GPR Data Acquisition and Interpretation · Seismic zonation and assessment. Tube detection in...
15
GPR Data Acquisition and Interpretation Mezgeen Rasol PhD Candidate Geophysics and Seismic Engineering Polytechnic University of Catalonia [email protected] BIG-SKY-EARTH Cost Action TD1403 Workshop Novi Sad, Serbia February 26 th -27 th , 2018 1 Copyrights © 2018 by Mezgeen Rasol
-
Upload
truongcong -
Category
Documents
-
view
222 -
download
0
Transcript of GPR Data Acquisition and Interpretation · Seismic zonation and assessment. Tube detection in...
GPR Data Acquisition and Interpretation
Mezgeen Rasol
PhD Candidate
Geophysics and Seismic Engineering
Polytechnic University of Catalonia
BIG-SKY-EARTH Cost Action TD1403 Workshop
Novi Sad, SerbiaFebruary 26th-27th, 2018
1
Copyrights © 2018 by Mezgeen Rasol
GPR Introduction
GPR Concept
GPR Applications
1st case study
2nd case study Outlines
2
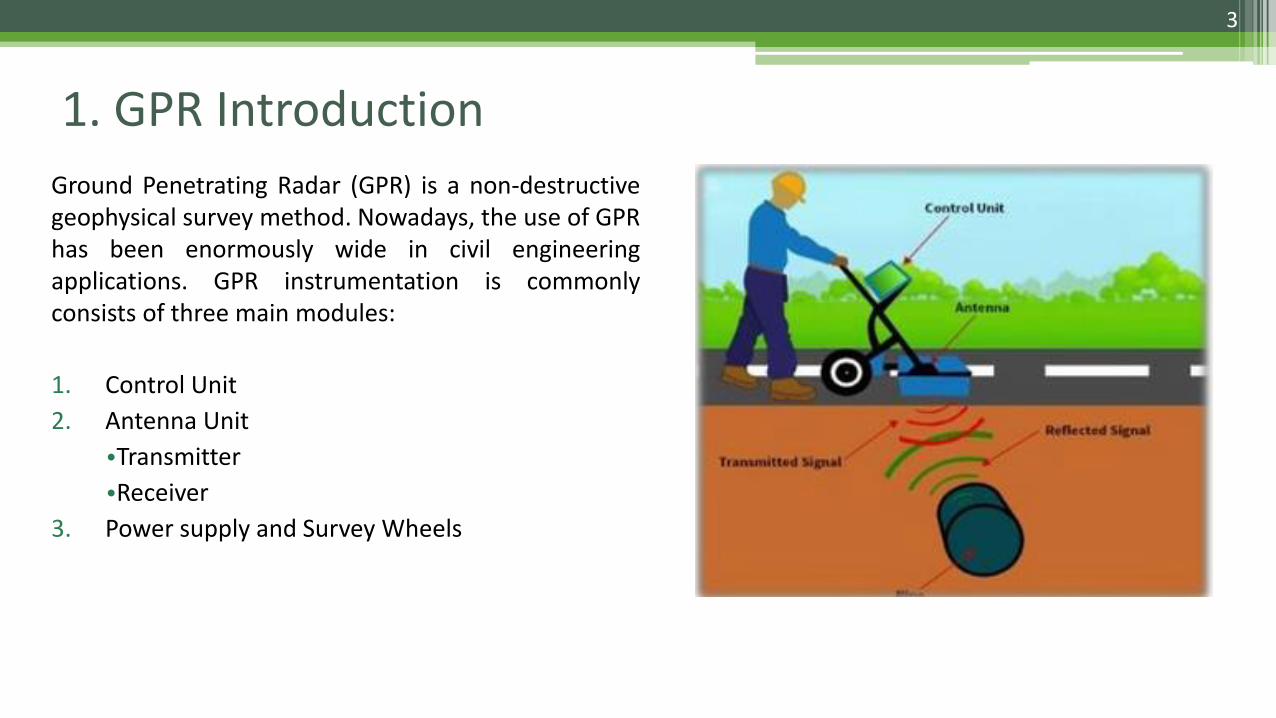
1. GPR Introduction
