GNSS Navigation in Di cult Environments: Hybridization and...
198
UNIVERSITA’ DEGLI STUDI DI NAPOLI ”PARTHENOPE” SCUOLA DI DOTTORATO Dottorato in Scienze Geodetiche e Topografiche XXVI Ciclo Tesi di Dottorato GNSS Navigation in Difficult Environments: Hybridization and Reliability Ciro Gioia Tutore Coordinatore del corso di dottorato Prof. Salvatore Gaglione Prof. Lorenzo Turturici Supervisore Aziendale PhD. Daniele Borio Aprile 2014
Transcript of GNSS Navigation in Di cult Environments: Hybridization and...

UNIVERSITA’ DEGLI STUDI DI NAPOLI
”PARTHENOPE”
SCUOLA DI DOTTORATO
Dottorato in Scienze Geodetiche e Topografiche XXVI Ciclo
Tesi di Dottorato
GNSS Navigation in DifficultEnvironments: Hybridization and
Reliability
Ciro Gioia
Tutore Coordinatore del corso di dottoratoProf. Salvatore Gaglione Prof. Lorenzo Turturici
Supervisore Aziendale
PhD. Daniele Borio
Aprile 2014

Contents
1 Introduction 31.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Previous Work and Limitations . . . . . . . . . . . . . . . . . . . . . 91.3 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.4 Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2 Principles of Satellite Navigation 172.1 GNSS Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1.1 GNSS Structure . . . . . . . . . . . . . . . . . . . . . . . . . . 182.1.2 GNSS Observables . . . . . . . . . . . . . . . . . . . . . . . . 212.1.3 GNSS Errors . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2 Navigation Solution Estimation . . . . . . . . . . . . . . . . . . . . . 282.2.1 Estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.2.2 Least Squares Method . . . . . . . . . . . . . . . . . . . . . . 302.2.3 Position Computation using Pseudorange . . . . . . . . . . . . 312.2.4 Velocity Computation using Doppler measurements . . . . . . 342.2.5 PVT Algorithms . . . . . . . . . . . . . . . . . . . . . . . . . 362.2.6 Geometrical Aspects . . . . . . . . . . . . . . . . . . . . . . . 40
2.3 Reliability Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.3.1 Traditional RAIM . . . . . . . . . . . . . . . . . . . . . . . . . 442.3.2 Reliability Testing (Global Test, Local Test) . . . . . . . . . . 472.3.3 Statistical Reliability (Internal Reliability, External Reliability) 49
2.4 Fault Detection and Exclusion . . . . . . . . . . . . . . . . . . . . . 502.4.1 Geometry and Correlation check . . . . . . . . . . . . . . . . . 512.4.2 Observation Subset Testing . . . . . . . . . . . . . . . . . . . 542.4.3 Forward-Backward . . . . . . . . . . . . . . . . . . . . . . . . 562.4.4 The Danish Method . . . . . . . . . . . . . . . . . . . . . . . 57
2.5 Multi-constellation navigation and GNSS extension . . . . . . . . . . 592.5.1 Multi-constellation navigation (GLONASS and Galileo) . . . . 612.5.2 GNSS Augmentation . . . . . . . . . . . . . . . . . . . . . . . 642.5.3 Local GNSS augmentation: pseudolites . . . . . . . . . . . . 65
ii

3 GNSS Navigation: the multi-constellation opportunity 693.1 GPS Galileo multi-constellation . . . . . . . . . . . . . . . . . . . . . 69
3.1.1 Galielo measurements analysis . . . . . . . . . . . . . . . . . . 703.1.2 Galileo only positioning performance first PVT . . . . . . . . 803.1.3 GPS/Galileo multi-constellation opportunity . . . . . . . . . . 893.1.4 Main results . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.2 Urban Navigation multi-constellation opportunity GPS/GLONASS . 933.2.1 GPS/GLONASS multi-constellation . . . . . . . . . . . . . . 963.2.2 Main results . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
4 Pseudolite Positioning 1034.1 Synchronous pseudolite navigation . . . . . . . . . . . . . . . . . . . 103
4.1.1 Double Differences Approach . . . . . . . . . . . . . . . . . . 1064.1.2 Simulated Approach . . . . . . . . . . . . . . . . . . . . . . . 110
4.2 Asynchronous RSSI Positioning . . . . . . . . . . . . . . . . . . . . . 115
5 Results - Testing and Analysis 1195.1 Urban Tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
5.1.1 Static Campaign . . . . . . . . . . . . . . . . . . . . . . . . . 1205.1.2 Kinematic Test . . . . . . . . . . . . . . . . . . . . . . . . . . 1355.1.3 High Sensitivity solution . . . . . . . . . . . . . . . . . . . . . 1425.1.4 Main results for the urban scenarios . . . . . . . . . . . . . . . 145
5.2 Indoor Tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1465.2.1 Indoor High Sensitivity solution . . . . . . . . . . . . . . . . . 1465.2.2 Indoor navigation asynchronous pseudolite solution, control
point test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1495.2.3 Calibration Stage for the corridor test . . . . . . . . . . . . . . 1525.2.4 Corridor test: results . . . . . . . . . . . . . . . . . . . . . . 1545.2.5 Indoor navigation using asynchronous pseudolite system, re-
peatability test . . . . . . . . . . . . . . . . . . . . . . . . . . 1575.2.6 Calibration Stage for repeatability test . . . . . . . . . . . . . 1585.2.7 Repeatability test results analysis . . . . . . . . . . . . . . . . 161
6 Conclusions and future work 1696.1 Main results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1706.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Bibliography 175
iii

List of Figures
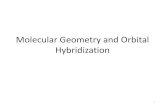
1.1 Flow chart of the thesis . . . . . . . . . . . . . . . . . . . . . . . . . . 15
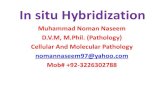
2.1 GPS Ground Control Segment (GCS), available at gps.gov . . . . . . 18
2.2 Orbital error component . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.3 GNSS Error Sources . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.4 ENU frame, the origin is arbitrarily fixed to a point on the Earthsurface; the X-axis points toward the East; the Y-axis points towardthe North; the Z-axis points upward along the ellipsoid normal . . . . 32
2.5 Position Algorithm Flow Chart . . . . . . . . . . . . . . . . . . . . . 37
2.6 Velocity algorithm work flaw . . . . . . . . . . . . . . . . . . . . . . . 40
2.7 Type I Error α and Type II Error β in an One Tailed Test . . . . . . 43
2.8 Horizontal and Vertical Protection Level . . . . . . . . . . . . . . . . 45
2.9 Non-Central Chi-Square Density Functions in Global Testing . . . . . 47
2.10 Density Function of the normalized residual in the Local Test . . . . 49
2.11 Slope geometric interpretation . . . . . . . . . . . . . . . . . . . . . . 53
2.12 ARP geometric interpretation . . . . . . . . . . . . . . . . . . . . . . 54
2.13 Subset Testing workflow . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.14 Forward Backward workflow . . . . . . . . . . . . . . . . . . . . . . . 57
2.15 Danish method workflow . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.16 The navigation gap from [1] . . . . . . . . . . . . . . . . . . . . . . . 66
2.17 Schematic representation of the proximity principle adopted by theIMES navigation system. The receiver estimates its position as theposition of the closest transmitter. From [2] . . . . . . . . . . . . . . 68
3.1 Equipment used to collect GPS and Galileo observables, Septen-trio PolarRxS receiver [3] and Javad RingAnt-G3T [4] placed on therooftop of the European Microwave Signature Laboratory (EMSL) inthe Joint Research Centre (JRC) premises in Ispra. . . . . . . . . . . 71
3.2 Schematic representation of the algorithm developed for determiningPR and PR-rate residual errors . . . . . . . . . . . . . . . . . . . . . 72
iv

3.3 Mean and the standard deviation of Galileo PR errors as a functionof satellite elevation and of Carrier-to-Noise power spectral densityratio (C/N0). The error decreases when satellite elevation and C/N0
increase. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.4 Mean and the standard deviation of Galileo PR-rate errors as a func-tion of satellite elevation and of C/N0. The error decreases whensatellite elevation and C/N0 increase. . . . . . . . . . . . . . . . . . . 75
3.5 Galileo E1 SD error as a function of C/N0 . . . . . . . . . . . . . . . 76
3.6 Mean and the standard deviation of Galileo (E1BC) and GPS (L1)PR errors as a function of satellite elevation and of C/N0. Galileoerror parameters are almost halved with respect to GPS. . . . . . . . 77
3.7 Mean and the standard deviation of Galileo (E1BC) and GPS (L1)PR-rate errors as a function of satellite elevation and of C/N0. Thetwo systems has similar performance, Galileo improvements in termof PR-rate are less evident than in PR case. . . . . . . . . . . . . . . 77
3.8 Mean and Standard Deviation of Galileo (E1BC) and (E5a) PR er-rors as a function of satellite elevation and of C/N0. A performancedegradation is observed in the Galileo E5a measurements, this degra-dation was not expected but a similar phenomenon was observed forGIOVE measurements. . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3.9 Mean and the standard deviation of Galileo (E1BC) and (E5a) PRerrors as a function of satellite elevation and of C/N0. The PR-rateerrors obtained from the two frequencies are characterized by similarperformance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.10 Galileo PR error distribution, the measurements have Gaussian dis-tribution centered araund zero. . . . . . . . . . . . . . . . . . . . . . 80
3.11 Horizontal position errors of the Galileo only positioning, using E1and E5a measurements. The clouds are very similar: slight improve-ments can be noted when Galileo E1BC measurements are used con-firming the results obtained in the measurement domain. . . . . . . . 81
3.12 Vertical position error of the Galileo only positioning, using E1 andE5a measurements, as a function of time. The two lines are very close,only slight differences can be noted confirming the results obtainedin the horizontal plane. . . . . . . . . . . . . . . . . . . . . . . . . . . 85
3.13 Horizontal position error of the Galileo only and and GPS (with alimited DOP). The Galileo cloud is significantly reduced with respectto the GPS one. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.14 Galileo (E1bc) and GPS (with a limited DOP) horizontal positionerror (upper box), HDOP values (middle box) and HDOP differences(lower box) as a function of the time epoch. . . . . . . . . . . . . . . 86
v

3.15 Horizontal position errors for Galileo Iono-free combination. The so-lutions are centered around the true position and a linear trend isobserved due to the poor geometry as in the single frequency cases . . 87
3.16 Horizontal position error as a function of the time epoch for GalileoE1BC, E5a and Iono-free configuration (upper box). Horizontal posi-tion error as a function of the time epoch for Galileo E1BC, E5a andIono-free configuration (lower box) . . . . . . . . . . . . . . . . . . . 87
3.17 Galileo (E1BC) and GPS horizontal velocity error as a funciton ofthe time epoch. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3.18 Vertical velocity errors as a function of the time epoch, for GPSGalileo E1BC and Galileo E5a configurations. . . . . . . . . . . . . . 88
3.19 Schematic representation of the algorithm developed for determin-ing position and velocity errors using multi-constellation GPS/Galileomeasurements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
3.20 GPS and GPS/Galileo horizontal position error as a function of thetime epoch (upper box). GPS and GPS/Galileo vertical positionerror as a function of the time epoch (middle box). Number of visibleGPS/Galileo satellites (lower box). . . . . . . . . . . . . . . . . . . . 91
3.21 GPS and GPS/Galileo horizontal velocity error as a function of thetime epoch (upper box). GPS and GPS/Galileo vertical velocity erroras a function of the time epoch (lower box) . . . . . . . . . . . . . . . 92
3.22 GPS/GLONASS multi-constellation PVT algorithm flaw chart . . . . 94
3.23 Reference trajectory followed by the user during the urban test. Atopographical approach is used for generating a reference solution,the trajectory considered has a polygonal shape, whose vertexes aresurveyed by a total station. . . . . . . . . . . . . . . . . . . . . . . . 95
3.24 Reference Solution obtained trrough a topographic survey. . . . . . . 96
3.25 Equipment: NovAtel FlexPak-G2 single frequency receiver and AntcomActive L1/L2 antenna. . . . . . . . . . . . . . . . . . . . . . . . . . . 97
3.26 Pedestrian test carried out in Centro Direzionale of Naples typicalexample of urban canyon. The total duration of the test is about 30minutes the total distance travelled is about 2.5 km. . . . . . . . . . . 98
3.27 Solution availability as a function of time for GPS only and GPS/GLONASSmulti-constellation solutions. . . . . . . . . . . . . . . . . . . . . . . . 99
3.28 GPS and GPS/GLONASS multi-constellation horizontal position er-rors as function of time (upper box). GPS and GPS/GLONASSmulti-constellation vertical position errors as function of time (lowerbox). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
vi

3.29 Horizontal (upper box) and vertical (lower box) errors as a functiontime. Comparison between configurations adopting altitude aidingand base-line configurations. The vertical component of the solu-tion mainly takes advantage of aiding, because the equation adoptedproperly represents the slow altitude variations. . . . . . . . . . . . . 101
3.30 Horizontal (upper box) and vertical (lower box) errors as a function oftime. Comparison between GPS/GLONASS base-line configurationand configuration adopting altitude aiding and configuration adoptingboth aiding. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
4.1 Schematic representation of the architecture of the pseudolite system. 104
4.2 View of the rover Fasttrax receiver which is able to jointly processGPS and pseudolite signals. . . . . . . . . . . . . . . . . . . . . . . . 106
4.3 Experiment conducted in a large (7 m × 10 m) meeting room. Fourpseudolites were placed at the corners while the antenna of the refer-ence receiver was installed approximately in the centre of the room. . 107
4.4 Local reference frame established for the tests conducted in the largemeeting room. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
4.5 Simulation scenario adopted to investigate the properties of the PRdouble differences. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
4.6 Simulated PR double differences when considering the simulation sce-nario in Figure 4.5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
4.7 Double differences of the PR collected from the four pseudolites usingtwo u-blox receivers. Meeting room, first data collection campaign,repeatability test. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
4.8 Double differences of the PR collected from four pseudolites using twou-blox receivers. Meeting room, second data collection campaign,repeatability test. During the first 60 seconds, reference and roverreceivers were kept in a zero-base line configuration. . . . . . . . . . . 114
4.9 Position solution obtained using corrected PR measurements whereinitial synchronization biases were removed exploiting the zero-baseline configuration adopted during the first 60 seconds of the test.When the user start moving, synchronization corrections were nolonger valid and the position solution diverged. . . . . . . . . . . . . . 115
5.1 Antenna placed on the roof of the PANG (PArthenope NavigationGroup) laboratory building, at Centro Direzionale of Naples (Italy) . 121
5.2 Horizontal scatter of the base-line configuration compared with thatof the Danish method. . . . . . . . . . . . . . . . . . . . . . . . . . . 124
5.3 Horizontal scatter of the base-line configuration compared with thatof the Subset test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
vii

5.4 Horizontal scatter of the base-line configuration compared with thatof the Forward-Backward scheme. . . . . . . . . . . . . . . . . . . . . 125
5.5 Horizontal solutions provided by the configuration using the differentReceiver Autonomous Integrity Monitoring (RAIM) schemes. . . . . . 126
5.6 Detailed view of the horizontal error pertaining to the three bestconfigurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
5.7 Danish and base-line vertical errors as a function of the local time. . . 1285.8 Subset and base-line vertical errors as a function of the local time. . . 1285.9 Forward-Backward and base-line vertical errors as a function of the
local time. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1295.10 Vertical error pertaining to the six configurations using the three dif-
ferent RAIM schemes . . . . . . . . . . . . . . . . . . . . . . . . . . . 1305.11 Danish method horizontal and vertical velocity error as a function of
local time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1315.12 Subset test horizontal and vertical velocity error as a function of local
time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1325.13 Forward-Backward horizontal and vertical velocity error as a function
of local time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1335.14 Horizontal and vertical velocity errors for the trhee RAIM schemes . . 1335.15 Number of the PRs excluded by the three RAIM algorithms plotted
as a function time. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1345.16 Number of the PR rate measurements excluded by the three RAIM
algorithms considered. . . . . . . . . . . . . . . . . . . . . . . . . . . 1345.17 Pedestrian test carried out on 21st June 2012 around 10:00 am in
Centro Direzionale of Naples (Italy), a typical example of urban canyon.1355.18 Sky plot pertaining an epoch where only three GPS satellites were
available and the solution was obtained exploiting aiding informa-tion. Geometrically, the pseudo-measurement can be interpreted asa satellite at the zenith. . . . . . . . . . . . . . . . . . . . . . . . . . 138
5.19 Horizontal and vertical positition error of the configurations consid-ered without RAIM application. . . . . . . . . . . . . . . . . . . . . . 139
5.20 Horizontal and vertical errors for base-line configurations with andwithout RAIM, considering only reliable epochs and using the NovA-tel OEM615 receiver . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
5.21 Horizontal and vertical errors for the configurations with RAIM eachconfiguration is analyzed in the relative reliable epochs and usingNovatel OEM615 receiver. . . . . . . . . . . . . . . . . . . . . . . . . 141
5.22 Horizontal (upper box) and vertical (lower box) errors as a functin oftime using u-blox receiver without RAIM application. . . . . . . . . . 143
5.23 Horizontal (upper box) and vertical (lower box) errors as a functionof time using the u-blox receiver with RAIM application. . . . . . . . 144
viii

5.24 Horizontal (upper box) and vertical (lower box) errors as a functionof time using the u-blox receiver. Performance conparison betweenconfiguration with and without RAIM shows the advantages of theuse of the quality checks and of aiding. . . . . . . . . . . . . . . . . . 145
5.25 Equipment used for indoor positioning: a u-blox LEA-6T single fre-quency High-Sensitivity (HS) Global Positioning System (GPS) re-ceiver and a GPS antenna. The test was carried out in the corridorof the first floor of a large office building in the JRC premises (Ispra,Italy) on July 2013. Several control points were placed in the corridorfor performance evaluation. . . . . . . . . . . . . . . . . . . . . . . . 147
5.26 Indoor GNSS navigation solution. Position fixes obtained using themeasurements from a HS Global Navigation Satellite System (GNSS)receiver. Although the measurements were taken indoors, positionfixes are only occasionally inside the building seleceted. . . . . . . . . 148
5.27 Universal Software Radio Platform (USRP) pseudolites. Two config-urations used for signal transmission. A passive GNSS antenna wasinitially used for signal transmission as indicated in a). To limit thetransmit power, a second configuration, with the transmit antennaremoved was adopted b) . . . . . . . . . . . . . . . . . . . . . . . . . 150
5.28 Location of the control points and of the three USRP pseudolites . . . 151
5.29 Control point distances from the different pseudolites . . . . . . . . . 152
5.30 Estimated C/N0 values as a function of the control point location. . . 153
5.31 Calibration results interpolating C/N0 values as a function of distance.153
5.32 Estimated C/N0 values as a function of time. The measurementspresented were used for demonstrating Received Signal Strength In-dicator (RSSI) positioning. . . . . . . . . . . . . . . . . . . . . . . . . 155
5.33 Horizontal position estimates obtained using an RSSI based algorithm.156
5.34 North coordinate evolution as a function of time. The red dotted lineindicates the position of the control points. . . . . . . . . . . . . . . . 157
5.35 Calibration results interpolating C/N0 values as a function of distanceconsidering different power parameters, Ki. Meeting room tests. . . . 159
5.36 Calibration results interpolating C/N0 values as a function of distanceconsidering a single power parameter, K. Meeting room tests. . . . . 160
5.37 Estimated C/N0 values as a function of time. The measurementswere used for Received Signal Strength (RSS) positioning. . . . . . . 161
5.38 Position estimates obtained using the RSS algorithm and processingraw C/N0 measurements. . . . . . . . . . . . . . . . . . . . . . . . . . 162
5.39 Estimated C/N0 values as a function of time. Filtered C/N0 mea-surements using a Butterworth filter of order 13. . . . . . . . . . . . . 163
ix

