HST 722 – Speech Motor Control1 Auditory, Somatosensory, and Motor Interactions in Speech...
50
HST 722 – Speech Motor Control 1 Auditory, Somatosensory, and Motor Interactions in Speech Production Supported by NIDCD, NSF. Frank H. Guenther Department of Cognitive and Neural Systems, Boston University Division of Health Sciences and Technology, Harvard University / M.I.T. Research Laboratory of Electronics, Massachusetts Institute of Technology Satrajit Ghosh Alfonso Nieto- Castanon Jason Tourville Oren Civier Kevin Reilly Jason Bohland Jonathan Brumberg Michelle Hampson Joseph Perkell Virgilio Villacorta Majid Zandipour Melanie Matthies Shinji Maeda Collaborators
-
Upload
norman-allen -
Category
Documents
-
view
217 -
download
1
Transcript of HST 722 – Speech Motor Control1 Auditory, Somatosensory, and Motor Interactions in Speech...

HST 722 – Speech Motor Control 1
Auditory, Somatosensory, and Motor Interactions in Speech Production
Supported by NIDCD,
NSF.
Frank H. Guenther
Department of Cognitive and Neural Systems, Boston UniversityDivision of Health Sciences and Technology, Harvard University / M.I.T.
Research Laboratory of Electronics, Massachusetts Institute of Technology
Satrajit GhoshAlfonso Nieto-Castanon
Jason TourvilleOren CivierKevin Reilly
Jason BohlandJonathan BrumbergMichelle Hampson
Joseph PerkellVirgilio VillacortaMajid ZandipourMelanie Matthies
Shinji Maeda
Collaborators

HST 722 – Speech Motor Control 2
CNS Speech Lab at Boston University
Primary goal is to elucidate the neural processes underlying:
• Learning of speech in children• Normal speech in adults• Breakdowns of speech in disorders such as stuttering
and apraxia of speech
Methods of investigation include:• Neural network modeling• Functional brain imaging• Motor and auditory psychophysics
These studies are organized around the DIVA model, a neural network model of speech acquisition and production developed in our lab.

HST 722 – Speech Motor Control 3
Talk Outline
Overview of the DIVA model• Mirror neurons in the model• Learning in the model• Simulating a hemodynamic response from the
model
Feedback control subsystem• Auditory perturbation fMRI experiment• Somatosensory perturbation fMRI experiment
Feedforward control subsystem• Sensorimotor adaptation to F1 perturbation
Summary

HST 722 – Speech Motor Control 4
Schematic of the DIVA Model

HST 722 – Speech Motor Control 5
Boxes in the schematic correspond to maps of neurons; arrows correspond to synaptic projections.
The model controls movements of a “virtual vocal tract”, or articulatory synthesizer. Video shows random movements of the articulators in this synthesizer.
Production of a speech sound in the model starts with activation of a speech sound map cell in left ventral premotor cortex (BA 44/6), which in turn activates feedforward and feedback control subsystems that converge on primary motor cortex.

HST 722 – Speech Motor Control 6
Speech Sound Map Mirror Neurons
Since its inception in 1992, the DIVA model has included a speech sound map that contains cells which are active during both perception and production of a particular speech sound (phoneme or syllable).
During perception, these neurons are necessary to learn an auditory target or goal for the sound, and to a lesser degree somatosensory targets (limited to the visible articulators such as lips).
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
Speech sound map during perception

HST 722 – Speech Motor Control 7
Speech Sound Map Mirror Neurons
After a sound has been learned (described next), activating the speech sound map cells for the sound leads to readout of the learned feedforward commands (“gestures”) and auditory and somatosensory targets for the sound (red arrows at right).
These targets are compared to incoming sensory signals to generate corrective commands if needed (blue).
The overall motor command (purple) combines feedforward and feedback components.
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
Speech sound map during production

HST 722 – Speech Motor Control 8
Learning in the Model – Stage 1
In the first learning stage, the model learns the relationships between motor commands, somatosensory feedback, and auditory feedback.
In particular, the model needs to learn how to transform sensory error signals into corrective motor commands.
This is done with babbling movements of the vocal tract which provide paired sensory and motor signals that can be used to tune these transformations.
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command

HST 722 – Speech Motor Control 9
Learning in the Model – Stage 2 (Imitation)
The model then needs to learn auditory and somatosensory targets for individual speech sounds, and feedforward motor commands (“gestures”) for these sounds. This is done through an imitation process involving the speech sound map cells.
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
Model projections tuned during the imitation process are shown in red.