Ground Penetrating Radar (GPR) is a non-destructivegeophysical survey method. Nowadays, the use of GPRhas been enormously wide in civil engineeringapplications. GPR instrumentation is commonlyconsists of three main modules:
1. Control Unit
2. Antenna Unit
•Transmitter
•Receiver
3. Power supply and Survey Wheels
3
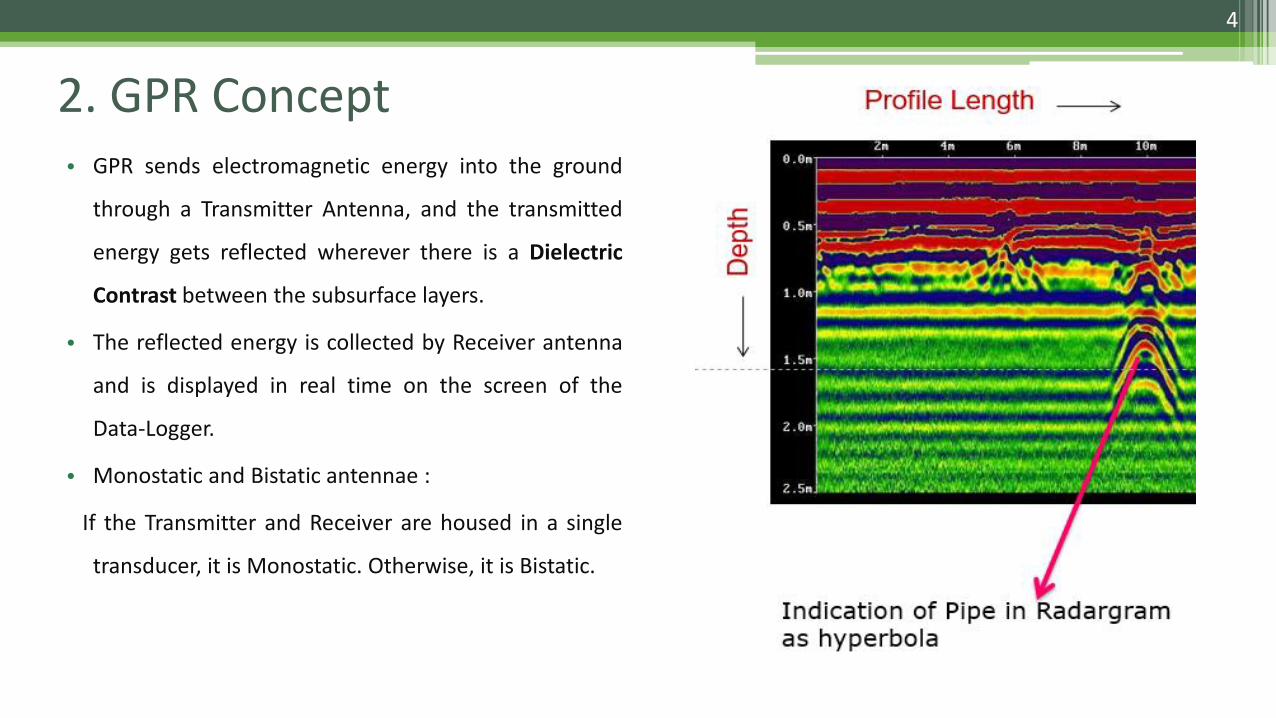
• GPR sends electromagnetic energy into the ground
through a Transmitter Antenna, and the transmitted
energy gets reflected wherever there is a Dielectric
Contrast between the subsurface layers.
• The reflected energy is collected by Receiver antenna
and is displayed in real time on the screen of the
Data-Logger.
• Monostatic and Bistatic antennae :
If the Transmitter and Receiver are housed in a single
transducer, it is Monostatic. Otherwise, it is Bistatic.
2. GPR Concept
Silty sandSand stone
Marine ss
Clay
Limestone
Shale
Limestone
Pipe
4
Field Applications
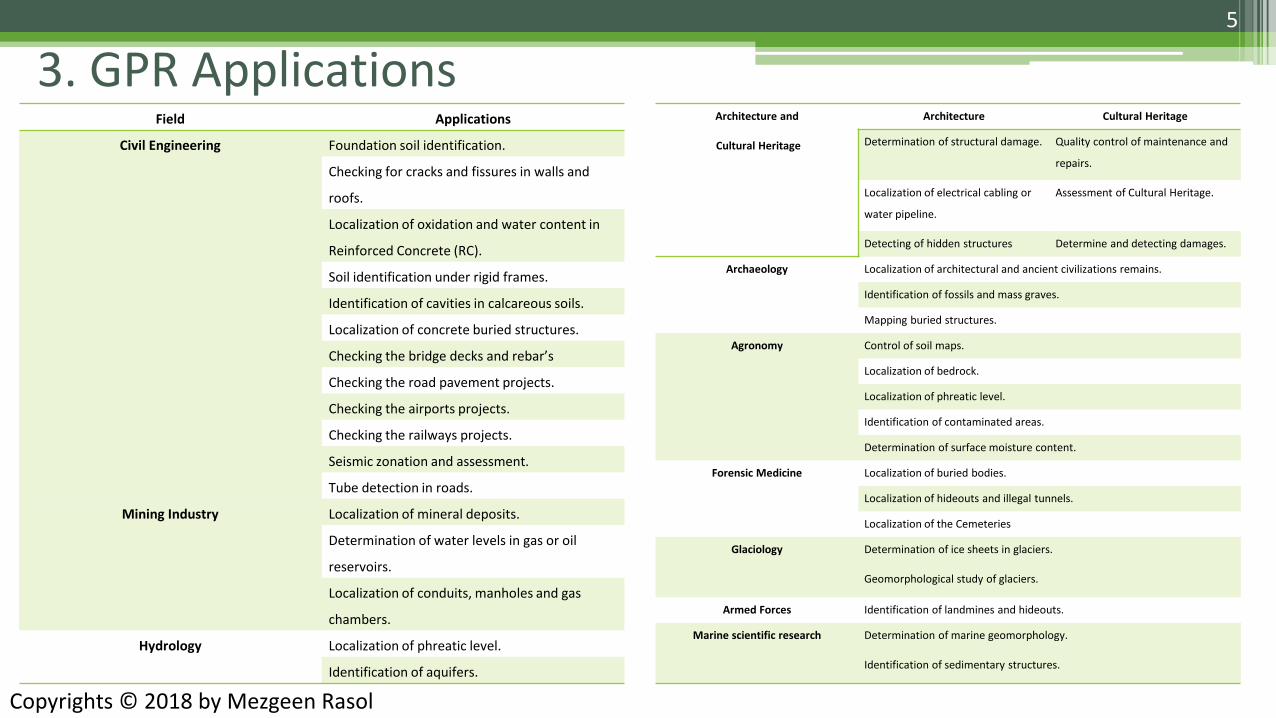
Civil Engineering Foundation soil identification.