5.40 Power Spectral Densitys (PSDs) of the C/N0 measurements and trans-fer function of the Butterworth filter used to pre-process raw obser-vations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
5.41 Position estimates obtained using filtered C/N0 measurements. . . . . 1645.42 Position estimates obtained using filtered C/N0 measurements, each
lap is analyzed separately. Lap 3 is considered separately in Figure5.43 in order to better investigate the impact of loss of lock. . . . . . 165
5.43 Effect of the loss of lock of one pseudolite signal in the position esti-mates obtained using filtered C/N0 measurements. Third lap. . . . . 166
5.44 Position solution in the WGS84 absolute coordinate system. Meetingroom, repeatability test. . . . . . . . . . . . . . . . . . . . . . . . . . 167
x

List of Tables
1.1 Average signal attenuation for different material. . . . . . . . . . . . . 8
2.1 Four outcomes for making a decision. The decision can be eithercorrect (correctly reject or retain null) or wrong (incorrectly reject orretain null). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.2 GPS Galileo and GLONASS Differences . . . . . . . . . . . . . . . . 61
3.1 Coordinates of the antenna placed on the rooftop of the EMSL in theJRC premises in Ispra . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.2 IOV E1BC PR error parameters . . . . . . . . . . . . . . . . . . . . . 743.3 GPS (L1) and Galileo (E1BC) PR errors statistics . . . . . . . . . . . 753.4 IOV E1BC PR-rate error parameters . . . . . . . . . . . . . . . . . . 763.5 GPS (L1) and Galileo (E1BC) PR-rate error statistics . . . . . . . . . 783.6 E1bc and E5a PR error statistics . . . . . . . . . . . . . . . . . . . . 793.7 E1BC and E5A PR Rate error statistics . . . . . . . . . . . . . . . . 793.8 E1BC and E5a Galileo Only position error statistics . . . . . . . . . . 823.9 GPS Limited DOP and Galileo horizontal position error parameters. . 833.10 Galileo Iono-free position error statistics . . . . . . . . . . . . . . . . 843.11 Horizontal velocity error statistics for GPS Limited DOP, Galileo
E1bc and Galileo E5a configurations. . . . . . . . . . . . . . . . . . . 843.12 Vertical velocity error statistics for GPS, Galileo E1BC and Galileo
E5a configurations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 853.13 Horizontal and vertical position error statistics for GPS and GPS/GALILEO
multi-constellation positioning. . . . . . . . . . . . . . . . . . . . . . 913.14 Horizontal and vertical velocity error statistics for GPS and GPS/Galileo
multi-constellation velocity solution. . . . . . . . . . . . . . . . . . . . 923.15 Solution availability values of the configurations considered. . . . . . 983.16 Horizontal and vertical error statistics for GPS and GPS/GLONASS
multi-constellation solutions. . . . . . . . . . . . . . . . . . . . . . . . 99
4.1 Location of the four pseudolites and Master Control Statio (MCS)used for the meeting room tests. . . . . . . . . . . . . . . . . . . . . . 107
xi

4.2 Location of the control points placed in the meeting room. . . . . . . 1094.3 Location of the Master Pseudolite (MPL) for the second data collec-
tion campaign performed in the meeting room. . . . . . . . . . . . . . 113
5.1 Coordinates of the antenna placed on the roof of the PANG laboratory1205.2 Solution Availability and Reliable Availability of the position. . . . . 1225.3 Solution Availability and Reliable Avaliability of the velocity solution. 1235.4 Statistical position error parameters: Root Mean Square (RMS) and
maximum errors for both horizontal and vertical components. . . . . 1265.5 Statistical position error parameters: RMS and maximum errors for
both horizontal and vertical components. . . . . . . . . . . . . . . . . 1315.6 Solution Availability and Reliable Availability of the position using
Novatel OEM625 receiver . . . . . . . . . . . . . . . . . . . . . . . . . 1365.7 Statistic parameters of the errors for the base-line configurations with-
out RAIM application. . . . . . . . . . . . . . . . . . . . . . . . . . . 1385.8 GNSS performance in the kinematic test with RAIM, using Novatel
OEM615 receiver and considering only reliable epochs . . . . . . . . . 1405.9 Statistical parameters of horizontal and vertical errors for the config-
urations with RAIM using NovAtel OEM615 receiver and consideringonly reliable epochs. . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
5.10 Solution Availability and Reliable Availability of the position usingthe u-blox receiver . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
5.11 Statistical parameters of the horizontal and vertical errors for theconfigurations without RAIM using the u-blox receiver. . . . . . . . . 143
5.12 Statistical parameters of horizontal and vertical errors for the config-urations with RAIM using u-blox receiver, considering only reliablesolutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
5.13 Statistical parameters of horizontal and vertical errors for the aidedconfigurations using u-blox receiver, considering only reliable solutions 145
5.14 Coordinates of control points placed on the corridor of the first floorof the building selected for the data collection. . . . . . . . . . . . . . 148
5.15 Pseudolite coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . 1495.16 Parameters for RSSI positioning obtained through calibration. . . . . 1545.17 Power parameters and path loss exponent for the meeting room ex-
periments considering different received power levels. . . . . . . . . . 1585.18 Power parameter and path loss exponent for the meeting room ex-
periments considering a single, K. . . . . . . . . . . . . . . . . . . . . 159
xii

List of Acronyms
AAIM Aircraft Autonomous Integrity Monitoring
AGC Automatic Gain Control
ARP Approximate Radial-error Protected
BOC Binary Offset Carrier
BPSK-R Binary Phase Shift Keying with Rectangular spreading symbols
bps bits per second
C/A Coarse/Acquisition
CDMA Code Division Multiple Access
C/N0 Carrier-to-Noise power spectral density ratio
COTS Commercial Off-the-Shelf
DGPS Differential GPS
DIA Detection Identification and model Adaptation
DVB-T Digital Video Broadcasting - Terrestrial
DNS Decca Navigation System
DoD Department of Defense
DOP Dilution Of Precision
DSSS Direct Sequence Spread Spectrum
ECEF Earth Centered Earth Fixed
EDOP East DOP
EGNOS European Geostationary Navigation Overlay Service
EMSL European Microwave Signature Laboratory
ENU East North Up
ESA European Space Agency
xiii

FD Fault Detection
FDE Fault Detection and Exclusion
FDI Fault Detection and Identification
GAGAN GPS Aided Geo Augmented Navigation
GBAS Ground Based Augmentation System
GCS Ground Control Segment
GGSP Galileo Geodetic Service Provider
GGTO Galileo to GPS Time offset
GIM Global Ionosferic Map
GIOVE Galileo In-Orbit Validation Element
GLONASS GLObal NAvigation Satellite System
GMS Galileo Mission System
GNSS Global Navigation Satellite System
GPS Global Positioning System
GST Galileo System Time
GT Global Test
GTRF Galileo Terrestrial Reference Frame
HDOP Horizontal DOP
HIL Horizontal Integrity Limit
HPL Horizontal Protection Limit
HPS High Precision navigation Signals
HS High-Sensitivity
ICAO International Civil Aviation Organization
IMES Indoor MEssaging System
IOV In Orbit Validation
xiv

JAXA Japan Aerospace Exploration Agency
JRC Joint Research Centre
LBS Location Based Service
LORAN LOng RAnge Navigation
LOS Line Of Sight
LS Least Squares
LT Local Test
MCS Master Control Statio
MDB Minimum Detectable Blunder
MEO Medium Earth Orbit
MPL Master Pseudolite
MSAS Multi-functional Satellite Augmentation System
MSE Mean Squared Error
NNSS Navy Navigation Satellite System
NDOP North DOP
P Precision
PDOP Position DOP
PPL Position Protection Level
PPP Precise Point Positioning
PPS Precise Positioning Service
PRN Pseudo Random Noise
PSD Power Spectral Density
PVT Position Velocity Time
PZ90.02 Parametrop Zemp 1990 version 2
QZSS Quasi-Zenith Satellite System
xv

RAIM Receiver Autonomous Integrity Monitoring
RF Radio-Frequency
RMS Root Mean Square
RSS Received Signal Strength
RSSI Received Signal Strength Indicator
SA Selective Availability
SBAS Satellite-based Augmentation System
SD Single Difference
SDCM System of Differential Correction and Monitoring
SIS Signal in Space
SNAS Satellite Navigation Augmentation System
SNR Signal-to-Noise Ratio
SoL Safety of Life
SPS Standard Positioning Service
SS Space Segment
SSF Space System Finland
STD STandard Deviation
TAI Temps Atomique International
TGD Time Group Delay
TTA Time To Alarm
URA User Range Accuracy
US User Segment
USRP Universal Software Radio Platform
UTC Universal Coordinate Time
VDOP Vertical DOP
xvi

VPL Vertical Protection Level
VHF Very High Frequency
WAAS Wide Area Augmentation System
WARP Weighted ARP
WGS84 World Geodetic System 1984
WLS Weighted LS
WMSE Weighted MSE
WRAIM Weighted RAIM
xvii

Acknowledgements
The author would like to thank the STA Unit (Security and Technology Assessment)of the JRC (Joint Research Centre) for the valuable support and for providing thetest equipment.

2

Chapter 1
Introduction
In this chapter a summary of the background material used in this thesis is provided:the importance and the limitations of satellite navigation are analyzed, highlightingthe difficulties of navigation in degraded scenarios such as urban canyons, densevegetation or indoor environments.Then an overview of previous work and its limitations are introduced; the mainobjective of this research, i.e. the investigation of the performance of ReceiverAutonomous Integrity Monitoring (RAIM) algorithms in different scenarios, is dis-cussed. Their performance is evaluated in urban scenarios using Global NavigationSatellite System (GNSS) alone and in indoor environments using a hybrid systemcomposed by GNSS and pseudolites .
1.1 Background
Navigation is the answer to the human needs of exploring, traveling and finding theway home. Navigation is defined as the science of determining position and directionon and near the Earth surface. The bases of such discipline are rooted on differentsciences such as astronomy and mathematics and it was initially developed by sailorsas a primary way to guide themselves safely to their final destinations. The devicesmainly used were based on the observation of the stars such as the sextant. Thedevelopment of new technologies introduced the use of different methods and sourceof measurements. In the first middle of XIX century Radio-Frequency (RF) signalswere used to determine position and a new branch of navigation, denoted as radio-navigation, was introduced.The first idea of using radio beams for navigation goes back as far as at the beginningof 1900, when Scheller proposed:
“marking of ship lanes with the use of two beams, one from each of two
3

1 – Introduction
radio transmitter, which crossed each other”.
The first application of this concept was in the 1925 with the “four-course-navigation-system” used until 1978.After this milestone, several radio-navigation systems were developed such as:
� Decca Navigation System (DNS), able to provide radio positioning for marinersand aviators. Users were able to estimate their positions measuring time dif-ferences between the received and transmitted signals. DNS system was shutdown in the spring 2000;
� The LOng RAnge Navigation (LORAN) system the user was able to computeits position measuring the time difference between the receipt of signals froma pair of radio transmitters. This time difference can be represented by ahyperbolic line of position, which can be plotted on LORAN time delay chart.The intersection between hyperbolic lines relative to a two piars of stationsprovide the user position;
� TRANSIT system, formally known as Navy Navigation Satellite System (NNSS),was based on the use of the Doppler frequency shift to determine the user po-sition. TRANSIT was the first satellite navigation system and it was able toprovide continuous navigation satellite service from 1964 to 1996.
With the TRANSIT development started the satellite navigation era. Since then anuser equipped with a receiver has been able to determine his position using signalstransmitted by a constellation of satellites.Satellite navigation has been traditionally carried out in “open sky” environments(without obstructions); these scenarios are characterized by relatively good line-of-sight signal reception conditions and a high number of visible satellites. Thereis however a growing need to use GNSS for a large number of problems arising insignal degraded environments such as urban canyons and indoors. The use of satellitenavigation in ‘hostile’ environments promotes the development of suitable navigationtechniques in order to provide seamless outdoor and indoor availability which couldenable a large number of applications such as personal digital assistant location,vehicular navigation and emergency services. Navigation system performance canbe analyzed in terms of:
� Availability defined as the percentage of time that the services of the systemis usable [5];
� Accuracy defined as the degree of conformance1 of an estimated or measuredposition with respect to the true position [5];
1Conformance is how well something is compliant with certain accepted standards or norms
4

1.1 – Background
� Coverage defined as the surface area or space volume in which the signals areadequate to determine position within a specified level of accuracy [5];
� Integrity defined as the measure of trust that can be placed in the correctnessof the information supplied by a system [5].
A single GNSS operating in a degraded scenario may not satisfy one or more re-quirements on the aforesaid parameters; a possible approach to enhance GNSS per-formance in these environments is the use of a multi-constellation system, i.e. usingtogether measurements provided by different GNSS, such as Global Positioning Sys-tem (GPS), GLObal NAvigation Satellite System (GLONASS) and Galileo.GPS and GLONASS are the only two systems fully operational while Galileo is in itsdevelopment phase. The algorithms and the advantages of the multi-constellationapproach are detailed in the Section 2.5. Multi-constellation system provides im-provements with respect to a single GNSS in signal degraded scenarios [6], so itsuse brings a key added value to the solution availability, especially in urban envi-ronments. Despite this advantages, it is usually not sufficient for indoor scenarioswhere a different approach is required.Applications performed in difficult signal conditions, where the signals are blocked orstrongly attenuated, push the use of special High-Sensitivity (HS) GNSS receivers,able to track weak GNSS signals that a traditional receiver would otherwise be un-able to process. HS receivers are characterized by massive parallel correlation, inthis case the processing gain can be as much as 30 dB (1000 times) higher than in astandard GNSS receiver [7]. This allows the HS receiver to acquire signals and workin many places where GNSS positioning was not previously possible, even indoorsand where the line-of-sight between the receiver and the satellites is obstructed [8].HS GNSS receivers usually maintain track of weak GNSS signals extending the in-tegration time; this technique is the key to increase sensitivity, but even if signalsare weak, the receiver still needs to get a fix in a reasonable amount of time (a fewseconds), so the code/frequency search space has to be reduced. This reductioncould be achieved using different techniques, i.e. coarse-time assistance and fine-time assistance [7].HS receivers guarantee a more continuous solution with respect to traditional devicesimproving the availability of the solution. However they do not necessarily guar-antee an improvement in terms of position accuracy. Due to low Signal-to-NoiseRatio (SNR) values and multipath effects, the navigation accuracy is degraded andincreased measurement noise prevents high-sensitivity receivers from achieving thelevel of accuracy performance typical for example of high accuracy, geodetic GNSSdevices [9].As above mentioned, one of the critical parameters for navigation systems is in-tegrity which refers to the ability of the system to provide timely warnings to users
5

1 – Introduction
when the system should not be used. In several applications, information about thereliability of the GNSS solution has great importance. For example, in integratednavigation when inertial sensors are used along with GNSS measurements, the bi-ases of the low cost inertial sensors have to be estimated using information providedby GNSS. If the navigation solution obtained using GNSS is unreliable an erroneouscalibration of the inertial sensors is performed degrading the final performance ofthe whole system.GNSS provide integrity information to the user via the navigation message, butthis may not be timely enough for some applications. The most common anomalysources reported during GNSS operations are related to satellite clocks Since theground control segments of legacy GNSS do not have full time satellite visibility, ananomaly in one of the satellites could take up to a few hours to be identified anddisseminated. Therefore, additional means of providing integrity are necessary.Different techniques are available to provide integrity information:
� Aircraft Autonomous Integrity Monitoring (AAIM) integrates the measure-ments obtained from GNSS receivers with information from independent onboard sensors to improve integrity and availability;
� Ground Based Augmentation System (GBAS) is designed to improve accu-racy and integrity and, hence, availability for precision approach operationsaccording to International Civil Aviation Organization (ICAO) requirements.This technique uses local-area ground stations to monitor the satellite systemstatus and calculate correction terms which are broadcast to the users througha Very High Frequency (VHF) communication channel;
� Satellite-based Augmentation System (SBAS) is a wide-area differential aug-mentation system, composed by a network of ground stations at known posi-tions to monitor the ranging signals of the satellite constellation. The SBAScollects and process all the input data provided by the station network inorder to compute and provide corrections with respect to the original navi-gation information determined using the primary constellation. In additionto this, it provides integrity bounds over a certain region. These pieces ofinformation are broadcast to the users using geostationary satellites. Cur-rently, three SBAS systems are fully operational, Wide Area AugmentationSystem (WAAS) in the U.S., European Geostationary Navigation OverlayService (EGNOS) in Europe, and Multi-functional Satellite AugmentationSystem (MSAS) in Japan. Other systems such as System of DifferentialCorrection and Monitoring (SDCM) in Russia, GPS Aided Geo AugmentedNavigation (GAGAN) in India and Satellite Navigation Augmentation Sys-tem (SNAS) in China are under development. Their role is to augment theperformance of GNSS improving their service integrity and accuracy;
6

1.1 – Background
� RAIM uses the redundancy of simultaneous measurements to check whetherthey are consistent or if there are erroneous observations; in the case of fivereceived satellite signals, simple redundancy allows the receiver to detect if asatellite is transmitting inaccurate information. A minimum of six satellites isrequired to identify which satellite is faulty.
The first technique involves the use of additional sensors to obtain the integrityinformation and is usually adopted in the avionic application, GBAS and SBASinvolve the use of a network of ground stations, so additional infrastructures arerequired. These techniques are however not able to detect local errors. For theaforesaid reasons, in this thesis the RAIM technique is adopted. It is a user leveltechnique and is able to detect user level errors such as multipath or local interfer-ence sources. Several schemes have been proposed in order to perform a reliabilityanalysis and quality monitoring to identify, and eventually reject, the erroneousmeasurements.Traditionally, interest in the position solution integrity and reliability has focused onsafety-critical navigation applications such as in aviation. So, initially, RAIM wasconsidered as a part of air navigation; hence the algorithms developed assume thatnavigation is performed in an open sky and only one satellite at a time transmitsan erroneous signal.Most RAIM algorithms, that are currently used, were developed when only GPS wasfully operating and the main application was the use of GPS as a supplementary nav-igation system for the en-route phase of the flight. Some important characteristicsof the initial operation environment for RAIM are:
� only GPS was involved and no system interoperability issues were considered;
� the accuracy of GPS was at least an order of magnitude better than wasrequired for the application, despite the presence of Selective Availability (SA);
� under nominal conditions SA was the dominant error source, which allowed aneasy and simple (same for all satellites) characterization of the ranging errorsand their time-correlation properties;
� the ranging errors from different satellites could be considered to be essentiallyuncorrelated.
In signal degraded environments, the hypothesis of one blunder is not sufficient;often two or more measurements are affected by gross errors. Hence the classicalRAIM algorithms need to be modified to take in to account the presence of mul-tiple blunders. However in personal applications, typically carried out in hostileenvironments, the usage of RAIM could be limited due to the absence of sufficientredundancy to perform statistical testing required by RAIM. Pseudo measures and
7

