GuidanceonSetup,Calibration,andValidationofHydrodynamic...
26
Review Article GuidanceonSetup,Calibration,andValidationofHydrodynamic, Wave, and Sediment Models for Shelf Seas and Estuaries Jon J. Williams 1 and Luciana S. Esteves 2 1 MottMacDonaldHouse,8-10SydenhamRoad,CroydonCR02EE,UK 2 BournemouthUniversity,TalbotCampus,Poole,DorsetBH125BB,UK Correspondence should be addressed to Jon J. Williams; [email protected] Received 2 August 2017; Accepted 4 October 2017; Published 19 December 2017 Academic Editor: Arnaud Perrot Copyright © 2017 Jon J. Williams and Luciana S. Esteves. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. e paper is motivated by a present lack of clear model performance guidelines for shelf sea and estuarine modellers seeking to demonstrate to clients and end users that a model is fit for purpose. It addresses the common problems associated with data availability, errors, and uncertainty and examines the model build process, including calibration and validation. It also looks at common assumptions, data input requirements, and statistical analyses that can be applied to assess the performance of models of estuaries and shelf seas. Specifically, it takes account of inherent modelling uncertainties and defines metrics of performance based on practical experience. It is intended as a reference point both for numerical modellers and for specialists tasked with interpreting the accuracy and validity of results from hydrodynamic, wave, and sediment models. 1. Introduction Although a need to standardise model build, calibration, and validation processes around one agreed approach is widely acknowledged, only limited guidance is available (e.g., [1, 2]) and often ambiguous and sometimes conflicting advice if offered in the grey literature (e.g., [3, 4]). A wide variety of different modelling practices are employed by consultants and academics, and frequently insufficient attention is given to the potential errors associated with the measured (and modelled) data used for model calibration and validation. is can result in poor model performance and unreliable model predictions. Without an agreed methodology and a performance standard for model calibration and validation, there is a risk that the quality of different approaches will vary, efforts will be wasted following inefficient or inappropriate calibration methods, and inconsistencies in methodologies will make model in- tercomparisons problematic. is paper provides an evidence-based review and presents examples of calibration data sources and of model calibration and validation practices for estuarine and shelf sea models. It is intended to provide guidance to the assessment and use of model calibration data and to offer procedural clarity and simplification to the model calibration and vali- dation process. In doing so, it acknowledges that some degree of compromise between the complexity of the natural system and the model representation must be reached. For this reason, the paper does not address complex modelling issues around wave-driven currents, littoral drift, and shoreline evolution where specialist models (e.g., the nonhydrostatic version of XBeach and CFD) must be employed. Since the accuracy of the model calibration depends critically on the calibration data used, attention is given to some of the most common issues associated with data quality. e paper also provides (a) the end users of model data more specialist guidance on modelling approaches, (b) the cali- bration procedures most frequently applied, and (c) the uncertainty in the model predictions. e paper draws on practical experience of modelling and expands on the earlier and limited guidance on the model calibration and validation that focus on Eulerian point-based criteria defining model performance (e.g., [2, 5, 6]). It also takes account of results and recommendations from modelling case studies where cali- bration issues have been the focus of the work (e.g., [7–10]). Hindawi Advances in Civil Engineering Volume 2017, Article ID 5251902, 25 pages https://doi.org/10.1155/2017/5251902
Transcript of GuidanceonSetup,Calibration,andValidationofHydrodynamic...

Review ArticleGuidance onSetup, Calibration, andValidation ofHydrodynamic,Wave, and Sediment Models for Shelf Seas and Estuaries
Jon J. Williams1 and Luciana S. Esteves2
1Mott MacDonald House, 8-10 Sydenham Road, Croydon CR0 2EE, UK2Bournemouth University, Talbot Campus, Poole, Dorset BH12 5BB, UK
Correspondence should be addressed to Jon J. Williams; [email protected]
Received 2 August 2017; Accepted 4 October 2017; Published 19 December 2017
Academic Editor: Arnaud Perrot
Copyright © 2017 Jon J. Williams and Luciana S. Esteves. *is is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, and reproduction in anymedium, provided the original work isproperly cited.
*e paper is motivated by a present lack of clear model performance guidelines for shelf sea and estuarine modellers seeking todemonstrate to clients and end users that a model is .t for purpose. It addresses the common problems associated with dataavailability, errors, and uncertainty and examines the model build process, including calibration and validation. It also looks atcommon assumptions, data input requirements, and statistical analyses that can be applied to assess the performance of models ofestuaries and shelf seas. Speci.cally, it takes account of inherent modelling uncertainties and de.nes metrics of performance basedon practical experience. It is intended as a reference point both for numerical modellers and for specialists tasked with interpretingthe accuracy and validity of results from hydrodynamic, wave, and sediment models.
1. Introduction
Although a need to standardise model build, calibration, andvalidation processes around one agreed approach is widelyacknowledged, only limited guidance is available (e.g., [1, 2])and often ambiguous and sometimes con6icting advice ifo7ered in the grey literature (e.g., [3, 4]). A wide variety ofdi7erentmodelling practices are employed by consultants andacademics, and frequently insu9cient attention is given to thepotential errors associated with the measured (and modelled)data used for model calibration and validation.*is can resultin poormodel performance and unreliable model predictions.Without an agreed methodology and a performance standardfor model calibration and validation, there is a risk that thequality of di7erent approaches will vary, e7orts will be wastedfollowing ine9cient or inappropriate calibration methods,and inconsistencies in methodologies will make model in-tercomparisons problematic.
*is paper provides an evidence-based review andpresents examples of calibration data sources and of modelcalibration and validation practices for estuarine and shelf seamodels. It is intended to provide guidance to the assessment
and use of model calibration data and to o7er proceduralclarity and simpli.cation to the model calibration and vali-dation process. In doing so, it acknowledges that some degreeof compromise between the complexity of the natural systemand the model representation must be reached. For thisreason, the paper does not address complex modelling issuesaround wave-driven currents, littoral drift, and shorelineevolution where specialist models (e.g., the nonhydrostaticversion of XBeach and CFD) must be employed.
Since the accuracy of the model calibration dependscritically on the calibration data used, attention is given tosome of the most common issues associated with data quality.*e paper also provides (a) the end users of model data morespecialist guidance on modelling approaches, (b) the cali-bration procedures most frequently applied, and (c) theuncertainty in the model predictions. *e paper draws onpractical experience of modelling and expands on the earlierand limited guidance on the model calibration and validationthat focus on Eulerian point-based criteria de.ning modelperformance (e.g., [2, 5, 6]). It also takes account of results andrecommendations from modelling case studies where cali-bration issues have been the focus of the work (e.g., [7–10]).
HindawiAdvances in Civil EngineeringVolume 2017, Article ID 5251902, 25 pageshttps://doi.org/10.1155/2017/5251902

Speci�cally, the paper describes (1) general factors thatmust be considered at the outset of all numerical modellingactivities, (2) the quantitative assessment of model per-formance, (3) data sources and modelling guidelines for hy-drodynamic, wave, and noncohesive and cohesive sedimentmodels, and (4) morphological models. Special attention isgiven to one of the greatest challenges to the modellingcommunity concerned with measuring and modelling sedi-ment transport and associated erosion and accretion.While thefocus of the work is based on practical applications ofmodellingshelf sea and estuarine processes, many of the issues discussedare relevant to a wide range of geophysical models.
2. What Is Model Calibration and Validation?
It is important from the outset to de�ne the terms commonlyused by numerical modellers: (a) calibration is a processwhich requires the adjustment of certain model parametersto achieve the best performance of the model for speci�clocations and applications; (b) veri�cation ascertains if themodel implements correctly the assumptions made; and (c)validation seeks to establish the agreement between thepredictions and the observations (e.g., [11]). Validation isachieved by running the model using data covering an al-ternative period and/or a di�erent location without makingany additional adjustment to the model parameters (e.g.,[12]). Of course, the accuracy of the model outputs cannot beproved to be greater than the accuracy of the original cal-ibration data used, and validation does not imply veri�ca-tion, nor does veri�cation imply validation. However, inpractice, when measured data are available for the systembeing modelled, validation is often blended with veri�cation[11]. If a comparison of measurements and model resultssuggests that the predictions from the model are close to themeasurements, then the implemented model is assumed tobe both a veri�ed implementation of the assumptions anda valid representation of the system being modelled.
Irrespective of the model accuracy, the model calibrationmust express (a) express the level of agreement achieved; (b)express how realistic is the representation of the processes,and (c) de�ne the criteria by which it has been judged asbeing �t for purpose. �e quantitative assessment of dataerror, accuracy, and uncertainty in models then de�nesmetrics against which model performance can be judged.
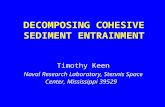
As an illustration of the typical calibration and validationprocesses applied in most coastal and estuarine models,a schematic diagram of steps followed for a hydrodynamicmodel is shown in Figure 1. In the initial model run, modelparameters are set to the recommended values provided bythe modelling software guidance (i.e., “factory settings”).Critical parameters a�ecting model performance (e.g., bedroughness) are then adjusted to achieve the best possibleagreement between model predictions and measurements.Care must be taken to ensure the values set for these adjustedparameters are physically meaningful and appropriate [1].Achieving a good model calibration for the wrong reasons isas bad as a poorly calibrated model.
A useful �rst step in the calibration and validation processis the determination of the most sensitive parameters in the
model.While expert judgment can be helpful, less-experiencedmodel users should undertake sensitivity analyses. Here, theaim is to determine the rate of change in model output withrespect to changes in model inputs (parameters). To undertakesensitivity analyses, it is necessary to identify key model pa-rameters and to de�ne the parameter precision required for thecalibration (e.g., [13]). Sensitivity analysis approaches can be(a) local, where parameter values are changed one at a time, or(b) global, where all parameters are adjusted simultaneously.Both approaches have drawbacks. For example, the sensitivityof one parameter often depends on the value of other relatedparameters so that the correct values of other �xed parameterscannot be determined. In global sensitivity analyses, manysimulations are required. Despite these drawbacks, both ap-proaches provide insight into the sensitivity of the modelparameters and are necessary steps in the model calibrationprocess. However, “manual” calibration of models, whereparameters are adjusted in a stepwise fashion, can be verytime-consuming and ine�cient.
�e second step in the calibration process is undertaken toreduce the uncertainty in the model predictions. Normally,this uses carefully selected values for model input parameters
Adjust model parameters
Run model
Compare modelled andmeasured water levels
Correct amplitude?
Correct phase?
Tidal propagation?
Calibrated model
Compare modelled andmeasured flow speeds
Correct peak flow?
Correct flow direction?
Flood/ebb dominance?
Verified model
Calib
ratio
nVa
lidat
ion
Figure 1: Schematic diagram of typical model calibration andvalidation steps required for a hydrodynamic model.
2 Advances in Civil Engineering

and compares model predictions with observed data for thesame conditions. In common with the process described instep 1, this is often done iteratively without any .xed rule andis guided by the experience of the user and knowledge of theprocesses being modelled. *e third step in the calibrationprocess involves validation of the model output of interest(e.g., water level, 6ow speed, and direction). Validation in-volves running a model using parameters that were de-termined during the calibration process and comparing thepredictions to observed data not used in the calibration.
*e use of automated techniques for model calibration isnow widespread (e.g., [14]). Typically, autocalibration pro-cedures rely on Monte Carlo or other sampling schemes toestimate the best choice of values for multiple input pa-rameters. For example, the autocalibration procedure de-scribed by van Liew et al. [15] is based on the shuJedcomplex evolution algorithm of Duan et al. [16], whichallows for the calibration of model parameters based ona single objective function. While autocalibration can pro-vide a powerful, labour-saving tool that can be used tosubstantially reduce the frustration and subjectivity thatfrequently characterises manual calibrations, care must beexercised when using these approaches to ensure the the-oretical boundaries for each speci.c input parameter are notviolated.
Frequently, the evaluation of postcalibration numericalmodel results is subjective and based on specialist in-terpretation of graphical output only. Examples of thisapproach include water-level curves or discharge time series,current vector distributions, and spreading patterns of heatand spills. Indeed, for many practitioners, a good visual .tbetween model predictions and observations is often su9-cient to demonstrate good model performance without theneed to quantify this further. Objective measures of modelperformance are also not new and are used, for example, inthe Deltares (semi-) automated model calibration tools andin adjoint modelling (e.g., [17]). However, the increasingcomplexity of model functionality, and the use of modeloutput by technical end users requiring information onmodel accuracy to reduce risks, has led to an increasing needfor better guidance on how to quantify and evaluate theperformance of models. A description of the calibrationprocess applied to a biological-physical model [18] providesa useful example of typical procedures followed in thecalibration process.
3. General Considerations
Irrespective of the model being used, there are several ge-neric elements that require consideration prior to andduring the model build phase. *ese elements will eachimpact on model performance and include bathymetry, bedroughness, model grid setup, the incorporation of speci.cstructures and features, data accuracy and uncertainty, andmodel boundary conditions.
3.1. Bathymetry. One of the most common problems asso-ciated with the calibration of a hydrodynamicmodel concerns
errors in the underlying bathymetric data.*e use of accuratebathymetry is pivotal in all shelf sea and estuarine modellingstudies, and e7ort is required to ensure that the best possiblebathymetric information is used. As standard practice, theanalysis of bathymetric data should ensure (e.g., througha data review of the study area) that the most recent ba-thymetry survey data are used. Key features and contoursshould be checked against historical maps and charts. LiDARdata across water surface must be discarded. Suitable griddimensions should be determined that re6ect the spatialdistribution of the bathymetric data, and where data are al-ready gridded, poor interpolations/reductions/extrapolationsonto model grids must be identi.ed by reference to theoriginal data sources.
A summary of bathymetric and topographic datarequirements for models is shown in Table 1 [3]. Here,a distinction is made between application types, with themost exact being associated with scheme designs (e.g., 6ooddefences) with less accuracy required for appraisal and/orstrategy studies. *ese distinctions are used in other tablesand are useful as they de.ne the accuracy of key data re-quired to build a model for di7erent applications. *ecorrect use of the most appropriate data for a given ap-plication can save time and e7ort. While Table 1 re6ects thebathymetric and topographic data requirements for mod-elling estuaries, including speci.cations for average dis-tances between survey positions, the minimum acceptablechannel cross-section spacing, survey age, and the age andresolution for LiDAR data, they provide equally usefulguidelines for shelf sea models.
Careful checks on the horizontal and vertical survey datumshould always be undertaken prior to any model runs, andmodels should always aim to use a common reference datum.Typically for vertical positions, national reference points (e.g.,Ordnance Datum Newlyn (ODN) in the UK), chart data(related to the lowest astronomical tide or to mean lower lowwater), or mean sea level (MSL) is used widely. However, whilenational reference points are useful in local-scale models, MSLhas wider utility in larger regional models at all geographicallocations. In the UK waters, the Vertical O7shore ReferenceFrame (VORF (http://www.ucl.ac.uk/vorf)) provides spatialmaps of values that can be used to convert between verticaldata. Similarly, VERTCON [19] and more recently VDATUM(http://vdatum.noaa.gov/) in the USA allow vertically trans-formation of geospatial data among a variety of tidal, ortho-metric, and ellipsoidal vertical data. In addition, satellitealtimetry data can also be used to inform the o7set betweenone or more tidal layers and the relevant satellite or geoid-based datum.
To illustrate a simple datum error, Figure 2(a) showsnearshore bathymetry from a coastal location in southernPortugal with a clear vertical datum problem. *is issue isresolved in Figure 2(b) using a simple datum correction.*isis a simple case for illustrative purposes only, and oftendatum errors are more complex and harder to correct.
Other errors can arise in hydrodynamic models due to(a) changes in charting properties (e.g., older Admiraltycharts from the UK projected to OSGB which has nowchanged to WGS84), (b) data types, which have inherent
Advances in Civil Engineering 3

