has an error the order of local paths in length shouldnot be changed To ensure the right order of estimateddistances we should make a limit to the scope of estimatedlength Before estimating the length of segment 119898 for eachlocal path sort the actual distances from short to long Thencompare every two adjacent distances For 119871119898119894119901 lt 119871119898119894119902 if11 sdot 119871119898119894119901 gt 09 sdot 119871119898119894119902 the estimating range should be adjustedto
1198711198981198941199011015840 isin [[09 lowast 119871119898119894119901
(11 lowast 119871119898119894119901 + 09 lowast 119871119898119894119902)2 ]
]
1198711198981198941199021015840 isin [[(11 lowast 119871119898119894119901 + 09 lowast 119871119898119894119902)
2 11 lowast 119871119898119894119902]]
(5)
233Waiting Time Waiting time is estimated by the productof the estimated number of passengers in queue (1198731015840119894119895) and theaverage service time (1199050) as shown in (6)
119881119873119894119895 = 1198731015840119894119895 ∙ 1199050 (6)
Pedestrian 119894 would estimate the number of passengers queu-ing at local path 119895 as
1198731015840119894119895 = 119873119894119895 + 120576 (119873119894119895)
120576 (119873119894119895) =
0 119873119894 le 30 plusmn1 119873119894119895 isin [4 5]0 plusmn1 plusmn2 119873119894119895 ge 6
119875 120576 (119873119894119895) = 119883119901 = 13 (119883119901 = minus1 0 1)
119875 120576 (119873119894119895) = 119883119902 = 15 (119883119902 = minus2 minus1 0 1 2)
(7)
119873119894119895 is the actual number of queuing at local path 119895 whenpedestrian 119894makes decision 120576(119873119894119895) is estimation error and itwould enlarge as the queuing passenger population increases
Specifically in case of no more than three pedestriansqueuing pedestrian 119894 can identify the number accurately Ifthe number is greater than 3 the estimated error would obeya Discrete Uniform Distribution
234 Discrete Choice Model After the walking time and thewaiting time having been estimated the final piece of thepuzzle is how to decide which local path a passenger will passthrough As a problem of discrete choice we adopt the Logitmodel The probability of pedestrian 119894 choosing local path 119895is
119875119894119895 = exp (minus119881119894119895)sum119872119895=1 exp (minus119881119894119895)
119872sum119895=1
119875119894119895 = 1(8)
For a completely rational pedestrian he would choosethe most effective path to go through While in practice apedestrianrsquos decision is effected by some random factors suchas emotion and the pedestrians around him For this reason apedestrian will not accurately evaluate the route options andas a result the path with the smallest cost is not always chosen[47]Therefore the final decision is determined by a randomnumber according to the probabilities 119875119894119895
3 Model Application and Discussion
UtilizingMFCprovided byMicrosoftVisual Studio we devel-oped a pedestrian simulation tool to realize our navigationalgorithm Specifically to enable agents to autonomouslynavigate in complex spaces and crowded environment thetool combines the visibility graph at strategic level multistageroute choice scheme at tactical level and a variant of SocialForce Model at operational level The local route planningis realized by a target converter and local route settings Apedestrian can temporarily deviate from the global routetake reasonable detours to optimize his local route andreturn to global route after passing the local route regionAt the operational level a pedestrianrsquos movement towardsthe target point is driven by a resultant force which isaffected by the goalrsquos attraction barriers and other agentsThe framework of the layered navigation algorithm is shownin Figure 3
Thanks to the developed simulation tool the routechoices and crowd characteristics estimated by the navigationalgorithm can be favorably compared to the actual situationsin practice During simulation all the agent movements arerecorded to a database Then it can be analyzed to determinesomekey performancemetrics such as crowddensity journeytime and flow rates In addition the simulation can be playedback in real time (or faster) to provide a rich visual meansfor verifying and communicating Though the proposednavigation algorithm and simulation tool are applicable inmany scenarios the automatic fare gate in subway stations istaken as an example in this work
6 Journal of Advanced Transportation
Environment Map Modelling
Global Route Planning
To activate Local Route Planning and get the target point from the alternative local node selection
Pedestrian Setting
in a local path area
YesNo
Move to the target point driven by Social Force Model
Pedestrians generation on schedule
Get the target point from the global route
strategic level
tactical level
operational level
gender desired velocity OD preference
At time ti is Pedestrian m
Figure 3 The framework of the layered navigation algorithm
Walk direction Walk direction
OriginDestination
(a)
Walk Direction
Origin
Destination
(b)
Figure 4 The two simulation scenarios (a) symmetric layout and (b) asymmetric layout
31 Empirical Data and Simulation Settings According tofield survey in subway stations it is found that there aredifferent traffic lines because of the spatial layout of ticketgates Roughly the situation can be divided into two typicalscenarios ie the symmetry and the asymmetry scenarioAs shown in Figure 4 in the symmetry scenario passengersjust move forward and pass through the gate directly In theasymmetry scenario passengers need to move towards theticket gates firstly and then make a turn to pass through thegate In the following sections the gates are numbered as 1 2 5 in turn from top to bottom At the strategic level onlya fixed one of these gates could be counted as a part of globalroute But in practice a pedestrian would choose the optimalpath to replace the default one
To trigger the local route plan a virtual influence area isset in front of the ticket gate area where local route planningis needed as shown in Figure 5 When a pedestrian walksinto an influence zone the local route plan will be activatedto substitute global routeThe pedestrianrsquos destination will betemporarily reset to the local pathrsquos target point marked asD in Figure 5 which is normally the entrance of a stairway
to platform or a turning point of path Point O is the real-time location when pedestrians enter into the influence zoneIt represents the origin of local path Points Aj Bj are theentrance and the exit of gate 119895 The concentration zones areset to count how many pedestrians are queuing at each gateThe polygonal line OAjBjD describes local path 119895 It canbe divided into three segments in this scenario OAj AjBjand BjD Their lengths are 1198711119894119895 1198712119894119895 and 1198713119894119895 respectivelyHere 1198712119894119895 has the same length for each local path it can beignored in calculation Then the estimated walking time canbe simplified as
119881119871119894119895 =(11987111198941198951015840 + 11987131198941198951015840)
V119894(9)
In order to get reliable simulation results it is of greatimportance to assign the parameters of model with practicalvalues Generally in the design of critical facilities theperformance under peak passenger flow is a vital indicatorBased on field data obtained in peak-15-minute of morning
Journal of Advanced Transportation 7
A2
A3
A1
L1 L2 L3
Influence zoneConcentration zone Ticket gates
O
D
B2
B3
B1I
II
III
Figure 5 Illustration of local route algorithm
000
005
010
015
1 2 3 4 5service time (s)
perc
enta
ge (
)
000
004
008
012
016percentage
Figure 6 The service time of ticket gate based on field survey
and evening rush hour passengersrsquo arriving rate at the gatearea is subject to Poisson distribution (Equation (10)) Theaverage number of passengers is 40 per minute The desiredspeed ranges from 08ms to 15ms
119875 (119883 = 119896) = 120582119896119896 ∙ exp (minus120582) 119896 = 0 1 sdot sdot sdot (10)
where119883 is the arrival interval P is the probability and 120582 is aparameter
The value of service time 1199050 in (6) can be measured bythe interval between two passengers entering or leaving acertain ticket gate Some investigations are carried out insubway stations at morning peak on weekdaysThere is heavypassenger traffic during these periods and the passengersare always in a rush to go to work In the investigation werecorded the time interval between passengers leaving theend of the gate (point Bi in Figure 5) and the results areshown in Figure 6 It is observed that the service time for apedestrian obeys a positive skewness distribution It rangesfrom 08 s to 37 s and the mean value is 20 s So the value of1199050 in (6) can be regard as 2 seconds
The time for a passenger passing through the gate (frompoint Ai to Bi in Figure 5) is also observed in survey Theresults are shown in Figure 7 More than 80 passengers cango throughAiBi within 15 ssim 29 s and the average is 24 sThelength of a gate is 14m According to this the average speed
of a passenger passing through the gate can be obtainedAs shown in Figure 7(a) the distribution of passing speedpresents a normal distribution with an average of 065msInterestingly there is a long tail of the distribution of thepassing time (Figure 7(a)) and it disappears by transformingto speed (Figure 7(b))
In terms of time perception the passengers in a subwaystation can be summarized into three types The first one isadventurous They are active and more annoyed with time-waste of standing in a long queue than taking detour for afaster pass So their VOT of waiting time is greater Indeedcommuters in morning peak and passengers who are pressedfor time to catch a train or a flight are usually adventurousIn addition passengers who have higher requirements for acomfortable walking environment are more willing to choosea far path to avoid crowd they are also adventurous Thesecond type is the conservative such as the elderly Becauseof their difficulty in moving and other reasons they prefera path with shorter walking distance and without bypass Intheir views waiting is much more convenient than walkingaround In this case the VOT of walking time is 12 and ofwaiting time is 08 [48] For some mild passengers thereis no preference of waiting and walking and both couldbe interpreted as ldquonormalrdquo time Their perceived time isequivalent to the real time and the VOT is 1 The perceivedweights in (2) can be valued as (11) These values are alsoreferred to simulation experiments It is the best scheme tokeep the simulation results consistent with actual situation
120596119873119894 = 12120596119871119894 = 08
if temperament is adventurous
120596119873119894 = 08120596119871119894 = 12
if temperament is conserved
120596119873119894 = 10120596119871119894 = 10
if temperament is mild
(11)
8 Journal of Advanced Transportation
000
005
010
015
020
025
2 4 6passing time (s)
perc
enta
ge (
)
000
005
010
015
020
percent
(a)
00
01
02
025 050 075 100passing speed (ms)
perc
enta
ge (
)
005010015020025
percent
(b)
Figure 7 (a)The time of passing through a gate based on field survey and (b) the calculated passing speed
000
005
010
015
0 2 4 6
feeding time (s)
perc
enta
ge (
)
000
005
010
percent
Figure 8 The feeding time based on field survey
To pass through the ticket gate a special activity must beperformedmdashto check the card Due to individual habit andthe familiarity with subway the card feeding time of eachpassenger would be different In most cases scanning timeranges from 05 s to 20 s and the average value is 11s asshown in Figure 8 Occasionally some greater feeding timecan be observed because of a failure to prepare the smart cardin advance and improper operation The maximum value weobserved during rush hour is 738 s
The movement of passengers in subway stations and thesituations of passing through the ticket gates are also recordedin field survey the details will be mentioned in the followingsections
32 Multistage Route Choice Scheme Local path selection isa dynamic process The volume of passengers at each gateis time-varying and the utility value of each local path isalso changing When a pedestrian realizes that the utilityvalue of his original choice obviously increased or thatanother path is obviously superior to the original one hewill reevaluate the utility of each path and may change hischoice To solve the problem of reselection some studiesupdated the selection choice at each time step [8] Howeverthis leads to a pingndashpong effect [9] This drawback can be
corrected by using inertial system and relaxation processesWith the inertial system a new selection will be adoptedonly when it gains a certain increment in contrast to the oldselection [7]With relaxation processes the selection updatesin a given time interval such as 10 seconds [14 16] Thesemethods can achieve good results under certain conditionsHowever in a subway system it is difficult to determine anappropriate threshold for the inertial system and a time inter-val of reselection for the time-based relaxation processesFortunately according to field studies the selection processof passing through ticket gates can be abstracted into threestages (Figure 9) Firstly a pedestrian generally begins toconsider which gate is suitable and make a decision in frontof the gates with a distance of 30m Then he moves towardsthe target gate and always pays attention to the surroundingsIn most cases if necessary a selection change would be madein front of the gates with a distance of 17m Next when he isclose to the gate and prepares to check the card in one case hemay change his choice for the third time The case is that thepassenger in front of him occupancies the gate for a long timeand the next gate is unoccupied The location for the thirdchoice is set in front of the gates at a distance of 10m
Unlike the first choice as the pedestrian is considerableclose to the gates when he makes the second-time and thethird-time route choices he would pay more attention tothe distance between his current position and the gate (ieOAj) So the estimated walking time can be simplified to (12)What is more at that time the estimations on distance andpopulation size are relatively accurate He would have moreconfidence in his judgment and will choose the fastest pathas indicated in (13)
119881119871119894119895 =11987111198941198951015840V119894
(12)
Optimal local path for ped 119894= 119871119900119888119886119897 119875119886119905ℎ119895 | 119881119894119895 = min (1198811198941 1198811198942 sdot sdot sdot 119881119894119872)
(13)
As a passenger arrives at the gate hewill stop to press cardand then pass through When a passenger is scanning card
Journal of Advanced Transportation 9
10 m
17m
3 0m
Walk on Local Path
Walk on Global Path
Back to Global Path
First Choice Second Choice
Third Choice
Press Card
025m
Figure 9 The locations to make the multistage route choices
Table 1 Algorithm of local route planning
Input(a) A set of local path J(b) Preference of pedestrian i 120596119873119894119895 and 120596119871119894119895(c) Current speed V119894 and position (xi yi) of pedestrian i at time t
Output A suitable local path for pedestrian i at time t1 For each local path j in J do
2 estimate total walking distance sum1198711198981198941198951015840 by Equations ((4) (5)) (when pedestrian iis closed to the gatessum1198711198981198941198951015840 can be simplified to 11987111198941198951015840 in Equation (12))
3 calculate walking time 119881119871119894119895 by Equation (3)4 estimate the number of passengers queueing1198731015840119894119895 at local path j by Equation (7)5 calculate waiting time 119881119873119894119895 by Equation (6)6 calculate the estimated passing time of path j by Equation (2)7 End for8 If pedestrian i is closed enough to the ticket gates then
9 pass through the local path with minimum estimated passing time by Equation(13)
10 else calculate the probability 119875119894119895 of pedestrian i choose local path j by Equation (8)11 choose a suitable local path for pedestrian i based on 119875119894119895 and a random number12 End if
the front edge of his body is almost tangent to the entrance ofthe gate So the position of pressing card is set 025m aheadeach gate as shown in Figure 9
33 Results of Local Route Choice In order to test theproposed LRP model (the algorithm is summarized inTable 1) two experiments are carried out with the typicalscenarios (shown in Figure 4) The ratio of pedestrians withdifferent preferences is assumed as 111 The simulation lastsfor 5 minutes with 200 passengers In addition the actual
passenger flows of each gate in the two scenarios are alsoobserved in Beijing Subway at peak hours As shown inFigure 10 it indicates similar passenger distributions at eachgate in field investigations and simulation results Specificallyin the symmetric scenario most passengers go through thethree gates in the middle which are the shortest paths Whilethere is less passenger flow of the farthest gates 1 and 5 allthe 200 passengers continued to pass through the gates from12 s to 342 s and the average service level of the gates is36 personmin Similarly in the asymmetric scenario the
10 Journal of Advanced Transportation
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
Figure 10 Comparison of simulation results and survey data under symmetric layout (left) and asymmetric layout (right)
position 2
origin
position 1 position 3
destination
position 4
Waiting time(t2)
Pre-passing walking time(t1)
Post-passing walking time(t3)
Total time (t)
gate 1
gate 2
gate 3
gate 4
gate 505 m
Figure 11 Measurement positions and travel time
gates with the shortest distances (gate 4 and gate 5) have thelargest passenger flows accounting for 70 Due to the longdistance the number of passengers passed through gate 1 andgate 2 is small especially gate 1 only 4 persons passed Allpassengers passed through the gates within 10 s to 343 s
As shown in Figure 10 in the asymmetric scenario thepassenger flow of each gate exhibits a more nonuniformdistribution To gain an insight into the distribution ofpassengers with different preference the simulation results ofthe asymmetric scenario is a good case to illustrate this issueAs shown in Table 2 the distribution of the adventurous isobviously different from the others For the conserved andthe mild more than 40 percentage of the pedestrian volumepass through the nearest gate 5 and the total number ofpedestrians passing through from the two nearest paths (gate4 and 5) accounts for more than 70 In contrast most ofthe adventurous pass through gate 3 and 4 rather than thenearest gate 5 This is thanks to the fact that the nearest gate5 is always occupied by the conserved and the mild As a
result in order to avoid congestion the adventurous have topass through the farther gates In addition there are a fewof adventurous pedestrians pass through gate 1 the farthestpath However the conserved and the mild almost neverchoose gate 1 Therefore in the condition of a large numberof passengers passing through ticket gates the adventurouswould make an important contribution to the balance offacilities utilization
34 Passing Time To clarify the effects of passenger prefer-ence on local route decision-making we set four positions torecord the travel time for each pedestrian during simulationAs shown in Figure 11 the first position is the origin pointThe second is 05-metre ahead to the gatesThe third positionis at the front edge of gates where passengers are just walkinginto the gates The last position is the destination of pathThen four periods of time could be defined Specificallywaiting time (1199052) is the period for a passenger walking fromposition 2 to position 3 It includes the time of walking
Journal of Advanced Transportation 11
Table 2 Results of local route choice for different passengers
Temperament gate1 gate 2 gate 3 gate 4 gate 5 Totaladventurous 4 12 28 31 24 100 67 pconserved 1 9 17 31 41 100 70 pmild 0 5 21 32 43 100 63 pTotal 2 9 22 32 36 100 200 p
150
155
160
165
adventurous conserved mild
Tota
l Tim
e (s)
180
185
190
195
200
adventurous conserved mild
Wai
ting
Tim
e (s)
70
73
76
79
adventurous conserved mild
Pre-
pass
ing
Wal
king
Tim
e (s)
55
60
65
70
adventurous conserved mild
Post-
pass
ing
Wal
king
Tim
e (s)
Figure 12 The passing times for different passengers
scanning card and queuing up ldquoPrepassing walking timerdquo(1199051) is the time taken to reach position 2 from the originand ldquopostpassing walking timerdquo (1199053) is the time spent fromposition 3 to the destinationThe total time spent in thewholejourney from origin to destination is defined as t
As the expected speed and scan-card time of differentpedestrians follow the same distribution the walking dis-tances and queuing time of pedestrians can be compared
using the four time periods In the same way take theresults of the asymmetric scenario for example As shownin Figure 12 the conserved pedestrians who prefer to wait ata congested gate spend more time on waiting and less timeon walking And for the pedestrians avoiding congestion theresults are completely the opposite For the mild the timethey spend and the distance they traveled at each stage arealways at the middle level In particular the adventurous
12 Journal of Advanced Transportation
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
Figure 13 Four simulation cases with different choice preferences under symmetric layout (left) and asymmetric layout (right)
Table 3 The values of MD for different passengers
MD adventurous conserved mild Totalsymmetric layout 40 56 30 36asymmetric layout 28 48 36 28
passengers have the longest walking time (786 s beforepassing and 673 s after passing) and the shortest waitingtime (186 s) This is in consistent with the hypothesis thatthey prefer to farther path to avoid queuing On the contrarythe conserved passengers have the longest waiting time (194s) but get to the destination faster by walking the shortestdistance (total time is 1526 s) Although the adventurouswait 008s less time than the conserved they walk for 127smore than the conserved As a consequence the adventurousspend 090 s on the whole journey more than the conservedon average This is a kind of ldquofast is slowrdquo phenomenonWith the given population size and passengerrsquos compositionfrom an individualrsquos perspective it seems that waiting andpassing through the near paths is the most time-savingstrategy
35 Individual Preference The three kinds of personalityin this paper actually map different choice preferences Inorder to further investigate the differences among themfour simulation cases are established In the first three casesall pedestrians have the same character In this way theperformance of a kind of passengers can be revealed solelywithout interference from other types of passengers As acomparison each pedestrian in Case 4 would have one ofthe three choice preferences randomly while the passenger
volume stays the same Tohighlight the impact of preferencesthe passenger load in the four cases is triple as much asthe normal situation The passenger flow passed througheach gate is shown in Figure 13 In the four cases of thesymmetric scenario there are small passenger flow of the twomarginal gates (gate 1 and 5) Meanwhile the adventurousdisplay a better balance at the three middle gates and themildachieve a suboptimal balance whereas the passenger size ofthe conserved pass through the middle gate 3 is significantlyhigher than other cases In the asymmetric scenario Case 2(only the conserved) and Case 3 (only the mild) have similarresults the shorter distance a path is the more passengerspass through However Case 1 (only the adventurous) has adifferent performance the passenger population of each gateis much better balanced Except for the farthest gate 1 theproportions of the adventurous pass through each gate arealmost the same
To evaluate the passenger distribution the mean devi-ation (MD Equation (14)) is introduced as a coefficient ofuniformity The evaluation results are shown in Table 3 Alarger value of MDmeans a more uneven distribution of pas-sengers at each gate and a poorer utilization of the facilitiesFor instance in the symmetric scenario there is a seriouslynonuniform distribution of the conserved passengers withthe biggest value ofMD (56) In the asymmetric scenario theMD value of the adventurous is the smallest and the facilities
Journal of Advanced Transportation 13
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
Prop
ortio
n
Prop
ortio
n
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
Figure 14 The survey data and simulation results under symmetric layout (left) and asymmetric layout (right)
are made best use in this case Although the distributions ofthe mild and the conserved are similar the mild present abetter balance than the conserved Actually the MD values ofthe conserved are the biggest in the both scenarios and theyare not conducive to make full utilization of facilities
Interestingly with mixed choice preferences Case 4 ismore in line with the practical condition Both in thesymmetric and asymmetric scenarios Case 4 could achievewell balanced distributions Furthermore by a comparisonwith the simulation results in Section 33 (Figure 10) itcan be found that with the increased population size thedistribution of passenger flow of each gate is more balancedand as a result the facility utilization is improved
MD = 1119873119872sum119895=1
10038161003816100381610038161003816119909119895 minus 11990910038161003816100381610038161003816 (14)
where (1199091 119909119895 119909119872) is the proportion of passengerspassing through each gate obtained in an experiment 119909 is theaverage value
4 Simulation Experiment
In this section some experiments are carried out to showthe validity and stability of the model proposed in thispaper The techniques used to validate artificial pedestrianbehaviours can be identified as three main streams [49] thepedestrian dynamics descriptors such as the fundamentaldiagram the real data to validate the output of the modelsor simulation systems and the visual realism and the way ahumanobserver perceives in a simulationDue to the fact that
the main contributions of this paper focus on the mesoleveland macrolevel we verified our model with the latter twotechniques
41 Simulation of LRP Model As the core content of thelayered navigation algorithm the performance of the localroute planning model determines the practical value of thenavigation algorithm As mentioned in the part of introduc-tion there are three kinds of alternative methods of nodeselection behaviour They are based on utility probabilityand Logit model respectively Among each kind of methoda typical one with good performance is selected to comparewith our LRP model and the field data The comparedmethods were clearly stated in the literature and can bereproduced Compared with the above models the LRPmodel proposed in this paper makes further consideration ofpedestriansrsquo preferences the process and motivation to makechoice and the uncertainties underlying in estimation andselection
With the two typical layout scenarios of ticket gates thesimulation results are shown inFigure 14 In each experimentthe passenger size is the same as the survey It can beseen that the results of the LRP model in this paper havebetter performance than the other methods especially in thesymmetric scenario The simulation results can be evaluatedby the mean relative error (MRE) expressed as Equation (15)The errors of different methods are indicated in Table 4Withthe least values of MRE in both typical scenarios the LRPmodel in this research is the best method to describe thenode selection behaviour of ticket gates By the LRP model
