Governing Elastic IoT Cloud Systems under Uncertainties
17
Governing Elastic IoT Cloud Systems under Uncertainties Stefan Nastic, Georgiana Copil, Hong-Linh Truong , Schahram Dustdar Distributed Systems Group, TU Wien [email protected] dsg.tuwien.ac.at/staff/truong CloudCom 2015, 1 Dec 2015, Vancouver, Canada 1
-
Upload
hong-linh-truong -
Category
Education
-
view
377 -
download
0
Transcript of Governing Elastic IoT Cloud Systems under Uncertainties

Governing Elastic IoT Cloud Systems under Uncertainties
Stefan Nastic, Georgiana Copil, Hong-Linh Truong, Schahram Dustdar
Distributed Systems Group, TU Wien
[email protected] dsg.tuwien.ac.at/staff/truong
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 1

Outline
§ IoT Cloud Systems & Motivation § IoT Cloud Uncertainties § Specifying uncertainties in governance
processes § Actuation under uncertainties § Experiments § Conclusions and future work
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 2

Motivation
§ IoT Cloud Systems/CPS: blending IoT elements and cloud services for complex applications/services
§ We need to coordinate both IoT elements and cloud services at the same time
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 3
Hong Linh Truong, Schahram Dustdar: Principles for Engineering IoT Cloud Systems. IEEE Cloud Computing 2(2): 68-76 (2015) https://github.com/tuwiendsg/COMOT4U/blob/master/models/IoTCloudSystem http://tuwiendsg.github.io/iCOMOT/
Motivation
§ Management and coordination of IoT elements and cloud services § Emerging novel aspects related to infrastructure
data, elasticity control and governance of policies § Challenges
§ Which types of uncertainties are in IoT cloud system infrastructures? § Important for infrastructure and state management
§ How to govern IoT cloud systems under such uncertainties? § Which elements should be governed and how to carry out
management operations considering uncertainties?
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 4

IoT Cloud Infrastructure Uncertainty Taxonomy
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 5
Infrastructure uncertainties
Nonfunctional dimensionality
Functional dimensionality
Execution environment
Storage
Data delivery
Actuation
Elasticity
Governance
Locality
Platform(virtual infrastructure
layer)
Hardware
Temporal manifestation
Persistent
Recurring
SporadicEffect
propagation
Application
Physical environment
External to infrastructure
Observation time
Deployment time
Runtime
Cause
Human action
Natural phenomenon
Quality
Compliance
Dependability
Technological
Human
Composite Function
Further check: • https://github.com/tuwiendsg/COMOT4U/blob/master/docs/u-taxonomy.pdf • www.u-test.eu

Uncertainties due to Data Quality and Actuation Dependability
§ Data needed for governance § Status of IoT cloud systems
infrastructure elements: availability, operational capabilities, etc.
§ Meta-data about infrastructure elements: location, type of gateways, owners, etc.
§ Actuation operation: failed, delay, side-effects
§ DataQualityUncertainties: about monitoring data/infrastructure state
§ ActuationDependabilityUncertainties
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 6
Governance
DataDeliveryUncertainty
InfrastructureUncertainty
GovernanceUncertainty
GovernanceProcessExecutionUncertainty
ActuationUncertainty
ExecutionEnvironmentUncertainty
RuntimeExecutionEnvironmentUncertainty

U-Govops architecture
Key contributions: governance policy specification and governance enforcement considering uncertainties
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 7
Prototype: https://github.com/tuwiendsg/COMOT4U/tree/master/uGovOps
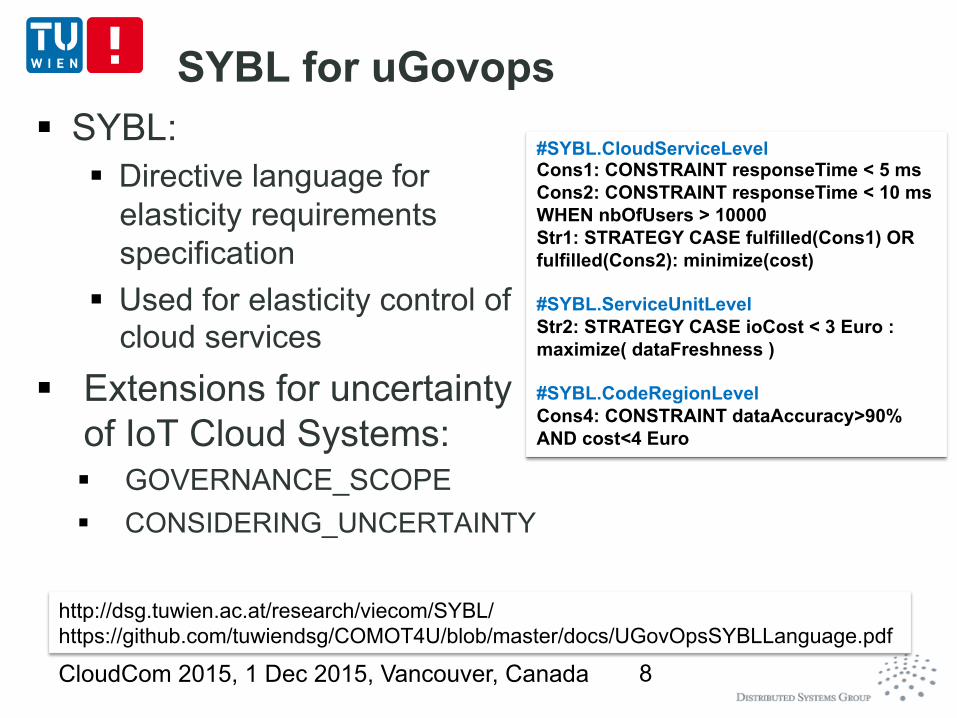
SYBL for uGovops § SYBL:
§ Directive language for elasticity requirements specification
§ Used for elasticity control of cloud services
§ Extensions for uncertainty of IoT Cloud Systems: § GOVERNANCE_SCOPE § CONSIDERING_UNCERTAINTY
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 8
http://dsg.tuwien.ac.at/research/viecom/SYBL/ https://github.com/tuwiendsg/COMOT4U/blob/master/docs/UGovOpsSYBLLanguage.pdf
#SYBL.CloudServiceLevel Cons1: CONSTRAINT responseTime < 5 ms Cons2: CONSTRAINT responseTime < 10 ms WHEN nbOfUsers > 10000 Str1: STRATEGY CASE fulfilled(Cons1) OR fulfilled(Cons2): minimize(cost) #SYBL.ServiceUnitLevel Str2: STRATEGY CASE ioCost < 3 Euro : maximize( dataFreshness ) #SYBL.CodeRegionLevel Cons4: CONSTRAINT dataAccuracy>90% AND cost<4 Euro