weaknesses (e.g., poorly interpolated bathymetry which maylead to an underestimation of depth and thus tidal volume),and (c) postprocessing using GIS or other “smoothing”software. To minimise the errors introduced in the modelbathymetry, it is recommended initially to visually inspectthe raw bathymetry using suitable software (e.g., Matlab orFledermaus). Abrupt changes in elevations and spikes in datashould be treated with caution. It is also helpful to examinegradients, and where possible, to compare interpolated datawith known soundings.
Careful consideration should be given to data in-terpolation since interpolation routines can vary signi.-cantly between programs, and the options available (e.g.,linear, nearest neighbour, inverse distance weighted, andspline methods) can also result in signi.cantly di7erentanswers. Furthermore, some interpolation methods arebetter suited to sparse data sets (e.g., inverse distanceweighted) and others to well-populated data distributions(e.g., nearest neighbour). *e selection of the interpolationmethods should always recognise this. It is important alsoto consider the scale of features on the bed that requiresresolving in a model. For example, large bedforms, such assand banks, redirect 6ows and must be resolved in themodel. Smaller bedforms such as sand waves providea resistance to the 6ow that can be parameterised throughthe bed friction term. Eliminating the need to resolve thesefeatures individually can reduce the model run time. Inother applications, sand waves may need to be resolved on
an individual basis to assess, for example, migration ratesand pipeline or cable routes.
Time and care spent ensuring that the underlying ba-thymetry has been correctly interpolated (datum, pro-jection) and that it is free of spurious values and correctlyrepresents the features of interest will contribute to im-proving model performance. Without good underlyingbathymetric data, the task of trying to calibrate a hydrody-namic model will be extremely di9cult, especially in shallowcoastal and estuarine areas. For example, Cea and French[20] have investigated how errors in bathymetry can impacton the performance of estuarine shallow water models. *eydemonstrate that correcting errors in the measured depthcan be signi.cantly more e9cient than a “classic” calibrationapproach based only on adjustment of the hydrodynamicroughness of the bed.*eir proposed bathymetry calibrationframework may o7er improved performance from thecurrent generation of numerical models. Further guidanceon the use of bathymetry in models is given by Plant et al.[21, 22] and Mourre et al. [23].
3.2. BedRoughness. *e hydrodynamic roughness of the bed(hereafter termed “bed roughness”) is a primary calibrationvariable for all coastal and estuarine models. It is also es-sential for modelling other processes accurately such assediment transport and wave attenuation. Irrespective ofthe method chosen for de.ning bed roughness, values are
Table 1: Bathymetry and topographic data requirements for models (A � design; B � appraisal; C � strategy; and U � unsatisfactory); fromDefra/EA [3].
Type Average distance between surveyeddepths (m)
Minimum channel cross sectionspacing (km)
Time since survey(years)
LiDAR age(years)
LiDARresolution (m)
A ≤200 0.1 ≤5 ≤2 ≤1.0B 200–500 0.5 5 to 10 2 to 5 1 to 2C 500–1000 1.0 10 to 20 5 to 10 2 to 5U >1000 >1.0 >20 >10 >5
1.0
1.5
2.0
0.5
00 0.5 1.0 1.5 2.0 0 0.5 1.0 1.5 2.0
4
2
0
−2
−4
−6
−8El
evat
ion
(mAO
D)
(km
)
(km)(a) (b)
Figure 2: (a) Bathymetry with a clear vertical datum problem and (b) the same bathymetry after datum correction.
4 Advances in Civil Engineering

typically manipulated iteratively by the user within theranges reported in the literature. Any bed roughness can begenerally assigned to a so-called equivalent sand roughness,ks [24]. *e equivalent sand roughness depends on the ar-rangement (pattern), distance (density), and shape of theroughness elements such as sand grains and ripples.However, in most models, bed roughness is typically par-ameterised by (a) a drag coe9cient de.ned at a speci.edheight above the bed, (b) the Manning number, n [25], or (c)the Chezy number, C [26].
To illustrate the range of drag coe9cient values appro-priate for di7erent estuarine and coastal environments, Table 2shows empirically derived values of the drag coe9cient C100measured at 1m above the bed for di7erent bottom types. Inthe absence of data to de.ne the bed roughness accurately,these “typical” values are often employed in model applica-tions. However, in many cases, this is an oversimpli.cation,and care must be taken to obtain as much information aspossible about bed characteristics so that appropriate bedroughness values can be assigned.
In “industry-standard” models such as MIKE21 andDelft3D, “roughness maps” can be used to de.ne the spatialdistribution of bed roughness values across the modeldomain. A good account of this approach is given byLefebvre and Lyons [27]. Figure 3 presents a typical ex-ample of a bed roughness map showing the spatial dis-tribution of (a) the measured median grain size, D50,obtained from seabed samples and (b) the derived dragcoe9cient, Cd, which accounts for D50 and bedforms de-tected in a multibeam survey.
Bed roughness has beenmapped by an ADCP (e.g., [28]),and high-resolution bathymetry and granulometry sampleshave been used by Huybrechts et al. [29] to derive bedroughness maps used in a TELEMAC model (cf. [30, 31]).Recently, the use of high-resolution multibeam sonar hasprovided bathymetric data at a resolution of less than 1mand revealed the details of sea bed features (e.g., DORIS(http://www.dorsetwildlifetrust.org.uk/doris.html)) as wellas provided information on sediment properties. *e use ofthese data in modelling studies is currently experimental andrequires high computing power to resolve the details.However, it o7ers the possibility of better de.ning bedroughness and thus may contribute signi.cantly to reducingthe e7ort needed for model calibration.
3.3. Model Grid Setup. *e selection and setup of the modelgrid is a very important initial stage in the model buildprocess. While some models still employ regular gridstructures, most models now employ some form of 6exiblemesh usually comprising triangular elements. *is approachallows high resolution of areas of interest and lower reso-lution over areas where bathymetry and/or processes arelargely spatially invariant. In virtually all coastal and estu-arine applications, the use of 6exible mesh models providesthe best model grid solution (e.g., [32]).
Taking a generic estuarine model as an example, somekey points about model grids emerge: (a) the model gridshould be designed to ensure the grid resolution can de.nethe main morphological features (including structures) thatcould have in6uence on hydrodynamics; (b) narrow chan-nels and banks should have at least three grid cells (pref-erably 5) to determine the base or crest widths; (c) as far aspossible areas of increased grid resolution should follow thecourse of the main channels, particularly in a curvilineargrid; and (d) when considering the location of upstream anddownstream boundaries in the model, boundaries shouldnot be .xed too close to areas of interest. However, this maybe constrained by the actual aims of the modelling as well asavailable boundary data. Further examples of the issuesarising when de.ning a model grid are given by Hsu et al.[33], Kernkamp et al. [34], Liu and Ren [35], and Maynardand Johnson [36].
Table 3 shows an example of the typical model gridresolution required for estuarine models intended for studiesof water levels and 6ow velocities [3]. Table 3 indicates also theminimum number of model grid points required to correctlyrepresent features such as channels and sand banks in themodel. Similar grid requirements apply equally to coastalmodels. It is noted that a .ne grid resolution (<2m) is re-quired to correctly represent the deliberate breaching of 6ooddefences when designing managed realignment schemes.
During the process of grid generation, irrespective of themodelling software used, interpolation of the bathymetrywill take place. Again using the example of a generic es-tuarine model to illustrate some key points, the followingchecks should be made on completion of bathymetric in-terpolation processes: (a) the gridded bathymetry must showthe same characteristics as the original bathymetry; (b) thegridding process must not displace and/or narrow/constrictchannels; (c) di7erent interpolation methods should beassessed; (d) channels must not be widened or narrowed,particularly when these make up a considerable proportionof the estuary cross section; and (e) depths adjacent to theboundaries should be inspected to ensure correct in-terpolation has occurred.
A further key point to note concerns the spatial reso-lution in the computational grid of a given model. Typically,a model prediction is only applicable at the spatial resolutionde.ned by the computational grid. In contrast, the mea-surements, typically used to calibrate and verify modelpredictions, are obtained at a single location and representthe local environment only. *us, when comparing a modelprediction with a measured value at a point, considerationmust be given to the tolerance of this spatial resolution. Most
Table 2: Empirically derived values of the drag coe9cient (at 1mabove the bed) for di7erent bottom types; from Soulsby [50].
Bed type C100
Mud 0.0022Mud/sand 0.0030Silt/sand 0.0016Sand (unrippled) 0.0026Sand (rippled) 0.0061Sand/shell 0.0024Sand/gravel 0.0024Mud/sand/gravel 0.0024Gravel 0.0047
Advances in Civil Engineering 5

often, the grid cell most closely colocated with the declareddeployment location is used in model/measurement in-tercomparisons. If the grid size is large, the single pointmeasurement may not be representative of the wider area inthe model grid element. Conversely, if the instrument isdeployed on a mooring line that has the capacity to move(such as a wave buoy), then, through time, the instrumentmay pass through multiple grid points if the model hasa .ne-scale resolution.
In some circumstances, data extraction from a grid celladjacent to the measurement location may better representthe actual conditions at the measurement point if that pointlies close to the boundary of a model element. Depending onthe model grid resolution, it is advisable therefore to extractmodel outputs from all grid cells adjacent to the measure-ment location and to make comparisons with theobservations.
Taking the modelling of 6uvial bedforms as an example,El Kheiashy et al. [37] discuss the selection of an appropriatemodel grid. In common with many modelling applications,
a compromise must be reached between the resolutionneeded to de.ne the bathymetry accurately and the con-sequent execution time required for a certain grid resolution.*eir study showed that the apparent bed resistance (shearstress) and bedform steepness decreased with increasing gridspacing. Increasing the grid spacing also created arti.cialbedform .elds giving rise to grid-dependent resistance. *emodel grid therefore has a signi.cant in6uence on the modelpredictions. It is therefore important to be aware of theseissues when interpreting model results and to check themwhenever possible against all available data sources.
3.4. Model Boundary Conditions. Experienced modellingpractitioners will ensure that the intended boundary typeis being used at each open boundary and that the cell no-tation and order of data are correct. Indeed, most industry-standard models (e.g., Delft3D) give a visual representationof the boundaries for checking purposes. It is recommendedpractice to align boundaries with the dominant 6ow direction,
Table 3: Recommended model grid resolution for 6ood studies in estuaries (A � design; B � appraisal; C � strategy; and U � unsatisfactory);from Defra/EA [3].
Type Resolution for water level (m) Resolution for 6ow velocity (m) Grid point needed to resolve key features†
A ≤5 ≤2 >8B 5 to 10 2 to 4 5 to 7C 10 to 25 4 to 6 3 to 4U >25 >6 <3†Channels, sand banks, etc.
Land
Land
10 k
m
10 km
0.01 0.1 1.0 10.0Median grain diameter, D50 (mm)
10 km
0.015 0.020 0.025 0.030Drag coefficient, C100 (−)
Land
Land
(a) (b)
Figure 3: (a) Measured median grain size, D50, obtained from seabed samples and (b) the derived drag coe9cient, Cd, which accounts forD50 and bedforms detected in a multibeam survey.
6 Advances in Civil Engineering

tidal characteristics (avoiding amphidromes), waves, or geo-graphic features.
*e input data to estuarine and shelf sea model bound-aries typically fall into 2 types: (a) a water level and (b) a 6ux(discharge). A water-level boundary is normally obtainedfrom existing models or measurements. In the case of model-derived boundary data, knowledge of how the boundary dataare produced by the larger model is required to de.ne theaccuracy and reliability (e.g., the number of constituents usedand the spatial and temporal resolution). However, a water-level boundary may not be applicable in areas with little or notidal height variation.
Noting that a 6ux (discharge) carries momentum andwater-level variations across the model domain have togenerate momentum, it can be argued that a 6ux (discharge)boundary condition is a more robust option for modelcalibration purposes. However, it is usually much moredi9cult to describe and apply. Reliance on water levels onlycan lead to serious model underperformance, and whereverpossible, attempts must bemade to use water level and 6ux atthe model boundaries.
Since the appropriate model calibration accuracy can beobtained, the following boundary condition issues also needto be fully understood: (a) spikes in modelled boundary dataattributable to instabilities in the original boundary data and(b) the selection of boundary data from larger model domainin unsuitable locations (e.g., close to land domain or ele-ments that dry).
A 6ux (discharge) can be applied at any model boundary(e.g., the point of freshwater input into an estuarine model).Generally, these data are provided by measurements orderived from a coarser-scale model. *e quality of these datadepends on the accuracy of the measuring device or model.It is recommended that in areas of small tidal variation, orwhere multiple boundaries are included, at least oneboundary is of a 6ux (discharge) type. It may be noted thatusing 6exible grids (or nested models), the model domaincan be extended to provide more robust boundary condi-tions owing to the large phase di7erences and gradient ef-fects across the model domain. However, in practice, manymodel setups use only water levels as the primary drivingforce, and in many applications, this proves to be successful.
It is recommended that if measured tidal levels are usedas model boundary conditions, then these are checked toensure consistent phase and amplitude with values obtainedfrom the harmonic constituents. While there will be smalldi7erences in amplitude attributable to meteorological ef-fects, the phase should be very similar.
4. Assessing Model Performance
In engineering and environmental modelling studies, the useof quantitative model evaluation methods is perceived asproviding more objective, consistent, and reproducible modelvalidation and assessment. However, it is also self-evident thatthe identi.cation of systematic or random errors in modelresults can also be detected quickly by the human eye. Inpractice, the assessment of model output is most e7ectivewhen both qualitative and quantitative approaches are
employed. For example, in most shelf sea or estuarine ap-plications, a combined visual and quantitative evaluation maybe achieved by presenting the spatial distribution of currentvectors for visual examination together with statistics thatquantify di7erences between measured and predicted currentspeeds from several locations. *ese statistics can provideuseful additional information about spatial coherence, cor-relations, and consistency and will often indicate explanationsand origins of the possible di7erences between the modelresults and the measurements.
It is also important that model results receive expertassessment, ideally against a conceptual understanding ofprocesses in each model domain established using a range ofdata resources. *is might include some obvious checks oncurrent speed, phase, and direction as well as more detailedinvestigations of sedimentation patterns. It is recommendedthat the initial assessment of model performance by what-ever means should be undertaken before running models forextended periods. However, the period chosen for thispreliminary examination depends on the processes beingmodelled. For example, a model of tidal currents run overone or two tidal cycles should be su9cient to determine howwell the model is performing and which adjustments mightbe necessary. On the other hand, a model of sedimenttransport may require considerable time before the e7ects ofnet sediment movement are evident through changes in thebathymetry.
4.1. Error, Accuracy, and Uncertainty of Model CalibrationData. As it de.nes the metric against which model per-formance will be judged, the assessment of error, accuracy,and uncertainty in the data used for model calibration is animportant step in the modelling process. Indeed, the ac-curacy of a numerical model is governed in part by thedegree of error present in the model calibration data. It isessential therefore to quantify error, accuracy, and un-certainty through understanding of the instrumentation, theinstrument deployment method, and its location as well asany data postprocessing issue.
It is necessary to distinguish between systematic andrandommeasurement errors. All measurements are prone tosystematic errors resulting, for example, from imperfectinstrument calibration (zero error) and changes in the en-vironmental conditions. Similarly, random errors are usuallypresent in a measurement or other observations and resultfrom inherently unpredictable 6uctuations in the readings ofa measurement apparatus or in the experimenter’s in-terpretation of an instrumental reading or the environment.Di7erent results for ostensibly the same repeated mea-surement are a clear indication of a random error. *e errorcan be quanti.ed by comparing multiple measurements andreduced by averaging multiple measurements. Systematicerrors cannot be detected this way because they always“push” the results in the same direction. However, whenidenti.ed, they are easier to eliminate from a data set usingtrend removal techniques (e.g., regression analysis).
Instruments collecting data from di7erent spatial loca-tions may also apply range-dependant spatial averaging to
Advances in Civil Engineering 7

