
Graphic Objects figure axes 2D-plot 3D-plot axis labels title GUI objects pushbutton toggle edit...
88
Graphic Objects • figure • axes • 2D-plot • 3D-plot • axis labels • title GUI objects • pushbutton • toggle • edit • text • menu
Transcript of Graphic Objects figure axes 2D-plot 3D-plot axis labels title GUI objects pushbutton toggle edit...
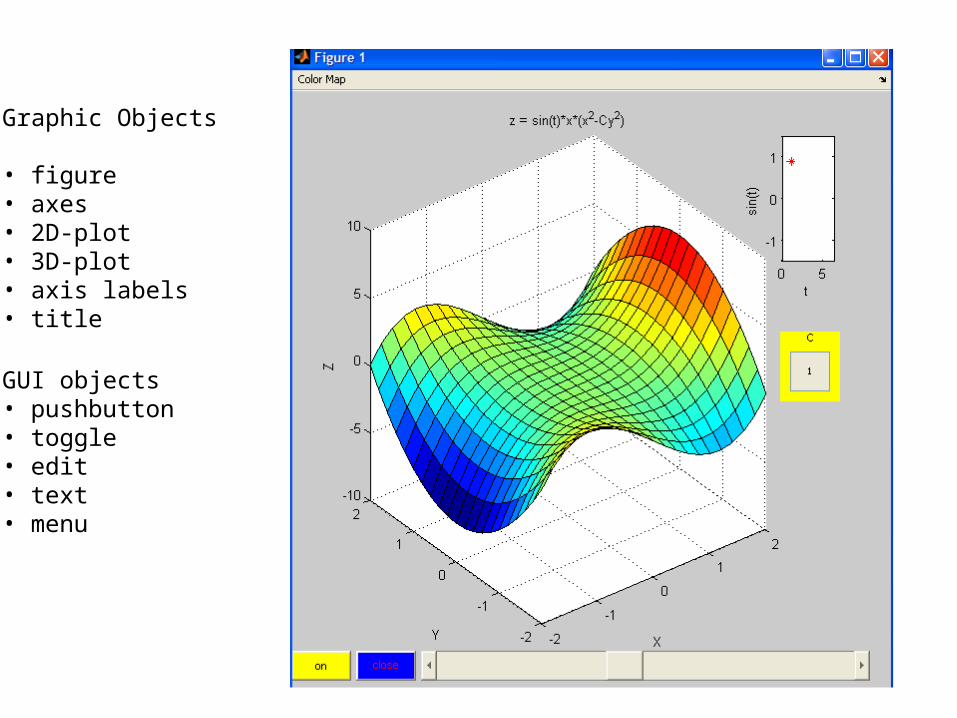
Graphic Objects
• figure• axes• 2D-plot• 3D-plot• axis labels• title
GUI objects• pushbutton• toggle• edit• text• menu

Continuing with our GUI project

Sliders
Sliders provide an easy way to gradually change values between a given range.
Three ways to move the slider

Sliders
The user has three possible way to change the position of the slider
1.Click the arrow buttons => small value changes
2.Click the trough => large value changes
3.Click and drag the slider => depends on user
The default changes are 1% and 10%
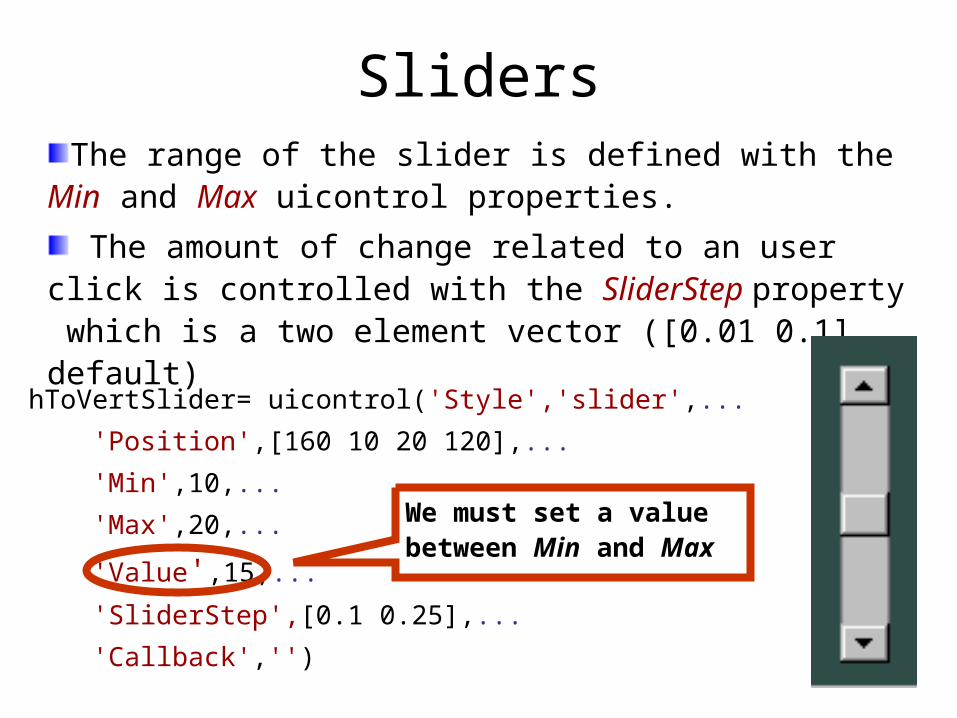
SlidersThe range of the slider is defined with the Min and
Max uicontrol properties.
The amount of change related to an user click is controlled with the SliderStep property which is a two element vector ([0.01 0.1] default)
hToVertSlider= uicontrol('Style','slider',...
'Position',[160 10 20 120],...
'Min',10,...
'Max',20,...
'Value',15,... 'SliderStep',[0.1 0.25],...
'Callback','')
We must set a value between Min and Max

Sliders
Given the setting from Min, Max and SliderStep the amount of change to the current Value are as follow:
For an arrow click:
Value = Value + SliderStep(1) * (Max – Min)
16 = 15 + 0.1 * (20 - 10)
For a trough click:
Value = Value + SliderStep(2) * (Max – Min)
17.5 = 15 + 0.25 * (20 - 10)

Step V– the speed slider
uicontrol('style' ,'slider',.... 'position',[130 10 450 30],... 'tag' ,'speedSlider',... 'max' ,pi/2,... 'min' ,0.01,... 'value' ,pi/4);

Step V– the speed slider
uicontrol('style' ,'slider',.... 'position',[130 10 450 30],... 'tag' ,'speedSlider',... 'max' ,pi/2,... 'min' ,0.01,... 'value' ,pi/4);
What about the callback?

Text and editable text Static texts are commonly used to give
instructions or to display other controllers values (such as sliders)
…’Style’,’text’,…
Static text can not execute callbacks.
Editable texts gets string input from the GUI user.
When the user enters the edit field and change its content, only the String property is affected.
Editable text can execute callbacks

Step VI – the text frame
uicontrol('style' ,'text',... 'string' ,'C',... 'tag' ,'C_title',... 'position' ,[490 290 60 70],... 'backgroundColor','y');
What about the callback?