1 – Introduction
additional measurement sources, could be used to increase the availability of a nav-igation solution as well as the reliability assessment: these approaches are detailedrespectively in Section 3.2 and in Section 5.1.2.In order to overcome GNSS limitations in indoor navigation, additional ranging sig-nals transmitted from ground-based pseudolite are considered. In these scenarios,satellite signals are severely attenuated depending on the type of building materialsas shown in Table 1.1 [10].The concepts of pseudolites was proposed even before the launch of the first GPS
satellites: pseudolites broadcasting GPS like signals were originally developed totest GPS receivers. Since them, several pseudolite solutions have been developed fora variety of positioning and navigation applications. Currently, a pseudolite systemcan be used as a local augmentation tool for GNSS positioning systems.Pseudolite systems can be divided in two main categories depending on the prin-ciple adopted for positioning. Positioning can be performed using a trilaterationtechnique if pseudolites are synchronized and able to provide range measurements,or using the proximity principle or other techniques if asynchronous pseudolites areadopted. When the proximity principle is adopted, the user position is determinedas that of transmitter associated to the strongest received pseudolite signal. Pseudo-lites can be considered as a technology complementary to GNSS with the potentialof bringing Location Based Service (LBS) indoors. In some cases, their developmentis encouraged by government organizations as part of their GNSS. For example, inthe latest version of the Quasi-Zenith Satellite System (QZSS) Interface ControlDocument the signal structure for a ground based pseudolite system called IndoorMEssaging System (IMES) is detailed. Although IMES is not a ranging systems, itis based on the proximity principle and it could be considered as a component of ahybrid system together with GNSS. Such hybrid system improves the performance
Table 1.1. Average signal attenuation for different material.
Building Material Attenuation [dB]
Wood 2.4Brick 5.19
Double Brick 10.38Concrete 9.57
Reinforced Concrete 16.70Glass 2.43
Tinted Glass 24.44Double Brick Around Concrete 19.95
Sand 2Tiles 5.19
8

1.2 – Previous Work and Limitations
with respect to GNSS in terms of:
� Solution availability directly related to measurements availability;
� Accuracy because of positioning solutions geometry is significantly strength-ened;
� Integrity, the increased measurements availability and so the enhanced redun-dancy of the system improves the detection of gross errors.
1.2 Previous Work and Limitations
Most of the RAIM research has been targeted at avionic applications requiring highlevels of integrity. This topic is properly investigated in [11], where the availability ofthe RAIM-Fault Detection and Exclusion (FDE) function based on [12] are analyzed.In addition RAIM is evaluated and compared with conventional snapshot based tech-niques using measurements from a single epoch. In the literature this approach isopposed to sequential algorithms that process not only the present measurementsbut also the past ones. Details on how to implement Weighted RAIM (WRAIM)and how to use geometry selection to guarantee a certain level of protection areprovided in [13] and the introduction of different weights for the measurements ispresented. Different approaches could be adopted for quality monitoring, i.e. ana-lyzing least squares residuals or parity vectors. In [14] a review of range-comparison,least squares residuals and parity RAIM methods is performed in order to demon-strate the equivalence of the three techniques. One of the main goals of RAIMtechniques is the computation of Horizontal Integrity Limit (HIL) or HorizontalProtection Limit (HPL), which is a metric representing the radius of a circle cen-tered on the GNSS position solution and is guaranteed to contain the user positionwithin the specifications of the RAIM scheme considered. The HPL is calculatedas a function of the RAIM threshold and the satellite geometry at the time of themeasurements.Although RAIM researches mainly focused on the horizontal component, severalwork has been targeted at the development of algorithms for vertical guidance as in[15] and in [16]. The focus of [15] was the use of modernized GPS and new satellitenavigation systems to aid air navigation in approach and landing phases. In [16],the concept of Vertical Protection Level (VPL) was investigated with specific em-phasis on which VPL could be achieved with RAIM using GPS and Galileo. Allthe above mentioned researches were developed for open sky applications, consider-ing only one fault on a single satellite; these approaches can not be used in signaldegraded environments where the hypothesis of one blunder is not realistic: oftentwo or more measurements are affected by gross errors and hence the approaches
9

1 – Introduction
presented in [15, 16] need to be modified. One of the most common approach to en-hance RAIM performance is the introduction of additional measurements providedby other GNSS; hence the development of new GNSS, such as the European sys-tem Galileo and the Chinese Beidou and modernization of the Russian GLONASSpromote the development of suitable RAIM algorithms for multi-constellation con-figurations as proposed in [17]. Although a solution for integrated GPS/GLONASSwas proposed by [17], the analysis was carried out only simulating the performanceof the two considered constellations. The multi-constellation approach promotesthe investigation of different measurement weighting for RAIM purposes. In [18]the need to adapt Fault Detection (FD) and FDE algorithms are considered totake into account the characteristics of the post SA range errors and the presenceof different types of satellites with different failure characteristics. The benefits ofGLONASS measurements are evaluated in [19] where the main target was to testRAIM algorithms in GPS/GLONASS configurations and verify the advantages ofthe GLONASS inclusion with respect to the GPS only case. The performance ofRAIM algorithms has been investigated also for high-precision applications with agood line of sight condition and the adoption of RAIM algorithms using carrier phasemeasurements has been analyzed. In [20], a new RAIM algorithm for outlier identi-fication and rejection has been developed for aircraft precision approach and landingusing carrier phase measurements. In [21] a simple but effective RAIM and faultisolation technique is presented using carrier-phase measurements with an effectivefloating ambiguity technique along with real-time orbit and clock corrections gener-ated at ground network processing hubs. As mentioned before, the RAIM researchhas mainly focused on aircraft applications but some research activities are carriedout also for marine navigation. For instance in [22] a combination of RAIM and amarine Differential GPS (DGPS) systems has been presented whereas in [23] RAIMalgorithm performance is investigated using a selection of typical marine-grade GPSreceivers. There is a growing need to use satellite navigation for an array of naviga-tion problems in degraded signal environments, such as urban canyons and indoors,hence RAIM techniques have to be enhanced and, in some cases, redesigned in orderto be adopted in these scenarios. Several approaches are proposed in [7], where theauthor assessed reliability testing and quality control procedures at the user levelin poor signal conditions using HS GPS receivers. In [24] classical reliability testingwas also extended by including an assessment of the redundancy and the geometryof the obtained user position solution. In [25] performance evaluation of RAIM algo-rithm has been carried out and the benefit of the inclusion of pseudo-measurementshas been assessed.
10

1.3 – Objectives
1.3 Objectives
Erroneous measurements, that frequently occurs encountered in degraded signalenvironments, need to be identified and eventually rejected with appropriate relia-bility monitoring techniques such as RAIM. Although RAIM adds complexity to thenavigation process, reliability and quality monitoring improve the accuracy of thenavigation solution identifying outliers or at least providing an alarm if the solutionis not reliable. So the use of a suitable technique for checking the quality of themeasurements is essential. The design of a reliability test scheme is a challengingtask in “hostile” environments due to:
� lack of measurements;
� presence of a multiple blunders and their large magnitudes.
RAIM techniques are essentially based on statistical tests which could be properlyperformed only if the assumptions about the error distributions are sufficiently valid;so the following parameters have to be carefully selected:
� appropriate variance model for the observables to enhance the solution esti-mation and reliability assessment;
� value of probability of false alarm used to compute the statistical test thresholdin order to avoid erroneous warning;
� proper satellite geometry quality value involved in the detection phase.
The detection capability of RAIM algorithms has to be validated at first in thecase of a single blunder and then the identification and rejection of the erroneousmeasurements have to be performed subsequently. Sometimes, reliability monitoringis unavailable due to insufficient redundancy. In order to increase the number ofmeasurements different approaches are introduced in this thesis:
� multi-constellation system combining different GNSS as detailed in Section2.5;
� pseudo-measurements introduction considering the system state dynamics asdescribed in Section 2.5.2;
� use of pseudolite technologies for indoor navigation as presented in Section5.2.
The first approach involves the use of GLONASS and Galileo along with GPS:multi-constellation improves the geometry of the system [6]. The combined use ofGPS, GLONASS and Galileo provides a near two-thirds increase in the number of
11

1 – Introduction
available measurements. In hostile environments, improvements in accuracy andavailability becomes more evident [25] with respect to the open sky conditions, somulti-constellation could be a suitable approach to enhance navigation performancein signal degraded environments [6]. GLONASS and Galileo are therefore used inthis research as an augmentation to GPS.
In the second approach, information related to the dynamics of the systemare used as additional equations in the measurement model enhancing the redun-dancy of the system. For example in multi-constellation configurations, an equationrepresenting the behavior of the inter-system bias could be used; i.e. in a multi-constellation approach a further unknown, representing the offset between the sys-tems time scales, has to be included in the navigation solution. This offset couldbe considered constant during a brief period of time [26], so this information canbe translated in an equation representing the dynamics of the unknown as detailedin Section 2.5.2. The benefits of the pseudo-measurement introduction has beendemonstrated in [27].With respect to indoor navigation, two different approaches have been considered.In the first approach, an asynchronous system based on the proximity principleand on Received Signal Strength Indicator (RSSI) positioning has been consideredwhereas the second technique considers a synchronized pseudolite system providingrange measurements. The performance of the two configurations has been analyzedand the benefits of the combined use of GNSS and pseudolite has been evaluatedwith specific focus on the performance of RAIM algorithms. Due to the limitationsof the literature mentioned in the previous section, the main goals of this thesis are:
� modify classical navigation RAIM approaches to consider the presence of mul-tiple blunders and discuss position and velocity reliability monitoring underthis condition;
� modification of classical parameters, such as the Approximate Radial-errorProtected (ARP), to p enhance the failure detection process trough satellitegeometry; the modifications suggested should weight differently measurementsof different quality;
� development of a RAIM technique suitable for indoor navigation using highsensitivity receivers;
� evaluation of hybrid systems combining GNSS and pseudolite measurements;
� investigation of the benefit of FDE algorithms for navigation in signal degradedenvironments;
12

1.4 – Thesis Outline
� performance assessment of the FDE algorithms for indoor navigation using acombined system composed by multi-constellation and asynchronous pseudo-lites ;
� evaluation of the enhancement provided by the inclusion of the synchronizedpseudolite system in indoor navigation.
1.4 Thesis Outline
The thesis is organized in six main chapters. The remaining five chapters are brieflydescribed below.
� The principles of satellite navigation are presented in Chapter 2. The mainfeatures in terms of Space, Ground and User Segments of the three GNSSconsidered in this thesis are illustrated along with a description of GNSS ob-servables and their relative errors. Mathematical details of the estimationtechniques used are provided. The concept and interpretation of residuals isintroduced in order to clarify their use in reliability theory. Navigation al-gorithms are presented and a complete description of the reliability theoryis provided. Classical RAIM techniques are analyzed and finally the multi-constellation approach and GNSS augmentation systems are described.
� In Chapter 3, the opportunity provided by the use of the multi-constellation, typically combing GPS and GLONASS or GPS and Galileo, in urban naviga-tion is illustrated. The benefits of combined GPS/GLONASS and GPS/Galileomeasurements in urban environments are discussed. Moreover, a thoroughanalysis of the measurements obtained from the first four Galileo In OrbitValidations (IOVs) satellites is provided. Finally, the potential of combiningGPS and Galileo is discussed.
� In Chapter 4, a complete description of the pseudolite technology adoptedfor this thesis is provided. The principles of asynchronous and synchronoussystems are discussed. In addition, the solution suggested for the hybrid sys-tem combining GNSS and pseudolites is presented. Finally FDE techniquesare modified and applied to the hybrid system.
� The experimental results obtained in different scenarios are described in Chap-ter 5. In particular, the tests conducted can be divided in three main cate-gories. At first, tests have been conducted in good signal conditions consideringboth pedestrian and vehicular dynamics to evaluate the basic performance ofRAIM algorithms. The analysis has been then extended to difficult scenario
13

1 – Introduction
where HS GNSS receivers have been used along with reliability testing. Fi-nally, indoor navigation in heavily degraded signal conditions has been carriedout using pseudolites . The role of RAIM in such conditions has also beeninvestigated. The results are analyzed in terms of accuracy, continuity andintegrity.
� In Chapter 6, several conclusions are provided highlighting the advantagesof quality control and FDE techniques in signal degraded environments. Theimprovements of multi-constellation approach in urban navigation are evalu-ated and finally the benefits of the use of a hybrid system GNSS/pseudoliteare illustrated.
A flow chart highlighting the main topics of the thesis and their connections isprovided in Figure 1.1 along with the relationships among the different chapters.
14

1.4 – Thesis Outline
Figure 1.1. Flow chart of the thesis
15

16

Chapter 2
Principles of Satellite Navigation
In this chapter an overview on Global Navigation Satellite System (GNSS) is pro-vided, highlighting the importance and the principles of the satellite navigation. Thearchitecture of the considered GNSSs is described and the operation principles of thesatellite navigation are introduced. Then navigation solution is described, the esti-mation technique used and the Position Velocity Time (PVT) algorithms developedare analyzed. Then reliability theory is introduced, Receiver Autonomous IntegrityMonitoring (RAIM) and different Fault Detection and Exclusion (FDE) techniquesare discussed. The multi-constellation approach is detailed, analyzing advantagesand limitations of this technique. Finally the pseudolite concept and the relativepositioning methodologies are introduced.
2.1 GNSS Overview
GNSS were conceived as ranging systems from known positions of satellites, in space,to unknown positions on land and sea, as well as in air and space [28]. Hence a GNSSinvolves a constellation of satellites orbiting at about twenty thousand kilometersaltitude over the Earth surface. The satellites continuously transmit signals thatenable users to determine their three-dimensional position velocity and time syn-chronization with respect to Universal Coordinate Time (UTC) [28]. GNSS services,such as positioning and time synchronization, are provided with global coverage andin all weather conditions.Currently, only two systems are fully operational: the system created and realizedby the U.S. Department of Defense (DoD), Global Positioning System (GPS), andsystem developed by the Russian Aerospace Defence Forces, GLObal NAvigationSatellite System (GLONASS). Other systems such as the European Galileo or theChinese Beidou are in the development phase, e.g. Galielo currently (January 2014)
17

2 – Principles of Satellite Navigation
has only 4 satellites. In this research only GPS, GLONASS and Galileo are consid-ered.All GNSS are characterized by a similar structure but with several meaningful dif-ferences. The GNSS structure and the main differences between the consideredsystems are analyzed in Section 2.1.1.
2.1.1 GNSS Structure
A GNSS is usually divided into three major segments: the Ground Control Seg-ment (GCS), the Space Segment (SS) and the User Segment (US).
The GCS is composed by a network of monitoring stations that store and pro-cess the signals received by the satellites. One of the main goals of the GCS is toestimate the orbit parameters, referred to as ephemerides, the satellite clock errorand other parameters such as ionospheric correction. Finally the navigation mes-sages are generated and uploaded to the satellites through ground antennas. TheGCS is responsible for maintaining the satellites and their proper functioning, thisincludes maintaining the satellites in their proper orbital positions (this operationis referred as station-keeping) and monitoring satellite subsystem health and status.Furthermore, the GCS activates spare satellites (if available) to maintain systemavailability. Each system has its own control segment whose stations are strategi-cally placed. Additional details about this topic are available in [28] and [29]. Thedisplacement of the station composing the GPS GCS is shown in Figure 2.1.
The SS consists of a constellation of artificial satellites and its functions are totransmit radio-navigation signals with a specific signal structure, and to store and
Figure 2.1. GPS GCS, available at gps.gov
18

2.1 – GNSS Overview
re-transmit the navigation message sent by the GCS. These transmissions are con-trolled by highly stable atomic clocks on board the satellites. Each GNSS constella-tion is different and a brief description of the three constellations used in this workis provided in the following. A complete description of the SS is available on [28]and [29].
� GPS constellation is defined as an Expandable 24-Slot constellation [30]. Aslot is defined as the location containing at least one operational satellite. 24slots are placed on six orbital planes, with four slots per plane. Three slots areexpandable, i.e. can be occupied by two satellites in backward and forwardpositions with respect to the pre-defined slot location. Satellites without a pre-defined slot are considered surplus [30]. The right ascensions of the adjacentascending nodes are spaced 60 degrees, the orbits are almost circular with aninclination of about 55 degrees and an average altitude of 20200 km. Theorbital period is half a sidereal day1 so that the ground traces repeat eachsidereal day. Currently GPS constellation is composed by 31 Medium EarthOrbit (MEO) satellites (http://www.navcen.uscg.gov).
� GLONASS constellation is nominally composed by 24 artificial satellites placedin three orbital planes whose ascending nodes are 120 degrees apart. Thereare 8 satellites per plane, separated by 45 degrees in argument of latitude.The difference in the argument of latitude of satellites in equivalent slots intwo different orbital planes is 15 degrees. Each satellite is identified by its slotnumber, which defines the orbital plane and its location within the plane. Theorbits are planned to be circular with an inclination of 64.8 degrees and anaverage altitude of 19100 km, corresponding to an orbital period of 11 h 15mthe ground tracks repeating every 17 orbital periods [31]. Currently GLONASSconstellation is composed by 29 satellites as reported on the official web siteof the system http://new.glonass-iac.ru.
� Galileo SS will comprise 27 operational satellites, and 3 active spares, in aWalker constellation 2. The space vehicles are displaced on three orbitalplanes, with a nominal inclination of 56 degrees and an average altitude of23222 km. The satellites will be spread evenly around each plane and will takeabout 14 hours to orbit around the Earth, so the constellation has a repeat
1Sidereal day is defined as the length of time which passes between a given fixed star crossinga given projected meridian. The sidereal day for the Earth is 23 h 56 m 4.1 s
2Walker constellation is characterized by circular inclined orbits of equal altitude and inclina-tion, the orbital planes are equally spaced around the equatorial plane and satellites are equallyspaced within orbital planes
19

2 – Principles of Satellite Navigation
cycle of 10 orbits in 17 days. Currently Galileo constellation is in develop-ment phase and is composed by only 4 In Orbit Validation (IOV) satellites(http://www.satellite-navigation.eu/).
The US consists of all GNSS receivers including space, air, ground and marine.Early receivers were designed for military operations, they were bulky, heavy andlarge compared to recent devices. A typical GNSS user device consists of mainlyfive components: antenna, receiver, processor, input/output, and power supply [32].Receiver’s cost and dimensions change rapidly according to the intended application.For example, a receiver may be embedded in a cell phone like an integrated chip orit can be placed in an aircraft as a big box. The main function of the GNSS receiveris to receive and process GNSS signals, in order to determine GNSS observablesand to solve the navigation equations obtaining the PVT solution. GNSS satellitesbroadcast signals in the L band, the signals are similar but with several meaningfuldifferences and a brief description of the signals used by the three systems consideredis provided in the following. A more extensive treatment could be find in [29] and[32].
� Each GPS satellite transmits data on three frequencies: L1 1575.42 MHz, L21227.60 MHz and L5 1176.45 MHz. Carrier frequencies are generated by multi-plying the fundamental frequency 10.23 MHz by 154, 120 and 115, respectively.All satellites broadcast different spreading sequences on a common carrier fre-quency using Code Division Multiple Access (CDMA) technique [33]. GPSsatellite transmits signals, for civilian users on three frequencies: L1 L2C andL5, but only the L1 frequency contains the civilian Coarse/Acquisition (C/A)code. GPS satellites generate a navigation message based upon data period-ically uploaded from the GCS and adds the message to a 1.023 MHz PseudoRandom Noise (PRN) C/A code, referred to as Standard Positioning Ser-vice (SPS). Each code is unique, and provides the mechanism to identifysatellite in the constellation. GPS satellites broadcast also the Precision (P)code, sometimes called the Precise Positioning Service (PPS).
� GLONASS satellites transmit coded signals in two frequencies located on twofrequency bands, 16021615.5 MHz and 12461256.5 MHz, with a frequencyinterval of 0.5625 MHz and 0.4375 MHz, respectively. Antipodal satellites,which are on the same orbit plane separated by 180 degrees in argument oflatitude, transmit on the same frequency. Each carrier frequency is modulatedby the modulo-2 summation of either a 511 kHz or 5.11 MHz PRN rangingcode sequence and a 50 bits per second (bps) data signal. This 50 bps datasignal contains the navigation message. Each GLONASS satellite is allocated apair of carrier frequencies, referred to as L1 and L2, according to the following
20

