
Gurobi Optimization - edgestone-it.com · The Gurobi Products Gurobi Solvers Mi dMixed-It P...
90
Gurobi Optimization Pushing the Frontiers of Optimization Performance
-
Upload
truongphuc -
Category
Documents
-
view
224 -
download
0
Transcript of Gurobi Optimization - edgestone-it.com · The Gurobi Products Gurobi Solvers Mi dMixed-It P...

Gurobi Optimization
Pushing the Frontiers of Optimization Performance

Agenda
12:00-12:25 Introduction◦ Bob Bixby
12:25-12:50 Accessing Gurobi◦ Greg Glockner12 50 1 25 G bi T h l 12:50-1:25 Gurobi Technology◦ Bob Bixby
1:25-1:40 Break 1:40-2:00 Gurobi Best Practices◦ Greg Glockner
2:00-2:20 Performance 2:20-2:30 The Future◦ Bob Bixby
Question & Answer
2© 2010 Gurobi Optimization18-Jun-10

Gurobi Optimization
Gurobi Optimization, Inc.p , Incorporated July, 2008 Founders: Zonghao Gu, Ed Rothberg, Bob Bixby
Product Releases Version 1.0: May 2009
LP simplex & MIP LP simplex & MIP Version 2.0: October 2009
LP simplex & MIP performance improvementsp p p Version 3.0: April 2010
LP barrier, MIP performance improvements
3© 2010 Gurobi Optimization18-Jun-10
Company Business Model
Focus on math programming solversp g g◦ Our business is helping our customers succeed with
math programming solutions◦ Provide the best possible support from people whoProvide the best possible support from people who
know math programming Be a flexible partner◦ Licensing models that meet user needs◦ Licensing models that meet user needs◦ Clear, upfront pricing
Be the technology leader◦ Build the best available math programming
technology
4© 2010 Gurobi Optimization18-Jun-10

The Gurobi Products
Gurobi SolversMi d I t P i◦ Mixed-Integer Programming Deterministic, parallel
◦ Linear Programming Dual and primal simplexAll d d f◦ All standard features
APIs◦ Simple command-line interface◦ Python interactive interfacePython interactive interface◦ C, C++, Java, Python callable libraries◦ All standard modeling languages
Gurobi CloudEC2 offering◦ EC2 offering
Commercial and Academic Licenses◦ Licensing options and pricing available at www.gurobi.com
5© 2010 Gurobi Optimization18-Jun-10

Gurobi Gurobi Commercial PartnersCommercial Partners
GurobiGurobi NonNon Commercial PartnersCommercial PartnersGurobi Gurobi NonNon--Commercial PartnersCommercial Partners
ParamILS
6© 2010 Gurobi Optimization18-Jun-10

Expanding the Reach of Optimization
7© 2010 Gurobi Optimization18-Jun-10
Expanding the Reach of O i i iOptimization Parallel at no extra chargeg◦ Gurobi was the first
Free Trial Licenses◦ Automated download and license generation◦ Automated download and license generation◦ 500 variable by 500 constraint size limit
Academic Program◦ Free single-user licenses for academics Automated download and license generation Bi-weekly validationy
The Gurobi Cloud◦ You only pay for what you use
8© 2010 Gurobi Optimization18-Jun-10

Free Academic Licenses
Here are the steps:p
Request a Gurobi account Download and install software Generate and download license key Install and validate the license key◦ Does a reverse DNS lookup of origin domain
Must be repeated at least once every 2 weeks◦ Must be repeated at least once every 2 weeks
9© 2010 Gurobi Optimization18-Jun-10

Expanding the reach of Optimization
Over 1500 free academic licenses issued 50% outside the US 30% appear to be outside the OR community◦ Martin Albrecht, University of London, "I am a grad student in the
Information Security Group (ISG) at Royal Holloway, University of London. I work on algebraic aspects of symmetric cryptology under the supervision of Carlos Cid.”
◦ Shoibal Chakravarty, Energy Group, Princeton University, "Chakravarty is developing a global CO2 emissions attribution profile.”
◦ Tai-Hsuan Wu, EE, U Wisconsin, "His research interests are in the area of computer-aided design and with an emphasis on power aware and high performance design techniques, parallel optimization, and grid computing environments."
10© 2010 Gurobi Optimization18-Jun-10

