
How humans shape wolf behavior in Banff and Kootenay ...files.cfc.umt.edu/heblab/EM_Musiani et al....
14
Ecological Modelling 221 (2010) 2374-2387 ELSEVIER Contents lists available at ScienceDirect Ecological Modelling journal homepage: www.elsevier.com/locate/ecolmodel ECOLOGICAL MODELLING How humans shape wolf behavior in Banff and Kootenay National Parks, Canada Marco Musiani®, Sk. Morshed Anw arG regory J. McDermid‘^, Mark Hebblewhite'^, Danielle J. Marceau'^ * “ Faculty of Environmental Design, University of Calgary, Calgary, AB, T2N 1N4 Canada I" Department of Geomatics Engineering, University o f Calgary, 2500 University Drive NW, Calgary, AB, T2N 1N4 Canada Department o f Geography, University o f Calgary, Calgary, AB, T2N 1N4 Canada '* Department of Ecosystem and Conservation Sciences, University o f Montana, Missoula, ZIP code 59812, USA ARTICLE INFO ABSTRACT Article history: Received 2 June 2009 Received In revised form 17 April 2010 Accepted ISJune 2010 Available online 23 July 2010 Keywords: Agent-based model Human-wlldllfe Interaction Wolf Banff National Park Kootenay National Park Human Impact Recreation This paper describes the conceptualization and implementation of an agent-based model to investi gate how varying levels of human presence could affect elements of wolf behavior, including highway crossings; use of areas in proxim ity to roads and trails; size of home ranges; activities, such as hunting, patrolling, resting, and feeding pups; and survival of individuals in Banff and Kootenay National Parks, Canada. The model consists of a wolf module as the primary component with five packs represented as cognitive agents, and grizzly bear, elk, and human modules that represent dynamic components of the environment. A set of environmental data layers was used to develop a friction model that serves as a base map representing the landscape over which wolves moved. A decision model was built to simulate the sequence of w olf activities. The model was implemented in a Java Programming Language using RePast, an agent-based modeling library. Six months of wolf activities were simulated from April 16 to October 15 (i.e., a season coherent with regard to known wolf behaviors), and calibrated with GPS data from wolf radiocollars (n= 15) deployed from 2002 to 2004. Results showed that the simulated trajectories of wolf movements were correlated w ith the observed trajectories (Spearman’s rho 0.566, P< 0.001); other critical behaviors, such as time spent at the den and not traveling were also correlated. The simulations revealed that wolf movements and behaviors were noticeably affected by the intensity of human pres ence. The packs’ home ranges shrank and wolves crossed highways less frequently w ith increased human presence. In an extreme example, a wolf pack whose home range is traversed by a high-traffic-volume highway was extirpated due to inability to hunt successfully under a scenario wherein human presence levels were increased 10-fold. The modeling prototype developed in this study may serve as a tool to test hypotheses about human effects on wolves and on other mammals, and guide decision-makers in designing management strategies that minimize impacts on wolves and on other species functionally related to wolves in the ecosystem. © 2010 Elsevier B.V. All rights reserved. 1. Introduction Managers of protected areas must meet the challenging man date of balancing demand for public opportunities to use and enjoy the landscape with the obligation to protect ecological Integrity. As a result, there Is an on-golng need to develop research tools to explore human-envlronment relationships and predict the Impact of human activities on wildlife species. This Is the case for Banff and Kootenay National Parks, which provide habitat to a number of charismatic wildlife species Including wolves (Canis lupus), grizzly (t/rsus arctos) and black (Ursus americanus) bears, elk {Cervus elaphus), white-tailed deer (Odocoiteus virginianus), mule Corresponding author. Tel.: +1 403 220 5314; fax: +1 403 284 1980. E-mail address: [email protected] (D.J. Marceau). deer (Odocoileus hemionus), moose (Aloes aloes), bighorn sheep (Ovis oanadensis), and mountain goats (Oreamnos amerioanus). However, Banff and Kootenay National Parks also receive more than four million human visitors every year who partake In a variety of recre ational activities Including skiing, camping, and hiking. Considering these figures and the Increasing conflicts between wildlife and humans In this rich landscape. Parks Canada (2007) recently stated the need to understand the degree of human Impact on wildlife movement and habitat In this region. Large carnivores are known to be susceptible to human Impacts due to their low density, high tropic level, and low reproductive rate (Nielson et al., 2004), and to the loss and fragmentation of their habitats, human-induced mortality, and loss of prey base (Carroll et al., 2001; Larsen and Ripple, 2006). Wolves, In particular, can be greatly affected by the cumulative effects of human activities (Frltts et ah, 2003), as has been demonstrated by the history of humans and 0304-3800/S - see front matter © 2010 Elsevier B.V. All rights reserved. dol:10.1016/j.ecolmodel.2010.06.019
Transcript of How humans shape wolf behavior in Banff and Kootenay ...files.cfc.umt.edu/heblab/EM_Musiani et al....

Ecological M odelling 221 (2010) 2374-2387
ELSEVIER
C o n te n ts lis ts a v a ila b le a t S c ie n ce D ire c t
Ecological Modelling
j o u r n a l h o m e p a g e : w w w . e l s e v i e r . c o m / l o c a t e / e c o l m o d e l
ECOLOGICALM ODELLING
How humans shape w olf behavior in Banff and Kootenay National Parks, CanadaMarco Musiani®, Sk. Morshed A n w a rG re g o ry J. McDermid‘̂ , Mark Hebblewhite'^,Danielle J. Marceau'^ *“ Faculty o f Environmental Design, University o f Calgary, Calgary, AB, T2N 1N4 CanadaI" Department o f Geomatics Engineering, University o f Calgary, 2500 University Drive NW, Calgary, AB, T2N 1N4 Canada
Department o f Geography, University o f Calgary, Calgary, AB, T2N 1N4 Canada '* Department o f Ecosystem and Conservation Sciences, University o f Montana, Missoula, ZIP code 59812, USA
A R T I C L E I N F O A B S T R A C T
Article history:Received 2 June 2009Received In revised form 17 A p ril 2010Accepted ISJune 2010Available online 23 July 2010
Keywords:Agent-based model H um a n -w lld llfe Interaction W o lfBanff National Park Kootenay National Park Human Impact Recreation
This paper describes the conceptualization and im plementation of an agent-based model to investigate how varying levels of human presence could affect elements o f w o lf behavior, including highway crossings; use o f areas in p rox im ity to roads and trails; size o f home ranges; activities, such as hunting, patrolling, resting, and feeding pups; and survival o f individuals in Banff and Kootenay National Parks, Canada. The model consists o f a w o lf module as the prim ary component w ith five packs represented as cognitive agents, and grizzly bear, elk, and human modules that represent dynamic components of the environment. A set o f environmental data layers was used to develop a fric tion model that serves as a base map representing the landscape over which wolves moved. A decision model was bu ilt to simulate the sequence o f w o lf activities. The model was implemented in a Java Programming Language using RePast, an agent-based modeling library. Six months o f w o lf activities were simulated from April 16 to October 15 (i.e., a season coherent w ith regard to known w o lf behaviors), and calibrated w ith GPS data from w o lf radiocollars (n= 15) deployed from 2002 to 2004. Results showed that the simulated trajectories of w o lf movements were correlated w ith the observed trajectories (Spearman’s rho 0.566, P< 0.001); other critical behaviors, such as time spent at the den and not traveling were also correlated. The simulations revealed that w o lf movements and behaviors were noticeably affected by the intensity o f human presence. The packs’ home ranges shrank and wolves crossed highways less frequently w ith increased human presence. In an extreme example, a w o lf pack whose home range is traversed by a high-traffic-volum e highway was extirpated due to inab ility to hunt successfully under a scenario wherein human presence levels were increased 10-fold. The modeling prototype developed in this study may serve as a tool to test hypotheses about human effects on wolves and on other mammals, and guide decision-makers in designing management strategies that m inim ize impacts on wolves and on other species functionally related to wolves in the ecosystem.
© 2010 Elsevier B.V. A ll rights reserved.
1. Introduction
Managers o f protected areas m ust meet the challenging m andate o f balancing demand for public opportunities to use and enjoy the landscape w ith the ob ligation to protect ecological In tegrity. As a result, there Is an on-golng need to develop research tools to explore hum an-envlronm ent relationships and predict the Impact o f human activities on w ild life species. This Is the case fo r Banff and Kootenay National Parks, w h ich provide habitat to a num ber o f charismatic w ild life species Including wolves (Canis lupus), grizz ly (t/rsus arctos) and black (Ursus americanus) bears, elk {Cervus elaphus), w h ite -ta iled deer (Odocoiteus virginianus), mule
Corresponding author. Tel.: +1 403 220 5314; fax: +1 403 284 1980. E-mail address: [email protected] (D.J. Marceau).
deer (Odocoileus hemionus), moose (Aloes aloes), b ighorn sheep (Ovis oanadensis), and m ountain goats (Oreamnos amerioanus). However, Banff and Kootenay National Parks also receive more than four m illio n human visitors every year w ho partake In a varie ty o f recreational activities Including skiing, camping, and hiking. Considering these figures and the Increasing conflicts between w ild life and humans In th is rich landscape. Parks Canada (2007) recently stated the need to understand the degree o f human Impact on w ild life m ovem ent and habitat In th is region.
Large carnivores are known to be susceptible to human Impacts due to the ir low density, high trop ic level, and low reproductive rate (Nielson et al., 2004), and to the loss and fragm entation o f the ir habitats, hum an-induced m orta lity , and loss o f prey base (Carroll et al., 2001; Larsen and Ripple, 2006). Wolves, In particular, can be greatly affected by the cum ulative effects o f human activ ities (Frltts et ah, 2003), as has been demonstrated by the h istory o f humans and
0304-3800/S - see fron t m atte r © 2010 Elsevier B.V. A ll rights reserved. dol:10.1016/j.ecolmodel.2010.06.019

M. Musiani et al. / Ecological M odelling221 (2010) 2374-2387 2375
wolves in N orth America, in large areas o f the Canadian Rockies, as in many other parts o f N orth America, w o lf populations were system atica lly reduced by predator contro l efforts from approxim ately 1850 to 1930 (M usiani and Paquet, 2004). W olves were eventua lly extirpated from Banff and Kootenay National Parks in the late 1940s; however, they la ter recoionized the m ountain Parks where upon the population grew and extended south to Montana, Idaho, and W ashington in the USA (Paquet et ai., 1996).
Nowadays, wolves are s till impacted by human activities. Previous studies have demonstrated tha t wolves avoid man- made landscape features (e.g., roads) where human use is high, and in general w o lf movements are influenced by human use (W h itting ton et ai., 2004; Mech, 1995). However, wolves also use features like tra ils and roads where human activ ity is low er (Paquet et ai., 1996; Callaghan, 2002). W olves show a strong a ffin ity to iow - eievation valley bottom s in the Banff and Kootenay National Parks region due to the effects o f physiography, weather, prey abundance, and prey d is tribu tion (Paquet et ai., 1996). These valleys are also used by humans for convenient transportation, higher probab ility o f observing w ild life , and scenic beauty and thus the potentia l for human influence on w o lf behavior and survival is high.