14 Journal of Advanced Transportation
Table 4 The values of MRE by different algorithms
MRE This Research Shuaib M M 2018 [7] Li Y et al 2017 [16] Zheng X et al 2015 [11]symmetric layout 033 063 063 051asymmetric layout 029 038 043 035
Figure 15 A screenshot of the simulation process
we proposed the difference between the simulation resultsand the field data is reduced
MRE = 1119873119873sum119895=1
10038161003816100381610038161003816119909119895 minus 1199090119895 100381610038161003816100381610038161199090119895 (15)
where (1199091 119909119895 119909119873) is the proportion of passengers pass-ing through each gate obtained by simulation (11990901 1199090119895 1199090119873) is the proportion of the field data
42 Simulation of Layered Navigation Model In the layerednavigation algorithm of this paper the global path can bemodified by the local route planning in real time according tothe dynamic environment It performs well in simulating theself-optimizing path choice behaviour of passengers in realworld Firstly in order to illustrate the optimization functionof the LRP model in the layered navigation algorithm twoexperiments are carried out to simulate the movementsof passengers at the hall in a subway station In the firstexperiment agents are only guided by the global routeWhilein the other experiment the local route planning can beactivated according to dynamic environment
Take Qianmen Station on Line 8 of the Beijing Subwayas a case Four groups of passengers are loaded into eachexperiment Passengers could enter the station from theupper-left and the lower-right entrances Their arrival rate isassumed to follow a Poisson distribution with an average of50 persons per minute The passengers getting off a train willleave from the two exits located in the upper-right and thelower-left corner of the station Alighting passengers showa pulse distribution as the train arrives The trains wouldarrive at an interval of 2 minutes There are sixty alightingpassengers who would continue to reach the ticket gates inone minute
The experiments are carried out by the simulation tool wedeveloped According to the framework shown in Figure 3the static global routes for each passenger group are firstly
generated by an ldquoinitialization routerdquo module They areshown as the red polylines in Figure 15 Due to the similaractivity planning of pedestrians in a subway station it isreasonable to make the same global route for the pedestrianswhohave the sameODpair In particular the local route areasshown in Figure 5 should be set for the places needing localroute choice For example when a pedestrian gets to the ticketgate the local route plan will be activated Figure 15 shows ascreenshot after the simulation running for 54 seconds Thered ellipses represent agents
The level of service (LOS) is an important criterion toevaluate a metro station LOS is introduced by Fruin [50]to assess pedestrian facilities for the first time Based onthat Transit Capacity and Quality of Service Manual takesthe comfort and convenience of pedestrian into account andput forward a method to assessment the LOS as shown inTable 5 By the ldquocluster display moderdquo of our simulation toolthe LOS of local area can be marked in the map duringsimulation Figure 16 displays the screenshots of simulationIn Figure 16(a) passengers just walk along the global routeand do not consider local congestion This caused the crowd-edness at the entrance of the ticket gates and escalators Atthese places the LOS is always at level E In contrast whenthe agents can respond to dynamic surroundings by the localroute algorithm the congestions at bottleneck locations arerelieved effectively and the LOS is decreased in all local areasIn most cases the LOS is not above level C Level E onlyappears occasionally for a short time and could be adjustedby the self-organization of pedestrians quickly In conclusionthe model just based on the global route generates unrealisticbehaviour in the case of congestion However the modelincluding the LRP allows describing the redistribution of thepedestrians over the gates
In order to further demonstrate the effect of the hybridnavigation algorithm proposed in this paper we also simu-late the passenger movements in the above subway stationby commercial software VISSIM It is widely used in theresearch of pedestrian simulation The settings of building
Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 5
V119894 is the desired walking speed of pedestrian i sum1198711198981198941198951015840 isthe estimated total length of local path 119895 If we divide path119895 into several segments the real length of segment 119898 is1198711198981198941198951198711198981198941198951015840 is the estimated length and can be calculate as (4)The estimated error is limited within 10 and 119896 is subject toa Gaussian distribution As a result 1198711198981198941198951015840 is also in a Gaussiandistribution with the average of 119871119898119894119895 and within range of[09sdot119871119898119894119895 11sdot119871119898119894119895]
1198711198981198941198951015840 = 119871119898119894119895 + 120576 (119871119898119894119895)120576 (119871119898119894119895) = 119896 ∙ 119871119898119894119895
119896 sim 119873 (0 0001) |119896| le 10(4)
It is worth noting that although the value of the estimatedlength has an error the order of local paths in length shouldnot be changed To ensure the right order of estimateddistances we should make a limit to the scope of estimatedlength Before estimating the length of segment 119898 for eachlocal path sort the actual distances from short to long Thencompare every two adjacent distances For 119871119898119894119901 lt 119871119898119894119902 if11 sdot 119871119898119894119901 gt 09 sdot 119871119898119894119902 the estimating range should be adjustedto
1198711198981198941199011015840 isin [[09 lowast 119871119898119894119901
(11 lowast 119871119898119894119901 + 09 lowast 119871119898119894119902)2 ]
]
1198711198981198941199021015840 isin [[(11 lowast 119871119898119894119901 + 09 lowast 119871119898119894119902)
2 11 lowast 119871119898119894119902]]
(5)
233Waiting Time Waiting time is estimated by the productof the estimated number of passengers in queue (1198731015840119894119895) and theaverage service time (1199050) as shown in (6)
119881119873119894119895 = 1198731015840119894119895 ∙ 1199050 (6)
Pedestrian 119894 would estimate the number of passengers queu-ing at local path 119895 as
1198731015840119894119895 = 119873119894119895 + 120576 (119873119894119895)
120576 (119873119894119895) =
0 119873119894 le 30 plusmn1 119873119894119895 isin [4 5]0 plusmn1 plusmn2 119873119894119895 ge 6
119875 120576 (119873119894119895) = 119883119901 = 13 (119883119901 = minus1 0 1)
119875 120576 (119873119894119895) = 119883119902 = 15 (119883119902 = minus2 minus1 0 1 2)
(7)
119873119894119895 is the actual number of queuing at local path 119895 whenpedestrian 119894makes decision 120576(119873119894119895) is estimation error and itwould enlarge as the queuing passenger population increases
Specifically in case of no more than three pedestriansqueuing pedestrian 119894 can identify the number accurately Ifthe number is greater than 3 the estimated error would obeya Discrete Uniform Distribution
234 Discrete Choice Model After the walking time and thewaiting time having been estimated the final piece of thepuzzle is how to decide which local path a passenger will passthrough As a problem of discrete choice we adopt the Logitmodel The probability of pedestrian 119894 choosing local path 119895is
119875119894119895 = exp (minus119881119894119895)sum119872119895=1 exp (minus119881119894119895)
119872sum119895=1
119875119894119895 = 1(8)
For a completely rational pedestrian he would choosethe most effective path to go through While in practice apedestrianrsquos decision is effected by some random factors suchas emotion and the pedestrians around him For this reason apedestrian will not accurately evaluate the route options andas a result the path with the smallest cost is not always chosen[47]Therefore the final decision is determined by a randomnumber according to the probabilities 119875119894119895
3 Model Application and Discussion
UtilizingMFCprovided byMicrosoftVisual Studio we devel-oped a pedestrian simulation tool to realize our navigationalgorithm Specifically to enable agents to autonomouslynavigate in complex spaces and crowded environment thetool combines the visibility graph at strategic level multistageroute choice scheme at tactical level and a variant of SocialForce Model at operational level The local route planningis realized by a target converter and local route settings Apedestrian can temporarily deviate from the global routetake reasonable detours to optimize his local route andreturn to global route after passing the local route regionAt the operational level a pedestrianrsquos movement towardsthe target point is driven by a resultant force which isaffected by the goalrsquos attraction barriers and other agentsThe framework of the layered navigation algorithm is shownin Figure 3
Thanks to the developed simulation tool the routechoices and crowd characteristics estimated by the navigationalgorithm can be favorably compared to the actual situationsin practice During simulation all the agent movements arerecorded to a database Then it can be analyzed to determinesomekey performancemetrics such as crowddensity journeytime and flow rates In addition the simulation can be playedback in real time (or faster) to provide a rich visual meansfor verifying and communicating Though the proposednavigation algorithm and simulation tool are applicable inmany scenarios the automatic fare gate in subway stations istaken as an example in this work
6 Journal of Advanced Transportation
Environment Map Modelling
Global Route Planning
To activate Local Route Planning and get the target point from the alternative local node selection
Pedestrian Setting
in a local path area
YesNo
Move to the target point driven by Social Force Model
Pedestrians generation on schedule
Get the target point from the global route
strategic level
tactical level
operational level
gender desired velocity OD preference
At time ti is Pedestrian m
Figure 3 The framework of the layered navigation algorithm
Walk direction Walk direction
OriginDestination
(a)
Walk Direction
Origin
Destination
(b)
Figure 4 The two simulation scenarios (a) symmetric layout and (b) asymmetric layout
31 Empirical Data and Simulation Settings According tofield survey in subway stations it is found that there aredifferent traffic lines because of the spatial layout of ticketgates Roughly the situation can be divided into two typicalscenarios ie the symmetry and the asymmetry scenarioAs shown in Figure 4 in the symmetry scenario passengersjust move forward and pass through the gate directly In theasymmetry scenario passengers need to move towards theticket gates firstly and then make a turn to pass through thegate In the following sections the gates are numbered as 1 2 5 in turn from top to bottom At the strategic level onlya fixed one of these gates could be counted as a part of globalroute But in practice a pedestrian would choose the optimalpath to replace the default one
To trigger the local route plan a virtual influence area isset in front of the ticket gate area where local route planningis needed as shown in Figure 5 When a pedestrian walksinto an influence zone the local route plan will be activatedto substitute global routeThe pedestrianrsquos destination will betemporarily reset to the local pathrsquos target point marked asD in Figure 5 which is normally the entrance of a stairway
to platform or a turning point of path Point O is the real-time location when pedestrians enter into the influence zoneIt represents the origin of local path Points Aj Bj are theentrance and the exit of gate 119895 The concentration zones areset to count how many pedestrians are queuing at each gateThe polygonal line OAjBjD describes local path 119895 It canbe divided into three segments in this scenario OAj AjBjand BjD Their lengths are 1198711119894119895 1198712119894119895 and 1198713119894119895 respectivelyHere 1198712119894119895 has the same length for each local path it can beignored in calculation Then the estimated walking time canbe simplified as
119881119871119894119895 =(11987111198941198951015840 + 11987131198941198951015840)
V119894(9)
In order to get reliable simulation results it is of greatimportance to assign the parameters of model with practicalvalues Generally in the design of critical facilities theperformance under peak passenger flow is a vital indicatorBased on field data obtained in peak-15-minute of morning
Journal of Advanced Transportation 7
A2
A3
A1
L1 L2 L3
Influence zoneConcentration zone Ticket gates
O
D
B2
B3
B1I
II
III
Figure 5 Illustration of local route algorithm
000
005
010
015
1 2 3 4 5service time (s)
perc
enta
ge (
)
000
004
008
012
016percentage
Figure 6 The service time of ticket gate based on field survey
and evening rush hour passengersrsquo arriving rate at the gatearea is subject to Poisson distribution (Equation (10)) Theaverage number of passengers is 40 per minute The desiredspeed ranges from 08ms to 15ms
119875 (119883 = 119896) = 120582119896119896 ∙ exp (minus120582) 119896 = 0 1 sdot sdot sdot (10)
where119883 is the arrival interval P is the probability and 120582 is aparameter
The value of service time 1199050 in (6) can be measured bythe interval between two passengers entering or leaving acertain ticket gate Some investigations are carried out insubway stations at morning peak on weekdaysThere is heavypassenger traffic during these periods and the passengersare always in a rush to go to work In the investigation werecorded the time interval between passengers leaving theend of the gate (point Bi in Figure 5) and the results areshown in Figure 6 It is observed that the service time for apedestrian obeys a positive skewness distribution It rangesfrom 08 s to 37 s and the mean value is 20 s So the value of1199050 in (6) can be regard as 2 seconds
The time for a passenger passing through the gate (frompoint Ai to Bi in Figure 5) is also observed in survey Theresults are shown in Figure 7 More than 80 passengers cango throughAiBi within 15 ssim 29 s and the average is 24 sThelength of a gate is 14m According to this the average speed
of a passenger passing through the gate can be obtainedAs shown in Figure 7(a) the distribution of passing speedpresents a normal distribution with an average of 065msInterestingly there is a long tail of the distribution of thepassing time (Figure 7(a)) and it disappears by transformingto speed (Figure 7(b))
In terms of time perception the passengers in a subwaystation can be summarized into three types The first one isadventurous They are active and more annoyed with time-waste of standing in a long queue than taking detour for afaster pass So their VOT of waiting time is greater Indeedcommuters in morning peak and passengers who are pressedfor time to catch a train or a flight are usually adventurousIn addition passengers who have higher requirements for acomfortable walking environment are more willing to choosea far path to avoid crowd they are also adventurous Thesecond type is the conservative such as the elderly Becauseof their difficulty in moving and other reasons they prefera path with shorter walking distance and without bypass Intheir views waiting is much more convenient than walkingaround In this case the VOT of walking time is 12 and ofwaiting time is 08 [48] For some mild passengers thereis no preference of waiting and walking and both couldbe interpreted as ldquonormalrdquo time Their perceived time isequivalent to the real time and the VOT is 1 The perceivedweights in (2) can be valued as (11) These values are alsoreferred to simulation experiments It is the best scheme tokeep the simulation results consistent with actual situation
120596119873119894 = 12120596119871119894 = 08
if temperament is adventurous
120596119873119894 = 08120596119871119894 = 12
if temperament is conserved
120596119873119894 = 10120596119871119894 = 10
if temperament is mild
(11)
8 Journal of Advanced Transportation
000
005
010
015
020
025
2 4 6passing time (s)
perc
enta
ge (
)
000
005
010
015
020
percent
(a)
00
01
02
025 050 075 100passing speed (ms)
perc
enta
ge (
)
005010015020025
percent
(b)
Figure 7 (a)The time of passing through a gate based on field survey and (b) the calculated passing speed
000
005
010
015
0 2 4 6
feeding time (s)
perc
enta
ge (
)
000
005
010
percent
Figure 8 The feeding time based on field survey
To pass through the ticket gate a special activity must beperformedmdashto check the card Due to individual habit andthe familiarity with subway the card feeding time of eachpassenger would be different In most cases scanning timeranges from 05 s to 20 s and the average value is 11s asshown in Figure 8 Occasionally some greater feeding timecan be observed because of a failure to prepare the smart cardin advance and improper operation The maximum value weobserved during rush hour is 738 s
The movement of passengers in subway stations and thesituations of passing through the ticket gates are also recordedin field survey the details will be mentioned in the followingsections
32 Multistage Route Choice Scheme Local path selection isa dynamic process The volume of passengers at each gateis time-varying and the utility value of each local path isalso changing When a pedestrian realizes that the utilityvalue of his original choice obviously increased or thatanother path is obviously superior to the original one hewill reevaluate the utility of each path and may change hischoice To solve the problem of reselection some studiesupdated the selection choice at each time step [8] Howeverthis leads to a pingndashpong effect [9] This drawback can be
corrected by using inertial system and relaxation processesWith the inertial system a new selection will be adoptedonly when it gains a certain increment in contrast to the oldselection [7]With relaxation processes the selection updatesin a given time interval such as 10 seconds [14 16] Thesemethods can achieve good results under certain conditionsHowever in a subway system it is difficult to determine anappropriate threshold for the inertial system and a time inter-val of reselection for the time-based relaxation processesFortunately according to field studies the selection processof passing through ticket gates can be abstracted into threestages (Figure 9) Firstly a pedestrian generally begins toconsider which gate is suitable and make a decision in frontof the gates with a distance of 30m Then he moves towardsthe target gate and always pays attention to the surroundingsIn most cases if necessary a selection change would be madein front of the gates with a distance of 17m Next when he isclose to the gate and prepares to check the card in one case hemay change his choice for the third time The case is that thepassenger in front of him occupancies the gate for a long timeand the next gate is unoccupied The location for the thirdchoice is set in front of the gates at a distance of 10m
Unlike the first choice as the pedestrian is considerableclose to the gates when he makes the second-time and thethird-time route choices he would pay more attention tothe distance between his current position and the gate (ieOAj) So the estimated walking time can be simplified to (12)What is more at that time the estimations on distance andpopulation size are relatively accurate He would have moreconfidence in his judgment and will choose the fastest pathas indicated in (13)
119881119871119894119895 =11987111198941198951015840V119894
(12)
Optimal local path for ped 119894= 119871119900119888119886119897 119875119886119905ℎ119895 | 119881119894119895 = min (1198811198941 1198811198942 sdot sdot sdot 119881119894119872)
(13)
As a passenger arrives at the gate hewill stop to press cardand then pass through When a passenger is scanning card
Journal of Advanced Transportation 9
10 m
17m
3 0m
Walk on Local Path
Walk on Global Path
Back to Global Path
First Choice Second Choice
Third Choice
Press Card
025m
Figure 9 The locations to make the multistage route choices
Table 1 Algorithm of local route planning
Input(a) A set of local path J(b) Preference of pedestrian i 120596119873119894119895 and 120596119871119894119895(c) Current speed V119894 and position (xi yi) of pedestrian i at time t
Output A suitable local path for pedestrian i at time t1 For each local path j in J do
2 estimate total walking distance sum1198711198981198941198951015840 by Equations ((4) (5)) (when pedestrian iis closed to the gatessum1198711198981198941198951015840 can be simplified to 11987111198941198951015840 in Equation (12))
3 calculate walking time 119881119871119894119895 by Equation (3)4 estimate the number of passengers queueing1198731015840119894119895 at local path j by Equation (7)5 calculate waiting time 119881119873119894119895 by Equation (6)6 calculate the estimated passing time of path j by Equation (2)7 End for8 If pedestrian i is closed enough to the ticket gates then
9 pass through the local path with minimum estimated passing time by Equation(13)
10 else calculate the probability 119875119894119895 of pedestrian i choose local path j by Equation (8)11 choose a suitable local path for pedestrian i based on 119875119894119895 and a random number12 End if
the front edge of his body is almost tangent to the entrance ofthe gate So the position of pressing card is set 025m aheadeach gate as shown in Figure 9
33 Results of Local Route Choice In order to test theproposed LRP model (the algorithm is summarized inTable 1) two experiments are carried out with the typicalscenarios (shown in Figure 4) The ratio of pedestrians withdifferent preferences is assumed as 111 The simulation lastsfor 5 minutes with 200 passengers In addition the actual
passenger flows of each gate in the two scenarios are alsoobserved in Beijing Subway at peak hours As shown inFigure 10 it indicates similar passenger distributions at eachgate in field investigations and simulation results Specificallyin the symmetric scenario most passengers go through thethree gates in the middle which are the shortest paths Whilethere is less passenger flow of the farthest gates 1 and 5 allthe 200 passengers continued to pass through the gates from12 s to 342 s and the average service level of the gates is36 personmin Similarly in the asymmetric scenario the
10 Journal of Advanced Transportation
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
Figure 10 Comparison of simulation results and survey data under symmetric layout (left) and asymmetric layout (right)
position 2
origin
position 1 position 3
destination
position 4
Waiting time(t2)
Pre-passing walking time(t1)
Post-passing walking time(t3)
Total time (t)
gate 1
gate 2
gate 3
gate 4
gate 505 m
Figure 11 Measurement positions and travel time
gates with the shortest distances (gate 4 and gate 5) have thelargest passenger flows accounting for 70 Due to the longdistance the number of passengers passed through gate 1 andgate 2 is small especially gate 1 only 4 persons passed Allpassengers passed through the gates within 10 s to 343 s
As shown in Figure 10 in the asymmetric scenario thepassenger flow of each gate exhibits a more nonuniformdistribution To gain an insight into the distribution ofpassengers with different preference the simulation results ofthe asymmetric scenario is a good case to illustrate this issueAs shown in Table 2 the distribution of the adventurous isobviously different from the others For the conserved andthe mild more than 40 percentage of the pedestrian volumepass through the nearest gate 5 and the total number ofpedestrians passing through from the two nearest paths (gate4 and 5) accounts for more than 70 In contrast most ofthe adventurous pass through gate 3 and 4 rather than thenearest gate 5 This is thanks to the fact that the nearest gate5 is always occupied by the conserved and the mild As a
result in order to avoid congestion the adventurous have topass through the farther gates In addition there are a fewof adventurous pedestrians pass through gate 1 the farthestpath However the conserved and the mild almost neverchoose gate 1 Therefore in the condition of a large numberof passengers passing through ticket gates the adventurouswould make an important contribution to the balance offacilities utilization
34 Passing Time To clarify the effects of passenger prefer-ence on local route decision-making we set four positions torecord the travel time for each pedestrian during simulationAs shown in Figure 11 the first position is the origin pointThe second is 05-metre ahead to the gatesThe third positionis at the front edge of gates where passengers are just walkinginto the gates The last position is the destination of pathThen four periods of time could be defined Specificallywaiting time (1199052) is the period for a passenger walking fromposition 2 to position 3 It includes the time of walking
Journal of Advanced Transportation 11
Table 2 Results of local route choice for different passengers
Temperament gate1 gate 2 gate 3 gate 4 gate 5 Totaladventurous 4 12 28 31 24 100 67 pconserved 1 9 17 31 41 100 70 pmild 0 5 21 32 43 100 63 pTotal 2 9 22 32 36 100 200 p
150
155
160
165
adventurous conserved mild
Tota
l Tim
e (s)
180
185
190
195
200
adventurous conserved mild
Wai
ting
Tim
e (s)
70
73
76
79
adventurous conserved mild
Pre-
pass
ing
Wal
king
Tim
e (s)
55
60
65
70
adventurous conserved mild
Post-
pass
ing
Wal
king
Tim
e (s)
Figure 12 The passing times for different passengers
scanning card and queuing up ldquoPrepassing walking timerdquo(1199051) is the time taken to reach position 2 from the originand ldquopostpassing walking timerdquo (1199053) is the time spent fromposition 3 to the destinationThe total time spent in thewholejourney from origin to destination is defined as t
As the expected speed and scan-card time of differentpedestrians follow the same distribution the walking dis-tances and queuing time of pedestrians can be compared
using the four time periods In the same way take theresults of the asymmetric scenario for example As shownin Figure 12 the conserved pedestrians who prefer to wait ata congested gate spend more time on waiting and less timeon walking And for the pedestrians avoiding congestion theresults are completely the opposite For the mild the timethey spend and the distance they traveled at each stage arealways at the middle level In particular the adventurous
12 Journal of Advanced Transportation
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
Figure 13 Four simulation cases with different choice preferences under symmetric layout (left) and asymmetric layout (right)
Table 3 The values of MD for different passengers
MD adventurous conserved mild Totalsymmetric layout 40 56 30 36asymmetric layout 28 48 36 28
passengers have the longest walking time (786 s beforepassing and 673 s after passing) and the shortest waitingtime (186 s) This is in consistent with the hypothesis thatthey prefer to farther path to avoid queuing On the contrarythe conserved passengers have the longest waiting time (194s) but get to the destination faster by walking the shortestdistance (total time is 1526 s) Although the adventurouswait 008s less time than the conserved they walk for 127smore than the conserved As a consequence the adventurousspend 090 s on the whole journey more than the conservedon average This is a kind of ldquofast is slowrdquo phenomenonWith the given population size and passengerrsquos compositionfrom an individualrsquos perspective it seems that waiting andpassing through the near paths is the most time-savingstrategy