Checking for cracks and fissures in walls and
roofs.
Localization of oxidation and water content in
Reinforced Concrete (RC).
Soil identification under rigid frames.
Identification of cavities in calcareous soils.
Localization of concrete buried structures.
Checking the bridge decks and rebar’s
Checking the road pavement projects.
Checking the airports projects.
Checking the railways projects.
Seismic zonation and assessment.
Tube detection in roads.
Mining Industry Localization of mineral deposits.
Determination of water levels in gas or oil
reservoirs.
Localization of conduits, manholes and gas
chambers.
Hydrology Localization of phreatic level.
Identification of aquifers.
Architecture and
Cultural Heritage
Architecture Cultural Heritage
Determination of structural damage. Quality control of maintenance and
repairs.
Localization of electrical cabling or
water pipeline.
Assessment of Cultural Heritage.
Detecting of hidden structures Determine and detecting damages.
Archaeology Localization of architectural and ancient civilizations remains.
Identification of fossils and mass graves.
Mapping buried structures.
Agronomy Control of soil maps.
Localization of bedrock.
Localization of phreatic level.
Identification of contaminated areas.
Determination of surface moisture content.
Forensic Medicine Localization of buried bodies.
Localization of hideouts and illegal tunnels.
Localization of the Cemeteries
Glaciology Determination of ice sheets in glaciers.
Geomorphological study of glaciers.
Armed Forces Identification of landmines and hideouts.
Marine scientific research Determination of marine geomorphology.
Identification of sedimentary structures.
3. GPR Applications 5
Copyrights © 2018 by Mezgeen Rasol
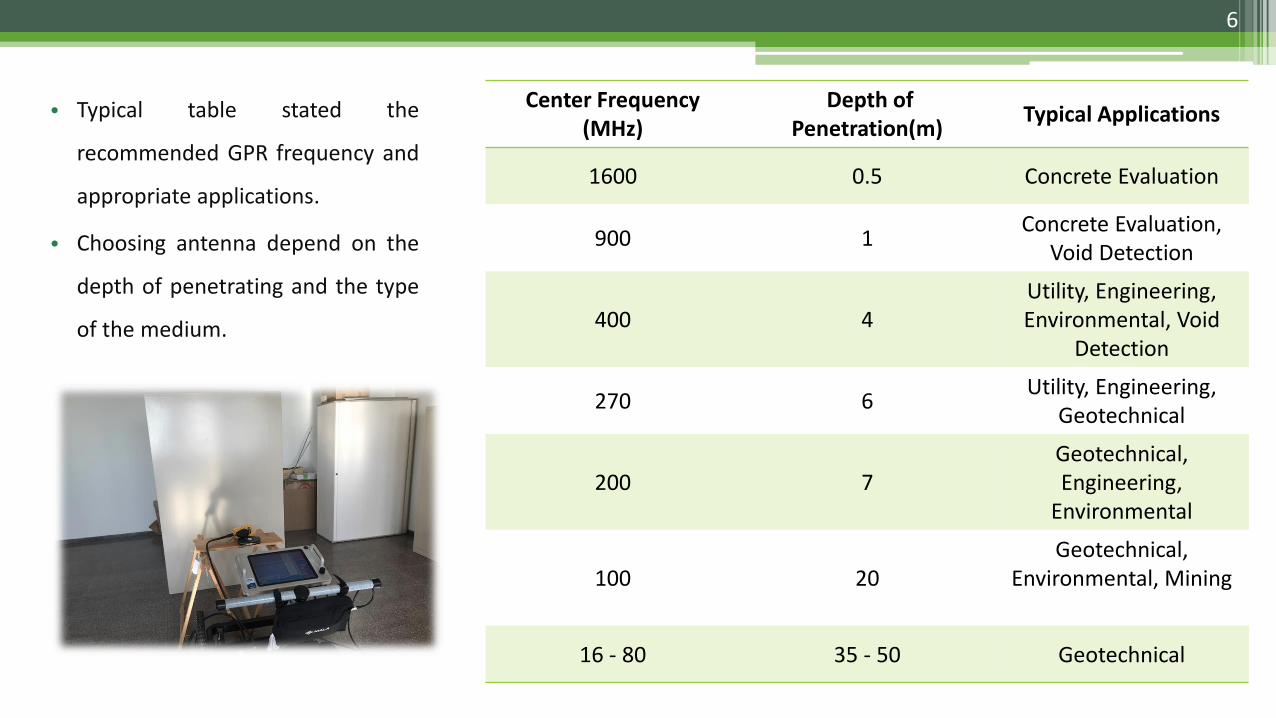
Center Frequency (MHz)
Depth of Penetration(m)
Typical Applications
1600 0.5 Concrete Evaluation
900 1Concrete Evaluation,
Void Detection
400 4Utility, Engineering, Environmental, Void
Detection
270 6Utility, Engineering,
Geotechnical
200 7Geotechnical, Engineering,
Environmental
100 20Geotechnical,
Environmental, Mining
16 - 80 35 - 50 Geotechnical
• Typical table stated the
recommended GPR frequency and
appropriate applications.