A num ber o f approaches have been used to study the im portan t issue o f human impacts on wolves using m u ltip le regression models (M iadenoff et ai., 1997; Purves and Doering, 1999; Larsen and Ripple, 2006; Boyd-Heger, 1997), d iscrim inant function analysis (Corsi et ai., 1999), hidden M arkov models (Franke et ai., 2006), spatial behavioral models (Haight et ai., 1998), stochastic d iffe rentia l equations (Boyce, 1995) and a fric tion or m odified “ least-cost path” model (Paquet et ai., 1996). These established techniques to model h u m a n -w o if in teractions use a snapshot approach to analysis tha t is lim ited by coarse tem poral (seasonal variation) and spatial (landscape level) resolutions, or are designed at the popu la tion level. Thus, they cannot predict the behavior o f social units such as w o lf packs. This is critical, since w o lf packs have inhe rent behavioral va riab ility (Mech, 1970) and may react d iffe ren tly to hum an-induced changes depending both on the tim in g o f the in teraction (Boitani, 1982) and its location (M iadenoff et ai., 1995). For example, there is considerable va riab ility in distances covered by w o lf packs due to the differences in activities perform ed on a particular tim e frame (e.g., a day) such as hunting, pa tro lling o f te rrito ry, and m oving towards the den (Mech, 1970; Van Baiienberghe et ai., 1975; Frltts et ai., 1981; Jgdrzejewski et ai., 2001). Such variation o f pack behavior is not taken in to account in aggregated models or form er models o f human impacts.
From a m ethodological po in t o f view, in addition to the need to model individuals belonging to populations, there is a parallel need to understand and model species w ith in ecological com m unities comprised o f other in teracting species. Strong d irect impacts o f human presence on single species have been studied, and such impacts are frequently m onitored for conservation purposes, although human impacts are often habita t-m ediated (Ehrlich and Ehrlich, 1981). However, any species’ response, and/or resilience to responses, also depends upon interactions w ith other species in the ecosystem (M acArthur, 1955).
in th is study, a spatially and tem pora lly explic it, ind iv idua l- based m odeling approach (G rim m and Railsback, 2005), hereafter called an agent-based model (ABM) (Bousquet and Le Page, 2004; Marceau, 2008) was used to investigate w o lf-hu m a n interactions in Banff and Kootenay National Parks, in western Canada. ABMs are pa rticu larly suitable for fo rm ula ting the processes o f a system by taking in to account the tem poral and spatial dynamics at the ind iv idua l level. They have been applied to study predation and com petition dynamics (Bousquet et ai., 1994), disease spread (Barrett et ai., 2005), and population dynamics (Parry et ai., 2004) and to investigate the effects o f changing landscape structure, human activ ities or management practices on animal species
(Ahearn et al., 2001; Dum ont and H ill, 2001; Cramer and Portier, 2001; Topping et ai., 2003; An et al., 2005; Bennett andTang, 2006; Anw ar et ai., 2007; Bennett et ai., 2009).
This paper describes in detail an ABM tha t has been designed and im plem ented as a research and exploration too l to dynam ically simulate the behavior o f w o lf packs in the Canadian Rockies. Our ABM considers human impacts on w o lf packs and the in teraction o f wolves w ith grizz ly bears (used as an example o f a potent ia lly com peting predator), w ith elk (i.e., the most im portan t prey species), and w ith other habitat factors o f know n im portance to the species. The model was used specifically to investigate the im pact o f increasing levels o f human presence on w o lf m ovem ent patterns in Banff and Kootenay National Parks, it should be seen as a p ro totype tha t focuses on answering questions regarding how humans affect w o lf habitat selection around roads and trails, create disturbances to crucial w o lf activ ities tha t could lead to shrinkage o f home ranges, and im pact ind iv idua l w o lf m o rta lity and survival. This model may serve as a useful too l to test hypotheses about h u m a n -w o if interactions, investigate future scenarios, and guide decision-makers in designing conservation management strategies.
2. Methodology
in th is section, a description o f the study area and the datasets used to calibrate the agent-based model is provided, i t is fo llowed by a presentation o f the conceptual model and its im plem entation.
2.1. Study area
The 6641 km^ study area includes portions o f Banff National Park in A lberta and Kootenay National Park in British Columbia, about 130 km west o f the City o f Calgary (Eig. 1). Topography is rugged, ranging from 1000 to 3500 m in elevation. The climate is strongly seasonal, and characterized by long, cold w inters, and short, w arm summers w ith most precip ita tion occurring in spring. Low-elevation valley-bottom s contain the highest-qua lity habitat for wolves and elk, and are characterized by lodgepole pine (Pinus contorta) and Douglas-fir (Pseudotsuga menziesii) forests in te rspersed w ith riparian w h ite spruce (Picea g lau ca )-w illo w {Satix spp.), aspen (Populus tremuloides) parkland, and grassland systems. Elk are the prim ary prey o f wolves, although alternate prey species include w h ite -ta iled deer, mule deer, moose, bighorn sheep, and m ountain goats. Other large mammals include grizz ly and black bears, w h ich are om nivorous and feed on vegetation and on the same prey item s used by wolves.
The Banff and Lake Louise to w n sites are tw o very popular destinations located w ith in the study area tha t draw tourists coming from Canada and in te rna tiona lly year-round. The study area is bisected by three m ajor highways, namely the Trans-Canada Highway 1, H ighway lA , and H ighway 93, and includes several other transportation corridors. The Trans-Canada H ighway 1 has high volumes o f tra ffic year-round. Add itiona l details o f the study area can be found in Paquet et al. (1996) and Callaghan (2002).
2.2. Environmental data
Several spatial datasets, includ ing elevation, aspect, slope, land cover, and tra il and road networks were used to characterize the study area’s physical and b io tic environments. A 30 m^ spatial resolution d ig ita l elevation model (DEM) and the tra il and road ne tw ork datasets were provided by Banff and Kootenay National Parks. Aspect and slope were derived from the DEM using the Spatia l Analyst extension o f ArcMap 9.2 (ESRi, 2009). A 30 m^ spatial resolution vegetation iand-cover map includ ing 16 classes generated from Landsat Thematic Mapper remote sensing images was

2376 M. Musiani et al. / Ecological Modelling 221 (2010) 2374-2387
Alberta
British Colum bia S r ' \ '
Banff National Park x
Lake Louise
Legend
■ Town
Road
study Area
i i Provincial Boundary
I I Protected Area
0 510 20 30 40 50] Kilometers
Fig. 1. Location o f the study area w ith in Banff and Kootenay National Parks w ith in the Central Rocky M ountains o f Canada.
provided by the Foothills Research Institu te Grizzly Bear Research Program (M cDerm id et al., 2009).
Two resource selection function (RSF; Boyce and McDonald, 1999; M anly et al., 2002) models for elk and grizz ly bears, respective ly, were also used in th is project to characterize the probable locations o f elk and grizz ly bears on the landscape. RSFs were used to model each species’ preferred habitats (i.e., the relative proba b ility o f selecting a habitat) in the study area in a Geographic In form ation System (GIS). A used-available logistic regression RSF sampling design was employed where used locations were defined by locations provided by Global Positioning System (GPS) radio collars tha t were placed on ind iv idua l elk and grizz ly bears in the study area. Details on these datasets o f GPS locations can be found in Hebblewhite et al. (2008) for elk and in Garshelis et al. (2005) for g rizz ly bears. Habitat characteristics o f w ild life GPS locations were compared to characteristics at 10,000 random ly located points, w h ich were produced w ith the H aw th ’s Tools Extension (Beyer, 2004) inArcGIS 9.2 (ESRI, 2009) and represented available locations in the study area (Nielson et al., 2004).
Habitat characteristics used in elk and grizz ly RSE models included canopy closure, the ratio o f deciduous to coniferous trees, land-cover type, the annual m axim um norm alized difference vegeta tion index (NDVI), annual NDVI range, distance to roads, distance to facilities, distance to campgrounds, distance to trails, aspect (five classes: flat, north, south, east, west), elevation, and slope. A Spearm an’s rank corre lation (Zar, 1984) was calculated fo r all variables considered in each o f the models (elk and grizz ly bear). I f the corre la tion coefficients fo r any tw o variables were greater than 0.7, these variables were considered h igh ly correlated and removed
from fu rthe r analyses (M anly et al., 2002). Eor each species (e lk and bear), a logistic regression analysis was conducted on a set o f candidate models tha t included d iffe rent combinations o f the a b ove - described habitat variables. Akaike’s In form ation Criteria (AIC), an in fo rm ation-theore tic approach, was used to select the logistic regression m odel tha t best predicted species occurrence (Burnham and Anderson, 2002; Anderson and Burnham, 2002; Johnson and Omland, 2004; Stephens et al., 2005).
The elk and grizz ly bear RSE models were validated. Eor both species, linear regression R ̂ values calculated between each w ith held subset o f data and the model predictions, using 4/5 o f data, were significant (n = 5 iterations, P< 0.001), and close to 1 (average value o f 0.993 for elk and 0.899 fo r grizzlies) indica ting tha t the models were valid according to johnson et al.’s (2006) criteria. Valid elk and grizz ly bear RSEs were used to generate maps o f the relative p robab ility o f habitat selection o f elk and grizz ly bears across the study area during the summer (i.e., the study period) using Raster Calculator InArcGIS 9.2 (ESRI, 2009).
2.3. Human presence data
Human presence was determ ined by using tw o datasets. The firs t one was gathered by Pacas (1996) w ho categorized roads and tra ils w ith in the study area in to one o f six human-use classes based on relative use (Table 1). Pacas’ classes 1 and 2 represent the Trans- Canada H ighway 1 and all other roads, respectively, w h ile classes 3 -6 represent high-use to low-use trails. Secondly, data on in d ividuals, groups or cars orig ina lly collected by Parks Canada and A lberta Economic Development and Tourism A u th o rity using tra ffic and tra il counters at d iffe rent en try points in to Banff and Kootenay National Parks were com piled to assess levels o f and changes in tra ffic by hour. By com bining both datasets, human use on all tra ils and roads in the study area and its hourly changes was characterized (T ab le !).
2.4. Den locations and home ranges o f w o lf packs
GPS collar data acquired during the w in te r and summer seasons between 2002 and 2004 from 15 wolves belonging to five packs were used to iden tify w o lf den locations and home ranges. The locations were collected at 15-m in, ha lf an hour, 1-h, or 2-h intervals, depending upon some known lim ita tions o f the satellites’ signal, on varia tion in vegetation and topography, and on the a b ility to compute and record locations by the GPS collar units (Hebblewhite et al., 2007). An analysis o f the qua lity and frequency o f these GPS locations revealed tha t the signals recorded at 2-h intervals were consistent and unbiased (according to the de fin ition o f Hebblewhite et al., 2007) and were therefore retained for fu rther analyses.