the recorded data, leading to variable spatial resolution. Forexample, the horizontal averaging across spreading ADCPbeams results in a measurement footprint that increases insize with distance from the instrument. Taking as an examplethe calibration of a 2D depth-averaged hydrodynamic modelusing ADCP data, it is .rst necessary to derive the depth-mean current from the ADCP measurement. *is requiresmaking assumptions about the vertical structure of themarine boundary layer (often occupying the region from thebed to the air-water interface) before time and spatiallyaveraging the ADCP data to obtain a depth-mean currentspeed. *ese data processing steps introduce errors whichare di9cult to quantify. *ese problems are further com-pounded when attempting to extract a meaningful depth-mean representation of the current direction, especially inareas subject to signi.cant current veering (e.g., adjacent tosand banks). Furthermore, if a given measurement footprintis within a highly turbulent 6ow .eld, then the accuracy ofthe mean 6ow measurement will be governed by the sam-pling time and can lead to signi.cant errors if the 6ow is notsampled correctly at that location. With this example inmind when comparing predictions from a grid point ina model with measurements from single or multiple loca-tions, attention must be given to spatial and temporal in-consistencies that might lead to calibration error and/or bias.
4.2. Sensitivity Analyses. Sensitivity analyses are used tostudy how the uncertainty in the output from a model can beapportioned to di7erent sources of uncertainty in its inputs.Sensitivity analyses are undertaken by varying input pa-rameters (within a range, i.e., physically realistic) and ex-amining the model response. Sensitivity analyses can beuseful for a range of purposes including (a) testing therobustness of model resulting in the presence of uncertainty,(b) increasing the understanding of the relationships be-tween input and output variables in a model, (c) identifyingerrors in the model by encountering unexpected relation-ships between inputs and outputs, and (d) simplifyingmodels by identifying model inputs that have no e7ect onthe output, or identifying and removing redundant parts ofthe model structure. Sensitivity analyses can also help toreduce uncertainty by identifying the model inputs thatcause the greatest uncertainty in the output, therebyallowing adjustments to increase the robustness of themodel. Importantly, by making model results more un-derstandable, compelling, or persuasive, sensitivity analysescan enhance interactions between modellers and the endusers of modelling output. Sensitivity analyses are thereforea vital part of evaluating if a model is .t for purpose, andtime must be set aside in any modelling study to undertakea credible model sensitivity study.
One area of sensitivity analysis that requires specialconsideration concerns the sensitivity of a given model toerrors in the input data (e.g., bathymetry, water level, anddepth-mean current speed). *is is especially importantwhen there are errors and/or uncertainty in more than oneinput data set which can result in compounded errors in themodel output. For example, in an estuarine sediment
transport model, errors in the water depth and/or currentspeed at a given location will result in an over- or un-derestimation of the bed shear stress. Since sedimenttransport is related to a power of the bed shear stress(typically quadratic for bed load and cubic for suspendedload), small errors in predicted bed shear stress can result inlarge errors in predicted gross and net sediment transport.
4.3. Time Series and Statistical Output. In many cases, thepresentation of data in time-series format helps to reveal thegoodness of .t between model and observation data, withgaps between observed and predicted data indicating vi-sually discrepancies between the model predictions and thecalibration data. Calibration should aim to minimise thesediscrepancies, and statistical analysis should be used toquantify the goodness of .t. Additionally, it is also in-formative to compare like-with-like values using a scatterplot showing observed versus modelled values. Some ex-amples are provided below.
To quantify the temporal aspect of the model calibrationfurther, statistical approaches are used to demonstrate thatcon.dence can be placed in the model performance overtemporal time scales in a clear and understandable way. *eDanish Hydraulics Institute, DHI, Quality Indices Matrixcalculating several goodness-of-.t statistics for comparisonbetween observations and simulated results is an appropriatemethodology to adopt. When necessary, and when dataquality permits, additional types of analysis may be ap-propriate, such as Brier skill score analysis [38] or indices ofagreement (e.g., [39]).
Simple statistics that demonstrate the level of agreementbetween measured/observed data and model prediction ata chosen location in themodel domain include themean andpeak di7erences (often expressed as a percentage) and thestandard deviation. In addition, there are several qualityindices that can be used to demonstrate the statisticalagreement between model predictions and observations(Table 4). In the table, Oi and Si are the measured andpredicted values of a given parameter at time ti, respectively,and Ni is the total number of data points. *e statistics arenow de.ned.
Accuracy expresses the di7erence between the measuredand modelled data which is de.ned as dif i � Si −Oi. In allcases, the aim should be to reduce the value of difi to thesmallest value practicable. Ideally, a minimum difi shouldnot exceed 10%, although this will be highly variabledepending on the parameter being considered and the ac-curacy of the calibration data used in the model. *e ac-curacy of the modelled data can also be quanti.ed using theroot mean square error (RMSE) statistic (Table 4). *eRMSE value is often expressed as a percentage, where lowervalues indicate less residual variance and thus better modelperformance.
*e bias expresses the di7erence between an estimator’sexpectation and the true value of the parameter being esti-mated and can be de.ned as being equal to the mean error inthe data. Systematic bias re6ects external in6uences that maya7ect the accuracy of statistical measurements. Detection bias
8 Advances in Civil Engineering

is where a phenomenon is more likely to be observed and/orreported for a set of study subjects. Reporting bias involvesa skew in the availability of data, such that observations ofa certain kind may be more likely to be reported and con-sequently used in research.
�e agreement or otherwise betweenmeasured/observeddata and model prediction time series is frequently quan-ti�ed using the Pearson product-moment coe�cient, R(Table 4). It is essential to test the statistical signi�cance ofthe correlation coe�cient. In most cases, the Pearsonmethod (one- or two-tailed) is appropriate. In statisticalsigni�cance testing, if the null hypothesis is true, the p valueis the probability of obtaining a test statistic at least asextreme as the one that was observed. One often “rejects thenull hypothesis” when the p value is less than 0.05 or 0.01,corresponding, respectively, to a 5% or 1% chance ofrejecting the null hypothesis when it is true. When the nullhypothesis is rejected, the result is said to be statisticallysigni�cant. In estuarine and shelf sea modelling studies,statistical signi�cance at around the 95% con�dence level isjudged to be acceptable for most practical applications.
A range of statistical indices of model performance hasbeen developed (e.g., [40–43]). �e widely used Brier skillscore, BSS [38], and Willmott’s dimensionless index ofagreement [44] compare themean square di�erence betweenthe prediction and observation with the mean square dif-ference between baseline prediction and observation. Forexample, perfect agreement gives a BSS score of 1, andnegative values indicate that predictions are worse thanthe baseline value. van Rijn et al. [45] provides an inter-pretation of BSS values where 0<BSS< 0.3, 0.3<BSS< 0.6,0.6<BSS< 0.8, and BBB> 8 indicated poor, reasonable/fair,good, and excellent, respectively. However, it has beenrecognised that the larger errors, when squared, overweightthe in�uence of those errors on the sum of squared errors.�is issue has recently been addressed byWillmott et al. [46]
who present a nontrivial improvement to the earlier index ofagreement recommended for a wide range of model per-formance applications. Examples of model skill assessmentsfor estuarine models are given by Sheng and Kim [47] andWarner et al. [48].
�e scatter index, SI, is the RMSE normalised with themean value. In most cases, the scatter index provides a usefulindication of the model performance. However, taking wavemodel results as an example, the scatter index may appear tounderstate the skill of the model, as it tends to be large inshelf sea applications. �e reason is that the RMSE of thesigni�cant wave height is normalised with the average sig-ni�cant wave height, which is usually rather small in shelf searegions. For example, an RMSE of 0.25m in the signi�cantwave height in complex �eld conditions seems reasonable,but if the mean value is only 0.5m, the scatter index attainsthe rather high value of 50%. �e diagnostic model per-formance indexMPI indicates the degree to which themodelreproduces the observed changes of the waves. Like thescatter index, it is de�ned in terms of RMSE values in theform MPI� 1− (RMSE/RMSC). Here, the de�nition ofRMSC is identical to that of RMSE, except that all Si valuesare replaced by the incident Oi values. For a perfect model(RMSE� 0), the value of the MPI would obviously be 1,whereas it would be 0 for a model that (erroneously) predictsno changes (RMSE�RMSC) (cf. [49]).
5. Hydrodynamic Models
5.1. Data Sources. Water-level gauges and pressure sensorstypically provide information on the water level relative toa de�ned datum at a suitable temporal resolution (typically nomore than 30-minute intervals). Ideally, water level and currentinformation should be obtained from as many key locationswithin the model domain as possible, and speci�cally, in areasof interest and areas of signi�cant variation. Typically, errors
Table 4: Example statistics to demonstrate the level of agreement between measured/observed data and model prediction.
Quality index Example Formulae
Accuracy Root mean square error RMSE ���������������1Ni∑
Nii�1 (Si −Oi)
2√
Bias Average bias Bias � ∑Ni
i�11Ni(Si −Oi)
2
CorrelationPearson product-moment coe�cient:
Oi � 1Ni∑Ni
i�1Oi and Si � 1
Ni∑Ni
i�1Si
R � ∑Nii�1 (Si − Si)(Oi −Oi)���������
∑Nii�1 (Si − Si)
2√ ���������
∑Nii�1 (Oi −Oi)
2√
Skill
Brier skill score (BSS): Xp is the postevent conditionpredicted by the model, Xm is the measured postevent
condition, and Xb is the preevent condition.Skill: index of agreement [44], whereX andX are timeseries and time average of model and observed values
BSS � %〈∣∣∣∣Xp −Xm
∣∣∣∣2%〉%〈|Xb −Xm|2%〉[ ]
Skill � 1− ∑|Xmod −Xobs|2∑(|Xmod −Xobs|+|Xobs −Xobs|)2
Agreement Scatter index SI ������������1Ni∑
Nii�1 (Si −Oi)
2√
1Ni∑
Nii�1 Oi
× 100
Advances in Civil Engineering 9

associated with these kinds of data include (a) incorrect timereferences (e.g., GMT/BST), (b) errors in datum corrections(see below), (c) errors in correctly de.ning the measured datalocations in the model domain, and (d) instrument calibrationerror. Problemswith themeasuring device often appear as o7setsand/or spikes in the measured data. Spikes should be eitherremoved or substituted with arti.cial data. Interpolation overlarge gaps in the data should not be attempted, and alternativedata sources with better temporal cover should be sought.
To de.ne the con.dence limits of the measured data,a quality review is required. *is may result in the rejectionof some data, or the adoption of other data with statedcaveats. *e more data that are available (depending onquality, format, and spatial and temporal resolution), themore reliable the model calibration is likely to be. Tominimise potential uncertainties in model performance andto optimise model calibration, common misunderstandingsand typical errors and uncertainties in hydrodynamic modelinput data are described below along with some suggestedapproaches which can aid model setup and calibration.
5.2. Performance Guidelines
5.2.1. Water Level. A model calibration for water levelshould include examination of amplitude, phase, andasymmetry. Speci.cally, the test should look at (a) di7er-ences in maximum and minimum surface elevations; dif-ferences in tidal phase, at high and low water; and RMSE(noting that this is not corrected for bias, and unless the biasis insigni.cant, this parameter can be di9cult to interpret),(b) bias, and (c) scatter index (SI). It is recommended thatthe minimum-level model performance required for shelfsea areas is (a) water levels to within ±0.10m (or to within10% and 15% of spring and neap tidal ranges, resp.) and (b)timing of high water to within ±15 minutes. For estuaries, itis recommended that the minimum-level model perfor-mance required is (a) water levels to within ±0.10m at themouth, ±0.30m at the head (or to within 10% and 15% ofspring and neap tidal ranges, resp.) and (b) timing of highwater at the mouth to within ±15min, ±25min at the head.
5.2.2. Current Speed. In 2D depth-average hydrodynamicmodels, current speed predictions should be examined withrespect to amplitude, phase, direction, and asymmetry. Spe-ci.cally, the test should look at (a) di7erences in peak 6owspeeds (ebb and 6ood tides), (b) mean 6ow direction, (c)RMSE, (d) bias, and (e) SI. However, appropriate depth-average current speed values must normally be derived fromeither point measurements at some reference height in thewater column or measured vertical current pro.le data (e.g.,ADCP data). In both cases, depth-average current speed can becalculated using the 1/7 power law (e.g., [50], p. 49) or similar.Normally for 3D hydrodynamic models, ADCP data can beused directly for calibration at one or more levels in the model.However, if the model layers are large in vertical extent, theymay span one of more ADCP measurement bins, and the 1/7power law or similar must be applied to interpolate an ap-propriate current speed value for the model layer.
It is recommended here that predicted current speedsfrom 2D and 3D hydrodynamic models in shelf sea areas andestuaries be less than ±0.20m/s (or ±10% to 20%) of themeasured speed. To express the accuracy of tidal currentspeed predictions by models, Cefas (www.cefas.defra.gov.uk/media/.../report-on-.rst-asmo-workshop.pdf, accessedMarch 2014) expresses performance in terms of error in themaximum predicted velocity so that errors of< 0.05m/s,< 0.1m/s, < 0.2m/s, and > 0.2m/s express very good, good,moderate, and poor performance, respectively.
Results from statistical analyses of model performance needto be interpreted with care. *e RMSE value provides a quan-titative measure of how good the model .ts the data based onthe mean of the data. However, if there is signi.cant bias in thedata, then the goodness of this .t is not an appropriate statisticto use. It is recommended here that bias<0.2, SI<0.5, andRMSE<0.2 demonstrate a statistically signi.cant .t.
5.2.3. Current Direction. Since current direction is derivedfrom vector quantities, it cannot be treated in the same way asother parameters (e.g., speed). However, the accuracy of pre-dicted current direction can be examined using time-series plotsand quanti.ed, for example, using bias and SI statistics. Toremove ambiguity from current direction data, the followingsteps are recommended: (a) detect whether the absolute dif-ference between the directions is greater than 180°; (b) if it isgreater than 180°, then add 360° to the lesser direction beforesubtracting the greater direction; or (c) if it is less than 180°, thencalculate the absolute di7erence between the directions. *ismethod returns an absolute (positive) value describing the dif-ference in directions which will be always less than 180°. Forpractical applications, it is suggested that preserving the sign(negative or positive) of the direction di7erence is not necessary,and it prevents a meaningful mean bias to be calculated fromthose di7erences. Once the absolute di7erence between the di-rections has been calculated, it is possible to calculate the bias. Forshelf sea areas and estuaries, the minimum-level model per-formance is recommended here to be±10° and±15°, respectively.
5.2.4. Bed Shear Stress. Except for some specialist researchinstruments, for example, a .eld-deployable shear plateprototype reported by Oebius [51] and laboratory-basedshear plates reported by Grass et al. [52] and Rankin andHires [53], no reliable direct way of measuring the bed shearstress is yet available. For most practical applications, the useof measurements to calibrate/validate bed shear stress valuespredicted by a model is therefore not possible.
When considering bed shear stress in the context ofhydrodynamic and/or sediment transport, it is criticallyimportant to distinguish between the skin friction compo-nent of total bed shear stress responsible for sedimentmobilisation and transport and the form drag imposed onthe 6ow by pressure losses in the wake of bed obstacles suchas bedforms. Most models predict the total bed shear stressusing the quadratic stress law. *is relates a depth-average6ow speed to stress via a drag coe9cient that characterisesthe hydrodynamic “roughness” of the bed. For skin frictionbed shear stress, the roughness parameter expresses the drag
10 Advances in Civil Engineering