Step VII – the edit window
uicontrol('style' ,'edit',... 'string' ,'1',... 'value' ,1,... 'tag' ,'C',... 'position',[500 300 40 40],... 'callback', {@getC});
function getC(calling_button, eventData) s = get(calling_button,'string'); set(calling_button,'value',str2double(s));end

Radio Buttons
Radio buttons are similar to checkboxes but designed to specify options that are mutually exclusive like in multiple-choice questions
hToRadio1 = uicontrol('Style', 'radio',...
'Position',[20 300 120 20],...
'String','Option1',...
'Callback', {@turnOffTheOtherButtons},...
'Value',1)
Selected
Function turnOffTheOtherButtons
h = findobj('Tag','option1');
set(h,'Value',0);
:
:
Do we need a different function for each button?

Step VIII – the radio buttons
uicontrol('style' ,'radio',... 'string' ,'surf',... 'callback', {@plotTypeButtons},... 'tag' ,'plot_type',... 'position',[490 250 80 30],... 'value' ,1,... 'userdata',1);
uicontrol('style' ,'radio',... 'string' ,'contour3',... 'callback', {@plotTypeButtons},... 'tag' ,'plot_type',... 'position',[490 220 80 30],... 'value' ,0,... 'userdata',0);
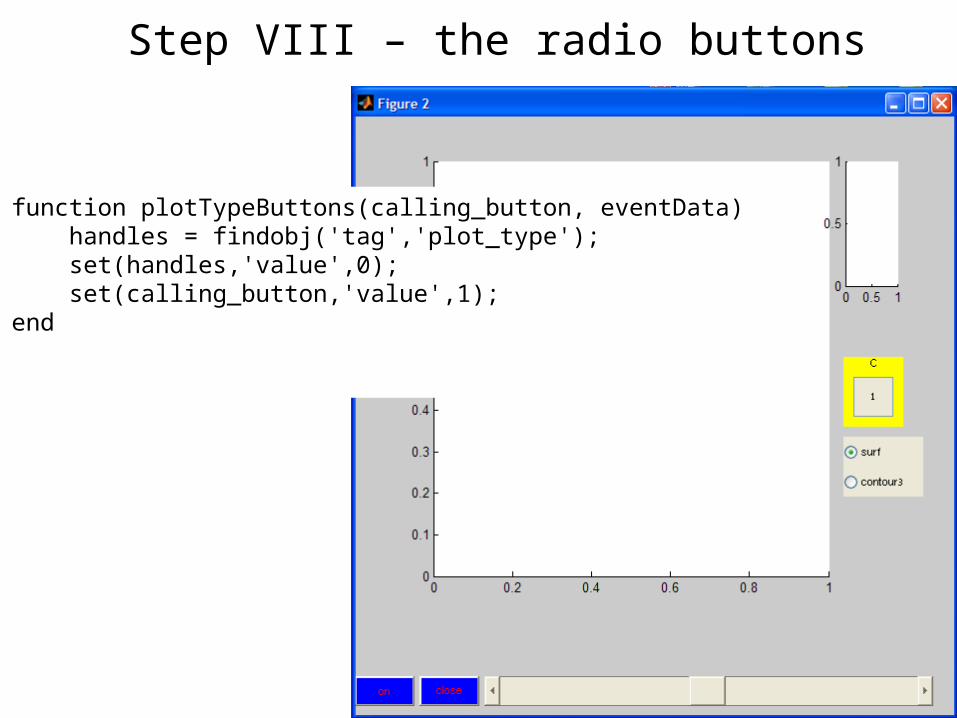
Step VIII – the radio buttons
function plotTypeButtons(calling_button, eventData) handles = findobj('tag','plot_type'); set(handles,'value',0); set(calling_button,'value',1);end
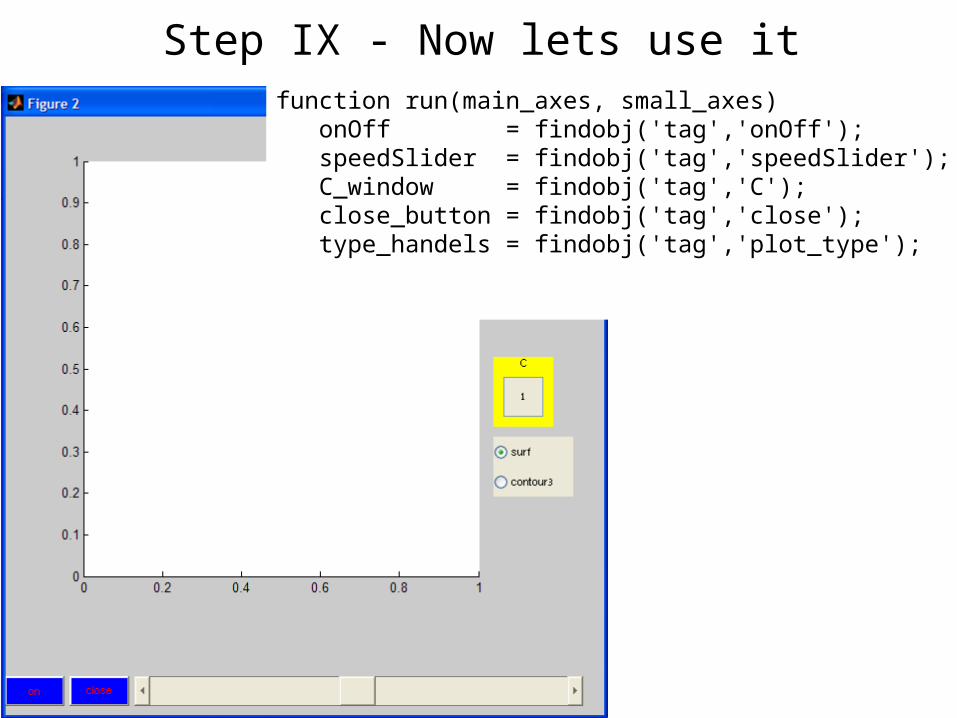
Step IX - Now lets use itfunction run(main_axes, small_axes) onOff = findobj('tag','onOff'); speedSlider = findobj('tag','speedSlider'); C_window = findobj('tag','C'); close_button = findobj('tag','close'); type_handels = findobj('tag','plot_type');

Step IX - Now lets use itfunction run(main_axes, small_axes) onOff = findobj('tag','onOff'); speedSlider = findobj('tag','speedSlider'); C_window = findobj('tag','C'); close_button = findobj('tag','close'); type_handles = findobj('tag','plot_type');
How does type_handles differ from the other handles?