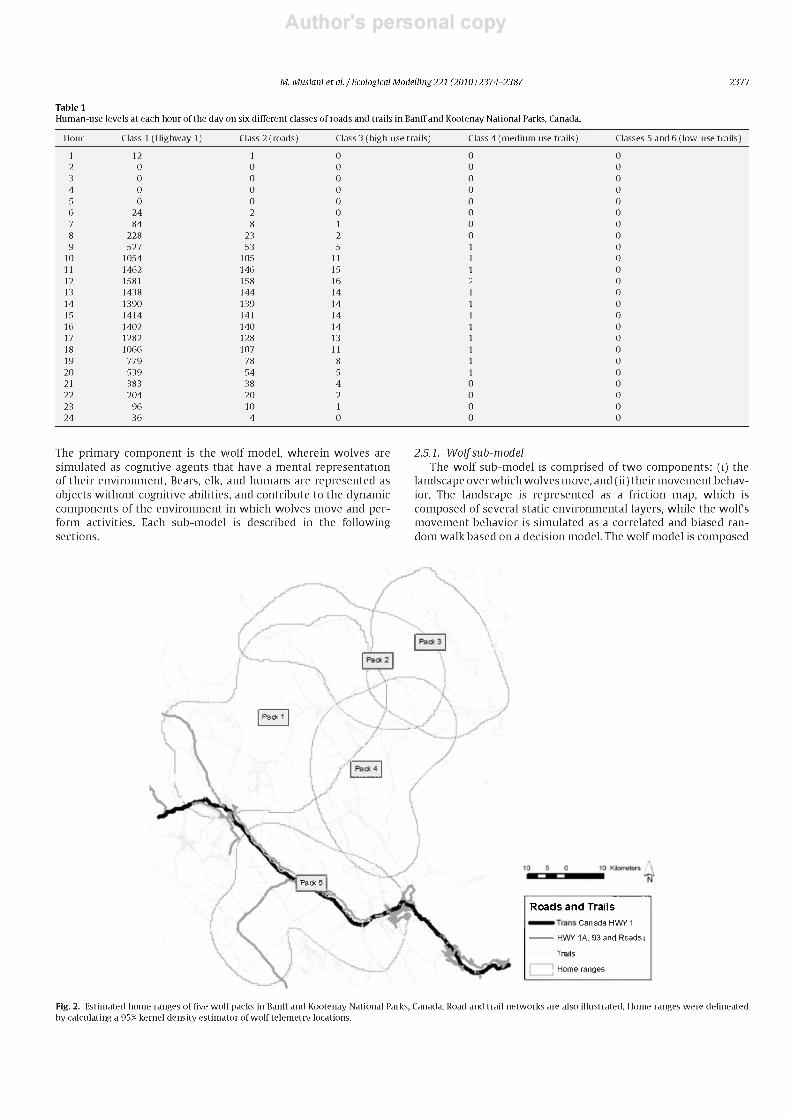
Home ranges were delineated by calculating a 95% kernel dens ity estim ator w ith a sm oothing factor o f 7000 m (Seaman and Powell, 1996) o f the w o lf te lem etry data using H aw th ’s Tools (Beyer, 2004) InArcGIS 9.2. Dens were detected visually by id en tify ing the m axim um concentration o f observed w o lf locations w ith in the 95% kernel polygon. The location o f dens was la ter confirm ed by fie ld observations. The home ranges o f w o lf packs 1 and 5 are traversed by highways (Eig. 2). Pack 1 contains a small segment o f H ighway 93 and H ighway 1 in the southwest part o f the home range, whereas Pack 5’s home range is lite ra lly sp lit by H ighway 1, lA , and 93.
2.5. Conceptualization and implementation o f the ABM model
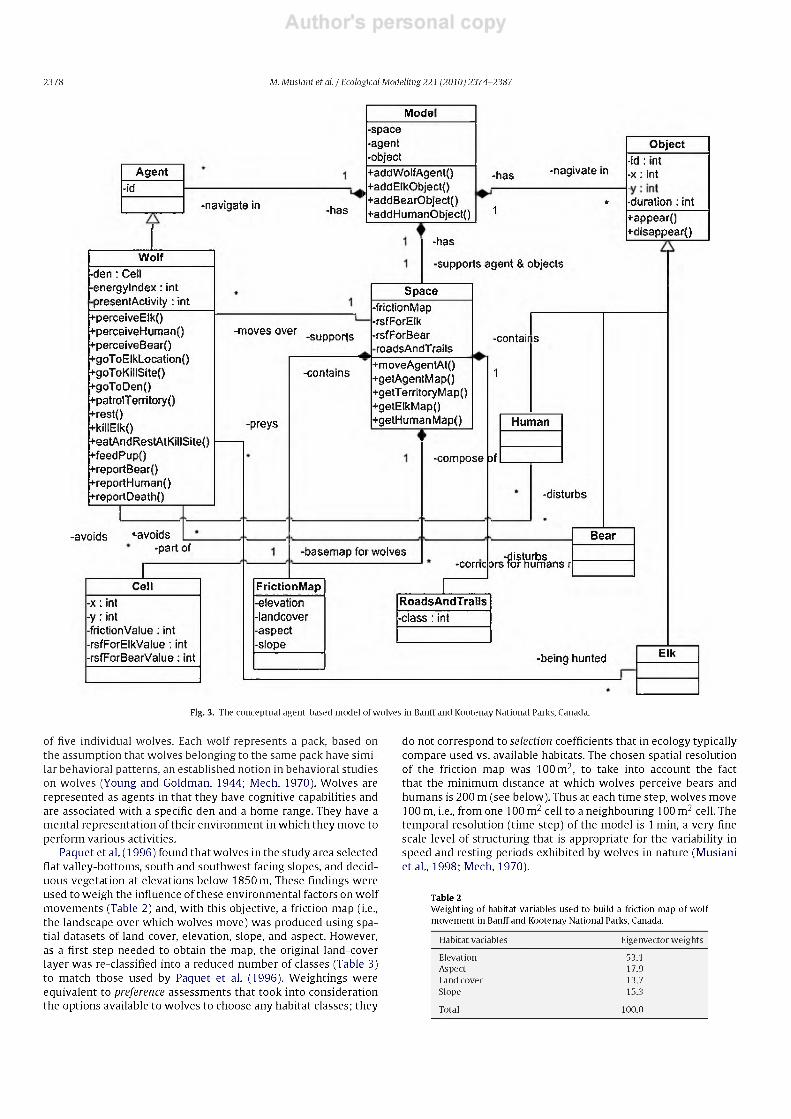
The ABM model developed in th is study consists o f four in te rrelated sub-models for wolves, bears, elk, andhumans (Eig. 3).
M. Musiani et al. / Ecological M odelling221 (2010) 2374-2387 2377
Table 1Human-use levels at each hour o f the day on six d iffe rent classes o f roads and tra ils in Banff and Kootenay National Parks, Canada.
Hour Class 1 (H ighway 1) Class 2 (roads) Class 3 (high-use tra ils) Class 4 (m edium use tra ils ) Classes 5 and 6 (low-use tra ils)
1 12 1 0 0 02 0 0 0 0 03 0 0 0 0 04 0 0 0 0 05 0 0 0 0 06 24 2 0 0 07 84 8 1 0 08 228 23 2 0 09 527 53 5 1 0
10 1054 105 11 1 011 1462 146 15 1 012 1581 158 16 013 1438 144 14 1 014 1390 139 14 1 015 1414 141 14 1 016 1402 140 14 1 017 1282 128 13 1 018 1066 107 11 1 019 779 78 8 1 020 539 54 5 1 021 383 38 4 0 022 204 20 2 0 023 96 10 1 0 024 36 4 0 0 0
The prim ary component is the w o lf model, where in wolves are sim ulated as cognitive agents tha t have a m ental representation o f th e ir environm ent. Bears, elk, and humans are represented as objects w ith o u t cognitive abilities, and contribute to the dynamic components o f the environm ent in w h ich wolves move and perform activities. Each sub-model is described in the fo llow ing sections.
2.5.3. W olf sub-modelThe w o lf sub-model is comprised o f tw o components: (i) the
landscape over w h ich wolves move, and (ii) the ir movem ent behavior. The landscape is represented as a fric tion map, w h ich is composed o f several static environm enta l layers, w h ile the w o lfs movem ent behavior is sim ulated as a correlated and biased random w a lk based on a decision model. The w o lf model is composed
P8C>( 1
PacSc 5
Roads and TrailsCanada HWY 1
HWY 1A. 93 and Roads j
Trails
: Home ranges
Fig. 2. Estimated home ranges o f five w o lf packs in Banff and Kootenay National Parks, Canada. Road and tra il networks are also illustrated. Home ranges were delineated by calculating a 95% kernel density estim ator o f w o lf te lem etry locations.
2378 M. Musiani et al. / Ecological Modelling 221 (2010) 2374-2387
Agent-id
•den : Ceil -energylndex; int presentAclivity : int
J.W olf
Mode-space-agent-object
-navigate in -has
+addWoifAgent() ^+addE!kObject() +addBearObject() +addHumanObject{)
+perceiveElk()+perceiveHuman()+perceiveBear()+goToElkLocationC)+goToKillSite()+goToDen()+patrolTerritory()+rest()+killElk()+eatAndReslAtKillSile()+feedPup()+reportBear()+reportHuman()+reportDeath()
-avoids '^avoids
-moves over -supports
-frictionMap-rsfForElk-rsfForBearroadsAndTraiis
-preys
-part of
Cell-X ; int -y : int■frictionValue : int -rsfForElkValue; int -rsFcrBearValue: int
-contains
Object
-has -naglvale in■Id : int -X : int
1* ■duration : int
t-appearOFdlsappearO
-has
-supports agent & objects
Space
+moveAgentAt()+getAgentMap()+getTerrltoryMap()+getElkMap()+getHumanMap()
-basemap for wolves
-compose Df
-corric ors
FrictionMap -elevation -landcover -aspect -slope
-contains
1
Human
-disturbs
-disturbs S for num<umans r
Bear
RoadsAndTraiis-class : int
-being hunted Elk
Fig. 3. The conceptual agent-based model o f wolves in Banff and Kootenay National Parks, Canada.
o f five ind iv idua l wolves. Each w o lf represents a pack, based on the assumption tha t wolves belonging to the same pack have s im ila r behavioral patterns, an established no tion in behavioral studies on wolves (Young and Goldman, 1944; Mech, 1970). W olves are represented as agents in tha t they have cognitive capabilities and are associated w ith a specific den and a home range. They have a m ental representation o f th e ir environm ent in w h ich they move to perfo rm various activities.
Paquet et al. (1996) found tha t wolves in the study area selected fia t valley-bottom s, south and southwest facing slopes, and deciduous vegetation at elevations below 1850 m. These findings were used to weigh the influence o f these environm enta l factors on w o lf movements (Table 2) and, w ith th is objective, a fric tion map (i.e., the landscape over w h ich wolves move) was produced using spat ia l datasets o f land cover, elevation, slope, and aspect. However, as a firs t step needed to obtain the map, the orig inal iand-cover layer was re-ciassified in to a reduced num ber o f classes (Table 3) to match those used by Paquet et ai. (1996). W eightings were equivalent to preference assessments tha t took in to consideration the options available to wolves to choose any habitat classes; they
do not correspond to selection coefficients tha t in ecology typ ica lly compare used vs. available habitats. The chosen spatial resolution o f the fr ic tion map was lOOm^, to take in to account the fact tha t the m in im um distance at w h ich wolves perceive bears and humans is 200 m (see below). Thus at each tim e step, wolves move 100 m, i.e., from one 100 m^ ceil to a neighbouring 100 m^ ceil. The tem poral resolution (tim e step) o f the model is 1 m in, a very fine scale level o f s tructuring tha t is appropriate for the va riab ility in speed and resting periods exhib ited by wolves in nature (M usiani et ai., 1998; Mech, 1970).