2.1 – GNSS Overview
equation [31]:
f =
(178.0 +
K
16
)∗ Z (MHz) (2.1)
where:
– K is an integer value between −7 and +12;
– Z is 9 for L1 and 7 for L2.
GLONASS has two levels of services the SPS and the High Precision navigationSignals (HPS).
� Six independent signals, in the frequency E1 (1.5591.592 MHz), E5 (1.1641.215MHz) and E6 (1.2601.300 MHz), are transmitted by all Galileo satellites. Thesignals transmitted are denoted: L1F, E5a, E5b, E6C, L1P, E6P. The firstfour signals are open-access, while the last two are restricted-access signalencrypted using a governmental encryption algorithm.The signals are modulated using Binary Offset Carrier (BOC) techniques orBinary Phase Shift Keying with Rectangular spreading symbols (BPSK-R) thesame technique used to modulate GPS and GLONASS signals. All satellitesuse the same carrier frequencies with different ranging codes through CDMAtransmission [34].
2.1.2 GNSS Observables
GNSS receivers are able to provide three types of measurements: pseudoranges (PR),Doppler frequencies (PR-rate) and carrier phases (phase). In this research only PRand PR-rate measurements are used, thus they will be described in detail in thissection.A PR represents the apparent distance between the satellite and the receiver an-tenna. These measurements are derived from the PRN codes, by measuring the timeshift required to align the PRN code replica generated by the receiver and the onereceived from the satellite [28]. The aforesaid time shift scaled by the speed of lightprovides the PR measurement, containing the clock receiver bias (GNSS receiversare not synchronized to GNSS time) so the measurement is referred to as PR andnot range. The equation of an ideal PR, ρtrue, i.e. in error-free condition, is:
ρtrue = d+ cdts − cdtr (2.2)
where
� d is the distance between satellite and receiver;
� cdtr is the receiver clock error (m);
21

2 – Principles of Satellite Navigation
� cdts is the satellite clock error (m);
� c is the speed of light3.
The measured PR is affected by various propagation and system specific errors, abrief overview of these error sources is provided in the next section. A completetreatment of each error source can be found in [29, 32, 28].In this research, single point positioning is used and all the error terms are eithermodeled or neglected thus leaving four unknowns which are the three receiver coor-dinates, included in the d term, the clock bias the cdtr . Thus, independent GNSSnavigation requires signals from at least four satellites for computation of a completePVT, solving the system of equations Eq. (2.2). The position accuracy obtainablein single point is about 10 meters [32], if a more accurate position is required adifferent observable has to be used, such as phase whose equation is:
λ · Φ = d+ cdts − cdtr + λ ·N + eorbital − dIono + dTropo + ε (2.3)
where
� λ is the wavelength of the carrier;
� Φ is the phase measurement;
� eorbital are the orbital error;
� dIono is the ionospheric error (m);
� dTropo is the tropospheric error (m);
� ε contains the errors due to multipath, receiver noise and residual errors (m);
� N is the number of cycles in the satellite/receiver distance.
The phase measurement is more precise than PR with more than two orders ofmagnitude less noise [32], but implies the estimation of unknown number of carriercycles between the satellite and the receiver, N . This cannot be determined in singlepoint positioning [29].The Doppler measurement is defined as the derivative of the carrier phase and rep-resents the frequency shift due to the relative receiver-satellite motion [32]. Dopplerobservables scaled by λ, represent the derivative of the satellite-receiver range andcan be used to compute the user velocity (considering known the satellite motion)
3The value for c, 299792.458 m/s, was determined during the World Geodetic System 1984(WGS84) which is the nominal source for all constants used throughout this research.
22

2.1 – GNSS Overview
with a cm/s order accuracy as detailed in Section 2.2.4. The Doppler measurementequation is obtained by taking the derivative of Eq. (2.3) and can be expressed as:
ρ = d+ ˙cdts − ˙cdtr + eorbital + dIono + dTropo + ερ (2.4)
where
� ρ is the measured range derivative, from Doppler measurements (m/s)
� d is the range rate between the satellite and the receiver (m/s),
� eorbital is the satellite orbital error drift(m/s);
� dIono is the ionospheric error drift (m/s);
� dTropo is the tropospheric error drift (m/s);
� ερ contains the errors due to multipath error drift (m/s), receiver noise andresidual errors (m/s).
2.1.3 GNSS Errors
The accuracy with which a user receiver can determine the PVT solution dependson the interaction of various factors. GNSS accuracy performance depends on thequality of the measurements as well as the broadcast navigation data. There is anumber of sources of error that corrupt GNSS measurements as shown in Eq. (2.5);these error sources are briefly discussed in this section. A more comprehensiveoverview is found in [35], [22] and [29].The measured PR is affected by various propagation and system specific errors, andis generally expressed by:
ρ = d+ cdts − cdtr + eorbital + dIono + dTropo + ερ (2.5)
where
� eorbital is the satellite orbital error (m);
� dIono is the ionospheric error (m);
� dTropo is the tropospheric error (m);
� ερ contains the errors due to multipath, receiver noise and residual errors (m),as previously defined.
23

2 – Principles of Satellite Navigation
The role of the receiver and satellite clocks is very important in GNSS positioning;the receiver clock parameters have to be estimated in the navigation solution whilethe satellite clock errors have to be modelled and corrected.
� The satellite clock error is the offset between the time maintained by theatomic clocks on board the satellite and the reference system time. The GCSdetermines and transmits clock correction parameters to the satellites to berebroadcast within the navigation message. These correction parameters areused by the receiver in a second-order polynomial model [33]:
cdts = af0 + af1(t− toc) + af2(t− toc)2 + δtr (2.6)
where:
– af0 is the clock bias (s);
– af1 is the clock drift (s/s);
– af1 is the frequency drift (s/s2);
– toc is the clock data reference time (s);
– t is the current time epoch (s);
– δtr is the correction due to relativistic effects (s).
The user has to apply the relativistic correction δtr in order to account for theeffects that the slight eccentricity of the satellite orbits causes. The satellitetravels through different levels of gravitational potential and a change in itsvelocity occurs thus causing changes in the clock [32].Due to rotation of the Earth during the time of signal transmission, a rel-ativistic error is introduced, known as the Sagnac effect as detailed in [32][29].
� The receiver clock error is a time-varying error that affects all the rangemeasurements in the same amount for a fixed epoch and is included as anunknown in the navigation solution in single point positioning. Its drift affectsall the Doppler measurements in the same way [32] hence it is included as anunknown in velocity estimation.
� GNSS signals are affected by the medium through which they travel from thesatellites to the receiver antenna, the signals travel through Ionosphere andTroposphere.The first one is defined as the layer extending from a height of about 50 km toabout 1000 km and consists of ionized air (free electrons and ions) [28]. Thepresence of free electrons affects the refractive indices of the various layers of
24

2.1 – GNSS Overview
the ionosphere, and thus the GNSS signals do not travel at the speed of lightin the vacuum; the change in velocities ultimately results in phase advanceand code delay [32].The ionosphere effect could be reduced with different techniques, the singlefrequency receivers have to apply an ionospheric correction model, such asKlobuchar Ionospheric Model [36] and NeQuick Ionospheric Model [37], toremove as much as possible this effect. A complete description and comparisonbetween the aforesaid models is provided in [37]. Multi-frequency receivers canremove the ionospheric effect using a Iono-free measurement combination asshown in Section 2.1.2 because the ionosphere is a dispersive4 medium.Using a linear combination of the observables is it possible to remove theionospheric effect. The expression of the new observable is:
PI = c1P1 − c2P2 (2.7)
where P1 and P2 are the PR related to L1 and L2 frequencies, and c1 and c2are determined to eliminate the ionospheric effect. Their expression is [28]:
c1 =f 21
f 21 − f 2
2
c2 =f 22
f 21 − f 2
2
(2.8)
The troposphere is the atmospheric layer placed between Earth’s surface andan altitude of about 60 kilometers. The effect of the troposphere on the GNSSsignals appears as an extra delay in time of flight of the signal. This delaydepends on the temperature, pressure, humidity as well as the transmitter andreceiver antenna locations [29].The tropospheric error is typically divided in two components: a dry com-ponent, including about 90% of the error and highly predictable, and a wetcomponent, including about 10% of the error and more difficult to predict. Insingle point positioning, tropospheric delay is usually computed using modelsuch as the Hopfield [28] or Saastamoinen model [38].In this research the first of the above mentioned models is used, a completedescription of the models could be find in [28].
� The satellite orbital errors are the difference between the true satellitepositions and the computed values. Satellites ephemerides are computed and
4In a dispersive medium the wave propagation speed and the refractive index depends on thefrequency of the transmitted signal
25

2 – Principles of Satellite Navigation
up-linked by the GCS to the satellites which rebroadcast them to the user.As for the satellite clock corrections, ephemeris parameters are predicted usinga curve fit by the control segment.The orbital error has three components expressed in the satellite coordinatesystem5 [39]: along-track, cross-track and radial as shown in Figure 2.1.3.
R
S
W
^
^
^
v
K^
Cross-track
Along-track
RadialJ^
I^
Figure 2.2. Orbital error component
The range error is essentially related to the radial component, the magnitudeof the ephemeris prediction error is, however, realized when the total errorvector is projected onto the user Line Of Sight (LOS) unit vector.
� The multipath error is caused by the arrival at the receiver of the signalvia multiple paths due to reflections during the signal propagation [29]. Mul-tipath errors vary significantly in magnitude depending on the environment,satellite elevation angle, receiver signal processing, antenna gain pattern, andsignal characteristics. Multipath generally causes a systematic error in themeasurements and can cause the measured range to be larger or smaller with
5Satellite Coordinate Systems, RSW moves with the satellite. The R axis points from the Earthcenter along the radius vector toward the satellite as it moves through the orbit. the W axis isnormal to the orbital plane (usually is not aligned with the K axis), and the S axis is normal tothe position vector and positive in the direction of the velocity vector. The S axis is aligned withthe velocity vector only for circular orbits [39].
26

2.1 – GNSS Overview
respect to the true range, depending on the phase of the reflected signal orsignals [32]. Code, carrier phase and Doppler measurements can be affectedby multipath phenomenon, though in different ways. In the code measure-ments case, multipath can vary from few meters to over one hundred meters[29] and can be much greater in situations where only the echoes are received[40]. For phase measurements, multipath is generally much smaller, it is ofcentimeter order. Doppler measurements are also affected by the multipathproblem, Doppler measurements are the derivative of carrier phase so they areaffected by the derivative of the multipath present in the phase measurements,which is usually of centimeter order; hence the multipath effect on the velocityestimation is very small [41]. The multipath error can be the dominant error insome scenarios like urban environments, this error can be mitigated by properantenna site selection, receiver design, and error detection techniques such asRAIM and FDE.
� Shadowing is the excess attenuation of the direct path signal, due to thepropagation through foliage or other structures.
� Receiver error includes the contributions from the thermal noise error andthe effects of dynamic stress on the tracking loops. The magnitude of thiserror is dependent on the technology incorporated in a particular receiver [42].In high quality receivers, these errors are negligible for carrier phase and a fewdecimeters for code phase.
The GNSS errors are schematically represented in Figure 2.3.
27

2 – Principles of Satellite Navigation
Figure 2.3. GNSS Error Sources
2.2 Navigation Solution Estimation
GNSS positioning is based on the one-way ranging technique: the time of travel ofa signal, transmitted by a satellite, is measured and scaled by the speed of lightto obtain the PR whose equation is Eq. (2.2). Three-dimensional user coordinatesand receiver clock offset are computed using trilateration technique and PR mea-surements, details on the position estimation are provided in Section 2.2.3. Dopplermeasurements are used to compute user velocity and clock drift of the receiver, acomplete description of the algorithm used for the velocity estimation is providedin 2.2.4. In order to compute user coordinates and velocity at least four measure-ments from four satellites are necessary, due to the presence of bias and drift of thereceiver clock as unknowns. Usually more than four measurements are available soan optimization criterion has to be adopted for the PVT estimation; details on theestimation technique adopted are discussed in Section 2.2.1
2.2.1 Estimation
Estimation is the process of obtaining a set of unknowns from a set of uncertainmeasurements, according to a definite optimization criterion [43]. The estimation
28

2.2 – Navigation Solution Estimation
process can be divided in two main phases represented by measurements and processmodel.The measurement model, also referred to as observation model, is defined as afunctional relationship between the measurements and the states of the system, itis used in order to estimate the unknowns. The implicit form of the model is:
f(x, z) = 0 (2.9)
where
� f() is the mathematical model, it is defined as a theoretical system by whichone describes a set of events [44];
� x is the state vector, containing the m unknowns;
� z is the vector containing the n observations;
From Eq. (2.9) it is possible to obtain the condition and parametric form of themeasurements model:
f(z) = 0
z = f(x)(2.10)
The measurement model could be solved for the unknowns if (m >= n), if themeasurements are redundant (i.e. m > n), the solution can be estimated in someoptimal sense, finally if m = n the solution is unique and there is no space foroptimization. The adjustment is in general meaningful only in those cases in whichredundant observations are available. In a statistical sense, adjustment is a methodof deriving estimates for stochastic variables and their distribution parameters fromobservations [44]. Least Squares (LS) is by far the most common adjustment method,it will be described in Section 2.2.2. Additional equations could be consideredin order to estimate the set of unknowns even in case of measurement lack as inthe Kalman filter. This estimation technique extends the concept of LS includingknowledge of how the state vector evolves in time [45]. These additional equations,referred to as process model or system model, are used to predict the value of thestate vector along with its covariance matrix. The process model is:
x(t) = F (t)x(t) (2.11)
where:
� x is the time derivative of the state vector;
� t is time;
29

2 – Principles of Satellite Navigation
� F is the dynamics matrix.
A complete description of the process model and its key rule in the Kalman filter canbe find in [45]. In this thesis, the equations representing the system state dynamics,are included in the measurement model as shown in Section 2.5.2. The benefits ofthe inclusion of these additional equations are evaluated in Section 2.5.2.
2.2.2 Least Squares Method
The most common adjustment method used in geomatic is LS, its introduction isattributed to C.F. Gauss and its first application was on an astronomical problem[44]. LS adjustment could be divided into two groups of adjustment techniques thefirst one is the LS adjustment with conditions only, presented in Section 2.2.2, andthe second one is the LS adjustment with conditions and constraints detailed inSection 2.5.2.The optimization criterion adopted by the LS method is the minimization of theresiduals defined as:
r = z−H · x (2.12)
where:
� H is the design matrix or geometry matrix, containing the geometry of the ob-servations with respect to the state vector, it is used to project measurementsinto the vector state space;
� x is the estimated state.
A cost function could be introduced:
J = rTWr (2.13)
where W is the weighting matrix representing the different accuracy of the measure-ments. Assuming uncorrelated measurements with standard deviation σn, W is adiagonal matrix expressed by:
W =
1/σ2
1 0 . . . 00 1/σ2
2 . . . 0...
.... . . 0
0 0 . . . 1/σ2n
(2.14)
Replacing Eq. (2.12) in the expression of the cost function 2.13, you can obtain:
J = (z−H · x)T W (z−H · x) (2.15)
30

2.2 – Navigation Solution Estimation
To obtain an optimal estimate of the states, the cost function expressed in Eq. (2.15)has to be minimized:
dJ
dx= 0
d(
(z−H · x)T W (z−H · x))
dx= 0
d(zTWz− zTWHx−HT xTWz + xTHTWHx)
dx= 0
(2.16)
Using matrix calculus rules, the following derivative can be computed:
d(zTWz
)dx
= 0
d(−zTWHx
)dx
= −zTWH
d(−HT xWz
)dx
= −HTWz = −zTWH
d(xTHTWHx
)dx
= 2xTHTWH
(2.17)
replacing the previous expression in Eq. (2.16):
− 2zTWH + 2xTHTWH = 0
x =(HTWH
)−1HTWz
(2.18)
The second equation in Eq. (2.18) is the LS solution; its variance/covariance matrixCx can be easily obtained, applying the variance law propagation to Eq. (2.18):
Cx =(HTWH
)−1HTWCzWH
(HTWH
)−1(2.19)
where Cz is the variance/covariance matrix of the measurements.
2.2.3 Position Computation using Pseudorange
In this section, the algorithm employed to compute receiver position using PRs isdescribed.The algorithm is developed in East North Up (ENU)6 frame which is illustrated in
31

2 – Principles of Satellite Navigation
Figure 2.4. ENU frame, the origin is arbitrarily fixed to a point on the Earthsurface; the X-axis points toward the East; the Y-axis points toward the North; theZ-axis points upward along the ellipsoid normal
Figure 2.4. As shown in Eq. (2.2), PRs are affected by several errors as detailed inSection 2.1.3, applying all the corrections described and including all the residualerrors in the term ερ the PR equation becomes:
ρ = d+ cdtr + ερ (2.20)
where d is the satellite receiver distance which expression is:
d =√
(ES − ER)2 + (NS −NR)2 + (US − UR)2 (2.21)
6ENU is a coordinate frame fixed to the Earth surface, based on the WGS84. ENU origin andaxes are defined as the following: the origin is arbitrarily fixed to a point on the Earth surface;the X-axis points toward the East; the Y-axis points toward the North; the Z-axis points upwardalong the ellipsoid normal.
32

2.2 – Navigation Solution Estimation
where
� ES, NS, NS are the satellite coordinates expressed in the ENU frame, com-puted using ephemeris as detailed in [32];
� ER, NR, NR are the receiver coordinates expressed in the ENU frame.
Measurement equation Eq. (2.20) is not linear in the unknowns, hence it has to belinearized about a nominal value, which is the current best estimate [29].In order to linearize 2.20, it has to be expanded in Taylor series about the nominalposition x = [E0, N0, U0, cdt0] truncating the expansion at the first order obtaining:
ρ = ρ0 +∂PR
∂E|x(E−E0) +
∂PR
∂N|x(N −N0) +
∂PR
∂U|x(U −U0) +
∂PR
∂cdt|x(cdt− cdt0)
(2.22)where
� ρ0 is the is the predicted PR, i.e. the PR evaluated in the approximate pointx0;
�∂PR∂x
∣∣x
is the the partial derivative of the PR with respect to x, evaluated inthe approximate point, x.
After same manipulations Eq. (2.22) can be written as:
δρ = a∆x+ b∆y + c∆z + ∆(cdt) (2.23)
where
� a = E0−Es
d0, b = N0−Ns
d0, c = U0−Us
d0are the cosine directors of the vector form
the receiver position to the satellite;
� δρ = (ρ− ρ0) is the difference between the measured and predicted PR.
As there are k satellites, a system of k 2.23 can be written in matrix notation:
δρ =
δρ1δρ2
...δρk
=
a1 b1 c1 1a2 b2 c2 1...
......
...ak bk ck 1
∆E∆N∆U
∆(cdt)
+ ερ(2.24)
obtaining the compact expression
δρ = Hρ∆x + ερ (2.25)
where
33