kill = get(close_button,'userData'); [x y] = meshgrid(-2:0.2:2); t = 0.001; while (~kill) on = get(onOff,'userData'); C = get(C_window,'value'); speed = get(speedSlider,'value'); kill = get(close_button,'userData');
activeB = findobj(type_handels,'value',1); plotType = get(activeB,'userdata');
if (on) draw(x,y,main_axes,small_axes,t,C,plot_type); t = t + speed; if (t >= 2*pi) t = 0.0001; end end pause(0.1); end

kill = get(close_button,'userData'); [x y] = meshgrid(-2:0.2:2); t = 0.001; while (~kill) on = get(onOff,'userData'); C = get(C_window,'value'); speed = get(speedSlider,'value'); kill = get(close_button,'userData');
activeB = findobj(type_handels,'value',1); plotType = get(activeB,'userdata');
if (on) draw(x,y,main_axes,small_axes,t,C,plot_type); t = t + speed; if (t >= 2*pi) t = 0.0001; end end pause(0.1); end

kill = get(close_button,'userData'); [x y] = meshgrid(-2:0.2:2); t = 0.001; while (~kill) on = get(onOff,'userData'); C = get(C_window,'value'); speed = get(speedSlider,'value'); kill = get(close_button,'userData');
activeB = findobj(type_handels,'value',1); plotType = get(activeB,'userdata');
if (on) draw(x,y,main_axes,small_axes,t,C,plot_type); t = t + speed; if (t >= 2*pi) t = 0.0001; end end pause(0.1); end

kill = get(close_button,'userData'); [x y] = meshgrid(-2:0.2:2); t = 0.001; while (~kill) on = get(onOff,'userData'); C = get(C_window,'value'); speed = get(speedSlider,'value'); kill = get(close_button,'userData');
activeB = findobj(type_handels,'value',1); plotType = get(activeB,'userdata');
if (on) draw(x,y,main_axes,small_axes,t,C,plot_type); t = t + speed; if (t >= 2*pi) t = 0.0001; end end pause(0.1); end

kill = get(close_button,'userData'); [x y] = meshgrid(-2:0.2:2); t = 0.001; while (~kill) on = get(onOff,'userData'); C = get(C_window,'value'); speed = get(speedSlider,'value'); kill = get(close_button,'userData');
activeB = findobj(type_handels,'value',1); plotType = get(activeB,'userdata');
if (on) draw(x,y,main_axes,small_axes,t,C,plot_type); t = t + speed; if (t >= 2*pi) t = 0.0001; end end pause(0.1); end fig = findobj('tag','the_figure'); close(fig);end
cm = uimenu('tag','colorMap','label','Color Map');
Step XI – Adding color map menu
cm = uimenu('tag','colorMap','label','Color Map'); uimenu(cm, 'label','jet', ‘callback',{@set_colorMap,jet});uimenu(cm, 'label','hot', 'callback',{@set_colorMap,hot});uimenu(cm, 'label','cool', 'callback',{@set_colorMap,cool});
Step XI – Adding color map menu
function set_colorMap(calling_manu, eventData,colorMap) set(gcf,'colorMap',colorMap); parent = get(calling_manu,'parent'); all = get(parent,'children'); set(all,'checked','off'); set(calling_manu,'checked','on'); end

hToCheckBox =
uicontrol('Style', 'checkbox',...
'Position',[20 450 120 20],...
'String','Check Box example‘, ...
‘Callback’,’’)
Checkboxes allow the user to turn on/off a number of independent options
Note: the position is measured in pixels from the left-bottom corner of the figure
Checkboxes

26
Basics of Linear Algebra
start with two examples:
In 1st : We do not need Linear AlgebraIn 2nd : Linear Algebra is needed

27
Consider a species where N represents number of individuals. This species reproduces with a very simple rule: in any generation t (t = 0,1,2,....), the population changes its size by a factor of R.
Hence, at t+1 size of population isN(t+1) = R N(t).
Question: if we start with a population of size N(0), what will be its size after t generations?

28
gen=[1 2 3 4 5 6 7 8 9 10];
N0=100; %initial condition for populations
n1=N0; R1=1.1; %Params for population 1n2=N0; R2=0.9; %Params for population 2
for t=1:10 % numerical computation P1(t) = n1; n1 = n1*R1; %change pop 1 P2(t) = n2; n2 = n2*R2; %change pop 2 end
plot(gen,P1,'or:',gen,P2,'^b-');
Numerical computation (for two possible values of R)-

29
if R>1, the population grows to infinity. if R<1 it decays to 0.
P1
P2

30
In this case, there is an analytical solution
Back to Question: if we start with a population of size N(0), what will be its size after t generations?
In our case, the answer is trivial – no need for numerical computation:
For every t N(t+1) = RN(t)
Hence-N(t) = Rt N(0).
In our example-N1(10) = 1.110 * 100 = 2.59 *100 = 259 N2(10) = 0.910 * 100 = 0.35 *100 = 35

31
Simple problems have
analytical solutions
Complex problems can be solved only with
numerical computations

32
Reproduction-
1) age=0 (from birth to the age of 1) does not reproduce 2) age=1 yields 2 offsprings 3) age=2 yields 1.5 offsprings
Survival-
4) 40% of age 0 survive to next generation 5) 30% of age 1 survive to next generation6) 10% age 2 survive to next generation7) No females of age 3 survive.
For example, consider a species in which parameters are age-dependent.

33
Here the answer is more complex, because the system is defined by several equations, not only one:
Let Ni denote the number of individuals of age i.
N0(t+1) = 2N1(t)+1.5N2(t)N1(t+1) = 0.4N0(t)N2(t+1) = 0.3N1(t)N3(t+1) = 0.1N2(t)
N(t+1) = N0(t+1)+N1(t+1)+N2(t+1)+N3(t+1)
We may want to ask a questions like: what will be N(T)
We may want to ask additional questions like: when will the fraction of newborn stay constant, i.e:
Find t such that N0(t)/N(t) = N0(t+1)/N(t+1)?