What’s New in Gurobi 3.0
11© 2010 Gurobi Optimization18-Jun-10

New in Gurobi 3.0
Parallel Barrier Optimizer New .NET API Significantly Improved MIP performance◦ Dominance techniques Symmetry checking
◦ Additional and improved cutting planes Submip cuts
◦ New heuristics◦ New heuristics◦ New presolve reductions
Other ◦ Improved memory management in MIP◦ Improved memory management in MIP◦ API for accessing multiple MIP solutions◦ New parameters and more access to parameters Examples: MIPfocus parameter, more access to heuristicsp p ,
12© 2010 Gurobi Optimization18-Jun-10

Questions?Questions?

Accessing GurobiAccessing Gurobi

Methods to access Gurobi
Command-line executable◦ Simple tool to test model files
Programming interfaces◦ APIs to build and solve models
Modeling systems◦ Wide variety of commercial and free partners◦ Wide variety of commercial and free partners
15© 2010 Gurobi Optimization18-Jun-10
Gurobi programming interfaces
Interactive shell Object-based◦ C++, Java, .NET new!
Matrix-based◦ C
16© 2010 Gurobi Optimization18-Jun-10

Common structure
Streamlined◦ Gurobi Attributes replace long list of get/set
functions
Fast◦ Lazy updates process model changes in a batch◦ Lazy updates process model changes in a batch
Low memory overhead Low memory overhead
17© 2010 Gurobi Optimization18-Jun-10

Gurobi interactive shell
A complete programming environmentp p g g◦ Based on Python language◦ Supports all Gurobi algorithms and features
Easily build virtually any optimization applicationapplication◦ Solve a model file◦ Build a model through codeg◦ Solve a sequence of models◦ Import / export with databases
18© 2010 Gurobi Optimization18-Jun-10
Simple shell example
m = read("afiro.mps")m read( afiro.mps )m.optimize()if m.status == GRB.OPTIMAL:m.printAttr('X')
19© 2010 Gurobi Optimization18-Jun-10

Simple shell example – 2
m = read("afiro.mps")m read( afiro.mps )m.optimize()if m.status == GRB.OPTIMAL:for i in m.getVars():print i.VarName, i.X, i.RC
20© 2010 Gurobi Optimization18-Jun-10

Modeling in the shell
# Create a new modelm = Model("mip1")
# Create variables and objective: x + y + 2z# Create variables and objective: x y 2zx = m.addVar(0.0, 1.0, -1.0, GRB.BINARY, "x")y = m.addVar(0.0, 1.0, -1.0, GRB.BINARY, "y")z = m addVar(0 0 1 0 2 0 GRB BINARY "z")z = m.addVar(0.0, 1.0, -2.0, GRB.BINARY, z )
# Integrate new variablesm.update()
21© 2010 Gurobi Optimization18-Jun-10

Modeling in the shell – 2
# Add constraint: x + 2 y + 3 z <= 4m.addConstr(LinExpr([1.0, 2.0, 3.0], [x, y, z]), GRB.LESS_EQUAL,
4.0, "c0")
# Add constraint: x + y >= 1m.addConstr(LinExpr([1.0, 1.0], [x, y]), GRB.GREATER_EQUAL, 1.0,
"c1")c1 )
# Solve and write solution to filem optimize()m.optimize()m.write("mip1.sol")
22© 2010 Gurobi Optimization18-Jun-10

Object modeling interfaces
Represent models using objectsp g j◦ Objects for variables◦ Objects for constraintsF i h d i Function methods to create constraints, columns
Similar structure◦ C++, Java, .NET, PythonC++, Java, .NET, Python
23© 2010 Gurobi Optimization18-Jun-10