Table 2W eighting o f habitat variables used to bu ild a fric tion map o f w o lf m ovement in Banff and Kootenay National Parks, Canada.
Habitat variables Eigenvector weights
Elevation 53.1Aspect 17.9Land cover 13.7Slope 15.3
Total 100.0

M. Musiani et al. / Ecological M odelling221 (2010) 2374-2387 2379
Table 3Reclassification o f the Iand-cover map to match the classes used by Paquet et al. (1996) in th e ir fr ic tion model o f w o lf movements.
New class Old class Preference
1 Coniferous (Douglas-fir, pine, spruce) 84.22 Aspen (m ixed forest and treed w etland) 2.83 Meadows (shrubs) 7.24 Grassland (herbs) 1.25 Barren land, snow/ice 0.86 W ater 3.8No data Cloud, shadow
W hitting ton et ai. (2004) compared three types o f simuiated waiks w ith actuai woives’ movements. The authors conciuded tha t the best f it was obtained w ith a ‘biased correiated random w a ik ’ in w h ich the next ceii is seiected w ith m in im a i random tu rn ing angies from the direction o f the iast ceii, as w e ii as m in im a i random tu rn ing angies towards a preferred destination. The directionai vector can be chosen random iy or preferentia iiy. in th is study, we assumed that woives choose where to go purposefuiiy (e.g., a w o if seeks some known eik density patches) and tha t th e ir activity was not com piete iy random (Bartumeus et ai., 2005). However, to accurateiy simuiate animai movements on the iandscape, sev- erai other factors m ust be taken in to account at the same tim e, inciud ing preferred direction, a w e igh t factor indica ting attraction strength towards the d irectionai vector, and a habitat qua iity index, w h ich represents the cum uiative su itab iiity o f aii habitat variabies (Topping et ai., 2003).
We therefore appiied the theoreticai approach o f Topping et ai. (2003) and methods firs t deveioped for woives by W h ittin g to n et ai. (2004), where in woives pick a random ceii w ith in eight neighbouring ceiis using in fo rm ation regarding the directions o f the ir previous m ovem ent and tha t towards a destination, and the habitat qua iity o f these ceiis (often referred to as its inverse: fr ic tion vaiue). Fig. 4 dispiays how in th is study a w o if agent seiects the next ceii based on its past iocation and direction o f movement, a directionai vector indica ting preference towards a destination (dashed arrow), and a w e igh t factor indica ting habitat su itab iiity (grey shade), in the figure’s sampie case, habitat su itab iiity is higher in darkergrey ceiis. This m ethod is s im iia r to the ABM o f Fiorida panther movem ent deveioped by Cramer and Portier (2001).
current position
last posilion (one step back)
Position 1 steps back
two
Position ,,,^ three steps oack
Fig. 4. Illus tra tion o f the correlated and biased random w a lk model to sim ulate how wolves move on the landscape.
The w o ifs movements are determ ined by the spatiai d is tribu tion o f resources (such as prey, fo r exampie) and o f threats to safety (such as the presence o f humans or bears), and by the in te r- nai m otiva tion and activ ity woives are engaged in. The activities simuiated in our modei (Fig. 5) are hunting, pa tro iiing te rrito ry , feeding pups, and resting. The modei encompasses the period from A p rii 16 to October 15, w h ich is homogenous fo r key ecoiogicai factors invo iv ing woives and other organisms affecting woives. During th is period, in the study area woives are centrai piace foragers around a den and/or rendezvous sites for the pack; the ievei o f human use is orders-of-m agnitude greater than tha t o f the w in te r season; grizz iy bears are present, whereas in the w in te r they are in hibernation; and fina iiy, m ig ra tory and non-m ig ratory eik are d istribu ted depending on piant phenoiogy characteristic o f the summer (Hebbiewhite et ai., 2008).
Behaviorai ruies for woives were derived from the scientific iit- erature, from experts’ opinions, and from our fie id observations (Fig. 5). Each w o if agent (representing a pack) was assigned an energy index vaiue tha t ranged from 0 to 100. A t every m inute, w h ich corresponds to the tem porai resoiution (tim e step) o f the modei, the energy index vaiue decreases based on th is equation (energyt+i = e n e rg y t-0 .3 ). The vaiue 0.3 is given by: 100/14 days/24 h to simuiate the fact tha t the m orta iity o f a w o if m ight happen after 14 days w ith o u t food, a period consistent w ith the iit- erature (Mech, 1970). W hen a w o if agent finishes eating, i t reaches satiation and its energy vaiue is 100; when the energy index reaches 0, the w o if dies. W oives embark from the ir dens towards an intended destination picked random iy w ith in the pack’s home range, and then woives attem pt to move towards tha t d irection using the path w ith the ieast fric tion . They are attracted to tra iis for ease o f navigation, bu t do not use them i f the encounter rate w ith humans increases. W o if preference for tra iis at iow human-use iev- eis is known from the iite rature and documented aiso in the study area (W h itting ton et ai.,2005; Paquet etai., 1996; Caiiaghan, 2002). W hen woives reach the targeted destination, they aim at another iocation as a new destination.
As woives patro i the ir te rrito ry , they are aiiowed to deviate towards a food source (exampie, eik). Practicaiiy, when th e ir energy index is be iow 80% and they perceive the presence o f eik w ith in a 3 km range, woives move towards the eik iocation. The threshoid o f 80% for the energy index was seiected based on a sensitiv ity anai- ysis o f the modei, w h ich demonstrated tha t woives couid not start searching for food at iow er energy ieveis or they w ou id risk starvation due to a iack o f tim e to hunt successfuiiy. W hen pursuing eik, there is a 30% probab iiity o f a k iii, w h ich is consistent w ith em p iri- cai data on hunting success (Mech, 1970; Peterson and Page, 1988; Post et ai., 1999).
i f a w o if is successfui at k iiiin g an eik, it w i i i start consuming the carcass and keep eating for 6.5 h. This duration is consistent w ith the spatio-tem porai ciusters o f w o if iocations tha t are attributabie to eik k iiis in western Canada and in the study area in particuiar, for the sum m er denning period (Hebbiewhite et ai., 2005a; Webb et ai., 2008), w h ich is the focus o f our m odeiing effort. Once a w o if has finished eating, it returns by the shortest ieast fr ic tion route possibie to the den to feed the pups. A fte r a successfui hunting bout, a w o if w ii i make re turn trips to the k ii i to coiiect more food; such food is often regurgitated for the pups at the den site (Harrington and Mech, 1982). in the sum m er denning period, these re turn trips for ferry ing food back to the pups may aiso be separated by about 6 -7 h o f eating, feeding pups, and resting both at dens and k iiiin g sites (Hebbiewhite et ai., 2005a). i f a w o if does not encounter any eik w h iie pa tro iiing its te rrito ry , it returns to its den after 4 days to attend to pups.
W hiie a w o if is pa tro iiing its te rrito ry , i f i t perceives the presence o f any human or bear w ith in a 200 m range, it stops its ac tiv ity and remains at the same iocation for the duration o f the bear or

2380 M. Musiani et al. / Ecological Modelling 221 (2010) 2374-2387
Abandon
killYesBring rnore
foods for pups (after 6-
7 hours
feeding)
Go to den
to feed
pupsNo
Go to den
to take
care pups
Killer^ Elk
DEN
Elk w ith in 3km
G o t o Elk
loca tio n
B ear o r H um an
w ith in 200m
Bear o r H um an
w ith in 200m
Resting
11-13
ho u rs
14 days
w ith o u t
foo ds
4 days
w ith o u t
fo o d
E ating and
re s tin g 6-7 h o urs
F ind random
lo ca tio n in hom e
range to pa tro l
Report:-chasing-k illin g-d is tu rba nce-dea th
Fig. 5. Conceptual decision model o f the w o lf agent w hen m oving th rough the landscape.
human disturbance. The 200 m distance w here in wolves are s ignificantly influenced by humans or bears were consistent w ith studies conducted on hu m an -w ild life interactions. Hikers can e lic it equal or more intense behavioral and metabolic responses from w ild life than vehicles (M acArthur et al., 1982; Freddy et al., 1986; Holmes et al., 1993; Andersen et al., 1996; McLellan and Shackleton, 1988). Previous research has focused on the distance necessary to provoke a response from approaching pedestrians (i.e., by fleeing) in various species o f large mammals (Schultz and Bailey, 1978; Cassirer et al., 1992; Papouchis et al., 2001; Karlsson et al., 2007). Karlsson et al. (2007) found tha t the distance required to provoke a response in wolves ranged between 17 and 310 m. However, i t is unclear how varying human activ ity levels may affect fligh t distances. In any case. W isdom et al. (2004) found tha t the probab ility o f elk fleeing declined rap id ly when hikers were beyond 500 m.
W olves’ hunting success and consum ption o f prey can be disrupted due to the presence o f com petitors such as bears (Hebblewhite and Smith, 2010). In the model, wolves are influenced by grizz ly bears w h ile they navigate (as explained above) or w h ile they consume prey. This is sim ulated using the fo llow ing rule: i f a w o lf is consuming a carcass at a k il l site, it w i l l abandon the site i f a bear appears w ith in a range o f 200 m. However, the w o lf w i l l keep track o f the abandoned k il l location for 2 weeks and it w il l re turn to the site (i.e., to eat some leftovers) i f its energy threshold is below 30%.
2.5.2. Bear and elk sub-modelsThe elk and bear sub-models use the RSFs described previously
to estimate the relative probab ility o f an anim al selecting a specific resource u n it (M anly et al., 2002; Johnson et al., 2006). Both bear and elk sub-models are o f 100 m^ spatial reso lu tion to be com patible w ith the w o lf model. Each RSF was re-classified in to three bins o f selection probab ility scores: low (0.0-0.33), m edium (0.34-0.66) and high (0.67-1.0). Based on the RSF selection probab ility bins, 24
elk herds (each herd representing about 25 elk) and 21 grizz ly bears were assigned a location in the landscape. The to ta l num ber o f elk and bears was estimated by consultation w ith Banff and Kootenay National Parks personnel and w ith w ild life experts w ork ing in the study area. Each bear and elk is assigned a location on the landscape based on the above selection probab ility b in values (i.e., a bear was 3 tim es more like ly to occur w ith in a p ixe l w ith a high RSE score than low RSE score), and remains there for approxim ately 30 -40 m in. W hen tha t duration is over, the bear or elk disappears from that location, and reappears elsewhere based again on the RSE values, and then stays there another 30 -40 m in (i.e., the tim e step fo r elk and bear presence).
This m ethodological approach lacks realism; however, i t represents a reasonable means to model anim al d is tribu tion estimates available, i.e., RSEs when m odeling animal m ovem ent is not feasible due to the lack o f data. RSEs have been w ide ly used over the last decade to model the probab ility o f an animal selecting a resource u n it (M anly et al., 2002; Johnson et al., 2006). Strickland and McDonald (2006) describe a w ide range o f applications o f resource selection statistics. In th is study, bears and e lk appear and disappear on the landscape proportiona l to the relative probab ility o f selecting a habitat.