attributable only to sediment grains. Form drag (in part re-sponsible for maintaining suspended sediment status) is thenobtained through a partitioning approach. It is very importantto understand how a model deals with drag partitioning and touse any resulting estimate of bed shear stress correctly. Soulsby[50] provides a clear account of bed shear stress componentsand their calculation and application.
When dealing with subgrid-scale bedforms, it is normal toparameterise bed roughness using a friction coe�cient or anequivalent grain roughness. �is can vary spatially (and insome cases temporally) and provides ameans ofmoderating orenhancing the local bed shear stress and thereby “tune” themodel against observational �ow data. �is needs to be un-dertaken with care to avoid implementation of unrealisticfriction coe�cient values, and guidance on appropriate frictioncoe�cients should be sought (e.g., software Guides for themodel being used; Soulsby [50]). To avoid signi�cant over- orunderestimation of sediment transport, it is recommendedthat bed shear stress requires estimation to within ±0.05N/m2
for shelf sea and estuarine models. However, small errors inbed shear stress can be compounded over time, especially inmorphological models. It is also noted that bed shear stressdata can be usefully postprocessed to obtain estimates ofbedforms and bed load and suspended transport using a rangeof empirical formulae [50]. However, these estimates areconstrained by the data used to generate them and the accuracyof the algorithms used to estimate hydrodynamic stresses.
A simple illustration of a depth-average hydrodynamicmodel calibration using bed roughness is shown in Figure 4.Figure 4(a) shows time series of measured and predictedcurrent speed at locations P1 and P2 in the mouth of a smalltidal inlet. In this initial model run, a drag coe�cient, Cd,value of 0.035 is assumed, leading to an underestimation ofthe current speed by the model. Reference to available bedsediment data suggests that a Cd value of 0.02 is more ap-propriate resulting in much better agreement between themeasured and predicted current speed values (Figure 4(b)).However, it is also noted recently that erosion had occurredin the inlet since the last bathymetric survey. Iterative ad-justments to the water depth in a subsequent series of modelruns �nally resulted in very good agreement between themeasured and predicted current speed (Figure 4(c)). �elowering of the bed of the inlet channel by 0.45m wassubsequently con�rmed by a repeat bathymetric surveyundertaken after the modelling was completed.
As a further example of calibration targets to achieve,required hydrodynamic model performance statistics forestuarine �ooding models from Defra/EA [3] are shown inTable 5. �e statistics include RMSE for storm surge ele-vation (hsurge), RMSE for high water levels (hmax), the tol-erances for predicted peak water levels, RMSE for �owvelocity (U), the tolerances for predicted �uvial inputs (Q),the �ood area required to be predicted correctly for two ormore historical �oods (A), and the predicted �ood deptherror (derr). While these statistical tests are speci�c to the�ooding application and are exacting since �ood predictionsmust be accurate, they are typical of the model performancecriteria that should be used for all shelf sea and estuarinemodels.
6. Wave Models
6.1. Data Sources. Typically, there are four sources of dataavailable for use in wave model calibration: visual obser-vations; buoys and platforms; satellites; and numericalmodels driven by surface wind �elds. Each has a di�erentlevel of con�dence and uncertainty, and good accounts ofwave measurement and data are given by Steele et al. [54],
0
0.5
1.0
1.5
2.0
2.5
P1
M1, Cd = 0.035P2
M2, Cd = 0.035
Curr
ent s
peed
(m/s
)
0 1 2 3 4 5 6Time (hours)
(a)
0
0.5
1.0
1.5
2.0
2.5
Curr
ent s
peed
(m/s
)
P1
M1, Cd = 0.02P2
M2, Cd = 0.02
0 1 2 3 4 5 6Time (hours)
(b)
Curr
ent s
peed
(m/s
)
0
0.5
1.0
1.5
2.0
2.5
P1
M1, Cd = 0.035,h +0.45 m
P2
M2, Cd = 0.035,h +0.45 m
0 1 2 3 4 5 6Time (hours)
(c)
Figure 4: Simple examples of a hydrodynamic model calibration:(a) measured (P1 and P2) and predicted (M1 andM2) water levels attwo locations with Cd set to 0.0035 in the model; (b) the sameplot as (a) with Cd � 0.002; and (c) the same plot as (a) with thebathymetry corrected by +0.45m.
Advances in Civil Engineering 11

Komen et al. [55], Krogstad et al. [56, 57], and Lindroth andLeijon [58].
6.1.1. Visual Observations. Visual observations of waveparameters (height, period, and direction) taken from shipsof opportunity are sometimes available for long periods(decades). *is data source has clear limitations and manypotential errors, particularly in stormy weather (cf. [59]).Other signi.cant limitations include the number of obser-vations and extent of data coverage which is typically limitedto shipping lanes. However, in the past, there are many areasof the world where wave measurements by other means areabsent and visual observations may be the only source ofinformation.
6.1.2. Buoy and Platforms. Surface-following buoys are themost common instrument used to measure waves, withdeployment depths between 10m and a few hundred metres(cf. [56, 57, 60]). *ere is a large variation in the quality ofthe data available from these devices depending on their ageand type. Typically, the latest devices can capture an estimateof the main wave parameters (signi.cant wave height, Hs,mean and peak period, Tm and Tp, and the related directionalinformation such as mean direction, mean directionalspread, kurtosis, and skewness for the full 2D spectrum).Typically, the measurements are taken at 1-hour intervals.Wave-measuring buoys are accurate instruments, and therelated error forHs is usually only a few percent. Uncertaintyoccurs due to sampling variability and resolution of thefrequency distribution (peak periods). In the high Hs range,the buoys tend to “slip” around the highest crests. In doingso, this introduces a negative bias in estimation of the higherwave height values.
6.1.3. Remote Sensing. Satellite altimeter and scatterometerdata are now available from a range of platforms (e.g., ERS2,ASCAT METOP-A, Krogstad and Barstow [61]). *e al-timeter provides information on wind speed and waveheight, and the scatterometer provides a wider band ofinformation on wave and wind parameters. However, inareas of complex geometry (typically shelf sea and estuarineareas), satellite data usually provide a poor estimate of seastate due to the strong spatial gradients which cannot be wellresolved by the satellite sensors. Other limitations includepoor temporal coverage due to satellite overpass frequencywhich can prevent acquisition of high-frequency time series
for a chosen location. However, developments reported byYoung et al. [62] demonstrate clearly that useful global wavedata sets can now be assembled using data from a range ofremote sensing platforms and that these data have highutility in regions of the world where wave data are scarce.Wave data can also be obtained using HF (e.g., [63]) andX-band (e.g., [64]) radar systems and through the use ofvideo (cf. Argus Video [65]). Although these approachesrequire some calibration, each has a capability of measuringnearshore waves and can help calibrate and validate wavemodels in complex regions where re6ection, refraction, anddi7usion processes may be present.
6.2. Performance Guidelines. Typically, for waves, the re-quired model performance at the calibration and validationstage is judged to be acceptable if the wave model outputs arebiased to within (a) ±10% of the mean observed height, (b)±20% of the mean observed period, and (c) ±15° of the meanobserved direction. Considering design, appraisal, andstrategy applications, Table 6 provides practical wave modelperformance guidelines concerned with model resolution,minimum record (or hindcast) lengths required to de.neextreme wave statistics, and RMSE values for Hm0 and av-erage peak Hm0 [3].
*ese wave model performance statistics are intendedonly a guide, and often more stringent agreement betweenobserved and modelled data may be required. Equally, thesecriteria might be too exacting for all regions of the modelledarea. Meeting these criteria for at least 90% of positions/timecombinations is likely to be a less stringent and acceptablecriterion in most circumstances. In cases where waves frommore than one direction are present simultaneously (e.g.,swell and wind sea), mean wave direction is meaningless andreference must be made to the directional wave spectra tocharacterise the observed and modelled wave .eld. Scatterplots and correlation statistics are also useful to demonstrateagreement between measured and modelled wave directionfor multidirectional sea states. It is also helpful in somecircumstances to examine directional wave spreading sincemany third-generation spectral wave models tend to un-derestimate this parameter (cf. [66, 67]).
Examples of useful plots that help assess wave modelperformance are shown in Figure 5 which shows measuredHs, Tp, and direction data from the SWAN model [68] andmeasured values from a Directional Waverider buoy. Goodagreement between the model and the observations isdemonstrated. Figure 6(a) shows a scatter diagram of
Table 5: Model performance statistics for 6ood studies in estuaries including storm surge elevation (hsurge), high water levels (hmax),predicted peak water levels, 6ow velocity (U), predicted 6uvial inputs (Q), 6ood area predicted correctly for two or more historical 6oods(A), and predicted 6ood depth error (derr) (A � design; B � appraisal; C � strategy; and U � unsatisfactory); from Defra/EA [3].
Type RMSEforhsurge (m) RMSEforhmax (m) Predictedpeakwater level (mm) RMSEforU (m/s) Q (%ofmeasured6ows) A (%) derr (m)A <0.20 <0.20 ±150 ≤0.1 ±5 >95 ≤0.10B 0.20 to 0.35 0.20 to 0.25 ±250 ≤0.2 ±10 >90 ≤0.20C 0.35 to 0.50 <0.30 ±350 ≤0.3 ±15 >80 ≤0.30U >0.50 >0.30 >350 >0.3 >15 <80 >0.30
12 Advances in Civil Engineering

measured and modelled Hs. Here, the line of unity indicatesthat the model slightly overestimates Hs. In Figure 6(b),a peak over threshold (POT) analysis for modelled andmeasured Hs data is shown. �ese diagrams both helpidentify agreement or otherwise between measured andmodelled wave data, and it is recommended that these visualchecks are used when evaluating wave predictions.
In the case of spectral wave models, it is also helpful toexamine the frequency domain di�erences in the energydistribution between model and measured spectra.�e sameapproach applies to directional wave spectra, noting how-ever, that it is unusual to have measured wave spectra frommore than one location in the model domain.
7. Sediment Models
Accurately simulating the behaviour of sediments in nu-merical models presents one of the greatest challenges. �eprincipal aim of sediment models is to reproduce the ob-served spatial and temporal variations in observed erosionand accretion. Here, guidance is provided for the cali-bration of numerical models for sand (sediment coarserthan sand (e.g., shingle) cannot be represented reliablythrough 2-dimensional modelling) (median grain di-ameter,D50> 63 µm) and silt/mud (D50< 63 µm). Attentionis �rst given to the essential data required to successfullycalibrate sediment models of estuaries and open shelf sea
environments. �e methods used to measure bed load,suspended load, and net sediment transport are reviewedbrie�y, drawing attention to potential errors and un-certainties that must be considered in the model calibrationprocess [69]. �e issues associated with the calibration ofcohesive, noncohesive, and mixed grain-size sedimentmodels are then discussed.
It is emphasised from the outset that a primary re-quirement of all sediment modelling is accurate informationabout the physical properties of the sediment (grain-sizedistribution, bulk density, porosity, etc.), bedforms (activeand moribund), and the spatial distribution and thickness ofthe sediments. Also, sight should not be lost of the fact thatalthough the physical characteristics of sediments may bewell expressed, biological mediation and the behaviour ofsome cohesive sediment remain di�cult to parameterise inmodels [70], and although some of these problems can beovercome using in situ measurements (e.g., �eld �umes[71]), these are costly to deploy and are not normally un-dertaken in practice.
7.1. Data Sources. Obtaining suitable data of su�cientquality for the calibration of a sediment model is a widelyrecognised challenge [72]. In addition to sediment dataobtained directly from in situ water and bed samples (grabs),typically, there are two primary types of data which are
Table 6: Model performance statistics for wave models (A � design; B � appraisal; C � strategy; and U � unsatisfactory); from Defra/EA [3].
Type Model resolution (km) Record length (years) RMSE,Hm0 (m) RMSE average peak,Hm0 (m)A ≤12 ≥30 ≤0.4 ≤0.10B ≤12 ≥20 ≤0.5 ≤0.12C ≤12 ≥10 ≤0.6 ≤0.15U >12 <10 >0.6 >0.15
0
1
2
3
05
10152025
0 10 20 30 40 50 60 70 8050
100
150
200
Time (hours)
Dire
ctio
n (d
eg.)
Tp (s
)Hs (
m)
Waverider buoySWAN model
Figure 5: Comparisons between measured and predicted wave time series showing Hs, Tp, and direction.
Advances in Civil Engineering 13

required for the calibration of sediment models: (a) mea-surements of the sediment transport �ux (bed load andsuspended load) over time scales of a few tidal cycles and (b)measurements of bed-level changes attributable to localerosion and accretion to provide information on net sedi-ment transport over a period of weeks and months. Acomprehensive review of instrumentation used to measuresediment transport is given by Williams [73].
7.1.1. Measuring Bed Load and Bedforms. In estuaries andshelf sea environments, bed load is the dominant mode ofsediment transport for sand. Sediment traps, frequently usedto measure bed load in rivers, have been deployed in es-tuarine and shelf sea environments with mixed success (cf.[74]). �e Arnhem, Helley–Smith, and Delft Nile samplersare the most commonly used devices owing to their ro-bustness and ease of handling in the �eld. However, theiraccuracy depends on the number of samples collected whichmay be restricted by high analysis costs.
As an alternative to traps, bed load is sometimes esti-mated using �uorescent tracers (e.g., [32]) and less fre-quently using magnetic tracers (e.g., [75]). �e method
involves deploying a quantity of a material at a known lo-cation and subsequent sampling campaigns on a grid ofsample positions to determine the dispersion of the material.Both approaches use materials with the same dynamic be-haviour as the natural sediments and with su�ciently dis-tinct characteristics to make it easily detectable in verylow concentrations (http://www.partrac.com/ (accessed on1 August 2014)). Sediment tracing techniques have values instudies examining the sediment �ux and have been usede�ectively to study dredging impacts and disruptions tosediment supply attributable to structures. A comprehensivereview of tracing techniques and options is given by Blacket al. [76].
Passive acoustic techniques using hydrophones to recordthe sediment-generated noise, SGN, arising during bed loadtransport of coarse sediments have been used (e.g., [77]) butto be e�ective, they require objective calibration which canbe very costly. However, improvements to processingsoftware and computing power now allow automatedanalysis of video images to detect particle displacements atsubsecond temporal resolution for the entire �eld of viewand the visual analysis of bed load images in providing usefuldata. Attempts to quantify bed load have also exploited thebottom tracking feature of ADCPs in combination withconventional pressure di�erence samplers. Together, theseinstruments can be used to determine the bed load transportvelocity and bed load transport rate, respectively (e.g., [78,79]). Rates of bed load transport have also been inferred fromrates of bed form migration measured using rotary sonardevices (e.g., [80, 81]). At a much larger scale, remote sensingtechniques have been applied to link large bedform migra-tions with bed load sediment transport rates (e.g., [82]).
7.1.2. Measuring Suspended Load. Only very �ne sand, silt,and mud are transported in suspension in estuarine andshelf sea environments. In the simplest approach used toquantify the suspended load, water samples are collected insitu to determine the concentration of suspended particulatematter (SPM) and the grain-size distribution either at thesurface or at a speci�ed depth in the water column using, forexample, triggered water bottles or pump sampling (cf. [83,84]). Samples can be collected either at discrete times or atset times throughout a tidal cycle. �ere is a low-to-moderate level of certainty in the resultant SPM dataowing to potential errors in the way the water samples arecollected, the short temporal sampling period, and thepresence of varying quantities of organic particles. �edeployment of colocated current meters enables the sedi-ment �ux to be determined, which in turn can provide usefulinformation on sediment resuspension and settling velocity.
Turbidity meters can provide continuous or discretemeasure of SPM concentrations by detecting the attenuationof light passing through the instrument’s sampling volume.�ey are best suited to suspensions of silt and clay-sizeparticles. Self-logging turbidity meters are capable of re-cording accurately turbidity at a single depth within thewater column for long periods [85]. Turbidity data are alsoobtained using a CTD probe (conductivity, temperature, and
0 0.5 1.0 1.5 2.00
0.5
1.0
1.5
2.0
Hs (measured, m)
Hs (
mod
elle
d, m
)
Unity
(a)
0.01 0.1 1.0 10 100
2
4
6
8
10
Return period (years)
Peak
ove
r thr
esho
ld H
s
ModelledMeasured
(b)
Figure 6: (a) Scatter diagram showing the relationship betweenmeasured and modelled Hs and (b) a peak over threshold (POT)analysis of Hs between modelled and measured wave data.
14 Advances in Civil Engineering