• Choosing antenna depend on the
depth of penetrating and the type
of the medium.
6
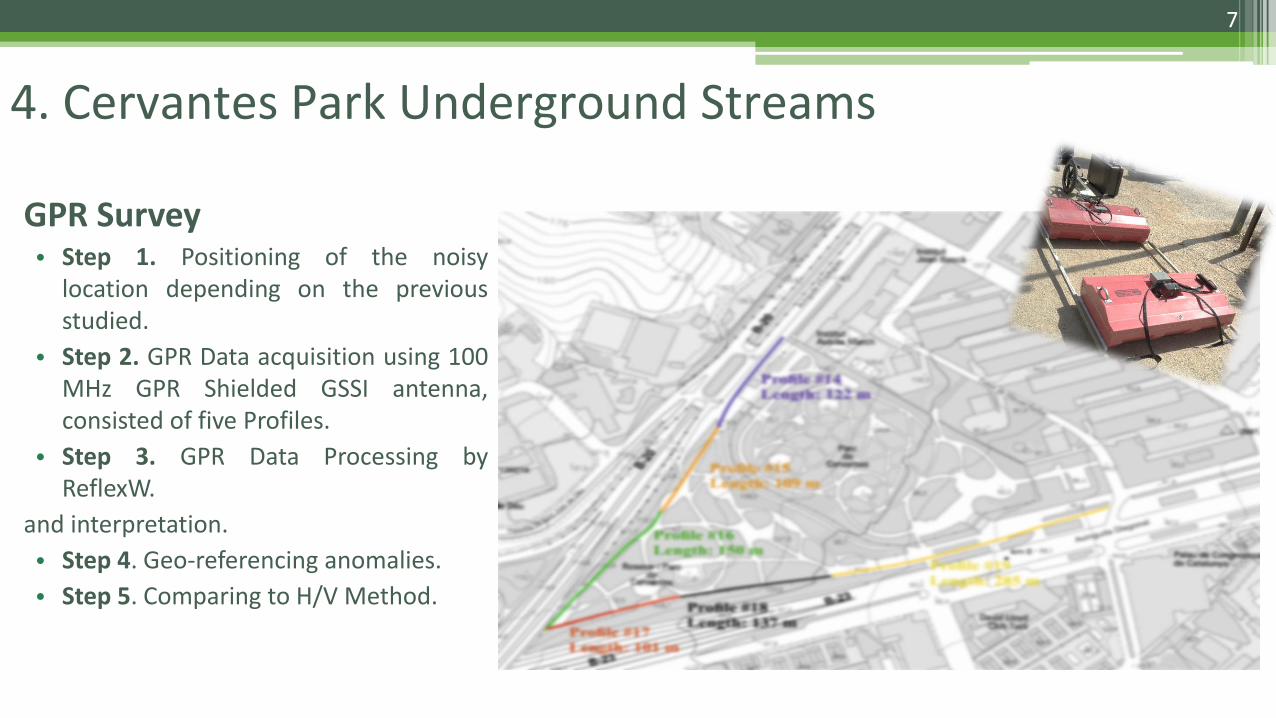
4. Cervantes Park Underground Streams
GPR Survey• Step 1. Positioning of the noisy
location depending on the previousstudied.
• Step 2. GPR Data acquisition using 100MHz GPR Shielded GSSI antenna,consisted of five Profiles.
• Step 3. GPR Data Processing byReflexW.
and interpretation.
• Step 4. Geo-referencing anomalies.
• Step 5. Comparing to H/V Method.