2.5.3. Human sub-modelIn the human sub-model, human presence, represented as an
indiv idual, a group o f humans or a car carrying humans is distribu ted along roads and tra ils at every hour based on the ir relative usage classes (Table 1). Once they are located on a road or tra il, they rem ain there for 1 h. A 200 m buffe r zone o f influence is delineated around each road and tra il for tha t hour, a distance tha t is consisten t w ith the detection capacity o f wolves, as i t is explained above. Increases o f human presence o f 5 tim es (H5X) and 10 tim es (H I OX) tha t o f current estimated levels o f presence in the study area (H IX ) were simulated.

M. Musiani et al. { Ecological M odelling221 (2010)2374-2387 2381
Table 4Percentage o f tim e actual (observed) and sim ulated w o lf packs spent at the den and not trave ling at norm al estimated levels o f human presence (H IX ) on roads and tra ils, and 5 tim es (H5X) and 10 tim es (H lO X) norm al estimated levels o f human presence in Banff and Kootenay National Parks, Canada.
Time at den Time not traveling
Observed (%) H1X(%) H5X(%) H10X(%) Mean(%) SD(%) Observed (%) H1X(%) H5X(%) HlOX (%) Mean (%) SD (%)
P ackl 12.41 2.62 2.11 2.11 4.81 5.07 78.30 34.53 33.79 32.92 44.88 22.29Pack 2 0.56 2.62 2.57 2.80 2.14 1.06 91.63 37.42 37.24 38.06 51.09 27.03Packs 1.99 3.35 2.94 3.54 2.95 0.69 89.72 35.31 35.86 36.96 49.46 26.85Pack 4 4.01 2.20 1.93 2.25 2.60 0.95 90.59 32.28 34.07 33.10 47.51 28.73Packs 4.73 1.33 0.78 0.51 1.84 1.96 88.70 35.49 77.87 94.86 74.23 26.76
Mean 4.74 2.42 2.07 2.24 87.79 35.00 43.76 47.18SD 4.59 0.74 0.82 1.12 5.41 1.86 19.12 26.75
2.6. Simulation fram ework
Seven sets o f parameters were used in the model o f w o lf behavior: num ber o f bears (12, 21, and 30), num ber o f elk herds (12, 24, and 36), and human presence (H IX , H5X and H I OX). To account for environm enta l stochastlclty and for va riab ility In the model ou tputs, runs w ith each set o f parameters were replicated 15 times. The s im ulation results correspond to the average o f the values obtained In these 15 replicates, w ith error bars representing the standard error.
The model has a reporting mechanism describing the Instances o f various events at each tim e step o f 1 m in. Im portant outputs of the model Include the trajectories ofwolves, w h ich are represented
as a series o f po in t locations (x, y coordinates and tim e stamp). This allowed comparison w ith the observed dataset for GPS-collared wolves, w h ich Is also comprised o f po in t locations. For th is purpose, po in t locations for sim ulated wolves were sub-sampled at 2-h Intervals s im ila r to the tem poral resolution for GPS-collared wolves. The model also reports other critica l parameters, such as when a w o lf agent crosses a h ighway or tra il, encounters a human or a bear during either navigation or feeding on prey, chases an elk or k ills It, rests, leaves the den, or dies. The model was Im plemented In JAVA program m ing language using NetBean IDE w ith RePast 3.1 lib ra ry (N orth et al., 2006). The RePast lib ra ry was used p rim a rily to visualize the outputs and contro l the s im ulation engine.
(a) O bse rved w o lf locations
/ I I Hnnar.ngM
(b)
(c) S im u la ted w o lf loca tions H5XV
S im u la ted w o lf loca tions H IX
' X
f - - i t
(d) S im u la ted w o lf loca tions H1 OX
1 1 hoire r4j»}«sj
Pack / \‘ 1 / _ * * \
2 f * ' 13
\ * r \ /
5v J
I I hftineti
Fig. 6. W o lf locations w ith in the study area obtained from : (a) w o lf GPS radiocollar points acquired from 2002 to 2004, (b) sim ulated w o lf locations w ith estimated actual human presence (H IX ), (c) sim ulated w o lf locations w ith human presence 5 tim es estimated actual human presence (H5X), and (d) sim ulated w o lf locations w ith human presence 10 tim es estimated actual human presence (HlOX).

2382 M. Musiani et al. / Ecological Modelling 221 (2010) 2374-2387
H um an use level
K5X
H um an use level
H um an use level H um an use level
Fig. 7. Frequency o f w o lf-h u m a n encounters on roads at varying levels o f human presence for: (a) Pack 1 and (b) Pack 5; sim ulated dura tion o f w o lf-h u m a n interaction on roads at varying levels o f human use for: (c) Pack 1 and (d) Pack 5. The results represent an average o f 15 replicates; e rro r bars represent the standard deviation.
2.7. Model validation
The va lida tion o f the model was perform ed by comparing the sim uiated tra j ectories o f w o lf packs w ith in five know n home ranges w ith the observed trajectories o f real wolves. Follow ing Tew and Macdonald (1994), nonparam etric u tiliza tio n d is tribu tion analyses were appiied to measure the overlap between the sim uiated and observed w o if iocations at 2-h tim e intervals. Using ArcMap 9.2, the area encompassing all w o if home ranges was divided in to a g rid o f 426 cells measuring 4 km x 4 km (Mech, 1970) and covering five home ranges in such a way tha t each home range was covered by at least f if ty grid cells. This ceii size satisfies the conditions suggested by Doncaster (1990) tha t the size o f the cells m ust be large enough tha t some cells contain several fixes, bu t not so large as to obscure the overall configuration o f the range. The v is it fre quency o f sim uiated and observed w o if iocations was calculated fo r each ceii. Spearman corre lation (tw o-ta iled ) was used for testing the association between these tw o measures over aii grid ceiis, representing correlations in range use. A high corre lation im plies not on ly a high overlap, bu t aiso s im ilar spatial u tiliza tion . A perm uta tion test im plem ented in SPSS version 10.0 was applied to test w hether the observed value o f Spearman’s rho was sign ificantiy d iffe rent from zero.
We also compared the percentage o f tim e spent at and around dens (200 m buffers) fo r observed woives and for wolves simuiated at the three levels o f human presence (H IX , H5X and HlOX). The 200 m vaiue was consistent w ith wolves’ perception o f the environm ent, as explained previously, i t is like ly tha t woives consider themselves in p ro x im ity o f a den at such distance, s im ilar to how they perceive p ro x im ity to a disturbance activ ity by a human or a bear. W ith s im ilar approaches, we compared the percentages o f tim e spent not traveling (speed < 1 km /h) for the five packs at the
observed and the three sim ulated levels o f human presence. We used th is 1 km /h threshold as wolves are described in the lite ra ture as ‘trave ling ’ at speeds o f higher than 1.5 km /h (M usiani et al., 1998; Mech, 1970,1994). Differences were evaluated using a Friedman test, w h ich provides Chi-square and associated P-values. We also reported mean and standard deviation values o f percentages for time at den and time not traveling.
3. Results and discussion
3.1. Distribution o f observed w o lf locations and locations simulated w ith increasing human use
Fig. 6 shows the d is tribu tion o f observed w o lf locations taken regularly at 2-h intervals (Panel a) and the d is tribu tion o f sim ulated w o if locations aiso at 2-h intervals w ith estimated typica l human presence (H IX ), projected 5 tim es human presence (H5X), and projected 10 tim es human presence (H lOX) (Panels b, c, and d, respectively). A visual comparison o f sim uiated locations draws a tten tion to s im ilar d is tribu tions as those observed w ith real wolves, w ith some notable exceptions. A closer examination o f observed and simulated w o lf iocations w ith estimated human presence H IX (Panels a and b, respectively) reveals that the observed iocations fo r Pack 5 were clustered around a valley- bo ttom tha t contains highways and tra iis used by humans. The observed iocations fo r Pack 1 were aiso clustered around a valley- bo ttom that contains in th is case a ne tw ork o f tra iis (see Fig. 2). This result indicates tha t our m odel underestimates wolves’ selection for valley-bottom s at moderate human presence ieveis, like ly due to ease o f m ovem ent and to the presence o f im portan t resources for woives in these iocations, a phenomenon tha t has been documented in the study area (Paquet et ai., 1996; Caiiaghan,

M. Musiani et al. / Ecological M odelling221 (2010) 2374-2387 2383
2002). However, w ith sim ulated increased human presence, the s im ilarities between sim ulated and observed locations increased, especially for Packs 1 and 5, w h ich have home ranges tha t encompass areas w ith re la tive ly higher human use (Panels c and d). Our model therefore indicates tha t when human use is high or very high (H5X and H I OX), w o lf locations m aybe clustered at valley-bottom s, where most basic resources for the species are concentrated. In fact, valley-bottom s are characterized by concentration o f prey, w ater and security cover fo r wolves, especially in the study area (Percy, 2003; Shepherd and W hitting ton , 2006). Under these c ircumstances wolves m ight travel less to other less critica l areas o f the ir home ranges, like ly because m oving more increases the chance o f encountering people (see below).
In addition to a visual comparison, an analysis o f spatial u t ilization w ith in home ranges suggests correspondence between observed and sim ulated w o lf locations over grid cells covering each o f the five w o lf pack home ranges. W ith in cells, locations for real wolves and for sim ulated wolves experiencing estimated typica l human presence (H IX ) are h igh ly correlated (Spearman’s rho 0.566, P< 0.001), w h ich suggests correspondence in range use and high overlap (i.e., s im ila r u tiliza tion ). The corre lation values fu rthe r increase between observed wolves and sim ulated wolves experiencing levels o f human presence 5 tim es (H5X) and 10 times (H lOX) higher (Spearman’s rho 0.589, P < 0.001 and Spearman’s rho 0.612, P< 0.001, respectively). However, analyses conducted
• HIX
• HSX
■ HlOX
Fig. 8. Simulated frequency o f w o lf-h u m a n encounters on tra ils at varying levels o f hum an use fo r each w o lf pack (Packs 1, 2, 3, 4 and 5). The results represent an average o f 15 replicates; e rro r bars represent the standard deviation.
separately for each home range and pack demonstrated tha t such increases w ith higher human presence are not a pattern common to all packs. Correlation values increase between observed wolves and sim ulated wolves o f Pack 2 w ith human presence increas
uPack 4
\ 0 24 32■Kilometers
H om e ranges w ith hum an 1X
' H om e ranges w ith hum an 5X
* H om e ranges w ith hum an 10X
Fig. 9. Shrinkage o f w o lf home ranges associated to d iffe rent levels o f human presence.

2384 M. Musiani et al. / Ecological Modelling 221 (2010) 2374-2387
ing 5 tim es (HSX) and 10 tim es (HlOX) (w ith Spearman’s rho peaking at 0.726, P< 0.001). S im ilarly, corre lation values increase w ith human presence for Pack 5, w ith Spearman’s rho peaking at 0.651 (P< 0.001). However, corre lation values did not increase w ith increasing human presence for Packs 1, 3 and 4.