depth) equipped with a turbidity sensor. In estuaries andshelf sea locations, CTDs are normally lowered and raisedthrough the water column for a period of 12.5 hours toprovide information on the temporal changes in the SSCpro.le during a tidal cycle. However, there is the potentialfor the sensors to become fouled over time giving erroneousdata, especially if the sensor becomes exposed during lowwater and the optical systems are compromised by sedimentand/or biological .lms, leading to unrealistically high tur-bidity values. In addition, the gain setting (sensitivity of theinstrument) must be correctly adjusted to accommodate therange of SPM concentrations in the area. For example,turbidity measurements could reach the upper limit of theinstrument if the gain setting is too low or barely registerturbidity if the gain setting is too high. *is problem can beovercome using an instrument with a logarithmic responsewhich allows measurements of SPM spanning several ordersof magnitude. Although overcoming the problems associ-ated with saturation and aliasing, the overall instrumentprecision is reduced as a result.
Optical turbidity instruments are calibrated using pri-mary solutions such as formazin, and turbidity is expressedin formazin turbidity units (FTU) or nephelometric tur-bidity units (NTU). *e main problem with this approacharises when conversions are made between FTU (or NTU)and in situ water samples where di7erences can be as large as±200% [86]. Furthermore, the material in suspensionmay bea complex mixture of organic and inorganic particles whichadds further complexity to the conversion between FTU andSSC. Calibration is therefore required to get the concen-tration of SPM into meaningful units for sediment mod-elling purposes (e.g., mg/l). *is can be achieved either bycollecting water samples at speci.c times to calibrate themeasurements or by calibrating the instrument in laboratoryconditions for a range of concentrations before and afterdeployment. It is important that calibration is performedover an applicable range of SPM concentration values.However, there are additional problems attributable to6occulation when measuring muddy sediments. In thesecases, water sampling can destroy the delicate structures, andchanges in temperature/salinity can enhance or reduce6occulation potential. Both factors can lead to errors, andthus, these kinds of data must be treated with caution in thecontext of model calibration [87].
Optical backscatter sensors (OBSs) measure turbidityand suspended solids concentrations by detecting infraredlight scattered from SPM (cf. [88, 89]). OBS instruments arebest suited to suspensions of silt and clay-size particles. *eresponse of the OBS sensors strongly depends on the size,composition, and shape of the suspended particles, andcalibration like that used for turbidity sensors is required toobtain SPM concentration data. OBS instruments are subjectto the same problems with biofouling and other opticalcontamination as turbidity sensors (e.g., [90]). SSC pro.lescan be obtained using vertical arrays of OBS. Further in-formation is given by, for example, Kineke and Sternberg[91], Hoitink and Hoekstra [92], and Boss et al. [93].
Aerial and satellite remote sensing imagery can be usedin some circumstances to indicate the advection rate and
direction of suspended sediment plumes in the surface andnear-surface layers of the water column. Remote sensingalgorithms have been widely used to extract information onsuspended sediment concentrations from multispectralsensor data (e.g., [94, 95]).
For sand-size particles, the use of multiple-frequencyacoustic backscatter (ABS) to measure the concentration ofsuspended sediment is becoming more widespread. In-version techniques can be applied to obtain suspendedsediment concentration (SSC) pro.les directly (e.g., [96]),and information about the grain size in suspension can alsobe extracted (e.g., [97]). Typically, these instruments mea-sure SSC at intervals of 1 cm up to a fewmetres above the bedwhere the bulk of suspended sediment is present. SSCpro.les can also be derived from ADCP data, albeit with lessspatial resolution, using a similar acoustic inversion tech-nique (e.g., [98]). While one or more samples are requiredfor calibration and measurements are spatially averaged, theinstrument can provide useful SSC pro.le information overextended periods.
7.1.3. Estimations of Net Sediment Transport. In manymodelling studies, the required outcome concerns theprediction of net sediment transport over periods of days,weeks, or months. *ere are several useful data that canassist the model calibration process for this aim. In areaswhere frequent (e.g., annual) maintenance dredging is un-dertaken, information is likely to be available to describe thefrequency and volumes of sediment removed. *ese datacan be used to de.ne changes in bed levels (e.g., accretionamounts and rates over known periods), and throughcomparisons between predicted accretion rates and ratesderived from dredging data, it may be possible to calibratea sediment model, albeit with limited accuracy (e.g., [99]). Inaddition, dredging volume data can also be used to providean indication of the interannual variability of accretion andguide the modelling process. However, owing to sedimentloss during the dredging activities and to uncertainty aboutthe bulk density of the material removed, these measure-ments may not be as accurate as might be desired and shouldonly be used to provide an indication of the volumes ofsediment accreting in the area. It is not possible to attributeaccretion to a mode of transport, and thus, sediment for-mulae that predict total sediment transport must be used.
Several acoustic systems have been developed to imagethe bed at a large scale including echo sounding devices andside-scan and multibeam sonar (e.g., [100–102]). *ese datacan be used to determine net sediment budgets andtransport pathways and assist model calibration (e.g., [103,104]). Repeat subtidal bathymetric surveys can providevaluable information on bedform mobility from which netsediment responses can be determined (e.g., [105]). At thescale of estuaries, Mason et al. [77] illustrate how areas andvolumes of sediment accretion and erosion can be estimatedusing the waterline method employing remote sensing andhydrodynamic modelling. Recent advances in LiDARnow make it possible to penetrate water to depths exceeding10m provided water clarity is good enough and thus allow
Advances in Civil Engineering 15

subtidal survey opportunities (e.g., [106]). Monitoring oflarge-scale changes in morphology and/or bathymetry incoastal and estuarine environments brought about by sedi-ment mobilisation, transport, and accretion can also now bemeasured routinely with systems such as ARGUS (http://www.planetargus.com/ (accessed on 1 August 2014)) andX-band radar (http://www.oceanwaves.de/ (accessed on1 August 2014)) (e.g., [107]). Although remote sensing wouldnever be selected to generate a primary bathymetric data set,it has been used in situations where monitoring of rapidbathymetric changes may be required (e.g., following beachnourishments, breaching, etc). Bathymetric and topographicsurvey data are obtained at irregularly spaced locations. Tomake the data usable in a numericalmodel, it is necessary to usean interpolation routine to transform the data onto a grid ofregularly spaced data points. Care must be taken to select themost appropriate interpolationmethod as any error will impacton calculations of change in bathymetry and topography.
LiDAR data are especially useful for intertidal areas.Although spatial positioning is accurate (typically ±5 cm),the vertical accuracy is at best ±20 cm. Furthermore,standing water on the beach can result in spurious data, andsigni.cant postprocessing may be required. Although theuse of LiDAR to determine accurate accretion and erosionrates is not recommended, it does provide extensive (andrapid) spatial cover which may prove to be useful in severalapplications. In some instances, an assessment of changes inbeach topography might be enhanced through reference to.xed, identi.able structures (e.g., quay walls and engi-neering structures) which can be used to calibrate repeatsurveys.
7.2. Sediment Transport Models. Shelf sea and estuarinemodels normally provide output de.ning the predictedcumulative erosion/sedimentation for a stated bulk densitygiving the cumulative change in bed level over the modelperiod. Total sand transport is usually expressed as a netvalue over a speci.ed period, allowing transport vectors to beplotted which may be comparable with information directlyavailable from the literature.
A wide range of sediment transport formulae areavailable to predict bed load transport, suspended loadtransport, and total load transport of noncohesive and co-hesive sediments (e.g., [108]). All are derived to represent thebest .t to empirical data sets derived in the laboratory or insome cases from the .eld. *e sediment calibration dataavailable will determine the accuracy of the model and limithow much validation is possible. Typically, a sedimentmodel will be calibrated using SSC data, with validationutilising measured sedimentation rates (e.g., [109]). It isimportant to keep in mind that the sediment transportmodel is driven by modelled hydrodynamics and that highlynonlinear relationships exist between bed shear stress, 6owturbulence, and sediment mobilisation, transport, and ac-cretion. *us, any limitation with the initial hydrodynamiccalibration could impact signi.cantly on the sedimentmodel. It is therefore critically important to obtain the besthydrodynamic calibration possible.
When modelling sediment transport, it is important torecognise the heterogeneity of the seabed and the homo-geneity of most sediment transport models. It is thereforeessential that roughness maps previously described are usedto characterise as accurately as possible the physical prop-erties of the sediments (grain roughness) and the mor-phology of the bed (form drag). It should be rememberedwhen interpreting model outputs that, since sedimenttransport formulae are empirical and are based on a limitedamount of calibration data from laboratory and/or .eldstudies, the prediction of sediment responses to hydrody-namic forcing is at best limited to accuracy of no more thana factor of two ([110–112]).
7.2.1. Sediment Properties. As the physical and dynamicproperties of noncohesive sediments are less complex, theamount of information needed to setup and calibrate sandtransport models is less than that required for mud. In theabsence of measurements, the speci.c density, porosity, andbulk density for quartz sand are assumed to be 2650 kg/m3,0.45 kg/m3, and 1460 kg/m3, respectively. *e median graindiameter (D50) is normally measured using grain-size analysisof samples or published data (e.g., BGS (http://www.bgs.ac.uk/discoverymetadata/13605549.html)). While the spatialdistribution of sand-sized sediment and information on thedepth of any deposit is helpful, it is rarely available, leading toambiguity about sediment source limitations. Informationabout bedforms is available either from observations de-scribed above or generated through theoretical equationslinking bedform dimensions with the sediment grain size andthe hydrodynamic regime [50]. *e threshold bed shearstress, a critical parameter in sediment models de.ning thebed shear stress required to mobilise the sediments, is nor-mally calculated using a selected empirical formula (e.g., [50])and expressed as a Shields parameter.
For cohesive sediment transport models, the followingsediment data are normally required: sediment density;grain size; settling velocity; and the threshold bed shearstress for erosion and deposition. If this information cannotbe obtained from in situ measurements and/or analysis ofsamples, Whitehouse et al. [113] provide a good account offormulae for deriving some useful properties of cohesivesediments. It is common practice to measure “wet” sedimentdensity in situ using a density probe which can then beconverted to “dry” density (e.g., [113]). To obtain the correctdry density required by some models, it is recommendedthat the porosity factor is changed until the wet density is thesame as the measured density. Typically, porosity valuesbetween 0.75 and 0.98 should be applied for sedimentsconsolidated for less than 1 year and then 0.25 to 0.75 forlonger periods of consolidation.
Typical settling velocities for mud range from 0.003m/sto 0.0001m/s and can be calculated based on the grain size (ifknown) using empirical formulae (cf. [113]). However,caution must be exercised when using this approach due to6occulation, which can increase signi.cantly the size (andhence settling velocity) of particles in suspension.*ese mayalso incorporate organic matter in their matrix, thereby
16 Advances in Civil Engineering

a7ecting the density (and possibly reducing the settlingvelocity). Furthermore, sampling of suspended sediments insitu frequently destroys the 6ocs or alters signi.cantly theirphysical properties. *ere is no simple solution to thisproblem, and modelling assumptions and limitations mustbe stated clearly. Although knowledge of mineralogy, sa-linity, turbulent kinetic energy, and water temperaturemakes it possible to calculate the potential 6oc size, this isfurther complicated by temporal and spatial variations inthese parameters. It is also noted that many mud models usethe SSC as a parameter for de.ning the settling velocity, notgrain size.
*e critical bed shear stress for erosion, τcrit_E, can beestimated using the Mitchener et al. [114] formula whichaccounts for sediment density. Several methods to measureτcrit_E exist and comprise laboratory devices to analysesamples from the .eld and carousel 6umes for .eld de-ployment [71]. *ese can be very e7ective and allow in-vestigation of how τcrit_E changes as erosion of a givensample proceeds (normally increasing). As with most sed-iment dynamics, extreme care should be exercised whenattempting to parameterise physical properties and pro-cesses using empirical approaches. *e critical bed shearstress for deposition, τcrit_D, is frequently used as a calibra-tion parameter. However, it is highly dependent on thelocal conditions. Generally, values between 0.1N/m2 and0.3N/m2 provide e7ective calibration settings for mudmodels. It is important to note that the default value in somemodels may not be appropriate for a case (e.g., in Delft3D
τcrit_D� 1000N/m2 and must be changed prior to any modelruns). Examples to guide the use and calibration of cohesivesediment models are provided by van Kessel et al. [115] andCarniello et al. [116].
7.3. Performance Guidelines
7.3.1. Noncohesive and Cohesive Sediments: SuspendedSediments. Sediment model calibration success can beassessed visually by comparing measured and predictedaverage concentrations over a set period, typically a spring-neap cycle. Example time series of measured water level andmeasured and predicted SSC over a period of 8 days areshown in Figure 7. In this case, SSC is measured continu-ously using a turbidity instrument. A second example ofmodel output and SSC calibration data is shown in Figure 8.In this case, SSC data were obtained fromwater samples. BothFigures 7 and 8 demonstrate that the general pattern of SSC issimilar for the modelled and measured data. For most ap-plications, the aim should be to achieve a model calibration of±20% of the measured average concentrations. In areas wheretime series of SSC measurements are available from multiplesites, a calibration level of ±30% for average SSC atmost of thesites would be deemed as a good level of calibration. If thereare only discrete values of SSC from water samples (ora handheld turbidity probe), experience shows that calibra-tion of only ±40% is achievable since the discrete measure-ments are subject to higher levels of uncertainty.
−2.0
Elev
atio
n (m
)−1.0
0
1.0
2.0
Water level
0 2 4 6 8 10 12 14 16Time (days)
(a)
0 2 4 6 8 10 12 14 16Time (days)
400
0
600
200
800
SSC
(mg/
l)
Measured SSCModelled SSC
(b)
Figure 7: Time series of (a) measured water level and (b) SSC (continuous) and predicted SSC from a calibrated cohesive sediment model.
Advances in Civil Engineering 17