7
8
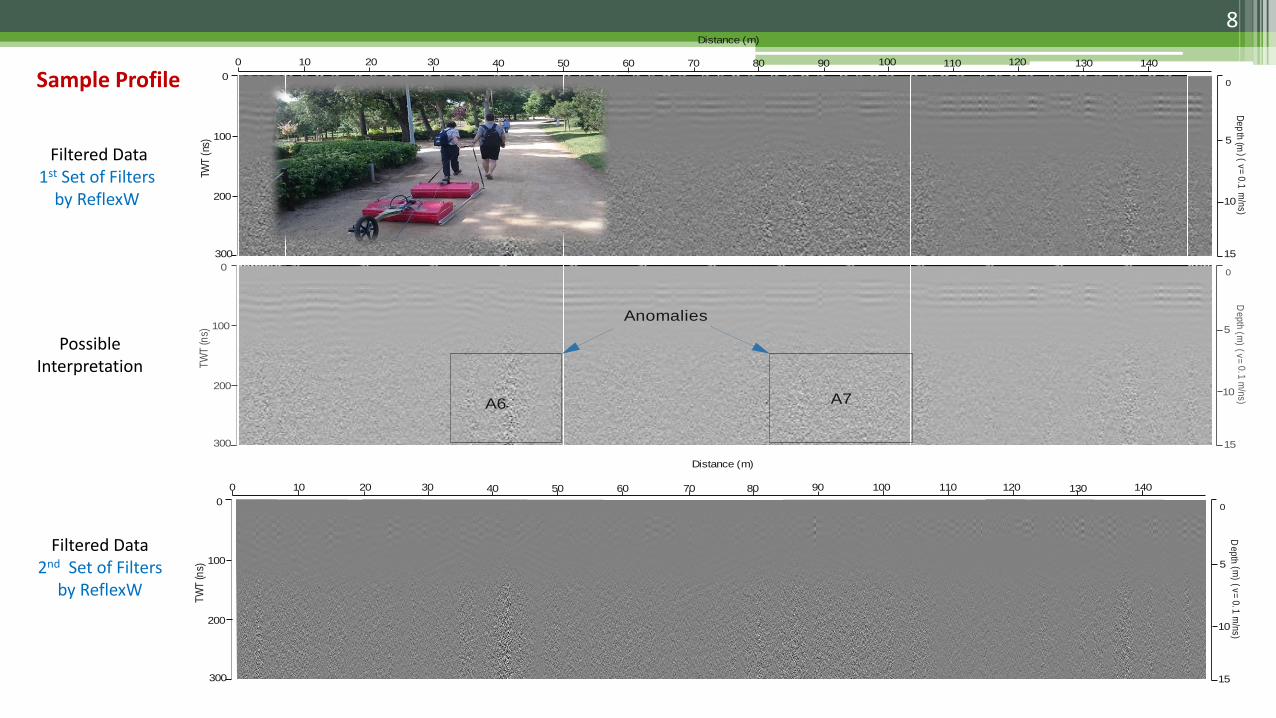
Sample Profile
10
15
5
De
pth
(m) ( v
= 0
.1 m
/ns
)Distance ( )m
300
200
100
TWT
(ns
)
0 0
130 140110 1201009080706050403020100
10
15
5
De
pth
(m) ( v
= 0
.1 m
/ns
)
300
200
100
TW
T (n
s)
0 0
A6 A7
Anomalies
10
15
5
De
pth
(m) ( v
= 0
.1 m
/ns
)
Distance ( )m
300
200
100
TW
T (n
s)
0 0
130 140110 1201009080706050403020100
Filtered Data1st Set of Filters
by ReflexW
Possible Interpretation
Filtered Data2nd Set of Filters
by ReflexW
9
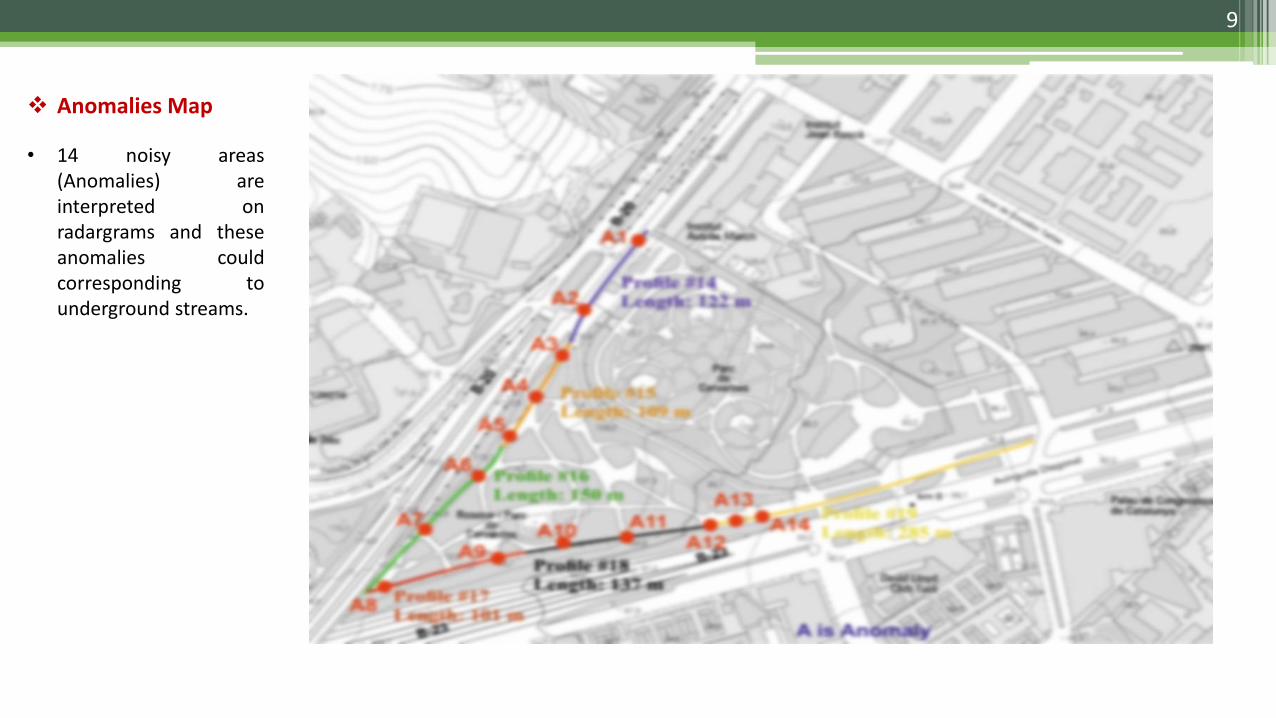
❖ Anomalies Map
• 14 noisy areas(Anomalies) areinterpreted onradargrams and theseanomalies couldcorresponding tounderground streams.
