
Home Page HSI’09 - Semantic Scholar · HSI’09 2nd International Conference on Human System...
24
HSI’09 2nd International Conference on Human System Interaction Catania, Italy, May 21-23, 2009 Proceedings Edited by Lucia Lo Bello and Giancarlo Iannizzotto IEEE Catalog Number: CFP0921D-USB ISBN: 978-1-4244-3960-7 Library of Congress: 2009900916 Technical inquiries regarding the USB proceedings can be sent to Prof. Orazio Mirabella Engineering Faculty, University of Catania. Tel: +39095 7382361 Fax: +39095 7382397 e-mail: [email protected] Message from General Co-Chairmen [ > ] Message from the Program Co-Chairs [ > ] Home Page Home page file:///G:/index.ht m 1 von 2 02.06.2009 11:55
Transcript of Home Page HSI’09 - Semantic Scholar · HSI’09 2nd International Conference on Human System...

HSI’092nd International Conference on
Human System Interaction
Catania, Italy, May 21-23, 2009
Proceedings
Edited by Lucia Lo Bello and Giancarlo Iannizzotto IEEE Catalog Number: CFP0921D-USBISBN: 978-1-4244-3960-7Library of Congress: 2009900916 Technical inquiries regarding the USB proceedings can be sent toProf. Orazio MirabellaEngineering Faculty, University of Catania.Tel: +39095 7382361Fax: +39095 7382397e-mail: [email protected]
Message from General Co-Chairmen [ >]
Message from the Program Co-Chairs [ >]
Home Page
Home page file:///G:/index.htm
1 von 2 02.06.2009 11:55

Home page file:///G:/index.htm
2 von 2 02.06.2009 11:55
HSI 2009 – Conference Program 1
CONFERENCE PROGRAM
Human System Interaction 2009
May 21 - 23 2009, Catania, Italy
Last update: May 19, 2009 Thursday, May 21, 2009 8.00 – 9.00 Registration 9.00 – 9.30 Opening Cerimony 9.30 – 10.30 Keynote Lecture Benedetto Vigna
10.30 – 11.00 Coffee break
11.00 – 13.00 Oral sessions Room 1 T1.1: Intelligence Chairs: Milos Manic, Sergiu-Dan Stan
Wojciech Froelich, Alicja Wakulicz-Deja Mining temporal medical data using adaptive fuzzy cognitive maps. Andrzej Pulka Decision Supporting System Based on Fuzzy Default Reasoning Anca Loredana Ion Algorithms for Reducing the Semantic Gap in Image Retrieval Systems Dan Verdes, Sergiu-Dan Stan, Milos Manic, Radu Balan, Vistrian Maties Kinematics analysis, Workspace, Design and Control of 3-RPS and TRIGLIDE medical parallel robots Kitti Suwanratchatamanee, Mitsuharu Matsumoto, Shuji Hashimoto Balance Control of Robot and Human-Robot Interaction with Haptic Sensing Foots Kurt Derr, Milos Manic Multi-Robot Multi-Target Particle Swarm Optimizatio n Search in Noisy Wireless Environments
HSI 2009 – Conference Program 2
Room 2 T4.1: Human Machine Interaction Chairs: Paolo Buono, Leonidas Deligiannidis
Leonidas Deligiannidis, Daniel McConnell, Christopher Vallee Visual and Proprioceptive Integration of the Virtual and Real Fingertips Christian Richter, Marcus Fischer, Franz Irlinger, Tim C. Lueth A Spatial Path Specification System for Mechanism Development Adam Csapo, Barna Resko, Hideki Hashimoto, Peter Baranyi Automated Pairing Between Physical Control Parameters and Coding Parameters in Auditory Cognitive Communication Channels Hiroaki Kuwahara, Tomoyuki Shimono, Kouhei Ohnishi Abstraction of Action Components Based on Haptic Information Michael Strolz, Claudia Ehinger, Martin Buss Design of a Device for the High-Fidelity Haptic Rendering of Rotatory Car Doors Jochen Ehnes A Tangible Interface for the AMI Content Linking De vice – The Automated Meeting Assistant
13.00 – 14.00 Lunch
14.00 – 16.00 Oral sessions Room 1 T1.2: Intelligence Chairs: Elizabeth Chang, Rado Balan
Mircea-Bogdan Radac, Radu-Emil Precup, Stefan Preitl, Emil M. Petriu, Jozsef K. Tar, Claudia-Adina Dragos Signal Processing Aspects in State Feedback Control Based on Iterative Feedback Tuning Cristian Szep, Sergiu-Dan Stan, Vencel Csibi, Milos Manic, Radu Balan Kinematics, Workspace, Design and Accuracy Analysis of RPRPR Medical Parallel Robot Ondrej Linda, Milos Manic Fuzzy manual control of multi-robot system with built-in swarm behavior Kevin McCarty, Milos Manic Adaptive Behavioral Control of Collaborative Robots in Hazardous Environments

HSI 2009 – Conference Program 3
Hao Yu, Bogdan Wilamowski Intelligent Human Interaction System Work-in-Progress Papers Zaiping Chen, Enzeng Dong Networked Control Systems Based on Dynamic Matrix Control Zaiping Chen, Chunxue Liu Networked Control System with Long Time Delay Based on Incremental Predictive Functional Control GuoQing Yin, Dietmar Bruckner Gaussian Models and Fast Learning Algorithm for Persistence Analysis of Tracked Video Objects
Room 2 T4.2: Human Machine Interaction Chairs: Christian Richter, Jerzy Grzymala-Busse
Jerzy W. Grzymala-Busse, Zdzislaw S. Hippe, Wojciech Rzasa, Supriya Vasudevan A Valued Tolerance Approach to Missing Attribute Values in Data Mining Richard Kennard, Ernest Edmonds, John Leaney Separation Anxiety - stresses of developing a modern day Separable User Interface Eriks Sneiders Automated FAQ Answering with Question-Specific Knowledge Representation for Web Self-Service Cristóvão Sousa, Rui Cortesão, Pedro Queirós Compliant Comanipulation Control for Medical Roboti cs Jürgen Gast, Alexander Bannat, Tobias Rehrl, Frank Wallhoff, Gerhard Rigoll, Cornelia Wendt, Sabrina Schmidt, Michael Popp, Berthold Färber Real-time Framework for Multimodal Human-Robot Inte ractions Carmelo Ardito, Paolo Buono, Maria F. Costabile, Rosa Lanzilotti, Adalberto L. Simeone Comparing low cost input devices for interacting with 3D Virtual Environments
Room 3 SS5: Accessing, Structuring, Analyzing and Adapting Information in Web 2.0 Chairs: Antonina Dattolo, Carlo Tasso
Vincenzo Loia, Carmen De Maio, Giuseppe Fenza, Sabrina Senatore Ontology-based knowledge structuring: an application on RSS Feeds