34
To solve this problem, we need techniques from Linear Algebra.
Start by reviewing important concepts in Linear Algebra.
Will come back to this problem later, after learning some Linear Algebra

35
Matrix addition/substraction
Suppose A=[ai,j] and B=[bi,j] are two m x n matrices. ThenC=A+B is an m x n matrix where ci,j = ai,j+bi,j
for 1 im, 1j n
Example-
30
42
3011
1302
31
10
01
32
C
BA

36
Matrix addition/substraction
Example with 3 matrices-
60
41
330011
013102
30
01
31
10
01
32
CBA
CBA

37
Matrix Multiplication-
Suppose A=[ai,k] is an m by l matrix and B =[bk,j] is
an l by n matrix.
Then: C=A B is an m by n matrix with:
l
kkjikji bac
1,
mi 1
nj 1
In other words, in matrix C an element at place i,j is the result of multiplying the elements of row i in A by the elements of column j in B, and sum them up.
This is small L in Italics

38
Example-
1201
0410
3321
401
321BA
BAC The multiplication is valid, because the number of columns in A is equal to the number of rows in B.
24232221
14131211
cccc
ccccC
The result is a matrix with 2 rows (number of rows in A) and 4 columns (number of columns in B).
To find any element cij, we multiply the elements of the ith row in A by the elements of the jth column of B, and sum them-
11803)2)(4()4)(0()3)(1(23 c
Second row elements in A
Third column elements in B
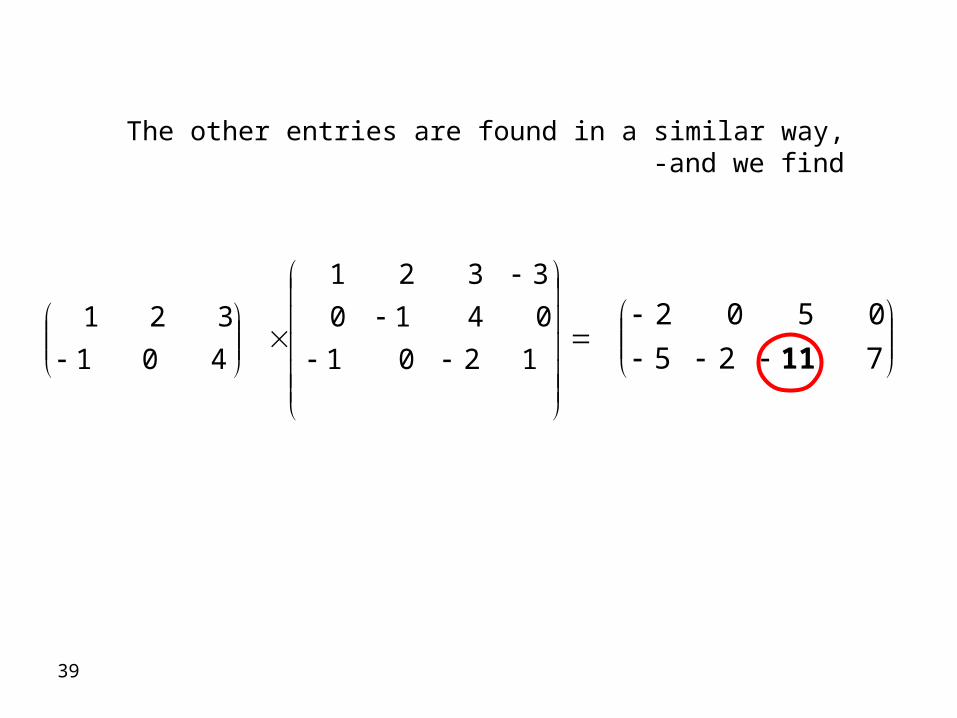
39
1201
0410
3321
401
321
The other entries are found in a similar way, and we find-
725
0502
11

40
In Matrix multiplication, the order is important ! in other words, AB BA:
Example:
112
0
1
1
AB
000
112
112
AB

41
In Matrix multiplication, the order is important ! in other words, AB BA:
Example:
112
0
1
1
AB
000
112
112
AB

42
In Matrix multiplication, the order is important ! in other words, AB BA:
Example where we reverse order of multiplication:
0
1
1
112 BA
000
112
112
AB
1)0)(1()1)(1()1)(2( BA
)from previous slide(

43
Check that you did it right
Suppose A=[ai,k] is an m by l matrix and B =[bk,j] is
an l by n matrix.
Then: C=A B is an m by n matrix with:
l
kkjikji bac
1,
mi 1
nj 1
Test 1: Rows of first matrix = columns in second matrix
Test 1

44
Check that you did it right
Suppose A=[ai,k] is an m by l matrix and B =[bk,j] is
an l by n matrix.
Then: C=A B is an m by n matrix with:
l
kkjikji bac
1,
mi 1
nj 1
Test 2
Test 1: Columns of first matrix = rows in second matrixTest 2: dimensions of resulting matrix are the rows of first and columns of second
45
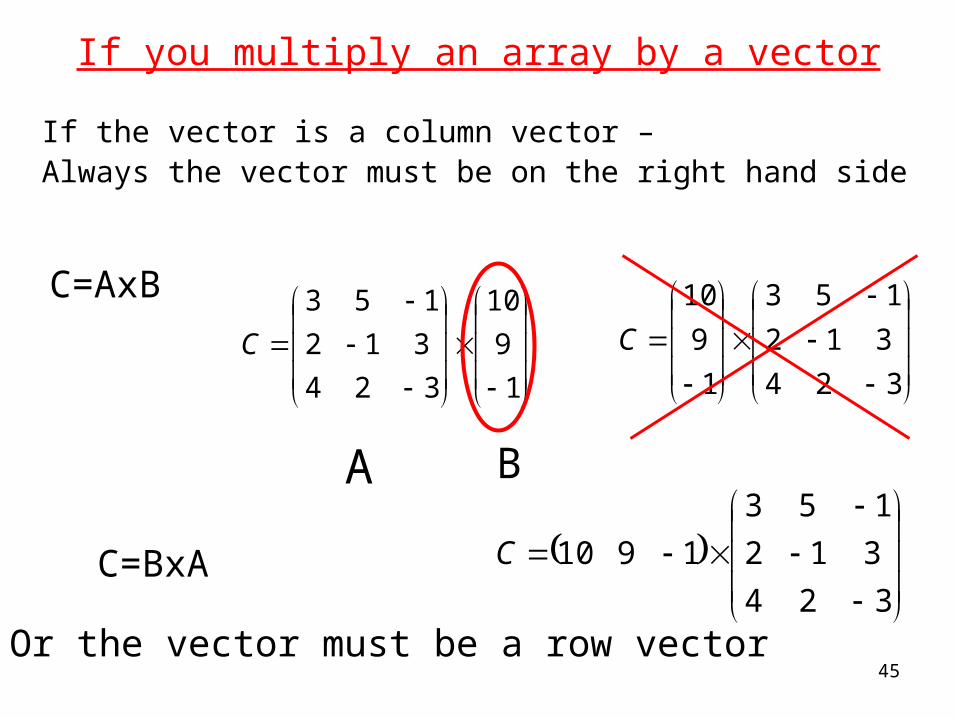
If you multiply an array by a vector
If the vector is a column vector – Always the vector must be on the right hand side
1
9
10
324
312
153
C
C=AxB
A B
324
312
153
1
9
10
C
324
312
153
1910C
Or the vector must be a row vector
C=BxA

46
Writing a system of linear equations in matrix form
nnnnnn
nn
nn
bxaxaxa
bxaxaxa
bxaxaxa
...
................................................
...
...
2211
22222121
11212111
Consider the following system of n equations with n variables xi, i=1..n.
It is convenient to represent this system of equations in matrix form:
nnnnnn
n
n
b
b
b
x
x
x
aaa
aaa
aaa
....
....
..............................
....
....
2
1
2
1
21
22221
11211
CoefficientMatrix
Vector of variables
Vector of Right Hand Side (RHS)Values
Matrix MultiplicationOperator

47
The system above can be also written in short :
bxA
CoefficientMatrix
Vector of variables
Vector of Right Hand Side (RHS)Values
Matrix MultiplicationOperator
bxA Or simply-

48
Power of Matrices
timesnAAA
AAA
n
..
2
Note- A must be a square matrix !!! Otherwise multiplication is undefined
So far – Linear Algebra. Let’s move back to MATLAB

49
Summary of what you know about Matrices in MatLab
1) A matrix is entered row-wise, with consecutive elements of a row separated by a space or a comma A=[ 1 2 3 ] A=[ 1, 2, 3 ]
2) Rows are separated by semicolons or carriage returns. B= [ 1 2 3 4 5 6 ]
3) Entire matrix must be enclosed within square brackets A=[ 1 2 3 ] 4) A single element of the matrix is accessed by specifying its index(ices), in round brackets. B(2,3)=6
5) Vector - a special case of a matrix. Can be column vector, or row vector
6) Scalar is a single element. It does not need brackets.
7) A null matrix is a matrix with no elements. It is defined by empty brackets []
50
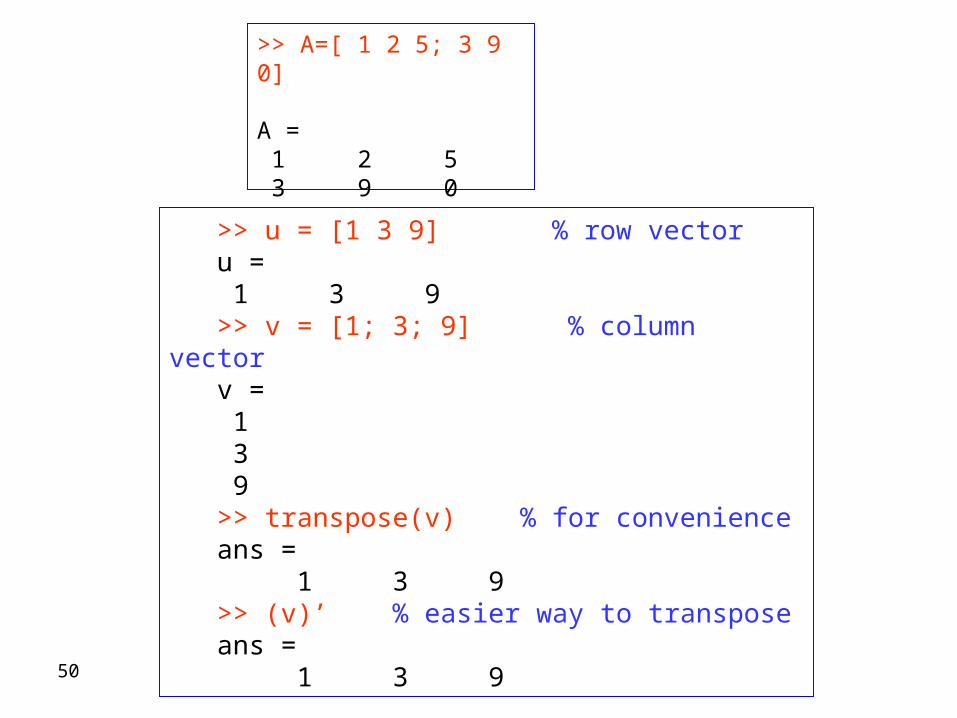
>> A=[ 1 2 5; 3 9 0]
A = 1 2 5 3 9 0
>> u = [1 3 9] % row vectoru = 1 3 9>> v = [1; 3; 9] % column vectorv = 1 3 9>> transpose(v) % for convenienceans = 1 3 9>> (v)’ % easier way to transposeans = 1 3 9

51
Matrix Transposition.
In this operation, rows and columns are interchanged:
654
321A
For example, if
Then-
6
5
4
3
2
1
'A
A convenient operation: When writing text, easier to write a column as row vector (takes less space).

52
>> A=[3 5 -1; 2 -1 3; 4 2 -3]; B=[1 2 3]
>> C=A*B??? Error using ==> *Inner matrix dimensions
must agree.
>> B=[1; 2; 3]>> C=A*B
>> (C)’ 10 9 -1
Matrix multiplication in MatLab-
Use the * operator to multiply matrices.Do NOT use the dot operation here (reserved for element by element)Make sure dimension are correct

53
The problem and its solutions
In a system with several linear equations Ax= b, given A and b, what is the vector of variables x ?
Three main Techniques:
1. Gaussian elimination and back-substitution2. The inverse matrix 3. Matrix division { related
1
9
10
324
312
153
3
2
1
x
x
xA b
54
Technique 1to solve Ax = b
Gaussian Elimination
55
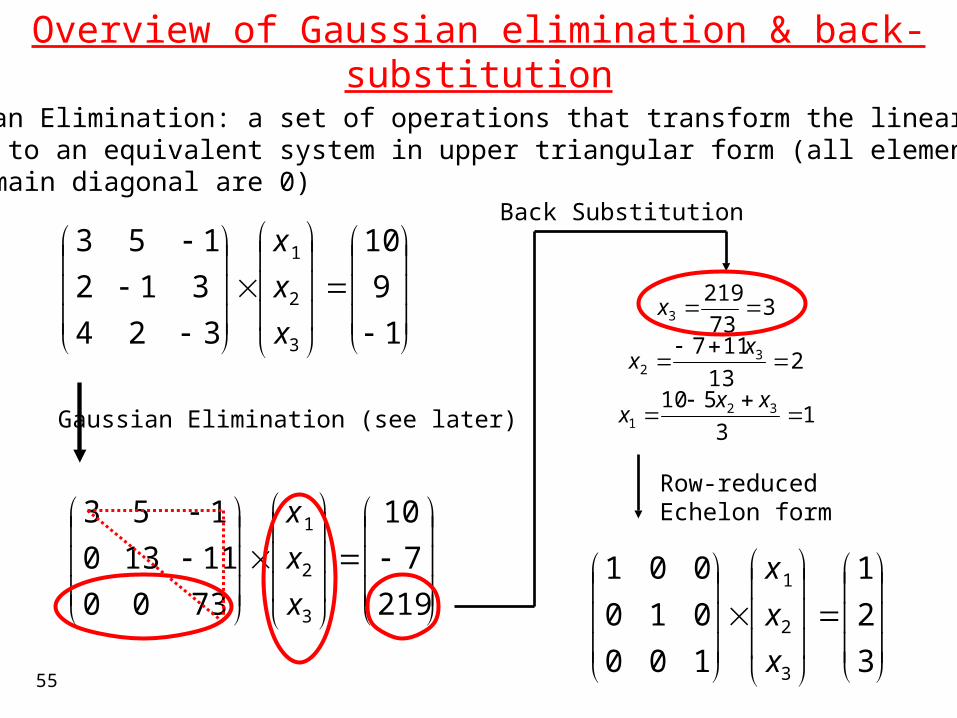
Overview of Gaussian elimination & back-substitution
1
9
10
324
312
153
3
2
1
x
x
x
219
7
10
7300
11130
153
3
2
1
x
x
x
Gaussian Elimination: a set of operations that transform the linear system to an equivalent system in upper triangular form (all elements below main diagonal are 0)
Gaussian Elimination (see later) 13
510
213
117
373
219
321
32
3
xxx
xx
x
Back Substitution
3
2
1
100
010
001
3
2
1
x
x
x
Row-reducedEchelon form

56
Needed for the Gaussian elimination:
Two basic operations can be used to transform a system oflinear equations into an equivalent system:
(1) Multiply an equation by a nonzero number(2) Adding one equation to the other
(we may need to use both operations)
Let’s remember some 8th grade algebra:
An equivalent system is a system of equations where thesolution is the same as the original system.

57
Example:
Eq. I: 3x + 2y = 8
Eq. II: 2x + 4y = 5
The solution of a system of several equations is found where the lines intersect
Solution

Multiplying Eq. I by +2, and Eq. II by -3 gives :Why did we choose these numbers? can get rid of x
Eq. I’: 6x + 4y = 16
Eq. II’: -6x - 12y = -15
Solution (where the lines intersect): same as before the operation
Solution
58

Replacing Eq. II’ by (Eq. I’+ Eq. II’) is like adding to Eq. II’ the other, Eq. I’ :
Eq. I’’: 6x + 4y = 16
Eq. II’’: -8y = 1
Solution (where the lines intersect): same as before operation
Solution
59
60
From here, finding the solution is easy-
If -8y = 1
Substituting y=-0.125 in one of the equations-
3x+2*(-0.125)=83x = 8+(0.25)=8.25x=8.25/3
y=-0.125
x=3.75

61
What did we do ?
3x + 2y = 8 Eq.I2x + 4y = 5 Eq. II
We multiplied Eq.I by +2 and Eq. II by -3:
6x + 4y = 16 Eq.I’ = Eq.I x 2-6x + -12y = -15 Eq. II’ = Eq. II x -3
We replaced Eq.II’ by (Eq.I’+ Eq. II’):
6x + 4y = 16 Eq.I’’ = Eq. I’ 0x + -8y = 1 Eq. II’’ = Eq. I’ + Eq. II’
We obtained an equivalent system of equations , where one of the Equations depended on a single variable.
From here, it was easy to find the value of this variable. Once this variable was known, it was easy to find the value of the second variable.

In Matrix Form-
We can write the original system:
5
8
42
23
y
x
By gaussian elimination, we transformed it to an equivalent system where the matrix is in upper triangular form:
1
16
80
46
y
x
By back-substitution, we produced an equivalent system where each equationdepends on a single variable (Row-reduced-echelon form)
125.0
75.2
10
01
y
x
3x + 2y = 8 2x + 4y = 5
x = 2.75 y = -0.125
63
The same procedure can be used to solve any arbitrary system of linear equations

64
Finding the solution of a linear system of equations using Gaussian Elimination in
MatLab
Step I: producing an augmented matrix: a matrix that consists of the Coefficient matrix, concatenated with the vector of Right hand side values.
Step II: using the function rref to produce a row-reduced echelon form of the system.
Step III: extracting the solution vector from the row-reduced echelon system
65
Step I: producing an augmented matrix-
<<A = [3 5 -1; 2 -1 3; 4 2 -3]; <<B = [10; 9; -1]; <<C= [A B] % C is the augmented matrix
C=
3 5- 1 10 2- 1 3 9 4 2- 3- 1
1
9
10
324
312
153
z
y
x

66
Step II: extracting the solution vector
>> D=rref(C) % produce a row-reduced echelon form
D =
1 0 0 1 0 1 0 2 0 0 1 3
>> x=D(:,4)‘ % extract the solution vector
x =
1 2 3
3 MATLAB code lines and we have the solution…

67
Step II: extracting the solution vector
If we had 4 equations with 3 unknowns (one equation not providing new information), we would gain nothing.Gaussian elimination would lead to same three solutions:
>> D=rref(C) % produce a row-reduced echelon form D = 1 0 0 1 0 1 0 2 0 0 1 3 0 0 0 0

68
Important point:
A system of linear equations can have no solutions, or it can have an infinite number of solutions
69
Infinitely many solutions:
Example in 2D: two equations that define the same curve
824
42
yx
yx
xy
xy
24
24
xx 2424
00
Extraction of y:
Always (for all x) true

No solutions:
Example in 2D: two equations that define parallel curves
624
42
yx
yx
xy
xy
23
24
xx 2324
34
Extraction on y:
Never true
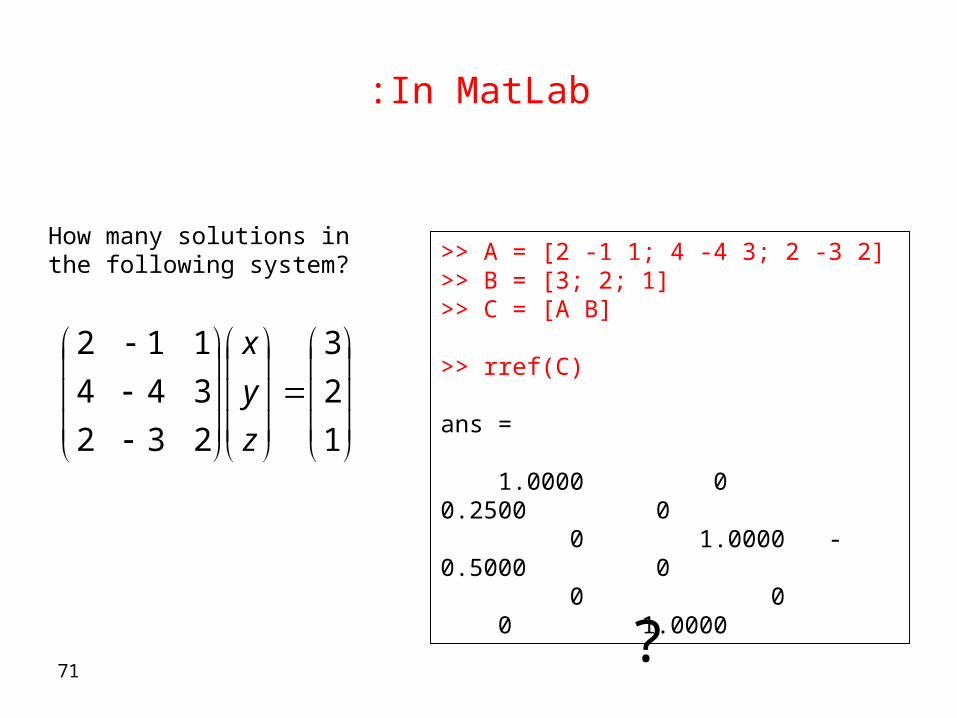
71
In MatLab:
>> A = [2 -1 1; 4 -4 3; 2 -3 2]>> B = [3; 2; 1]>> C = [A B]
>> rref(C)
ans =
1.0000 0 0.2500 0 0 1.0000 -0.5000 0 0 0 0 1.0000
How many solutions in the following system?
1
2
3
232
344
112
z
y
x
?

72
In MatLab:
>> A = [1 -3 1; 1 -2 3; 2 -6 2]>> B = [4; 6; 8]>> C = [A B]
>> rref(C)
ans =
1 0 7 10 0 1 2 2 0 0 0 0
How many solutions in the following system?
8
6
4
262
321
131
z
y
x
?

73
Technique 2to solve Ax = b
The inverse matrix
74
The identity matrixThe inverse matrixNon-singular and Singular matricesThe determinant
Some terminology.…

The identity matrix
An important matrix is the identity matrix, denoted by In. The identity
matrix is an nn matrix with 1s on its diagonal line and 0s elsewhere:
100
010
001
3I
Important property: if A is an m n matrix, then
AIn=ImA=A
In matrix operations, the use of the identity matrix is equivalent to the use of “1” in scalar operations.

76
The inverse matrix
Suppose that A is an n n square matrix. If there exists an n n square matrix B such that
AB = BA = In
then B is called the inverse matrix of A, and it is denoted by A-1.
Example-
22
21A
5.01
11B
10
01
5.0*221*21*2
5.0*211*21*1
5.01
11
22
21AB
10
01
2*5.022*5.01*1
2*12*12*11*1
22
21
5.01
11BA
Hence B = A-1
77
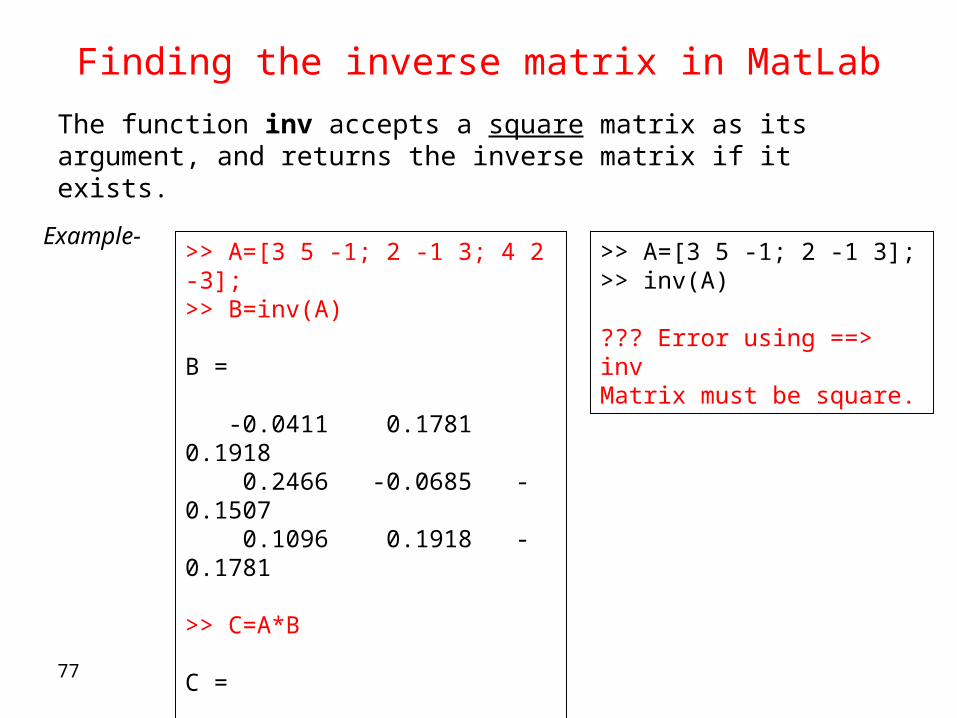
Finding the inverse matrix in MatLab
The function inv accepts a square matrix as its argument, and returns the inverse matrix if it exists.
Example->> A=[3 5 -1; 2 -1 3; 4 2 -3];>> B=inv(A)
B =
-0.0411 0.1781 0.1918 0.2466 -0.0685 -0.1507 0.1096 0.1918 -0.1781
>> C=A*B
C =
1.0000 0 0.0000 0 1.0000 0 0 0 1.0000
>> A=[3 5 -1; 2 -1 3];>> inv(A)
??? Error using ==> invMatrix must be square.
78
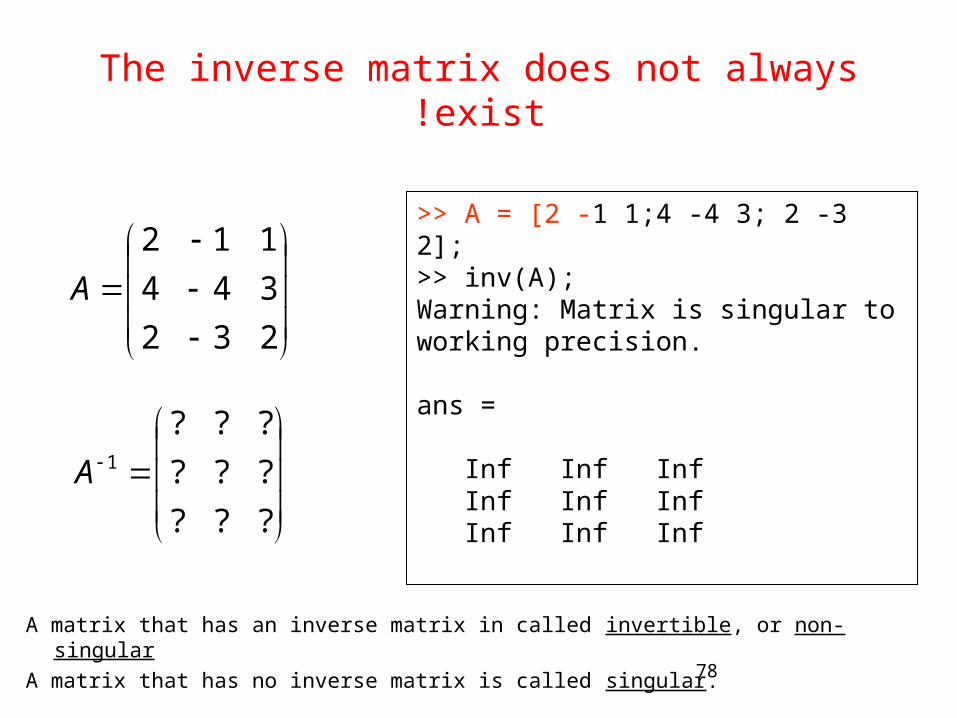
The inverse matrix does not always exist!
A matrix that has an inverse matrix in called invertible, or non-singular
A matrix that has no inverse matrix is called singular.
>> A = [2 -1 1;4 -4 3; 2 -3 2];>> inv(A);Warning: Matrix is singular to working precision.
ans =
Inf Inf Inf Inf Inf Inf Inf Inf Inf
232
344
112
A
???
???
???1A
79
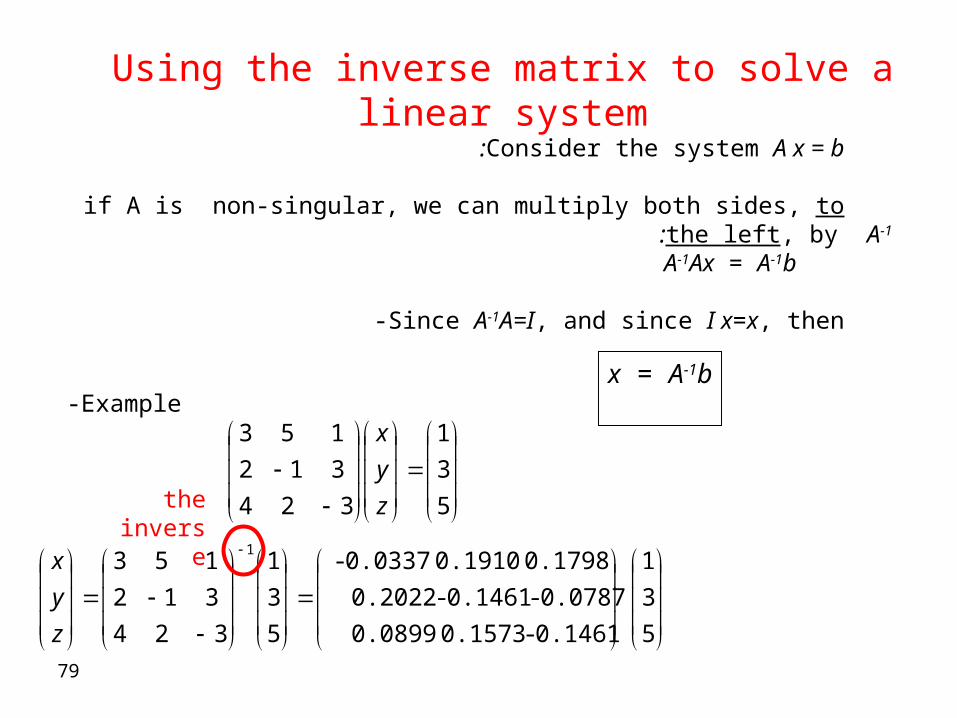
Using the inverse matrix to solve a linear system
Consider the system A x = b:
if A is non-singular, we can multiply both sides, to the left, by A-1:A-1Ax = A-1b
Since A-1A=I, and since I x=x, then-
Example-x = A-1b
5
3
1
324
312
153
z
y
x
5
3
1
0.1461- 0.1573 0.0899
0.0787- 0.1461- 0.2022
0.1798 0.1910 0.0337-
5
3
1
324
312
1531
z
y
x
the inverse

80
Example-
5
3
1
324
312
153
z
y
x
5
3
1
0.1461- 0.1573 0.0899
0.0787- 0.1461- 0.2022
0.1798 0.1910 0.0337-
5
3
1
324
312
1531
z
y
x
0.1685-
0.6292-
1.4382
z
y
x

81
The determinant of a matrixAny square matrix has an associated number, which describes it (like
age isassociated with, and partially describes, a person .(
For a 2 x 2 matrix, the determinant is equal to the product of the elements on
the main diagonal minus the product of the elements on the secondary diagonal:
The determinant can be defined for any n x n matrix- However,we will not give the general formula here, since it is somewhat
complicated for n > 2 .
2221
1211
aa
aaA 21122211)det( aaaaA If Then:
The main diagonal is shown in red. The secondary diagonal is shown in blue.

82
The determinant of a matrix in MatLab
In MatLab, use the function det to find the determinant:
>> a=[2 -1 1; 4 -4 3; 2 -3 2];>> b=[3 5 1; 2 -1 3; 4 2 -3];>> fprintf(1,'%d %d',det(a),det(b))
0 89
>> A=[-1 -3; 1 -2];>> det(A)
5

83
A Matrix is invertible (non-singular) if and only if its determinant is non-zero
Take this as a fact. We will not prove this statement here.
Without explaining exactly how, the inverse matrix of matrix A can be computed by using the term 1/det(A). (see revision pages in web site for details, if you are really curious). If det(A) = 0, the term
1/det(A) is undefined, hence the inverse matrix cannot be computed.
>> b=[3 5 1; 2 -1 3; 4 2 -3];>> inv(b)
ans =
-0.0337 0.1910 0.1798 0.2022 -0.1461 -0.0787 0.0899 0.1573 -0.1461>> det(b)ans =
89
>> a=[2 -1 1; 4 -4 3; 2 -3 2];>> inv(a)Warning: Matrix is singular to working precision.
ans =
Inf Inf Inf Inf Inf Inf Inf Inf Inf>> det(a)ans =
0

84
Using the inverse matrix to solve a linear system in MatLab
<<A=[3 5 1; 2 -1 3; 4 2 -3]; <<b=[1; 3; 5];
<<x = inv(A)*b
x=
1.4382- 0.6292- 0.1685
We solved it in one line of MATLAB code…
)unless we want to test ahead of time that det(A) is not 0(
Consider the system A x = b:

85
Technique 3to solve Ax=b
Matrix Division

Matrix division:Matrix Division is equivalent to multiply by the inverse matrix. We distinguish between left division (\) and right division (/)
Left Division: A\B is equivalent to multiplying A-1 to the left of B.
A\B = A-1B
Right Division: A/B is equivalent to multiplying B-1 to the right of A.
A/B = A B-1
Hence, to solve the equation Ax = b , we left-divide both sides of the equation by A:
Ax = b A\Ax = A\b x = A\b

Matrix division to solve a linear system in MatLab
>> A=[3 5 1; 2 -1 3; 4 2 -3];>> b=[1; 3; 5];
>> x=A\b
x =
1.4382 -0.6292 -0.1685
% But not-
>> x=A/b??? Error using ==> /Matrix dimensions must agree.
>> A = [2 -1 1;4 -4 3; 2 -3 2];>> b=[1; 3; 5];>> x=A\bWarning: Matrix is singular to working precision.
x =
Inf Inf Inf
What about the cases where there is no solution?
We solved it in one line of MATLAB code, but shorter…
(unless we want to test ahead of time that det(A) is not 0 )

88
Left division is almost the same as taking the inverse of the matrix and multiplying
It is faster and more numerically stable
The Gaussian elimination method is mainly good to check your solutions…
Remember to review this lesson before next week! Lot’s of things based on it.


