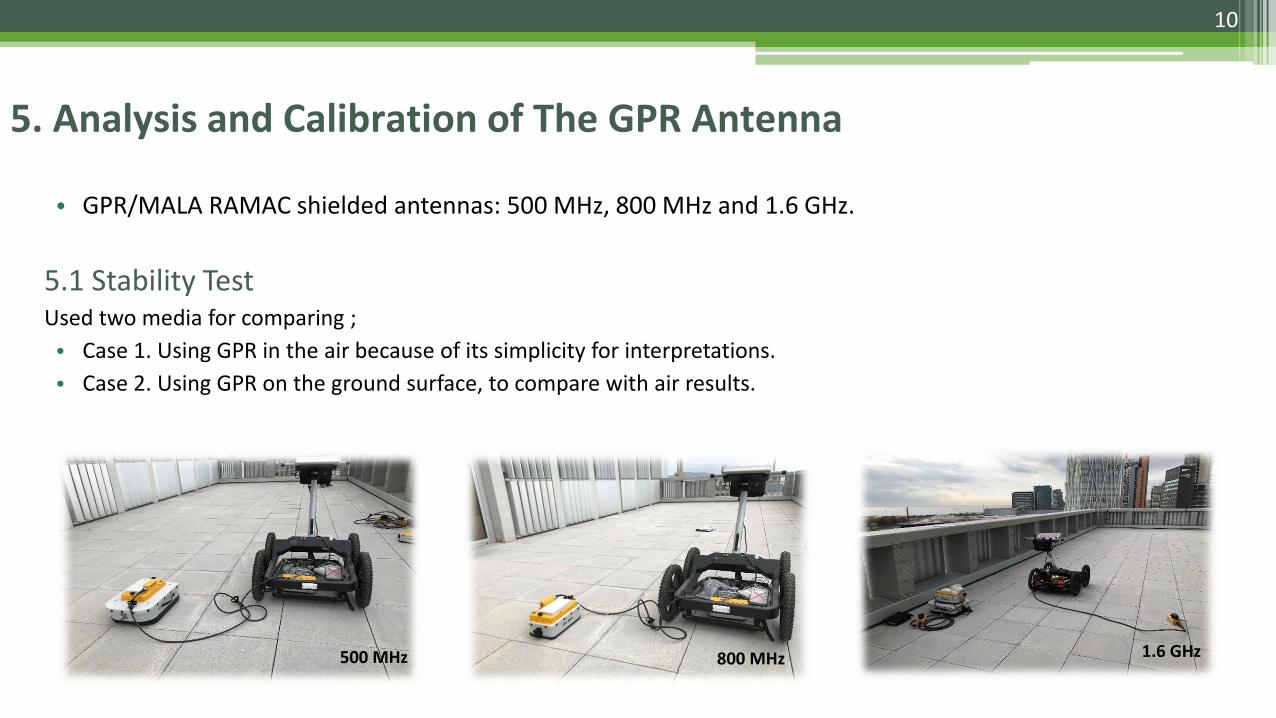
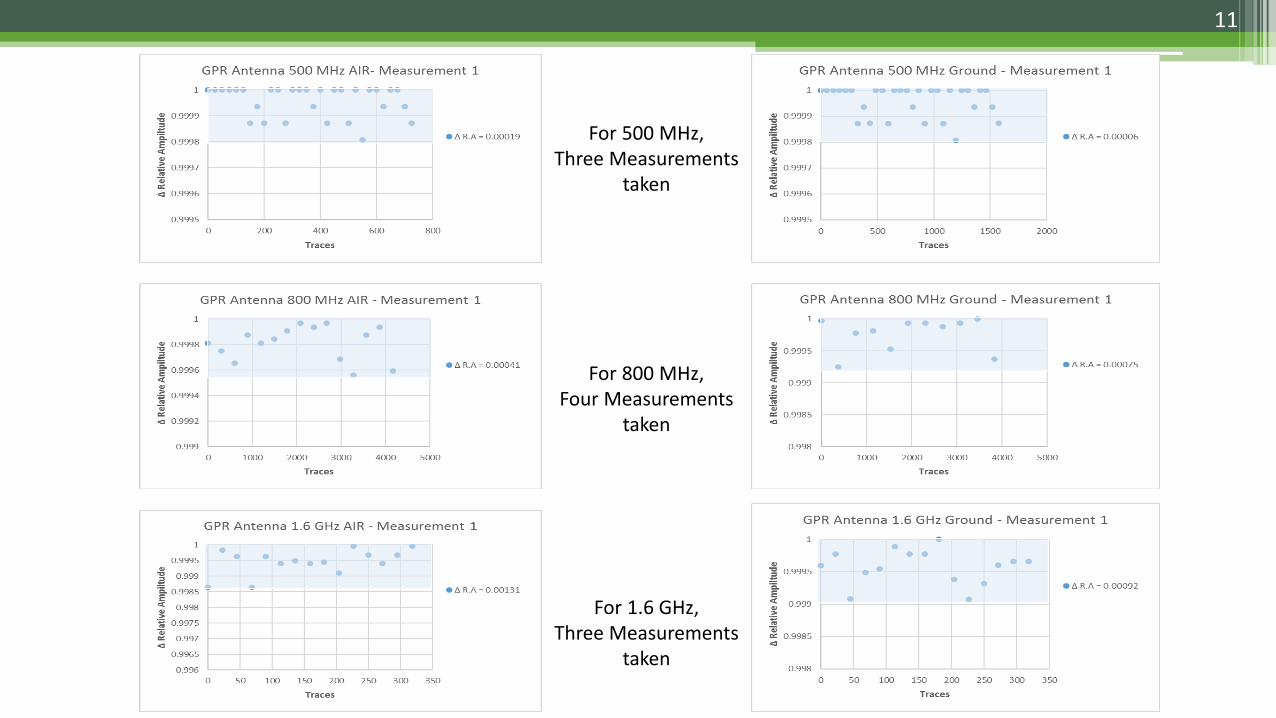
5. Analysis and Calibration of The GPR Antenna
• GPR/MALA RAMAC shielded antennas: 500 MHz, 800 MHz and 1.6 GHz.