Objects in a simple constraint:1x + y ≥ 1
C++ JavaC++model.addConstr(x+y>=1, "c1");
Javaexpr = new GRBLinExpr();expr.addTerm(1.0, x);
ddT (1 0 )expr.addTerm(1.0, y);model.addConstr(expr,
GRB.GREATER_EQUAL, 1.0, "c1");c1 );
24© 2010 Gurobi Optimization18-Jun-10
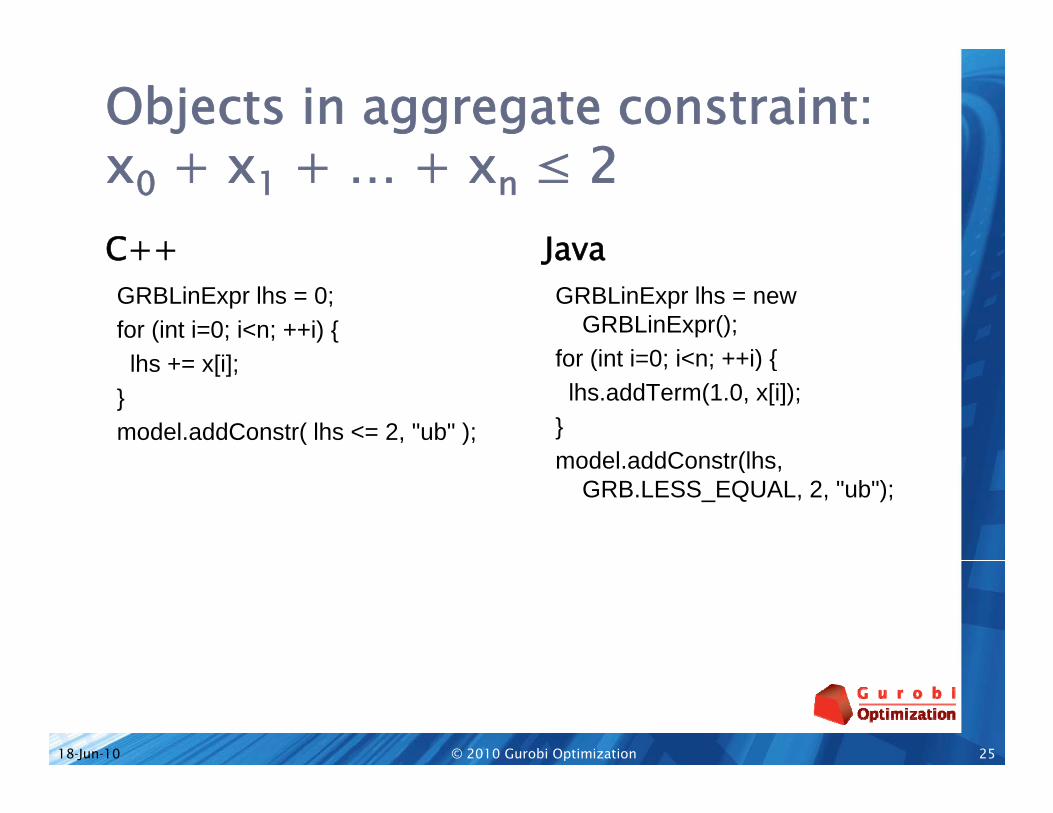
Objects in aggregate constraint:2x0 + x1 + … + xn ≤ 2
C++ JavaC++GRBLinExpr lhs = 0;for (int i=0; i<n; ++i) {lh [i]
JavaGRBLinExpr lhs = new
GRBLinExpr();for (int i=0; i<n; ++i) {lhs += x[i];
}model.addConstr( lhs <= 2, "ub" );
for (int i=0; i<n; ++i) {lhs.addTerm(1.0, x[i]);
}model addConstr(lhsmodel.addConstr(lhs,
GRB.LESS_EQUAL, 2, "ub");
25© 2010 Gurobi Optimization18-Jun-10

C: Sparse matrix interface
Compressed sparse row formatp p◦ GRBaddconstrs()
Compressed sparse column format◦ GRBaddvars()
St d d f t d b l Standard formats used by many solvers◦ Use simple arrays to represent Matrix coefficients Index positions for these coefficients◦ Virtually no changes required to existing code
26© 2010 Gurobi Optimization18-Jun-10

Accessing attributes
Object interfacej◦ get/set methods on the objects◦ C++ example
d l (GRB I A N NZ )nz = model.get(GRB_IntAttr_NumNZs);var.set(GRB_DoubleAttr_UB, 1.0);
Matrix interface◦ get/set functions by type (int, double, char, string)◦ C example◦ C example
status = GRBgetintattr(model, "NumNZs", &nz);status = GRBsetdblattrelement(model, "UB", varidx, 1.0);
27© 2010 Gurobi Optimization18-Jun-10