Finally, Table 4 shows the va lida tion results for tim e spent at dens and for tim e spent not trave ling by wolves. Percentage o f tim e spent at and around dens (200 m buffers) for observed wolves and for wolves sim ulated at three levels o f human use did not vary across packs (n = 5, Chi-square = 2.63, P= 0.452), or across the observed and the three sim ulated levels o f human use (n = 4. Chi- square = 5.72, P= 0.221). Therefore, there is f it between our model and the observed behaviors. Validation results were more variable fo r the analysis o f tim e spent not traveling. The five packs spent d iffe rent percentages o f tim e not traveling (speed < 1 km /h) at the
observed and the three sim ulated levels human use (n = 5. Chi- square =8.28, P= 0.041), largely due to the observed packs resting more than the simulated packs. Differences were also detectable w ith regard to traveling behavior across the observed and the three sim ulated levels o f human use (n = 4, Chi-square = 11.00, P= 0.027), largely due to Pack 5 spending less tim e traveling than the other packs. These va lida tion results are consistent w ith those explained above for the spatial d is tribu tion o f locations. There are discrepancies between our sim ulations and the observed patterns. As a general pattern, wolves seem to move less in rea lity than in our model, perhaps due to the ir reaction to high levels o f human use. Consistent w ith th is in te rpre ta tion , the pack experiencing the h ighest level o f human use (Pack 5) moves less than the o ther packs and, as explained above, has m ovem ent patterns consistent w ith those sim ulated w ith the highest human-use values.
4
3
JCo£ 2
O>n£ 101aO’>1oc41 d>£u.
•1
-2
IH IX
■ hSX■ HlOK
d
3S
3
2
15
1
05
0
GDing tc Elk l«4ticn
-05
■ HIX
■ H5X
■ HlOX
(c)
. mGoineto Elk Locatior Ealing at Xifijfte
(d)
■ HIX
■ H5X
■ HlOX
Going to Elk Location
100
BO
60
40
0
■ HlX
■ H5K■ HlOX
Going to Elk Location
Fig. 10. Frequencies o f human disturbance o f various w o lf activities tha t are im portan t fo r survival, includ ing finding prey (‘going to e lk location’), eating at k ill sites, going to k ill sites, and feeding pups (Panels a, b, c, d and e fo r Packs 1, 2 ,3 , 4 and 5, respectively) and effects on w o lf m o rta lity (Panel f) o f varying human-use levels. The results represent an average o f 15 replicates; e rro r bars represent the standard deviation.

M. Musiani et al. / Ecological M odelling221 (2010) 2374-2387 2385
3.2. Frequency and duration o f encounters w ith humans on roads and trails
The home ranges o f w o lf Packs 1 and 5 are traversed by h ighways. Pack I ’s home range includes a small segment o f H ighway 93 and H ighway 1, whereas Pack 5’s home range Is lite ra lly sp ilt by H ighway 1. Potentially, th is pack m ight be severely affected by humans, as there Is considerable tra ffic on H ighway 1 throughout the year. Fig. 7(a and b) shows the frequency o f encounters w ith humans on roads for Pack 1 and Pack 5, respectively. W ith human presence Increasing from current, to five and to ten tim es current levels o f human presence (H IX , HSX, HlOX), Pack I ’s encounters w ith humans on roads Increased; whereas, for Pack 5, encounters decreased at very high levels o f human presence (HlOX). The result fo r Pack 5 seemed counterin tu itive . However, In-depth Investiga tion revealed tha t In case o f sustained and continued human presence, the w o lf perceives and registers a single, bu t con tin ued encounter/disturbance event. Such an event Is the result of the Interaction between one w o lf agent (I.e., a pack) and several human obj ects appearing on consecutive occasions w ith in the same 200 m buffer zone o f the w o lf locations. Fig. 7 (Panels c and d) Illustrates th is no tion by h igh ligh ting how the duration o f w o lf-hu m a n encounters (and therefore the d isrup tion o f w o lf behavior) for both Packs 1 and 5 Increased w ith Increasing human presence. Therefore, for Pack 5 the frequency o f encounters decreased, bu t Its duration Increased (Fig. 7b and d, respectively). Another feature w o rth h igh ligh ting Is tha t the duration o f human-caused disruptions of Pack 5’s behaviors In it ia lly Increased sharply, and then moderately, w h ich m ight relate to an attenuation effect consistent w ith the m orta lity rate findings tha t are explained below.
Increased human presence affected w o lf movements not on ly on roads, bu t also on trails, w ith d is tinct patterns for each w o lf pack (Fig. 8). Compared to Packs 1,3,4 and 5, Pack 2 had higher encounter rate w ith people, like ly because o f Its small home range (1224 km ^), w h ich encompasses a concentrated ne tw ork o f trails. A t the other extreme. Packs 1 and 4 were the least affected, since they have larger home ranges (2085 and 1359 km^, respectively) and more options available to move to areas w ith low er tra il density.
3.3. Human influence on size o f w o lf home ranges
If there are high levels o f human presence on the landscape, wolves m ight be forced Into areas tha t are not op tim al In term s of prey density, and th is m ight have a significant effect on survival. In addition, under high human-use conditions wolves may not be able to hunt successfully, because humans m ight Interfere w ith hu n ting wolves or w ith the ir consum ption o f prey. Fig. 9 Illustrates these scenarios w here in the home range o f w o lf Pack 5 shrank v is ib ly as human presence Increased. Such human-caused effects on home range size m ight also result In decreased a b ility to use habitats frequented by w o lf prey, w ith patterns analyzed In detail below.
3.4. Disruption o f crucial activities and effects on survival
Fig. 10 Illustrates the frequencies o f human disturbance o f va rious w o lf activities tha t are Im portant fo r survival. Including find ing prey (going to elk location), eating at k il l sites, going to k il l sites, and feeding pups (Panels a, b, c, d and e for Packs 1, 2 ,3 ,4 and 5, respective ly). W hen the level o f human presence Increased to 10 times, the Impact on all w o lf activities Increased fo r Packs 2 (Fig. 10b) and 5 (Fig. lOe), w h ile on ly some activities were disturbed for the other packs (Fig. 1 Oa, c, and d). W o lf Pack 4 experienced litt le disturbance (Panel d), like ly because Its home range Is In ‘backcountry’ areas, less frequented by visitors. W o lf Pack 5 seemed to experience fewer Impacts when human presence was 10 tim es greater, com
pared to 5 tim es (Fig. lOe). A closer analysis Illustrates tha t tra ffic on tw o Im portant transportation routes present In the home range may cause Increased duration o f disturbance, w h ich Is perceived by Pack 5 as continuous disturbance, as explained previously. As a result. Pack 5 has lim ited tim e for hunting and for other c r it ical activities; circumstances tha t lead to Increased m orta lity o f this pack (Fig. lOf).
4. Conclusions
Recreation and transporta tion may have an array o f Immediate and long-term Influences on animal behavior even w ith in national parks (Boyle and Samson, 1985; Forman and Alexander, 1998; Trom bulak and Frlssell, 2000). Activ ities such as h ik ing and b ik ing on trails, and vehicle ac tiv ity on roads may affect a w ide range o f species such as for example In large mammals: moose (Yost and W righ t, 2001), deer (Freddy et al., 1986), bobcats (Lynx rufus) and coyotes (Canis latrans) (George and Crooks, 2006), b ighorn sheep (Keller and Bender, 2007), bison (Bison bison) and pronghorn (Antilocapra americana) (Taylor and Knight, 2003), and black bears (Ursus americanus) (Kasworm and Manley, 1990). However, the Impact o f human-caused behavioral changes In animals and on the ir survival Is often unknown.
ABM can assist In discovering knowledge gaps and can provide theoretical Insights by form aliz ing the components o f a system (for example, an ecosystem Including wolves and other species) and exploring the ir Interactions. This can be pa rticu la rly useful for Investigating the Impact o f behavioral changes by humans and the Identification o f adequate management practices to reduce this Impact. Such an approach Is clearly Illustra ted by Bennett et al. (2009) w ho Im plem ented a behaviora l-exp lic it ABM to explore w ild life species responses to patterns o f anthropogenic d is tu rbances to be used as a management too l In order to m in im ize the detrim enta l Impact on w ild life populations.
In attem pts to fu lf il l a s im ilar goal, the strength o f our model lies In Its ab ility to capture the outcome o f Interactions between wolves and humans at a fine tem poral scale (w ith human-use data gathered at every hour) and spatial resolution (In 100 m units), and at the Ind iv idual level. The perform ed sim ulations reveal tha t w o lf movements and behaviors are considerably affected by Increasing In tensity o f human presence. W olves have less tim e to search for prey, to hunt, to access and consume a prey Item, and to attend to the ir pups, w h ich m ight result In m orta lity . The most affected w o lf pack (Pack 5) Is the one whose den Is closest to an Im portan t transporta tion route (the Trans-Canada Highway 1) and to another highway. Overall, the model probably under-represents human Im pact because w o lf activities are resumed once encounters w ith humans are over, w h ich m ight not be the case In reality. In fact, a num ber o f studies have shown tha t human-caused d isruption o f animal behaviors m ight not be reversible, and forces animals to perm anently sh ift to other activities (Boyle and Samson, 1985; Forman and Alexander, 1998; Trom bulak and Frlssell, 2000). Even w ith th is under-representatlon o f human Impact, severe Impacts on w o lf behavior and also on survival were observed.
Despite the focus given to predators and wolves specifically (e.g., Soule et al., 2003), In most ecosystems humans arguably constitu te the most Im portan t keystone species. I.e., a species w ith effects on the ecosystem are greater than Its num erical representa tion or biomass (Paine, 1995). The no tion tha t humans are a keystone species Is not new (M cDonnell et al., 1993) and the effects o f humans on ecosystems at various troph ic levels are w e ll documented (Vltousek and Mooney, 1997). However, as Indicated by Castilla (1999), there Is an urgent need to Incorporate humans Into ecological studies and to understand the ir functional relationships w ith other organisms. Our study Indicates tha t In addition to playing a keystone role, humans may outnum ber w ild predators In most

2386 M. Musiani et al. / Ecological Modelling 221 (2010) 2374-2387
ecosystems, includ ing protected areas, therefore po ten tia lly producing even greater effects. Our results on the potentia l effects o f human presence on w o lf survival, through Interaction w ith other b io tic and physical variables, confirm em pirical findings obtained In the study area by Hebblewhite et al. (2005b), Percy (2003) and W h ittin g to n et al. (2005).
Despite some lim ita tions, the m odeling prototype developed In th is study fo r wolves may serve as a useful too l to test hypotheses about h u m a n -w o if Interactions, such as for de term in ing the level o f te rr ito ry fragm entation or the threshold o f human use In the study area beyond w h ich w o lf survival could be sign ificantly affected. It may guide decision-makers In designing adequate management strategies tha t are compatible w ith conservation o f mammals In National Parks and other areas w ith significant human presence. Such management strategies tha t could be Investigated Include lim itin g the access to certain tra ils during periods pa rticu larly c r itical to w ild life populations. Im proving the num ber and location o f h ighway crossing corridors to facilita te the m ovem ent and activities o f animals, and reducing the level o f fragm entation o f areas pa rticu la rly suitable to w ild life species.
Two areas o f fu rthe r developm ent are considered to refine the actual m odeling prototype. Firstly, a set o f more sophisticated rules could be Incorporated to bette r m im ic prey behavior based on knowledge gathered from behavioral ecology studies. Prey behaviors could also be dependent upon predator presence and activity, fo llow ing princip les o f p reda to r-prey theory. Secondly, the human m odule could be enriched by a representation o f movements and activities along the roads and tra ils based on decision rules o f cogn itive human agents rather than a static representation o f the ir presence/absence.