HST 722 – Speech Motor Control 10
The Imitation Process
(1) The model learns an auditory target from a sound sample provided by a fluent speaker; this target is stored in the synaptic weights projecting from the speech sound map to the higher-order auditory cortical areas.
(2) The model practices production of the sound to tune the feedforward commands and learn a somatosensory target.
Auditory target
for “ba”

HST 722 – Speech Motor Control 11
Simulation – Learning Feedforward Commands
Then it tries to repeat the target, initially under auditory feedback control. With each repetition, the model relies less on feedback control and more on feedforward control, resulting in better and better productions.
The model first learns the auditory target for the sound by listening to someone produce it. Sound sample presented to model:

HST 722 – Speech Motor Control 12
Top panel: Spectrogram of target utterance presented to the model.
Remaining panels:Spectrograms of the model’s first few attempts to produce the utterance.
Note improvement of auditory trajectories with each practice iteration due to improved feedforward commands.

HST 722 – Speech Motor Control 13
Tongue
Lip
Jaw
Larynx
SSM
S
A
Aud
Resp†
Lat Cbm
Palate*
Tongue
Lip
Jaw
Larynx
S
A
AudLat Cbm
Palate*
Resp†
Estimated Anatomical Locations of Model Components
The anatomical locations of the model’s components have been fine-tuned by comparison to the results of previous neurophysiological and neuroimaging studies (Guenther, Ghosh, and Tourville, 2006).
Each model component corresponds to a particular region of the brain:
Simulating a Hemodynamic Response in the Model

HST 722 – Speech Motor Control 14
The model’s cell activities during simulations can be directly compared to the results of fMRI and PET studies.

HST 722 – Speech Motor Control 15
Talk Outline
Overview of the DIVA model• Mirror neurons in the model• Learning in the model• Simulating a hemodynamic response from the
model
Feedback control subsystem• Auditory perturbation fMRI experiment• Somatosensory perturbation fMRI experiment
Feedforward control subsystem• Sensorimotor adaptation to F1 perturbation
Summary

HST 722 – Speech Motor Control 16
The model’s feedback control subsystem compares learned auditory and somatosensory target regions for the current speech sound to incoming sensory information.
If the current auditory or somatosensory state is outside the target region for the sound, error signals arise in higher-order auditory and/or somatosensory areas in the superior temporal lobe and parietal lobe.
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
Feedback Control Subsystem

HST 722 – Speech Motor Control 17
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
Feedback Control Subsystem (continued)
Auditory and somatosensory error signals are then transformed into corrective motor commands via projections from the sensory areas to the motor cortex.

HST 722 – Speech Motor Control 18
Prediction: Auditory Error Cells
The model hypothesizes an auditory error map in the higher-order auditory cortex of the posterior superior temporal gyrus and planum temporale.
Cells in this map should become active if a subject’s auditory feedback of his/her own speech is perturbed so that it mismatches the subject’s auditory target.
The model also predicts that this auditory error cell activation will give rise to increased activity in motor areas, where corrective articulator commands are generated.

HST 722 – Speech Motor Control 19
fMRI Study of Unexpected Auditory Perturbation During Speech
To test these predictions, we performed an fMRI study involving 11 subjects in which the first formant frequency (an important acoustic cue for speech) was unexpectedly perturbed upward or downward by 30% in ¼ of the production trials.
The perturbed feedback trials were randomly interspersed with normal feedback trials so the subject could not anticipate the perturbations.
Perturbations were applied using a DSP device developed with colleagues at MIT (Villacorta, Perkell, Guenther, 2004) which feeds the modified speech signal back to the subject in near real-time (~16 ms delay, not noticeable to subject).
Sound before shift:
Sound after shift:

HST 722 – Speech Motor Control 20
Time (sec)
Nor
ma
lize
d F
1
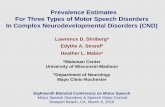
Unexpectedly shifting the feedback caused subjects to compensate within the same syllable as the shift (gray 95% confidence intervals):
DIVA model productions in response to unexpected upward (dashed line) and downward (solid line) perturbations of F1 fall within the distribution of productions of the speakers in the fMRI study (shaded regions).
Response to downshift
Response to upshift

HST 722 – Speech Motor Control 21
=> Auditory feedback control is right-lateralized in the frontal cortex.