HSI 2009 – Conference Program 4
Antonio Rodà, Sergio Canazza Virtual performance, Actual gesture: A Web 2.0 system for expressive performance of music contents Roberto Pirrone, Vincenzo Cannella, Giuseppe Russo A Map-Based Visualization Tool To Support Tutors In E-Learning 2.0 Antonina Dattolo, Felice Ferrara, Carlo Tasso Modeling a publication sharing system 2.0 Max Chevalier, Gilles Hubert Query Assistant based on Experience Capitalization for Information Retrieval Systems
Work-in-Progress Papers Marta Accorroni, Carlo Alberto Bentivoglio Supporting Tutoring by Improved Statistical Analysis of Discussion Forum Leonidas Deligiannidis Exploring Large Readable and Interactive RDF Graphs Antonella Carbonaro Building a collaborative semantic-aware framework for search: the SWS2 project
16.00 – 16.30 Coffee break
16.30 – 17.30 Oral sessions Room 1 SS7.1: Human-System Interaction in Cultural Heritage Applications (HSICHA) Chair: Antonio Gentile
Mieke Haesen, Joan De Boeck, Karin Coninx, Chris Raymaekers An Interactive Coal Mine Museum Visit: Prototyping the User Experience
Salvatore Andolina, Antonella Santangelo, Mirco Cannella, Antonio Gentile, Fabrizio Agnello, Benedetto Villa Multimodal virtual navigation of a Cultural Heritag e site: the medieval ceiling of Steri in Palermo Donato Abruzzese, Michele Angelaccio, Romeo Giuliano, Lorenzo Miccoli, Alessandro Vari Monitoring and Vibration Risk Assessment in Cultural Heritage via Wireless Sensors Network

HSI 2009 – Conference Program 5
Room 2 Round table: State of art, open issues and future perspectives of Human System Interaction in Web 2.0. Chairs: Antonina Dattolo, Carlo Tasso Room 3 T4.3: Human Machine Interaction Chair: Paolo Buono
Work-in-Progress Papers Emanuele Principi, Simone Cifani, Cesare Rocchi, Stefano Squartini, Francesco Piazza Keyword spotting based system for conversation fostering in tabletop scenarios: preliminary evaluation Sho Yokota, Hiroshi Hashimoto, Yasuhiro Ohyama, Jin-Hua She, Hisato Kobayashi, Pierre Blazevic The Electric Wheelchair Controlled by Human Body Motion Carmen Brigante, Nunzio Abbate, Adriano Basile, Alessandro Faulisi Development of a MEMS based wearable motion capture system Patricio Nebot, Enric Cervera Experiences in HRI: Design of an Interface for a Team of Multiple Heterogeneous Robots
17.30 – 18.30 Poster sessions Main Hall T1: Intelligence Chairs: David Bruemmer, Anca Loredana Ion
Hiroshi Hashimoto, Sho Yokota, Akinori Sasaki, Yasuhiro Ohyama, Hiroyuki Kobayashi Cooperative Interaction of Walking Human and Distributed Robot Maintaining Stability of Swarm Julian Szymanski Web Search Results Clusterization with Background Knowledge Yoshihiro Tanaka, Kazuki Doumoto, Akihito Sano, Hideo Fujimoto Active Tactile Sensing of Stiffness and Surface Condition Using Balloon Expansion Masataka Sato, Tomoyuki Shimono, Hiroaki Kuwahara, Yusuke Kasahara, Kouhei Ohnishi Evaluation method of Haptic Human Motion by Modal Work Information Pawel Kaczmarek, Piotr Zielonka A Video Monitoring System Using Ontology-Driven Identification of Threats

HSI 2009 – Conference Program 6
Alessandra De Paola, Salvatore Gaglio, Giuseppe Lo Re, Marco Ortolani Human-Ambient Interaction through Wireless Sensor Networks
T4: Human Machine Interaction Chairs: Adalberto Simeone
Marco Porta, Alessia Ravelli WeyeB, an Eye-Controlled Web Browser for Hands-Free Navigation Marija Brkic, Maja Matetic, Igor Jugo Corpora Building and Processing Tomasz Kocejko, Adam Bujnowski, Jerzy Wtorek Complex Human Computer Interface for LAS Patient Daniela Angelucci, Stefania Di Paolo, Laura Tarantino Designing a glanceable peripheral display for severity-based multiple alarm notification Krzysztof Pancerz A New Version of ROSECON - a Software Tool for Modeling and Analyzing Systems of Processes Working Together Vimina E R An Automated Reverse Turing Test Using Facial Expressions
18.30 – 19.30 Welcome Reception

HSI 2009 – Conference Program 7
Friday, May 22, 2009 8.00 – 9.30 Registration 9.30 – 10.30 Keynote Lecture
Luca Chittaro
10.30 – 11.00 Coffee break
11.00 – 13.10 Oral sessions Room 1 T5: Human-centered Computing Systems Design Chair: Krzysztof Pancerz
Ester Boldrini, Sergio Ferrández, Rubén Izquierdo, David Tomás, ÓScar Ferrández, José Luís Vicedo A proposal of Expected Answer Type and Named Entity annotation in a Question Answering context Avgoustinos Filippoupolitis, Erol Gelenbe A Distributed Decision Support System for Building Evacuation Steven Verstockt, Davy Decoo, Daute Van Nieuwenhuyse, Filip De Pauw, Rik Van de Walle Assistive Smartphone for People with Special Needs : the Personal Social Assistant Carmelo Ardito, Maria F. Costabile, Rosa Lanzilotti, Antonio Piccinno A tool for Wizard of Oz studies of multimodal mobile systems Massimo Felici, Valentina Di Giacomo, Valentino Meduri, Domenico Presenza, Carlo Riccucci, Alessandra Tedeschi Validating Complex Interactions in Air Traffic Mana gement Francesco La Rosa, Giovanni Crisafulli, Giancarlo Iannizzotto Two competitive solutions to the problem of remote Eye-Tracking Poster Vassilis-Javed Khan, Panos Markopoulos, Berry Eggen An Experience Sampling Study into Awareness Needs of Busy Families