7.3.2. Noncohesive and Cohesive Sediments: Sedimentation.Provided su�cient good quality data are available, sedi-mentation rates provide one of the best means of validat-ing the longer-term performance of sediment models andprovide an integrated view of the net result of modelledsuspended sediments and bed load. Given the complexity ofsediment transport and the errors associated with mea-surements and empirical sediment transport formulae al-luded to above, it is normal practice to apply a scaling factorto the modelled sediment transport rates. In e�ect, this isa global correction factor to the sediment transport ratespredicted by the model that provides an e�ective means ofmatching the model predictions of sedimentation with theobservations.�e scaling factor has no physical meaning andsimply represents many complex physical processes notpresent within the model including, for example, biologicaland sediment consolidation factors which can signi�cantlyalter the physical properties of the sediment with respect tomobilisation and transport.
As a general rule, the scaling factor should be less than 5.Higher values indicate a more signi�cant issue with theaccuracy of the modelling, or with site-speci�c complexity,that may require a nonstandard approach. In such cases, themodel approximations cannot be relied upon to describesedimentation/accretion, and �eld monitoring is recom-mended to supplement the model de�ciencies.
Dredging data are frequently used as a measure of long-term sedimentation and are normally expressed as thevolume of sediment removed from an area per year. Al-though such data are useful, they are frequently complicatedby a poorly de�ned relationship between the dredged vol-ume and the rarely provided bulk density value which cangive rise to signi�cant errors. Recourse must be made toestimated bulk density values, and sensitivity analysesshould be used to quantify sedimentation for a plausiblerange of values. When validating a model using dredgingdata, the volume of sediment accumulation predicted by themodel (normally over a 15-day spring-neap cycle) wouldnormally be scaled to match as closely as possible themeasurements. In recognition of the many sources of errors
and uncertainty, a model predicting the dredged volumes towithin 50% of the measured rates is normally deemed to besatisfactory for most practical applications. For example, instudy of the Humber, the modelled sedimentation volumewas 2,180,000m3/yr, while the average volume of sedimentdredged was 1,830,000m3/yr, with the values ranging from790,000m3/yr to 3,915,000m3/yr over a 5-year period (MottMacDonald, per. com.).
8. Morphological Models
Morphological modelling in estuarine and coastal envi-ronments is challenging, and useful description of the rangeof approaches employed is provided by Roelvink [117]. �eprimary limitation to the accuracy of morphological modelsconcerns the length of time over which the model is run,with results from long runs (e.g., monthly–decadal) likely todeviate signi�cantly from reality [118, 119].
From the outset, it is very important to establisha conceptual understanding of sediment transport andhistorical morphological changes in each study area beforeattempting a morphological model. �is must draw togetherexisting evidence and provide a qualitative description of theprocess controls and how the morphology of the systemresponds to these drivers. For long-term assessments ofmorphology, this also requires consideration of climatechange factors. A conceptual understanding can provide thehypothesis (e.g., sources and sinks) with which to test theperformance of the model and to provide some guidance onexpected magnitudes and directions of sediment transportand the associated morphological changes.
�e largest constraint to calibrating morphologicalmodels is the availability of high-quality data sets that ad-equately describe the model parameters over a su�cientlength of time. In an assessment of data requirements bySplinter et al. [120], it was concluded that (a) calibration ofa seasonally dominated site required longer data sets but wasless sensitive to sampling interval and (b) calibration ofa storm-dominated site required shorter and more fre-quently sampled data sets. Most studies show that mor-phological calibrations that are based on short observationalrecords (i.e.,< one year) are not robust. To determine initialestimates of calibration coe�cients and to hindcast short-term (1–5 years) shoreline variability, Splinter et al. [120]recommend monthly monitoring programs for at least twoyears. For longer-term predictions of morphology, longerdata sets are required to improve the performance of themodels.
Morphodynamic models of shelf sea and estuarine en-vironments usually comprise a controlling programme thatinvokes sequentially subroutines predicting hydrodynamics(e.g., [68, 121, 122]), sediment transport (e.g., [123]), and bedlevel (via the sediment continuity equation). �ese are allthen linked via the well-established morphodynamic feed-back loop (e.g., [124, 125]). Examples of morphologicalmodels include (a) the deterministic process-based modelDelft3d-MOR (e.g., [126]), suitable for short-term mor-phology predictions, (b) ASMITA (e.g., [127]), a semi-empirical model using large process-based units which can
Water level
Measured SSCModelled SSC
0 12 24 36 48 60 72 84Time (hours)
400
0
600
200
800
SSC
(mg/
l)
Figure 8: Details of measured water level and SSC (intermittentsamples) and predicted SSC from a calibrated cohesive sedimentmodel.
18 Advances in Civil Engineering

iterate towards an equilibrium condition and predict large-scale changes in sediment balances (sediment budget) overmedium- to long-term periods, and (c) XBeach, a deter-ministic process-based model suitable for predicting mor-phological changes resulting from storm impacts (e.g., [128,129]). An example of outputs from an XBeach model setupto predict the impact of a shore-normal groyne is shown inFigure 9.
However, bed-level changes occur over long time scalescompared with the hydrodynamic forcing, and thus untilrecently, owing to computational limitations, shelf seamorphodynamicmodels have been unable to predict very farinto the future using traditional morphodynamic upscalingtechniques such as the “continuity correction” method. Toovercome this limitation, Lesser et al. [122] and Roelvink[130] have developed the morphological acceleration factor(MORFAC) concept to enable morphological predictions toextend over decadal (e.g., [131]) and centennial [132] timescales.
Whilst the certainty in predicting morphology cannot beproven, it may be possible to bound the uncertainty using
sensitivity analysis for key process drivers and to determinea range of possible outcomes. Where possible, a range ofdi7erent morphological modelling approaches should beapplied, and where there is general agreement betweenapproaches, then it may be possible to draw additionalcon.dence from the results using an ensemble of modeloutputs.
De.ning what is and what is not a good morphologicalmodel performance depends on the spatial and temporalscales considered. At a minimum: (a) the observed/measuredsedimentation-erosion patternsmust be broadly in agreementwith the model outputs; (b) contour plots of measured andcomputed sedimentation and erosion need to agree as closelyas practicable; (c) predicted volume changes over controlareas must agree as closely as practicable with soundings ordredging .gures; and (d) the shape, migration, and areachange of measured and computed cross sections are requiredto agree.
*e incomplete description of the physics un-derpinning morphological processes and an imperfectknowledge of the initial conditions and parameters willalways lead to increasing errors in the model predictionsand limit the ability of shelf sea and estuarine morpho-dynamic models to accurately predict the future true stateof the environment.
9. Improving Predictions and ReducingUncertainty
An alternative emerging approach to address the problemof model prediction uncertainties involves the applicationof data assimilation techniques. *ese techniques keepmodel parameters .xed and produce an updated modelstate that matches as closely as possible the true state bycombining observational data with model predictions. *isupdated model state is then used to initiate the next modelforecast. However, even if the initial system state can bedescribed 6awlessly, model parameters simplify thephysical processes and, by doing so, will result in thegrowth of prediction errors. At present, assimilationmethods being developed to improve morphologicalforecast reliability are producing encouraging results (e.g.,[133–137]). For example, ad hoc data assimilation schemesand techniques using more re.ned heuristic tuning ofmodel state variables are being used to improve the per-formance of suspended sediment transport models (e.g.,[138, 139]).
Two main types of uncertainty pervade morphologicalmodels: (a) scenario uncertainty stems from uncertaintyabout the nature of the future weather and weather events(magnitude and frequency) responsible for driving mor-phological change and (b) response uncertainty relates to theuncertainty in predicting how the morphological system willrespond to given forcing conditions. To reduce uncertaintyin morphological model predictions, the ensemble approachwidely adopted by a climate change scientist (e.g., [140]) mayprove to be helpful. *e ensemble modelling approach aimsto address uncertainty arising from two main sources: (a)incomplete description of the physical processes bringing
4
0
−4
−8
4
0
−4
−8
450
300
150
0
450
300
150
0
0.5
0
−0.5
0.5
0
−0.5
(a) (b)
(c) (d)
Bathymetry (depth in m) Erosion/accretion (m)
Alo
ngsh
ore d
istan
ce (m
)
Cross-shore distance (m)0 300150 0 300150
450
300
150
00 150 300
Alo
ngsh
ore d
istan
ce (m
)
Cross-shore distance (m)(e)
Figure 9: Examples of XBeach model output: (a) baseline ba-thymetry; (b) baseline erosion/accretion after 8 tidal cycles withoblique waves; (c) scheme starting bathymetry with a shore-normalgroyne; (d) scheme erosion/accretion after 8 tidal cycles withoblique waves; and (e) snapshot of tidal and wave-induced 6owsaround the groyne.
Advances in Civil Engineering 19

about morphological changes and (b) limited computingpower that constrains how accurately processes can be par-ameterised in models. For example, in models of estuaries orshelf sea systems, subgrid scale processes such as turbulencecan only be represented in a simple way. *ere are twopossible routes to take in ensemble modelling: (a) perturbed-physics studies investigate how model predictions are a7ectedby the choice of input parameters through running system-atically a single model with di7erent parameter values and (b)multimodel studies investigate how predictions di7er betweendi7erent models. *e e7ect of the initial conditions of themodel can also be tested using both approaches.
10. Summary and Conclusions
*e modelling guidance presented in the paper has drawn onpublished guidelines and on the extensive practical experienceof the authors and their colleagues using a range of model typesin modelling projects concerned with, for example, managedrealignment, environmental impact assessments for o7shorewind farms, tidal energy, coastal defences, dredging/disposalsites, beach and estuarine morphodynamics, barrages, andcooling water discharges. Statistical guidelines to establishcalibration standards for a minimum level of performance forcoastal and estuarine hydrodynamic and sediment models aresummarised in Table 7 and are based in part on the recom-mendations from Evans [1] and Bartlett [2].
While naturally these guidelines remain open to challengesfrom modellers requiring more exacting model performance,they have been found to deliver models with a good prognosticperformance across a broad range of metrics and recognise the
practical limitations imposed onmodel calibration processes bythe accuracy and the temporal and spatial resolutions of theavailable calibration data. *eir use in coastal and estuarinemodelling studies is therefore recommended.
Nomenclature
ADCP: Acoustic Doppler current pro.lerADV: Acoustic Doppler velocimeterAWAC: Acoustic waves and currentsBST: British Summer TimeCD: Chart datumCTD: Conductivity, temperature, and depthDHI: Danish hydraulics instituteDGPS: Di7erential global positioning systemDEM: Digital elevation modelD50: Median grain diameterD90: 90% .ner thanFTU: Formazin turbidity unitsGMT: Greenwich Mean TimeHAT: Highest astronomical tideHF: High frequencyhmax: Maximum wave heightHm0: Hs computed using spectral analysisHs: Signi.cant wave heightJONSWAP: Joint North Sea Wave ProjectLAR: Largest astronomical rangeLAT: Lowest astronomical tideLiDAR: Light detection and rangingMHWN: Mean high water of neap tidesMHWS: Mean high water of spring tides
Table 7: Statistical guidelines to establish calibration standards for a minimum level of performance for coastal and estuarine hydrodynamicand sediment models. *e table is based in part on the recommendations from Evans [1] and Bartlett [2].
Model predictions RMSE Bias R SIBathymetry ±2.5% of the mean water depth <0.10 >0.95 <10%
Water level (coast) ±0.1mor10%of themeasured level (spring tide);±15%(neap tide) <0.10 >0.95 <10%
Water level (estuary) ±0.1m(mouth);±0.3m(head)or 10%of themeasuredlevel (spring tide); ±15% (neap tide) <0.20 >0.95 <15%
Water-level phase (coast) ±15 minutes <0.20 >0.90 <20%Water-level phase (estuary) ±15 minutes (mouth); ±25 minutes (head) <0.25 >0.90 <20%Average current speed ±0.1m/s or ±10% to 20% of the measured speed <0.10 >0.95 <10%
Peak current speedWithin<0.05m/s (very good), <0.1m/s (good),<0.2m/s (moderate), and <0.3m/s (poor) of the
measured peak speed<0.15 >0.90 <15%
Current direction (coastal) ±10° of the measured direction <0.25 >0.90 <20%Current direction (estuary) ±15° of the measured direction <0.30 >0.90 <20%Bed shear stress ±10%N/m2 of the measured mean stress <0.10 >0.95 <10%Wave height ±10% of the measured mean observed height <0.15 >0.95 <10%Wave period ±20% of the measured mean observed period <0.20 >0.90 <20%Wave direction ±30% of the measured mean observed direction <0.25 >0.90 <25%Mean SPM concentration ±20% of the mean measured SPM concentration <0.20 >0.90 <20%Accretion based on dredge volumes ±50% of the measured dredge volume N/A N/A N/ATemperature ±0.5° — — —Salinity ±1 psu — — —
20 Advances in Civil Engineering