HST 722 – Speech Motor Control 22
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
The model also predicts that a sudden, unexpected perturbation of the jaw should cause an increase in error cell activity in somatosensory and (perhaps) auditory cortical areas.
This in turn should lead to increased activity in motor areas where corrective commands are generated.
Prediction: Somatosensory Error Cells

HST 722 – Speech Motor Control 23
fMRI Study of Unexpected Jaw Perturbation During Speech
13 subjects produced /aCi/ utterances while in the MRI scanner (e.g., “abi”, “ani”, “agi”).
An event-triggered paradigm was used to avoid movement artifacts and scanner noise issues:
On 1 in 7 utterances, a small balloon was rapidly inflated between the teeth during the initial vowel.
The balloon inhibits upward jaw movement for the consonant and final vowel, causing the subject to compensate with larger tongue and/or lip movements.

HST 722 – Speech Motor Control 24
Perturbed – Unperturbed Speech (p<0.001):
L
L
R
R
L
R

HST 722 – Speech Motor Control 25
Talk Outline
Overview of the DIVA model• Mirror neurons in the model• Learning in the model• Simulating a hemodynamic response from the
model
Feedback control subsystem• Auditory perturbation fMRI experiment• Somatosensory perturbation fMRI experiment
Feedforward control subsystem• Sensorimotor adaptation to F1 perturbation
Summary

HST 722 – Speech Motor Control 26
Feedforward Control in the Model
In addition to activating the feedback control subsystem, activating speech sound map cells also causes the readout of feedforward commands for the sound to be produced.
These commands are encoded in synaptic projections from premotor cortex to primary motor cortex, including both cortico-cortical (blue) and trans-cerebellar (purple) projections.
Feedforward commands in the DIVA model

HST 722 – Speech Motor Control 27
The commands generated by the feedforward system (red) and feedback system (blue) are combined in motor cortex to form the overall motor command to the speech articulators (purple)
Combining Feedforward and Feedback Commands
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command

HST 722 – Speech Motor Control 28
Early in development, the feedforward commands are poorly tuned, so the feedback control subsystem is needed to “correct” the commands.
On each attempt to produce a sound, the feedforward controller incorporates these feedback-based corrections into the feedforward command for the next attempt, resulting in better and better feedforward control with practice.
Tuning Feedforward Commands

HST 722 – Speech Motor Control 29
The interactions between the feedforward and feedback control subsystems in the model lead to the following predictions:
• If a speaker’s auditory feedback is perturbed consistently over many consecutive productions of a syllable, corrective commands issued by the auditory feedback control subsystem will become incorporated into the feedforward commands for that syllable.
• Speakers with better hearing (auditory acuity) will adapt more than speakers with worse hearing.
• If the perturbation is then removed, the speaker will show “after-effects” due to these adjustments to the feedforward command.
This was investigated by Villacorta, Perkell, & Guenther (2004).

HST 722 – Speech Motor Control 30
Sensorimotor Adaptation Study – F1 Perturbation
In each epoch of the adaptation study, the subject read a short list of words involving the vowel “eh” (e.g., “bet”, “peck”).
After a baseline phase of 15 epochs of reading with normal feedback, a shift of F1 was gradually applied to the subject’s auditory feedback during the next 5 epochs.
The shift was then held at the maximum level (30% shift) for 25 epochs.
Finally, feedback was returned to normal in a 20-epoch post-test phase.
The entire experimental session lasted approximately 60-90 minutes.

HST 722 – Speech Motor Control 31
• Results for 20 subjects shown by lines with standard error bars.• Shaded region is the 95% confidence interval for model
simulation results (one simulation per speaker, target region size determined by speaker’s auditory acuity).

HST 722 – Speech Motor Control 32
Sensorimotor Adaptation Study Results
• Sustained auditory perturbation leads to adjustments in feedforward commands for speech in order to cancel out the effects of the perturbation.
• Amount of adaptation is correlated to speaker’s auditory acuity: high acuity speakers adapt more completely to the perturbation.
• When perturbation is removed, speech only gradually returns to normal values; i.e., there is an after-effect in the first few trials after hearing returns to normal (evidence for feedforward command adaptation).
• The model provides a close quantitative fit to these processes.

HST 722 – Speech Motor Control 33
Summary
The DIVA model elucidates several types of learning in speech acquisition, e.g.:
• Learning of relationships between articulations and their acoustic and somatosensory consequences
• Learning of auditory targets for speech sounds in the native language from externally presented examples
• Learning of feedforward commands for new sounds through practice
The model elucidates the interactions between motor, somatosensory, and auditory areas responsible for speech motor control.
The model spans behavioral and neural levels and makes predictions that are being tested using a variety of experimental techniques.