HSI 2009 – Conference Program 8
Room 3 SS4: HMI-IAHA (Human Machine Interaction in Industr y Automation and Home Automation) Chair: Salvatore Cavalieri
Pedro Ponsa, Ramon Vilanova, Beatriz Amante Towards Integral Human-Machine System conception: from automation design to usability concerns Pere Ponsa, Cristina Manresa-Yee, David Batlle, Javier Varona Assessment of the Use of a Human-computer vision Interaction Framework Tudoroiu Nicolae, Zaheeruddin Mohammed, Chiru Claudiu, Grigore Manuela, Tudoroiu Roxana-Elena Unscented Kalman Filter (UKF) and Frequency Analysis (FA) Techniques used for Fault Detection, Diagnosis and Isolation (FDDI) in Heating Ventilation Air Conditioning Systems (HVAC)-Comparison Results Filippo Bonaccorso, Carlo Bruno, Luciano Cantelli, Domenico Longo, Giovanni Muscato A Modular Software Interface for the Control System of an Arc Welding Robot Russ Agrusa, Valeria G. Mazza, Roberto Penso Advanced 3D Visualization for Manufacturing and Facility Controls Benbouchama Cherrad A Parameterizable Handel-C Neural Network Implementation for FPGA
11.00 – 12.10 Oral sessions Room 2 T2.1: Telemedicine and e-health Chairs: Marco Porta, Luciano Gamberini
Stefano Bonacina, Sara Marceglia, Luca Mazzola, Francesco Pinciroli Towards Home Healthcare Informatics Myriam Lipprandt, Marco Eichelberg, Wolfgang Thronicke, Jan Krüger, Isabel Drüke, Detlev Willemsen, Clemens Busch, Christoph Fiehe, Elmar Zeeb, Frank Golatowski, Andreas Hein OSAMI-D: A Domain-Specific Software Platform for Health Care Services Francesco Sgrò, Lucia Lo Bello, Mario Lipoma A networked embedded computing platform for physical activity assessment
Poster Sebastian Neubert, Dagmar Arndt, Silke Holzmüller-Laue, Regina Stoll Telemedical data acquisition system for use in preventive medicine
HSI 2009 – Conference Program 9
12.10 – 13.10 Oral sessions Room 2 SS12: Enabling Technology for Remote System Interaction Chair: Janusz Korniak
Janusz Korniak, Pawel Rozycki Reliable GMPLS Control Plane Janusz Kolbusz, Janusz Korniak, Stanislaw Paszczynski Traffic Generator Model for an n-node Network Tomasz Bartczak, Stanislaw Paszczynski, Janusz Korniak Traffic Reduction in Computer Networks by Agent Technology
13.10 – 14.30 Lunch
14.10 – 16.30 Oral sessions Room 1 T2.2: Telemedicine and e-health Chair: Frank Golatowski, Marco Porta
José Gutiérrez-Maldonado, Iván Alsina-Jurnet, Mar Rus-Calafell Influence of personality and individual abilities on the Sense of Presence experienced in virtual environments Silke Holzmüller-Laue, Bernd Göde, Kerstin Thurow Medical Research-Oriented Workflow Automation in Distributed Heterogeneous Environments of Data Acquisition Luciano Gamberini, Francesco Martino, Bruno Seraglia, Anna Spagnolli, Malena Fabregat, Francisco Ibanez, Mariano Alcaniz, Javier Montesa Andres Eldergames Project: an innovative Mixed Reality Table-top solution to preserves Cognitive Functions in Elderly People.
Work-in-Progress Papers Stuart Golodetz, Irina Voiculescu, Stephen Cameron Progress on a Decision-Support System for Abdominal CT Scans
HSI 2009 – Conference Program 10
Fabio Amarù, Paolo Arena, Alberta Latteri, Davide Lombardo, Paolo Mazzone, Guido Vagliasindi Towards a Wearable Device for Deep Brain Signals Monitoring Florian Klompmaker, Karsten Nebe, Clemens Busch, Detlev Willemsen Designing Context Aware User Interfaces for Online Exercise Training Supervision
Room 2 T3: Education and training Chairs: Ahmad Ibrahim, Ahmet Kuzu
Alcínia Z. Sampaio, Pedro G. Henriques, Carlos O. Cruz Interactive models used in Civil Engineering education based on Virtual Reality technology Bernd Meyer, Kim Marriott, Adrian Bickerstaffe, Lars Knipping Intelligent Diagramming in the Electronic Online Classroom Ahmet Kuzu, Serkan Erboral, Seta Bogosyan, Metin Gokasan Multipurpose Wireless Sensor Network Platform for Research and Training in Data Fusion, and Multi-feature Target Tracking Miroslav Minović, Miloš Milovanović, Mlañan Jovanović, Dušan Starčević Model Driven Development of User Interfaces for Educational Games Andrés A. Nogueiras Meléndez, Alfonso Lago Ferreiro, Alexia Montero Nuñez, Alfonso Otero Alonso, Jorge Marcos Acevedo Improved Interface for a Power Electronics Remote Test Learning System
14.10 – 15.50 Oral sessions Room 3 SS1: Modeling the Human Mind Chairs: Gerhard Zucker, Dietmar Bruckner
Wolfgang Hilberg Generalizing the mirror-neuron-model for thinking p rocesses Gerald Wiest, Elisabeth Brainin The amused brain: Neuropsychoanalytic perspectives on laughter, humor and mirth Moreno I. Coco The statistical challenge of scan-path analysis

HSI 2009 – Conference Program 11
Tobias Deutsch, Anna Tmej, Clemens Muchitsch, Gerhard Zucker, Christiane Riedinger, Roland Lang Failsafe Aspects of a Decision Unit Inspired by Cognitive Sciences - The Id without Ego and Super-Ego Heimo Zeilinger, Roland Lang, Brit Müller Bionic Inspired Information Representation for Autonomous Agents
15.50 – 16.30 Oral sessions SS 7.1: Human-System Interaction in Cultural Heritage Applicazions (HSICHA) Chair: Antonio Gentile
Emanuele Borini, Rossana Damiano, Vincenzo Lombardo, Antonio Pizzo DramaSearch. Character-mediated search in Cultural Heritage Giuseppe Anastasi, Giuseppe Lo Re, Marco Ortolani WSNs for Structural Health Monitoring of Historical Buildings
16.30 – 17.00 Coffee break
17.00 – 20.00 Guided walking tour 20.00 – 23.00 Gala Dinner At the end of the dinner, Professor Kouhei Ohnishi will take a speech on Haptic Agent Robot
HSI 2009 – Conference Program 12
Saturday , May 23, 2009 8.00 – 9.00 Registration
9.00 – 10.50 Oral sessions Room 1 SS6: Positive Technology Chairs: Andrea Gaggioli; Giuseppe Riva
Caterina Calefato, Fabiana Vernero, Roberto Montanari Wikipedia as an Example of Positive Technology: how to promote Knowledge Sharing and Collaboration with a Persuasive Tutorial Rosa María Baños, Gemma García-Soriano, Cristina Botella, Elia Oliver, Ernestina Etchemendy, Juana María Bretón Positive mood induction and well being Hsiu-Chia Ko, Tsun-Ken Chen Chen Understanding the Continuous Self-Disclosure of Bloggers from the Cost-Benefit Perspective Timo Saari Modeling Positive Experiences in Human-Computer Interaction Timo Saari Emotionally Adapted Games as a Source for Positive Experiences Work-in-Progress Papers John Waterworth, Soledad Ballesteros, Christian Peter User-sensitive Home-based Systems for Successful Ageing
Room 2 SS11: Human factors for Human-System Interaction Chair: Hideyuki Sawada
Elena Zaitseva, Seppo Puuronen Multi-State System in Human Reliability Analysis S.M.Mizanoor Rahman, Ryojun Ikeura, Masaya Nobe, Hideki Sawai Design of a Power Assist System for Lifting Objects Based on Human's Weight Perception and Changes in System's Time Constant Chao-Lin Wu, Li-Chen Fu Analysis and Evaluation of System Integration Models for Human-System Interaction in UbiComp Environments

HSI 2009 – Conference Program 13
Shahriman Abu Bakar, Ryojun Ikeura, Ahmad Faizal Salleh, Takemi Yano, Kazuki Mizutani, Hideki Sawai A Study of Human Sense Effects and Characteristic during Human-Human Cooperative Task Keishi Fukuyama, Naoki Takahashi, Feng Zhao, Hideyuki Sawada Tactile Display Using the Vibration of SMA Wires and the Evaluation of Perceived Sensations
Room 3 SS10: Control System Resilience, Interdependencies and Human Interactions Chair: David Gertman
Craig Rieger, David Gertman, Miles McQueen Resilient Control Systems: Next Generation Design Research Stuart Walsh, Shane Cherry, Lyle Roybal Critical Infrastructure Modeling: An Approach to Ch aracterizing Interdependencies of Complex Networks & Control Systems Corrie I. Nichol, Milos Manic Video Game Device Haptic Interface for Robotic Arc Welding Todd Vollmer, Milos Manic Human Interface for Cyber Security Anomaly Detection Systems Work-in-Progress Papers Miles A. McQueen, Wayne F. Boyer Deception used for Cyber Defense of Control Systems David Gertman Human Factors and Data Fusion as Part of Control Systems Resilience
10.50 – 11.20 Coffee break
11.20 – 13.10 Oral sessions Room 1 SS3: Cognitive Communication in Inteligent Space Environment Chairs: Peter Korondi; Bjorn Solvang
Mihoko Niitsuma, Kazuki Yokoi, Hideki Hashimoto Describing Human-Object Interaction in Intelligent Space

