![Learning Nonlinear Multi-Variate Motion Dynamics for Real ...lasa.epfl.ch/publications/uploadedFiles/Humanoids... · Dynamical Systems have been successfully applied in robotics [13],](https://static.fdocuments.in/doc/165x107/5ec8b6bb18034a69c958474c/learning-nonlinear-multi-variate-motion-dynamics-for-real-lasaepflchpublicationsuploadedfileshumanoids.jpg)
Humanoids Robotics © 2015 albert-learning.com HUMANOIDS ROBOTICS.
12
Humanoids Robotics © 2015 albert- learning.com HUMANOIDS ROBOTICS
-
Upload
edmund-shaw -
Category
Documents
-
view
224 -
download
0
Transcript of Humanoids Robotics © 2015 albert-learning.com HUMANOIDS ROBOTICS.

Humanoids Robotics
© 2015 albert-learning.com
HUMANOIDS ROBOTICS

Humanoids Robotics
© 2015 albert-learning.com
HUMANOIDS ROBOTICS:
A humanoid robot is a robot with its body shape built to resemble that of the human body.

Humanoids Robotics
© 2015 albert-learning.com
VOCABULARY
resemble to be like or similar to
biomechanics the human body structure and behavior
Tactile sensor device that measures information arising from physical interaction with its environment.
sequence arrange in a particular order.
dexterous tasks the ability to use your hands skillfully

Humanoids Robotics
© 2015 albert-learning.com
PURPOSE
Humanoid robots are used as a research tool in several scientific areas.
Researchers need to understand biomechanics to build and study humanoid robots. On the other side, the attempt to the simulation of the human body leads to a better understanding of it.

Humanoids Robotics
© 2015 albert-learning.com
OBJECTIVES AND PURPOSE
Regardless of the application area, one of the common problems tackled in humanoid robotics is the understanding of human-like information processing and the underlying mechanisms of the human brain in dealing with the real world.
In 2050, a team of humanoid robots soccer players shall win against the winner of most recent World Cup. DARPA announced recently the next Grand Challenge in robotics: building robots which do things like humans in a world made for humans.

Humanoids Robotics
© 2015 albert-learning.com
A FULLY-FLEDGED HUMANOID ROBOT WILL INCORPORATE WORK FROM EACH OF THE AREAS BELOW.
PERCEPTION:
This area includes computer vision as well as a great variety of other sensing modalities including taste, smell, sonar, IR, haptic feedback, tactile sensors, and range of motion sensors

Humanoids Robotics
© 2015 albert-learning.com
HUMAN-ROBOT INTERACTION:
This area includes the study of human factors related to the tasking and control of humanoid robots. How will we communicate efficiently, accurately, and conveniently with humanoids?
Humanoids Robotics
© 2015 albert-learning.com
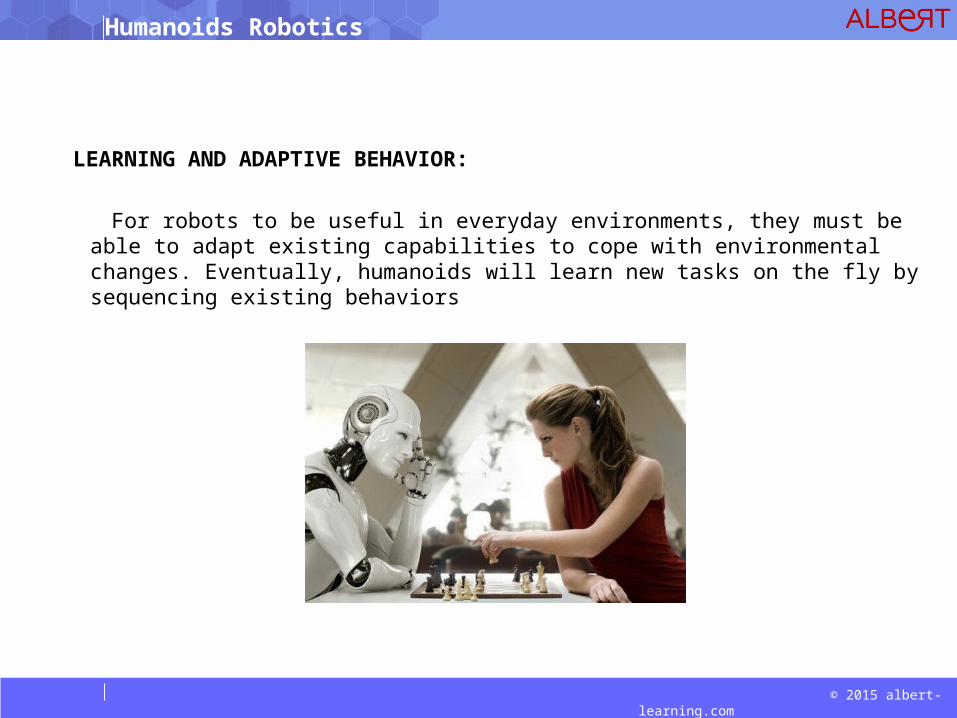
LEARNING AND ADAPTIVE BEHAVIOR:
For robots to be useful in everyday environments, they must be able to adapt existing capabilities to cope with environmental changes. Eventually, humanoids will learn new tasks on the fly by sequencing existing behaviors

Humanoids Robotics
© 2015 albert-learning.com
LEGGED LOCOMOTION:
The problem is that walking is not simply a forwards-backwards mechanical movement of the legs, but a full-body balancing act that must occur faster than real-time.

Humanoids Robotics
© 2015 albert-learning.com
ARM CONTROL AND DEXTEROUS MANIPULATION:
Around the world, researchers are working on dexterous tasks including catching balls, juggling, chopping vegetables, performing telesurgery, and pouring coffee. The humanoid body functions as a whole and consequently, small errors in even one joint can drastically degrade the performance of the whole body.

Humanoids Robotics
© 2015 albert-learning.com
SOME GOOD PROJECTS
ASIMO, an acronym for Advanced Step in Innovative Mobility, is a humanoid robot designed and developed by Honda.
Nao . . . is an autonomous, programmable humanoid robot developed by Aldebaran Robotics, a French robotics company headquartered in Paris.
Enon was created to be a personal assistant. It is self-guiding and has limited speech recognition and synthesis. It can also carry things.
Humanoid robots or even 2 armed robots that can have up to 40 degrees of freedom are unsuited for dynamic environments with today's technology.

Humanoids Robotics
© 2015 albert-learning.com