35 Individual Preference The three kinds of personalityin this paper actually map different choice preferences Inorder to further investigate the differences among themfour simulation cases are established In the first three casesall pedestrians have the same character In this way theperformance of a kind of passengers can be revealed solelywithout interference from other types of passengers As acomparison each pedestrian in Case 4 would have one ofthe three choice preferences randomly while the passenger
volume stays the same Tohighlight the impact of preferencesthe passenger load in the four cases is triple as much asthe normal situation The passenger flow passed througheach gate is shown in Figure 13 In the four cases of thesymmetric scenario there are small passenger flow of the twomarginal gates (gate 1 and 5) Meanwhile the adventurousdisplay a better balance at the three middle gates and themildachieve a suboptimal balance whereas the passenger size ofthe conserved pass through the middle gate 3 is significantlyhigher than other cases In the asymmetric scenario Case 2(only the conserved) and Case 3 (only the mild) have similarresults the shorter distance a path is the more passengerspass through However Case 1 (only the adventurous) has adifferent performance the passenger population of each gateis much better balanced Except for the farthest gate 1 theproportions of the adventurous pass through each gate arealmost the same
To evaluate the passenger distribution the mean devi-ation (MD Equation (14)) is introduced as a coefficient ofuniformity The evaluation results are shown in Table 3 Alarger value of MDmeans a more uneven distribution of pas-sengers at each gate and a poorer utilization of the facilitiesFor instance in the symmetric scenario there is a seriouslynonuniform distribution of the conserved passengers withthe biggest value ofMD (56) In the asymmetric scenario theMD value of the adventurous is the smallest and the facilities
Journal of Advanced Transportation 13
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
Prop
ortio
n
Prop
ortio
n
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
Figure 14 The survey data and simulation results under symmetric layout (left) and asymmetric layout (right)
are made best use in this case Although the distributions ofthe mild and the conserved are similar the mild present abetter balance than the conserved Actually the MD values ofthe conserved are the biggest in the both scenarios and theyare not conducive to make full utilization of facilities
Interestingly with mixed choice preferences Case 4 ismore in line with the practical condition Both in thesymmetric and asymmetric scenarios Case 4 could achievewell balanced distributions Furthermore by a comparisonwith the simulation results in Section 33 (Figure 10) itcan be found that with the increased population size thedistribution of passenger flow of each gate is more balancedand as a result the facility utilization is improved
MD = 1119873119872sum119895=1
10038161003816100381610038161003816119909119895 minus 11990910038161003816100381610038161003816 (14)
where (1199091 119909119895 119909119872) is the proportion of passengerspassing through each gate obtained in an experiment 119909 is theaverage value
4 Simulation Experiment
In this section some experiments are carried out to showthe validity and stability of the model proposed in thispaper The techniques used to validate artificial pedestrianbehaviours can be identified as three main streams [49] thepedestrian dynamics descriptors such as the fundamentaldiagram the real data to validate the output of the modelsor simulation systems and the visual realism and the way ahumanobserver perceives in a simulationDue to the fact that
the main contributions of this paper focus on the mesoleveland macrolevel we verified our model with the latter twotechniques
41 Simulation of LRP Model As the core content of thelayered navigation algorithm the performance of the localroute planning model determines the practical value of thenavigation algorithm As mentioned in the part of introduc-tion there are three kinds of alternative methods of nodeselection behaviour They are based on utility probabilityand Logit model respectively Among each kind of methoda typical one with good performance is selected to comparewith our LRP model and the field data The comparedmethods were clearly stated in the literature and can bereproduced Compared with the above models the LRPmodel proposed in this paper makes further consideration ofpedestriansrsquo preferences the process and motivation to makechoice and the uncertainties underlying in estimation andselection
With the two typical layout scenarios of ticket gates thesimulation results are shown inFigure 14 In each experimentthe passenger size is the same as the survey It can beseen that the results of the LRP model in this paper havebetter performance than the other methods especially in thesymmetric scenario The simulation results can be evaluatedby the mean relative error (MRE) expressed as Equation (15)The errors of different methods are indicated in Table 4Withthe least values of MRE in both typical scenarios the LRPmodel in this research is the best method to describe thenode selection behaviour of ticket gates By the LRP model
14 Journal of Advanced Transportation
Table 4 The values of MRE by different algorithms
MRE This Research Shuaib M M 2018 [7] Li Y et al 2017 [16] Zheng X et al 2015 [11]symmetric layout 033 063 063 051asymmetric layout 029 038 043 035
Figure 15 A screenshot of the simulation process
we proposed the difference between the simulation resultsand the field data is reduced
MRE = 1119873119873sum119895=1
10038161003816100381610038161003816119909119895 minus 1199090119895 100381610038161003816100381610038161199090119895 (15)
where (1199091 119909119895 119909119873) is the proportion of passengers pass-ing through each gate obtained by simulation (11990901 1199090119895 1199090119873) is the proportion of the field data
42 Simulation of Layered Navigation Model In the layerednavigation algorithm of this paper the global path can bemodified by the local route planning in real time according tothe dynamic environment It performs well in simulating theself-optimizing path choice behaviour of passengers in realworld Firstly in order to illustrate the optimization functionof the LRP model in the layered navigation algorithm twoexperiments are carried out to simulate the movementsof passengers at the hall in a subway station In the firstexperiment agents are only guided by the global routeWhilein the other experiment the local route planning can beactivated according to dynamic environment
Take Qianmen Station on Line 8 of the Beijing Subwayas a case Four groups of passengers are loaded into eachexperiment Passengers could enter the station from theupper-left and the lower-right entrances Their arrival rate isassumed to follow a Poisson distribution with an average of50 persons per minute The passengers getting off a train willleave from the two exits located in the upper-right and thelower-left corner of the station Alighting passengers showa pulse distribution as the train arrives The trains wouldarrive at an interval of 2 minutes There are sixty alightingpassengers who would continue to reach the ticket gates inone minute
The experiments are carried out by the simulation tool wedeveloped According to the framework shown in Figure 3the static global routes for each passenger group are firstly
generated by an ldquoinitialization routerdquo module They areshown as the red polylines in Figure 15 Due to the similaractivity planning of pedestrians in a subway station it isreasonable to make the same global route for the pedestrianswhohave the sameODpair In particular the local route areasshown in Figure 5 should be set for the places needing localroute choice For example when a pedestrian gets to the ticketgate the local route plan will be activated Figure 15 shows ascreenshot after the simulation running for 54 seconds Thered ellipses represent agents
The level of service (LOS) is an important criterion toevaluate a metro station LOS is introduced by Fruin [50]to assess pedestrian facilities for the first time Based onthat Transit Capacity and Quality of Service Manual takesthe comfort and convenience of pedestrian into account andput forward a method to assessment the LOS as shown inTable 5 By the ldquocluster display moderdquo of our simulation toolthe LOS of local area can be marked in the map duringsimulation Figure 16 displays the screenshots of simulationIn Figure 16(a) passengers just walk along the global routeand do not consider local congestion This caused the crowd-edness at the entrance of the ticket gates and escalators Atthese places the LOS is always at level E In contrast whenthe agents can respond to dynamic surroundings by the localroute algorithm the congestions at bottleneck locations arerelieved effectively and the LOS is decreased in all local areasIn most cases the LOS is not above level C Level E onlyappears occasionally for a short time and could be adjustedby the self-organization of pedestrians quickly In conclusionthe model just based on the global route generates unrealisticbehaviour in the case of congestion However the modelincluding the LRP allows describing the redistribution of thepedestrians over the gates
In order to further demonstrate the effect of the hybridnavigation algorithm proposed in this paper we also simu-late the passenger movements in the above subway stationby commercial software VISSIM It is widely used in theresearch of pedestrian simulation The settings of building
Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

6 Journal of Advanced Transportation
Environment Map Modelling
Global Route Planning
To activate Local Route Planning and get the target point from the alternative local node selection
Pedestrian Setting
in a local path area
YesNo
Move to the target point driven by Social Force Model
Pedestrians generation on schedule
Get the target point from the global route
strategic level
tactical level
operational level
gender desired velocity OD preference
At time ti is Pedestrian m
Figure 3 The framework of the layered navigation algorithm
Walk direction Walk direction
OriginDestination
(a)
Walk Direction
Origin
Destination
(b)
Figure 4 The two simulation scenarios (a) symmetric layout and (b) asymmetric layout
31 Empirical Data and Simulation Settings According tofield survey in subway stations it is found that there aredifferent traffic lines because of the spatial layout of ticketgates Roughly the situation can be divided into two typicalscenarios ie the symmetry and the asymmetry scenarioAs shown in Figure 4 in the symmetry scenario passengersjust move forward and pass through the gate directly In theasymmetry scenario passengers need to move towards theticket gates firstly and then make a turn to pass through thegate In the following sections the gates are numbered as 1 2 5 in turn from top to bottom At the strategic level onlya fixed one of these gates could be counted as a part of globalroute But in practice a pedestrian would choose the optimalpath to replace the default one
To trigger the local route plan a virtual influence area isset in front of the ticket gate area where local route planningis needed as shown in Figure 5 When a pedestrian walksinto an influence zone the local route plan will be activatedto substitute global routeThe pedestrianrsquos destination will betemporarily reset to the local pathrsquos target point marked asD in Figure 5 which is normally the entrance of a stairway
to platform or a turning point of path Point O is the real-time location when pedestrians enter into the influence zoneIt represents the origin of local path Points Aj Bj are theentrance and the exit of gate 119895 The concentration zones areset to count how many pedestrians are queuing at each gateThe polygonal line OAjBjD describes local path 119895 It canbe divided into three segments in this scenario OAj AjBjand BjD Their lengths are 1198711119894119895 1198712119894119895 and 1198713119894119895 respectivelyHere 1198712119894119895 has the same length for each local path it can beignored in calculation Then the estimated walking time canbe simplified as
119881119871119894119895 =(11987111198941198951015840 + 11987131198941198951015840)
V119894(9)
In order to get reliable simulation results it is of greatimportance to assign the parameters of model with practicalvalues Generally in the design of critical facilities theperformance under peak passenger flow is a vital indicatorBased on field data obtained in peak-15-minute of morning
Journal of Advanced Transportation 7
A2
A3
A1
L1 L2 L3
Influence zoneConcentration zone Ticket gates
O
D
B2
B3
B1I
II
III
Figure 5 Illustration of local route algorithm
000
005
010
015
1 2 3 4 5service time (s)
perc
enta
ge (
)
000
004
008
012
016percentage
Figure 6 The service time of ticket gate based on field survey
and evening rush hour passengersrsquo arriving rate at the gatearea is subject to Poisson distribution (Equation (10)) Theaverage number of passengers is 40 per minute The desiredspeed ranges from 08ms to 15ms
119875 (119883 = 119896) = 120582119896119896 ∙ exp (minus120582) 119896 = 0 1 sdot sdot sdot (10)
where119883 is the arrival interval P is the probability and 120582 is aparameter
The value of service time 1199050 in (6) can be measured bythe interval between two passengers entering or leaving acertain ticket gate Some investigations are carried out insubway stations at morning peak on weekdaysThere is heavypassenger traffic during these periods and the passengersare always in a rush to go to work In the investigation werecorded the time interval between passengers leaving theend of the gate (point Bi in Figure 5) and the results areshown in Figure 6 It is observed that the service time for apedestrian obeys a positive skewness distribution It rangesfrom 08 s to 37 s and the mean value is 20 s So the value of1199050 in (6) can be regard as 2 seconds
The time for a passenger passing through the gate (frompoint Ai to Bi in Figure 5) is also observed in survey Theresults are shown in Figure 7 More than 80 passengers cango throughAiBi within 15 ssim 29 s and the average is 24 sThelength of a gate is 14m According to this the average speed
of a passenger passing through the gate can be obtainedAs shown in Figure 7(a) the distribution of passing speedpresents a normal distribution with an average of 065msInterestingly there is a long tail of the distribution of thepassing time (Figure 7(a)) and it disappears by transformingto speed (Figure 7(b))
In terms of time perception the passengers in a subwaystation can be summarized into three types The first one isadventurous They are active and more annoyed with time-waste of standing in a long queue than taking detour for afaster pass So their VOT of waiting time is greater Indeedcommuters in morning peak and passengers who are pressedfor time to catch a train or a flight are usually adventurousIn addition passengers who have higher requirements for acomfortable walking environment are more willing to choosea far path to avoid crowd they are also adventurous Thesecond type is the conservative such as the elderly Becauseof their difficulty in moving and other reasons they prefera path with shorter walking distance and without bypass Intheir views waiting is much more convenient than walkingaround In this case the VOT of walking time is 12 and ofwaiting time is 08 [48] For some mild passengers thereis no preference of waiting and walking and both couldbe interpreted as ldquonormalrdquo time Their perceived time isequivalent to the real time and the VOT is 1 The perceivedweights in (2) can be valued as (11) These values are alsoreferred to simulation experiments It is the best scheme tokeep the simulation results consistent with actual situation
120596119873119894 = 12120596119871119894 = 08
if temperament is adventurous
120596119873119894 = 08120596119871119894 = 12
if temperament is conserved
120596119873119894 = 10120596119871119894 = 10
if temperament is mild
(11)
8 Journal of Advanced Transportation
000
005
010
015
020
025
2 4 6passing time (s)
perc
enta
ge (
)
000
005
010
015
020
percent
(a)
00
01
02
025 050 075 100passing speed (ms)
perc
enta
ge (
)
005010015020025
percent
(b)
Figure 7 (a)The time of passing through a gate based on field survey and (b) the calculated passing speed
000
005
010
015
0 2 4 6
feeding time (s)
perc
enta
ge (
)
000
005
010
percent
Figure 8 The feeding time based on field survey
To pass through the ticket gate a special activity must beperformedmdashto check the card Due to individual habit andthe familiarity with subway the card feeding time of eachpassenger would be different In most cases scanning timeranges from 05 s to 20 s and the average value is 11s asshown in Figure 8 Occasionally some greater feeding timecan be observed because of a failure to prepare the smart cardin advance and improper operation The maximum value weobserved during rush hour is 738 s
The movement of passengers in subway stations and thesituations of passing through the ticket gates are also recordedin field survey the details will be mentioned in the followingsections
32 Multistage Route Choice Scheme Local path selection isa dynamic process The volume of passengers at each gateis time-varying and the utility value of each local path isalso changing When a pedestrian realizes that the utilityvalue of his original choice obviously increased or thatanother path is obviously superior to the original one hewill reevaluate the utility of each path and may change hischoice To solve the problem of reselection some studiesupdated the selection choice at each time step [8] Howeverthis leads to a pingndashpong effect [9] This drawback can be
corrected by using inertial system and relaxation processesWith the inertial system a new selection will be adoptedonly when it gains a certain increment in contrast to the oldselection [7]With relaxation processes the selection updatesin a given time interval such as 10 seconds [14 16] Thesemethods can achieve good results under certain conditionsHowever in a subway system it is difficult to determine anappropriate threshold for the inertial system and a time inter-val of reselection for the time-based relaxation processesFortunately according to field studies the selection processof passing through ticket gates can be abstracted into threestages (Figure 9) Firstly a pedestrian generally begins toconsider which gate is suitable and make a decision in frontof the gates with a distance of 30m Then he moves towardsthe target gate and always pays attention to the surroundingsIn most cases if necessary a selection change would be madein front of the gates with a distance of 17m Next when he isclose to the gate and prepares to check the card in one case hemay change his choice for the third time The case is that thepassenger in front of him occupancies the gate for a long timeand the next gate is unoccupied The location for the thirdchoice is set in front of the gates at a distance of 10m
Unlike the first choice as the pedestrian is considerableclose to the gates when he makes the second-time and thethird-time route choices he would pay more attention tothe distance between his current position and the gate (ieOAj) So the estimated walking time can be simplified to (12)What is more at that time the estimations on distance andpopulation size are relatively accurate He would have moreconfidence in his judgment and will choose the fastest pathas indicated in (13)
119881119871119894119895 =11987111198941198951015840V119894
(12)
Optimal local path for ped 119894= 119871119900119888119886119897 119875119886119905ℎ119895 | 119881119894119895 = min (1198811198941 1198811198942 sdot sdot sdot 119881119894119872)
(13)
As a passenger arrives at the gate hewill stop to press cardand then pass through When a passenger is scanning card
Journal of Advanced Transportation 9
10 m
17m
3 0m
Walk on Local Path
Walk on Global Path
Back to Global Path
First Choice Second Choice
Third Choice
Press Card
025m
Figure 9 The locations to make the multistage route choices
Table 1 Algorithm of local route planning
Input(a) A set of local path J(b) Preference of pedestrian i 120596119873119894119895 and 120596119871119894119895(c) Current speed V119894 and position (xi yi) of pedestrian i at time t
Output A suitable local path for pedestrian i at time t1 For each local path j in J do
2 estimate total walking distance sum1198711198981198941198951015840 by Equations ((4) (5)) (when pedestrian iis closed to the gatessum1198711198981198941198951015840 can be simplified to 11987111198941198951015840 in Equation (12))
3 calculate walking time 119881119871119894119895 by Equation (3)4 estimate the number of passengers queueing1198731015840119894119895 at local path j by Equation (7)5 calculate waiting time 119881119873119894119895 by Equation (6)6 calculate the estimated passing time of path j by Equation (2)7 End for8 If pedestrian i is closed enough to the ticket gates then
9 pass through the local path with minimum estimated passing time by Equation(13)
10 else calculate the probability 119875119894119895 of pedestrian i choose local path j by Equation (8)11 choose a suitable local path for pedestrian i based on 119875119894119895 and a random number12 End if
the front edge of his body is almost tangent to the entrance ofthe gate So the position of pressing card is set 025m aheadeach gate as shown in Figure 9
33 Results of Local Route Choice In order to test theproposed LRP model (the algorithm is summarized inTable 1) two experiments are carried out with the typicalscenarios (shown in Figure 4) The ratio of pedestrians withdifferent preferences is assumed as 111 The simulation lastsfor 5 minutes with 200 passengers In addition the actual
passenger flows of each gate in the two scenarios are alsoobserved in Beijing Subway at peak hours As shown inFigure 10 it indicates similar passenger distributions at eachgate in field investigations and simulation results Specificallyin the symmetric scenario most passengers go through thethree gates in the middle which are the shortest paths Whilethere is less passenger flow of the farthest gates 1 and 5 allthe 200 passengers continued to pass through the gates from12 s to 342 s and the average service level of the gates is36 personmin Similarly in the asymmetric scenario the
10 Journal of Advanced Transportation
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
Figure 10 Comparison of simulation results and survey data under symmetric layout (left) and asymmetric layout (right)
position 2
origin
position 1 position 3
destination
position 4
Waiting time(t2)
Pre-passing walking time(t1)
Post-passing walking time(t3)
Total time (t)
gate 1
gate 2
gate 3
gate 4
gate 505 m
Figure 11 Measurement positions and travel time
gates with the shortest distances (gate 4 and gate 5) have thelargest passenger flows accounting for 70 Due to the longdistance the number of passengers passed through gate 1 andgate 2 is small especially gate 1 only 4 persons passed Allpassengers passed through the gates within 10 s to 343 s
As shown in Figure 10 in the asymmetric scenario thepassenger flow of each gate exhibits a more nonuniformdistribution To gain an insight into the distribution ofpassengers with different preference the simulation results ofthe asymmetric scenario is a good case to illustrate this issueAs shown in Table 2 the distribution of the adventurous isobviously different from the others For the conserved andthe mild more than 40 percentage of the pedestrian volumepass through the nearest gate 5 and the total number ofpedestrians passing through from the two nearest paths (gate4 and 5) accounts for more than 70 In contrast most ofthe adventurous pass through gate 3 and 4 rather than thenearest gate 5 This is thanks to the fact that the nearest gate5 is always occupied by the conserved and the mild As a
result in order to avoid congestion the adventurous have topass through the farther gates In addition there are a fewof adventurous pedestrians pass through gate 1 the farthestpath However the conserved and the mild almost neverchoose gate 1 Therefore in the condition of a large numberof passengers passing through ticket gates the adventurouswould make an important contribution to the balance offacilities utilization
34 Passing Time To clarify the effects of passenger prefer-ence on local route decision-making we set four positions torecord the travel time for each pedestrian during simulationAs shown in Figure 11 the first position is the origin pointThe second is 05-metre ahead to the gatesThe third positionis at the front edge of gates where passengers are just walkinginto the gates The last position is the destination of pathThen four periods of time could be defined Specificallywaiting time (1199052) is the period for a passenger walking fromposition 2 to position 3 It includes the time of walking
Journal of Advanced Transportation 11
Table 2 Results of local route choice for different passengers
Temperament gate1 gate 2 gate 3 gate 4 gate 5 Totaladventurous 4 12 28 31 24 100 67 pconserved 1 9 17 31 41 100 70 pmild 0 5 21 32 43 100 63 pTotal 2 9 22 32 36 100 200 p
150
155
160
165
adventurous conserved mild
Tota
l Tim
e (s)
180
185
190
195
200
adventurous conserved mild
Wai
ting
Tim
e (s)
70
73
76
79
adventurous conserved mild
Pre-
pass
ing
Wal
king
Tim
e (s)
55
60
65
70
adventurous conserved mild
Post-
pass
ing
Wal
king
Tim
e (s)
Figure 12 The passing times for different passengers
scanning card and queuing up ldquoPrepassing walking timerdquo(1199051) is the time taken to reach position 2 from the originand ldquopostpassing walking timerdquo (1199053) is the time spent fromposition 3 to the destinationThe total time spent in thewholejourney from origin to destination is defined as t
As the expected speed and scan-card time of differentpedestrians follow the same distribution the walking dis-tances and queuing time of pedestrians can be compared
using the four time periods In the same way take theresults of the asymmetric scenario for example As shownin Figure 12 the conserved pedestrians who prefer to wait ata congested gate spend more time on waiting and less timeon walking And for the pedestrians avoiding congestion theresults are completely the opposite For the mild the timethey spend and the distance they traveled at each stage arealways at the middle level In particular the adventurous
12 Journal of Advanced Transportation
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
Figure 13 Four simulation cases with different choice preferences under symmetric layout (left) and asymmetric layout (right)
Table 3 The values of MD for different passengers
MD adventurous conserved mild Totalsymmetric layout 40 56 30 36asymmetric layout 28 48 36 28