Acknowledgements
This project w ou ld not have been possible w ith o u t data or advice received from M ike Glbeau, Kathy Rettle, Gordon Stenhouse and C liff W hite, as w e ll as from Parks Canada and Alberta Sustainable Resource Development. Special thanks also go to all personnel, technicians and w ild life biologists w ho w orked In the fie ld to m onito r w ild life and humans In the study area, and to the fie ld staff and technicians w ho produced the geospatlal data used to characterize w o lf habitat. Tyler M uh ly helped In developing the resource selection function models for bears and elk, and Paul Paquet In p rov id ing In form ation for the developm ent o f the w o lf component o f the model. This research has been funded by ACA Challenge Grants In Biodiversity, Foothills Research Instltute-C hlsholm -D ogrlb Fire In itia tive grants, Sundre Forest Products LTD., Canon National Parks Science Scholarship for the Americas, University o f A lberta and Parks Canada through research funds allocated to Dr. Musiani, by a NSERC Discovery grant awarded to Dr. Marceau, a NSERC Collaborative Research and Development grant co-held by Dr McDermid, and by scholarships offered to Sk. Morshed A nw ar by the Department o f Geomatics Engineering, U n iversity o f Calgary. We thank Rick Smee, Darren Labonte, and James R. Allen, from Alberta Sustainable Resource Development (AB-SRD), Tom Daniels and Barry McElhln- ney from Sundre Eorest Products Ltd., and Ian Pengelly and Darrel Zell from Parks Canada for assistance. We thank the Ya Ha Tlnda ranch staff, pa rticu la rly ranch managers Johnny and Marie Nylund and Rick and Jean Smith for logistical support. We are also gratefu l to the Editor and an anonymous reviewer for the ir constructive comments on the manuscript.
References
Ahearn, S.C, Smith, J.L.D., Joshi, A.R., Ding, J., 2001. TIGMOD: an individual-basedspatia lly explic it model fo r s im ulating tiger/hum an interaction in m u ltip le useforests. Ecological M odelling 140, 81-97.
An, L., Linderman, M., Qi, J.G., Shortridge, A., Liu, J.G., 2005. Exploring com plexity in a hum an-environm ent system: an agent-based spatial model fo r m u ltid is c ip lina ry and multiscale integration. Annals o f the Association o f American Geographers 95 (1), 54-79.
Andersen, R., Linnell, J.D.C., Langvatn, R., 1996. Short te rm behavioural and physiological response o f moose Alces alces to m ilita ry disturbance in Norway. Biological Conservation 77,169-176.
Anderson, D.R., Burnham, K.P., 2002. Avoiding p itfa lls w hen using in fo rm ation the oretic methods. Journal o f W ild life Management 66,912-918.
Anwar, M., jeanneret, C., Parrott, L., Marceau, D.J., 2007. Conceptualization and im plem entation o f a m ulti-agent model to simulate w ha le-w atch ing activities in the St. Lawrence estuary in Quebec, Canada. Environm ental M odelling and Software 22 (12), 1775-1787.
Barrett, C, Eubank, S., Sm ith,]., 2005. Ifsm allpox strikes Portland. Scientific American 292 (3), 54-61.
Bartumeus, E., da Luz, M.G.E., V iswanathan, G.M., Catala, j., 2005. An im al search strategies: a quantita tive random -walk analysis. Ecology 86 (11), 3078- 3087.
Bennett, D.A., Tang, W., 2006. Modeling Yellowstone’s northern range e lk herd as adaptive, spatia lly aware, and mobile agents. In ternational jou rn a l o f Geographical In fo rm ation Science 20 (9), 1039-1066.
Bennett, V.J., Beard, M., Zollner, P.A., Eernandez-juricic, E., W estphal, L, LeBlanc, C.L, 2009. Understanding w ild life responses to human disturbance th rough sim ulatio n m odelling: a management too l. Ecological C om plexity 6 ,113-134.
Beyer, H.L., 2004. H aw th ’s analysis tools fo r ArcGlS. Available at h ttp :/ /w w w . spatialecology.com/htools/tooldesc.php.
Boitani, L., 1982. W o lf management in intensive ly used areas o f Italy. In: Harrington, E.H., Paquet, P. (Eds.), W olves o f the W orld : Perspectives o f Behavior, Ecology and Conservation. Noyes, Park Ridge, pp. 158-172.
Bousquet, E., Cambier, C., Morand, P., 1994. D istributed a rtific ia l intelligence and object-oriented m odelling o f a fishery. M athematical Com puter M odelling 2018, 97-107.
Bousquet, E., Le Page, C., 2004. M ulti-agent sim ulations and ecosystem management: a review. Ecological M odelling 176,313-332.
Boyce, M.S., 1995. Antic ipa ting consequences o f wolves in Yellowstone: Model va lidation. In: Carbyn, L.N., Eritts, S.H., Seip, R.R. (Eds.), Ecology and Conservation o f Wolves in a Changing W orld. Canadian C ircum polar Institute, U niversity o f A lberta, pp. 199-210.
Boyce, M.S., McDonald, LL., 1999. Relating populations to habitats using resource selection functions. Trends in Ecology and Evolution 14 (7), 268-272.
Boyd-Heger, D.K., 1997. Dispersal, genetic relationships, and landscape use by colonizing wolves in the central Rocky Mountains. Unpublished Ph.D. Thesis, U niversity o f Montana, Missoula, Mt., 184 pp.
Boyle, S.A., Samson, E.B., 1985. Effects o f nonconsumptive recreation on w ild life : a review. W ild life Society Bulle tin 13 (2), 110-116.
Burnham, K.P., Anderson, D.R., 2002. Model Selection and Inference: A Practical In form ation-Theoretic Approach. Springer-Verlag, NY, New York.
Callaghan, C.J., 2002. The ecology o f gray w o lf (Canis lupus) habitat use, survival, and persistence in the central Rocky Mountains. Unpublished Ph.D. thesis. Department o f Zoology, University o f Guelph, Guelph, Ontario, Canada.
Carroll, C., Noss, R.E., Paquet, P.C., 2001. Carnivores as focal species fo r conservatio n planning in the Rocky M ountain region. Ecological Applications 11, 961- 980.
Cassirer, E.E., Ereddy, D.J., Abies, E.D., 1992. Elk responses to disturbance by crosscountry skiers in Yellowstone National Park. W ild life Society Bulle tin 20,375-381.
Castilla, J.C., 1999. Coastal marine com m unities: trends and perspectives from hum an-exclusion experiments. TREE 14, 280-283.
Corsi, E., Dupre, E., Boitani, L., 1999. A large-scale model o f w o lf d is tribu tion in Italy fo r conservation planning. Conservation Biology 13 (1), 150-159.
Cramer, P.C., Portier, K.M., 2001. Modeling Elorida panther movements in response to human a ttributes o f the landscape and ecological settings. Ecological M odelling 140,51-80.
Doncaster, C.P., 1990. Non-param etric estimates o f interaction from radio-tracking data. Journal o fTheoretica l Biology 143,431-443.
Dumont, B., H ill, D., 2001. M ulti-agent s im ula tion o f group foraging in sheep: effects o fspatia l memory, conspecific a ttraction and p lo t size. Ecological M odelling 141, 201-215.
Ehrlich, P.R., Ehrlich, A.H., 1981. Extinction: The Causes and Consequences o f the Disappearance o f Species. Random House, New York, NY, USA.
ESRI, 2009. Spatial Analyst Extension o f ArcGlS Desktop 9.2. Environmental Systems Research Institu te (ESRI), http://webhelp.esri.eom /arcgisdesktop/9.2/ index.cfm.
Eorman, R.T.T., Alexander, LE., 1998. Roads and th e ir majorecological effects. Annual Review o f Ecology and Systematics 29 (1), 207-231.
Franke, A., Caelli, T., Kuzyka, G., Hudsona, R.J., 2006. Prediction o f w o lf (Cam's lupus) k ill-s ites using hidden M arkov models. Ecological M odelling 197, 237-246.
Ereddy, D.J., Bronaugh, W.M., Eowler, M.C., 1986. Responses o f m ule deer to disturbance by persons afoot and snowmobiles. W ild life Society Bulle tin 14 (1), 63-68.
Eritts, S.H., Mech, L.D., 1981. Dynamics, movements, and feeding ecology o f a new ly protected w o lf population in N orthwestern Minnesota. W ild life Monographs 80,1 -79 .
Eritts, S.H., Stephenson, R.O., Hayes, R.D., Boitani, L, 2003. W olves and humans. In: Mech, L.D., Boitani, L. (Eds.), Wolves: Behavior, Ecology and Conservation. U niversity o f Chicago Press, IL pp. 289-340.
M. Musiani et al. { Ecological M odelling221 (2010)2374-2387 2387
Garshelis, D.L, Glbeau, MX., Herrero, S., 2005. Grizzly bear demographics in and around Banff National Park and Kananaskis Country, Alberta. Journal o f W ild life Management 69, 277-297.
George, S.L., Crooks, K.R., 2006. Recreation and large mammal ac tiv ity in an urban nature reserve. Biological Conservation 133 (1), 107-117.
Grimm, V., Railsback, S.F., 2005. Individual-based M odelling and Ecology. Princeton University Press, Princeton, Nj, USA.
Haight, R.G., Miadenoff, D.J., Wydeven, A.P., 1998. M odeling d isjunct gray w o lf populations in sem i-w ild landscapes. Conservation Biology 12 (4), 879-888.
Harrington, F.H., Mech, LD., 1982. Patterns o f homesite attendance in tw o Minnesota w o lf packs. In: Harrington, F.H., Paquet, P.C. (Eds.), Wolves o f the W orld : Perspectives o f Behavior, Ecology, and Conservation. Noyes, Park Ridge, pp. 81-105.
Hebblewhite, M., Smith, D.W., 2010. W o lf com m un ity ecology: ecosystem effects o f recovering wolves in Banff and Yellowstone National Parks. In: Musiani, M., Boitani, L., Paquet, P. (Eds.), The W orld o fW olves: New Perspectives on Ecology, Behaviour and Management. U niversity o f Calgary Press, pp. 103-120.
Hebblewhite, M., W hite , C., N ietvelt, C., McKenzie, J., Hurd, I . , 2005a. Human ac tiv ity mediates a tro p h ic cascade caused by wolves. Ecology 86, 2135-2144.
Hebblewhite, M., M erril, E.H., McDonald, I.E., 2005b. Spatial decom position o f predation risk using resource selection functions: an example in a w o lf-e lk p reda to r-p rey system. Oikos 111, 101-111.
Hebblewhite, M., M errill, E.H., McDermid, G., 2008. A m ulti-scale test o f the forage m aturation hypothesis in a partia lly m igra tory ungulate population. Ecological Monographs 78,141-166.
Hebblewhite, M., Percy, M., M errill, E.H., 2007. Are a ll GPS collars created equal? Correcting habitat-induced bias using three brands in the Central Canadian Rockies. Journal o fW ild life Management 71, 2026-2033.