HST 722 – Speech Motor Control 34
Reconciling Gestural and Auditory Views of Speech Production
In our view, the “gestural score” is the feedforward component of speech production, stored in the projections from premotor to motor cortex, which consists of an optimized set of motor programs for the most frequently produced phonemes, syllables and syllable strings (in Levelt’s terms, the “syllabary”).
These gestural scores are shaped by auditory experience in order to adhere to acceptable auditory bounds of speech sounds in the native language(s).
They are supplemented by auditory and somatosensory feedback control systems that constantly adjust the gestures when they detect errors in performance, e.g. due to growth of the vocal tract, addition of a false palate, or auditory feedback perturbation.

HST 722 – Speech Motor Control 35
Alfonso Nieto-Castanon
Satrajit GhoshJason TourvilleKevin Reilly Oren Civier
Jonathan BrumbergJason Bohland
Michelle Hampson
Joseph PerkellMajid ZandipourVirgilio VillacortaMelanie Matthies
Shinji Maeda
Collaborators
Supported by NSF and NIDCD

HST 722 – Speech Motor Control 36
Simulating a Hemodynamic Response from the Model
Model cell activities during simulations of speech are convolved with an idealized hemodynamic response function, generated using default settings of the function ‘spm_hrf’ from the SPM toolbox. This function was designed to characterize the transformation from cell activity to hemodynamic response in the brain.
A brain volume is then constructed with the appropriate hemodynamic response values at each position and smoothed with a Gaussian kernel (FWHM=12mm). This smoothing process approximates the smoothing carried out during standard SPM analysis of human subject fMRI data.
The resultant volume is then rendered using routines from the SPM toolbox.

HST 722 – Speech Motor Control 37
An event-triggered paradigm was used to avoid movement artifacts and scanner noise issues:

HST 722 – Speech Motor Control 38
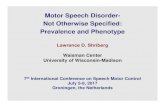
Error signal magnitude of stuttering individual
Threshold for motor reset due to sensory error signals
Error signal magnitude for non-stuttering individual
Onset ofstuttering
Age
Hypothesis regarding onset of stuttering:

HST 722 – Speech Motor Control 39
Brain regions active during cued production of 3-syllable strings
IFS BA 44
Pre SM A SM A
Se q ue nc eWM
Sp e e c hSo und M a p
Trig g e r C e llsFra m e Re p
Ne xtSo und
Trig g e rSig na ls
Fra m eSig na ls
To m o to rc o rte x(DIVA
m o d e l)
O ve rtsp e e c ho nly

HST 722 – Speech Motor Control 40
Target for /k/
Config. for /u/ Config. for /i/
Tongue Body Horiz. Position
Ton
gue
Bod
y H
eigh
t
The model’s use of sensory target regions provides a unified account for a number of speech production phenomena, including aspects of:
• Economy of effort (cf. Lindblom)
•Articulatory variability
•Anticipatory coarticulation
•Carryover coarticulation
•Speaking rate effects
Schematized at right is the model’s explanation of carryover coarticulation and economy of effort during production of /k/ in “luke” and “leak”.
Carryover Coarticulation
Auditory Target Regions

HST 722 – Speech Motor Control 41
Contrast distance
/i/
/e/
First formant frequency
Second formant frequency
Two factors that could influence target region size:
(1) Perceptual acuity of speaker: better perceptual acuity => smaller regions
(2) Speaking condition: clear speech (vs. fast speech) => smaller regions