passengers have the longest walking time (786 s beforepassing and 673 s after passing) and the shortest waitingtime (186 s) This is in consistent with the hypothesis thatthey prefer to farther path to avoid queuing On the contrarythe conserved passengers have the longest waiting time (194s) but get to the destination faster by walking the shortestdistance (total time is 1526 s) Although the adventurouswait 008s less time than the conserved they walk for 127smore than the conserved As a consequence the adventurousspend 090 s on the whole journey more than the conservedon average This is a kind of ldquofast is slowrdquo phenomenonWith the given population size and passengerrsquos compositionfrom an individualrsquos perspective it seems that waiting andpassing through the near paths is the most time-savingstrategy
35 Individual Preference The three kinds of personalityin this paper actually map different choice preferences Inorder to further investigate the differences among themfour simulation cases are established In the first three casesall pedestrians have the same character In this way theperformance of a kind of passengers can be revealed solelywithout interference from other types of passengers As acomparison each pedestrian in Case 4 would have one ofthe three choice preferences randomly while the passenger
volume stays the same Tohighlight the impact of preferencesthe passenger load in the four cases is triple as much asthe normal situation The passenger flow passed througheach gate is shown in Figure 13 In the four cases of thesymmetric scenario there are small passenger flow of the twomarginal gates (gate 1 and 5) Meanwhile the adventurousdisplay a better balance at the three middle gates and themildachieve a suboptimal balance whereas the passenger size ofthe conserved pass through the middle gate 3 is significantlyhigher than other cases In the asymmetric scenario Case 2(only the conserved) and Case 3 (only the mild) have similarresults the shorter distance a path is the more passengerspass through However Case 1 (only the adventurous) has adifferent performance the passenger population of each gateis much better balanced Except for the farthest gate 1 theproportions of the adventurous pass through each gate arealmost the same
To evaluate the passenger distribution the mean devi-ation (MD Equation (14)) is introduced as a coefficient ofuniformity The evaluation results are shown in Table 3 Alarger value of MDmeans a more uneven distribution of pas-sengers at each gate and a poorer utilization of the facilitiesFor instance in the symmetric scenario there is a seriouslynonuniform distribution of the conserved passengers withthe biggest value ofMD (56) In the asymmetric scenario theMD value of the adventurous is the smallest and the facilities
Journal of Advanced Transportation 13
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
Prop
ortio
n
Prop
ortio
n
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
Figure 14 The survey data and simulation results under symmetric layout (left) and asymmetric layout (right)
are made best use in this case Although the distributions ofthe mild and the conserved are similar the mild present abetter balance than the conserved Actually the MD values ofthe conserved are the biggest in the both scenarios and theyare not conducive to make full utilization of facilities
Interestingly with mixed choice preferences Case 4 ismore in line with the practical condition Both in thesymmetric and asymmetric scenarios Case 4 could achievewell balanced distributions Furthermore by a comparisonwith the simulation results in Section 33 (Figure 10) itcan be found that with the increased population size thedistribution of passenger flow of each gate is more balancedand as a result the facility utilization is improved
MD = 1119873119872sum119895=1
10038161003816100381610038161003816119909119895 minus 11990910038161003816100381610038161003816 (14)
where (1199091 119909119895 119909119872) is the proportion of passengerspassing through each gate obtained in an experiment 119909 is theaverage value
4 Simulation Experiment
In this section some experiments are carried out to showthe validity and stability of the model proposed in thispaper The techniques used to validate artificial pedestrianbehaviours can be identified as three main streams [49] thepedestrian dynamics descriptors such as the fundamentaldiagram the real data to validate the output of the modelsor simulation systems and the visual realism and the way ahumanobserver perceives in a simulationDue to the fact that
the main contributions of this paper focus on the mesoleveland macrolevel we verified our model with the latter twotechniques
41 Simulation of LRP Model As the core content of thelayered navigation algorithm the performance of the localroute planning model determines the practical value of thenavigation algorithm As mentioned in the part of introduc-tion there are three kinds of alternative methods of nodeselection behaviour They are based on utility probabilityand Logit model respectively Among each kind of methoda typical one with good performance is selected to comparewith our LRP model and the field data The comparedmethods were clearly stated in the literature and can bereproduced Compared with the above models the LRPmodel proposed in this paper makes further consideration ofpedestriansrsquo preferences the process and motivation to makechoice and the uncertainties underlying in estimation andselection
With the two typical layout scenarios of ticket gates thesimulation results are shown inFigure 14 In each experimentthe passenger size is the same as the survey It can beseen that the results of the LRP model in this paper havebetter performance than the other methods especially in thesymmetric scenario The simulation results can be evaluatedby the mean relative error (MRE) expressed as Equation (15)The errors of different methods are indicated in Table 4Withthe least values of MRE in both typical scenarios the LRPmodel in this research is the best method to describe thenode selection behaviour of ticket gates By the LRP model
14 Journal of Advanced Transportation
Table 4 The values of MRE by different algorithms
MRE This Research Shuaib M M 2018 [7] Li Y et al 2017 [16] Zheng X et al 2015 [11]symmetric layout 033 063 063 051asymmetric layout 029 038 043 035
Figure 15 A screenshot of the simulation process
we proposed the difference between the simulation resultsand the field data is reduced
MRE = 1119873119873sum119895=1
10038161003816100381610038161003816119909119895 minus 1199090119895 100381610038161003816100381610038161199090119895 (15)
where (1199091 119909119895 119909119873) is the proportion of passengers pass-ing through each gate obtained by simulation (11990901 1199090119895 1199090119873) is the proportion of the field data
42 Simulation of Layered Navigation Model In the layerednavigation algorithm of this paper the global path can bemodified by the local route planning in real time according tothe dynamic environment It performs well in simulating theself-optimizing path choice behaviour of passengers in realworld Firstly in order to illustrate the optimization functionof the LRP model in the layered navigation algorithm twoexperiments are carried out to simulate the movementsof passengers at the hall in a subway station In the firstexperiment agents are only guided by the global routeWhilein the other experiment the local route planning can beactivated according to dynamic environment
Take Qianmen Station on Line 8 of the Beijing Subwayas a case Four groups of passengers are loaded into eachexperiment Passengers could enter the station from theupper-left and the lower-right entrances Their arrival rate isassumed to follow a Poisson distribution with an average of50 persons per minute The passengers getting off a train willleave from the two exits located in the upper-right and thelower-left corner of the station Alighting passengers showa pulse distribution as the train arrives The trains wouldarrive at an interval of 2 minutes There are sixty alightingpassengers who would continue to reach the ticket gates inone minute
The experiments are carried out by the simulation tool wedeveloped According to the framework shown in Figure 3the static global routes for each passenger group are firstly
generated by an ldquoinitialization routerdquo module They areshown as the red polylines in Figure 15 Due to the similaractivity planning of pedestrians in a subway station it isreasonable to make the same global route for the pedestrianswhohave the sameODpair In particular the local route areasshown in Figure 5 should be set for the places needing localroute choice For example when a pedestrian gets to the ticketgate the local route plan will be activated Figure 15 shows ascreenshot after the simulation running for 54 seconds Thered ellipses represent agents
The level of service (LOS) is an important criterion toevaluate a metro station LOS is introduced by Fruin [50]to assess pedestrian facilities for the first time Based onthat Transit Capacity and Quality of Service Manual takesthe comfort and convenience of pedestrian into account andput forward a method to assessment the LOS as shown inTable 5 By the ldquocluster display moderdquo of our simulation toolthe LOS of local area can be marked in the map duringsimulation Figure 16 displays the screenshots of simulationIn Figure 16(a) passengers just walk along the global routeand do not consider local congestion This caused the crowd-edness at the entrance of the ticket gates and escalators Atthese places the LOS is always at level E In contrast whenthe agents can respond to dynamic surroundings by the localroute algorithm the congestions at bottleneck locations arerelieved effectively and the LOS is decreased in all local areasIn most cases the LOS is not above level C Level E onlyappears occasionally for a short time and could be adjustedby the self-organization of pedestrians quickly In conclusionthe model just based on the global route generates unrealisticbehaviour in the case of congestion However the modelincluding the LRP allows describing the redistribution of thepedestrians over the gates
In order to further demonstrate the effect of the hybridnavigation algorithm proposed in this paper we also simu-late the passenger movements in the above subway stationby commercial software VISSIM It is widely used in theresearch of pedestrian simulation The settings of building
Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 7
A2
A3
A1
L1 L2 L3
Influence zoneConcentration zone Ticket gates
O
D
B2
B3
B1I
II
III
Figure 5 Illustration of local route algorithm
000
005
010
015
1 2 3 4 5service time (s)
perc
enta
ge (
)
000
004
008
012
016percentage
Figure 6 The service time of ticket gate based on field survey
and evening rush hour passengersrsquo arriving rate at the gatearea is subject to Poisson distribution (Equation (10)) Theaverage number of passengers is 40 per minute The desiredspeed ranges from 08ms to 15ms
119875 (119883 = 119896) = 120582119896119896 ∙ exp (minus120582) 119896 = 0 1 sdot sdot sdot (10)
where119883 is the arrival interval P is the probability and 120582 is aparameter
The value of service time 1199050 in (6) can be measured bythe interval between two passengers entering or leaving acertain ticket gate Some investigations are carried out insubway stations at morning peak on weekdaysThere is heavypassenger traffic during these periods and the passengersare always in a rush to go to work In the investigation werecorded the time interval between passengers leaving theend of the gate (point Bi in Figure 5) and the results areshown in Figure 6 It is observed that the service time for apedestrian obeys a positive skewness distribution It rangesfrom 08 s to 37 s and the mean value is 20 s So the value of1199050 in (6) can be regard as 2 seconds
The time for a passenger passing through the gate (frompoint Ai to Bi in Figure 5) is also observed in survey Theresults are shown in Figure 7 More than 80 passengers cango throughAiBi within 15 ssim 29 s and the average is 24 sThelength of a gate is 14m According to this the average speed
of a passenger passing through the gate can be obtainedAs shown in Figure 7(a) the distribution of passing speedpresents a normal distribution with an average of 065msInterestingly there is a long tail of the distribution of thepassing time (Figure 7(a)) and it disappears by transformingto speed (Figure 7(b))
In terms of time perception the passengers in a subwaystation can be summarized into three types The first one isadventurous They are active and more annoyed with time-waste of standing in a long queue than taking detour for afaster pass So their VOT of waiting time is greater Indeedcommuters in morning peak and passengers who are pressedfor time to catch a train or a flight are usually adventurousIn addition passengers who have higher requirements for acomfortable walking environment are more willing to choosea far path to avoid crowd they are also adventurous Thesecond type is the conservative such as the elderly Becauseof their difficulty in moving and other reasons they prefera path with shorter walking distance and without bypass Intheir views waiting is much more convenient than walkingaround In this case the VOT of walking time is 12 and ofwaiting time is 08 [48] For some mild passengers thereis no preference of waiting and walking and both couldbe interpreted as ldquonormalrdquo time Their perceived time isequivalent to the real time and the VOT is 1 The perceivedweights in (2) can be valued as (11) These values are alsoreferred to simulation experiments It is the best scheme tokeep the simulation results consistent with actual situation
120596119873119894 = 12120596119871119894 = 08
if temperament is adventurous
120596119873119894 = 08120596119871119894 = 12
if temperament is conserved
120596119873119894 = 10120596119871119894 = 10
if temperament is mild
(11)
8 Journal of Advanced Transportation
000
005
010
015
020
025
2 4 6passing time (s)
perc
enta
ge (
)
000
005
010
015
020
percent
(a)
00
01
02
025 050 075 100passing speed (ms)
perc
enta
ge (
)
005010015020025
percent
(b)
Figure 7 (a)The time of passing through a gate based on field survey and (b) the calculated passing speed
000
005
010
015
0 2 4 6
feeding time (s)
perc
enta
ge (
)
000
005
010
percent
Figure 8 The feeding time based on field survey
To pass through the ticket gate a special activity must beperformedmdashto check the card Due to individual habit andthe familiarity with subway the card feeding time of eachpassenger would be different In most cases scanning timeranges from 05 s to 20 s and the average value is 11s asshown in Figure 8 Occasionally some greater feeding timecan be observed because of a failure to prepare the smart cardin advance and improper operation The maximum value weobserved during rush hour is 738 s
The movement of passengers in subway stations and thesituations of passing through the ticket gates are also recordedin field survey the details will be mentioned in the followingsections
32 Multistage Route Choice Scheme Local path selection isa dynamic process The volume of passengers at each gateis time-varying and the utility value of each local path isalso changing When a pedestrian realizes that the utilityvalue of his original choice obviously increased or thatanother path is obviously superior to the original one hewill reevaluate the utility of each path and may change hischoice To solve the problem of reselection some studiesupdated the selection choice at each time step [8] Howeverthis leads to a pingndashpong effect [9] This drawback can be
corrected by using inertial system and relaxation processesWith the inertial system a new selection will be adoptedonly when it gains a certain increment in contrast to the oldselection [7]With relaxation processes the selection updatesin a given time interval such as 10 seconds [14 16] Thesemethods can achieve good results under certain conditionsHowever in a subway system it is difficult to determine anappropriate threshold for the inertial system and a time inter-val of reselection for the time-based relaxation processesFortunately according to field studies the selection processof passing through ticket gates can be abstracted into threestages (Figure 9) Firstly a pedestrian generally begins toconsider which gate is suitable and make a decision in frontof the gates with a distance of 30m Then he moves towardsthe target gate and always pays attention to the surroundingsIn most cases if necessary a selection change would be madein front of the gates with a distance of 17m Next when he isclose to the gate and prepares to check the card in one case hemay change his choice for the third time The case is that thepassenger in front of him occupancies the gate for a long timeand the next gate is unoccupied The location for the thirdchoice is set in front of the gates at a distance of 10m
Unlike the first choice as the pedestrian is considerableclose to the gates when he makes the second-time and thethird-time route choices he would pay more attention tothe distance between his current position and the gate (ieOAj) So the estimated walking time can be simplified to (12)What is more at that time the estimations on distance andpopulation size are relatively accurate He would have moreconfidence in his judgment and will choose the fastest pathas indicated in (13)
119881119871119894119895 =11987111198941198951015840V119894
(12)
Optimal local path for ped 119894= 119871119900119888119886119897 119875119886119905ℎ119895 | 119881119894119895 = min (1198811198941 1198811198942 sdot sdot sdot 119881119894119872)
(13)
As a passenger arrives at the gate hewill stop to press cardand then pass through When a passenger is scanning card
Journal of Advanced Transportation 9
10 m
17m
3 0m
Walk on Local Path
Walk on Global Path
Back to Global Path
First Choice Second Choice
Third Choice
Press Card
025m
Figure 9 The locations to make the multistage route choices
Table 1 Algorithm of local route planning
Input(a) A set of local path J(b) Preference of pedestrian i 120596119873119894119895 and 120596119871119894119895(c) Current speed V119894 and position (xi yi) of pedestrian i at time t
Output A suitable local path for pedestrian i at time t1 For each local path j in J do
2 estimate total walking distance sum1198711198981198941198951015840 by Equations ((4) (5)) (when pedestrian iis closed to the gatessum1198711198981198941198951015840 can be simplified to 11987111198941198951015840 in Equation (12))
3 calculate walking time 119881119871119894119895 by Equation (3)4 estimate the number of passengers queueing1198731015840119894119895 at local path j by Equation (7)5 calculate waiting time 119881119873119894119895 by Equation (6)6 calculate the estimated passing time of path j by Equation (2)7 End for8 If pedestrian i is closed enough to the ticket gates then
9 pass through the local path with minimum estimated passing time by Equation(13)
10 else calculate the probability 119875119894119895 of pedestrian i choose local path j by Equation (8)11 choose a suitable local path for pedestrian i based on 119875119894119895 and a random number12 End if
the front edge of his body is almost tangent to the entrance ofthe gate So the position of pressing card is set 025m aheadeach gate as shown in Figure 9
33 Results of Local Route Choice In order to test theproposed LRP model (the algorithm is summarized inTable 1) two experiments are carried out with the typicalscenarios (shown in Figure 4) The ratio of pedestrians withdifferent preferences is assumed as 111 The simulation lastsfor 5 minutes with 200 passengers In addition the actual
passenger flows of each gate in the two scenarios are alsoobserved in Beijing Subway at peak hours As shown inFigure 10 it indicates similar passenger distributions at eachgate in field investigations and simulation results Specificallyin the symmetric scenario most passengers go through thethree gates in the middle which are the shortest paths Whilethere is less passenger flow of the farthest gates 1 and 5 allthe 200 passengers continued to pass through the gates from12 s to 342 s and the average service level of the gates is36 personmin Similarly in the asymmetric scenario the
10 Journal of Advanced Transportation
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
Figure 10 Comparison of simulation results and survey data under symmetric layout (left) and asymmetric layout (right)
position 2
origin
position 1 position 3
destination
position 4
Waiting time(t2)
Pre-passing walking time(t1)
Post-passing walking time(t3)
Total time (t)
gate 1
gate 2
gate 3
gate 4
gate 505 m
Figure 11 Measurement positions and travel time
gates with the shortest distances (gate 4 and gate 5) have thelargest passenger flows accounting for 70 Due to the longdistance the number of passengers passed through gate 1 andgate 2 is small especially gate 1 only 4 persons passed Allpassengers passed through the gates within 10 s to 343 s
As shown in Figure 10 in the asymmetric scenario thepassenger flow of each gate exhibits a more nonuniformdistribution To gain an insight into the distribution ofpassengers with different preference the simulation results ofthe asymmetric scenario is a good case to illustrate this issueAs shown in Table 2 the distribution of the adventurous isobviously different from the others For the conserved andthe mild more than 40 percentage of the pedestrian volumepass through the nearest gate 5 and the total number ofpedestrians passing through from the two nearest paths (gate4 and 5) accounts for more than 70 In contrast most ofthe adventurous pass through gate 3 and 4 rather than thenearest gate 5 This is thanks to the fact that the nearest gate5 is always occupied by the conserved and the mild As a
result in order to avoid congestion the adventurous have topass through the farther gates In addition there are a fewof adventurous pedestrians pass through gate 1 the farthestpath However the conserved and the mild almost neverchoose gate 1 Therefore in the condition of a large numberof passengers passing through ticket gates the adventurouswould make an important contribution to the balance offacilities utilization
34 Passing Time To clarify the effects of passenger prefer-ence on local route decision-making we set four positions torecord the travel time for each pedestrian during simulationAs shown in Figure 11 the first position is the origin pointThe second is 05-metre ahead to the gatesThe third positionis at the front edge of gates where passengers are just walkinginto the gates The last position is the destination of pathThen four periods of time could be defined Specificallywaiting time (1199052) is the period for a passenger walking fromposition 2 to position 3 It includes the time of walking
Journal of Advanced Transportation 11
Table 2 Results of local route choice for different passengers
Temperament gate1 gate 2 gate 3 gate 4 gate 5 Totaladventurous 4 12 28 31 24 100 67 pconserved 1 9 17 31 41 100 70 pmild 0 5 21 32 43 100 63 pTotal 2 9 22 32 36 100 200 p
150
155
160
165
adventurous conserved mild
Tota
l Tim
e (s)
180
185
190
195
200
adventurous conserved mild
Wai
ting
Tim
e (s)
70
73
76
79
adventurous conserved mild
Pre-
pass
ing
Wal
king
Tim
e (s)
55
60
65
70
adventurous conserved mild
Post-
pass
ing
Wal
king
Tim
e (s)
Figure 12 The passing times for different passengers
scanning card and queuing up ldquoPrepassing walking timerdquo(1199051) is the time taken to reach position 2 from the originand ldquopostpassing walking timerdquo (1199053) is the time spent fromposition 3 to the destinationThe total time spent in thewholejourney from origin to destination is defined as t
As the expected speed and scan-card time of differentpedestrians follow the same distribution the walking dis-tances and queuing time of pedestrians can be compared
using the four time periods In the same way take theresults of the asymmetric scenario for example As shownin Figure 12 the conserved pedestrians who prefer to wait ata congested gate spend more time on waiting and less timeon walking And for the pedestrians avoiding congestion theresults are completely the opposite For the mild the timethey spend and the distance they traveled at each stage arealways at the middle level In particular the adventurous
12 Journal of Advanced Transportation
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
Figure 13 Four simulation cases with different choice preferences under symmetric layout (left) and asymmetric layout (right)
Table 3 The values of MD for different passengers
MD adventurous conserved mild Totalsymmetric layout 40 56 30 36asymmetric layout 28 48 36 28
passengers have the longest walking time (786 s beforepassing and 673 s after passing) and the shortest waitingtime (186 s) This is in consistent with the hypothesis thatthey prefer to farther path to avoid queuing On the contrarythe conserved passengers have the longest waiting time (194s) but get to the destination faster by walking the shortestdistance (total time is 1526 s) Although the adventurouswait 008s less time than the conserved they walk for 127smore than the conserved As a consequence the adventurousspend 090 s on the whole journey more than the conservedon average This is a kind of ldquofast is slowrdquo phenomenonWith the given population size and passengerrsquos compositionfrom an individualrsquos perspective it seems that waiting andpassing through the near paths is the most time-savingstrategy
35 Individual Preference The three kinds of personalityin this paper actually map different choice preferences Inorder to further investigate the differences among themfour simulation cases are established In the first three casesall pedestrians have the same character In this way theperformance of a kind of passengers can be revealed solelywithout interference from other types of passengers As acomparison each pedestrian in Case 4 would have one ofthe three choice preferences randomly while the passenger
volume stays the same Tohighlight the impact of preferencesthe passenger load in the four cases is triple as much asthe normal situation The passenger flow passed througheach gate is shown in Figure 13 In the four cases of thesymmetric scenario there are small passenger flow of the twomarginal gates (gate 1 and 5) Meanwhile the adventurousdisplay a better balance at the three middle gates and themildachieve a suboptimal balance whereas the passenger size ofthe conserved pass through the middle gate 3 is significantlyhigher than other cases In the asymmetric scenario Case 2(only the conserved) and Case 3 (only the mild) have similarresults the shorter distance a path is the more passengerspass through However Case 1 (only the adventurous) has adifferent performance the passenger population of each gateis much better balanced Except for the farthest gate 1 theproportions of the adventurous pass through each gate arealmost the same
To evaluate the passenger distribution the mean devi-ation (MD Equation (14)) is introduced as a coefficient ofuniformity The evaluation results are shown in Table 3 Alarger value of MDmeans a more uneven distribution of pas-sengers at each gate and a poorer utilization of the facilitiesFor instance in the symmetric scenario there is a seriouslynonuniform distribution of the conserved passengers withthe biggest value ofMD (56) In the asymmetric scenario theMD value of the adventurous is the smallest and the facilities
Journal of Advanced Transportation 13
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
Prop
ortio
n
Prop
ortio
n
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
Figure 14 The survey data and simulation results under symmetric layout (left) and asymmetric layout (right)