HSI 2009 – Conference Program 14
Takeshi Sasaki, Hideki Hashimoto Design and Implementation of Distributed Sensor Network for Intelligent Space Based on Robot Technology Components Gabor Sziebig, Bjorn Solvang, Csaba Kiss, Peter Korondi Vibro-tactile feedback for VR systems Adam Csapo, Barna Resko, Hideki Hashimoto, Peter Baranyi Automated Pairing Between Physical Control Parameters and Coding Parameters in Auditory Cognitive Communication Channels Gábor Sörös, Barna Reskó, Péter Baranyi Cognitive Supervision System for Industrial Robots Laszlo A. Jeni, Zoltan Istenes, Mate Tejfel, Peter Korondi, Hideki Hashimoto Adaptive, Safe Mobile Robot Programming in the Intelligent Space
Room 2 SS11: Human factors for Human-System Interaction Chair: Hideyuki Sawada
Seiji Hata, Yohei Matsuda, Ken'ichi Unoki, Jun'ichiro Hayashi Human Sensitivity Simulator for visual Inspection of "Mura" Takuma Funahashi, Takayuki Fujiwara, Hiroyasu Koshimizu Vision-based Modeling of Human Behavior in Production Process Ryo Saegusa, Giorgio Metta, Giulio Sandini Active learning for sensorimotor coordination of autonomous robots Nina Abramova, Svetlana Kovriga, Dmitry Makarenko One Approach to Analysis of Risks due to Human Factors in Decision Support Systems for Ill-Structured Situations Lorenzo Masia, Valentina Squeri, Maura Casadio, Pietro Morasso, Vittorio Sanguineti, Giulio Sandini Visuo-motor tracking with coordinated wrist movements under different combinations of visual and kinesthetic disturbances
Room 3 SS8: Human System Interactions in transportation Chair: Roberto Montanari
Arcangelo Messina, Cesario Schiraldi, Andrew Sheldon Influence of vibrations on mental human performance for driving safety in heavy vehicles

HSI 2009 – Conference Program 15
Caterina Calefato, Daniela Cardillo, Fabio Tango Vehicle Towards Vehicle: Current Status and beyond on Research about Adaptive and Cooperative Vehicles and their Smart Behaviors Fabio Tango, Caterina Calefato, Luca Minin, Luca Canovi Moving attention from the road: a new methodology for the driver distraction evaluation using machine learning approaches Marco Pieve, Luisa Andreone, Filippo Visintainer, Andrea Spadoni Mitigation Accident Risk in Powered Two Wheelers domain: Improving effectiveness of Human Machine Interface Collision Avoidance System in Two Wheelers Gianfranco Burzio, Giacomo Mussino, Roberto Tadei, Guido Perboli, Mauro Dell'Amico, Leandro Guidotti A Subjective Field Test On Lane Departure Warning Function In The Framework Of The Eurofot Project
Work-in-Progress Papers Evangelos Bekiaris, Andrea Spadoni, Stella Nikolaou SAFERIDER Project: new safety and comfort in Powered Two Wheelers
13.10 – 13.30 Closing the conference 13.30 Lunch and farewell drink