2 – Principles of Satellite Navigation
� ∆x is the vector containing the unknowns (∆E,∆N,∆U,∆(cdt)), which hasto be estimated using an estimation technique such as LS;
� Hρ is the geometry matrix which contains the cosine directors;
� ερ is the vector containing the residual errors.
Finally the receiver coordinates and the receiver clock bias can be computed as:
x = x + ∆x (2.26)
To obtain the latitude, the longitude and the altitude of the receiver the followingexpression can be used [46]:
ϕ = ϕ0 +∆N
RM + h
λ = λ0 +∆E
(RN + h) cosϕ
h = h0 + ∆U
(2.27)
where:
� ϕ0, λ0, h0 are the geographic coordinates of the approximate receiver position;
� RN is the prime vertical radius of curvature;
� RM is the meridian radius of curvature.
2.2.4 Velocity Computation using Doppler measurements
GNSS receivers are able to provide the Doppler measurements representing thefrequency shift produced by the satellite receiver relative motion [32]. Using Dopplerobservables, GNSS receivers are able to compute the three-dimensional user velocity,the algorithm adopted for velocity estimation is developed in ENU frame as for theposition computation.The received frequency, fR, is related to the transmitted one, fT , by the classicalDoppler equation [32]:
fR = fT
(1− (vS − vR) · a
c
)(2.28)
where:
� vS and vR are the vectors containing respectively the satellite and receivervelocity, both referenced to a common ENU frame;
34

2.2 – Navigation Solution Estimation
� a is the unit vector pointing along the line of sight from the user to the satellite.
The dot product (vS − vR) · a is the projection of the relative velocity vector alongthe receiver satellite direction, i.e. the range rate.The Doppler shift produced by the relative motion can be easily obtained:
∆f = fr − ft = ft(vS − vR) · a
c(2.29)
Scaling the previous equation by the wavelength, λ, the expression of the range rateis obtained:
d = −λ∆f (2.30)
The measured range rate, ˙PR, is affected by the receiver clock drift, so the mea-surement is called PR rate expressed by the following formula:
˙PR = −λ(fR − fT
)(2.31)
where:
� fR is the received frequency related to the ideal received frequency by therelation: fR = fR + ∆fR. ∆fR is related to the drift of the user clock, andrepresents the rate at which the users clock is running faster or slower relativeto the system time;
� fT is the actual transmitted frequency which is related to the nominal fre-quency by the relation:fT = fT + ∆fR. ∆fT is the correction determined bythe GCS and broadcast within the navigation message update.
Eq. (2.31) can be rewritten considering the relation between the nominal values andthe actual values of the frequencies, and considering c ˙δtS = λ∆fS and c ˙δtR = λ∆fR:
˙PR = d+ c ˙δtS + c ˙δtR (2.32)
Different approaches can be adopted to compute the user velocity using PR ratemeasurements. In this research, the approach which considers known the receiverposition is adopted. This approach is immediate, ˙PR is correct for the satellite clockdrift, then replacing d with the dot product (vS − vR) · a yelds:
˙PR = (vS − vR) · a + c ˙δtR˙PR− vS · a = −vR · a + c ˙δtR
(2.33)
Introducing δρ = ˙PR−vS ·a, which is the difference between the measured and thepredicted psudorange rate, the previous equation becomes:
δρ = −vR · a + c ˙δtR (2.34)
35

2 – Principles of Satellite Navigation
Expanding the dot product in Eq. (2.34) yelds:
δρ = vERa1 − vNR a2 − vURa3 + c ˙δtR (2.35)
where:
� vER , vNR , vUR are the East North and Up components of the receiver velocity;
� a1, a2, a3 are the three components of the unit vector pointing along the lineof sight from the user to the satellite.
Considering k equations, the matrix form of Eq. (2.35) is obtained:
δρ =
δρ1δρ2
...δρk
=
a11 a12 a13 1a12 a22 a32 1...
......
...ak2 ak2 ak2 1
v (2.36)
The compact expression is:
δρ = Hρv + ερ (2.37)
Finally, the user velocity and receiver clock drift can be estimated:
v =(HTH
)−1HT δρ (2.38)
2.2.5 PVT Algorithms
In this section, the PVT algorithm developed considering a single satellite systemis explained. The algorithm could be divided in two main blocks. The first yieldsposition computation, the relative flow chart is shown in Figure 2.5; the secondblock is used for the velocity computation and the flow chart is shown in Figure2.6. The PVT algorithms were developed in Matlab environment [27] and used toprocess GNSS data in a single point mode.The main inputs of the algorithm used to compute the receiver position are GNSSobservables and GNSS ephemerides.The ephemerides are used to compute satellite position and velocity; different orbitalpropagators are implemented for the various GNSS considered, since the ephemeridesare differently parameterized; additional details on this topic will be provided inSection 2.5. The GPS orbital propagator is extensively treated in [33] and [47], forGLONASS the main reference is [31] and for Galileo details are available in [34].Raw PRs are corrected for the satellite clock error which is computed starting fromephemerides using the orbital propagator. The model adopted is shown in Eq. (2.6).
36

2.2 – Navigation Solution Estimation
Figure 2.5. Position Algorithm Flow Chart
In case of single point positioning using L1 frequency the clock error has also to becorrected for the Time Group Delay (TGD) using the following relation:
cdtL1s = cdts − tgd (2.39)
TGD correction is broadcast within the navigation message and it is related to theE1/L1 frequency but it can be easily adapted for the other frequencies using thefollowing formula:
tgdf2 =f12
f22tgd (2.40)
This correction term has to be applied only by single frequency users and it is dueto the estimation of the satellite clock offset parameters, which are based on theeffective PRN code phase as apparent with two frequency ionospheric corrections[33]. As shown in Eq. (2.6), the term cdts contains also the relativistic correction∆trel which is computed using the expression:
∆trel = F · ecc√a sinE (2.41)
37

2 – Principles of Satellite Navigation
where
� F = −4.44280763310−10 (s/m1/2);
� ecc is the orbit eccentricity;
� a is the orbital semi major axis;
� E is the eccentric anomaly of the satellites orbit.
Due to the Earth rotation during the time of signal travel, a relativistic error isintroduced, known as the Sagnac effect. It can be compensated rotating satelliteposition according to:Xcorr
s
Y corrs
Zcorrs
=
cos(ω ∗ Tof ) sin(ω ∗ Tof ) 0− sin(ω ∗ Tof ) cos(ω ∗ Tof ) 0
0 0 0
Xs
YsZs
(2.42)
where
� Xs, Ys, Zs are the satellite coordinate expressed in the Earth Centered EarthFixed (ECEF)7 frame;
� ω is the Earth angular velocity;
� Tof is the time of flight, it is the difference between the reception and trans-mission time.
PRs are then corrected for the atmospheric effects. In this research, the modeladopted for the ionosferic delay computation is the Klobuchar model. This modelis implemented using 8 parameters broadcast within the GPS navigation message.Details on the Klobuchar model are available in [36] [37].The tropospheric delay is computed using the Hophield model, a complete descrip-tion of which can be found in [48].Finally corrected PRs are used to estimate the user position; the estimation tech-nique adopted in this thesis is a Weighted LS (WLS), and the weighting matrix isrelated to the satellite elevation. Accuracy of the measurements is computed usingthe following formula [49]:
σ2ρ = σ2
URA + σ2Iono + σ2
Tropo + σ2Multipath (2.43)
where:
7ECEF frame is centered in the center of mass of the Earth, the positive Z axis goes out thenorth pole. The X-Y plane will be the equatorial plane. The X axis along the prime meridian, theY axis then set to make the system right handed.
38

2.2 – Navigation Solution Estimation
� σ2URA is the User Range Accuracy (URA) related to the satellite ephemeris
and clock, broadcast in the navigation message [32];
� σ2Iono is the accuracy related to ionospheric delay after applying the corrections
obtained using the Klobouchar model [49];
� σ2Tropo is the accuracy related to tropospheric error after applying the Hopfield
model corrections [49];
� σ2Multipath is the accuracy related to the multipath error [49].
The second block of the algorithm is used to estimate user velocity as shown inFigure 2.6. The main inputs are the GNSS PR rates and GNSS ephemerides usedto compute position and velocity of the satellite in the ECEF frame. The orbitalpropagator provides also the correction for the satellite clock drift which is obtainedusing the following formula derived from Eq. (2.6):
c ˙δtS = af1 + 2af2(t− toc) (2.44)
The raw PR rate measurements are corrected for the satellite clock error, then,as in the previous, case satellites position and velocity has to be corrected for theSagnac effect. The PR rate is defined as the time derivative of carrier phase observ-able, so the main error terms affecting it (orbital, atmospheric, multipath) can beneglected because they are the derivative of the errors effecting the phase measure-ments. Hence no further corrections has to be applied. Finally, PR rates are usedto computed receiver velocity and receiver clock drift, using a weighted LS method,in this case, the PR rate accuracy is simply assumed to be inversely proportional tosin(el), where el is the satellite elevation. The work flow of the PR rate algorithmis shown in Figure 2.6.
39

2 – Principles of Satellite Navigation
Figure 2.6. Velocity algorithm work flaw
2.2.6 Geometrical Aspects
PVT errors depend on the measurement accuracy and on the geometry of the satel-lites. Considering an a priori measurement accuracy σ0 and assuming all the mea-surements uncorrelated and with the same accuracy, the state vector variance co-variance matrix can be expressed as:
P = σ20(HTH)−1 (2.45)
The matrix (HTH)−1 is related only to the satellite position, hence it representsthe geometry of the system. Since the value of such matrix is generally greaterthan one, the accuracy is diluted so the matrix is usually defined as Dilution OfPrecision (DOP) matrix. Hence, besides measurement signal quality, positioningaccuracy depends on how possible measurement errors affect the error in the positionestimate. This is determined by the satellite geometry and is quantified by the DOP.A measure of the overall quality of the LS solution, σsol, can be obtained by takingthe square root of the sum of the parameter estimate variances:
σsol =
√√√√σ20
P∑k=1
DOP 2k,k (2.46)
40

2.3 – Reliability Theory
where P indicates the dimension of the DOP matrix. Hence every elements of thestate vector has a corresponding DOP value. In this thesis, the PVT algorithms aredeveloped in the ENU frame and the meaningful DOP parameters are listed below:
EDOP =√σ20DOP
21,1
NDOP =√σ20DOP
22,2
V DOP =√σ20DOP
23,3
HDOP =√EDOP 2 +NDOP 2
PDOP =√EDOP 2 +NDOP 2 + V DOP 2
(2.47)
where East DOP (EDOP) North DOP (NDOP) and Vertical DOP (VDOP) are theDilution Of Precision value relative to the East North Up components, respectively.
2.3 Reliability Theory
In this section basics of statistical inference and hypothesis testing are reviewed, thenFDE methods for positioning are presented. Reliability can be defined in severalways:
� applicability of a system to its purpose as a function of time;
� ability of a system to guarantee the operational performance requirementsunder given conditions during a period of time;
� probability that a system carries out the operational requirements for a periodof time;
� robustness of a device or system.
In satellite navigation, reliability is related to the probability of correct operation ofthe system and it is quantified using the failure probabilities of the components asa function of time [32].Statistical tests are widely applied in different applications, they are used to compareresults with a given standard. In testing, one seeks a judgment as to whether someestimator function is consistent with the assumption that the sample was drawn froma population with specified parameter values, such as Normal distribution with agiven standard deviation. In order to answer to this question, hypothesis8 testing
8A hypothesis is a statement about the probability distribution of a random variable.
41

2 – Principles of Satellite Navigation
approach could be adopted Hypothesis testing is used to make a decision betweena null hypothesis9 H0, assumed as true, and one or several alternative hypothesis10,H1; this method is adopted to test a claim or hypothesis about a parameter in apopulation, using data measured in a sample. The four steps of hypothesis testingare:
� state the null hypothesis related to the value for specific parameters charac-terizing a population in a null hypothesis. This hypothesis is assumed true;
� set the criteria for a decision: this is the level of significance11 and it is denotedby α;
� compute the test statistic, using a mathematical formula that allows the deter-mination of the likelihood of obtaining sample outcomes if the null hypothesiswere true;
� make a decision, the values of the test statistic are used to make a decisionabout the null hypothesis. The null hypothesis can be accepted or rejected.
Two types of potential errors are involved in a statistical test and are identifiedas type I and type II errors [7] [50]. A type I error is defined as the error ofrejecting the null hypothesis when it is true, while a type II error is defined as theerror of accepting H0 when it is actually false, and the probability of committingthis type of error is denoted by β. Two alternative decisions about null hypothesiscan be made with four possible outcomes. The possible outcomes of the test aresummarized in Table 2.1. If the probability of both types I and II error have to bereduced. Graphical interpretation of the abovementioned parameters is provided inFigure 2.7
In Figure 2.7 the bleu area, α, represents the false alarm rate, i.e., the significancelevel of the test. Whereas the area β shows the probability accepting of the nullhypothesis when the alternative hypothesis is and represents the probability of amissed detection. It is not possible to make both α and β arbitrarily small, i.e.decreasing the probability for a type I error increases the probability for a type II
9The null hypothesis is a statement about a population parameter, such as the population mean,that is assumed to be true
10An alternative hypothesis is a statement that directly contradicts the null hypothesis by statingthat the actual value of a population parameter is less than, greater than, or not equal to the valuestated in the null hypothesis.
11Level of significance refers to a criterion of judgment upon which a decision is made regardingthe value stated in a null hypothesis. The criterion is based on the probability of obtaining astatistic measured in a sample if the value stated in the null hypothesis were true.
42

2.3 – Reliability Theory
Table 2.1. Four outcomes for making a decision. The decision can be either correct(correctly reject or retain null) or wrong (incorrectly reject or retain null).
Hypothesis Decision
Retain the null Reject the null
H0 is trueCorrect decision Con-fidence level 1− α
Error Type I Signifi-cance level α
H0 is falseError Type II Proba-bility β
Correct decisionPower of the test1− β
Null Hypotesis Altenative Hypotesis
αβ
δNull Hypothesis
Alternative Hypothesis
Figure 2.7. Type I Error α and Type II Error β in an One Tailed Test
error and vice versa. Balancing type I versus type II errors depends on the purposeof the test .
43

2 – Principles of Satellite Navigation
2.3.1 Traditional RAIM
The integrity problem is fundamental for many GNSS applications and becomescrucial for aviation, where anomalies can be caused by either the satellites or theGCS, resulting in unpredictable range errors above the operational tolerance. Hencea method to provide integrity information is needed: these reasons promoted thedevelopment of the classical RAIM algorithms. There are four main sources of in-tegrity anomalies: system-allocated Signal in Space (SIS) aberrations, space segmentallocated SIS aberrations, control segment allocated SIS aberrations, and user seg-ment SIS aberrations [32]. Theoretical investigation of signal integrity monitoringfor Safety of Life (SoL) applications has started since the first GNSS constellationbecome operational. In addition to provide PVT solution, GNSS has to providetimely warnings to the users when the system should not be used; this capability isreferred to as the integrity of the system. Integrity is a measure of the trust thatcan be placed in the correctness of the solution.GNSS broadcast integrity information to the users within the navigation message,but unfortunately, this information is only available after a delay hence it is nottimely enough for real time applications. The use of faulty signals may have disas-trous results, for example in aviation applications. Due to inherent latency of GNSSintegrity information, methods to verify integrity of the signals inside the receiverhave been developed and are usually referred to as RAIM is within the receiverhence the term autonomous monitoring.The task of satisfying integrity requirements using RAIM algorithms must be func-tionally equivalent to independent external integrity monitors, such as AircraftAutonomous Integrity Monitoring (AAIM), Ground Based Augmentation System(GBAS) and Satellite-based Augmentation System (SBAS). All these techniquesuse additional infrastructure or the information provided by external sensors [51].RAIM algorithms are implemented within the receiver, hence are the only techniquesuseful to identify user level errors, such as multipath and local interference sources.For these reasons, the use of RAIM technique is investigated in this thesis.In the classical RAIM approach, measurement errors are assumed Normally dis-tributed, such assumption is not true in degraded signal environments. If only asingle blunder is present within the measurement set, methods for outlier identifi-cation work properly. However, it is more difficult to detect outliers when there aretwo or more of them [52].In this thesis, positioning reliability is considered from the point of view of statisticalreliability which is referred to as the capability of an estimation method to detectgross errors. The inputs to RAIM algorithm are:
� accuracy of the measurements;
� measurement geometry;
44

2.3 – Reliability Theory
� probabilities of false alarm and missed detection.
The outputs of the algorithm are the protection levels Horizontal Protection Limit(HPL) and Vertical Protection Level (VPL) [32]. HPL is the radius of a circle inthe horizontal plane, centered at the aircraft position that is assured to contain theindicated horizontal position with the given probability of false alarm and misseddetection. It is a function of the satellite geometry and the expected error charac-teristics, i.e., it is not affected by actual measurements.VPL is half the length of a segment on the vertical axis with center at the trueposition, which describes the region that is assured to contain the indicated verticalposition [49].HPL and VPL concepts of are graphically represented in Figure 2.8.RAIM goal is to protect against excessive horizontal position error which is defined
Figure 2.8. Horizontal and Vertical Protection Level
45

2 – Principles of Satellite Navigation
as the difference between the estimated position x and the true position x:
e = x− x
e =(HTH
)−1HTz− x
e =(HTH
)−1HT (Hx + ε)− x
e =(HTH
)−1HTHx +
(HTH
)−1HT ε− x
e =(HTH
)−1HT ε
(2.48)
As the absolute error, which cannot be observed directly, residuals are an estimationof measurement error. Hence the residual vector r defined in Eq. (2.49) can be usedfor quality check of the solution.
r = z− z (2.49)
where z is the vector of the predicted measurements whose expression is:
z = Hx (2.50)
Replacing Eq. (2.50) and the expression of the LS solution Eq. (2.18) in Eq. (2.49),an expression of the residuals connected to the measurements error is obtained:
r = z−Hx
r = z−H(HTH
)−1HTz
r =(I −H
(HTH
)−1HT)
z
r =(I −H
(HTH
)−1HT)
(Hx + ε)
r =(I −H
(HTH
)−1HT)ε
(2.51)
Two different types of RAIM methods have been developed: sequential and snap-shot algorithms.The fundamental idea of sequential algorithms is the use of a history of consecutivemeasurements which would allow comparing navigation solutions over time in orderto detect faults; the drawback of these algorithms is related to the fact that, in prac-tice, there is a short Time To Alarm (TTA) requirement for all detected integrityfaults, while actual GNSS measurement errors exhibit a high degree of correlationover longer periods (tens of seconds) [32].Confidence bounds are formed around the position estimate based upon differentsubsets of the measurements and specified performance parameters. GNSS receivers
46

2.3 – Reliability Theory
containing FDE algorithms, extension of RAIM, can not only detect the faulty satel-lite, but are able to reject it from the navigation solution, increasing the continuityof the system. These methods use a minimum of six visible satellites to identify andreject erroneous measurements, they are essentially based on statistical tests whichare detailed in Section 2.3.2.
2.3.2 Reliability Testing (Global Test, Local Test)
To detect a blunder within the measurements, the residuals could be statisticallytested; this procedure is performed using two different tests. The first one is carriedout to verify the measurement set consistency and is called Global Test (GT), if suchtest fails, i.e. the measurement set is declared inconsistent, a test to identify theoutlier, so called Local Test (LT), has to be performed. In a GT, the null-hypothesisassumes that the adjustment model is correct and the distributional assumptionsmeet reality; in the blunder-free case, the errors are assumed to be Gaussian withzero mean. The alternative hypothesis assumes that the adjustment model is notcorrect. In the GT, the statistical variable, D, used to test the null hypothesis, is thequadratic form of the residual, r defined in Eq. (2.12) , weighted by the weightingmatrix W Eq. (2.14).
D = rTWr (2.52)
D follows a central chi-square distribution with m − n degrees of freedom if theobservation errors are Normally distributed as N (0,Σ) as shown in Figure 2.9. The
Figure 2.9. Non-Central Chi-Square Density Functions in Global Testing
47