MLWS: Mean low water of spring tidesMLWN: Mean low water of neap tidesMSL: Mean sea levelN: NewtonNi: Total number of dataNTU: Nephelometric turbidity unitsOBS: Optical backscatter sensorsODN: Ordnance Datum NewlynOSGB: Ordnance Survey Great BritainOi: Observed wave dataPOT: Peak over thresholdPT: Pressure transducerQ: Sediment transportQA: Quality assuranceQMS: Quality management systemR: Pearson product-moment correlation
coe9cientRMS: Root mean squareSET: Sedimentation erosion tableSI: Scatter indexSi: Simulated or model dataSSC: Suspended sediment concentrationTm: Mean wave periodTp: Spectral peak wave periodTz: Mean wave periodWGS84: *e new world geodetic systemWW3: WaveWatch 3G: Gramkg: Kilogramks: Equivalent sand roughnessl: Litremg: Milligrams: Secondε: Rate of turbulent energy dissipationκ: Rate of turbulent kinetic energy productionμ: Micron (10−6m)θ: Wave direction (degrees)θm: Mean wave direction (degrees)τ: Bed shear stress (N/m2).
Conflicts of Interest
*e authors declare that there are no con6icts of interestregarding the publication of this paper.
References
[1] G. P. Evans, “A framework for marine and estuary modelspeci.cation in the UK,” Tech. Rep. FR0374, p. 58, Foundationfor Water Research, 1993.
[2] J. M. Bartlett, “Quality control manual for computationalestuarine modelling, Binnie, Black & Veatch, R&D,” Tech.Rep. W113, p. 80, Environment Agency, 1998.
[3] Defra/Environment Agency, “Protocols for minimum standardsin modelling–6ood warning management system phase 2a,”Tech. Rep.W5C-021/2a, Report prepared forDefra/EnvironmentAgency FCERM management R&D Programme, 2005.
[4] Defra/Environment Agency, “Benchmarking the latestgeneration of 2D hydraulic modelling packages,” Tech. Rep.
SC120002, Joint Defra/EA FCERM R&D programme projectSC120002, 2013.
[5] M.-H. Hsu, A. Y. Kuo, J.-T. Kuo, and W.-C. Liu, “Procedureto calibrate and verify numerical models of estuarine hy-drodynamics,” Journal of Hydraulic Engineering, vol. 125,no. 2, pp. 166–182, 1999.
[6] B. Yan, Y. Jia, and J. B. Hinwood, “Use of one-dimensionalmodelling in estuary management: entrance depth: modelcalibration,” Journal of Coastal Conservation, vol. 17, no. 1,pp. 191–196, 2013.
[7] Y. P. Sheng, “On modeling three-dimensional estuarine andmarine hydrodynamics,” Elsevier Oceanography Series,vol. 45, pp. 35–54, 1987.
[8] H. V. Gupta, K. J. Beven, and T.Wagener, “Model calibrationand uncertainty estimation,” in Encyclopedia of HydrologicalSciences, John Wiley & Sons, Ltd., Hoboken, USA, 2005.
[9] M. Sousa and J. M. Dias, “Hydrodynamic model calibrationfor a mesotidal lagoon: the case of Ria de Aveiro (Portugal),”Journal of Coastal Research, vol. 6, pp. 1075–1080, 2007.
[10] D. O. Lambkin, J. M. Harris, W. S. Cooper, and T. Coates,Coastal Process Modelling for OAshore Wind Farm Envi-ronmental Impact Assessment: Best Practice Guide, COWRIELimited, London, UK, 2009.
[11] D. P. Dee, “A pragmatic approach to model validation,”in Quantitative Skill Assessment for Coastal Ocean Models,vol. 47 of Coastal and Estuarine Studies, pp. 1–13, 1995.
[12] R. H. van Waveren, S. Groot, H. Scholten et al., Good Mod-elling Practice Handbook, STOWAReport 99-05, RWS-RIZA,Utrecht, Netherlands, http://waterland.net/riza/aquest.
[13] L. Ma, J. C. Ascough II, L. R. Ahuja, M. J. Sha7er,J. D. Hanson, and K. W. Rojas, “Root zone water qualitymodel sensitivity analysis using Monte Carlo simulation,”Transactions of the American Society of AgriculturalEngineers, vol. 43, no. 4, pp. 883–895, 2000.
[14] J. G. Arnold, D. N. Moriasi, P. W. Gassman et al., “SWAT:model use, calibration, and validation,” Transactions of theAmerican Society of Agricultural and Biological Engineers,vol. 55, no. 4, pp. 1491–1508, 2012.
[15] M. W. van Liew, J. G. Arnold, and D. D. Bosch, “Problemsand potential of autocalibrating a hydrologic model,”Transactions of the American Society of AgriculturalEngineers, vol. 48, no. 3, pp. 1025–1040, 2005.
[16] Q. D. Duan, V. K. Gupta, and S. Sorooshian, “E7ective ande9cient global optimization for conceptual rainfall-runo7models,” Water Resources Research, vol. 28, no. 4,pp. 1015–1031, 1992.
[17] R. M. Errico, “What is an adjoint model?” Bulletin AmericanMeteorological Society, vol. 78, no. 11, pp. 2577–2591, 1997.
[18] M. Guarracino, M. Dowd, J. Sheng, and J. J. Cullen,“Calibration of a coupled biological–physical model forprediction in a coastal inlet,” Continental Shelf Research,vol. 31, no. 16, pp. 1713–1727, 2011.
[19] D. M. Mulcare, NGS Toolkit, Part 9: Ee National GeodeticSurvey VERTCON Tool, Professional Surveyor, vol. 24, no. 3,2004.
[20] L. Cea and J. R. French, “Bathymetric error estimation for thecalibration and validation of estuarine hydrodynamicmodels,” Estuarine, Coastal and Shelf Science, vol. 100,pp. 124–132, 2012.
[21] N. G. Plant, K. T. Holland, and J. A. Puleo, “Analysis of thescale of errors in nearshore bathymetric data,” MarineGeology, vol. 191, no. 1-2, pp. 71–86, 2002.
[22] N. G. Plant, K. L. Edwards, J. M. Kaihatu, J. Veeramony,L. Hsu, and K. T. Holland, “*e e7ect of bathymetric .ltering
Advances in Civil Engineering 21

on nearshore process model results,” Coastal Engineering,vol. 56, no. 4, pp. 484–493, 2009.
[23] B. Mourre, P. De Mey, F. Lyard, and C. Le Provost,“Assimilation of sea level data over continental shelves: anensemble method for the exploration of model errors dueto uncertainties in bathymetry,” Dynamics of Atmospheresand Oceans, vol. 38, no. 2, pp. 93–121, 2004.
[24] J. Nikuradse, Laws of Flow in Rough Pipes, National AdvisoryCommittee for Aeronautics, WA, USA, 1950.
[25] R. Manning, “On the 6ow of water in open channels andpipes,” Transactions of the Institution of Civil Engineers ofIreland, vol. 20, pp. 161–207, 1891.
[26] A. Chezy, “Formula to .nd the uniform velocity that thewater will have in a ditch or in a canal of which the slopeis known,” Journal Association of Engineering Societies, 1776.File No. 847, vol. 18, pp. 363–369, Ms. 1915 in the Libraryof Ecole des Ponts et Chaussees, English translation inH. Clemens, On the origin of the Chezy formula, 1897.
[27] A. Lefebvre and A. P. Lyons, “Quanti.cation of roughness forseabed characterization,” in Proceedings of the 4th InternationalConference on Underwater Acoustic Measurements: Technologiesand Results, Kos Island, Greece, June 2011.
[28] M. Guerrero, V. Di Federico, and A. Lamberti, “Calibrationof a 2-D morphodynamic model using water–sediment 6uxmaps derived from an ADCP recording,” Journal ofHydroinformatics, vol. 15, no. 3, pp. 813–828, 2013.
[29] N. Huybrechts, H. Smaoui, A. Ouahsine et al., “Prediction ofthe bed friction coe9cient using either high resolutionbathymetric data or granulometry samples,” in Proceedings ofthe XXth TELEMAC-MASCARET User Conference (TUC2013), p. 109, Karlsruhe, Germany, October 2013.
[30] A. J. Cooper, “TELEMAC-2D version 3.0-validation docu-ment,” Report EDF-LNH HE-43/96/006/A, 74 pages, 1993.
[31] J. M. Hervouet and P. Bates, “*e TELEMAC modellingsystem—special issue,” Hydrological Processes, vol. 14, no. 13,pp. 2207–2208, 2000.
[32] X. Bertin, A. Oliveira, and A. B. Fortunato, “Simulatingmorphodynamics with unstructured grids: description andvalidation of a modeling system for coastal applications,”Ocean Modelling, vol. 28, no. 1, pp. 75–87, 2009.
[33] M. H. Hsu, C. J. Huang, A. S. Chen, and Y. T. Chou,“Inundation simulation model with local grid re.nement,”in Proceedings of the 34th World Congress of the Interna-tional Association for Hydro-Environment Research andEngineering: 33rd Hydrology and Water Resources Symposiumand 10th Conference on Hydraulics in Water Engineering,p. 4360, Engineers Australia, Brisbane, Australia, June–July2011.
[34] H. W. Kernkamp, A. van Dam, G. S. Stelling, and E. D. deGoede, “E9cient scheme for the shallow water equations onunstructured grids with application to the ContinentalShelf,” Ocean Dynamics, vol. 61, no. 8, pp. 1175–1188, 2011.
[35] X. Liu and L. Ren, “Optimal selection of grid-scale for landsurface model in the numerical simulation of spring soilmoisture,” Journal of China Agricultural University, vol. 5,p. 030, 2012.
[36] J. J. Maynard and M. G. Johnson, “Scale-dependency ofLiDAR derived terrain attributes in quantitative soil-landscape modeling: e7ects of grid resolution vs. neigh-borhood extent,” Geoderma, vol. 230, pp. 29–40, 2014.
[37] K. El Kheiashy, J. McCorquodale, I. Georgiou, andE. Meselhe, “Bed forms resistance dependency on numericalmodel grid size spatial resolution,” Journal of Spatial Science,vol. 59, no. 2, pp. 363–372, 2014.
[38] G. W. Brier, “Veri.cation of forecasts expressed in terms ofprobabilities,”Monthly Weather Review, vol. 78, no. 1, pp. 1–3,1950.
[39] K. A. Haas, I. A. Svendsen, M. C. Haller, and Q. Zhao,“Quasi-three-dimensional modeling of rip current systems,”Journal of Geophysical Research: Oceans, vol. 108, no. C7,pp. 1978–2012, 2003.
[40] J. E. Nash and J. V. Sutcli7e, “River 6ow forecasting throughconceptual models part I—A discussion of principles,”Journal of Hydrology, vol. 10, no. 3, pp. 282–290, 1970.
[41] I. G. Watterson, “Non-dimensional measures of climatemodel performance,” International Journal of Climatology,vol. 16, no. 4, pp. 379–391, 1996.
[42] D. R. Legates and G. J. McCabe Jr, “Evaluating the use of“goodness-of-.t” measures in hydrologic and hydroclimaticmodel validation,” Water Resources Research, vol. 35, no. 1,pp. 233–241, 1999.
[43] P. W. Mielke Jr. and K. J. Berry, Permutation Methods: ADistance Function Approach, Springer-Verlag, New York,USA, p. 352, 2001.
[44] C. J. Willmott, “On the validation of models,” PhysicalGeography, vol. 2, no. 2, pp. 184–194, 1981.
[45] L. C. van Rijn, D. J. R. Walstra, B. Grasmeijer, J. Sutherland,S. Pan, and J. P. Sierrae, “*e predictability of cross-shore bedevolution of sandy beaches at the time scale of storms andseasons using process-based pro.le models,” Coastal Engi-neering, vol. 47, no. 3, pp. 295–327, 2003.
[46] C. J. Willmott, S. M. Robeson, and K. Matsuura, “A re.nedindex of model performance,” International Journal of Cli-matology, vol. 32, no. 13, pp. 2088–2094, 2012.
[47] Y. P. Sheng and T. Kim, “Skill assessment of an integratedmodeling system for shallow coastal and estuarine ecosystems,”Journal of Marine Systems, vol. 76, no. 1-2, pp. 212–243, 2009.
[48] J. C. Warner, W. R. Geyer, and J. A. Lerczak, “Numericalmodeling of an estuary: a comprehensive skill assessment,”Journal of Geophysical Research: Oceans, vol. 110, no. C5,pp. 1978–2012, 2005.
[49] R. C. Ris, L. H. Holthuijsen, and N. Booij, “A third-generationwave model for coastal regions 2. Veri.cation,” Journal ofGeophysical Research, vol. 104, no. C4, pp. 7667–7681, 1999.
[50] R. L. Soulsby, Dynamics of Marine Sands. A Manual forPractical Applications, *omas Telford Publications, London,UK, 1997.
[51] H. U. Oebius, Circulation and Sediment Transport on Sand-Banks in European Shelf Seas. Part: Development of a ShearStress Meter, Report No. 1208/92, VWS, Berlin, Germany,p. 100, 1992.
[52] A. J. Grass, R. R. Simons, R. D. MacIver, M. Mansour-Tehrani, and A. Kalopedis, “Shear cell for direct measure-ment of 6uctuating bed shear stress vector in combined wavecurrent 6ow,” in Proceedings of the 26th IAHR Congress“HYDRA 2000”, pp. 415–421, London, UK, September 1995.
[53] K. L. Rankin and R. I. Hires, “Laboratory measurement ofbottom shear stress on a movable bed,” Journal of GeophysicalResearch: Oceans, vol. 105, no. C7, pp. 17011–17019, 2000.
[54] K. E. Steele, C. C. Teng, and D. W. C. Wang, “Wave directionmeasurements using pitch-roll buoys,” Ocean Engineering,vol. 19, no. 4, pp. 349–375, 1992.
[55] G. J. Komen, L. Cavaleri, M. Donelan, K. Hasselmann,S. Hasselmann, and P. A. E. M. Janssen, Dynamics andModelling of Ocean Waves, Cambridge University Press,New York, NY, USA, 1996.
[56] H. E. Krogstad, S. F. Barstow, S. E. Aasen, and I. Rodriguez,“Some recent developments in wave buoy measurement
22 Advances in Civil Engineering

technology,” Coastal Engineering, vol. 37, no. 3-4, pp. 309–329, 1999.
[57] H. E. Krogstad, J. Wolf, S. P. *ompson, and L. R. Wyatt,“Methods for intercomparison of wave measurements,”Coastal Engineering, vol. 37, no. 3-4, pp. 235–257, 1999.
[58] S. Lindroth and M. Leijon, “O7shore wave power meas-urements—a review,” Renewable and Sustainable EnergyReviews, vol. 15, no. 9, pp. 4274–4285, 2011.
[59] T. P. Jardine, “*e reliability of visually observed waveheights,” Coastal Engineering, vol. 3, pp. 33–38, 1980.
[60] J. J. De Vries, J. Waldron, and V. Cunningham, “Field tests ofthe new Datawell DWR-G GPA wave buoy,” Sea Technology,vol. 44, no. 12, pp. 50–55, 2003.
[61] H. E. Krogstad and S. F Barstow, “Satellite wave measure-ments for coastal engineering applications,” Coastal Engi-neering, vol. 37, no. 3-4, pp. 283–307, 1999.
[62] I. R. Young, S. Zieger, and A. V. Babanin, “Development andapplication of a global satellite database of wind and waveconditions,” in Proceeding of the 34th Conference on Ocean,OAshore, and Arctic Engineering, vol. 7, pp. 62–71, St. John’s,Canada, May–June 2015.
[63] L. R. Wyatt, J. B. D. Ja7res, and M. L. Heron, “Spatialaveraging of HF radar data for wave measurement appli-cations,” Journal of Atmospheric and Oceanic Technology,vol. 30, no. 9, pp. 2216–2224, 2013.
[64] J. Wolf and P. S. Bell, “Waves at Holderness from X-bandradar,” Coastal Engineering, vol. 43, no. 3-4, pp. 247–263,2001.
[65] R. A. Holman and J. Stanley, “*e history and technicalcapabilities of Argus,” Coastal Engineering, vol. 54, no. 6-7,pp. 477–491, 2007.
[66] G. Z. Forristall and K. C. Ewans, “Worldwide measurementsof directional wave spreading,” Journal of Atmospheric andOceanic Technology, vol. 15, no. 2, pp. 440–469, 1998.
[67] R. M. Gorman and C. G. Neilson, “Modelling shallow waterwave generation and transformation in an intertidal estuary,”Coastal Engineering, vol. 36, no. 3, pp. 197–217, 1999.
[68] N. Booij, L. H. Holthuijsen, and R. C. Ris, “*e “SWAN”wave model for shallow water,” in Proceedings of the 25thInternational Conference on Coastal Engineering, Orlando,FL, USA, September 1996.
[69] D. G. Wren, B. D. Barkdoll, R. A. Kuhnle, and R. W. Derrow,“Field techniques for suspended-sediment measurement,”Journal of Hydraulic Engineering, vol. 126, no. 2, pp. 97–104,2000.
[70] P. Le Hir, Y. Monbet, and F. Orvain, “Sediment erodability insediment transport modelling: can we account for biotae7ects?,” Continental Shelf Research, vol. 27, no. 8,pp. 1116–1142, 2007.
[71] C. L. Amos, J. Grant, G. R. Daborn, and K. Black, “Seacarousel—a benthic, annular 6ume,” Estuarine, Coastal andShelf Science, vol. 34, no. 6, pp. 557–577, 1992.
[72] J. J. Wang, X. X. Lu, and M. Kummu, “Sediment load es-timates and variations in the Lower Mekong River,” RiverResearch and Applications, vol. 27, no. 1, pp. 33–46, 2011.
[73] J. J. Williams, “Recent advancements in understanding ofsediment processes,” in Sediments, Morphology, and Sedi-mentary Processes on Continental Shelves, Special Publicationof the International Association of Sedimentologists (IAS),M. Li, C. Sherwood, and P. Hill, Eds., John Wiley & Sons,Hoboken, USA, 2012.
[74] C. W. Emerson, “A method for the measurement of bedloadsediment transport and passive faunal transport on intertidalsand6ats,” Estuaries, vol. 14, no. 4, pp. 361–371, 1991.
[75] K. D. van der Post, F. Old.eld, and G. Voulgaris, “Magnetictracing of beach sand: preliminary results,” in Proceedings ofthe Coastal Dynamics’94, pp. 323–334, ASCE, Barcelona,Spain, February 1994.
[76] K. S. Black, S. Athey, P. Wilson, and D. Evans, “*e use ofparticle tracking in sediment transport studies: a review,”Geological Society, London, Special Publications, vol. 274,no. 1, pp. 73–91, 2007.
[77] D. C. Mason, M. Amin, I. J. Davenport, R. A. Flather,G. J. Robinson, and J. A. Smith, “Measurement of recentintertidal sediment transport in Morecambe Bay using thewaterline method,” Estuarine, Coastal and Shelf Science,vol. 49, no. 3, pp. 427–456, 1999.
[78] J. W. Gartner, “Estimating suspended solids concentrationsfrom backscatter intensity measured by acoustic Dopplercurrent pro.ler in San Francisco Bay, California,” MarineGeology, vol. 211, no. 3-4, pp. 169–187, 2004.
[79] C. D. Rennie and P. V. Villard, “Site speci.city of bed loadmeasurement using an acoustic Doppler current pro.ler,”Journal of Geophysical Research: Earth Surface, vol. 109,no. F3, 2004.
[80] J. J. Williams, P. S. Bell, and P. D. *orne, “Field mea-surements of 6ow .elds and sediment transport abovemobile bed forms,” Journal of Geophysical Research: Oceans,vol. 108, no. C4, 2003.
[81] J. G. Venditti, M. Church, and S. J. Bennett, “Morphody-namics of small-scale superimposed sand waves over mi-grating dune bed forms,” Water Resources Research, vol. 41,no. 10, 2005.
[82] C. R. Bates and D. J. Oakley, “Bathymetric sidescan in-vestigation of sedimentary features in the Tay Estuary,Scotland,” International Journal of Remote Sensing, vol. 25,no. 22, pp. 5089–5104, 2004.
[83] A. Mudroch and S. D. MacKnight, Handbook of Techniquesfor Aquatic Sediments Sampling, CRC Press, Boca Raton, FL,USA, 1994.
[84] L.*omsen, G. Graf, V.Martens, and E. Steen, “An instrumentfor sampling water from the benthic boundary layer,”Continental Shelf Research, vol. 14, no. 7, pp. 871–882, 1994.
[85] J. P. Minella, G. H. Merten, J. M. Reichert, and R. T. Clarke,“Estimating suspended sediment concentrations from tur-bidity measurements and the calibration problem,” Hydro-logical Processes, vol. 22, no. 12, pp. 1819–1830, 2008.
[86] A. Ziegler, Issues related to use of turbidity measurements asa surrogate for suspended sediment. Turbidity and OtherSediment Surrogates Workshop, Reno, NV, USA, 2002.
[87] F. Mietta, C. Chassagne, R. Verney, and J. C. Winterwerp,“On the behavior of mud 6oc size distribution: model cal-ibration and model behavior,” Ocean Dynamics, vol. 61,no. 2-3, pp. 257–271, 2011.
[88] J. P. Downing, R.W. Sternberg, and C. R. B. Lister, “Newinstrument for the investigation of sediment suspensionprocesses in the shallow marine environment,” MarineGeology, vol. 42, no. 1-4, pp. 19–34, 1981.
[89] M. O. Green and J. D. Boon, “*e measurement of con-stituent concentrations in non-homogeneous sedimentsuspensions using optical backscatter sensors,” MarineGeology, vol. 110, no. 1-2, pp. 73–81, 1993.
[90] T. F. Sutherland, P. M. Lane, C. L. Amos, and J. Downing,“*e calibration of optical backscatter sensors for suspendedsediment of varying darkness levels,” Marine Geology,vol. 162, no. 2-4, pp. 587–597, 2000.
[91] G. C. Kineke and R. W. Sternberg, “Measurements of highconcentration suspended sediments using the optical
Advances in Civil Engineering 23