.
978-1-4244-3960-7/09/ $25.00 2009 IEEE 383
HSI 2009 Catania, Italy, May 21-23, 2009
Abstract — In AI, different bionic inspired theories on
memory have gained ground. On the one hand neuronal networks are often used to realize learning systems. On the other hand psychology influences engineers by introducing the models of implicit and explicit memory. While neurology leaves out the question how mental functions emerge out of the brain structure, psychology classifies information but does not make a statement on its structure. This article presents a psychoanalytic inspired approach on information representation introduced within the ARS project. A short overview on the ARS model is given and the psychoanalytic theory behind information representation is presented. The developed technical concept is introduced and a use case for testing the model is defined.
Keywords — Autonomous Agent, Psychoanalysis, Information Representation, Bionic, Memory
I. INTRODUCTION
HE ARS (Artificial Recognition System) project, which was founded at the Vienna University of
Technology in 2003, deals with the modeling of human mind functionalities. It has the aim to introduce a new chapter in Artificial Intelligence (AI) [1, pp. 12 - 17]. The roots of the project are located in the area of building automation. Its goal is to design a system which manages and processes received sensor data in a fast and adequate way. Ongoing work focuses on the development of a control unit for embodied autonomous agents. Their functionalities are tested in a game of artificial life – called the Bubble World (BW) – which is shown in Section IV. This way enables the testing of functionality in a flexible and inexpensive way. The aim of ARS is not only to process incoming sensor data within real time, but also to react on unknown situations. Beneath building automation, smart avatars for e-learning applications or computer game intelligence represent areas with similar demands. In contrast to problems like playing chess these issues cannot be solved with complex mathematical algorithms only – an approach, AI has followed for a long time. A system which is able to fulfill these requirements, like no other, is represented by the human being. The human mind may represent the best known biologic control system – even
H. Zeilinger, R. Lang, B. Müller are with the Institute of Computer Technology of the Vienna University of Technology: phone +43 1 58801 38446, fax +43 1 58801 38499; (e-mail: [email protected])
the most complex one. Regarding the status quo in science, two attributes are preconditions for enabling mammals to act in an intelligent way – embodiment [2] and emotional intelligence [3]. While the former one has already entered the world of AI, [4], [5] the modeling as well as implementation of “emotions” are quite at the beginning [6], [7]. In order to design a model of the human mind a close cooperation between engineers and representatives of human sciences is required. The ARS project is divided to two areas. One is dealing with the perception of sensor data and the fusion of this data to semantic symbols. The second one is dealing with the reasoning unit which processes these semantic symbols. While the perception bases on neurological as well as neuropsychoanalytic theories the reasoning unit bases on a rather new AI approach – psychoanalysis. Unlike projects as the Blue Brain Project [8], the chosen path is not to reconstruct the brain structure in order to model and proof neurologic theories but to model human mind functionalities. The mapping between the brain structure and the structure of the mind is still an undiscovered area of research. Hence, a functional model, covering a wide range of human mind functions is used. Sigmund Freud’s second topographical model provides this functional description [9]. In addition it merges above mentioned requirements for intelligent behavior – embodiment and emotions – in one theory. A detailed discussion of the modeling process is given in [10]. The article deals with the psychoanalytic inspired information representation of external sensor data – sensor data which the agent receives from the environment – and internal sensor data – sensor data which represents the internal system state –, and “experienced” information. As all processes, which are run by the reasoning unit, require information, the information structure is elementary for further work. Section II presents current state of the art in the area of memory models and their technical implementation. An introduction on psychoanalytic theory behind the presented information representation is given in Section III. Psychoanalytic definitions are discussed and translated to technical terms. Section IV introduces the test environment for the reasoning unit. A use case which bases on the proposed information representation system is discussed. It has to be kept in mind that this article focuses on the modeling of an information representation structure. As this includes the translation of psychoanalytic definitions to technical terms this task has to be strictly decoupled
Bionic Inspired Information Representation for Autonomous Agents
H. Zeilinger †, R. Lang †, Member, IEEE, and B. Müller † † Vienna University of Technology, Institute of Computer Technology
T
.
384
from the implementation, which will be discussed in future work.
II. PRELIMINARY WORK
A well known approach for a bionic inspired memory model for autonomous agents represents the psychological and neurological theories. There exist numerous sub-categories of memory which are listed within this theory. Hence, the different implementations focus on a particular memory module only, which may result in bad influence on the model consistency to the basic theory. Implementations of episodic memory and semantic memory are the most common one. They base on the theories of E. Tulving [11] and A. Baddeley [12]. Approaches taking the episodic memory as archetype can be found in Tecuchi [13], or Ho [14]. J. Laird’s, A. Newell’s and Paul Rosenbloom’s SOAR architecture, which is introduced in [15], is designed to implement procedural and declarative memory, besides episodic one. The model of memory as a “storehouse”, which perfectly fits to engineering implementations which use databases, is denounced in [5]. R. Brooks [4], R. Pfeifer and J. Bongard are representatives of the idea that embodiment allowing interaction with the world is a requirement for designing smart systems. Pfeifer introduces the “complete agent perspective” by declaring that memory is the result of sensory stimulation and correlations between these sensors. In [16], Bovet et al. show an autonomous agent - AMOUSE - which connected neurons because of correlations between sensor signals. They show the emerging of a behavior out of these connections and interpret them as the robot’s memory. This method was refined in [17]. We go conform to the idea that memory is highly dependent on interaction with the outer world, but, however, also on stimuli from the inside. In contrast to [16] the proposed ARS model factors an internal “system demand” in its concept. As it is hard to define memory – memory emerges and cannot be defined in single functionalities – this article deals with the representation of information. A common theory, which is also supported by the psychoanalytic idea of memories, states that sensor data is processed in terms of symbols. In [18], the interconnection between neurons and semantic symbols is depicted, by the use of a new technical element – the so-called neuro-symbol. In 2008, a memory module, which bases on the episodic approach [19], was implemented to the pre-version of the actual ARS model. Due to the reasons which are mentioned above, a new approach for the specification of the information structure is used. As explained in [10] a new paradigm within the ARS project is the use of psychoanalytic theory for modeling the proposed reasoning unit. Psychoanalysis introduces a different approach to the modeling of an information structure. This article focuses on the engineering model of this theory, which has been introduced to the ARS project in [20] the first time. However, the topic of memory and information retrieving represents the border between psychoanalysis and other sciences like psychology or
neurology. Hence, an interconnection between these sciences has to be found. Neuropsychoanalysis defines this task as an aim. It discusses the perception of sensor data and the remembering of experiences. This theory was already modeled in [19], and ongoing work focuses on combining this model with the current ARS model – given that, it fits to psychoanalytic theory.
III. MODELLING OF MEMORIES
The psychoanalytic model of information representation forms the base for the modeling process.
A. Definitions
This subsection covers psychoanalytic terms, which are necessary for an understanding of the sections below.
1) Drive “[...]the psychical representative of the stimuli originating within the organism and reaching the mind, as a measure of the demand made upon the mind for work in consequence of its connection with the body”. [21] Translated to engineering terms, this definition says that the drive is a theoretical construct. It is represented by raw internal sensor data on the one hand and information, which the control unit is able to process, on the other. The psychic representation of a drive is composed by symbols, which are called affects, and according thing-presentations – see Subsection C.
2) Drive Source The drive source is the organ which signals the so called bodily need. Bodily stimuli are sent to the brain and initialize a demand. [10, pp. 57-58]
3) Drive Object The initialized demand needs to get discharged by the use of the so called drive object. [10, pp. 57] Hence, the drive object is an object used to reduce the intensity of sensor stimuli. A typical “bodily need” in engineering terms is a low energy level of an agent. In this case a recharging station represents the drive object.
B. ARS Model
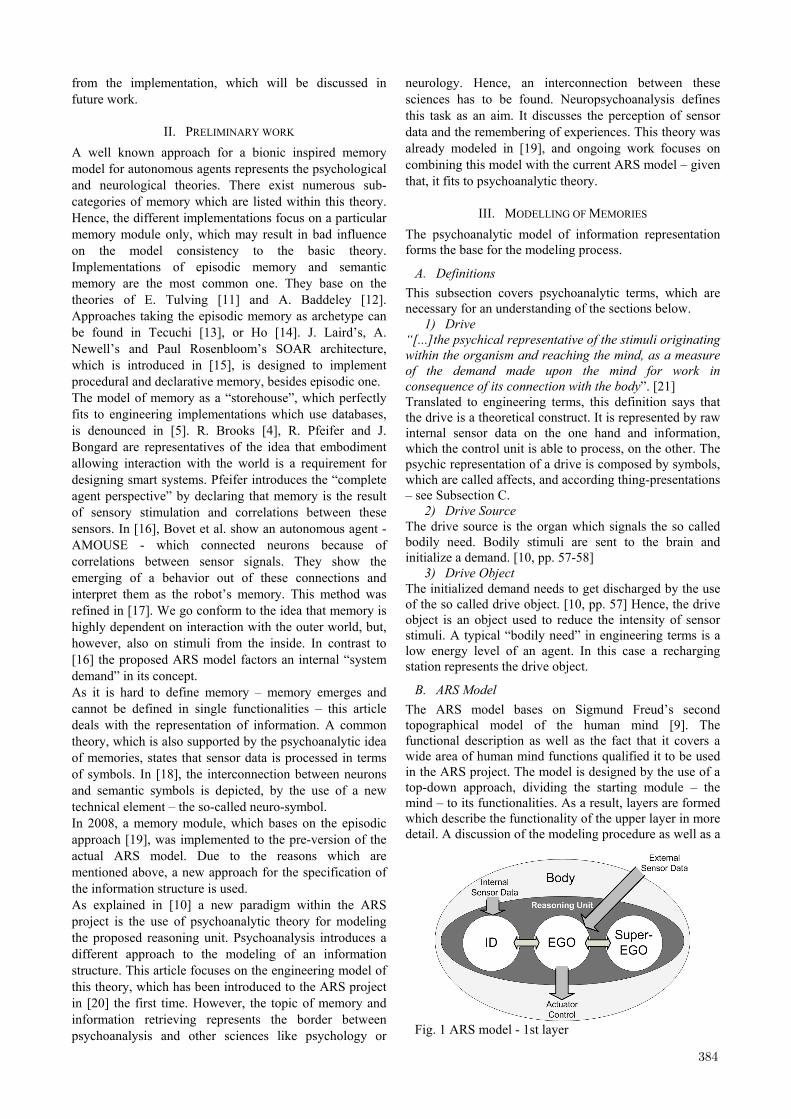
The ARS model bases on Sigmund Freud’s second topographical model of the human mind [9]. The functional description as well as the fact that it covers a wide area of human mind functions qualified it to be used in the ARS project. The model is designed by the use of a top-down approach, dividing the starting module – the mind – to its functionalities. As a result, layers are formed which describe the functionality of the upper layer in more detail. A discussion of the modeling procedure as well as a
Fig. 1 ARS model - 1st layer