2 – Principles of Satellite Navigation
parameter m− n is the redundancy of the system defined as the difference betweenthe measurements number m and the number of the unknowns n. D is comparedwith a threshold, TG, which is usually related to the probability of false alarm andto the redundancy as shown below:
TG = χ21−α,(m−m) (2.53)
where the notation χ21−α,(m−m) indicates the abscissa corresponding to a probability
value 1− α of a χ2 distribution of (m− n) order.A common procedure consists of fixing α according to the application requirementsand letting the threshold vary with the redundancy; a typical value for the proba-bility of false alarm is 0.1% [53, 19].In the GT, the decision is taken as follows:
H0 : D ≤ TG No failure
H1 : D > TG Failure(2.54)
If H0 is rejected and H1 accepted, an inconsistency in the measurement set is as-sumed, and the blunder should be identified and mitigated. The GT is applied tothe whole set of measurements, while to identify outlier an individual measurementtest has to be carried out. In this case, the test performed is the LT. In the LT,the decision variable w adopted is the vector containing the standardized residualof the ith satellite, defined as:
wi =
∣∣∣∣∣ ri√(Cr)ii
∣∣∣∣∣ i = 1, . . . ,m (2.55)
where (Cr)ii is the ith diagonal element of the residual covariance matrix Cr. Thestandardized residuals are assumed to be Normally distributed Figure 2.10 and arecompared with a local threshold, TL, defined as:
TL = N(1−PFA/2) (2.56)
TL is defined as the abscissa corresponding to the probability value (1− PFA/2) ofa normal distribution; the largest standardized residual exceeding the threshold isregarded as a blunder. For the LT, the decision is taken as follows:
H0 : D ≤ TL The ith measurements in not an outlier
H1 : D > TL The ith measurements in an outlier(2.57)
IfH0 is rejected andH1 accepted, the measurement is flagged as blunder and could berejected or de-weighted. The assumption of a single blunder within the measurementset is not realistic in degraded signal conditions; however, it was found that datasnooping can also work with multiple blunders if it is performed iteratively [53, 25, 7].The rejection of an observation can be repeated for that epoch until no additionaloutliers are identified, or until the solution is declared impossible to check.
48

2.3 – Reliability Theory
Figure 2.10. Density Function of the normalized residual in the Local Test
2.3.3 Statistical Reliability (Internal Reliability, ExternalReliability)
The reliability measure is used to evaluate the capability to detect outliers and assessthe impact of undetectable outliers on the solution. Reliability comprises the abilityof the system to detect outliers, referred to as internal reliability, and to quantify theeffect of undetectable outliers on the estimated parameters, referred to as externalreliability [54].The smallest bias of the measurement, which can be detected by statistical testingis called Minimum Detectable Blunder (MDB), it is used as a measure of internalreliability [54]. Selecting non-centrality parameter based on some predefined valuesfor α and β, the magnitude of the blunder capable of being detected can be computedas:
MDBi =δ√
(Cr)i,i
(2.58)
where δ is the non centrality parameter which depends on the given false alarm rateα and the detectability β. The MDB represents the theoretical error limit whichcan be detected and isolated on the ith measurement. External reliability indicatesthe effect of the smallest detectable bias on the estimated parameters. Assuming abias with magnitude on the ith measurement, and that no errors are present in the
49

2 – Principles of Satellite Navigation
other measurements the external reliability e is defined as:
ei = −(HTWH
)−1HTWMDBi (2.59)
H Eq. (2.25) and W Eq. (2.14) are respectively defined in Section 2.2.3 and inSection 2.2.2. External reliability tells how large the estimation errors the testingcan be protect against by a test. It is also called Position Protection Level (PPL)[53]. Assuming that the first three elements of the state vector are the positioncoordinates; the protection level can be computed using the following formula:
PPL =√e21 + e22 + e23 (2.60)
In a similar way, the HPL is computed considering only the first two componentsof the state vector. Protection levels are not equal for different measurements, soprotection levels for all measurements are computed and the largest one is selected.
2.4 Fault Detection and Exclusion
RAIM provides a method to provide integrity information, but there are more gen-eral techniques used to identify integrity monitoring techniques such as Fault Detec-tion (FD), Fault Detection and Identification (FDI), and FDE. FD indicates thatthere is a violation of integrity, while FDI and FDE are processes used to identifyand exclude a faulty satellite. Although FDE add complexity to the navigationalgorithm, it is an essential part of navigation integrity monitoring and reliabilityassurance. In this research, FDE techniques are considered: they are an extensionof RAIM. FDE techniques use a minimum of six visible satellites and are able toexclude outliers from the navigation solution so that operations can continue with-out interruption.Reliability monitoring can be performed using all type of observables: in this re-search only PRs and PR rates are monitored in order to reduce the error in the PVTsolution in signal degraded environments.There are several approaches to providing integrity assurance of the navigation sys-tem. In this work, the main focus is on snapshot schemes using LS estimationtechniques.Integrity monitoring can be easily extended when information about the dynamicsof the unknowns are available as in the case of the Kalman filter. Details on theapplication of FDE using Kalman filter and dynamic information are available in[55] and [56].Kalman filter could provide improvements with respect to LS techniques if the stateand observation model assumptions are correct; if the equations contained within
50

2.4 – Fault Detection and Exclusion
the process model do not properly represent the dynamics of the state, a degrada-tion of the navigation solution could be observed [27].Erroneous assumptions about the system state dynamics could cause inconsistencybetween the measurements, in this case the outlier is not present in the measurementmodel but is due to the process model information.Therefore, reliability monitoring is essential, even in filtering adopting DetectionIdentification and model Adaptation (DIA) techniques as shown in [57] and [58].User dynamics for pedestrian and vehicular navigation in urban environments, con-sidered in this thesis, are difficult to represent due to the continuous variations ofthe motion, hence LS approach is preferred. This reduces the effect of an erroneousprocess model. The snapshot approaches to be discussed are, however, extendablefor the filtering application.Before introducing the various FDE techniques developed, details about the ad-ditional checks introduced such as geometry and correlation checks are providedin Section 2.4.1. These additional tests are adopted to modify, the classical FDEtechniques and to optimize their behavior for navigation in signal degraded environ-ments.
2.4.1 Geometry and Correlation check
RAIM algorithms are based on the statistical testing procedures detailed in Section2.3.2. The reliability of detecting outliers is highly dependent on the redundancyand the geometry in the navigation solution.RAIM is available when there is a minimum of five satellites visible with sufficientlystrong geometry: redundancy is essential to permit measurement consistency checks.With only five satellites available, one outlier can be detected but it is impossibleto identify which measurement is the outlier. It is also noted that more redundantmeasurements and stronger geometry will increase the capability of quality monitor-ing procedures in both detecting and identifying the outliers. RAIM performancecould be evaluated in terms of reliability and separability.Reliability is the capability to detect the outliers, while separability assesses thecapability to correctly identify the outlier from the measurements processed. Sepa-rability is of the upmost importance and represents the risk of incorrectly flagginga good measurement as an outlier.In cases of poor satellite geometry, the DOP could be very large and the naviga-tion accuracy degrades; the performance of the integrity monitoring algorithms isdegraded and large errors can occur before that the outliers are detected; hencebefore integrity monitoring application, a check is performed to screen out bad ge-ometries, which could imply erroneous detections. In [49], the integrity requirementsare demanded, both required detection probability and false alarm rate have to bemet for any location and time [29]. If the satellite geometry does not guarantee
51

2 – Principles of Satellite Navigation
both specifications the solution has to be flagged as impossible to check. It shouldbe noted that these poor detection geometry, might yield good navigation solution;however in these conditions, FDE and RAIM algorithms do not have appropriateredundancy to properly monitor the measurements, so the observations have to bescreen out carefully.The first parameter adopted to evaluate the geometry detection was δHmax definedas [29]:
δHmax = maxi
[HDOP 2
i −HDOP 2] 1
2 (2.61)
where HDOP 2i are the squared of the DOP associated with the n subset solution,
n is the number of satellites, HDOP 2 is the HDOP computed with all satellite.A threshold is set for δHmax in accordance to the integrity specifications, if thecomputed value passes the threshold, the solution is declared impossible to check.A more intuitive method, equivalent to the δHmax method was proposed in [59, 29];it is based on Approximate Radial-error Protected (ARP) defined as:
ARP = SLOPEmax × TG (2.62)
where SLOPE parameter is the ratio between the position error (horizontal or ver-tical) and the test statistic when a deterministic error is considered on a singlemeasurement and stochastic perturbations are omitted [59].Slope can be calculated from the satellite geometry and it is different for each satel-lite, as shown in Figure 2.11 the expression of the SLOPE for the ith satellite is [60]:
SLOPEi =
√A2
1,i + A22,i
Si,i(2.63)
whereA =
(HTH
)−1HT (2.64)
andS = I −H
(HTH
)−1HT (2.65)
The satellite whose bias error causes the largest position error is the most difficultto detect and it is associated to the SLOPEmax. A geometric interpretation of theARP parameter is provided in Figure 2.12. The classical parameter, ARP, considersall measurements with the same accuracy, in order to consider different weightsfor each satellite, a generalization of the ARP is considered: it is called WeightedARP (WARP) and its expression is:
WARP = WSlopemax × TG (2.66)
where WSlope is the weighted version of the slope parameter.A large blunder, within the measurement set, could cause abnormal residual in other
52

2.4 – Fault Detection and Exclusion
Figure 2.11. Slope geometric interpretation
measurements, therefore an erroneous measurement rejection. In order to avoiderroneous rejections, a technique based on the separability concept is adopted. Aparameter properly representing the separability is the correlation coefficient, γij, ofthe normalized residual wi Eq. (2.55) [61]:
γij =(Cr)ij√(Cr)ij
(2.67)
where
j ∈ {1, . . . ,m} − (i) & wj > TL
i ∈ {1, . . . ,m} & wj = max w(2.68)
If there is at least one coefficient larger than a threshold, the measurement flaggedby the LT is not rejected and the solution is considered unreliable. If each correla-tion coefficients are less then threshold, the measurement is rejected. Several FDEtechnique could be obtained combining GT LT geometry and separability check. Inthe following section the three techniques developed in this thesis will be detailed.
53

2 – Principles of Satellite Navigation
Figure 2.12. ARP geometric interpretation
2.4.2 Observation Subset Testing
Subset testing is an FDE technique based only on GT [29, 7, 19]; it can be adoptedto localize gross errors by assessing the LS residuals. However, this estimation tech-nique may spread multiple gross errors across the whole measurement set. Hencelocalization of the blunders based on statistical rejection of residuals could be verydifficult. A possible solution is to perform several LS adjustments using a subsetof the measurements in order to find a subset from which the supposed blundersare excluded. If a measurements set is declared inconsistent, all the possible com-binations of measurements are checked, i.e all the possible subsets including n + 1to m − 1 measurements, where m is the number of measurements and the n is thenumber of unknowns. Only the subset that passes the GT is declared consistentand is used to compute the navigation solution; if more subsets pass the GT, theset with the minimum statistic variable and the largest number of measurements ischosen. In this technique the separability check is not performed, because standard-ized residuals are not analyzed. A complete scheme of the algorithm implemented
54

2.4 – Fault Detection and Exclusion
Figure 2.13. Subset Testing workflow
is shown in Figure 2.13.
This method is computationally heavy because all the combinations have to bechecked, e.g. in case of 20 available satellite signals from three GNSS systems and6 unknowns, it would be necessary to assess up to 988115 subsets in one epoch.
55

2 – Principles of Satellite Navigation
2.4.3 Forward-Backward
Forward-Backward is an FDE technique that involves the use of both GT and LT toidentify and exclude the outlier. This method consists of two different steps [7, 19].The first algorithm section, called Forward, is carried out to identify and excludeerroneous measurements. In the Forward phase, preliminary checks, GT, LT andseparability check are used. This part of the algorithm contemplates the followingsteps:
1. the measurement set is preliminary tested for the integrity geometry to screenout bad geometries which could imply erroneous detections;
2. if the system has strong geometry, the GT is carried out in order to verifymeasurements consistency;
3. in case of GT failure, the LT is performed to identify erroneous measurements;
4. in case of failure of the LT, the separability check is carried out to avoiderroneous rejection of a good observation due to the mutual influence of theobservations, if no outliers are identified the solution is declared unreliable dueto contradictory results between GT and LT;
5. the measurement flagged, in the LT, as possible blunder is excluded only if itis not correlated with other measures.
The forward process is performed recursively until no more erroneous measure-ments are found and the solution is declared reliable or unreliable.
If the solution is declared reliable and k measurements are excluded (with k ≥ 2),the Backward scheme is applied to reintroduce observations wrongly excluded. TheBackward procedure use only the GT. Rejected measurements are iteratively re-introduced and the GT is performed to verify the consistency of the measurement set;the observation set which passes the GT is used to compute the navigation solutionin order to ensure that the order of the excluded measurements does not cause anunnecessary exclusion and to minimize the number of unnecessary exclusions. Acomplete scheme of the Forward-Backward technique is shown in Figure 2.14
56

2.4 – Fault Detection and Exclusion
Figure 2.14. Forward Backward workflow
2.4.4 The Danish Method
An estimation technique is robust if it only marginally influenced by the presenceof gross errors in the data. In this context, gross errors are defined as observations,which do not fit the stochastic model assumed for parameter estimation. The LSadjustment, as described in Section 2.2.2, is very susceptible to gross errors due tothe fact that erroneous observations can lead to completely wrong results and mayeven prevent convergence of the adjustment.Several sophisticated statistical methods have been applied to identify gross errorsin the LS adjustments. The idea of only using residuals combined with an iterationprocess in an automatic procedure for gross error elimination has been used by theGeodetic Institute in Denmark since long time. Such procedure was proposed bythe geodesist T. Krarup around 1968 [62] and it is denoted as Danish method. Itshowed to be a very efficient and cheap method for blunder detection.The method is an iterative de-weighting of erroneous measurements, it is definedas an iteratively reweighted LS algorithm, used to achieve consistency between themeasurements by modifying the a priori weights.
57

2 – Principles of Satellite Navigation
In this thesis, the Danish method is used for signal degraded environments in orderto minimize the effect of blunders on the LS adjustment. This technique involvesthe use of the GT, to verify the consistency of the measurements, and the LT toidentify and de-weight the outliers. As any robust estimator, it can be successfulapplied only if there are more good observations than outlying ones. The Danishalgorithm contemplates the following steps:
1. a measurement set is checked for the geometry, as in the previous FDE tech-niques, in order to screen out bad geometries which could limit detection;
2. if the system has strong geometry for the detection purpose, the GT is per-formed to verify measurements consistency;
3. in case of GT failure, the LT is performed to identify erroneous measurements;
4. in case of failure of the LT, the separability check is carried out, to verify thecorrelation among the measurements and to avoid the rejection of blunder-freemeasurement;
5. the measurement flagged as possible blunder is de-weighted only if it is notcorrelated with other measurements. The variance of the suspected measure-ment is exponentially increased (and consequently the weight is decreased) as:
σ2i,j+1 = σ2
i,0 ∗ ewi,j/TL if wi,j > TL (2.69)
where σ2i,j+1 is the variance of the ith observation after j + 1 iterations, σ2
i,0 isthe a priori variance of the observation, and wi,j is the standardized residualof the ith observation after j iterations.
If the normalized residual of the ith observation does not exceed the threshold, itsvariance is maintained, i.e. the measurement is not de-weighted. Danish processis performed recursively until no more erroneous measurements are found and thesolution is declared reliable or unreliable. The scheme of the Danish procedure isshown in Figure 2.15.
58

2.5 – Multi-constellation navigation and GNSS extension
Figure 2.15. Danish method workflow
2.5 Multi-constellation navigation and GNSS ex-
tension
The multi-constellation approach has recently attracted increasing interest amongthe navigation community due to the GLONASS modernization and the develop-ment of the new systems such as Galileo and Beidou, hence the potential 102−satellites constellation offered by the combination of observations from the abovementioned systems has obtained considerable interest among the GNSS community.Significant benefits, are obtained by the navigation users from the combined use of
59

2 – Principles of Satellite Navigation
several GNSSs due to the improved reliability, availability and accuracy especiallyin signal degraded environments such as in urban or mountainous areas. However,the multi-constellation system raises problems that must be considered, e.g. thedifferent time scale adopted by the systems which will be analyzed in Section 2.5.1.Several works demonstrate the potentiality of the combined use of GPS, GLONASSand Galileo measurements.In [63], the performance of the first receiver which took advantage of combined GPSGLONASS navigation was analyzed, in [64] a comprehensive study on Precise PointPositioning (PPP) using combined GPS/GLONASS dual frequency code and car-rier phase observations was conducted. The major errors and reduction approachespertaining to combined GPS/GLONASS positioning are discussed in [65]. In [66], avariety of mathematical and stochastic modeling methodologies and ambiguity res-olution strategies are analyzed for the multi-constellation case. The combination ofdifferent GNSSs could be a suitable approach to improve the performance of satel-lite navigation in urban scenarios. Since multi-constellation system guarantees animproved satellite availability as compared to stand-alone GPS. Enhanced accuracyand continuity of the navigation solution were demonstrated in [27]. The combineduse of GPS and GLONASS in a high sensitivity receiver provides an increased num-ber of available satellites with respect to the single system case [6] and in harsherenvironments (C/N0 on the order of 10 dB −Hz can be processed), improvementsin accuracy and availability are more apparent [9].The benefits of the multi-constellation in terms of integrity are evaluated in [55]where a RAIM scheme along with reliability and separability measures are used to as-sess integrity performance levels of standalone GPS and integrated GPS/GLONASS,GPS/Galileo and GPS/GLONASS/Galileo systems. The improved performance ofRAIM in urban environments using GPS/GLONASS combination is analyzed in[19].In [67], the performance of the combined multi-constellation considering GPS andGalileo is evaluated in the position and velocity domain, and the first complete nav-igation solution using Galileo only is evaluated demonstrating the competivenessof Galileo with respect to existing GNSS systems. The benefits of the inclusion ofGalileo measurements, performing a joint GPS/Galileo navigation solution are alsodiscussed.Although the use of multi-constellation provide benefits for the users, in several situ-ations the visible satellite number could be insufficient to obtain a position solution;because of at least five visible satellites are required to determine a position dueto an offset between the time scales12. In [26] an algorithm has been proposed to
12In the multi-constellation case five satellite are required because the systems adopt differenttime scale. The difference between the time scales has to be included in the estimation process,
60

2.5 – Multi-constellation navigation and GNSS extension
obtain a position solution with only four visible GPS/GLONASS satellites.
2.5.1 Multi-constellation navigation (GLONASS and Galileo)
GPS, GLONASS and Galileo are very similar, they are based on the same oper-ational principle as detailed in Section 2.1, but with some meaningful differences,classifiable as: constellation, signal and reference differences as summarized in Table2.2
Table 2.2. GPS Galileo and GLONASS Differences
Parameter GPS GLONASS Galileo
Constellation
Number ofSV
24Expandable
2427
Operational+ 3 spares
Orbitalplanes
6 3 3
OrbitAltitude
20200 km 19100 km 23222 km
OrbitInclination
55 deg 64.8 deg 56 deg
Ground TrakPeriod
1 Sideral Day8 Sideral
Days10 Sideral
Days
Signal
CarrierFrequencies
1575.42 MHz,1227.60 MHz,1176.45 MHz
1602 +K ∗0.5625,
1246 +K ∗0.4375, TBD
1.559-1.592MHz,
1.559-1.592MHz,
1.559-1.592MHz
MultipleAccess
CDMA FDMA CDMA
BroadcastEphemerides
Keplerian ECEF Keplerian
Reference
ReferenceFrameSystem
WGS84 PZ90.02 GTRF
Time GPS TimeGLONASS
TimeGST
scarifying one measurement, because no broadcast parameter can be used to align the time scales
61