Role of attributes
Unified system to access model elementsy◦ Attributes work the same across all Gurobi
interfaces – C, C++, Java, .NET, Python
Attributes refer to model elements◦ Access via a basic set of get and set functions Attribute name is specified as a parameter◦ Replaces many functions used by other solvers
Full list in Attributes section of Reference Manual
28© 2010 Gurobi Optimization18-Jun-10

Selected attributes
The model itself◦ Number of variables, constraints, nonzeros◦ Solve time
S l ti t t ( ti l i f ibl t )◦ Solution status (optimal, infeasible, etc.) Individual variables◦ Solution value upper bound lower boundSolution value, upper bound, lower bound◦ Objective coefficients◦ Type – continuous, binary, general integer, etc.
Individual constraints◦ Values for right-hand side, slack, dual
29© 2010 Gurobi Optimization18-Jun-10

Questions?Questions?

Gurobi TechnologyGurobi Technology
Gurobi Parallel Barrier Solver

Gurobi Barrier
New deterministic parallel barrier solver in pGurobi 3.0◦ Parallel:
k f h h Makes use of as many cores as your machine has Gurobi license is always a parallel license◦ Deterministic: Same result each time
33© 2010 Gurobi Optimization18-Jun-10

Gurobi Barrier Features
Barrier solver includes:◦ Parallel sparse Cholesky factorization Dominant computation in barrier Highly tuned factorization kernelsHighly tuned factorization kernels Achieve 80-90% of machine peak performance
◦ Other parallel steps AAT computation AAT computation Sparse matrix reordering, using latest reordering techniques
◦ Multiple central correctionsS hi ti t d d l d f i bl h dli◦ Sophisticated dense column and free variable handling
◦ Crossover algorithm to provide a basic solution
34© 2010 Gurobi Optimization18-Jun-10

Barrier Is Interesting
When solving an LP from scratch…◦ 267 models that require more than 1s for either dual or
barrier◦ Geomean barrier runtime (including crossover): 1 core: 1.00x 4 cores:0.70x
Not so interesting when you have advanced start information…◦ For a set of 240 MIP models that require 1-10s to solve:For a set of 240 MIP models that require 1 10s to solve: 5.3x slower if you use barrier to reoptimize the node
relaxations
35© 2010 Gurobi Optimization18-Jun-10

Barrier Is Getting More Interesting
Barrier can make effective use of parallelism p(unlike simplex)◦ Cholesky factorization, AA’ computation, triangular
solve, etc.solve, etc.◦ Explosion of parallelism in recent years: Multi-core chips SSE instruction set SSE instruction set◦ More coming: Multiply-accumulate instruction in next generation
x86 chipsx86 chips 2x peak floating-point performance
Yet more cores
36© 2010 Gurobi Optimization18-Jun-10

Barrier and Simplex –J i d h HiJoined at the Hip Even when solving an LP from scratch, barrier g ,
relies heavily on simplex◦ Simplex much more numerically stable
h l ll h ll l b h Much less numerically challenging to solve Ax=b than ADATx = b
◦ Crossover becomes more important as barrier gets faster For models that require > 1s: 1 core: crossover is 10% of total barrier runtime1 core: crossover is 10% of total barrier runtime 4 cores: crossover is 15% of total barrier runtime Crossover more than 50% of runtime for 24% of models
37© 2010 Gurobi Optimization18-Jun-10

Improving Crossover
Significant improvements in stability of g p ycrossover in Gurobi 3.0◦ Losses of feasibility less common and less
t t hicatastrophic Developed new options for building initial
crossover basiscrossover basis◦ Can sometimes avoid lengthy crossover steps
With improvements in barrier performance, improving crossover will become more and more important
38© 2010 Gurobi Optimization18-Jun-10

MIP IMIP Improvements
39© 2010 Gurobi Optimization18-Jun-10

Improving a MIP Solver
Improvements can be plotted on two axes:p p
SpeedupBig speedups onBig speedups on Big speedups onlots of models
g speedups oa few models
Modest speedupson lots of models
Generality
40© 2010 Gurobi Optimization18-Jun-10

