

H2O Machine Learning and Kalman Filters for Machine Prognostics - Galvanize SF
25
H2O Machine Learning and Kalman Filters for Machine Prognostics Hank Roark @hankroark [email protected]
-
Upload
jo-fai-chow -
Category
Technology
-
view
1.666 -
download
1
Transcript of H2O Machine Learning and Kalman Filters for Machine Prognostics - Galvanize SF

WHOAMI ILead,[email protected]
JohnDeere:Research,SoftwareProductDevelopment, HighTechVenturesLotsoftimedealingwithdataoffofmachines,equipment, satellites, weather,radar,handsampled, andon.Geospatial, temporal/timeseries dataalmostall fromsensors.Previouslyatstartupsandconsulting (RedSkyInteractive,Nuforia,NetExplorer, PerotSystems,afewofmyown)
Engineering&ManagementMITPhysicsGeorgiaTech
[email protected]@hankroarkhttps://www.linkedin.com/in/hankroark

IF YOUARE INTO DATA, THE IOTHAS IT

WHYTHIS EXAMPLE?
GETREADY FORBRONTOBYTES!!

WOW,HOWBIG ISABRONTOBYTE?

Image courtesy http://www.telecom-cloud.net/wp-content/uploads/2015/05/Screen-Shot-2015-05-27-at-3.51.47-PM.png
This much data wil l requirea fastOODA loop

EXAMPLE FROMTHE IOTDomain:PrognosticsandHealthManagementMachine:TurbofanJetEnginesDataSet:A.Saxena andK.Goebel(2008)."TurbofanEngineDegradationSimulationDataSet",NASAAmesPrognosticsDataRepository
PredictRemainingUseful LifefromPartialLifeRuns
Sixoperatingmodes,twofailuremodes,manufacturingvariability
Training:249jetengines runtofailureTest: 248jetengines

INCORPORATING PRIOR STATE
Disentangling the dynamic core: a research program fora neurodynamics at the large-scaleMICHEL LE VAN QUYENBiol. Res. v.36 n.1 Santiago 2003http://dx.doi.org/10.4067/S0716-97602003000100006
One option:Phase Space Embedding
Drawbacks:Incorporates knowledge from small number of
prior states
Curse of dimensionality

KALMANFILTER

OVERALL PIPELINE
Featureengineering
• Signalprocessing,featurecreation,featureselection
RegressionModels
• SupervisedMachineLearning
Lineardynamicalsystem
• Kalmanfilter

EXPLORATORY DATA ANALYSISBooleanIndexing
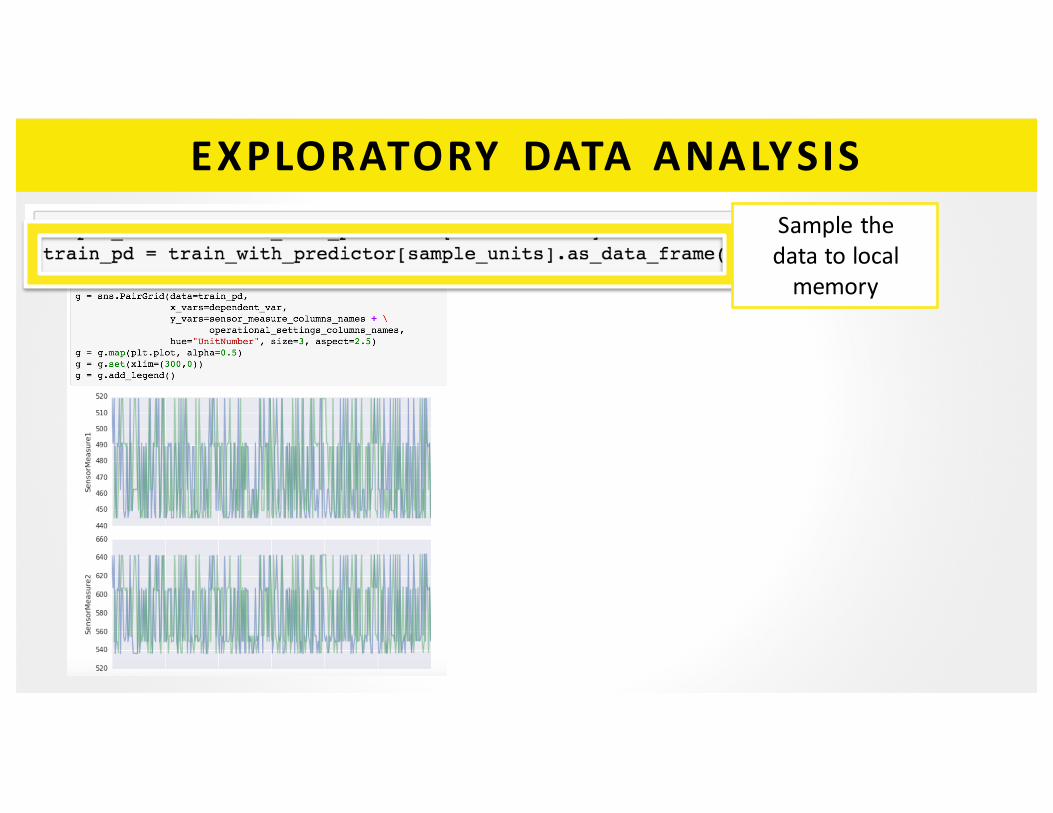
EXPLORATORY DATA ANALYSISSamplethedatatolocalmemory