5.1 Stability Test Used two media for comparing ;
• Case 1. Using GPR in the air because of its simplicity for interpretations.
• Case 2. Using GPR on the ground surface, to compare with air results.
10
500 MHz 800 MHz 1.6 GHz
11
For 500 MHz, Three Measurements
taken
For 800 MHz, Four Measurements
taken
For 1.6 GHz, Three Measurements
taken
12
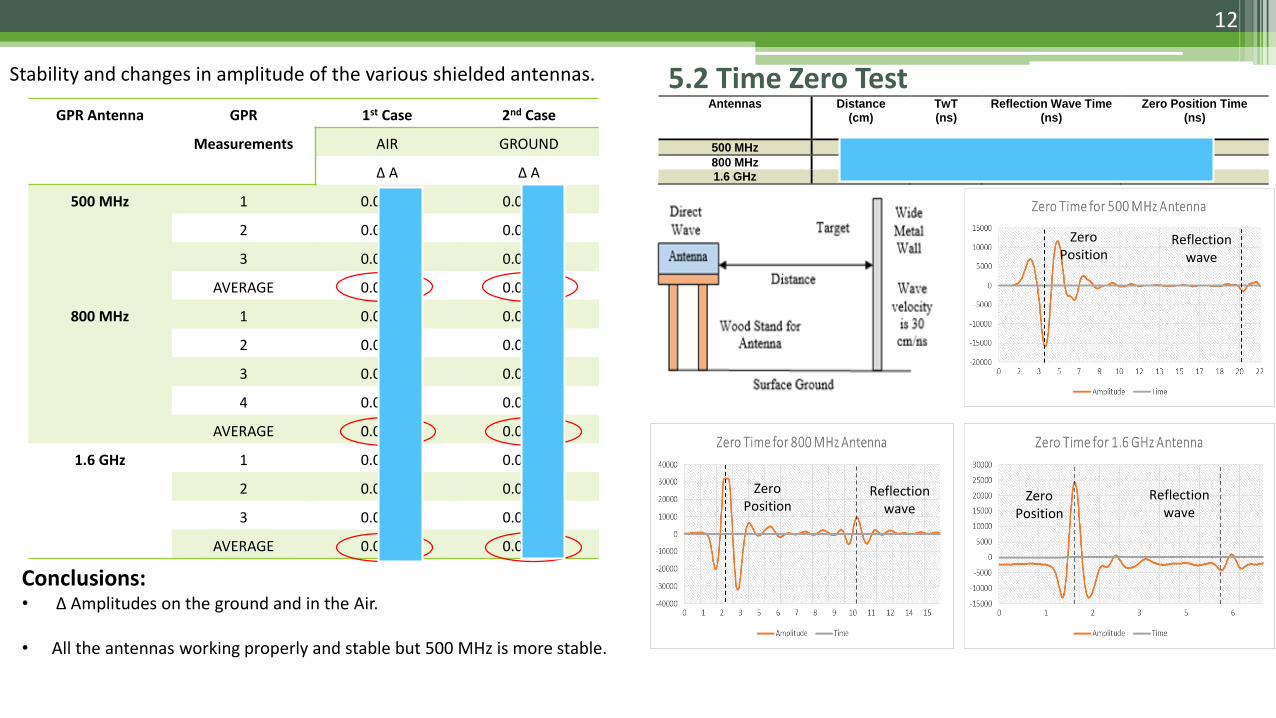
GPR Antenna GPR
Measurements
1st Case 2nd Case
AIR GROUND
Δ A Δ A
500 MHz 1 0.00019 0.00006
2 0.00013 0.00016
3 0.00019 0.00009
AVERAGE 0.00017 0.00010
800 MHz 1 0.00041 0.00075
2 0.00081 0.00125
3 0.00109 0.00041
4 0.00050 0.00025
AVERAGE 0.00070 0.00066
1.6 GHz 1 0.00131 0.00092
2 0.00417 0.00188
3 0.00246 0.00665
AVERAGE 0.00265 0.00315
Stability and changes in amplitude of the various shielded antennas. 5.2 Time Zero Test Antennas Distance
(cm)
TwT (ns)
Reflection Wave Time (ns)
Zero Position Time (ns)
500 MHz 240 16 20 4
800 MHz 120 8 10 2 1.6 GHz 60 4 5.5 1.5
Zero Position
Reflectionwave
Zero Position
Zero Position
Reflectionwave
Reflectionwave
Conclusions:• Δ Amplitudes on the ground and in the Air.