New Ideas
Speedup
Nine out of tenideas end up here
Experience
GeneralityExperiencegenerally keeps you away from here
41© 2010 Gurobi Optimization18-Jun-10

Gurobi 3.0
S dSpeedup Symmetry
SubMIP cutsNew presolve red.
BarrierNetwork cuts
SubMIP cuts
Cut tuning
Generality
42© 2010 Gurobi Optimization18-Jun-10

MIP D i iMIP Domination
43© 2010 Gurobi Optimization18-Jun-10

MIP Domination
MIP domination◦ A feasible solution X is (strictly) dominated by a
feasible solution Y, if Y has objective value as good as (better than) X.( )◦ Suppose for any feasible solution X with Xj > a,
there exists another feasible solution Y with Yj <= a such that Y dominates X. Then we need only yconsider xj <= a.
Use of domination information Use of domination information◦ Reduce or simplify MIP models◦ Avoid unnecessary search
44© 2010 Gurobi Optimization18-Jun-10
Domination Techniques
Presolve reductions Dominated nodes detection Symmetry breaking
45© 2010 Gurobi Optimization18-Jun-10

A Simple Presolve Reduction
ConsiderMin 5 x1 + 4 x2 + 11 x3 + 4 y1 + 2 y2s.t. x1 + x2 + 3 x3 + y1 + y2 <= 7
2 x1 + 2 x2 + 2 x3 + y1 <= 101 2 3 1 2 > 0x1, x2, x3, y1, y2 >= 0
x1, x2, x3 are integers
ll l l Parallel columns◦ x1 and x2 are parallel and x1 is dominated because of its
objective coefficient
46© 2010 Gurobi Optimization18-Jun-10
Dual Presolve Reductions
ConsiderMin 5 x1 + 4 x2 + 11 x3 + 4 y1 + 2 y2s.t. x1 + x2 + 3 x3 + y1 + y2 <= 7
2 x1 + 2 x2 + 2 x3 + y1 <= 101 2 3 1 2 > 0x1, x2, x3, y1, y2 >= 0
x1, x2, x3 are integers
l b d h Dual bound tightening◦ Consider the dual of any relaxation at a B&B node◦ Let d1 and d2 be dual variables for two constraints ◦ Use dual constraints corresponding to y1 and y2, we can
tighten dual bounds to d1 <= 2 and d2 <= 2◦ Reduced cost for x3 >= 11 – 3 * 2 – 2 * 2 = 1, so x3 can be ,
fixed to 0
47© 2010 Gurobi Optimization18-Jun-10

Another Presolve Reduction
Consider◦ a x + b y = c◦ x, y are integer variables◦ a, b and c are integers, a > 1◦ Assume gcd(a b) 1◦ Assume gcd(a,b) = 1 Otherwise a Euclidean reduction is possible
◦ Observation: Then x(mod b) and y(mod a) are constants. Reduction Reduction◦ Substitute y = a z + d (d is easy to compute).◦ z has a smaller search space than y
General application General application◦ Can easily be extended to general “all integer”
constraints.
48© 2010 Gurobi Optimization18-Jun-10

Dominated Nodes
0-1 knapsack examplep pMin 5 x1 + 6 x2 + 7 x3 + 9 x4 + sum wj xj
3 x1 + 4 x2 + 5 x3 + 6 x4 + sum aj xj <= b
At a node At a node◦ (x1, x2, x3, x4) = (1, 0, 0, 1)
Let◦ cost(x1, x2, x3, x4) = 5 x1 + 6 x2 + 7 x3 + 9 x4◦ a(x1, x2, x3, x4) = 3 x1 + 4 x2 + 5 x3 + 6 x4
Then ◦ cost(0,1,1,0) < cost(1,0,0,1) ◦ a(0,1,1,0)= a(1,0,0,1)◦ The node is dominatedThe node is dominated
49© 2010 Gurobi Optimization18-Jun-10

Dominated Nodes
Consider a general MIPgMin eTx + fTy + gTzs.t. A x + B y + C z <= b
A, B and C are matricesA, B and C are matricesx, y, z are variable vectors x are binarysome y z are integer or binarysome y, z are integer or binary
At a node◦ x is fixed to (branched to) x*
h “f d ” b d◦ y represent the extra “freedom” beyond x Note just for simplicity, we assume◦ All constraints are inequalitiesq◦ Variables x are binary
50© 2010 Gurobi Optimization18-Jun-10