EXPLORATORY DATA ANALYSIS
Useyourfavorite
visualizationtools
(Seaborn!)
Ugh,wherearetrends
overtimeTime
ZeroRemainingUsefulLife
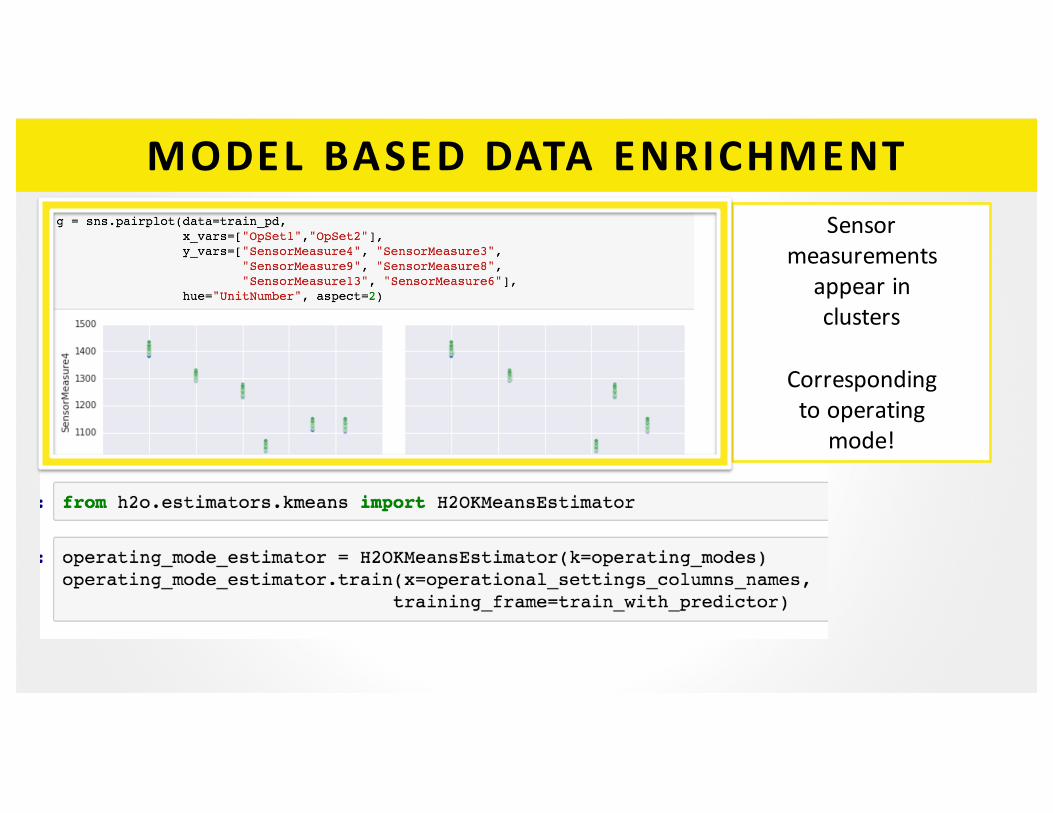
MODEL BASEDDATAENRICHMENTSensor
measurementsappearinclusters
Correspondingtooperating
mode!