.
385
detailed description of the different layers can be referred in [10], [22]. A detailed description of interfaces between the functional blocks is given in [23]. Fig. 1 shows the first layer of the model. The mind is divided in three instances which are named ID, EGO, and SUPER-EGO. These three modules form a control loop, influenced by external sensor data, internal sensor data, as well as already experienced and stored information.
1) ID The ID module receives internal sensor data which represents the system state. It evaluates and processes it to the “psychic” representation of the drive. Afterwards, the obtained information is passed on to the EGO where it influences the decision making process. The priority of the information, which is defined by the associated affect – see Subsection C – has to reach a certain limit, in order to get processed by the EGO module.
2) SUPER-EGO The SUPER-EGO module represents a database of bans and commandments. These databases are predefined by the developer, regarding safety critical situations – defined bans – and scenarios representing the action handling for predefined situations. As shown in Fig. 1 the SUPER-EGO receives information on the system’s environment from the EGO. Information from the ID is not included. Based on its database, the SUPER-EGO retrieves an operation for handling the current situation and replies it to the EGO.
3) EGO Finally the EGO calculates a “decision” for further action handling in respect to environmental data and to the demands of the two co-modules – the ID and the SUPER-EGO. The result is sent to the actuator control which manages the system’s actuators. All information transferred between ID, EGO, and SUPER-EGO bases on the information representation structure, which is explained below. Internal and external sensor data is represented as raw sensor data first, and arrives at the reasoning unit converted into symbols, by the use of a structure of neuro-symbols [18] – see Subsection C. The information flow between the reasoning unit and the agent body occurs in the form of commands which are interpretable by the actuator control. The according conversion takes place within the reason unit’s actuator interface – see [10].
C. Memory-symbols
Section I mentions a distinction of the ARS project in two main parts – the perception system and the reasoning unit. Both take the human being as an archetype, whether they differ in the theories they base on. While psychoanalysis was chosen as theory for modeling a reasoning unit, neuroscientific and neuropsychologic research findings were used for developing a model on humanlike perception [18]. This model propagates a hierarchical perception process. At the lowest – pre-wired – layer, raw sensor data is fused to symbols of one sensory type – tactile, audio, olfactory, visual, and taste. These symbols are called neurosymbols and are merged with neurosymbols, which contain other types of sensor data, in upper layers – see Fig. 2. Like it is shown in Fig. 2 the resulting symbols – called multimodal symbols in [18] –
are forwarded to the reasoning unit. These symbols can represent objects combining all types of sensor data, but also symbols of one type only like e. g. shape, color or size in case of visual information. Actual the model in [18] discusses the perception process of external sensor data. A theory on the perception of internal sensor data by regarding emotional evaluation of perceptual images is drafted, but will remain for further work. This article deals with the representation and processing of these symbols within the reasoning unit. Psychoanalytic theory does not distinct information depending on its kind of type – like semantic or episodic. It defines three basic modules which describe the information structure itself. These three modules are named affect, thing-presentation and word-presentation. Without exception, the information flow between the modules ID, EGO, and SUPER-EGO consist out of them.
1) Thing-presentation “… corresponds to sensorial characteristics of an object and is mainly processed in the ID.” [10, pp. 426] Sensorial characteristics are grouped to visual, taste, audio, olfactory, and tactile information. E. g. visual information corresponds to object attributes like color, shape, or size. In general a combination of these and other types of sensory information represents a thing-presentation. However any of these attributes can represent one thing-presentation on their own. In addition, scenarios of innate or early learned motion sequences, like go, eat, or carry, are thing-presentations too, even more complex one. Regarding to psychoanalysis they can be observed as a whole but cannot be segmented to their symbolic components [24].
2) Word-presentation … refers to the description of an object by the use of a set of symbols, like e. g. verbal expression in case of humans [25]. Hand gestures or combinations of sounds can be word-presentations too. A word-presentation merges the concept of an object – a conglomerate of associated thing-presentations and affects – to one term. However the “meaning” of an object remains in the underlying concept and cannot be found in the word-presentation. They are processed in the EGO only and form the basis for thinking and communication. On the other hand, every process in the EGO deals only with information that is associated to a word-presentation.
Fig. 2 Raw sensor data to semantic symbols

.
386
3) Affect “… is the qualitative form of drive energy in all its variations.” [10, pp. 416] There exist a number of psychoanalytic affect theories. Due to discussions, the proposed model defines the term affect as the drive-demand’s intensity. This definition is geared to [25]. It is assigned to a thing-presentation which represents the “type” of the affect. Without an associated thing-presentation the affect will lack on its meaning and hence, on its influence for further processing. An emotion is a special type of affect as it is always connected with a word-presentation. According to psychoanalytic theory word-presentations are processed by the EGO only. In case of deletion of the association, the emotion becomes an affect and is returned to the ID. Like emotions, feelings are affects connected with a word-presentation. However, the word-presentation is activated. Activation can be understood in terms of increasing the priority of a thing-presentation for the further process. This is a condition not applied to an emotion and influences the state of consciousness. According to psychoanalysis, pleasure and un-pleasure are the first, innate affects. They form the base for additional affects like happiness [26], sorrow, anger, surprise, interest, and disgust [27], and emotions, and feelings. In general thing-presentations, which represent the drive object, are associated to the affect too. This model results in a rather simple model of information representation – compared to numerous different memory types in psychological and neurologic theory. Hence it leaves some open questions which have to be answered for the technical implementation. Below, the three basic modules are summarized in the term “memory-symbol”.
D. Memory Traces
As defined in [10, pp. 424] a memory trace describes a “… psycho-physiological concept of the modality of representing memories in the mind. […] They are preserved permanently until they are reactivated, once they have been assigned”. Affects, thing-presentations, and word-presentations represent memory traces on their own, but can also be combined to a new one. As the psychoanalytic concept of a memory trace describes every memory itself, it represents a quiet generic definition for the use in
engineering terms. Hence the term memory-cloud is defined. Thing-presentations and affects can be associated to each other in case of concurrent appearance. These associations are weighted depending on the number of concurrent appearances. If these connections exceed a certain level of weight, the connected memory-symbols form a memory-cloud. A memory-cloud can be associated with a word-presentation but can also stay without one. It represents the network of memory-symbols which ground the word-presentation to the environment. Fig. 3 shows this process. An affect and its associated thing-presentation – this combination is named as A – is associated with the thing-presentation B. The memory-symbols which form a memory-cloud are associated with the word-presentation C. The links between the memory-symbols are labeled with their weight. The memory-symbols of one memory-cloud can be connected to external memory-symbols – less weight – and intersect with different memory-clouds. Hence, it is possible that the activation of a memory-symbol results in an activation of additional memory-symbols or complete memory-clouds. Two groups of activations are differentiated for the proposed information representation model.
E. Activation of Memory-Symbols
If the reasoning unit receives a symbol, it will be compared to already existing memory-symbols. Regarding the ARS model, template images [28], which represent a collection of symbolized sensor data describing certain situations, are predefined in certain memory-clouds [19]. The perceived symbols form an image of the current situation and are compared to these memory-clouds. If these images do not match a predefined image within a specified probability it is stored as new template image. The activation process is explained on the base of symbol activation. Memory-clouds are activated by exceeding a specific percentage of activated memory-symbols which are included. If a memory-cloud is activated, it is passed on to further processing. Two groups of activation are specified.
1) Direct and Indirect Activation A memory-symbol is directly activated if it matches with an incoming symbol. Only thing-presentations and affects can be directly activated as they are received from the internal and external sensory system. The affect triggers an activation level which influences the indirect activation of memory-symbols. If a word-presentation is activated, all memory-symbols within the associated memory-clouds are activated too. If two memory-symbols are directly activated at the same time the weight of their connection increases. The weight between two memory-symbols is modeled by exponential decreasing to time [19]. Freud first expected the connections between memory-symbols remain unmodified. Today the plasticity of memory-clouds is common knowledge and can be integrated in Freud’s theory – also because psychoanalysis rethought this theory of static memories too. Associations can be deleted, unlike memory-symbols, which remain in the memory. A memory-symbol is indirectly activated if it is activated by a direct activated memory-symbol. In contrast to direct activation, indirect activation does not result in a weight
Fig. 3 Configuration of a memory-cloud