Dominated Nodes
Lets(y*) = Min eTx + fTy
s.t. A x + B y <= A x* + B y*x are binaryx are binarysome y are integer or binary
If s(y*) < eTx* + fTy* for all y*, then the node is dominateddominated
Two alternatives◦ If |x| is small and y is empty, computing s(.) is often cheap.
However s(.) < eTx* is rare in those cases.◦ With non-empty y, where y has special properties, we can
sometimes solve for s(y*).
51© 2010 Gurobi Optimization18-Jun-10

Dominated Nodes
Fixed charge sub-networksg◦ Binary variables indicate whether arcs are open◦ x are the binary variables branched to one
S th t f t i l◦ Suppose the support of x contains a cycle. ◦ Then using y defined by this cycle, we can conclude
that the node is dominated.
52© 2010 Gurobi Optimization18-Jun-10

Symmetry
Definition◦ Given a MIP
Min { cTx | A x <= b, integrality conditions on x}L t◦ Letα: a column permutation of Aβ: a row permutation of Aβ pPC: a set of all column permutationsPR: a set of all row permutationsA t i d fi d◦ A symmetry group is defined asG = {α in PC | there exists β in PR, such that
(β ,α)(A) = A, α(c) = c and β(b) = b}(β , )( ) , ( ) β( ) }
53© 2010 Gurobi Optimization18-Jun-10

Exploiting Symmetry
Find symmetry groupy y g p
Use to improve MIP search
54© 2010 Gurobi Optimization18-Jun-10

Symmetry
Finding the Symmetry groupg y y g p◦ Considerable published work on graph
automorphismsSeveral computer programs are available e g NAUTY Several computer programs are available, e.g. NAUTY and SAUCY
◦ Easy to translate MIP symmetry problem into graph hi (P 2005)automorphisms (Puget 2005).
55© 2010 Gurobi Optimization18-Jun-10

Symmetry
Exploit in MIP searchp◦ Several papers over last10 years Adding cuts: Rothberg (2000)
F th t i d M t (2002) Fathom symmetric nodes: Margot (2002) Orbit branching: Ostrowski, Linderoth, Rossi, and
Smriglio (2007).◦ Commercial MIP software Introduced in CPLEX 9 Substantially improved in CPLEX 10Substantially improved in CPLEX 10
56© 2010 Gurobi Optimization18-Jun-10

Symmetry
Gurobi 3.0◦ Implemented symmetry detection directly using the matrix◦ Apply orbital branching plus several additional ideas◦ 28% of models in our test set have symmetry28% of models in our test set have symmetry◦ Performance is affected on 50% of those with symmetry◦ Many unsolvable models become solvable◦ 25% geometric speedup on the whole set (including those◦ 25% geometric speedup on the whole set (including those
without symmetry)
57© 2010 Gurobi Optimization18-Jun-10

C i PlCutting Planes
60© 2010 Gurobi Optimization18-Jun-10

Cutting Planes
New cutting planesg p◦ Network cuts◦ Submip cutsI f i i i Improvement of existing cut routines◦ Aggregation for MIR and flow cover◦ Cut filterCut filter
61© 2010 Gurobi Optimization18-Jun-10

Network Cut
Finding network structure ◦ Use a simple heuristic to find a set of network rows ◦ Identify associated fixed-charge indicator variables
SeparationSepa at o◦ Sort arcs based on relaxation values◦ Use the order to construct a spanning tree (forest) ◦ RepeatRepeat Remove a non-leaf arc from the spanning tree splits
network into two parts Aggregate each of the two parts Look for violated flow-cover cut
Performance◦ 10% speedup on models with network structure.p p
62© 2010 Gurobi Optimization18-Jun-10

SUBMIP Cut
Solve submip to generate cutsp g◦ Expensive, not typically applied in default◦ Used in Mipfocus=2 and 3M i id Main idea◦ Rather different from ideas that solve a sub-MIP to
separateseparate◦ Closer to some ideas developed for TSP
63© 2010 Gurobi Optimization18-Jun-10

Cut Changes Summary
Overall performance improvementp p◦ 20% speedup on our internal model set
Largest effect is on hard models when using fMipfocus = 2 or 3
64© 2010 Gurobi Optimization18-Jun-10

Questions?Questions?