Specifying uncertainties in governance processes
§ Describe scopes in which governance processes will be applied
§ Rough set logics to compute an objective approximation of governance scopes for dealing with missing data
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 9
G:GOVERNANCE_SCOPE query:= location=buildingX & type=JACE-545 CONSIDERING_UNCERTAINTY: missing_data = "location<=’?’,type<=’*’" AND selection_strategy = optimistic AND use_cache = false
S:STRATEGY CASE Fulfilled (CND1): setUpdateRate(5s) FOR G CONSIDERING_UNCERTAINTY: Run_in_isolation = true AND Keep_alive = 5min AND Degree_parallelism = 200 AND Tolerate_fault_percentage = 20% AND Fallback_count = 2 AND Time_to_next_fallback = 500ms
§ The elasticity control strategies work in specific governance scopes & considering additional uncertainty parameters

Resolving rough governance scopes
§ Determine similar resources, under attributes G with missing information, by considering problem-dependent uncertainty parametrization
§ Based on the specified
selection_strategy the U-GovOps returns a governance scope
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 10

Dealing with actuations under uncertainties
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 11

Experiments
§ Emulating an IoT Cloud System in the scenario § Infrastructures
§ Using Docker (~ 1000 docker containers) and CentOS § https://hub.docker.com/r/dsgtuwien/govops-box/
§ U-GovOps: 4 Ubuntu VMs
§ Emulating § Missing or incomplete data § Actuation uncertainties § Using Dell Blockage tools to perform random fault
injection
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 12

Evaluation governance scopes under missing data
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 13
G1: GOVERNANCE_SCOPE query: location=building3&type=JACE-545||owner=TUW CONSIDERING_UNCERTAINTY: missing_data =location<=’?’, owner<=’*’ AND selection_strategy =optimistic; M1: MONITORING abnormal_behavior := sensorAlert(G1)==true OR heartBeatAVG(G1)>5min; S1: STRATEGY CASE abnormal_behavior: setProtocol(’mqtt’), changeUpdateRate(’5s’) FOR G1 CONSIDERING_UNCERTAINTY: running_inisolation =true AND keep_alive=1min AND fallback_count =2 AND tolerate_fault_percentage= 20% AND invocation_caching =true; C1: CONSTRAINT cost<200 CONSIDERING_UNCERTAINTY: decision_confidence >=20%; S2: STRATEGY CASE responseTime>250ms: scaleOut() CONSIDERING_UNCERTAINTY: …
F1 score for test accuracy • Controlled
experiments • 50 reruns

Error rates for governance scopes due to missing data
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 14
The operator can make trade-offs by selecting appropriate strategies for their specific purpose

Lost actuations rates for isolated actuations
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 15
Performance and additional cost must be paid for uncertainty management

Conclusions and Future Work § IoT cloud systems have complex types of
uncertainties that must be taken into account § Our uGovOps supports uncertainties in IoT cloud
management and engineering analytics § Language specification and enforcement § Runtime management foundations
§ Future work § Substantial improvement of uncertainty runtime
governance § Support new types of uncertainties § Incorporation of knowledge from uncertainty testing
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 16

Thanks for your attention!
Hong-Linh Truong Distributed Systems Group TU Wien dsg.tuwien.ac.at/staff/truong
CloudCom 2015, 1 Dec 2015, Vancouver, Canada 17