backscatterance sensor,” Marine Geology, vol. 108, no. 3-4,pp. 253–258, 1992.
[92] A. J. F. Hoitink and P. Hoekstra, “Observations of suspendedsediment from ADCP and OBS measurements in a mud-dominated environment,” Coastal Engineering, vol. 52, no. 2,pp. 103–118, 2005.
[93] E. Boss, L. Taylor, S. Gilbert et al., “Comparison of inherentoptical properties as a surrogate for particulate matterconcentration in coastal waters,” Limnology & Oceanogra-phy: Methods, vol. 7, no. 11, pp. 803–810, 2009.
[94] R. P. Stump and J. R. Pennock, “Calibration of a generaloptical equation for remote sensing of suspendedsediments in a moderately turbid estuary,” Journal of Geo-physical Research: Oceans, vol. 94, no. C10, pp. 14363–14371,1989.
[95] B. Nechad, K. G. Ruddick, and Y. Park, “Calibration andvalidation of a generic multisensor algorithm for mapping oftotal suspended matter in turbid waters,” Remote Sensing ofEnvironment, vol. 114, no. 4, pp. 854–866, 2010.
[96] P. D.*orne and P. J. Hardcastle, “Acoustic measurements ofsuspended sediments in turbulent currents and comparisonwith in-situ samples,” Journal of the Acoustical Society ofAmerica, vol. 101, no. 5, pp. 2603–2614, 1997.
[97] A. M. Crawford and A. E. Hay, “Determining suspendedsand size and concentration from multifrequency acousticbackscatter,” Journal of the Acoustical Society of America,vol. 94, no. 6, pp. 3312–3324, 1993.
[98] L. M. Merckelbach and H. Ridderinkhof, “Estimating sus-pended sediment concentration using backscatterance froman acoustic Doppler pro.ling current meter at a site withstrong tidal currents,” Ocean Dynamics, vol. 56, no. 3-4,pp. 153–168, 2006.
[99] I. Townend and P. Whitehead, “A preliminary net sedimentbudget for the Humber Estuary,” Science of the Total Envi-ronment, vol. 314, pp. 755–767, 2003.
[100] J. E. Hughes Clarke, L. A. Mayer, and D. E. Wells, “Shallow-water imaging multibeam sonars: a new tool for investigatingsea6oor processes in the coastal zone and on the continentalshelf,” Marine Geophysical Research, vol. 18, no. 6,pp. 607–629, 1996.
[101] J. V. Gardner, P. Dartnell, L. A. Mayer, and J. E. HughesClarke, “Geomorphology, acoustic backscatter, and pro-cesses in Santa Monica Bay from multibeam mapping,”Marine Environmental Research, vol. 56, no. 1-2, pp. 15–46,2003.
[102] P. K. Pandian, S. Ramesh, M. V. R. Murthy, S. Ramachandran,and S. *ayumanavan, “Shoreline changes and near shoreprocesses along Ennore coast, East coast of south India,”Journal of Coastal Research, vol. 203, pp. 828–845, 2004.
[103] P. L. Barnard, D. M. Hanes, and D. M. Rubin, “Giant sandwaves at the mouth of San Francisco Bay,” Eos, vol. 87, no. 29,pp. 285–289, 2006.
[104] M. C. Buijsman and H. Ridderinkhof, “Long-term evolutionof sand waves in the Marsdiep inlet. I: high-resolution ob-servations,” Continental Shelf Research, vol. 28, no. 9,pp. 1190–1201, 2008.
[105] J. L. D. Woods and D. M. Kennedy, “*e measurement ofmodern sedimentation in estuarine environments in NewZealand,” New Zealand Geographer, vol. 67, no. 1, pp. 39–50,2011.
[106] J. Wozencraft and D. Millar, “Airborne Lidar and integratedtechnologies for coastal mapping and nautical charting,”Marine Technology Society Journal, vol. 39, no. 3, pp. 27–35,2005.
[107] P. S. Bell, “Shallow water bathymetry derived from ananalysis of X-band marine radar images of waves,” CoastalEngineering, vol. 37, no. 3-4, pp. 513–527, 1999.
[108] F. Cayocca, R. Verney, S. Petton et al., “Development andvalidation of a sediment dynamics model within a coastaloperational oceanographic system,” Mercator Ocean-Quarterly Newsletter, vol. 49, no. 2, pp. 76–86, 2014.
[109] N. K. Ganju and D. H. Schoellhamer, “Calibration of an estu-arine sediment transport model to sediment 6uxes as an in-termediate step for robust simulation of geomorphic evolution,”Continental Shelf Research, vol. 29, no. 1, pp. 148–158, 2009.
[110] C. Teisson, “Cohesive suspended sediment transport: feasi-bility and limitations of numerical modelling,” Journal ofHydraulic Research, vol. 29, no. 6, pp. 755–769, 1991.
[111] W. S. Merritt, R. A. Letcher, and A. J. Jakeman, “A review oferosion and sediment transport models,” EnvironmentalModelling & Software, vol. 18, no. 8-9, pp. 761–799, 2003.
[112] L. C. van Rijn, “Uni.ed view of sediment transport bycurrents and waves. I: initiation of motion, bed roughness,and bed-load transport,” Journal of Hydraulic Engineering,vol. 133, no. 6, pp. 649–667, 2007.
[113] R. J. Whitehouse, R. L. Soulsby, W. Roberts, andH. Mitchener, Dynamics of Estuarine Muds, *omas TelfordPublications, Heron Quay, London, UK, 2000.
[114] H. J. Mitchener, H. Torfs, and R. J. S. Whitehouse, “Erosionof sand/mud mixtures,” Coastal Engineering, vol. 29, no. 1-2,pp. 1–25, 1996.
[115] T. van Kessel, J. Vanlede, and J. de Kok, “Development ofa mud transport model for the Scheldt estuary,” ContinentalShelf Research, vol. 31, no. 10, pp. S165–S181, 2011.
[116] L. Carniello, A. De.na, and L. D’Alpaos, “Modeling sand-mud transport induced by tidal currents and wind waves inshallow microtidal basins: application to the Venice Lagoon(Italy),” Estuarine, Coastal and Shelf Science, vol. 102,pp. 105–115, 2012.
[117] D. Roelvink, J. A Roelvink, and A. Reniers, A Guide toModeling Coastal Morphology, Vol. 12, World Scienti.c,Singapore, 2011.
[118] L. O. Amoudry and A. J. Souza, “Deterministic coastalmorphological and sediment transport modelling: a reviewand discussion,” Reviews of Geophysics, vol. 49, no. 2, 2011.
[119] M. van der Wegen and B. E. Ja7e, “Towards a probabilisticassessment of process-based, morphodynamic models,”Coastal Engineering, vol. 75, pp. 52–63, 2013.
[120] K. D. Splinter, I. L. Turner, and M. A. Davidson, “How muchdata is enough? *e importance of morphological samplinginterval and duration for calibration of empirical shorelinemodels,” Coastal Engineering, vol. 77, pp. 14–27, 2013.
[121] J. Sutherland, A. H. Peet, and R. L. Soulsby, “Evaluating theperformance of morphological models,” Coastal Engineering,vol. 51, no. 8-9, pp. 917–939, 2004.
[122] G. Lesser, J. A. Roelvink, J. A. T. M. Van Kester, andG. S. Stelling, “Development and validation of a three-dimensional morphological model,” Coastal Engineering,vol. 51, no. 8-9, pp. 883–915, 2004.
[123] L. C. van Rijn, Principles of Sediment Transport in Rivers,Estuaries and Coastal Seas, Vol. 1006, Aqua Publications,Amsterdam, Netherlands, 1993.
[124] J. Holden, An Introduction to Physical Geography and theEnvironment, Pearson Education, London, UK, 2005.
[125] R. Ranasinghe, C. Swinkels, A. Luijendijk et al., “Morpho-dynamic upscaling with the MORFAC approach: de-pendencies and sensitivities,” Coastal Engineering, vol. 58,no. 8, pp. 806–811, 2011.
24 Advances in Civil Engineering

[126] A. A. Nemeth, S. J. M. H. Hulscher, and R. M. J. van Damme,“Simulating o7shore sand waves,” Coastal Engineering,vol. 53, no. 2-3, pp. 265–275, 2006.
[127] M. Knaapen, I. H. Townend, K. Rossington, C. A. Fletcher,and J. Spearman, “Modelling the dynamics of intertidalmud6at and salt marshes within estuaries,” Environmentalist,vol. 84, pp. 12–15, 2009.
[128] D. Roelvink, A. Reniers, A. van Dongeren, J. de Vries,R. McCall, and J. Lescinski, “Modeling storm impacts onbeaches, dunes and barrier islands,” Coastal Engineering,vol. 56, no. 11-12, pp. 1133–1152, 2009.
[129] J. A. Roelvink, A. Reniers, A. van Dongeren, J. de Vries,J. Lescinski, and R. McCall, XBeach Model Description andManual, Deltares/TU Delft, Netherlands, 2009.
[130] J. A. Roelvink, “Coastal morphodynamic evolution tech-niques,” Coastal Engineering, vol. 53, no. 2-3, pp. 277–287,2006.
[131] G. Lesser, An Approach to Medium-Term Coastal Morpho-logical Modeling, Ph.D. thesis, Delft University of Technol-ogy, Delft, Netherlands, 2009, ISBN 978-0-415-55668-2.
[132] D. M. P. K. Dissanayake, R. Ranasinghe, and J. A. Roelvink,“E7ect of sea level rise on tidal inlet evolution,” Journal ofCoastal Research, vol. 56, no. 2, pp. 942–946, 2009.
[133] T. R. Scott and D. C. Mason, “Data assimilation for a coastalarea morphodynamic model: Morecambe Bay,” CoastalEngineering, vol. 54, no. 2, pp. 91–109, 2007.
[134] P. J. Smith, G. D. *ornhill, S. L. Dance, A. S. Lawless,D. C. Mason, and N. K. Nichols, “Data assimilation for stateand parameter estimation: application to morphodynamicmodelling,” Quarterly Journal of the Royal MeteorologicalSociety, vol. 139, no. 671, pp. 314–327, 2013.
[135] K. Chu, C. Winter, D. Hebbeln, and M. Schulz, “Improve-ment of morphodynamic modeling of tidal channel migra-tion by nudging,” Coastal Engineering, vol. 77, pp. 1–13, 2013.
[136] N. Margvelashvili, J. Andrewartha, M. Herzfeld, B. J. Robson,and V. E. Brando, “Satellite data assimilation and estimationof a 3D coastal sediment transport model using error-subspace emulators,” Environmental Modelling & Software,vol. 40, pp. 191–201, 2013.
[137] T. Mayo, T. Butler, C. Dawson, and I. Hoteit, “Data as-similation within the Advanced Circulation (ADCIRC)modeling framework for the estimation of Manning’s fric-tion coe9cient,” Ocean Modelling, vol. 76, pp. 43–58, 2014.
[138] G. Y. El Serafy, M. A. Eleveld, M. Blaas, T. van Kessel,S. G. Aguilar, and H. J. van der Woerd, “Improving thedescription of the suspended particulate matter concentra-tions in the southern North Sea through assimilating re-motely sensed data,” Ocean Science Journal, vol. 46, no. 3,pp. 179–204, 2011.
[139] N. Margvelashvili and E. Campbell, “Sequential data as-similation in .ne resolution models using error subspaceemulators: theory and preliminary evaluation,” Journal ofMarine Systems, vol. 90, no. 1, pp. 13–22, 2012.
[140] W. S. Parker, “Ensemble modeling, uncertainty androbust predictions,”Wiley Interdisciplinary Reviews: ClimateChange, vol. 4, no. 3, pp. 213–223, 2013.
Advances in Civil Engineering 25

RoboticsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Journal of
Volume 201
Submit your manuscripts athttps://www.hindawi.com
VLSI Design
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 201
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Modelling & Simulation in EngineeringHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
DistributedSensor Networks
International Journal of