Gurobi Best PracticesGurobi Best Practices
Performance tuning
Gurobi Optimizer is designed to be fast and p grobust with default parameters
But a few high-level parameters may improve performance, particularly for MIP
67© 2010 Gurobi Optimization18-Jun-10

General tuning advice
Presolve: controls the level of presolvep-1 Automatic setting (default)0 Off1 Conservative1 Conservative2 Aggressive
M l k d l i l◦ More presolve can make a model easier to solve◦ But presolve can be time-consuming
68© 2010 Gurobi Optimization18-Jun-10

General tuning advice – 2
Threads: controls number of parallel threadsp◦ More threads may speed up barrier & MIP◦ For MIP, more threads requires more memory
D f lt l b f /◦ Default value: number of cores/processors
◦ Take care if processor supports hyperthreading Ex: Intel Core i7 processors
69© 2010 Gurobi Optimization18-Jun-10

LP tuning advice
LPMethod: controls algorithm to use for LP or gnode LPs in MIP
0 Primal simplex1 Dual simplex (default)1 Dual simplex (default)2 Barrier – not recommended for MIP
RootMethod: controls whether to use primal, dual or barrier for root LP in MIP◦ Same values as LPMethod above
70© 2010 Gurobi Optimization18-Jun-10

MIP tuning advice
MIPFocus: Sets the focus of the MIP solver0 Balance good feasibles & optimality (default)1 Focus on finding feasible solutions2 Focus on proving optimality2 Focus on proving optimality3 Focus on moving the best bound
N i G bi O i i 3 0◦ New in Gurobi Optimizer 3.0
71© 2010 Gurobi Optimization18-Jun-10

MIP tuning advice – 2
Cuts: Global control over the level of cuts-1 Automatic setting (default)0 Off1 Conservative1 Conservative2 Aggressive3 Very aggressive
◦ More cuts can make a model easier to solve◦ But cuts can be time-consumingg◦ Similar settings for individual types of cuts
72© 2010 Gurobi Optimization18-Jun-10

MIP tuning advice – 3
Heuristics: Controls the amount of time spent pin MIP heuristics
D f l l 0 05◦ Default value: 0.05◦ Larger values produce more and better feasible
solutions◦ But spending more time on heuristics leads to
slower progress on the bound
73© 2010 Gurobi Optimization18-Jun-10

Pitfalls to avoid
Setting parametersg p
Lazy model updates
74© 2010 Gurobi Optimization18-Jun-10

Setting parameters
Parameters are set on a Gurobi environment
A Gurobi model has a copy of the Gurobienvironment◦ Each model can use its own set of parameters
But you must set parameters on the environment◦ But you must set parameters on the environment for the model
75© 2010 Gurobi Optimization18-Jun-10
Parameters example
setParam("TimeLimit", 3600)m1 = read("m1.mps")m1.setParam("RootMethod", 2)setParam("NodeLimit", 1000)setParam( NodeLimit , 1000)m2 = read("m2.mps")m2.setParam("MIPFocus", 1)
Result◦ m1: TimeLimit=3600, RootMethod=2◦ m2: TimeLimit=3600, NodeLimit=1000, MIPFocus=1
76© 2010 Gurobi Optimization18-Jun-10

Lazy updates
Gurobi updates models in batch modep
Must call update() to use model elements◦ Ex: Call update() after creating a variable before
using it in a constraint
Model creation and updates are efficient
77© 2010 Gurobi Optimization18-Jun-10

PerformancePerformance

B i P fBarrier Performance

LP Performance Benchmarks
Performance test sets:◦ Mittelmann LP test sets: LP problems – barrier w/ crossover and simplex
38 d l 38 models http://plato.asu.edu/ftp/lpcom.html
◦ Our own broader test set: Publicly available models, plus customer models
Test platform:◦ a Linux PC (2 67 GHz Intel Core 2)◦ a Linux-PC (2.67 GHz Intel Core 2)
80© 2010 Gurobi Optimization18-Jun-10