are made best use in this case Although the distributions ofthe mild and the conserved are similar the mild present abetter balance than the conserved Actually the MD values ofthe conserved are the biggest in the both scenarios and theyare not conducive to make full utilization of facilities
Interestingly with mixed choice preferences Case 4 ismore in line with the practical condition Both in thesymmetric and asymmetric scenarios Case 4 could achievewell balanced distributions Furthermore by a comparisonwith the simulation results in Section 33 (Figure 10) itcan be found that with the increased population size thedistribution of passenger flow of each gate is more balancedand as a result the facility utilization is improved
MD = 1119873119872sum119895=1
10038161003816100381610038161003816119909119895 minus 11990910038161003816100381610038161003816 (14)
where (1199091 119909119895 119909119872) is the proportion of passengerspassing through each gate obtained in an experiment 119909 is theaverage value
4 Simulation Experiment
In this section some experiments are carried out to showthe validity and stability of the model proposed in thispaper The techniques used to validate artificial pedestrianbehaviours can be identified as three main streams [49] thepedestrian dynamics descriptors such as the fundamentaldiagram the real data to validate the output of the modelsor simulation systems and the visual realism and the way ahumanobserver perceives in a simulationDue to the fact that
the main contributions of this paper focus on the mesoleveland macrolevel we verified our model with the latter twotechniques
41 Simulation of LRP Model As the core content of thelayered navigation algorithm the performance of the localroute planning model determines the practical value of thenavigation algorithm As mentioned in the part of introduc-tion there are three kinds of alternative methods of nodeselection behaviour They are based on utility probabilityand Logit model respectively Among each kind of methoda typical one with good performance is selected to comparewith our LRP model and the field data The comparedmethods were clearly stated in the literature and can bereproduced Compared with the above models the LRPmodel proposed in this paper makes further consideration ofpedestriansrsquo preferences the process and motivation to makechoice and the uncertainties underlying in estimation andselection
With the two typical layout scenarios of ticket gates thesimulation results are shown inFigure 14 In each experimentthe passenger size is the same as the survey It can beseen that the results of the LRP model in this paper havebetter performance than the other methods especially in thesymmetric scenario The simulation results can be evaluatedby the mean relative error (MRE) expressed as Equation (15)The errors of different methods are indicated in Table 4Withthe least values of MRE in both typical scenarios the LRPmodel in this research is the best method to describe thenode selection behaviour of ticket gates By the LRP model
14 Journal of Advanced Transportation
Table 4 The values of MRE by different algorithms
MRE This Research Shuaib M M 2018 [7] Li Y et al 2017 [16] Zheng X et al 2015 [11]symmetric layout 033 063 063 051asymmetric layout 029 038 043 035
Figure 15 A screenshot of the simulation process
we proposed the difference between the simulation resultsand the field data is reduced
MRE = 1119873119873sum119895=1
10038161003816100381610038161003816119909119895 minus 1199090119895 100381610038161003816100381610038161199090119895 (15)
where (1199091 119909119895 119909119873) is the proportion of passengers pass-ing through each gate obtained by simulation (11990901 1199090119895 1199090119873) is the proportion of the field data
42 Simulation of Layered Navigation Model In the layerednavigation algorithm of this paper the global path can bemodified by the local route planning in real time according tothe dynamic environment It performs well in simulating theself-optimizing path choice behaviour of passengers in realworld Firstly in order to illustrate the optimization functionof the LRP model in the layered navigation algorithm twoexperiments are carried out to simulate the movementsof passengers at the hall in a subway station In the firstexperiment agents are only guided by the global routeWhilein the other experiment the local route planning can beactivated according to dynamic environment
Take Qianmen Station on Line 8 of the Beijing Subwayas a case Four groups of passengers are loaded into eachexperiment Passengers could enter the station from theupper-left and the lower-right entrances Their arrival rate isassumed to follow a Poisson distribution with an average of50 persons per minute The passengers getting off a train willleave from the two exits located in the upper-right and thelower-left corner of the station Alighting passengers showa pulse distribution as the train arrives The trains wouldarrive at an interval of 2 minutes There are sixty alightingpassengers who would continue to reach the ticket gates inone minute
The experiments are carried out by the simulation tool wedeveloped According to the framework shown in Figure 3the static global routes for each passenger group are firstly
generated by an ldquoinitialization routerdquo module They areshown as the red polylines in Figure 15 Due to the similaractivity planning of pedestrians in a subway station it isreasonable to make the same global route for the pedestrianswhohave the sameODpair In particular the local route areasshown in Figure 5 should be set for the places needing localroute choice For example when a pedestrian gets to the ticketgate the local route plan will be activated Figure 15 shows ascreenshot after the simulation running for 54 seconds Thered ellipses represent agents
The level of service (LOS) is an important criterion toevaluate a metro station LOS is introduced by Fruin [50]to assess pedestrian facilities for the first time Based onthat Transit Capacity and Quality of Service Manual takesthe comfort and convenience of pedestrian into account andput forward a method to assessment the LOS as shown inTable 5 By the ldquocluster display moderdquo of our simulation toolthe LOS of local area can be marked in the map duringsimulation Figure 16 displays the screenshots of simulationIn Figure 16(a) passengers just walk along the global routeand do not consider local congestion This caused the crowd-edness at the entrance of the ticket gates and escalators Atthese places the LOS is always at level E In contrast whenthe agents can respond to dynamic surroundings by the localroute algorithm the congestions at bottleneck locations arerelieved effectively and the LOS is decreased in all local areasIn most cases the LOS is not above level C Level E onlyappears occasionally for a short time and could be adjustedby the self-organization of pedestrians quickly In conclusionthe model just based on the global route generates unrealisticbehaviour in the case of congestion However the modelincluding the LRP allows describing the redistribution of thepedestrians over the gates
In order to further demonstrate the effect of the hybridnavigation algorithm proposed in this paper we also simu-late the passenger movements in the above subway stationby commercial software VISSIM It is widely used in theresearch of pedestrian simulation The settings of building
Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

8 Journal of Advanced Transportation
000
005
010
015
020
025
2 4 6passing time (s)
perc
enta
ge (
)
000
005
010
015
020
percent
(a)
00
01
02
025 050 075 100passing speed (ms)
perc
enta
ge (
)
005010015020025
percent
(b)
Figure 7 (a)The time of passing through a gate based on field survey and (b) the calculated passing speed
000
005
010
015
0 2 4 6
feeding time (s)
perc
enta
ge (
)
000
005
010
percent
Figure 8 The feeding time based on field survey
To pass through the ticket gate a special activity must beperformedmdashto check the card Due to individual habit andthe familiarity with subway the card feeding time of eachpassenger would be different In most cases scanning timeranges from 05 s to 20 s and the average value is 11s asshown in Figure 8 Occasionally some greater feeding timecan be observed because of a failure to prepare the smart cardin advance and improper operation The maximum value weobserved during rush hour is 738 s
The movement of passengers in subway stations and thesituations of passing through the ticket gates are also recordedin field survey the details will be mentioned in the followingsections
32 Multistage Route Choice Scheme Local path selection isa dynamic process The volume of passengers at each gateis time-varying and the utility value of each local path isalso changing When a pedestrian realizes that the utilityvalue of his original choice obviously increased or thatanother path is obviously superior to the original one hewill reevaluate the utility of each path and may change hischoice To solve the problem of reselection some studiesupdated the selection choice at each time step [8] Howeverthis leads to a pingndashpong effect [9] This drawback can be
corrected by using inertial system and relaxation processesWith the inertial system a new selection will be adoptedonly when it gains a certain increment in contrast to the oldselection [7]With relaxation processes the selection updatesin a given time interval such as 10 seconds [14 16] Thesemethods can achieve good results under certain conditionsHowever in a subway system it is difficult to determine anappropriate threshold for the inertial system and a time inter-val of reselection for the time-based relaxation processesFortunately according to field studies the selection processof passing through ticket gates can be abstracted into threestages (Figure 9) Firstly a pedestrian generally begins toconsider which gate is suitable and make a decision in frontof the gates with a distance of 30m Then he moves towardsthe target gate and always pays attention to the surroundingsIn most cases if necessary a selection change would be madein front of the gates with a distance of 17m Next when he isclose to the gate and prepares to check the card in one case hemay change his choice for the third time The case is that thepassenger in front of him occupancies the gate for a long timeand the next gate is unoccupied The location for the thirdchoice is set in front of the gates at a distance of 10m
Unlike the first choice as the pedestrian is considerableclose to the gates when he makes the second-time and thethird-time route choices he would pay more attention tothe distance between his current position and the gate (ieOAj) So the estimated walking time can be simplified to (12)What is more at that time the estimations on distance andpopulation size are relatively accurate He would have moreconfidence in his judgment and will choose the fastest pathas indicated in (13)
119881119871119894119895 =11987111198941198951015840V119894
(12)
Optimal local path for ped 119894= 119871119900119888119886119897 119875119886119905ℎ119895 | 119881119894119895 = min (1198811198941 1198811198942 sdot sdot sdot 119881119894119872)
(13)
As a passenger arrives at the gate hewill stop to press cardand then pass through When a passenger is scanning card
Journal of Advanced Transportation 9
10 m
17m
3 0m
Walk on Local Path
Walk on Global Path
Back to Global Path
First Choice Second Choice
Third Choice
Press Card
025m
Figure 9 The locations to make the multistage route choices
Table 1 Algorithm of local route planning
Input(a) A set of local path J(b) Preference of pedestrian i 120596119873119894119895 and 120596119871119894119895(c) Current speed V119894 and position (xi yi) of pedestrian i at time t
Output A suitable local path for pedestrian i at time t1 For each local path j in J do
2 estimate total walking distance sum1198711198981198941198951015840 by Equations ((4) (5)) (when pedestrian iis closed to the gatessum1198711198981198941198951015840 can be simplified to 11987111198941198951015840 in Equation (12))
3 calculate walking time 119881119871119894119895 by Equation (3)4 estimate the number of passengers queueing1198731015840119894119895 at local path j by Equation (7)5 calculate waiting time 119881119873119894119895 by Equation (6)6 calculate the estimated passing time of path j by Equation (2)7 End for8 If pedestrian i is closed enough to the ticket gates then
9 pass through the local path with minimum estimated passing time by Equation(13)
10 else calculate the probability 119875119894119895 of pedestrian i choose local path j by Equation (8)11 choose a suitable local path for pedestrian i based on 119875119894119895 and a random number12 End if
the front edge of his body is almost tangent to the entrance ofthe gate So the position of pressing card is set 025m aheadeach gate as shown in Figure 9
33 Results of Local Route Choice In order to test theproposed LRP model (the algorithm is summarized inTable 1) two experiments are carried out with the typicalscenarios (shown in Figure 4) The ratio of pedestrians withdifferent preferences is assumed as 111 The simulation lastsfor 5 minutes with 200 passengers In addition the actual
passenger flows of each gate in the two scenarios are alsoobserved in Beijing Subway at peak hours As shown inFigure 10 it indicates similar passenger distributions at eachgate in field investigations and simulation results Specificallyin the symmetric scenario most passengers go through thethree gates in the middle which are the shortest paths Whilethere is less passenger flow of the farthest gates 1 and 5 allthe 200 passengers continued to pass through the gates from12 s to 342 s and the average service level of the gates is36 personmin Similarly in the asymmetric scenario the
10 Journal of Advanced Transportation
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
Figure 10 Comparison of simulation results and survey data under symmetric layout (left) and asymmetric layout (right)
position 2
origin
position 1 position 3
destination
position 4
Waiting time(t2)
Pre-passing walking time(t1)
Post-passing walking time(t3)
Total time (t)
gate 1
gate 2
gate 3
gate 4
gate 505 m
Figure 11 Measurement positions and travel time
gates with the shortest distances (gate 4 and gate 5) have thelargest passenger flows accounting for 70 Due to the longdistance the number of passengers passed through gate 1 andgate 2 is small especially gate 1 only 4 persons passed Allpassengers passed through the gates within 10 s to 343 s
As shown in Figure 10 in the asymmetric scenario thepassenger flow of each gate exhibits a more nonuniformdistribution To gain an insight into the distribution ofpassengers with different preference the simulation results ofthe asymmetric scenario is a good case to illustrate this issueAs shown in Table 2 the distribution of the adventurous isobviously different from the others For the conserved andthe mild more than 40 percentage of the pedestrian volumepass through the nearest gate 5 and the total number ofpedestrians passing through from the two nearest paths (gate4 and 5) accounts for more than 70 In contrast most ofthe adventurous pass through gate 3 and 4 rather than thenearest gate 5 This is thanks to the fact that the nearest gate5 is always occupied by the conserved and the mild As a
result in order to avoid congestion the adventurous have topass through the farther gates In addition there are a fewof adventurous pedestrians pass through gate 1 the farthestpath However the conserved and the mild almost neverchoose gate 1 Therefore in the condition of a large numberof passengers passing through ticket gates the adventurouswould make an important contribution to the balance offacilities utilization
34 Passing Time To clarify the effects of passenger prefer-ence on local route decision-making we set four positions torecord the travel time for each pedestrian during simulationAs shown in Figure 11 the first position is the origin pointThe second is 05-metre ahead to the gatesThe third positionis at the front edge of gates where passengers are just walkinginto the gates The last position is the destination of pathThen four periods of time could be defined Specificallywaiting time (1199052) is the period for a passenger walking fromposition 2 to position 3 It includes the time of walking
Journal of Advanced Transportation 11
Table 2 Results of local route choice for different passengers
Temperament gate1 gate 2 gate 3 gate 4 gate 5 Totaladventurous 4 12 28 31 24 100 67 pconserved 1 9 17 31 41 100 70 pmild 0 5 21 32 43 100 63 pTotal 2 9 22 32 36 100 200 p
150
155
160
165
adventurous conserved mild
Tota
l Tim
e (s)
180
185
190
195
200
adventurous conserved mild
Wai
ting
Tim
e (s)
70
73
76
79
adventurous conserved mild
Pre-
pass
ing
Wal
king
Tim
e (s)
55
60
65
70
adventurous conserved mild
Post-
pass
ing
Wal
king
Tim
e (s)
Figure 12 The passing times for different passengers
scanning card and queuing up ldquoPrepassing walking timerdquo(1199051) is the time taken to reach position 2 from the originand ldquopostpassing walking timerdquo (1199053) is the time spent fromposition 3 to the destinationThe total time spent in thewholejourney from origin to destination is defined as t
As the expected speed and scan-card time of differentpedestrians follow the same distribution the walking dis-tances and queuing time of pedestrians can be compared
using the four time periods In the same way take theresults of the asymmetric scenario for example As shownin Figure 12 the conserved pedestrians who prefer to wait ata congested gate spend more time on waiting and less timeon walking And for the pedestrians avoiding congestion theresults are completely the opposite For the mild the timethey spend and the distance they traveled at each stage arealways at the middle level In particular the adventurous
12 Journal of Advanced Transportation
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
Figure 13 Four simulation cases with different choice preferences under symmetric layout (left) and asymmetric layout (right)
Table 3 The values of MD for different passengers
MD adventurous conserved mild Totalsymmetric layout 40 56 30 36asymmetric layout 28 48 36 28
passengers have the longest walking time (786 s beforepassing and 673 s after passing) and the shortest waitingtime (186 s) This is in consistent with the hypothesis thatthey prefer to farther path to avoid queuing On the contrarythe conserved passengers have the longest waiting time (194s) but get to the destination faster by walking the shortestdistance (total time is 1526 s) Although the adventurouswait 008s less time than the conserved they walk for 127smore than the conserved As a consequence the adventurousspend 090 s on the whole journey more than the conservedon average This is a kind of ldquofast is slowrdquo phenomenonWith the given population size and passengerrsquos compositionfrom an individualrsquos perspective it seems that waiting andpassing through the near paths is the most time-savingstrategy
35 Individual Preference The three kinds of personalityin this paper actually map different choice preferences Inorder to further investigate the differences among themfour simulation cases are established In the first three casesall pedestrians have the same character In this way theperformance of a kind of passengers can be revealed solelywithout interference from other types of passengers As acomparison each pedestrian in Case 4 would have one ofthe three choice preferences randomly while the passenger
volume stays the same Tohighlight the impact of preferencesthe passenger load in the four cases is triple as much asthe normal situation The passenger flow passed througheach gate is shown in Figure 13 In the four cases of thesymmetric scenario there are small passenger flow of the twomarginal gates (gate 1 and 5) Meanwhile the adventurousdisplay a better balance at the three middle gates and themildachieve a suboptimal balance whereas the passenger size ofthe conserved pass through the middle gate 3 is significantlyhigher than other cases In the asymmetric scenario Case 2(only the conserved) and Case 3 (only the mild) have similarresults the shorter distance a path is the more passengerspass through However Case 1 (only the adventurous) has adifferent performance the passenger population of each gateis much better balanced Except for the farthest gate 1 theproportions of the adventurous pass through each gate arealmost the same
To evaluate the passenger distribution the mean devi-ation (MD Equation (14)) is introduced as a coefficient ofuniformity The evaluation results are shown in Table 3 Alarger value of MDmeans a more uneven distribution of pas-sengers at each gate and a poorer utilization of the facilitiesFor instance in the symmetric scenario there is a seriouslynonuniform distribution of the conserved passengers withthe biggest value ofMD (56) In the asymmetric scenario theMD value of the adventurous is the smallest and the facilities
Journal of Advanced Transportation 13
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
Prop
ortio
n
Prop
ortio
n
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
Figure 14 The survey data and simulation results under symmetric layout (left) and asymmetric layout (right)
are made best use in this case Although the distributions ofthe mild and the conserved are similar the mild present abetter balance than the conserved Actually the MD values ofthe conserved are the biggest in the both scenarios and theyare not conducive to make full utilization of facilities
Interestingly with mixed choice preferences Case 4 ismore in line with the practical condition Both in thesymmetric and asymmetric scenarios Case 4 could achievewell balanced distributions Furthermore by a comparisonwith the simulation results in Section 33 (Figure 10) itcan be found that with the increased population size thedistribution of passenger flow of each gate is more balancedand as a result the facility utilization is improved
MD = 1119873119872sum119895=1
10038161003816100381610038161003816119909119895 minus 11990910038161003816100381610038161003816 (14)
where (1199091 119909119895 119909119872) is the proportion of passengerspassing through each gate obtained in an experiment 119909 is theaverage value
4 Simulation Experiment
In this section some experiments are carried out to showthe validity and stability of the model proposed in thispaper The techniques used to validate artificial pedestrianbehaviours can be identified as three main streams [49] thepedestrian dynamics descriptors such as the fundamentaldiagram the real data to validate the output of the modelsor simulation systems and the visual realism and the way ahumanobserver perceives in a simulationDue to the fact that
the main contributions of this paper focus on the mesoleveland macrolevel we verified our model with the latter twotechniques
41 Simulation of LRP Model As the core content of thelayered navigation algorithm the performance of the localroute planning model determines the practical value of thenavigation algorithm As mentioned in the part of introduc-tion there are three kinds of alternative methods of nodeselection behaviour They are based on utility probabilityand Logit model respectively Among each kind of methoda typical one with good performance is selected to comparewith our LRP model and the field data The comparedmethods were clearly stated in the literature and can bereproduced Compared with the above models the LRPmodel proposed in this paper makes further consideration ofpedestriansrsquo preferences the process and motivation to makechoice and the uncertainties underlying in estimation andselection
With the two typical layout scenarios of ticket gates thesimulation results are shown inFigure 14 In each experimentthe passenger size is the same as the survey It can beseen that the results of the LRP model in this paper havebetter performance than the other methods especially in thesymmetric scenario The simulation results can be evaluatedby the mean relative error (MRE) expressed as Equation (15)The errors of different methods are indicated in Table 4Withthe least values of MRE in both typical scenarios the LRPmodel in this research is the best method to describe thenode selection behaviour of ticket gates By the LRP model
14 Journal of Advanced Transportation
Table 4 The values of MRE by different algorithms
MRE This Research Shuaib M M 2018 [7] Li Y et al 2017 [16] Zheng X et al 2015 [11]symmetric layout 033 063 063 051asymmetric layout 029 038 043 035
Figure 15 A screenshot of the simulation process
we proposed the difference between the simulation resultsand the field data is reduced
MRE = 1119873119873sum119895=1
10038161003816100381610038161003816119909119895 minus 1199090119895 100381610038161003816100381610038161199090119895 (15)
where (1199091 119909119895 119909119873) is the proportion of passengers pass-ing through each gate obtained by simulation (11990901 1199090119895 1199090119873) is the proportion of the field data
42 Simulation of Layered Navigation Model In the layerednavigation algorithm of this paper the global path can bemodified by the local route planning in real time according tothe dynamic environment It performs well in simulating theself-optimizing path choice behaviour of passengers in realworld Firstly in order to illustrate the optimization functionof the LRP model in the layered navigation algorithm twoexperiments are carried out to simulate the movementsof passengers at the hall in a subway station In the firstexperiment agents are only guided by the global routeWhilein the other experiment the local route planning can beactivated according to dynamic environment
Take Qianmen Station on Line 8 of the Beijing Subwayas a case Four groups of passengers are loaded into eachexperiment Passengers could enter the station from theupper-left and the lower-right entrances Their arrival rate isassumed to follow a Poisson distribution with an average of50 persons per minute The passengers getting off a train willleave from the two exits located in the upper-right and thelower-left corner of the station Alighting passengers showa pulse distribution as the train arrives The trains wouldarrive at an interval of 2 minutes There are sixty alightingpassengers who would continue to reach the ticket gates inone minute
The experiments are carried out by the simulation tool wedeveloped According to the framework shown in Figure 3the static global routes for each passenger group are firstly
generated by an ldquoinitialization routerdquo module They areshown as the red polylines in Figure 15 Due to the similaractivity planning of pedestrians in a subway station it isreasonable to make the same global route for the pedestrianswhohave the sameODpair In particular the local route areasshown in Figure 5 should be set for the places needing localroute choice For example when a pedestrian gets to the ticketgate the local route plan will be activated Figure 15 shows ascreenshot after the simulation running for 54 seconds Thered ellipses represent agents