Holmes, I.E., Knight, R.L, Libby, S., Craig, G.R., 1993. Responses o fw in te rin g grassland raptors to human disturbance. W ild life Society Bulle tin 4, 461-468.
J^drzejewski, W., Schmidt, K., Theuerkauf, J., J^drzejewska, B., Okarma, H., 2001. Daily movements and te rr ito ry use by radio-collared wolves (Canis lupus) in Biatowieza Primeval Eorest in Poland. Canadian Journal o f Zoology 79 ,1 -12 .
Johnson, C.J., Nielsen, S.E., M errill, E.H., McDonald, I.E., Boyce, M.S., 2006. Resource selection functions based on use-ava ilab ility data: theoretica l m o tiva tion and evaluation methods. Journal o fW ild life Management 70,347-357.
Johnson, J.B., Omland, K.S., 2004. Model selection in ecology and evolution. Trends in Ecology and Evolution 19,101-108.
Karlsson, J., Eriksson, M., Liberg, O., 2007. A t w ha t distance do wolves move away from an approaching human? Canadian Journal o f Zoology 85,1193-1197.
Kasworm, W.E., Manley, T.L., 1990. Road and tra il influences on grizz ly bears and black bears in Northwest Montana. In: Bears: Their Biology and Management, vol. 8, pp. 79-84.
Keller, B.J., Bender, L.C., 2007. Bighorn sheep response to road-related disturbances in Rocky M ountain National Park, Colorado. Journal o fW ild life Management 71(7), 2329-2337.
Larsen, T., Ripple, W.J., 2006. Modeling gray w o lf (Canis lupus) habitat in the Pacific Northwest, USA. Journal o f Conservation Planning 2 (1), 30-61.
M acArthur, R.H., 1955. Fluctuations in anim al populations and a measure o f comm un ity stab ility . Ecology 36, 533-536.
M acArthur, R.A., Geist, V., Johnston, R.H., 1982. Cardiac and behavioral responses o f m ountain sheep to human disturbance. The Journal o fW ild life Management 46, 351-358.
Manly, B.F.J., McDonald, E.L, Thomas, D.E., McDonald, T.E., Erickson, W.P., 2002. Resource Selection by Anim als: Statistical Design fo r Field Studies. K luw er Academic Publishers.
Marceau, D.J., 2008. W hat can be learned from m ulti-agent systems? In: G im blett, R. (Ed.), M onitoring, S im ulation and Management o fV is ito r Landscapes. U niversity o f Arizona Press, pp. 411-424.
McDermid, G.J., Hall, R.J., Sanchez-Azofeifa, G.A., Franklin, S.E., Stenhouse, G.B., Kobliuk, T., LeDrew, E.F., 2009. Remote sensing and forest inventory fo r w ild life habitat assessment. Forest Ecology and Management 257 (11), 2262-2269.
McDonnell, M.J., Pickett, S.T.A., Pouyat, R.V., 1993. The application o f the ecological gradient paradigm to the study o f urban effects. In: McDonnell, M.J., Pickett, S.T.A. (Eds.), Humans as Components o f Ecosystems: Subtle Human Effects and the Ecology o f Populated Areas. Springer-Verlag, New York, pp. 175-189.
McLellan, B.N., Shackleton, D.M., 1988. Grizzly bears and resource-extraction industries: effects o f roads on behaviour, habitat use and demography. The Journal o f Applied Ecology 25, 451-460.
Mech, L.D., 1994. Regular and homeward travel speeds o f A rctic wolves. Journal o f Mammalogy 75, 741-742.
Mech, L.D., 1995. The challenge and oppo rtun ity o f recovering w o lf populations. Conservation Biology 9 (2), 270-278.
Mech, L.D., 1970. The W o lf: The Ecology and Behavior o f an Endangered Species. University o f M innesota Press, M inneapolis, Minnesota.
M iadenoff, D.J., Haight, R.G., Sickley, T.A., W ydeven, A.P., 1997. Causes and im plications o f species restoration in altered ecosystems: a spatial landscape projection o f w o lf population recovery. Bioscience 47, 21-31.
Miadenoff, D.J., Sickley, T.A., Haight, R.G., Wydeven, A.P., 1995. A regional landscape analysis and prediction o f favorable gray w o lf habitat in the northern Great Lakes region. Conservation Biology 9 (2), 279-294.
Musiani, M., Okarma, H.,Jedrzejewski, W., 1998. Speed and actual distance travelled by radiocollared wolves in Bialowieza Primeval Eorest (Poland). ActaTheriolog- ica 43, 409-416.
Musiani, M., Paquet, P.C., 2004. The practices o f w o lf persecution, protection and restoration in Canada and the USA. Bioscience 54 ,50-60 .
Nielson, R., Manly, B.E.J., Mcdonald, LL., 2004. A p re lim inary study o f the bias and variance w hen estim ating a resource selection function w ith separate samples o f used and available resource units. In: Huzurbazar, S. (Ed.), Resource Selection Methods and Applications. Proceedings o f the First In ternational Conference on Resource Selection, Laramie, W yom ing, January 13-15, 2003. W estern Ecosystems Technology Inc., pp. 28-34.
North, M.J., Collier, N.T., Vos, J.R., 2006. Experiences creating three im plem entations o f the Repast agent modeling to o lk it. ACM Transactions on Modeling and Com puter S im ulation 16 (1), 1-25.
Pacas, C., 1996. Human use o f the Banff Bow Valley: past, present and future. In: Green, J., Pacas, C., Bayley, S., Cornwell, L. (Eds.), A Cumulative Effects Assessment and Futures O utlook fo rth e Banff Bow Valley. Prepared fo rth e Banff Bow Valley Study. Department o f Canadian Heritage, Ottawa, Ontario, Chapter 3.
Paine, R.T., 1995. A conversation on refin ing the concept o f keystone species. Conservation Biology 9, 962-964.
Papouchis, CM., Singer, E.J., Sloan, W.B., 2001. Responses o f desert b ighorn sheep to increased human recreation. The Journal o fW ild life Management 65,573-582.
Paquet, P.C., W ierzchowski, J., Callaghan, C, 1996. Effects o f human ac tiv ity on gray wolves in the Bow River Valley, Banff National Park, Alberta. In: Green, J., Pacas, C., Bayley, S., Cornwell, L (Eds.), A Cumulative Effects Assessment and Futures O utlook fo r the Banff Bow Valley. Prepared fo r the Banff Bow Valley Study. Department o f Canadian Heritage, Ottawa, Ontario, Chapter 7.
Parks Canada, 2007. Park Management, Banff National Parks o f Canada. http://www.pc.gc.ca/pn-np/ab/banff/p lan/plan8b.E.asp#eco4.
Parry, H.R., Evans, A.J., Morgan, D., 2004. Aphid population dynamics in agricultural landscapes: an agent-based s im ulation model. In: Pahl-Wostl, C., Schmidt, S., Jakeman, T. (Eds.), iEMSs 2004 In ternational Congress: Com plexity and Integrated Resources Management. In ternational Environm ental M odelling and Software Society, Osnabrueck, Germany, June.
Percy, M., 2003. Temporal and spatial ac tiv ity patterns o f large carnivores in the Bow Valley o f Banff National Park. Unpublished M.Sc. Thesis, Department o f Biological Sciences, U niversity o f Alberta, Edmonton, Alberta.
Peterson, R.O., Page, R.E., 1988. The rise and fall o f Isle Royale wolves, 1975-1986. Journal o f Mammalogy 69, 89-99.
Post, E., Peterson, R.O., Stenseth, N.C., McLaren, B.E., 1999. Ecosystem consequences o f w o lf behavioural response to climate. Nature 401, 905-907.
Purves, H., Doering, C, 1999. W olves and people: assessing cum ulative impacts o f human disturbance on wolves in Jasper National Park. In: Proceedings o f the Nineteenth Annual ESRI User Conference, 1999, San Diego, California, July 26-30.
Schultz, R.D., Bailey, J.A., 1978. Responses o f national park elk to human activity. Journal o fW ild life Management 42 ,91-100.
Seaman, D.E., Powell, R.A., 1996. An evaluation o f the accuracy o f kernel density estimators fo r home range analysis. Ecology 77, 2075-2085.
Shepherd, B., W h itting ton , J., 2006. Response o f wolves to co rrido r restoration and human use management. Ecology and Society 11,1.
Soule, M.E., Estes, J., Berger, J., M artinez del Rio, C., 2003. Ecological effectiveness: conservation goals fo r interactive species. Conservation Biology 17 ,1238- 1250.
Stephens, P.A., Bus kirk, S.W., Hayward, G.D., Del Rio, C.M., 2005. In fo rm ation theory and hypothesis testing: a call fo r pluralism . Journal o f Applied Ecology 42 ,4 -12 .
Strickland, M.D., McDonald, L.L, 2006. In troduction to th e special section on resource selection. Journal o fW ild life Management 70,321-323.
Taylor, A.R., Knight, R.L, 2003. W ild life responsesto recreation and associated v is ito r perceptions. Ecological Applications 13 (4), 951-963.
Tew, T.E., Macdonald, D.W., 1994. Dynamics o f space use and male v igour amongst w ood mice, Apodemus sylvaticus, in the cereal ecosystem. Behavioral Ecology and Sociobiology 34, 337-345.
Topping, C.J., Hansen, T.S., Jensen, T.S., Jepsen, J.U., Nikolajsen, E., Odderskaer, P., 2003. ALMaSS, an agent-based model fo r animals in temperate European landscapes. Ecological M odelling 167, 65-82.
Trombulak, S.C., Frlssell, C.A., 2000. Review ofecological effects o f roads on terrestria l and aquatic com m unities. Conservation Biology 14 (1), 18-30.
Van Baiienberghe, V., Erickson, A.W., Byman, D., 1975. Ecology o f the T im ber W o lf in Northeastern M innesota. W ild life Monographs 4 3 ,1 -43 .
Vitousek, P.M., Mooney, H.A., 1997. Human dom ination o f Earth’s ecosystems. Science 277, 5325.
Webb, N.F., Hebblewhite, M., M errill, E.H., 2008. Statistical methods fo r identify ing w o lf k ill sites using global position ing systems. Journal o fW ild life Management72, 798-807.
W h itting ton , J., St. Clair, C.C., Mercer, G., 2005. Spatial responses o f wolves to roads and tra ils in m ountain valleys. Ecological Applications 15,543-553.
W h itting ton , J., St. Clair, C.C., Mercer, G., 2004. Path to rtu o s ity and the perm eability o f roads and tra ils to w o lf movement. Ecology and Society 9 (1), 4.
W isdom , M.J., Preisler, H.K., Cimon, B.K., Johnson, B.K., 2004. Effects o fo ff-road recrea tion on m ule deer and elk. In: Transactions o f the North Am erican W ild life and Natural Resource Conference, vol. 69.
Yost, A.C, W righ t, R.G., 2001. Moose, caribou, and grizz ly bear d is tribu tion in re lation to road tra ffic in Denali National Park, Alaska. A rctic 54 ,41-48 .
Young, P., Goldman, E.A., 1944. The Wolves o f North America. American W ild life Institu te , Washington, DC.
Zar,J.H., 1984. B iostatistical Analysis. Prentice-Hall.


