2 – Principles of Satellite Navigation
GPS, GLONASS and Galileo systems adopt different coordinate frames to ex-press the satellite and user coordinates: WGS84, Parametrop Zemp 1990 version2 (PZ90.02) and Galileo Terrestrial Reference Frame (GTRF) whose details are in[33, 31, 34] . GPS and GLONASS reference frames are nearly coincident, but ameasurement combination from both systems require a seven parameters transfor-mation; neglecting this transformation yields a position error from a single receiverof metric order [68] the transformation between the two frame is detailed in [69].Galileo adopted GTRF, it was developed by a consortium named the Galileo Geode-tic Service Provider (GGSP) and it could be considered coincident to WGS84 thedifference between the two system is in the centimeter level [34].
The most significant difference for the scope of this thesis is related to the timescale, i.e. GPS, GLONASS and Galileo adopt different reference time scales, con-nected with different UTC realizations:
� GPS time is connected withUTC maintained by the US Naval Observatory;UTC scale is connected to the astronomical definition of time by occasionallyadjusting it of one second to keep the scale close to the mean solar time. GPStime scale is indeed continuous and so GPS time scale and UTC differ for aninteger number of seconds (called leap seconds, currently 16). Moreover GPStime and UTC are maintained by different master clocks, producing a furtherdifference of typically less than 100 ns; this difference is broadcast to the usersin the navigation message [29] [33].
� GLONASS time is based on the GLONASS Central Synchronizer time scale(analogous to the GPS master clocks) and is connected with UTC(SU). GLONASStime is adjusted by leap seconds, according to the UTC adjustments, so theydo not differ for an integer number of seconds, but only for a difference of lessthan 1 millisecond, broadcasted in the GLONASS navigation message [31].GPS and GLONASS time scales are connected by the following relation:
tGPS = tGLO + τr + τu + τg (2.70)
where:
– tGPS is the GPS time;
– tGLO is the GLONASS time;
– τr = tUTC(SU)−tGLOis broadcast within the GLONASS navigation mes-
sage;
– τg = tUTC(USNO)− tGPS is broadcast within the GPS navigation message;
– τu = tUTC(USNO)− tUTC(SU), it is broadcast within GLONASS navigationmessage, but it is not an immediate parameter.
62

2.5 – Multi-constellation navigation and GNSS extension
To perform the transformation 2.70, τu should be known, but this informa-tion is not provided in real-time. An estimation of the inter-system bias be-tween GPS and GLONASS is broadcast as non-immediate parameter in theGLONASS almanac [31], but it does not take into account the inter-systemhardware delay bias which is dependent on the specific receiver [26].
� Galileo System Time (GST) is a continuous time scale maintained by theGalileo Mission System (GMS) and synchronized to the Temps Atomique In-ternational (TAI) [34]. The time difference between GPS and Galileo is broad-cast within the Galileo navigation message and it is possible to align GPS andGalileo measurements with respect to a common time scale using parameterssuch as the Galileo to GPS Time offset (GGTO). The relationship betweenthe two system time scales is:
GGTO = tGal − tGPSGGTO = A0G + A1G [TOW − t0G + 604800 ((WN −WN0G)mod64)]
(2.71)
where:
– tGal is the GST;
– tGPS is the GPS system time;
– A0G is the constant term of the GGTO, broadcast within the Galileonavigation message;
– A1G is the rate of change of the GGTO, broadcast within the Galileonavigation message;
– t0G is the reference time for GGTO;
– WN is the Week Number;
– TOW is the time of the week;
– WN0G Week Number of the GGTO reference.
Therefore, when GPS, and GLONASS or GPS and Galileo measurements are usedtogether, the inter-system bias is included in the estimation process as unknown.The design matrix in the multi-constellation configuration could be divided in twoblocks: the first block is related to the GPS measurements, as detailed in Section2.2.5 but with an additional column of zero. The second block of the design matrixis related to the observation of the second system considered, such as GLONASS orGalileo, in this case the 4th column is zero and the 5th contains one, so the completed
63

2 – Principles of Satellite Navigation
design matrix is:
HMC =
aGPS1 bGPS1 cGPS1 1 0aGPS2 bGPS2 cGPS2 1 0
......
......
...aGLO/Gal bGLO/Gal cGLO/Gal 0 1
(2.72)
In the case of multi-constellation the state vector is:
x =
ϕλh
cdtRcdtSys
(2.73)
where cdtR is the receiver clock offset with respect to GPS time scale, and cdtSys isthe offset between the system time scales i.e. τu for GLONASS and the GGTO forGalileo.
2.5.2 GNSS Augmentation
Satellite navigation in scenarios such as urban canyons is characterized by longperiods of lack of visible satellites, in order to improve the availability of positioning,additional information could be used in the estimation process. One of the methodsdiscussed in this thesis is the conditional LS adjustment where extra conditions,representing the state dynamics, are included into the measurement model. Theconditions, of course, should properly represent the behavior of the unknowns. Theconditions are known with certain a priori accuracy. In this thesis two differentconstraint are introduced the first one is related to the altitude variation. In urbannavigation, pedestrian or vehicular, the height is usually slowly varying during brieftime intervals; for this reason a further equation, observing directly the altitudestate, can be introduced as shown below:
(haid − h0) =[0 0 1 (0)1×(n−3)
](2.74)
where:
� haid is an old estimate of the altitude, computed with low value of the corre-sponding state variance covariance matrix or with low VDOP;
� h0 is the previous altitude estimation;
� n is the number of the states.
64

2.5 – Multi-constellation navigation and GNSS extension
This condition can be included in the measurement model 2.10, allowing solutionwith only three visible satellites for single system configuration. This aiding is alsoused in case of measurements sufficient to obtain the solution, to enhance the mea-surement model redundancy and to improve the performance of FDE techniques[70]. The second constraint introduced is related to the inter-system bias. WhenGPS measurements are used along with GLONASS and Galileo observables, thedifference between the system time scales must be estimated, thus limiting the fulluse of multi-constellation, since one observation has to be sacrificed to estimate theadditional unknown.The offset between the system time scales can be considered constant in a brief inter-val [26], hence a pseudo-measurement, observing directly cdtSys, can be introduced:
(cdtSysaid − cdtSys0) =[(0)1×(n−1) 1
]·∆x (2.75)
where
� cdtSysaid is an old estimate of the parameter, computed with a low value of thecorresponding state variance/covariance matrix;
� cdtSys0 is the previous state element.
Eq. (2.75) can be included in the measurement model 2.25, allowing a multi-constellation solution with only 4 mixed visible satellites; this aiding is also usedin case of sufficient observables to enhance the measurement model redundancy asin the altitude case [27]. If both pseudo-measurements (i.e. aiding on altitude andinter-sytem bias) are used, it is possible to compute the navigation solution withonly three mixed visible satellites [70].
2.5.3 Local GNSS augmentation: pseudolites
The grooving request to navigate in all environments, such as indoors, promoted thedevelopment of augmentation systems to aid or replace GNSS. GNSS navigationhas gaps in several environmental as shown in Figure 2.16. On the horizontal axisof Figure 2.16 the urban/indoor and rural/open environments are represented; thevertical axis roughly represents altitude, from ground level all the way up to space.GNSS navigation cover much of this two-dimensional trade space (indicated by thesolid blue shape), but it can not cover the bottom left corner. High-Sensitivity (HS)GNSS receivers have helped to reduce the size of this gap (indicated by the stripedblue shape), but there still remains a gap where availability, accuracy, or reliabilityof GNSS by itself is not sufficient for many applications. In order to fill this gapaugmentation systems have to be adopted. One of the local augmentation systemcomplementary to GNSS is the pseudolite [71] [2]. Pseudolites are transceivers able
65

2 – Principles of Satellite Navigation
Figure 2.16. The navigation gap from [1]
to receive and broadcast signal in different bands and using different modulationtechniques, they can be used to create a local ground-based GNSS alternative. Theuse of pseudolites in the L1 band is of particular concern since it can create inter-ference problems with GPS and other GNSS. The main problems related to thepseudolite network are:
� interference problem
� near-far problem
Interference problems can arise, for example, when pseudolites signals overpowerthe much weaker GNSS components. Three methods could be adopted to reduceinterference problem [71]:
� Introducing a frequency offset;
� Using different pseudorandom noise codes;
� Implementing a pulsing scheme.
These could be used alone or in combination. All of them are able to reduce in-terference, but each one has complications in terms of receiver design, pseudolitenetwork design, or regulatory compliance. In order to reduce interference, the pseu-dolite signal adopted in this thesis has a pulsing scheme. It consists of transmittingpseudolite signals only during dedicated time slots. Although a GNSS receiver isessentially blinded during the pulse, it can still operate normally during the timeslots not allocated for pseudolite transmissions. This approach was adopted by [72],
66

2.5 – Multi-constellation navigation and GNSS extension
who suggested a pulsing scheme with a 10% duty cycle, i.e. pseudolite signals weretransmitted only 10% of the time. Several pulsing schemes have been proposed inthe literature and an overview of the different solutions proposed can be found in[73].The near-far problem arises when a strong pseudolite signal biases the measure-ments extracted from a weaker component. GNSS and pseudolite signals use DirectSequence Spread Spectrum (DSSS) modulation schemes and a receiver is able toseparate the different received components. Independent processing of the differ-ent components is performed by exploiting the orthogonality of the codes used forspreading the different signals. When a signal is significantly stronger than another,the receiver is unable to separate the different components and biases can be intro-duced in the range measurements.In order to receive pseudolite signals relatively few receiver modifications are re-quired, because pseudolite signals are similar to standard GNSS ones. An importantmodification that could be required for the processing of pseudolites is to accountfor potential time scale differences. A GNSS receiver determines the user posi-tion using trilateration, as detailed in Section 2.2.5, this is possible because all thesatellites are synchronized to a common time scale. Using pseudolites , locationbased on trilateration and travel time measurements is possible only if the pseu-dolites are synchronized. Pseudolites synchronization may lead to an improvementof the system complexity and to a significant deployment of the cost. Moreover,biases in the measurements could still be present due to multipath propagation.For these reasons, a second class of pseudolites operating in an asynchronous wayhas been recently suggested as alternative solutions to travel time measurements.Asynchronous systems could use different principles. The first solution is based onthe proximity principle [74, 75]. A network of devices is deployed and each deviceoperates independently continuously broadcasting its position. The user determinesits position as that of the closest Indoor MEssaging System (IMES) transmitter.This concept has been propose by Japan Aerospace Exploration Agency (JAXA)for the development of the IMES which is an extension of the Quasi-Zenith SatelliteSystem (QZSS) [76]. The proximity principle is illustrated in Figure 2.17. The useof IMES has been demonstrated for applications such as patient tracking in hos-pitals during ION GNSS 2012. The Japanese government has authorized the useof IMES operating in the GPS L1 frequency band. The second approach used forthe asynchronous pseudolite system is based on the Received Signal Strength (RSS)concept.RSS is defined as the voltage measured by a receiver’s Received Signal StrengthIndicator (RSSI) circuit and corresponds to the measured power on a logarithmicscale, this approach is detailed in Section 4.2.
67

2 – Principles of Satellite Navigation
Figure 2.17. Schematic representation of the proximity principle adopted by theIMES navigation system. The receiver estimates its position as the position of theclosest transmitter. From [2]
68

Chapter 3
GNSS Navigation: themulti-constellation opportunity
In this chapter a performance analysis of ther Galileo observables is presented; theanalysis has been carried out to characterize the quality of the Galileo observablesand to use their estimated accuracy1 as weight in the WLS algorithm for the navi-gation solution. The analysis is also useful to verify the assumption adopted for Re-ceiver Autonomous Integrity Monitoring (RAIM) algorithms, i.e. the measurementshave zero mean Gaussian distribution. The performance in the position domain ofthe European Global Navigation Satellite System (GNSS) and the first Galileo onlycomplete Position Velocity Time (PVT) are analyzed. The benefits of thei9nclusionot the Galileo measurements in multi-constellation GPS/Galileo navigation solutionare evaluated. Performance is analyzed in terms of horizontal and vertical errors inthe position and velocity domain.The last part of the chapter investigates the opportunity of GPS/GLONASS multi-constellation navigation in urban environments. The performance is evaluated interms of availability and accuracy.
3.1 GPS Galileo multi-constellation
Galileo, the European GNSS, is currently in its In Orbit Validation (IOV) phaseand only four satellites are available. The availability of the Galileo satellites allowsresearchers to investigate the potentiality of the Galileo system extending the resultsbased on the signals broadcast by the Galileo In-Orbit Validation Element (GIOVE)satellites. Although the two GIOVE satellites (GIOVE-A and GIOVE-B) did not
1The estimated variance of the measurements is used as weight in the Weighted LS (WLS) asshown in Section 2.2.2
69

3 – GNSS Navigation: the multi-constellation opportunity
allow the computation of the user position, it was possible to test the performanceof the new acquisition and tracking algorithms designed to fully exploit the benefitsof the new Galileo signals. The ranging capabilities of the Galileo experimentalsatellites has been investigated in [77].The first two IOV satellites were launched in October 2011, whereas the completeconstellation of the IOV was completed in October 2012. Using the signal trans-mitted bythe four IOV satellites, Galileo-only positioning has been possible sinceMarch 2013 when European Space Agency (ESA) started disseminating Galileoephemerides. On 12 March 2013, ESA has announced that the first autonomousposition fix using only Galileo satellite signlas was achieved. The accuracy of thefix is in the 10-meter range, fulfilling expectations since the infrastructure requiredby the Galileo system is only partially deployed.
Since March 2013, several research groups reported successful Galileo-only posi-tioning [78, 67]. Despite the race for demonstrating Galileo-only positioning, limitedanalysis has been performed to evaluate the accuracy of the measurements broadcastfrom Galileo satellites. In particular, ranging capabilities of the IOV satellites canbe assessed employing the precise orbits determined using the approach describedin [79] and available from ftp://cddis.gsfc.nasa.gov/pub/gps/products/mgex. Theaccuracy analysis is useful to determine the weights to use for the Galileo measure-ments in the GPS/Galileo multi-constellation navigation solution.
3.1.1 Galielo measurements analysis
Galileo satellites are able to provide three types of measurements: PR, Dopplermeausurements and carrier phase on three different frequencies: E1 E5 and E6. Inthis research only PR and Doppler measurements on E1bc and E5a are considered.In order to collect Galileo and GPS observables, a Javad RingAnt-G3T was mountedon the rooftop of the European Microwave Signature Laboratory (EMSL) in theJoint Research Centre (JRC) premises in Ispra (Italy). The EMSL is the highestbuilding of the area, hence it was selected in order to minimize multipath effects.The position of the antenna was carefully surveyed in order to obtain an accurateposition to use in the algorithm detailed below; the coordinates of the antenna arereported in Table 3.1. The antenna was connected to a Septentrio PolarRxS receiver
Table 3.1. Coordinates of the antenna placed on the rooftop of the EMSLin the JRC premises in Ispra
Latitude [deg] Longitude [deg] Altitude [m]
45.810361551 8.629943325 279.0016
70

3.1 – GPS Galileo multi-constellation
able to simultaneously collect GPS, GLONASS, Galileo and Beidou measurementson several GNSS bands. The equipment described is shown in Figure 3.1.Galileo measurements analysis has been carried out in order to characterize thequality of Galileo observables and to use its accuracy as weight in the WLS algorithmfor the navigation algorithm.Performance evaluation has been carried out on the E1bc and E5a frequencies.In order to compute Galileo PR and PR rate errors for the E1 frequency, GPSand Galileo observations are used together; raw PR and PR-rate measurements arecorrected for the satellite clock related errors, relativistic effects, Sagnac effect andatmospheric delays according to:
ρc = ρ+ cdtsv − cTGD − cdtu + cdtsag − dI − dT − cdtGPSGal
ρc = ρ+ ˙cdtsv − ˙cdtu + ˙cdtsag − ˙cdtGPSGal
(3.1)
where ρc and ρc are the corrected PR and PR-rate respectively. All the correctionterms have been defined in Section 2.2.5. The flaw chart of the algorithm used tocompute the PR and PR-rate errors is detailed in Figure 3.2. The main inputs ofthe algorithm are:
� GPS and Galileo precise ephemerides used to compute the satellite position,velocity and clock errors;
� raw GPS and Galileo observables;
� Global Ionosferic Map (GIM) used to compute the ionospheric delay.
GPS and Galileo measurements can be used together to estimate the navigationsolution as detailed in Section 2.5.1. Using this approach the state vector contains
Figure 3.1. Equipment used to collect GPS and Galileo observables, SeptentrioPolarRxS receiver [3] and Javad RingAnt-G3T [4] placed on the rooftop of theEMSL in the JRC premises in Ispra.
71

3 – GNSS Navigation: the multi-constellation opportunity
Figure 3.2. Schematic representation of the algorithm developed for determiningPR and PR-rate residual errors
position, velocity and receiver clock parameters. When the user position and velocityare known, the state vector is composed only by the clock parameters:
x =[cdtu, cdt
GPSGal
]v =
[˙cdtu,
˙cdtGPSGal
] (3.2)
72

3.1 – GPS Galileo multi-constellation
In this way, all the measurements are used to estimate the clock unknowns, providinga better estimation of such parameters. Galileo measurements are used to estimate
the unknowns cdtGPSGal and ˙cdtGPSGal
Due to the lack of GPS L5 measurements, a different approach is used to computeGalileo PR and PR-rate errors for the E5a frequency. Only Galileo measurementsare used in this case and the state vectors are:
x =[cdtGalu
]v =
[˙cdtGalu
] (3.3)
where cdtGalu and ˙cdtGalu are the bias and the drift between receiver time and GalileoSystem Time (GST). E5a raw PR and PR-rate measurements are corrected for thesatellite clock errors, relativistic effects, Sagnac and atmospheric effects as for E1.After computing the corrected PRs and PR-rates their residual errors are definedas:
Eρ = |ρc − d|
Eρ =∣∣∣ρc − d∣∣∣ (3.4)
Several weeks of data were collected using the antenna placed on the rooftop ofthe EMSL in the JRC premises in Ispra (Italy). Data were collected and analyzedsince December 2012; in this thesis, in order to avoid repetion of results, only theresults pertaining to the GPS week 1744 are presented. One week of data, on E1 andE5a frequencies, was used for the PR and PR-rate analysis and results pertainingto the IOVs are detailed below. PR and PR-rate errors are analyzed in terms ofRoot Mean Square (RMS), mean, maximum and STandard Deviation (STD) values.Measurements from the E1 frequency are considered as first; a comparison of thePR errors of the four IOVs is shown in Figure 3.3, the mean and the STD of the PRerrors are depicted as a function of satellite elevation and Carrier-to-Noise powerspectral density ratio (C/N0). The colored bars represent the mean of the errorswhile the standard deviation is represented by the black lines. For the satelliteelevation, a mask angle of ten degrees is adopted whereas for the C/N0, values lowerthan 35 dB-Hz are discarded.
The behavior of the PR error is similar for the four IOV: the error decreaseswhen satellite elevation and C/N0 increase. The mean error reaches a maximumvalue of 0.50 m for the IOVs with Pseudo Random Noise (PRN) 19. The errorstatistics for the four IOVs are summarized in Table 3.2. The maximum error variesfrom 1.86 m for satellite 12, to 2.47 m for satellite 19; the RMS values are similar forall satellites with a difference of less than 10 cm. In order to evaluate the thermalnoise contribution, it is possible to use two receivers connected to the same antenna
73