The level of service (LOS) is an important criterion toevaluate a metro station LOS is introduced by Fruin [50]to assess pedestrian facilities for the first time Based onthat Transit Capacity and Quality of Service Manual takesthe comfort and convenience of pedestrian into account andput forward a method to assessment the LOS as shown inTable 5 By the ldquocluster display moderdquo of our simulation toolthe LOS of local area can be marked in the map duringsimulation Figure 16 displays the screenshots of simulationIn Figure 16(a) passengers just walk along the global routeand do not consider local congestion This caused the crowd-edness at the entrance of the ticket gates and escalators Atthese places the LOS is always at level E In contrast whenthe agents can respond to dynamic surroundings by the localroute algorithm the congestions at bottleneck locations arerelieved effectively and the LOS is decreased in all local areasIn most cases the LOS is not above level C Level E onlyappears occasionally for a short time and could be adjustedby the self-organization of pedestrians quickly In conclusionthe model just based on the global route generates unrealisticbehaviour in the case of congestion However the modelincluding the LRP allows describing the redistribution of thepedestrians over the gates
In order to further demonstrate the effect of the hybridnavigation algorithm proposed in this paper we also simu-late the passenger movements in the above subway stationby commercial software VISSIM It is widely used in theresearch of pedestrian simulation The settings of building
Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 9
10 m
17m
3 0m
Walk on Local Path
Walk on Global Path
Back to Global Path
First Choice Second Choice
Third Choice
Press Card
025m
Figure 9 The locations to make the multistage route choices
Table 1 Algorithm of local route planning
Input(a) A set of local path J(b) Preference of pedestrian i 120596119873119894119895 and 120596119871119894119895(c) Current speed V119894 and position (xi yi) of pedestrian i at time t
Output A suitable local path for pedestrian i at time t1 For each local path j in J do
2 estimate total walking distance sum1198711198981198941198951015840 by Equations ((4) (5)) (when pedestrian iis closed to the gatessum1198711198981198941198951015840 can be simplified to 11987111198941198951015840 in Equation (12))
3 calculate walking time 119881119871119894119895 by Equation (3)4 estimate the number of passengers queueing1198731015840119894119895 at local path j by Equation (7)5 calculate waiting time 119881119873119894119895 by Equation (6)6 calculate the estimated passing time of path j by Equation (2)7 End for8 If pedestrian i is closed enough to the ticket gates then
9 pass through the local path with minimum estimated passing time by Equation(13)
10 else calculate the probability 119875119894119895 of pedestrian i choose local path j by Equation (8)11 choose a suitable local path for pedestrian i based on 119875119894119895 and a random number12 End if
the front edge of his body is almost tangent to the entrance ofthe gate So the position of pressing card is set 025m aheadeach gate as shown in Figure 9
33 Results of Local Route Choice In order to test theproposed LRP model (the algorithm is summarized inTable 1) two experiments are carried out with the typicalscenarios (shown in Figure 4) The ratio of pedestrians withdifferent preferences is assumed as 111 The simulation lastsfor 5 minutes with 200 passengers In addition the actual
passenger flows of each gate in the two scenarios are alsoobserved in Beijing Subway at peak hours As shown inFigure 10 it indicates similar passenger distributions at eachgate in field investigations and simulation results Specificallyin the symmetric scenario most passengers go through thethree gates in the middle which are the shortest paths Whilethere is less passenger flow of the farthest gates 1 and 5 allthe 200 passengers continued to pass through the gates from12 s to 342 s and the average service level of the gates is36 personmin Similarly in the asymmetric scenario the
10 Journal of Advanced Transportation
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
Figure 10 Comparison of simulation results and survey data under symmetric layout (left) and asymmetric layout (right)
position 2
origin
position 1 position 3
destination
position 4
Waiting time(t2)
Pre-passing walking time(t1)
Post-passing walking time(t3)
Total time (t)
gate 1
gate 2
gate 3
gate 4
gate 505 m
Figure 11 Measurement positions and travel time
gates with the shortest distances (gate 4 and gate 5) have thelargest passenger flows accounting for 70 Due to the longdistance the number of passengers passed through gate 1 andgate 2 is small especially gate 1 only 4 persons passed Allpassengers passed through the gates within 10 s to 343 s
As shown in Figure 10 in the asymmetric scenario thepassenger flow of each gate exhibits a more nonuniformdistribution To gain an insight into the distribution ofpassengers with different preference the simulation results ofthe asymmetric scenario is a good case to illustrate this issueAs shown in Table 2 the distribution of the adventurous isobviously different from the others For the conserved andthe mild more than 40 percentage of the pedestrian volumepass through the nearest gate 5 and the total number ofpedestrians passing through from the two nearest paths (gate4 and 5) accounts for more than 70 In contrast most ofthe adventurous pass through gate 3 and 4 rather than thenearest gate 5 This is thanks to the fact that the nearest gate5 is always occupied by the conserved and the mild As a
result in order to avoid congestion the adventurous have topass through the farther gates In addition there are a fewof adventurous pedestrians pass through gate 1 the farthestpath However the conserved and the mild almost neverchoose gate 1 Therefore in the condition of a large numberof passengers passing through ticket gates the adventurouswould make an important contribution to the balance offacilities utilization
34 Passing Time To clarify the effects of passenger prefer-ence on local route decision-making we set four positions torecord the travel time for each pedestrian during simulationAs shown in Figure 11 the first position is the origin pointThe second is 05-metre ahead to the gatesThe third positionis at the front edge of gates where passengers are just walkinginto the gates The last position is the destination of pathThen four periods of time could be defined Specificallywaiting time (1199052) is the period for a passenger walking fromposition 2 to position 3 It includes the time of walking
Journal of Advanced Transportation 11
Table 2 Results of local route choice for different passengers
Temperament gate1 gate 2 gate 3 gate 4 gate 5 Totaladventurous 4 12 28 31 24 100 67 pconserved 1 9 17 31 41 100 70 pmild 0 5 21 32 43 100 63 pTotal 2 9 22 32 36 100 200 p
150
155
160
165
adventurous conserved mild
Tota
l Tim
e (s)
180
185
190
195
200
adventurous conserved mild
Wai
ting
Tim
e (s)
70
73
76
79
adventurous conserved mild
Pre-
pass
ing
Wal
king
Tim
e (s)
55
60
65
70
adventurous conserved mild
Post-
pass
ing
Wal
king
Tim
e (s)
Figure 12 The passing times for different passengers
scanning card and queuing up ldquoPrepassing walking timerdquo(1199051) is the time taken to reach position 2 from the originand ldquopostpassing walking timerdquo (1199053) is the time spent fromposition 3 to the destinationThe total time spent in thewholejourney from origin to destination is defined as t
As the expected speed and scan-card time of differentpedestrians follow the same distribution the walking dis-tances and queuing time of pedestrians can be compared
using the four time periods In the same way take theresults of the asymmetric scenario for example As shownin Figure 12 the conserved pedestrians who prefer to wait ata congested gate spend more time on waiting and less timeon walking And for the pedestrians avoiding congestion theresults are completely the opposite For the mild the timethey spend and the distance they traveled at each stage arealways at the middle level In particular the adventurous
12 Journal of Advanced Transportation
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
Figure 13 Four simulation cases with different choice preferences under symmetric layout (left) and asymmetric layout (right)
Table 3 The values of MD for different passengers
MD adventurous conserved mild Totalsymmetric layout 40 56 30 36asymmetric layout 28 48 36 28
passengers have the longest walking time (786 s beforepassing and 673 s after passing) and the shortest waitingtime (186 s) This is in consistent with the hypothesis thatthey prefer to farther path to avoid queuing On the contrarythe conserved passengers have the longest waiting time (194s) but get to the destination faster by walking the shortestdistance (total time is 1526 s) Although the adventurouswait 008s less time than the conserved they walk for 127smore than the conserved As a consequence the adventurousspend 090 s on the whole journey more than the conservedon average This is a kind of ldquofast is slowrdquo phenomenonWith the given population size and passengerrsquos compositionfrom an individualrsquos perspective it seems that waiting andpassing through the near paths is the most time-savingstrategy
35 Individual Preference The three kinds of personalityin this paper actually map different choice preferences Inorder to further investigate the differences among themfour simulation cases are established In the first three casesall pedestrians have the same character In this way theperformance of a kind of passengers can be revealed solelywithout interference from other types of passengers As acomparison each pedestrian in Case 4 would have one ofthe three choice preferences randomly while the passenger
volume stays the same Tohighlight the impact of preferencesthe passenger load in the four cases is triple as much asthe normal situation The passenger flow passed througheach gate is shown in Figure 13 In the four cases of thesymmetric scenario there are small passenger flow of the twomarginal gates (gate 1 and 5) Meanwhile the adventurousdisplay a better balance at the three middle gates and themildachieve a suboptimal balance whereas the passenger size ofthe conserved pass through the middle gate 3 is significantlyhigher than other cases In the asymmetric scenario Case 2(only the conserved) and Case 3 (only the mild) have similarresults the shorter distance a path is the more passengerspass through However Case 1 (only the adventurous) has adifferent performance the passenger population of each gateis much better balanced Except for the farthest gate 1 theproportions of the adventurous pass through each gate arealmost the same
To evaluate the passenger distribution the mean devi-ation (MD Equation (14)) is introduced as a coefficient ofuniformity The evaluation results are shown in Table 3 Alarger value of MDmeans a more uneven distribution of pas-sengers at each gate and a poorer utilization of the facilitiesFor instance in the symmetric scenario there is a seriouslynonuniform distribution of the conserved passengers withthe biggest value ofMD (56) In the asymmetric scenario theMD value of the adventurous is the smallest and the facilities
Journal of Advanced Transportation 13
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
Prop
ortio
n
Prop
ortio
n
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
Figure 14 The survey data and simulation results under symmetric layout (left) and asymmetric layout (right)
are made best use in this case Although the distributions ofthe mild and the conserved are similar the mild present abetter balance than the conserved Actually the MD values ofthe conserved are the biggest in the both scenarios and theyare not conducive to make full utilization of facilities
Interestingly with mixed choice preferences Case 4 ismore in line with the practical condition Both in thesymmetric and asymmetric scenarios Case 4 could achievewell balanced distributions Furthermore by a comparisonwith the simulation results in Section 33 (Figure 10) itcan be found that with the increased population size thedistribution of passenger flow of each gate is more balancedand as a result the facility utilization is improved
MD = 1119873119872sum119895=1
10038161003816100381610038161003816119909119895 minus 11990910038161003816100381610038161003816 (14)
where (1199091 119909119895 119909119872) is the proportion of passengerspassing through each gate obtained in an experiment 119909 is theaverage value
4 Simulation Experiment
In this section some experiments are carried out to showthe validity and stability of the model proposed in thispaper The techniques used to validate artificial pedestrianbehaviours can be identified as three main streams [49] thepedestrian dynamics descriptors such as the fundamentaldiagram the real data to validate the output of the modelsor simulation systems and the visual realism and the way ahumanobserver perceives in a simulationDue to the fact that
the main contributions of this paper focus on the mesoleveland macrolevel we verified our model with the latter twotechniques
41 Simulation of LRP Model As the core content of thelayered navigation algorithm the performance of the localroute planning model determines the practical value of thenavigation algorithm As mentioned in the part of introduc-tion there are three kinds of alternative methods of nodeselection behaviour They are based on utility probabilityand Logit model respectively Among each kind of methoda typical one with good performance is selected to comparewith our LRP model and the field data The comparedmethods were clearly stated in the literature and can bereproduced Compared with the above models the LRPmodel proposed in this paper makes further consideration ofpedestriansrsquo preferences the process and motivation to makechoice and the uncertainties underlying in estimation andselection
With the two typical layout scenarios of ticket gates thesimulation results are shown inFigure 14 In each experimentthe passenger size is the same as the survey It can beseen that the results of the LRP model in this paper havebetter performance than the other methods especially in thesymmetric scenario The simulation results can be evaluatedby the mean relative error (MRE) expressed as Equation (15)The errors of different methods are indicated in Table 4Withthe least values of MRE in both typical scenarios the LRPmodel in this research is the best method to describe thenode selection behaviour of ticket gates By the LRP model
14 Journal of Advanced Transportation
Table 4 The values of MRE by different algorithms
MRE This Research Shuaib M M 2018 [7] Li Y et al 2017 [16] Zheng X et al 2015 [11]symmetric layout 033 063 063 051asymmetric layout 029 038 043 035
Figure 15 A screenshot of the simulation process
we proposed the difference between the simulation resultsand the field data is reduced
MRE = 1119873119873sum119895=1
10038161003816100381610038161003816119909119895 minus 1199090119895 100381610038161003816100381610038161199090119895 (15)
where (1199091 119909119895 119909119873) is the proportion of passengers pass-ing through each gate obtained by simulation (11990901 1199090119895 1199090119873) is the proportion of the field data
42 Simulation of Layered Navigation Model In the layerednavigation algorithm of this paper the global path can bemodified by the local route planning in real time according tothe dynamic environment It performs well in simulating theself-optimizing path choice behaviour of passengers in realworld Firstly in order to illustrate the optimization functionof the LRP model in the layered navigation algorithm twoexperiments are carried out to simulate the movementsof passengers at the hall in a subway station In the firstexperiment agents are only guided by the global routeWhilein the other experiment the local route planning can beactivated according to dynamic environment
Take Qianmen Station on Line 8 of the Beijing Subwayas a case Four groups of passengers are loaded into eachexperiment Passengers could enter the station from theupper-left and the lower-right entrances Their arrival rate isassumed to follow a Poisson distribution with an average of50 persons per minute The passengers getting off a train willleave from the two exits located in the upper-right and thelower-left corner of the station Alighting passengers showa pulse distribution as the train arrives The trains wouldarrive at an interval of 2 minutes There are sixty alightingpassengers who would continue to reach the ticket gates inone minute
The experiments are carried out by the simulation tool wedeveloped According to the framework shown in Figure 3the static global routes for each passenger group are firstly
generated by an ldquoinitialization routerdquo module They areshown as the red polylines in Figure 15 Due to the similaractivity planning of pedestrians in a subway station it isreasonable to make the same global route for the pedestrianswhohave the sameODpair In particular the local route areasshown in Figure 5 should be set for the places needing localroute choice For example when a pedestrian gets to the ticketgate the local route plan will be activated Figure 15 shows ascreenshot after the simulation running for 54 seconds Thered ellipses represent agents
The level of service (LOS) is an important criterion toevaluate a metro station LOS is introduced by Fruin [50]to assess pedestrian facilities for the first time Based onthat Transit Capacity and Quality of Service Manual takesthe comfort and convenience of pedestrian into account andput forward a method to assessment the LOS as shown inTable 5 By the ldquocluster display moderdquo of our simulation toolthe LOS of local area can be marked in the map duringsimulation Figure 16 displays the screenshots of simulationIn Figure 16(a) passengers just walk along the global routeand do not consider local congestion This caused the crowd-edness at the entrance of the ticket gates and escalators Atthese places the LOS is always at level E In contrast whenthe agents can respond to dynamic surroundings by the localroute algorithm the congestions at bottleneck locations arerelieved effectively and the LOS is decreased in all local areasIn most cases the LOS is not above level C Level E onlyappears occasionally for a short time and could be adjustedby the self-organization of pedestrians quickly In conclusionthe model just based on the global route generates unrealisticbehaviour in the case of congestion However the modelincluding the LRP allows describing the redistribution of thepedestrians over the gates
In order to further demonstrate the effect of the hybridnavigation algorithm proposed in this paper we also simu-late the passenger movements in the above subway stationby commercial software VISSIM It is widely used in theresearch of pedestrian simulation The settings of building
Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

10 Journal of Advanced Transportation
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
00
01
02
03
04
05
1 2 3 4 5Gate
prop
ortio
n
Field Data
Simulation Data
Figure 10 Comparison of simulation results and survey data under symmetric layout (left) and asymmetric layout (right)
position 2
origin
position 1 position 3
destination
position 4
Waiting time(t2)
Pre-passing walking time(t1)
Post-passing walking time(t3)
Total time (t)
gate 1
gate 2
gate 3
gate 4
gate 505 m
Figure 11 Measurement positions and travel time
gates with the shortest distances (gate 4 and gate 5) have thelargest passenger flows accounting for 70 Due to the longdistance the number of passengers passed through gate 1 andgate 2 is small especially gate 1 only 4 persons passed Allpassengers passed through the gates within 10 s to 343 s
As shown in Figure 10 in the asymmetric scenario thepassenger flow of each gate exhibits a more nonuniformdistribution To gain an insight into the distribution ofpassengers with different preference the simulation results ofthe asymmetric scenario is a good case to illustrate this issueAs shown in Table 2 the distribution of the adventurous isobviously different from the others For the conserved andthe mild more than 40 percentage of the pedestrian volumepass through the nearest gate 5 and the total number ofpedestrians passing through from the two nearest paths (gate4 and 5) accounts for more than 70 In contrast most ofthe adventurous pass through gate 3 and 4 rather than thenearest gate 5 This is thanks to the fact that the nearest gate5 is always occupied by the conserved and the mild As a
result in order to avoid congestion the adventurous have topass through the farther gates In addition there are a fewof adventurous pedestrians pass through gate 1 the farthestpath However the conserved and the mild almost neverchoose gate 1 Therefore in the condition of a large numberof passengers passing through ticket gates the adventurouswould make an important contribution to the balance offacilities utilization
34 Passing Time To clarify the effects of passenger prefer-ence on local route decision-making we set four positions torecord the travel time for each pedestrian during simulationAs shown in Figure 11 the first position is the origin pointThe second is 05-metre ahead to the gatesThe third positionis at the front edge of gates where passengers are just walkinginto the gates The last position is the destination of pathThen four periods of time could be defined Specificallywaiting time (1199052) is the period for a passenger walking fromposition 2 to position 3 It includes the time of walking
Journal of Advanced Transportation 11
Table 2 Results of local route choice for different passengers
Temperament gate1 gate 2 gate 3 gate 4 gate 5 Totaladventurous 4 12 28 31 24 100 67 pconserved 1 9 17 31 41 100 70 pmild 0 5 21 32 43 100 63 pTotal 2 9 22 32 36 100 200 p
150
155
160
165
adventurous conserved mild
Tota
l Tim
e (s)
180
185
190
195
200
adventurous conserved mild
Wai
ting
Tim
e (s)
70
73
76
79
adventurous conserved mild
Pre-
pass
ing
Wal
king
Tim
e (s)
55
60
65
70
adventurous conserved mild
Post-
pass
ing
Wal
king
Tim
e (s)
Figure 12 The passing times for different passengers
scanning card and queuing up ldquoPrepassing walking timerdquo(1199051) is the time taken to reach position 2 from the originand ldquopostpassing walking timerdquo (1199053) is the time spent fromposition 3 to the destinationThe total time spent in thewholejourney from origin to destination is defined as t
As the expected speed and scan-card time of differentpedestrians follow the same distribution the walking dis-tances and queuing time of pedestrians can be compared
using the four time periods In the same way take theresults of the asymmetric scenario for example As shownin Figure 12 the conserved pedestrians who prefer to wait ata congested gate spend more time on waiting and less timeon walking And for the pedestrians avoiding congestion theresults are completely the opposite For the mild the timethey spend and the distance they traveled at each stage arealways at the middle level In particular the adventurous
12 Journal of Advanced Transportation
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
Figure 13 Four simulation cases with different choice preferences under symmetric layout (left) and asymmetric layout (right)
Table 3 The values of MD for different passengers
MD adventurous conserved mild Totalsymmetric layout 40 56 30 36asymmetric layout 28 48 36 28
passengers have the longest walking time (786 s beforepassing and 673 s after passing) and the shortest waitingtime (186 s) This is in consistent with the hypothesis thatthey prefer to farther path to avoid queuing On the contrarythe conserved passengers have the longest waiting time (194s) but get to the destination faster by walking the shortestdistance (total time is 1526 s) Although the adventurouswait 008s less time than the conserved they walk for 127smore than the conserved As a consequence the adventurousspend 090 s on the whole journey more than the conservedon average This is a kind of ldquofast is slowrdquo phenomenonWith the given population size and passengerrsquos compositionfrom an individualrsquos perspective it seems that waiting andpassing through the near paths is the most time-savingstrategy
35 Individual Preference The three kinds of personalityin this paper actually map different choice preferences Inorder to further investigate the differences among themfour simulation cases are established In the first three casesall pedestrians have the same character In this way theperformance of a kind of passengers can be revealed solelywithout interference from other types of passengers As acomparison each pedestrian in Case 4 would have one ofthe three choice preferences randomly while the passenger
volume stays the same Tohighlight the impact of preferencesthe passenger load in the four cases is triple as much asthe normal situation The passenger flow passed througheach gate is shown in Figure 13 In the four cases of thesymmetric scenario there are small passenger flow of the twomarginal gates (gate 1 and 5) Meanwhile the adventurousdisplay a better balance at the three middle gates and themildachieve a suboptimal balance whereas the passenger size ofthe conserved pass through the middle gate 3 is significantlyhigher than other cases In the asymmetric scenario Case 2(only the conserved) and Case 3 (only the mild) have similarresults the shorter distance a path is the more passengerspass through However Case 1 (only the adventurous) has adifferent performance the passenger population of each gateis much better balanced Except for the farthest gate 1 theproportions of the adventurous pass through each gate arealmost the same
To evaluate the passenger distribution the mean devi-ation (MD Equation (14)) is introduced as a coefficient ofuniformity The evaluation results are shown in Table 3 Alarger value of MDmeans a more uneven distribution of pas-sengers at each gate and a poorer utilization of the facilitiesFor instance in the symmetric scenario there is a seriouslynonuniform distribution of the conserved passengers withthe biggest value ofMD (56) In the asymmetric scenario theMD value of the adventurous is the smallest and the facilities
Journal of Advanced Transportation 13
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
Prop
ortio
n
Prop
ortio
n
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
Figure 14 The survey data and simulation results under symmetric layout (left) and asymmetric layout (right)
are made best use in this case Although the distributions ofthe mild and the conserved are similar the mild present abetter balance than the conserved Actually the MD values ofthe conserved are the biggest in the both scenarios and theyare not conducive to make full utilization of facilities
Interestingly with mixed choice preferences Case 4 ismore in line with the practical condition Both in thesymmetric and asymmetric scenarios Case 4 could achievewell balanced distributions Furthermore by a comparisonwith the simulation results in Section 33 (Figure 10) itcan be found that with the increased population size thedistribution of passenger flow of each gate is more balancedand as a result the facility utilization is improved
MD = 1119873119872sum119895=1
10038161003816100381610038161003816119909119895 minus 11990910038161003816100381610038161003816 (14)
where (1199091 119909119895 119909119872) is the proportion of passengerspassing through each gate obtained in an experiment 119909 is theaverage value
4 Simulation Experiment
In this section some experiments are carried out to showthe validity and stability of the model proposed in thispaper The techniques used to validate artificial pedestrianbehaviours can be identified as three main streams [49] thepedestrian dynamics descriptors such as the fundamentaldiagram the real data to validate the output of the modelsor simulation systems and the visual realism and the way ahumanobserver perceives in a simulationDue to the fact that