LP Performance – Public BenchmarkG bi CPLEX 12 1Gurobi vs. CPLEX 12.1
Dual Simplex (Mittelmann Test Set)#Models Speedup Speedup
Gurobi 2.0 Gurobi 3.038 1.3X 1.4X
Barrier w/ Crossover (Mittelmann Test Set)#Models Speedup
Gurobi 3 0Gurobi 3.038 1.9X
◦ Additional interesting comparison:g p 1.40X faster for the barrier step 1.55x faster for the crossover step No, it’s not a contradiction

MIP P fMIP Performance

MIP Performance Benchmarks
Performance test sets:Mitt l ti lit t t t◦ Mittelmann optimality test set: 55 models, varying degrees of difficulty http://plato.asu.edu/ftp/milpc.html
◦ Mittelmann feasibility test set:ff f f 33 models, difficult to find feasible solutions
http://plato.asu.edu/ftp/feas_bench.html◦ Mittelmann infeasibility test set: 11 models, objective is to prove infeasibility http://plato.asu.edu/ftp/infeas.html
◦ Our own broader test set: A set of 647 models that require between 1s and 10000s to solve on
four coresP bli l il bl d l l f d l Publicly available models, plus a few customer models
Test platform:◦ Q9450 (2.66 GHz, quad-core system)
83© 2010 Gurobi Optimization18-Jun-10

MIP Performance –Gurobi Internal Test Set Gurobi V3.0 vs. V2.0 (P=4)
Gurobi Internal Test Set( )
◦ 2458 total models in test set 1350 solve in < 1 second 794 solve by at least one in < 10000 seconds 314 solved by neither in < 10000 seconds
Ti # M d l S dTime # Models Speedup> 1s 794 1.59x> 10s 521 1 95x> 10s 521 1.95x> 100s 295 2.92x> 1000s 144 6 73x> 1000s 144 6.73x
MIP Performance –Biggest Improvement on Hard Models
794 models: Unsolvable in 10,000 seconds
Biggest Improvement on Hard Models
,◦ Gurobi 2.0 – 50◦ Gurobi 3.0 – 9
d f Median performance◦ Median improvement: 1.02% (1/2 models, no change)◦ 27% of models > 1 5X◦ 27% of models > 1.5X ◦ 20% of models > 2.0X

MIP Performance –P bli B h kPublic Benchmarks Gurobi 2.0 vs CPLEX 12.1:
P=1 P=4Optimality 1.56X 1.74XFeasibility 4.22X -Infeasibility - 2.43
G bi 3 0 CPLEX 12 1 Gurobi 3.0 vs CPLEX 12.1:P=1 P=4
Optimality 1 75X 1 87XOptimality 1.75X 1.87XFeasibility 4.76X -Infeasibility - 4.09X
86© 2010 Gurobi Optimization18-Jun-10

P ll l P fParallel Performance

Parallel Performance (V2.0 data)
Parallel speedups (Gurobi P=1 vs P=4):p p ( )P=4 speedup
>1s 1.54>10s 1.64>100s 1.79
CPLEX reported (for CPLEX 11) 1.36X speedup for P=4 on their broader set for models taking more th 1than 1s
88© 2010 Gurobi Optimization18-Jun-10

The Future: Performance, P f P fPerformance, Performance
Projected Gurobi Roadmap
Version 4.0 – November 2010◦ QP and MIQP◦ LP performance enhancements
MIP f h t◦ MIP performance enhancements Version 5.0 – April 2011◦ SOCP and MISOCPSOCP and MISOCP◦ MIP performance enhancements
Version 6.0◦ Planning will begin in November 2010
90© 2010 Gurobi Optimization18-Jun-1090
© 2010 Gurobi Optimization

Company Business Model
Focus on math programming solversp g g◦ Our business is helping our customers succeed with
math programming solutions◦ The best possible support from people who knowThe best possible support from people who know
math programming Be a flexible partner◦ Licensing models that meet user needs◦ Licensing models that meet user needs◦ Clear, upfront pricing
Be the technology leader◦ Build the best available math programming
technology
91© 2010 Gurobi Optimization18-Jun-10

Questions?Questions?


















