
Hands and face tracking for VR applications
27
1 Hands and face tracking for VR applications Adviser: Chih-Hung Lin Date:2010/12/14 Speaker: Chin He Hsu Javier Varona, Jose’ M. Buades, Francisco J. Perales U nidad de Gra´ficos y Visio´n por Ordenador, Dept. de m atematiques i Informatica, Universitat de les Illes Ba lears (UIB), crta. Valldemossa km. 7,5, 07122 Palma de Mallorca, Spain
-
Upload
maisie-joseph -
Category
Documents
-
view
28 -
download
0
description
Hands and face tracking for VR applications. Javier Varona, Jose’ M. Buades, Francisco J. Perales Unidad de Gra´ficos y Visio´n por Ordenador, Dept. de matematiques i Informatica, Universitat de les Illes Balears (UIB), crta. Valldemossa km. 7,5, 07122 Palma de Mallorca, Spain. - PowerPoint PPT Presentation
Transcript of Hands and face tracking for VR applications

1
Hands and face tracking for VR applications
Adviser: Chih-Hung Lin
Date:2010/12/14
Speaker: Chin He Hsu
Javier Varona, Jose’ M. Buades, Francisco J. Perales Unidad de Gra´ficos y Visio´n por Ordenador, Dept. de matematiques i Informatica, Universitat de les Illes Balears (UIB), crta. Valldemossa km. 7,5, 07122 Palma de Mallorca, Spain

2
Outline1.Introduction
2. Hands and face tracking algorithm
3.Visualization using H-Anim
4.Conclusion and future work

3
1.Introduction
• In order to allow a user to navigate in a 3D-space

4
Interactive 3D-space
5
• system must detect a new user– entering into the system’s environment– analyse him to set parameters– tracking interesting regions

6
2. Hands and face tracking algorithm
• tracking problem lies in identifying both hands and face in each image – detect skin-colour pixels– data association algorithm

7
2.1. Skin-colour segmentation module
• skin-colour detection– necessary to model the actor’s skin-colour in a pre
vious step

8
skin-colour sample
• transform these pixels from the RGB-space to HSL-space– hue and saturation values contain the chroma infor
mation
• two main problems– human skin hue values are near the red colour– saturation values are near 0

9

10
skin-colour distribution
•
• Gaussian model
•
•
1{ ,..., ,..., }, ( , )i n i i iX x x x x h s
1
1 n
ii
x xn
1
1( ), ( ) '
n
i ii
x x x xn
1
2
1 1( is skin) exp( ( )| |( )' )
2(2 ) | |p x x x x x

11

12
Contours of skin-colour blobs after the connected components process
13
2.2. Data association module
•
s (p , w , )l l l l
p ( , ):position in the 2D image
w ( , ) : size of the limb in pixels
: angle in the 2D image plane
x yp p
w h
14
Next linear scheme of prediction
•
• that an extreme limb will maintain the same velocity
p( ) p( ) p( 1)
p( ) p( ) p( 1)
t t t
t t t

15
Set of hypothesis
•
•
{h }, 3,
Where
h (p , w , )
l
l l ll
H l
1{ ,..., ,..., }, : blob with labeli M iB b b b b

16
• define an approximation to the distance from the x image pixel to the hypothesis h
• t=x p
n=R t',
where
cos sinR=
sin cos

17
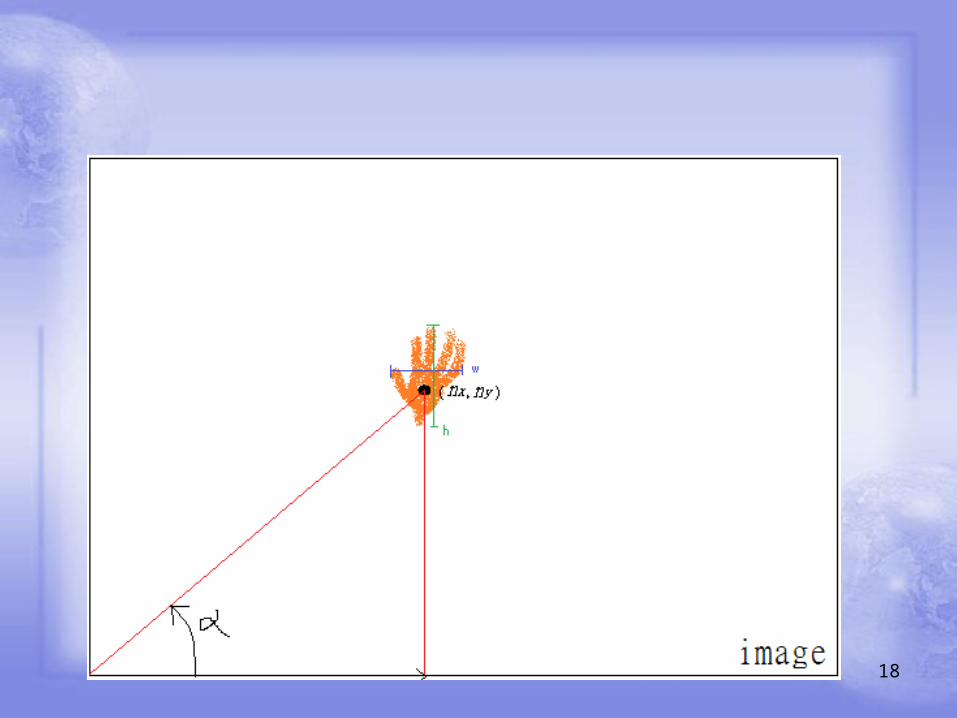
calculating the angle
• Normalized image pixel and the hypothesis centre
•
atan( / )x yn n
c ( , ),crossing point
cos
sin
x y
x
y
c c
c w
c h
18

19
• distance between an image pixel and a hypothesis
•
• if d( x ,h)<=0 , then x is inside the hypothesis h ,if d( x
,h)>0 , then x is outside the hypothesis h
(x,h) || n || || c ||d

20
• a blob with empty intersection with all hypotheses
• a pixel x of a blob is inside a limb hypothesis
x , min{ (x,h)} 0h H
b d
x , x= iff { (x,h)} 0B l d

21
Occlusion case solved using multiple labelling

22

23
2.3. 3D-point reconstruction

24
Complete procedure: color segmentation, data association and 3D reconstruction

25
3. Visualization using H-Anim
• H-Anim (humanoid animation)
• we use the H-Anim standard, this way we can collaborate with standard VRML (Virtual Reality Modeling Language ) models

26
3D position

27
4. Conclusion and future work
• proposed a new system
• human–computer interaction
• future work