.
387
increase of an association between memory-symbols. This process is explained in the following example. As shown in Fig. 3 the sum of the reciprocal values of the connection weights between memory-symbol A and B, and B and D, result in a value of 0.45. If the intensity of the directly activated affect exceeds 0.45 not only B but also thing-presentation D will be activated – otherwise D remains in the system memory. The affect quantifier is appointed by the intensity of the drive source. The memory-symbol at the end of a high weighted connection does not need the same amount of affect quantifier as a low weighted connection.
2) Internal and External Activation Internal activation means the activation of memory-symbols by a drive, which is represented by an affect and a thing-presentation. The connection between both is non-weighted – see Fig. 3. This means that both memory- symbols are activated in parallel. An affect indirectly activates other symbols in dependence to its intensity and its connection weights. If the drive demand gets influenced – the affect changes – by an object, the internal representation of the object gets associated to the affect. If the influence is a positive one, the object represents a drive object and is associated to the affect. If there does not exist a drive object, the object will be associated directly as primary drive-object. The term primary drive-object is a used notation for modeling only and not a psychoanalytical term. For example, the mother’s milk would be the first drive-object which reduces the hunger stimuli. On and on, objects get to be known which have similar consequences to the drive and therefore will be associated to the primary drive-object. A memory-symbol is externally activated by external sensor signals. Thing-presentations are activated directly while affects and word-presentations can only experience an indirect external activation.
F. Scenarios and Temporal Dependence
Future work deals with the integration of the introduced information representation system to scenario recognition. An approach is shown in [19], even on the base of episodic memory. A short outlook is given here. A sequence of memory-clouds, which are discussed above, form a scenario, which support the system in its action handling – e. g. it should be possible to admit already “experienced” failures or to repeat successful operations. In Section IV and V an example on a path finding scenario is given. Temporal dependence between the different images is defined by word-presentations. An adequate algorithm for comparing incoming images with predefined memory-clouds – also known as template images – is introduced in [29]. Section IV introduces the test environment, where the concept of memory-symbols should be implemented to.
IV. TEST ENVIRONMENT
To stimulate the implementation of the proposed concept for information representation of perceived data, a virtual test environment has been designed. In the history of AI, several models of the mind have been embedded into an artificial life simulation environment for test purpose. One
of the first thought experiments was the ‘Fungus Eater’-scenario depicted in [30] and one of the most recent implementation the Psi-Theory described in [31]. The main goal of the created simulation environment was
to place the proposed model into a simulated, embodied, robot-like agent that is able to interact with a simplified 2-dimensional environment as it is shown in Fig. 4. The simulation is based on the fast discrete-event multi-agent simulation library MASON [32], a Java-project developed by the Georg Mason University. It provides a 2D framework for handling and scheduling multi-agents within an environment. In addition it supports collision handling with an implemented, efficient and lightweight 2D physics engine. Within the actual simplified environment, which bases on a demo-project in MASON, several static and movable objects are situated. Obstacles, visualized as stones in Fig. 4, are static and can be used as landmarks for the agents. Energy sources – represented by small circles – are moveable and have to be collected to recharge the agent’s energy level. They can be consumed on demand. The big circle represents a simple animal agent that can be hunted by a team of agents and then serves as an energy source too. There are two types of intelligent agents in the environment that have the goal to survive as long as possible: artificial and human controlled agents. In Fig.4 there are two artificial controlled agents that are competing against one human controlled agent. The artificial agents are using the proposed model implemented in their decision unit to perceive the environment through visual, tactile and odometric sensors. Taste, olfactoric and audio sensors are proposed but have not been implemented yet. The agents are able to interact with their environment with their gripper arms – to hold and release objects – and their mouth – for consuming energy resources. For movement, the agent has the same degrees of freedom as a two-wheeled robot – it can move forward and backward and rotate in both directions. The human controlled agent allows a human operator to interact with the virtual environment too. Using the keyboard, the agent can be navigated manually through the scene, disturbing or cooperating with the autonomously acting, artificial agents.
Fig. 4 Test environment

.
388
As mentioned above, stones with different shapes are randomly placed into the environment. They are the main test-component for the use-case, defined to test the proposed model of information representation. Initially, the agent does not have any information about the environment. It is only able to perceive objects that are in the scope of the visual sensor. Using different patterns of exploring the environment, the agent suddenly perceives the first object in form of a sensory image that is assigned to a memory-cloud. With the corresponding thing-presentations including color, shape, size and the occurring affects like happiness or interest, the perceived data is stored and linked together. In a further step, this data structure is – after satisfying several restrictions of the implementation of a SUPER-EGO - assigned to a word presentation. In a first attempt, the word-presentations are already predefined and if a combination of perceived thing-presentations and affects are matching with a predefined template, the corresponding word-presentation is set. As an example, if the agent perceives thing-presentations that are representing a round, gray, solid object of medium size, a connection is made to the word-presentation “Stone A”. By doing so, the agent is able to memorize new discovered objects in the environment and recognize already perceived objects if it returns the next time. The issue of identifying an object that is looking different from another direction is bypassed by the usage of a “perfect sensor” that detects the same properties from any angle. Since the agent is totally, autonomously navigating without the information of its absolute position in the form of field-coordinates (comparable to a GPS coordinate), it can only use the information of the odometric sensor to remember the past path and to connect different locations together. In a first attempt, a path from e.g. Stone A to Stone B is divided into a few but most distinctive segments. These segments are mapped to the corresponding thing-presentations including affects that have been experienced during the path’s segment. A corresponding word-presentation-chain for the path could be: heading straight north for a distance of 5 steps, then rotate to west and move straight for further 3 steps. The term north is used to indicate the necessity of an individual reference direction the agent is aware of. This reference position is based upon the initial direction of the agent. Due to the simulated uncertainty of the odometric sensor, the reference position is altered during runtime. Past assumptions and knowledge is therefore also occupied with an error. In further research, the size of the environment and the number of objects and possible actions will be increased. However, the focus of the research work lies on the proposed concept of information representation, where thing-presentations, word-presentations and corresponding affects are building a new semantic network in robot-ontologies. Self-localization is only seen as a test-application for this model.
V. RESULTS
Using the simulation environment and the use-case for recognition of previously perceived object and self-
localization, thing-presentations, word-presentations and affects were connected to a psychoanalytically inspired semantic web, representing the knowledge of an autonomous, embodied agent. This knowledge consists of different types of objects and an estimation of how the objects are aligned in relative coordinates. Fig. 5 shows the information representation within the agent’s memory during the scenario which is described in the previous section. Thing-presentations are always connected to the corresponding affects, generically named
as Af1 to Af8 in the figure. Since the types of thing- and word-presentations have been predefined, the result lies in the alignment and connection of those representations during the simulation runtime. In future research, the performance of object recognition in the information representation model has to be tested and compared to other implementation approaches such as [14].
VI. CONCLUSION
This article discusses a psychoanalytic inspired model for information representation. This model bases on three components, which are called thing-presentation, word-presentation, and affects, labeled as memory-symbols. The psychoanalytic type of information representation does not contradict the common used psychological one – implicit, explicit memory. Both can be converted to the other. The distinction to the type of information is a generally accepted one and for sciences like neurology or psychology a legitimate one. However for the area of engineering it raises some questions as implicit or explicit information only defines an attribute of the information but does not make a statement on its structure which is quite more interesting in this field. An open question is also to define a way which enables the system to classify data. On the other side, the psychoanalytic inspired way of information representation defines a rather simple information structure. Future work has to show the performance of the model on the base of the example which is given in Section IV. The concept of scenario recognition has to be refined and implemented. A way to focus on incoming symbol data will be introduced on the base of the drive concept.
REFERENCES [1] D. Dietrich, G. Zucker, “New Approach for Controlling Complex
Processes. An Introduction to the 5th Generation of AI,” Conference on Human System Interaction Proceedings, 2008.
Fig. 5 Information representation in the agent