• All the antennas working properly and stable but 500 MHz is more stable.
13
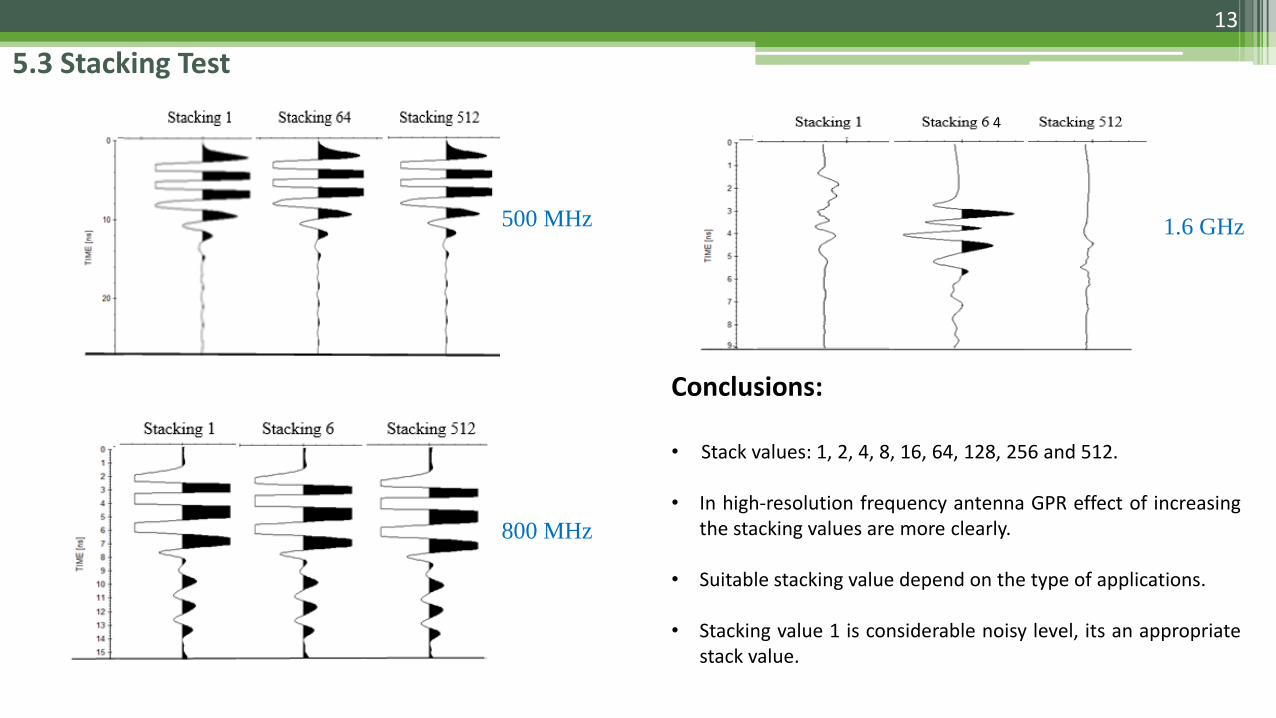
5.3 Stacking Test
500 MHz
800 MHz
1.6 GHz
Conclusions:
• Stack values: 1, 2, 4, 8, 16, 64, 128, 256 and 512.
• In high-resolution frequency antenna GPR effect of increasingthe stacking values are more clearly.
• Suitable stacking value depend on the type of applications.
• Stacking value 1 is considerable noisy level, its an appropriatestack value.
4
14
[1] Joachim Ender. 98 Years of the RADAR Principle: The Inventor Christian Hülsmeyer. EUSAR 2002
[2] Kozlovsky, E.A. (ed), 1989. Encyclopaedia of Mining (in Russian). Ed. Sovietic Encyclopaedia. 4, 285-286.
[3] Finkelshtein, M.I., Kutev, V.A., Zolotared, V.P., 1986. Applications of ground penetrating radar in geological engineering (inRussian). Ed. Nedra. Moscow.
[4] http://www.radarworld.org/huelsmeyer.html.
[5]http://www.ieeeghn.org/wiki/index.php/Radar_during_World_War_II#Radar_during_World_War_II (access: 2014/05/26).
[6] HULSENBECK et al.: German Pat. No. 489434, 1926
[7] STEENSON, B. 0.: 'Radar methods for the exploration of glaciers'. PhD Thesis, Calif. Inst. Tech., Pasadena, CA, USA, 1951
References
Many Thanks for your attention
15