HST 722 – Speech Motor Control 42
0
2
4
6
8
10
L
LL
Art
icu
lato
ryC
on
trast
Dis
tan
ce (
mm
)
H
HH
F N CSpeaking Condition
200
250
300
350
400
L
L
L
Ac
ou
sti
cCo
ntr
ast
Dis
tan
ce (
Hz)
H
HH
L LL
H HH
F N CSpeaking Condition
LL
L
HH
H
Who'd-Hood Cod -Cud
* *
*
LO
HI LO
HI
LO
HI
LO
HI
L
LLH
HH
L
L
LH
HH
L LL
H HH
LL
L
HH
H
- -Cud
* *
*
LO
HI LO
HI
LO
HI
0
2
4
6
8
10
L
LL
Art
icu
lato
ryC
on
trast
Dis
tan
ce (
mm
)
H
HH
F N CSpeaking Condition
200
250
300
350
400
L
L
L
Ac
ou
sti
cCo
ntr
ast
Dis
tan
ce (
Hz)
H
HH
L LL
H HH
F N CSpeaking Condition
LL
L
HH
H
Who'd-Hood Cod -Cud
* *
*
LO
HI
LO
HI LO
HI
LO
HI
LO
HI
LO
HI
LO
HI
LO
HI
L
LLH
HH
L
L
LH
HH
L LL
H HH
LL
L
HH
H
- -Cud
* *
*
LO
HI LO
HI
LO
HI
F N C0
500
1000
1500
2000
Aco
ust
ic c
on
tra
st d
ista
nce
(H
z)
F N C
HH H
LL L
Sod-shod Said-shed
Speaking condition
Discrimination
F N CF N C
HH
H
L L L
Speaking condition
*H
L
H
L
F N CF N C
HH H
LL L
- -
HH
H
L L LH
L
H
LHH H
LL L
- -
HH
H
L L LH
L
H
L
F N C0
500
1000
1500
2000
Aco
ust
ic c
on
tra
st d
ista
nce
(H
z)
F N C
HH H
LL L
Sod-shod Said-shed
Speaking condition
Discrimination
F N CF N C
HH
H
L L L
Speaking condition
*H
L
H
L
F N C0
500
1000
1500
2000
Aco
ust
ic c
on
tra
st d
ista
nce
(H
z)
F N C
HH H
LL L
Sod-shod Said-shed
Speaking condition
Discrimination
F N CF N C
HH
H
L L L
Speaking condition
*H
L
H
L
F N CF N C
HH H
LL L
- -
HH
H
L L LH
L
H
LHH H
LL L
- -
HH
H
L L LH
L
H
L
Who’d- Hood Cod-Cud
Perkell et al. (2004a,b).
Results of EMMA studies:
(1) Speakers with high perceptual acuity show greater contrast distance in production of neighboring sound categories.
(2) General tendency for greater contrast distance in clear speech, less in fast speech.
These results support the predictions on the preceding slide.

HST 722 – Speech Motor Control 43
Ellipses indicating the range of formant frequencies (+/-1 s.d.) used by a speaker to produce five vowels (iy, eh, aa, uh, uw) during fast speech (light gray) and clear speech (dark gray) in a variety of phonetic contexts.

HST 722 – Speech Motor Control 44
Motor Equivalence in American English /r/ Production
It has long been known that the American English phoneme /r/ is produced with a large amount of articulatory variability, both within a subject and between subjects. Delattre and Freeman (1968):

HST 722 – Speech Motor Control 45
Despite large articulatory variability, the key acoustic cue for /r/ remains relatively stable across phonetic contexts. Boyce and Espy-Wilson (1997):

HST 722 – Speech Motor Control 46
Motor Equivalence in the DIVA Model
Model’s use of auditory target for /r/ and directional mapping between auditory and articulatory spaces leads to different articulatory gestures, and different vocal tract shapes, for /r/ depending on phonetic context:
Producing /r/ after /g/: Producing /r/ after /a/:
EMMA/Modeling Study:
(1) Collect EMMA data from speakers producing /r/ in different contexts (2) Build speaker-specific vocal tract models (articulatory synthesizers) for two
of the speakers(3) Train the DIVA model to produce sounds with the speaker-specific vocal
tracts(4) Compare the model’s /r/ productions to those of the EMMA subjects

HST 722 – Speech Motor Control 47
Sketch of hypothesized trading relations for /r/:
Acoustic effect of the larger front cavity (blue) is compensated by the effect of the longer and narrower constriction (red).
This yields similar acoustics for “bunched” (red) and “retroflex” (blue) tongue configurations for /r/ (Stevens, 1998; Boyce & Espy-Wilson, 1997).
All seven subjects in the EMMA study utilized similar trading relations (Guenther et al., 1999).
Lips
Tongueconstriction
/wagrav//warav/ or /wabrav/
S1
S2
S3
S4
S5
S6
S7
BACK FRONT BACK FRONT
1 cm

HST 722 – Speech Motor Control 48
changing F1 changing F2 changing F3
Su
bje
ct 1
Su
bje
ct 2
Building Speaker-Specific Vocal Tract Models from MRI Images

HST 722 – Speech Motor Control 49
/ar/ /dr/ /gr/ /ar/ /dr/ /gr/
sub
ject
d
ata
DIV
A
sim
ula
tio
ns
Subject 1 Subject 2
[Nieto-Castanon, Guenther, Perkell, and Curtin (2005), J Acoust Soc Am.]
Comparison of model’s articulations using speaker-specific vocal tracts to those speakers’ actual articulations:

HST 722 – Speech Motor Control 50
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command
Speech Sound Map
(Premotor Cortex)
Articulator Velocity and
Position Cells (Motor Cortex)
Auditory Error(Auditory Cortex)
Somatosensory Error
(Somatosensory Cortex)
Auditory GoalRegion
Somatosensory Goal Region
Somatosensory State
Auditory State
FeedforwardCommand
To Muscles
Auditory Feedback-Based Command
Somatosensory Feedback-Based Command