the main contributions of this paper focus on the mesoleveland macrolevel we verified our model with the latter twotechniques
41 Simulation of LRP Model As the core content of thelayered navigation algorithm the performance of the localroute planning model determines the practical value of thenavigation algorithm As mentioned in the part of introduc-tion there are three kinds of alternative methods of nodeselection behaviour They are based on utility probabilityand Logit model respectively Among each kind of methoda typical one with good performance is selected to comparewith our LRP model and the field data The comparedmethods were clearly stated in the literature and can bereproduced Compared with the above models the LRPmodel proposed in this paper makes further consideration ofpedestriansrsquo preferences the process and motivation to makechoice and the uncertainties underlying in estimation andselection
With the two typical layout scenarios of ticket gates thesimulation results are shown inFigure 14 In each experimentthe passenger size is the same as the survey It can beseen that the results of the LRP model in this paper havebetter performance than the other methods especially in thesymmetric scenario The simulation results can be evaluatedby the mean relative error (MRE) expressed as Equation (15)The errors of different methods are indicated in Table 4Withthe least values of MRE in both typical scenarios the LRPmodel in this research is the best method to describe thenode selection behaviour of ticket gates By the LRP model
14 Journal of Advanced Transportation
Table 4 The values of MRE by different algorithms
MRE This Research Shuaib M M 2018 [7] Li Y et al 2017 [16] Zheng X et al 2015 [11]symmetric layout 033 063 063 051asymmetric layout 029 038 043 035
Figure 15 A screenshot of the simulation process
we proposed the difference between the simulation resultsand the field data is reduced
MRE = 1119873119873sum119895=1
10038161003816100381610038161003816119909119895 minus 1199090119895 100381610038161003816100381610038161199090119895 (15)
where (1199091 119909119895 119909119873) is the proportion of passengers pass-ing through each gate obtained by simulation (11990901 1199090119895 1199090119873) is the proportion of the field data
42 Simulation of Layered Navigation Model In the layerednavigation algorithm of this paper the global path can bemodified by the local route planning in real time according tothe dynamic environment It performs well in simulating theself-optimizing path choice behaviour of passengers in realworld Firstly in order to illustrate the optimization functionof the LRP model in the layered navigation algorithm twoexperiments are carried out to simulate the movementsof passengers at the hall in a subway station In the firstexperiment agents are only guided by the global routeWhilein the other experiment the local route planning can beactivated according to dynamic environment
Take Qianmen Station on Line 8 of the Beijing Subwayas a case Four groups of passengers are loaded into eachexperiment Passengers could enter the station from theupper-left and the lower-right entrances Their arrival rate isassumed to follow a Poisson distribution with an average of50 persons per minute The passengers getting off a train willleave from the two exits located in the upper-right and thelower-left corner of the station Alighting passengers showa pulse distribution as the train arrives The trains wouldarrive at an interval of 2 minutes There are sixty alightingpassengers who would continue to reach the ticket gates inone minute
The experiments are carried out by the simulation tool wedeveloped According to the framework shown in Figure 3the static global routes for each passenger group are firstly
generated by an ldquoinitialization routerdquo module They areshown as the red polylines in Figure 15 Due to the similaractivity planning of pedestrians in a subway station it isreasonable to make the same global route for the pedestrianswhohave the sameODpair In particular the local route areasshown in Figure 5 should be set for the places needing localroute choice For example when a pedestrian gets to the ticketgate the local route plan will be activated Figure 15 shows ascreenshot after the simulation running for 54 seconds Thered ellipses represent agents
The level of service (LOS) is an important criterion toevaluate a metro station LOS is introduced by Fruin [50]to assess pedestrian facilities for the first time Based onthat Transit Capacity and Quality of Service Manual takesthe comfort and convenience of pedestrian into account andput forward a method to assessment the LOS as shown inTable 5 By the ldquocluster display moderdquo of our simulation toolthe LOS of local area can be marked in the map duringsimulation Figure 16 displays the screenshots of simulationIn Figure 16(a) passengers just walk along the global routeand do not consider local congestion This caused the crowd-edness at the entrance of the ticket gates and escalators Atthese places the LOS is always at level E In contrast whenthe agents can respond to dynamic surroundings by the localroute algorithm the congestions at bottleneck locations arerelieved effectively and the LOS is decreased in all local areasIn most cases the LOS is not above level C Level E onlyappears occasionally for a short time and could be adjustedby the self-organization of pedestrians quickly In conclusionthe model just based on the global route generates unrealisticbehaviour in the case of congestion However the modelincluding the LRP allows describing the redistribution of thepedestrians over the gates
In order to further demonstrate the effect of the hybridnavigation algorithm proposed in this paper we also simu-late the passenger movements in the above subway stationby commercial software VISSIM It is widely used in theresearch of pedestrian simulation The settings of building
Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 11
Table 2 Results of local route choice for different passengers
Temperament gate1 gate 2 gate 3 gate 4 gate 5 Totaladventurous 4 12 28 31 24 100 67 pconserved 1 9 17 31 41 100 70 pmild 0 5 21 32 43 100 63 pTotal 2 9 22 32 36 100 200 p
150
155
160
165
adventurous conserved mild
Tota
l Tim
e (s)
180
185
190
195
200
adventurous conserved mild
Wai
ting
Tim
e (s)
70
73
76
79
adventurous conserved mild
Pre-
pass
ing
Wal
king
Tim
e (s)
55
60
65
70
adventurous conserved mild
Post-
pass
ing
Wal
king
Tim
e (s)
Figure 12 The passing times for different passengers
scanning card and queuing up ldquoPrepassing walking timerdquo(1199051) is the time taken to reach position 2 from the originand ldquopostpassing walking timerdquo (1199053) is the time spent fromposition 3 to the destinationThe total time spent in thewholejourney from origin to destination is defined as t
As the expected speed and scan-card time of differentpedestrians follow the same distribution the walking dis-tances and queuing time of pedestrians can be compared
using the four time periods In the same way take theresults of the asymmetric scenario for example As shownin Figure 12 the conserved pedestrians who prefer to wait ata congested gate spend more time on waiting and less timeon walking And for the pedestrians avoiding congestion theresults are completely the opposite For the mild the timethey spend and the distance they traveled at each stage arealways at the middle level In particular the adventurous
12 Journal of Advanced Transportation
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
Figure 13 Four simulation cases with different choice preferences under symmetric layout (left) and asymmetric layout (right)
Table 3 The values of MD for different passengers
MD adventurous conserved mild Totalsymmetric layout 40 56 30 36asymmetric layout 28 48 36 28
passengers have the longest walking time (786 s beforepassing and 673 s after passing) and the shortest waitingtime (186 s) This is in consistent with the hypothesis thatthey prefer to farther path to avoid queuing On the contrarythe conserved passengers have the longest waiting time (194s) but get to the destination faster by walking the shortestdistance (total time is 1526 s) Although the adventurouswait 008s less time than the conserved they walk for 127smore than the conserved As a consequence the adventurousspend 090 s on the whole journey more than the conservedon average This is a kind of ldquofast is slowrdquo phenomenonWith the given population size and passengerrsquos compositionfrom an individualrsquos perspective it seems that waiting andpassing through the near paths is the most time-savingstrategy
35 Individual Preference The three kinds of personalityin this paper actually map different choice preferences Inorder to further investigate the differences among themfour simulation cases are established In the first three casesall pedestrians have the same character In this way theperformance of a kind of passengers can be revealed solelywithout interference from other types of passengers As acomparison each pedestrian in Case 4 would have one ofthe three choice preferences randomly while the passenger
volume stays the same Tohighlight the impact of preferencesthe passenger load in the four cases is triple as much asthe normal situation The passenger flow passed througheach gate is shown in Figure 13 In the four cases of thesymmetric scenario there are small passenger flow of the twomarginal gates (gate 1 and 5) Meanwhile the adventurousdisplay a better balance at the three middle gates and themildachieve a suboptimal balance whereas the passenger size ofthe conserved pass through the middle gate 3 is significantlyhigher than other cases In the asymmetric scenario Case 2(only the conserved) and Case 3 (only the mild) have similarresults the shorter distance a path is the more passengerspass through However Case 1 (only the adventurous) has adifferent performance the passenger population of each gateis much better balanced Except for the farthest gate 1 theproportions of the adventurous pass through each gate arealmost the same
To evaluate the passenger distribution the mean devi-ation (MD Equation (14)) is introduced as a coefficient ofuniformity The evaluation results are shown in Table 3 Alarger value of MDmeans a more uneven distribution of pas-sengers at each gate and a poorer utilization of the facilitiesFor instance in the symmetric scenario there is a seriouslynonuniform distribution of the conserved passengers withthe biggest value ofMD (56) In the asymmetric scenario theMD value of the adventurous is the smallest and the facilities
Journal of Advanced Transportation 13
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
Prop
ortio
n
Prop
ortio
n
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
Figure 14 The survey data and simulation results under symmetric layout (left) and asymmetric layout (right)
are made best use in this case Although the distributions ofthe mild and the conserved are similar the mild present abetter balance than the conserved Actually the MD values ofthe conserved are the biggest in the both scenarios and theyare not conducive to make full utilization of facilities
Interestingly with mixed choice preferences Case 4 ismore in line with the practical condition Both in thesymmetric and asymmetric scenarios Case 4 could achievewell balanced distributions Furthermore by a comparisonwith the simulation results in Section 33 (Figure 10) itcan be found that with the increased population size thedistribution of passenger flow of each gate is more balancedand as a result the facility utilization is improved
MD = 1119873119872sum119895=1
10038161003816100381610038161003816119909119895 minus 11990910038161003816100381610038161003816 (14)
where (1199091 119909119895 119909119872) is the proportion of passengerspassing through each gate obtained in an experiment 119909 is theaverage value
4 Simulation Experiment
In this section some experiments are carried out to showthe validity and stability of the model proposed in thispaper The techniques used to validate artificial pedestrianbehaviours can be identified as three main streams [49] thepedestrian dynamics descriptors such as the fundamentaldiagram the real data to validate the output of the modelsor simulation systems and the visual realism and the way ahumanobserver perceives in a simulationDue to the fact that
the main contributions of this paper focus on the mesoleveland macrolevel we verified our model with the latter twotechniques
41 Simulation of LRP Model As the core content of thelayered navigation algorithm the performance of the localroute planning model determines the practical value of thenavigation algorithm As mentioned in the part of introduc-tion there are three kinds of alternative methods of nodeselection behaviour They are based on utility probabilityand Logit model respectively Among each kind of methoda typical one with good performance is selected to comparewith our LRP model and the field data The comparedmethods were clearly stated in the literature and can bereproduced Compared with the above models the LRPmodel proposed in this paper makes further consideration ofpedestriansrsquo preferences the process and motivation to makechoice and the uncertainties underlying in estimation andselection
With the two typical layout scenarios of ticket gates thesimulation results are shown inFigure 14 In each experimentthe passenger size is the same as the survey It can beseen that the results of the LRP model in this paper havebetter performance than the other methods especially in thesymmetric scenario The simulation results can be evaluatedby the mean relative error (MRE) expressed as Equation (15)The errors of different methods are indicated in Table 4Withthe least values of MRE in both typical scenarios the LRPmodel in this research is the best method to describe thenode selection behaviour of ticket gates By the LRP model
14 Journal of Advanced Transportation
Table 4 The values of MRE by different algorithms
MRE This Research Shuaib M M 2018 [7] Li Y et al 2017 [16] Zheng X et al 2015 [11]symmetric layout 033 063 063 051asymmetric layout 029 038 043 035
Figure 15 A screenshot of the simulation process
we proposed the difference between the simulation resultsand the field data is reduced
MRE = 1119873119873sum119895=1
10038161003816100381610038161003816119909119895 minus 1199090119895 100381610038161003816100381610038161199090119895 (15)
where (1199091 119909119895 119909119873) is the proportion of passengers pass-ing through each gate obtained by simulation (11990901 1199090119895 1199090119873) is the proportion of the field data
42 Simulation of Layered Navigation Model In the layerednavigation algorithm of this paper the global path can bemodified by the local route planning in real time according tothe dynamic environment It performs well in simulating theself-optimizing path choice behaviour of passengers in realworld Firstly in order to illustrate the optimization functionof the LRP model in the layered navigation algorithm twoexperiments are carried out to simulate the movementsof passengers at the hall in a subway station In the firstexperiment agents are only guided by the global routeWhilein the other experiment the local route planning can beactivated according to dynamic environment
Take Qianmen Station on Line 8 of the Beijing Subwayas a case Four groups of passengers are loaded into eachexperiment Passengers could enter the station from theupper-left and the lower-right entrances Their arrival rate isassumed to follow a Poisson distribution with an average of50 persons per minute The passengers getting off a train willleave from the two exits located in the upper-right and thelower-left corner of the station Alighting passengers showa pulse distribution as the train arrives The trains wouldarrive at an interval of 2 minutes There are sixty alightingpassengers who would continue to reach the ticket gates inone minute
The experiments are carried out by the simulation tool wedeveloped According to the framework shown in Figure 3the static global routes for each passenger group are firstly
generated by an ldquoinitialization routerdquo module They areshown as the red polylines in Figure 15 Due to the similaractivity planning of pedestrians in a subway station it isreasonable to make the same global route for the pedestrianswhohave the sameODpair In particular the local route areasshown in Figure 5 should be set for the places needing localroute choice For example when a pedestrian gets to the ticketgate the local route plan will be activated Figure 15 shows ascreenshot after the simulation running for 54 seconds Thered ellipses represent agents
The level of service (LOS) is an important criterion toevaluate a metro station LOS is introduced by Fruin [50]to assess pedestrian facilities for the first time Based onthat Transit Capacity and Quality of Service Manual takesthe comfort and convenience of pedestrian into account andput forward a method to assessment the LOS as shown inTable 5 By the ldquocluster display moderdquo of our simulation toolthe LOS of local area can be marked in the map duringsimulation Figure 16 displays the screenshots of simulationIn Figure 16(a) passengers just walk along the global routeand do not consider local congestion This caused the crowd-edness at the entrance of the ticket gates and escalators Atthese places the LOS is always at level E In contrast whenthe agents can respond to dynamic surroundings by the localroute algorithm the congestions at bottleneck locations arerelieved effectively and the LOS is decreased in all local areasIn most cases the LOS is not above level C Level E onlyappears occasionally for a short time and could be adjustedby the self-organization of pedestrians quickly In conclusionthe model just based on the global route generates unrealisticbehaviour in the case of congestion However the modelincluding the LRP allows describing the redistribution of thepedestrians over the gates
In order to further demonstrate the effect of the hybridnavigation algorithm proposed in this paper we also simu-late the passenger movements in the above subway stationby commercial software VISSIM It is widely used in theresearch of pedestrian simulation The settings of building
Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

12 Journal of Advanced Transportation
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
01
02
03
04
gate 1 gate 2 gate 3 gate 4 gate 5Local Path
The p
ropo
rtio
n of
peo
ple p
asse
d th
roug
h
adventurous
conserved
mild
mixed
Figure 13 Four simulation cases with different choice preferences under symmetric layout (left) and asymmetric layout (right)
Table 3 The values of MD for different passengers
MD adventurous conserved mild Totalsymmetric layout 40 56 30 36asymmetric layout 28 48 36 28
passengers have the longest walking time (786 s beforepassing and 673 s after passing) and the shortest waitingtime (186 s) This is in consistent with the hypothesis thatthey prefer to farther path to avoid queuing On the contrarythe conserved passengers have the longest waiting time (194s) but get to the destination faster by walking the shortestdistance (total time is 1526 s) Although the adventurouswait 008s less time than the conserved they walk for 127smore than the conserved As a consequence the adventurousspend 090 s on the whole journey more than the conservedon average This is a kind of ldquofast is slowrdquo phenomenonWith the given population size and passengerrsquos compositionfrom an individualrsquos perspective it seems that waiting andpassing through the near paths is the most time-savingstrategy
35 Individual Preference The three kinds of personalityin this paper actually map different choice preferences Inorder to further investigate the differences among themfour simulation cases are established In the first three casesall pedestrians have the same character In this way theperformance of a kind of passengers can be revealed solelywithout interference from other types of passengers As acomparison each pedestrian in Case 4 would have one ofthe three choice preferences randomly while the passenger
volume stays the same Tohighlight the impact of preferencesthe passenger load in the four cases is triple as much asthe normal situation The passenger flow passed througheach gate is shown in Figure 13 In the four cases of thesymmetric scenario there are small passenger flow of the twomarginal gates (gate 1 and 5) Meanwhile the adventurousdisplay a better balance at the three middle gates and themildachieve a suboptimal balance whereas the passenger size ofthe conserved pass through the middle gate 3 is significantlyhigher than other cases In the asymmetric scenario Case 2(only the conserved) and Case 3 (only the mild) have similarresults the shorter distance a path is the more passengerspass through However Case 1 (only the adventurous) has adifferent performance the passenger population of each gateis much better balanced Except for the farthest gate 1 theproportions of the adventurous pass through each gate arealmost the same
To evaluate the passenger distribution the mean devi-ation (MD Equation (14)) is introduced as a coefficient ofuniformity The evaluation results are shown in Table 3 Alarger value of MDmeans a more uneven distribution of pas-sengers at each gate and a poorer utilization of the facilitiesFor instance in the symmetric scenario there is a seriouslynonuniform distribution of the conserved passengers withthe biggest value ofMD (56) In the asymmetric scenario theMD value of the adventurous is the smallest and the facilities
Journal of Advanced Transportation 13
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
Prop
ortio
n
Prop
ortio
n
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
Figure 14 The survey data and simulation results under symmetric layout (left) and asymmetric layout (right)
are made best use in this case Although the distributions ofthe mild and the conserved are similar the mild present abetter balance than the conserved Actually the MD values ofthe conserved are the biggest in the both scenarios and theyare not conducive to make full utilization of facilities
Interestingly with mixed choice preferences Case 4 ismore in line with the practical condition Both in thesymmetric and asymmetric scenarios Case 4 could achievewell balanced distributions Furthermore by a comparisonwith the simulation results in Section 33 (Figure 10) itcan be found that with the increased population size thedistribution of passenger flow of each gate is more balancedand as a result the facility utilization is improved
MD = 1119873119872sum119895=1
10038161003816100381610038161003816119909119895 minus 11990910038161003816100381610038161003816 (14)
where (1199091 119909119895 119909119872) is the proportion of passengerspassing through each gate obtained in an experiment 119909 is theaverage value
4 Simulation Experiment
In this section some experiments are carried out to showthe validity and stability of the model proposed in thispaper The techniques used to validate artificial pedestrianbehaviours can be identified as three main streams [49] thepedestrian dynamics descriptors such as the fundamentaldiagram the real data to validate the output of the modelsor simulation systems and the visual realism and the way ahumanobserver perceives in a simulationDue to the fact that
the main contributions of this paper focus on the mesoleveland macrolevel we verified our model with the latter twotechniques
41 Simulation of LRP Model As the core content of thelayered navigation algorithm the performance of the localroute planning model determines the practical value of thenavigation algorithm As mentioned in the part of introduc-tion there are three kinds of alternative methods of nodeselection behaviour They are based on utility probabilityand Logit model respectively Among each kind of methoda typical one with good performance is selected to comparewith our LRP model and the field data The comparedmethods were clearly stated in the literature and can bereproduced Compared with the above models the LRPmodel proposed in this paper makes further consideration ofpedestriansrsquo preferences the process and motivation to makechoice and the uncertainties underlying in estimation andselection
With the two typical layout scenarios of ticket gates thesimulation results are shown inFigure 14 In each experimentthe passenger size is the same as the survey It can beseen that the results of the LRP model in this paper havebetter performance than the other methods especially in thesymmetric scenario The simulation results can be evaluatedby the mean relative error (MRE) expressed as Equation (15)The errors of different methods are indicated in Table 4Withthe least values of MRE in both typical scenarios the LRPmodel in this research is the best method to describe thenode selection behaviour of ticket gates By the LRP model
14 Journal of Advanced Transportation
Table 4 The values of MRE by different algorithms
MRE This Research Shuaib M M 2018 [7] Li Y et al 2017 [16] Zheng X et al 2015 [11]symmetric layout 033 063 063 051asymmetric layout 029 038 043 035
Figure 15 A screenshot of the simulation process
we proposed the difference between the simulation resultsand the field data is reduced
MRE = 1119873119873sum119895=1
10038161003816100381610038161003816119909119895 minus 1199090119895 100381610038161003816100381610038161199090119895 (15)
where (1199091 119909119895 119909119873) is the proportion of passengers pass-ing through each gate obtained by simulation (11990901 1199090119895 1199090119873) is the proportion of the field data
42 Simulation of Layered Navigation Model In the layerednavigation algorithm of this paper the global path can bemodified by the local route planning in real time according tothe dynamic environment It performs well in simulating theself-optimizing path choice behaviour of passengers in realworld Firstly in order to illustrate the optimization functionof the LRP model in the layered navigation algorithm twoexperiments are carried out to simulate the movementsof passengers at the hall in a subway station In the firstexperiment agents are only guided by the global routeWhilein the other experiment the local route planning can beactivated according to dynamic environment
Take Qianmen Station on Line 8 of the Beijing Subwayas a case Four groups of passengers are loaded into eachexperiment Passengers could enter the station from theupper-left and the lower-right entrances Their arrival rate isassumed to follow a Poisson distribution with an average of50 persons per minute The passengers getting off a train willleave from the two exits located in the upper-right and thelower-left corner of the station Alighting passengers showa pulse distribution as the train arrives The trains wouldarrive at an interval of 2 minutes There are sixty alightingpassengers who would continue to reach the ticket gates inone minute
The experiments are carried out by the simulation tool wedeveloped According to the framework shown in Figure 3the static global routes for each passenger group are firstly
generated by an ldquoinitialization routerdquo module They areshown as the red polylines in Figure 15 Due to the similaractivity planning of pedestrians in a subway station it isreasonable to make the same global route for the pedestrianswhohave the sameODpair In particular the local route areasshown in Figure 5 should be set for the places needing localroute choice For example when a pedestrian gets to the ticketgate the local route plan will be activated Figure 15 shows ascreenshot after the simulation running for 54 seconds Thered ellipses represent agents