.
389
[2] M. Solms and O. Turnbull,” The Brain and the Inner World,” Karnac/Other Press, Cathy Miller Foreign Rights Agency, London, England, iSBN 1-59051-017-8, 2002.
[3] A. Damasio, “Descartes' Error: Emotion, Reason, and the Human Brain,” Penguin, 2005.
[4] R. Brooks, “Elephants Don't Play Chess,” Robotics and Autonomous Systems 6, 1990, 1, pp. 3-15.
[5] R. Pfeifer, & J. Bongard, “ How the body shapes the way we think,”MIT Press, 2007.
[6] W. Dodd and R. Gutierrez, “The role of episodic memory and emotion in a cognitive robot,” IEEE International Workshop on Robots and Human Interactive Communication, pp. 692–697, 2005.
[7] A. Sloman, R. Chrisley, and M. Scheutz, “Who Needs Emotions?: The Brain Meets the Robot,” Oxford University Press, Oxford, New York, The Architectural Basis of Affective States and Processes, pp. 203–244, 2005.
[8] H. Markram, “The Blue Brain Project,” Nature Reviews, Neuroscience, pp. 153-160, Feb. 2006, 7.
[9] S. Freud, „Das Ich und das Es,“ Studienausgabe. Psychologie des Unbewußten. Fischer Taschenbuch Verlag GmbH, 1975.
[10] D. Dietrich, G. Fodor, G. Zucker, and D. Bruckner, Eds., “Simulating the Mind – A Technical Neuropsychoanalytical Approach,” 1st ed. Springer, Wien, 2009.
[11] E. Tulving, Elements of Episodic Memory. Oxford: Clarendon Press, 1983, iSBN 0198521022.
[12] A. Baddeley, Human Memory: Theory and Practice. Psychology Press, 1997, iSBN 0-86377-431-8.
[13] D. Tecuci, “A generic episodic memory module,” University of Texas at Austin, Tech. Rep., 2005.
[14] W. C. Ho, K. Dautenhahn, C. L. Nehaniv, and R. T. Boekhorst, “Sharing memories: An experimental investigation with multiple autonomous autobiographic agents,” IAS-8, 8th Conference on Intelligent Autonomous Systems, pp. 361–370, 2004.
[15] J. Laird, A. Newell, P. Rosenbloom, "Soar: An Architecture for General Intelligence". Artificial Intelligence, 33, pp. 1-64, 1987.
[16] S. Bovet, R. Pfeifer , “Emergence of Delayed Reward Learning from Sensorimotor Coordination,” IEEE International Conference on Intelligent Robots and Systems, 2272-2277, 2005.
[17] M. Fend, S. Bovet, R. Pfeifer, ”On the influence of morphology of tactile sensors for behavior and control,” Robotics and Autonomous Systems, vol 54, 8, 686-695, 2006.
[18] R. Velik, “A Bionic Model for Human-like Machine Perception,” Vienna University of Technology, Institute of Computer Technology, 2008.
[19] T. Deutsch, A. Gruber, R. Lang, R. Velik, ”Episodic Memory for Autonomous Agents,” Proceedings of 2008 Conference on Human System Interaction (HSI 2008), pp. 621-626, Krakau, 2008.
[20] R. Lang, H. Zeilinger, T. Deutsch, R. Velik, B. Mueller, “Perceptive learning — A psychoanalytical learning framework for autonomous agents,” Human System Interactions, 2008 Conference on, 639-644, 2008.
[21] S. Freud, ”Trieb und Triebschicksale“ (Instincts and their Vicissitudes), Internationale Zeitschrift für (ärztliche) Psychoanalyse, III, pp. 84-100, G.W., X, pp. 210-232, S.E. 14: pp. 117-140, 1915.
[22] H. Zeilinger, T. Deutsch, B. Mueller, and R. Lang, ”Bionic inspired decision making unit model for autonomous agents,” ICCC 2008, StaraLesna, pp. 259–264, 2008.
[23] T. Deutsch, H. Zeilinger, R. Lang, ”A New Approach to Building Automation System Controls Based on Human Like Thinking,“ unpublished.
[24] W. Bucci, “Psychoanalysis and cognitive science. A multiple code theory.” New York: Guilford Press, 1997.
[25] J. Laplanche, „Das Vokabular der Psychoanalyse,“ Suhrkamp Taschenbuch Wissenschaft, Frankfurt am Main, iSBN 3-518-27607-7, 1973.
[26] P. Ekmann, “Emotions revealed: Recognizing faces and feelings to improve communications and emotional life,” New York: Henry Holt. 2002.
[27] R. Krause, „Affekte und Gefühle aus psychoanalytischer Sicht,“ Psychotherapie im Dialog, 3, pp. 120-127, 2002.
[28] C. Rösener, R. Lang, T. Deutsch & A. Gruber,”Action planning model for autonomous mobile robots,” Proceedings of 2007 IEEE International Conference of Industrial Informatics, pp. 1009-1014, 2007.
[29] R. Lang, D. Bruckner, G. Pratl, R. Velik & T. Deutsch, “Scenario Recognition in Modern Building Automation,” Proceedings of the 7th IFAC International Conference on Fieldbuses & Networks in Industrial & Embedded Systems (FeT 2007), pp. 305-312, 2007.
[30] M. Toda, “Man, Robot and Society.”, Martinus Nijhoff Publishing, 1982.
[31] D. Dörner, “Die Mechanik des Seelenwagens: Eine neuronale Theorie der Handlungsregulation (mechanics of the mindwaggon: a neuronal theory of actionregulation)” Huber, Bern, 2002.
[32] S. Luke, C. Cioffi-Revilla, L. Panait, and K. Sullivan, “MASON: A New Multi-Agent Simulation Toolkit”, Proceedings of the 2004 Swarmfest Workshop, 2004.


