FEATUREENGINEERING
UseH2Ok-meanstofindcluster
centers

FEATUREENGINEERING
Enrichexisting datawithoperatingmode
membership

MOREFEATUREENGINEERINGFornon-constant
sensormeasurements
withinanoperatingmode,
Standardizeeachsensormeasurementbyoperatingmode
Basedonthetrainingdata

TRENDSOVER TIME!
BeforeH2ODataPreparation
ReadyforH2OLearning
Time Time

MODELING - SIMPLE
ConfigureanEstimator
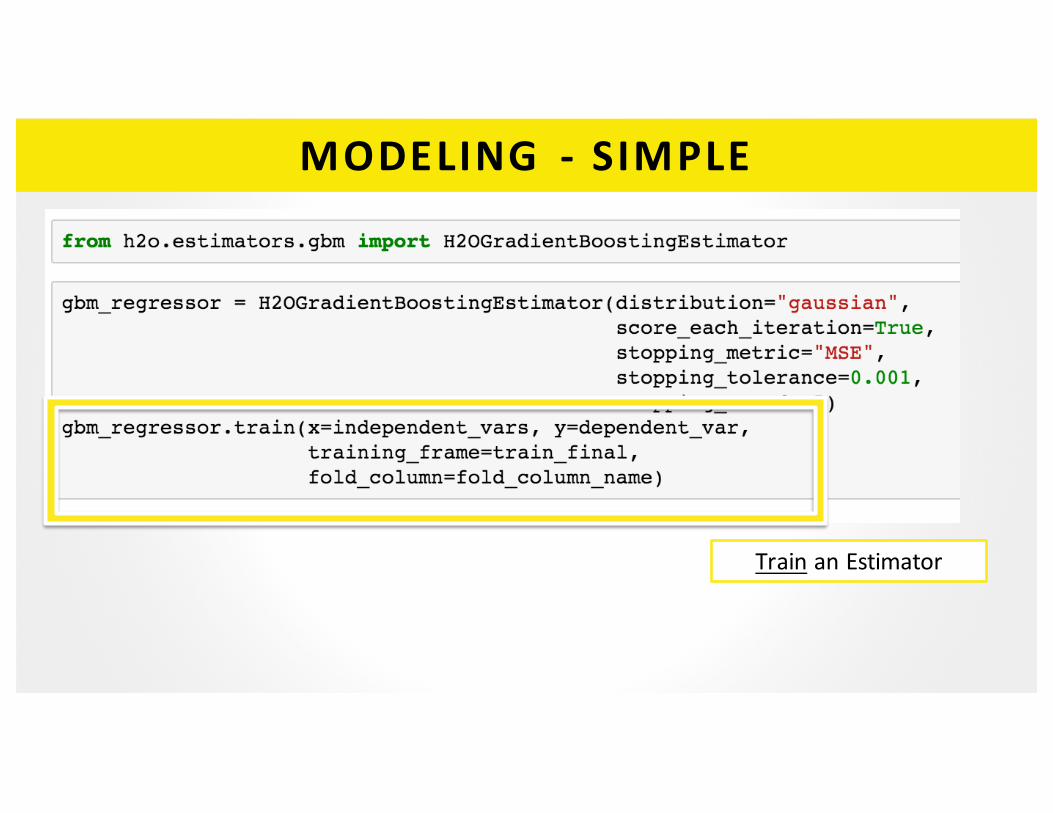
MODELING - SIMPLE
Train anEstimator

KALMANFILTER INPUTS
State:[CyclesRemaining,RateofChangeofCyclesRemaining]
StateTransition:[[1,1],[0,1]](takes[RUL,-1]->[RUL-1,-1])
Observations:regressionoutputofeachmodelinensemble
ObservationCovariance:meansquareerrorofeachmodelontrainingdata(diagonalmatrix)
InitialState:[Meanofmodels,-1]

KALMAN - POSTPROCESSING

SIGNAL PROCESSING +MACHINE LEARNING
• Filtering,Convolution(integrals,differences,etc)• Timedomaintofrequencydomain(Fourier)orotherdomain(wavelet)
• Dynamictimewarpingforsequencesimilarity• Spatial-temporalanalytics• ConvolutionNeuralNetsandLSTM-RNN
RESOURCES• Downloadandgo:http://www.h2o.ai/download• Documentation:http://docs.h2o.ai/• Booklets,Datasheet:http://www.h2o.ai/resources/• Github:http://github.com/h2oai/• Training:http://learn.h2o.ai/• ThispresentationandassociatedJupyter notebook
(lookin2016_02_23_MachineLearningAndKalmanFiltersForMachinePrognostics):https://github.com/h2oai/h2o-meetups/

THANK YOU


















