Human Robot Interaction - Ryerson University · 2006-02-27 · Human Robot Interaction Social...
11
1 Department of Computer Science Human Robot Interaction Social Robots
Transcript of Human Robot Interaction - Ryerson University · 2006-02-27 · Human Robot Interaction Social...

1
Department of Computer Science
Human Robot InteractionSocial Robots

2
LEADERS OF TOMORROWDepartment of Computer Science
About This Class
• Source Material– “Social Interaction in HRI-The Robot View”– “Fostering Common Ground in Human-Robot
Interaction”• Topics
Available on the course web site. A good paper.

3
LEADERS OF TOMORROWDepartment of Computer Science
Social Robot
• Instantiated physical interaction with theworld
• Walk-up-and-interact• Relies on common understanding of
communication and interaction in a society• Does what is socially acceptable and
expected• Knows about social cues

4
LEADERS OF TOMORROWDepartment of Computer Science
Design Issues
• What should it look like?• What social cues are important?• Does it need a “face”?
– A physical face or a face-on-a-display• Does it have to look human/animal?

5
LEADERS OF TOMORROWDepartment of Computer Science
Personality
• Should there be a personality?• Compatible with humans?• Creature-like?• Baby-like?

6
LEADERS OF TOMORROWDepartment of Computer Science
Baby Robots• "My Real Baby" is a robotic
doll created by Irobot andHasbro.
• The doll senses when it isrocked, picked up, tickled,given a bottle, etc.
• The doll exhibits facialexpressions, growth oflanguage and an "awarenessof what's going on aroundher".
7
LEADERS OF TOMORROWDepartment of Computer Science
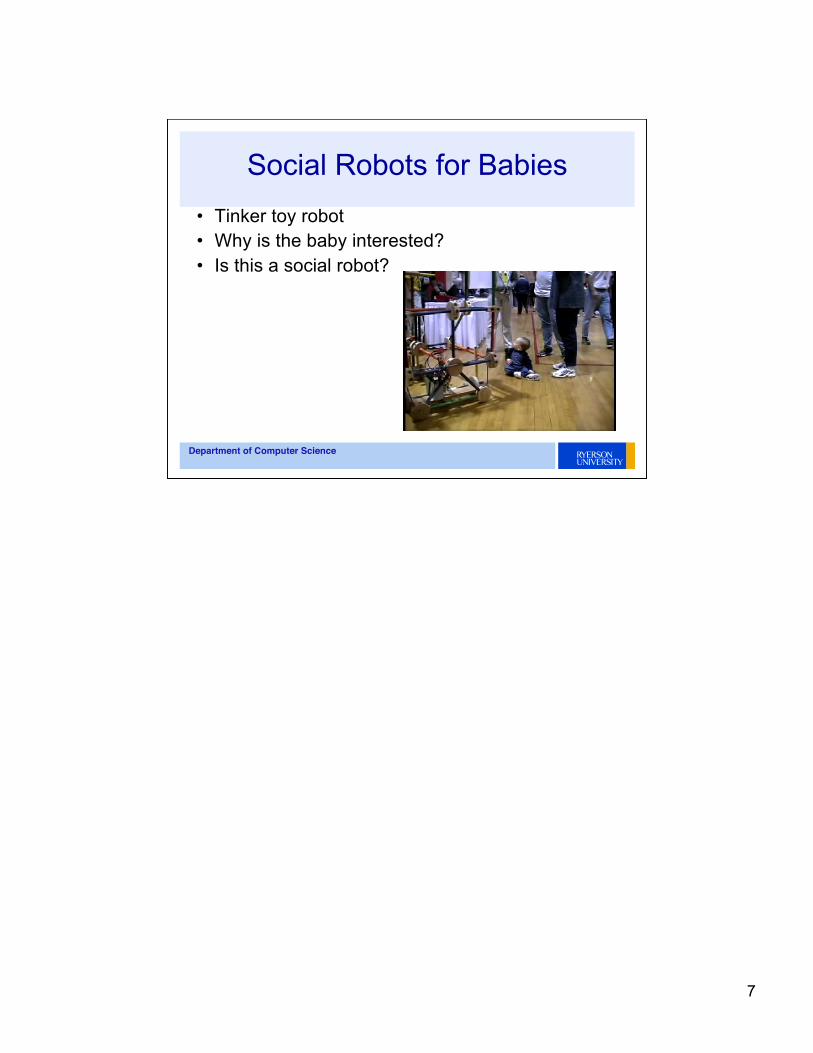
Social Robots for Babies• Tinker toy robot• Why is the baby interested?• Is this a social robot?

8
LEADERS OF TOMORROWDepartment of Computer Science
Animal-Like Social Robots• AIBO• Less complex than human-
to-humanoid• The use of animal-like
autonomous robots mightoffer new possibilities in thestudy of animalinteractions, if the subjectrecognizes it as a socialpartner

9
LEADERS OF TOMORROWDepartment of Computer Science
KISMET• Expressive robotic creature with perceptual and motor modalities
tailored to natural human communication channels.• Work of Dr. Cynthia Breazeal at MIT AI lab• natural infant-caretaker interaction• The motor outputs include vocalizations, facial expressions, and
motor capabilities to adjust the gaze direction of the eyes and theorientation of the head.

10
LEADERS OF TOMORROWDepartment of Computer Science
KISMET - Attention
• Constrain the task– Metaphor of the “learning baby”
• Addresses the problem of “attention”– The “Christmas present box” problem– Uses a series of computational artifices
• Find the bright spot• Pick the colour that matters• Find the movement and track it
When small children receive a give in a box, often the box is moreinteresting to them than the actual gift. This is a problem of attention,we learn attention over time as we interact in our society.
Video clips “attention-narrative” and “attention-screen”

11
LEADERS OF TOMORROWDepartment of Computer Science
KISMET - Regulation• Learning can be made easier if the
situation is made more inviting andtechnically feasible.
• The notion of personal space– Addresses
• Distance and Speed of interaction– Must have the sensors at the right distance to
sense– Exhibit social cues that allow this to happen
in cooperation with stimulant.
If someone is yelling at you to make a decision the decision is oftenvery difficult to make. If you are trying to learn to read while someoneis hitting you with a slipper, the result is often illiteracy.
Video clips “back-off-buster”, “come-hither-friend”, “conversation-narrative” and “kismet-and-rich”