The level of service (LOS) is an important criterion toevaluate a metro station LOS is introduced by Fruin [50]to assess pedestrian facilities for the first time Based onthat Transit Capacity and Quality of Service Manual takesthe comfort and convenience of pedestrian into account andput forward a method to assessment the LOS as shown inTable 5 By the ldquocluster display moderdquo of our simulation toolthe LOS of local area can be marked in the map duringsimulation Figure 16 displays the screenshots of simulationIn Figure 16(a) passengers just walk along the global routeand do not consider local congestion This caused the crowd-edness at the entrance of the ticket gates and escalators Atthese places the LOS is always at level E In contrast whenthe agents can respond to dynamic surroundings by the localroute algorithm the congestions at bottleneck locations arerelieved effectively and the LOS is decreased in all local areasIn most cases the LOS is not above level C Level E onlyappears occasionally for a short time and could be adjustedby the self-organization of pedestrians quickly In conclusionthe model just based on the global route generates unrealisticbehaviour in the case of congestion However the modelincluding the LRP allows describing the redistribution of thepedestrians over the gates
In order to further demonstrate the effect of the hybridnavigation algorithm proposed in this paper we also simu-late the passenger movements in the above subway stationby commercial software VISSIM It is widely used in theresearch of pedestrian simulation The settings of building
Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 13
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
Prop
ortio
n
Prop
ortio
n
00
01
02
03
04
05
gate 1 gate 2 gate 3 gate 4 gate 5
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
a Field Survey
b This Research
c Shuaib M M 2018
d Li YX et al 2017
e Zheng X et al 2015
Figure 14 The survey data and simulation results under symmetric layout (left) and asymmetric layout (right)
are made best use in this case Although the distributions ofthe mild and the conserved are similar the mild present abetter balance than the conserved Actually the MD values ofthe conserved are the biggest in the both scenarios and theyare not conducive to make full utilization of facilities
Interestingly with mixed choice preferences Case 4 ismore in line with the practical condition Both in thesymmetric and asymmetric scenarios Case 4 could achievewell balanced distributions Furthermore by a comparisonwith the simulation results in Section 33 (Figure 10) itcan be found that with the increased population size thedistribution of passenger flow of each gate is more balancedand as a result the facility utilization is improved
MD = 1119873119872sum119895=1
10038161003816100381610038161003816119909119895 minus 11990910038161003816100381610038161003816 (14)
where (1199091 119909119895 119909119872) is the proportion of passengerspassing through each gate obtained in an experiment 119909 is theaverage value
4 Simulation Experiment
In this section some experiments are carried out to showthe validity and stability of the model proposed in thispaper The techniques used to validate artificial pedestrianbehaviours can be identified as three main streams [49] thepedestrian dynamics descriptors such as the fundamentaldiagram the real data to validate the output of the modelsor simulation systems and the visual realism and the way ahumanobserver perceives in a simulationDue to the fact that
the main contributions of this paper focus on the mesoleveland macrolevel we verified our model with the latter twotechniques
41 Simulation of LRP Model As the core content of thelayered navigation algorithm the performance of the localroute planning model determines the practical value of thenavigation algorithm As mentioned in the part of introduc-tion there are three kinds of alternative methods of nodeselection behaviour They are based on utility probabilityand Logit model respectively Among each kind of methoda typical one with good performance is selected to comparewith our LRP model and the field data The comparedmethods were clearly stated in the literature and can bereproduced Compared with the above models the LRPmodel proposed in this paper makes further consideration ofpedestriansrsquo preferences the process and motivation to makechoice and the uncertainties underlying in estimation andselection
With the two typical layout scenarios of ticket gates thesimulation results are shown inFigure 14 In each experimentthe passenger size is the same as the survey It can beseen that the results of the LRP model in this paper havebetter performance than the other methods especially in thesymmetric scenario The simulation results can be evaluatedby the mean relative error (MRE) expressed as Equation (15)The errors of different methods are indicated in Table 4Withthe least values of MRE in both typical scenarios the LRPmodel in this research is the best method to describe thenode selection behaviour of ticket gates By the LRP model
14 Journal of Advanced Transportation
Table 4 The values of MRE by different algorithms
MRE This Research Shuaib M M 2018 [7] Li Y et al 2017 [16] Zheng X et al 2015 [11]symmetric layout 033 063 063 051asymmetric layout 029 038 043 035
Figure 15 A screenshot of the simulation process
we proposed the difference between the simulation resultsand the field data is reduced
MRE = 1119873119873sum119895=1
10038161003816100381610038161003816119909119895 minus 1199090119895 100381610038161003816100381610038161199090119895 (15)
where (1199091 119909119895 119909119873) is the proportion of passengers pass-ing through each gate obtained by simulation (11990901 1199090119895 1199090119873) is the proportion of the field data
42 Simulation of Layered Navigation Model In the layerednavigation algorithm of this paper the global path can bemodified by the local route planning in real time according tothe dynamic environment It performs well in simulating theself-optimizing path choice behaviour of passengers in realworld Firstly in order to illustrate the optimization functionof the LRP model in the layered navigation algorithm twoexperiments are carried out to simulate the movementsof passengers at the hall in a subway station In the firstexperiment agents are only guided by the global routeWhilein the other experiment the local route planning can beactivated according to dynamic environment
Take Qianmen Station on Line 8 of the Beijing Subwayas a case Four groups of passengers are loaded into eachexperiment Passengers could enter the station from theupper-left and the lower-right entrances Their arrival rate isassumed to follow a Poisson distribution with an average of50 persons per minute The passengers getting off a train willleave from the two exits located in the upper-right and thelower-left corner of the station Alighting passengers showa pulse distribution as the train arrives The trains wouldarrive at an interval of 2 minutes There are sixty alightingpassengers who would continue to reach the ticket gates inone minute
The experiments are carried out by the simulation tool wedeveloped According to the framework shown in Figure 3the static global routes for each passenger group are firstly
generated by an ldquoinitialization routerdquo module They areshown as the red polylines in Figure 15 Due to the similaractivity planning of pedestrians in a subway station it isreasonable to make the same global route for the pedestrianswhohave the sameODpair In particular the local route areasshown in Figure 5 should be set for the places needing localroute choice For example when a pedestrian gets to the ticketgate the local route plan will be activated Figure 15 shows ascreenshot after the simulation running for 54 seconds Thered ellipses represent agents
The level of service (LOS) is an important criterion toevaluate a metro station LOS is introduced by Fruin [50]to assess pedestrian facilities for the first time Based onthat Transit Capacity and Quality of Service Manual takesthe comfort and convenience of pedestrian into account andput forward a method to assessment the LOS as shown inTable 5 By the ldquocluster display moderdquo of our simulation toolthe LOS of local area can be marked in the map duringsimulation Figure 16 displays the screenshots of simulationIn Figure 16(a) passengers just walk along the global routeand do not consider local congestion This caused the crowd-edness at the entrance of the ticket gates and escalators Atthese places the LOS is always at level E In contrast whenthe agents can respond to dynamic surroundings by the localroute algorithm the congestions at bottleneck locations arerelieved effectively and the LOS is decreased in all local areasIn most cases the LOS is not above level C Level E onlyappears occasionally for a short time and could be adjustedby the self-organization of pedestrians quickly In conclusionthe model just based on the global route generates unrealisticbehaviour in the case of congestion However the modelincluding the LRP allows describing the redistribution of thepedestrians over the gates
In order to further demonstrate the effect of the hybridnavigation algorithm proposed in this paper we also simu-late the passenger movements in the above subway stationby commercial software VISSIM It is widely used in theresearch of pedestrian simulation The settings of building
Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

14 Journal of Advanced Transportation
Table 4 The values of MRE by different algorithms
MRE This Research Shuaib M M 2018 [7] Li Y et al 2017 [16] Zheng X et al 2015 [11]symmetric layout 033 063 063 051asymmetric layout 029 038 043 035
Figure 15 A screenshot of the simulation process
we proposed the difference between the simulation resultsand the field data is reduced
MRE = 1119873119873sum119895=1
10038161003816100381610038161003816119909119895 minus 1199090119895 100381610038161003816100381610038161199090119895 (15)
where (1199091 119909119895 119909119873) is the proportion of passengers pass-ing through each gate obtained by simulation (11990901 1199090119895 1199090119873) is the proportion of the field data
42 Simulation of Layered Navigation Model In the layerednavigation algorithm of this paper the global path can bemodified by the local route planning in real time according tothe dynamic environment It performs well in simulating theself-optimizing path choice behaviour of passengers in realworld Firstly in order to illustrate the optimization functionof the LRP model in the layered navigation algorithm twoexperiments are carried out to simulate the movementsof passengers at the hall in a subway station In the firstexperiment agents are only guided by the global routeWhilein the other experiment the local route planning can beactivated according to dynamic environment
Take Qianmen Station on Line 8 of the Beijing Subwayas a case Four groups of passengers are loaded into eachexperiment Passengers could enter the station from theupper-left and the lower-right entrances Their arrival rate isassumed to follow a Poisson distribution with an average of50 persons per minute The passengers getting off a train willleave from the two exits located in the upper-right and thelower-left corner of the station Alighting passengers showa pulse distribution as the train arrives The trains wouldarrive at an interval of 2 minutes There are sixty alightingpassengers who would continue to reach the ticket gates inone minute
The experiments are carried out by the simulation tool wedeveloped According to the framework shown in Figure 3the static global routes for each passenger group are firstly
generated by an ldquoinitialization routerdquo module They areshown as the red polylines in Figure 15 Due to the similaractivity planning of pedestrians in a subway station it isreasonable to make the same global route for the pedestrianswhohave the sameODpair In particular the local route areasshown in Figure 5 should be set for the places needing localroute choice For example when a pedestrian gets to the ticketgate the local route plan will be activated Figure 15 shows ascreenshot after the simulation running for 54 seconds Thered ellipses represent agents
The level of service (LOS) is an important criterion toevaluate a metro station LOS is introduced by Fruin [50]to assess pedestrian facilities for the first time Based onthat Transit Capacity and Quality of Service Manual takesthe comfort and convenience of pedestrian into account andput forward a method to assessment the LOS as shown inTable 5 By the ldquocluster display moderdquo of our simulation toolthe LOS of local area can be marked in the map duringsimulation Figure 16 displays the screenshots of simulationIn Figure 16(a) passengers just walk along the global routeand do not consider local congestion This caused the crowd-edness at the entrance of the ticket gates and escalators Atthese places the LOS is always at level E In contrast whenthe agents can respond to dynamic surroundings by the localroute algorithm the congestions at bottleneck locations arerelieved effectively and the LOS is decreased in all local areasIn most cases the LOS is not above level C Level E onlyappears occasionally for a short time and could be adjustedby the self-organization of pedestrians quickly In conclusionthe model just based on the global route generates unrealisticbehaviour in the case of congestion However the modelincluding the LRP allows describing the redistribution of thepedestrians over the gates
In order to further demonstrate the effect of the hybridnavigation algorithm proposed in this paper we also simu-late the passenger movements in the above subway stationby commercial software VISSIM It is widely used in theresearch of pedestrian simulation The settings of building
Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 15
Table 5 Service level
Service level A B C D E FPersonal space(m2p) ge33 23-33 14-23 09-14 05-09 lt05Density (pm2) le03 03 - 04 04 - 07 07 - 11 11 -20 gt20
Level
ABCDEF
(a)
LevelABCDEF
(b)
Figure 16 Mapped LOS in a station (T=26s) (a) only global route planning and (b) two-level route planning
Table 6 Comparison of local route simulation results
Average value Distance(m) Travel time(s) Speed (ms)VISSIM 19171 53449 0359the developed tool 27891 30275 0922
environment and population size are the same as Figure 15The experimental results of our tool and that of VISSIM areshown in Table 6 In our model the local route planningbased on the estimated time may increase the walkingdistance but produce faster speed and less total travel timeIn this respect the model presented in this paper has betterperformances
At the tactical level our tool realizes a dynamic feedbackand real-time planning which could improve the utilizationof facilities and reduce travel time Passengers could choosethe ticket gate rationally without crowding as shown inFigure 17(a) However although some commercial softwarehas introduced local route planning into simulation algo-rithm the effect on uniform use of facilities is not very idealIts route planning tends to be very mechanical and leads todistorted behaviour (Figure 17(b))
5 Conclusion
We presented a novel approach to deal with the problemof route planning in dynamic environments The method is
based on a seamlessly transition between global planningand local planning In order to generate a no-collisionglobal route we made a correction to the visibility graphmethod by expanding the obstacles to avoid the overlap ofpedestrianrsquos body with obstacles We have further introduceda new and effective local route planning model based onestimated passing time This approach results in smoothercrowd movement and exhibits an agentrsquos tendency to avoidcongestion that is often observed in real crowds The uncer-tainties existing in the process of node selection such as theestimation of factors the randomness of decision-makingand the subjective preferences of different passengers are fullyintegrated into the model In its application to the selection ofticket gates in subway stations the activity of card feeding isembedded The whole process of selection and reselection issimplified into three stages and the differences of passengersrsquofocuses during them are captured Compared to previousnavigation algorithms it is demonstrated that our approachhas better performances inmultipath choices during tripTheagents in our simulation could produce faster speed and lesstravel time Furthermore our model is founded on cognitivescience work on human locomotion which can be combinedwith various classical methods for navigation in dynamicenvironments and open interesting perspectives for realisticsimulation purposes
In this paper the route planning model is proposed basedon the ticket gates in subway station It can be extended
16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

16 Journal of Advanced Transportation
D
O
(a) (b)
Figure 17 A simulation snapshot by (a) our tool and (b) VISSIM
to other similar scenarios of exit selection and multipathplanning In the future the route planning model can beintegrated with other strategic and operational methods tosimulate the movement of pedestrians Moreover the routeplanning model will have potential to be applied to manyother simulation cases such as emergency evacuation anddisaster response systems
Data Availability
The empirical data used to support the findings of this studycan be found in the section of ldquoModel Application andDiscussionrdquoThe ldquosimulation resultsrdquo data used to support thefindings of this study are included within the article
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (No 71871027 and No 51578054)
References
[1] S P Hoogendoorn P Bovy and W Daamen ldquoMicroscopicpedestrian wayfinding and dynamics modellingrdquo in Proceedingsof the International Conference on Pedestrian and EvacuationDynamics pp 123ndash155 2002
[2] H Kim and S Han ldquoCrowd evacuation simulation using activeroute choicemodel based on human characteristicsrdquo SimulationModelling Practice andTheory vol 87 pp 369ndash378 2018
[3] A Cuesta O Abreu A Balboa and D Alvear ldquoReal-timeevacuation route selectionmethodology for complex buildingsrdquoFire Safety Journal vol 91 pp 947ndash954 2017
[4] PM Kielar D H Biedermann A Kneidl andA Borrmann ldquoAunified pedestrian routing model for graph-based wayfindingbuilt on cognitive principlesrdquo Transportmetrica A TransportScience vol 14 no 5 pp 406ndash432 2018
[5] F Farina D Fontanelli A Garulli A Giannitrapani and DPrattichizzo ldquoWalking ahead The headed social force modelrdquoPLoS ONE vol 12 no 1 Article ID e0169734 2017
[6] Y Hong D Li Q Wu and H Xu ldquoDynamic route networkplanning problem for emergency evacuation in restricted-space scenariosrdquo Journal of Advanced Transportation vol 2018Article ID 4295419 13 pages 2018
[7] MM Shuaib ldquoIncorporating intelligence for typical evacuationunder the threat of fire spreadingrdquo Safety Science vol 106 pp1ndash9 2018
[8] M Shuaib and Z Zainuddin ldquoIncorporating intelligence intoexit choicemodel for typical evacuationrdquo Sains Malaysiana vol46 no 10 pp 1997ndash2005 2017
[9] A U Kemloh Wagoum A Tordeux and W Liao ldquoUnder-standing human queuing behaviour at exits an empirical studyrdquoRoyal Society Open Science vol 4 no 1 Article ID 160896 2017
[10] Z Li ldquoAn emergency exits choice preference model based oncharacteristics of individual diversityrdquo Advances in MechanicalEngineering vol 9 no 4 p 168781401769354 2017
[11] X Zheng H-Y Li L-Y Meng X-Y Xu and X ChenldquoImproved social force model based on exit selection formicroscopic pedestrian simulation in subway stationrdquo Journalof Central South University vol 22 no 11 pp 4490ndash4497 2015
[12] M Tanaka D Yanagisawa and K Nishinari ldquoExclusive queue-ing model including the choice of service windowsrdquo PhysicaA Statistical Mechanics and its Applications vol 490 pp 1481ndash1492 2018
[13] R Lovreglio A Fonzone L dellrsquoOlio and D Borri ldquoA study ofherding behaviour in exit choice during emergencies based onrandom utility theoryrdquo Safety Science vol 82 pp 421ndash431 2016
[14] R-Y Guo and H-J Huang ldquoLogit-based exit choice model ofevacuation in rooms with internal obstacles andmultiple exitsrdquoChinese Physics B vol 19 no 3 Article ID 030501 2010
[15] D Duives and H Mahmassani ldquoExit choice decisions duringpedestrian evacuations of buildingsrdquo Transportation ResearchRecord no 2316 pp 84ndash94 2012
[16] Y Li H Jia J Li J Gong and K Sun ldquoPedestrian evacuationbehavior analysis and simulation in multi-exits caserdquo Interna-tional Journal of Modern Physics C vol 28 no 10 Article ID1750128 15 pages 2017
[17] B Liu H Liu H Zhang and X Qin ldquoA social force evacuationmodel driven by video datardquo Simulation Modelling Practice andTheory vol 84 pp 190ndash203 2018
[18] K Rendon Rozo J Arellana A Santander-Mercado and MJubiz-Diaz ldquoModelling building emergency evacuation plansconsidering the dynamic behaviour of pedestrians using agent-based simulationrdquo Safety Science vol 113 pp 276ndash284 2019
[19] X Chen H Li J Miao S Jiang and X Jiang ldquoA multiagent-based model for pedestrian simulation in subway stationsrdquo
Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 17
Simulation Modelling Practice and Theory vol 71 pp 134ndash1482017
[20] M Haghani and M Sarvi ldquoSocial dynamics in emergencyevacuations disentangling crowdrsquos attraction and repulsioneffectsrdquoPhysica A Statistical Mechanics and its Applications vol475 pp 24ndash34 2017
[21] M Haghani and M Sarvi ldquoStated and revealed exit choicesof pedestrian crowd evacueesrdquo Transportation Research Part BMethodological vol 95 pp 238ndash259 2017
[22] M Kinateder B Comunale and W H Warren ldquoExit choicein an emergency evacuation scenario is influenced by exitfamiliarity and neighbor behaviorrdquo Safety Science vol 106 pp170ndash175 2018
[23] M Haghani andM Sarvi ldquoHuman exit choice in crowded builtenvironments Investigating underlying behavioural differencesbetween normal egress and emergency evacuationsrdquo Fire SafetyJournal vol 85 pp 1ndash9 2016
[24] R Lovreglio A Fonzone and L dellrsquoOlio ldquoA mixed logitmodel for predicting exit choice during building evacuationsrdquoTransportation Research Part A Policy and Practice vol 92 pp59ndash75 2016
[25] X Song J Sun H Xie Q Li Z Wang and D Han ldquoChar-acteristic time based social force model improvement andexit assignment strategy for pedestrian evacuationrdquo Physica AStatistical Mechanics and its Applications vol 505 pp 530ndash5482018
[26] H Liu B Xu D Lu and G Zhang ldquoA path planning approachfor crowd evacuation in buildings based on improved artificialbee colony algorithmrdquoApplied Soft Computing vol 68 pp 360ndash376 2018
[27] R-Y Guo ldquoPotential-based dynamic pedestrian flow assign-mentrdquo Transportation Research Part C Emerging Technologiesvol 91 pp 263ndash275 2018
[28] M Stubenschrott T Matyus H Schrom-Feiertag C Koglerand S Seer ldquoRoute-choice modeling for pedestrian evacuationbased on infrastructure knowledge and personal preferencesrdquoTransportation Research Record vol 2623 no 1 pp 82ndash89 2017
[29] T Q Tang Y X Shao L Chen and H Y Shang ldquoModelingpassengersrsquo boarding behavior at the platform of high speedrailway stationrdquo Journal of Advanced Transportation vol 2017Article ID 4073583 11 pages 2017
[30] T-Q Tang Y-X Shao and L Chen ldquoModeling pedestrianmovement at the hall of high-speed railway station duringthe check-in processrdquo Physica A Statistical Mechanics and itsApplications vol 467 pp 157ndash166 2017
[31] Y Cheng and X Zheng ldquoEffect of uncertainty on cooperativebehaviors during an emergency evacuationrdquo Communicationsin Nonlinear Science andNumerical Simulation vol 66 pp 216ndash225 2019
[32] D R Bish and H D Sherali ldquoAggregate-level demand manage-ment in evacuation planningrdquo European Journal of OperationalResearch vol 224 no 1 pp 79ndash92 2013
[33] Y Lv X D Yan W Sun and Z Y Gao ldquoA risk-based methodfor planning of bus-subway corridor evacuation under hybriduncertaintiesrdquo Reliability Engineering amp System Safety vol 139pp 188ndash199 2015
[34] S P Hoogendoorn and P H L Bovy ldquoPedestrian route-choiceand activity scheduling theory and modelsrdquo TransportationResearch Part B Methodological vol 38 no 2 pp 169ndash1902004
[35] H-H Tian Y-F Wei L-Y Dong Y Xue and R-S ZhengldquoResolution of conflicts in cellular automatonevacuationmodelwith the game-theoryrdquo Physica A Statistical Mechanics and itsApplications vol 503 pp 991ndash1006 2018
[36] S Cao L Fu and W Song ldquoExit selection and pedestrianmovement in a room with two exits under fire emergencyrdquoApplied Mathematics and Computation vol 332 pp 136ndash1472018
[37] R E Tarjan ldquoA unified approach to path problemsrdquo Journal ofthe ACM vol 28 no 3 pp 577ndash593 1981
[38] N WEI Research on g1oba1route planning for virtual human[Master thesis] JiangSu University China 2007
[39] E Palma-Villalon and P Dauchez ldquoWorld representation andpath planning for a mobile robotrdquo Robotica vol 6 no 1 pp 35ndash40 1988
[40] L G Sun and Q X Shi ldquoAlgorithm of pedestriansrsquo routeplanning based on discrete potential fieldrdquo Transport Standard-ization vol 23 pp 25ndash27 2009
[41] AAbdelghany K AbdelghanyHMahmassaniH Al-Ahmadiand W Alhalabi ldquoModeling the evacuation of large-scalecrowded pedestrian facilitiesrdquo Transportation Research Recordno 2198 pp 152ndash160 2010
[42] R Lovreglio D Borri L DellrsquoOlio and A Ibeas ldquoA discretechoice model based on random utilities for exit choice inemergency evacuationsrdquo Safety Science vol 62 pp 418ndash4262014
[43] L Zhang M Liu X Wu and S M AbouRizk ldquoSimulation-based route planning for pedestrian evacuation in metro sta-tions a case studyrdquo Automation in Construction vol 71 no 2pp 430ndash442 2016
[44] MNasir C P Lim SNahavandi andDCreighton ldquoPredictionof pedestrians routes within a built environment in normalconditionsrdquo Expert Systems with Applications vol 41 no 10 pp4975ndash4988 2014
[45] W Liao A U K Wagoum and N W F Bode ldquoRoute choicein pedestrians determinants for initial choices and revisingdecisionsrdquo Journal of the Royal Society Interface vol 14 no 1272017
[46] M Haghani and M Sarvi ldquoPedestrian crowd tactical-leveldecision making during emergency evacuationsrdquo Journal ofAdvanced Transportation vol 50 no 8 pp 1870ndash1895 2016
[47] Y Han H Liu and P Moore ldquoExtended route choice modelbased on available evacuation route set and its application incrowd evacuation simulationrdquo Simulation Modelling PracticeandTheory vol 75 pp 1ndash16 2017
[48] J-J Hsu and J C Chu ldquoLong-term congestion anticipationand aversion in pedestrian simulation using floor field cellularautomatardquo Transportation Research Part C Emerging Technolo-gies vol 48 pp 195ndash211 2014
[49] F Martinez-Gil M Lozano I Garcıa-Fernandez and FFernandez ldquoModeling evaluation and scale on artificial pedes-triansrdquo ACM Computing Surveys vol 50 no 5 p 72 2017
[50] J J Fruin PedestrIan Planning and Design Metropolitan Asso-ciation of Urban Designers amp Environmental Planners 1971
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom