Graphene R2R · Web view-axis load cell as, F x1 = F M1 + T 2 - T 1 , F x2 = F M2 + T 3 - T 2 ....
21
Supporting information Damage mitigation in roll-to-roll transfer of CVD-graphene to flexible substrates Bongkyun Jang 1,2 , Chang-Hyun Kim 1,3 , Seung Tae Choi 4 , Kyung-Shik Kim 1 , Kwang-Seop Kim 1,3 , Hak-Joo Lee 1,5 , Seung-Min Cho 6 , Jong-Hyun Ahn 7 , Jae-Hyun Kim 1,3,∗ 1 Department of Nano Mechanics, Nano-Convergence Mechanical Systems Research Division, Korea Institute of Machinery and Materials (KIMM), Daejeon 34103, Republic of Korea 2 Material Science Laboratory, Graduate School of Engineering, Department of Mechanical Engineering and Science, Kyoto University, Kyoto 615-8540, Japan 3 Nano Mechatronics, Korea University of Science and Technology (UST), Daejeon 34113, Republic of Korea 4 School of Mechanical Engineering, Chung-Ang University, Seoul
Transcript of Graphene R2R · Web view-axis load cell as, F x1 = F M1 + T 2 - T 1 , F x2 = F M2 + T 3 - T 2 ....

Supporting information
Damage mitigation in roll-to-roll transfer
of CVD-graphene to flexible substrates
Bongkyun Jang1,2, Chang-Hyun Kim1,3, Seung Tae Choi4, Kyung-Shik Kim1, Kwang-Seop
Kim1,3, Hak-Joo Lee1,5, Seung-Min Cho6, Jong-Hyun Ahn7, Jae-Hyun Kim1,3,∗
1Department of Nano Mechanics, Nano-Convergence Mechanical Systems Research
Division, Korea Institute of Machinery and Materials (KIMM), Daejeon 34103, Republic of
Korea
2Material Science Laboratory, Graduate School of Engineering, Department of Mechanical
Engineering and Science, Kyoto University, Kyoto 615-8540, Japan
3Nano Mechatronics, Korea University of Science and Technology (UST), Daejeon 34113,
Republic of Korea
4School of Mechanical Engineering, Chung-Ang University, Seoul 06974, Republic of Korea
5Center for Advanced Meta-Materials (CAMM), Daejeon 34103, Republic of Korea
6New Business Division, Hanhwa Techwin R&D Center, Gyeonggi-do 13488, Republic of
Korea
7School of Electrical and Electronic Engineering, Yonsei University, Seoul 03722, Republic
of Korea

*Corresponding Author : [email protected]
S1 Fabrication process of graphene transparent conductive films
Figure S1. Transfer process of CVD graphene synthesized on copper foil for a fabrication of
flexible transparent electrode.

S2. Temperature dependence on TRT-based graphene transfer process
Figure S2. (a) Temperature dependence of sheet resistance of transferred graphene onto PET
substrate. Inset figures are SEM images of TRT surface after transfer. (b) TRT residues on
graphene transferred on PET after transferring with the transfer temperature of 130 °C, and
(c) its corresponding surface morphologies of TRT film after heating.

S3 Control of nip force in roll to roll transfer machine
Figure S3. Nip forces, Fz1 and Fz2, measured by load sensors equipped in the both end of the
nip rolls (a) without control, (b) with control of nip force.

S4 Integrated control system for continuous roll to roll transfer of graphene
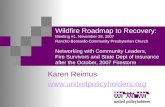
Figure S4. Force diagram of the roll transfer system with the two rollers and tension
measurement module between them.
Figure S4 shows a force diagram of the roll transfer system integrated with the force control
module. Films are continuously fed from the left side and pass through the first nip rolls,
tension control module, and the second nip rolls, step by step. Each roll pair composed of a
master roll (upper side) and a slave roll (bottom side). The axis of the master roll is fixed, but
the axis of the slave roll is connected with the translation stage in vertical direction to control
nip force uniformly by the load cells to measure the force of normal directions. The load cells
to measure the force of lateral directions, equipped in the axis of the slave roll, can detect
shear forces applied to the films. For convenience, the index of the first master roll, the first
slave roll, the second master roll, and the second slave roll is referred as M1, S1, M2, and S2,
respectively. When the system is stably controlled, the linear velocity is expressed as, v = R,
where R is a radius of rolls, and is an angular velocity of rolls. Here, it is possible to define
average linear velocity and relative linear velocity for each nip roll like,

v1,2=vM 1,2+vS 1,2
2= R
2 ( ωM 1,2+ωS1,2 ) ,∆ v1,2=vM 1,2−vS1,2=R ( ωM 1,2−ωS1,2 ) .
To establish a stable operation, tension is applied films fed to the system. Since nip rolls
isolate tensions, it is possible to consider the three tension values in the system, T1, T2, and T3.
T2 is directly measured with a tension load cell installed in the tension control module with
the relation of FT=2T 2sin θ. If the shear force applied between nip rolls is referred as FM1,
and FM2, the lateral forces are measured with x-axis load cell as,
F x 1=FM 1+T2−T1 ,F x 2=FM 2+T3−T2 .From this equation, the lateral forces are related with
tensions of the adjacent films with nip rolls, and the shear forces generated from nip rolls.
Generally, the shear force is dependent on the normal force and rotation velocity of the nip
rolls [S1]. So, the shear force also expressed as,
FM 1,2=μ F z1,2[1−(1−κ1,2Δv1,2
v1,2 )2] ,where
κ1,2=πGal
4 (1−ν ) μ F z1,2
.
Here, , G, , a, and l are frication coefficient, shear modulus, Poison’s ratio, and two sides
of rectangular contact area, respectively. This equation means that the shear forces of nip rolls
is correlated with the normal forces since friction force is large when the normal contact
pressure increases. Also, the difference of relative velocity causes an increase of the shear
force. So, the synchronization of nip rolls and the small normal force can minimize the shear
force. However, the current roll transfer system displayed in figure S4 includes two nip roll
pairs. Therefore, the integrated control system should be considered for a minimization of the
shear force.

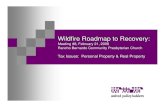
Figure S5. Force measured by each load cells and linear speed of the transfer machine. For
initial disturbances, the system is stably controlled after proceeding of 300 mm.

S5 High speed R2R transfer of graphene
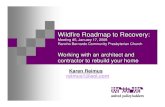
Figure S6. High speed transfer of graphene with tuned transfer parameters. (a) Control of nip
forces, lateral forces, and tension of the integrated system with a translation speed of 2000
mm/min. (b) Sheet resistance map of the transferred graphene at 2000 mm/min. (c)
Photograph of roll transfer process and (d) the transferred graphene on PET with a width of
500 mm. Higher speed transfer of graphene necessitates a fine tuning of transfer temperature,
nip force, lateral force and tension.

S6 Effects of synchronization between nip rolls
Figure S7. Rotational synchronization of nip rolls. (a) Schematics of synchronization test. (b)
Sheet resistance changes of the example case with synchronized setting and different velocity
setting of upper and lower roll. (c) Parallel wrinkles of graphene transferred on PET, which
is observed in extreme case of asynchronous rotation velocity. (d) Warpage of
TRT/graphene/PET structure laminated without synchronization of rotational velocity.

S7 Characterization of surface morphology
Figure S8. SEM images of (a) graphene on Cu foil and (b) graphene on the carrier film
(TRT).

Figure S9. SEM image and filtered images of graphene transferred on f the flexible substrate
(PET) for identify cracks and defects clearly.

S8 Mechanical properties for finite element analysis
Table S1. Young’s modulus and Poisson’s ratio of each material used in the analysis
Young’s modulus Poisson’s ratio
Graphene 1.0 TPa 0.165
PET 2.0 GPa 0.4
Rubber coating 6.06 MPa 0.5
TRT adhesive 20 kPa 0.5
Mechanical properties of graphene is estimated by density function theory simulation and is
proved by experiments [2, S2]. Young’s modulus of TRT adhesive is assumed as a modulus
measured by tensile test for conventional adhesive layer, which is similar types of TRT
adhesive [S3]. Also, the properties of PET and rubber coating of the rollers are measured by
uniaxial tensile test and hardness test, respectively.

S9 Deformation of adhesive layer calculated by finite element analysis
Figure S10. Strain distribution of an adhesive layer of a carrier film used in graphene transfer,
with respect to displacements. (a) Wavy-structured adhesive layer with graphene layer, and
(b) wavy structured adhesive layer without graphene layer.
To investigate deformations of adhesive in a carrier film during the transfer process, finite
element analysis is performed using commercial finite element method code, ABAQUS. The
adhesive layer with 60 μm thickness and wavy surface is compressed on the flat and rigid

substrate.
Figure S10 illustrates maximum principal strain distribution of the adhesive layer. The
adhesive layer without graphene layer deform and the contact region of it increase under
compression as shown Figure S10(b). Before fully contact state, δ = 180 nm, the crest start to
contact to the substrate and the adhesive largely deforms near it. After entire surface of the
adhesive fully contact with the substrate at δ = 182 nm, strain near the surface is under 0.1. In
addition, the wavy surface of the adhesive establish a conformal contact with the flat surface.
This result can explain the reason why the roughness of bare TRT increase after lamination
with graphene on Cu foil, and etching of Cu foil. When it comes to contact between rough
and rigid graphene on Cu, and relatively flat TRT, the adhesive of TRT largely deforms
viscoplastically and conform the surface of the graphene. After etching of Cu, the surface of
graphene on TRT resembles the surface of graphene on Cu foil.
However, when thin and stiff graphene layer is covered on the wavy surface of the adhesive
layer, the adhesive layer largely deform in local area compared to the surface without
graphene, as shown in figure S10(a). This is because the buckling of graphene layer on the
adhesive under the compression. Because of the mismatch of the modulus between the
adhesive and the graphene, relatively stiff graphene layer is buckled. Even though, high
normal stress is applied on the adhesive, the surface cannot fully contact with the flat
substrate. This buckling mechanism can explain the damage induced by normal stress in the
wavy structure of the adhesive.

S10 Lamination and transfer with small nip forces
During the lamination and transfer process in the R2R transfer of graphene, small nip forces
cause failures such as air bubbles and wrinkles. Figure S11 shows the photographs of those
failures obtained from the lamination process between a Cu foil and a TRT with small nip
forces. The air bubbles and wrinkles are mainly originated from the incomplete contact
between graphene and the target film. The incomplete contact is inevitable for small nip force
because of roundness error of the rollers and uneven thicknesses of TRT and the target film.
To make complete contact, it is necessary to increase the nip force. From the experimental
data, we found that the nip force per unit width should be larger than 3.27 N/mm for the
present case.
Figure S11. Air bubbles and wrinkles generated from the laminated films by R2R process
with small nip forces.

Reference
[S1] Stolarski, T. A. and Tobe, S. Rolling Contacts. (Professional Engineering Publishing
Limited, London, UK, 2000).
[S2] Zhou L, Wang Y, Cao G. 2013 Elastic properties of monolayer graphene with different
chiralities. J. Phys.: Condens. Matter. 25 125302
[S3] Murata A, Oshima T, Arimitsu Y and Kiuchi K 2010 Heat-peelable pressure-sensitive
adhesive sheet US Patent 7,718,257