3 – GNSS Navigation: the multi-constellation opportunity
Figure 3.3. Mean and the standard deviation of Galileo PR errors asa function of satellite elevation and of C/N0. The error decreases whensatellite elevation and C/N0 increase.
Table 3.2. IOV E1BC PR error parameters
PRN MAX [m] RMS [m]
11 2.12 0.3112 1.86 0.3519 2.47 0.3720 2.29 0.35
in a zero-baseline configuration and consider Single Differences (SDs) removing allthe common systematic errors [29]. The SD is defined as:
SD = ρR1 − ρR2 = cdtR1−R2 + εSD (3.5)
where cdtR1−R2 is the difference between the two receivers clock, which is estimatedusing all the available measurements and it is removed to analyze the residual errorsεSD. The RMS of the SD error for the four IOVs is plotted as a function of the C/N0
in Figure 3.5. A comparison between Galileo and GPS PR errors is performed inorder to obtain a complete evaluation of Galileo performance in the E1 frequency.In this case, GPS PR errors are used as refeference.In Figure 3.6, mean and STD of the PR error of the considered systems are plotted
74

3.1 – GPS Galileo multi-constellation
Figure 3.4. Mean and the standard deviation of Galileo PR-rate errors asa function of satellite elevation and of C/N0. The error decreases whensatellite elevation and C/N0 increase.
as a function of the satellite elevation and of C/N0. From the results it clearlyemerges that Galileo PR errors (blue bars) are smaller with respect to the GPS ones(green bars). The values relative to Galileo errors are almost halved with respectto GPS. For instance, in the GPS case, the mean error reaches a maximum value of0.88 m (for an elevation of 15 degrees) whereas for Galileo this value is limited to0.50 m. Error statistics pertaining to GPS and Galileo PR errors are summarizedin Table 3.3. An analysis, similiar to that performed for the PR errors, has beencarried out on the PR-rates. First, the PR rate errors on E1 of the four IOVs areanalyzed; then the performance of the European GNSS are compared with with thatof GPS.As for the PRs, the error decreases when the satellite elevation and signal C/N0
increase. The error mean reaches a maximum value of 0.0162 m/s for IOV 11 witha STD equal to 0.0125 m/s. The figures of merit of the PR-rate error of the four
Table 3.3. GPS (L1) and Galileo (E1BC) PR errors statistics
System MAX [m] RMS [m]
GPS 4.49 0.84Galileo 2.47 0.34
75

3 – GNSS Navigation: the multi-constellation opportunity
34 36 38 40 42 44 46 48 50 520
0.05
0.1
C/N0 [db-Hz]
RM
S E
rror
[m]
E1 SD Error for each IOV
GAL 11GAL 12GAL 19GAL 20
Figure 3.5. Galileo E1 SD error as a function of C/N0
IOVs are summarized in Table 3.4. The four satellites are characterized by similarperformance, for instance, the maximum error varies from 0.0741 m/s, for satellite19, to 0.0955 m/s for satellite 12. The RMS errors are very close with a differenceof less than 2 mm/s. As for PR, GPS and Galileo PR-rate errors are compared asa function of the satellite elevation and C/N0 in Figure 3.7. The two systems havesimilar performance. The improvements brought by Galileo in term of PR-rate areless evident than in the PR case. However Galileo PR-rate errors are reduced withrespect to GPS, for instance the maximum is more than halved passing from 0.2772m/s to 0.0955 m/s. Despite this results, there is only a slight improvement in terms
Table 3.4. IOV E1BC PR-rate error parameters
PRN MAX [m/s] RMS [m/s]
11 0.0911 0.01012 0.0955 0.01119 0.0741 0.00920 0.0946 0.008
76

3.1 – GPS Galileo multi-constellation
Figure 3.6. Mean and the standard deviation of Galileo (E1BC) and GPS (L1)PR errors as a function of satellite elevation and of C/N0. Galileo error parametersare almost halved with respect to GPS.
Figure 3.7. Mean and the standard deviation of Galileo (E1BC) and GPS(L1) PR-rate errors as a function of satellite elevation and of C/N0. The twosystems has similar performance, Galileo improvements in term of PR-rate areless evident than in PR case.
77

3 – GNSS Navigation: the multi-constellation opportunity
Figure 3.8. Mean and Standard Deviation of Galileo (E1BC) and (E5a) PR errorsas a function of satellite elevation and of C/N0. A performance degradation isobserved in the Galileo E5a measurements, this degradation was not expected buta similar phenomenon was observed for GIOVE measurements.
of RMS errors with a difference lower than millimeter per second as detailed in Table3.5.
PR and PR rate errors on E5 are evaluated and compared with respect to theE1 case in order to have a complete analysis of the Galileo performance. The PRerror mean and STD of the considered frequencies, are plotted as a function of thesatellite elevation and C/N0 in Figure 3.8. Galileo E1bc and Galileo E5a PR-rateerror staitstic are detailed in Table 3.6. A performance degradation is observed inthe Galileo E5a measurements, the mean error passes from 0.48 m on E1bc to 0.83m on E5a for the weakest signal conditions. This degradation was not expected buta similar phenomenon was observed by [80] and [81] for GIOVE-A measurements.The cause of this slight degradation could be the presence of residual ionosphericerrors which are 1.8 times bigger on E5a than on E1 [82]. Despite the theoretical
Table 3.5. GPS (L1) and Galileo (E1BC) PR-rate error statistics
System MAX [m] RMS [m]
GPS 4.49 0.84Galileo 2.47 0.34
78

3.1 – GPS Galileo multi-constellation
Table 3.6. E1bc and E5a PR error statistics
Frequency MAX [m] RMS [m]
E1 2.47 0.34E5a 3.80 0.49
Figure 3.9. Mean and the standard deviation of Galileo (E1BC) and (E5a) PRerrors as a function of satellite elevation and of C/N0. The PR-rate errors obtainedfrom the two frequencies are characterized by similar performance.
superiority of the E5a signal, performance similar to that of the E1BC signal wasobserved, the maximum PR error is reduced of more than one meter when mov-ing from E5a to E1BC; also The RMS error is reduced of 15 cm. The PR-rateerror mean and STD, of the considered frequencies, are plotted as a function of thesatellite elevation and C/N0 in Figure 3.9.The PR-rate errors obtained from the twofrequencies are characterized by similar performance, as summarized by the PR-rateerror statistics detailed in Table 3.7. In order to verify the assumption, adopted for
Table 3.7. E1BC and E5A PR Rate error statistics
Frequency MAX [m/s] RMS [m/s]
E1 0.0955 0.010E5a 0.1097 0.011
79

3 – GNSS Navigation: the multi-constellation opportunity
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 20
1
2
3
4
5
6x 104 PR Error Distribution for E1 Frequency
Bin
s
PR Error [m]
Figure 3.10. Galileo PR error distribution, the measurements have Gaussian dis-tribution centered araund zero.
the RAIM algorithms, i.e. the measurements have zero mean Gaussian distribu-tion, the distribution of Galileo PR errors are analyzed. PR error distribution isdepicted in Figure 3.10. In order to remove the un-modeled residual systematicerrors the analysis is carried out using two identical receiver connected to the sameantenna performing zero base-line configuration and building the single differenceobservables. Figure 3.10 shows that the measurements have Gaussian distributioncentered to zero, validating the assumption considered above.
3.1.2 Galileo only positioning performance first PVT
On 12th March 2013, Galileo ephemerides were broadcast for the first time allowingthe analysis of Galileo only positioning. Two different PVT analyses are performed:for the first one, broadcast ephemerides are adopted and a single frequency solutionis computed, using E1 and E5a separately. In order to evaluate Galileo positioningperformance, Galileo only solution is compared with respect to the GPS only solu-tion. In the second case, broadcast ephemerides are used to analyze the performanceof Galileo only positioning using Iono-free combination. One week of data are usedfor the PVT analysis.Data were collected with a 1 Hz rate using the configuration described in Section3.1.1. Position and velocity performance is analyzed in terms of RMS and maximumerror for horizontal and vertical components.The horizontal position errors of the Galileo only positioning, using E1 and E5ameasurements, are shown in Figure 3.11. The clouds are very similar: slight im-provements are observed when Galileo E1 measurements are used confirming the
80

3.1 – GPS Galileo multi-constellation
Figure 3.11. Horizontal position errors of the Galileo only positioning, using E1and E5a measurements. The clouds are very similar: slight improvements can benoted when Galileo E1BC measurements are used confirming the results obtainedin the measurement domain.
results obtained in the measurement domain; the position error statistics are sum-marized in Table 3.8 which shows that the RMS values of Galileo E1 horizontal andvertical errors are reduced by 25 cm with respect to the E5a case, while the maxi-mum horizontal and vertical error are reduced of 2 m when E5a PRs are used. Thevertical position errors of the Galileo only positioning, using E1 and E5a measure-ments, are shown in Figure 3.12. The configurations considered guarantee similarperformance; the blue line representing the E1BC vertical position error and the
81

3 – GNSS Navigation: the multi-constellation opportunity
red line representing the E5a vertical position error are very close. Only slight dif-ferences can be noted confirming the results obtained in the horizontal plane. Theerror in the first part of the section is due to the geometry of the satellite as shownin the middle box of Figure 3.13. This error is also present in the horizontal plane,in Figure 3.11 can be noted the blue brush stroke away form the center, which cor-responds to the same initial epochs. From Figure 3.12, a jump in the vertical errorcan be noted; this is due to the change of ephemerides set. Galileo control segmentis only partially development, hence Galileo satellites can not be continuosly moni-tored so the ephenerides parameters in the first part of the test were degraded, whena new set of parameters were available an imporvement in the navigation solutioncan be noted in both horizontal and vertical channel as shown in Figure 3.13 andFigure 3.12.
In order to have a complete evaluation of Galileo position performance a compar-ison with respect to GPS is carried out. Galileo currently has only four satellites soits position performance is strongly affected by geometry limitations; hence in orderto perform a fair comparison between GPS and Galileo, similar geometry conditionsare considered and the GPS satellite geometry is artificially degraded.
In particular, the following approach is adopted:
� The Galileo only solution and its satellite geometry is computed;
� GPS satellites are then progressively excluded such that a geometry valuesimilar to that of Galileo is obtained;
� GPS only solution is computed using the selected GPS satellites.
This process is repeated for each epoch analyzed; the two solutions are comparedin the same epochs, i.e. during those epochs when the four IOVs are available.The parameter selected to quantify the geometry is the Horizontal DOP (HDOP);hence a fair comparison between the two systems is possible only for the horizon-tal component. Horizontal position errors for Galileo E1 and GPS (with a limitedDOP) are shown in Figure 3.13. The spread of the clouds provides an immediaterepresentation of the magnitude of the error and allows a simple comparison be-tween GPS and Galileo performance. The Galileo cloud (blue dots) is significantlyreduced with respect to the GPS one (red dots). In order to further investigate the
Table 3.8. E1BC and E5a Galileo Only position error statistics
RMS[m] Max [m]
Frequency Horizontal Vertical Horizontal VerticalE1 8.45 11.11 51.71 59.74E5a 8.70 11.41 49.57 57.37
82

3.1 – GPS Galileo multi-constellation
performance of the aforesaid configurations, horizontal position errors (upper box),HDOP values (middle box) and difference between HDOP using Galileo and HDOPusing GPS (lower box) are plotted as a function of time in Figure 3.14. Figure3.14 shows that the Galileo horizontal position error (blue line) is higher than theGPS one (red line) only during the initial phase when the HDOP is higher than 3.This error corresponds to the linear trend observed in Figure 3.14 where the Galileoestimated position is far away from the central cloud corresponding to the correctposition. Horizontal error parameters, such as maximum and mean, are summarizedin Table 3.9, from which it emerges that in average Galileo provides a significantreduction in the position error confirming the results obtained in the measurementanalysis. In particular, the mean position error is reduced by 2 meters passing from6 m to 4 m. Galileo maximum position error exceeds the corresponding GPS value,this is due to a poor geometry and occurs in correspondence of the linear trenddiscussed above. In order to fully exploit the potentiality of the European GNSS, aIono-free solution using E1 and E5a measurements combination is evaluated. Hori-zontal position errors for Galileo Iono-free combination is shown in Figure 3.15. TheIono-free observable is obtained in accordance with Eq. (2.7). The cloud obtainedusing Iono-free observables is very similar to the clouds shown in Figure 3.11, thesolutions are centered around the true position and a linear trend is observed due tothe poor geometry as in the single frequency cases. In order to further investigateIono-free performance, a comparison between single frequency and Iono-free solu-tions is performed in Figure 3.16. In the upper box the performance is compared inthe horizontal plane while the error for the vertical channel is shown in the lowerbox. From Figure 3.16, it emerges that the three considered configurations providesimilar performance in the position domain for both horizontal and vertical compo-nents. Iono-free combination is characterized by the lowest RMS horizontal error(8.40 m) but its maximum error is also the biggest, since the removal of the firstorder component of the ionospheric delay is paid by the amplification of the othermeasurement errors which are combined [83]. For example, multipath can be am-plified by a factor 3 with respect to single frequency measurements [29]. The samebehavior is observed for the vertical component. Statistics relative to the horizontaland vertical components for the configuration considered are summarized in Table3.10. In order to have a complete analysis of the Galileo PVT solution, velocity esti-mated using only Galileo measurements is computed and compared with respect to
Table 3.9. GPS Limited DOP and Galileo horizontal position error parameters.
Configuration Mean[m] Max [m]
GPS Limited DOP 6.03 38.57Galileo E1 3.99 51.71
83

3 – GNSS Navigation: the multi-constellation opportunity
Table 3.10. Galileo Iono-free position error statistics
RMS[m] Max [m]
Horizontal Vertical Horizontal VerticalIono-Free 8.40 11.06 57.87 64.76
the GPS limited DOP velocity solution. Horizontal velocity error of the consideredconfigurations, i.e. Galileo E1BC, Galileo E5a and GPS limited DOP are depictedin Figure 3.17. Galileo E1 and E5a solutions are nearly coincident, the solutionprovided is in the dm/s order, as expected by the literature. In the velocity domain,GPS provides the best solution, the light blue line is ever lower than the others butthe difference between the two systems is of cm/s order. Statistics relative to thevelocity horizontal error for the configurations considered are summarized in Table3.11.
The vertical velocity error of the considered configurations, i.e. Galileo E1bc,Galileo E5 and GPS are depicted in Figure 3.18. As in the horizontal plane also inthe vertical component, GPS provides a more accurate solution with respect to theGalileo configurations. The differences in terms of RMS values between GPS andGalileo are of cm/s order as in the previous case. More evident is the degradationfor the maximum value which pass form 10 cm/s for the GPS case to 50 cm/s forthe Galileo ones, this is due to the poor Galileo geometry. Galileo configurationsare characterized by similar performance and the differences are of mm/s in term ofRMS error and cm/s order for the maximum error. Statistics of the vertical velocityerror for the configurations considered are summarized in Table 3.12.
Table 3.11. Horizontal velocity error statistics for GPS Limited DOP, Galileo E1bcand Galileo E5a configurations.
Configuration RMS[m/s] Max [m/s]
GPS Limited DOP 0.0271 0.3049E1 0.0614 0.4288E5a 0.0652 0.5263
84

3.1 – GPS Galileo multi-constellation
Table 3.12. Vertical velocity error statistics for GPS, Galileo E1BC andGalileo E5a configurations.
Configuration RMS[m/s] Max [m/s]
GPS 0.0145 0.0975E1 0.0834 0.4998E5a 0.0863 0.5620
0 0.5 1 1.5 2 2.5
x 104
0
10
20
30
40
50
60Galileo Vertical Position Error
Ver
tical
Err
or [m
]
Epoch [s]
Galielo E1Galielo E5a
Figure 3.12. Vertical position error of the Galileo only positioning, using E1 andE5a measurements, as a function of time. The two lines are very close, only slightdifferences can be noted confirming the results obtained in the horizontal plane.
85

3 – GNSS Navigation: the multi-constellation opportunity
Figure 3.13. Horizontal position error of the Galileo only and and GPS(with a limited DOP). The Galileo cloud is significantly reduced withrespect to the GPS one.
0 0.5 1 1.5 2 2.5
x 104
0
20
40
60
Hor
izon
tal E
rror
[m]
Galileo L1GPS L1 DOP Limited
0 0.5 1 1.5 2 2.5
x 104
0
5
10
15
Hor
izon
tal D
OP
Galileo L1GPS L1 DOP Limited
0 0.5 1 1.5 2 2.5
x 104
0
0.2
0.4
0.6
0.8
Hor
izon
tal D
OP
Diff
eren
ces
Figure 3.14. Galileo (E1bc) and GPS (with a limited DOP) horizontal positionerror (upper box), HDOP values (middle box) and HDOP differences (lower box)as a function of the time epoch.
86

3.1 – GPS Galileo multi-constellation
Figure 3.15. Horizontal position errors for Galileo Iono-free combination. Thesolutions are centered around the true position and a linear trend is observed dueto the poor geometry as in the single frequency cases
0 0.5 1 1.5 2 2.5
x 104
0
10
20
30
40
50
60
Hor
izon
tal E
rror
[m]
Galileo E1Galileo E5Galileo Iono-free
0 0.5 1 1.5 2 2.5
x 104
0
20
40
60
80
Ver
tical
Err
or [m
]
Galileo E1Galileo E5Galileo Iono-free
Figure 3.16. Horizontal position error as a function of the time epoch forGalileo E1BC, E5a and Iono-free configuration (upper box). Horizontalposition error as a function of the time epoch for Galileo E1BC, E5a andIono-free configuration (lower box)
87

3 – GNSS Navigation: the multi-constellation opportunity
0 0.5 1 1.5 2 2.5
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
Epoch [s]
Err
or [m
\s]
Horizontal Velocity Error
Galileo E1Galileo E5GPS L1 DOP Limited
Figure 3.17. Galileo (E1BC) and GPS horizontal velocity error as afunciton of the time epoch.
0 0.5 1 1.5 2 2.5
x 104
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Epoch [s]
Err
or [m
\s]
Vertical Velocity Error
Galileo E1Galileo E5GPS L1 DOP Limited
Figure 3.18. Vertical velocity errors as a function of the time epoch, for GPSGalileo E1BC and Galileo E5a configurations.
88

3.1 – GPS Galileo multi-constellation
3.1.3 GPS/Galileo multi-constellation opportunity
Galileo performance analysis demonstrated the potentiality of the European GNSS,which could become a valid alternative to GPS. Considering the high compatibilitybetween Galileo and GPS, the European GNSS can also be adopted as aiding to theexisting GNSSs. The benefits of the inclusion of Galileo measurements are evaluatedcomputing a combined solution using GPS and Galileo together. The flaw chart ofthe algorithm developed for such multi-constellation navigation solution is describedin Figure 3.19. One week of data are used for PVT analysis; data were collectedwith a 1 Hz rate using the configuration described in Section 3.1.1. Position andvelocity performance is analyzed in terms of RMS and maximum error for horizontaland vertical components. The main inputs of the algorithm are the raw GNSS ob-servables, i.e. PR and Doppler measurements, and the broadcast ephemerides usedto compute satellites position, velocity and clock related errors. Raw measurementsare corrected for satellite clock and atmospheric errors, specifically the Klobucharand Hopfield models are adopted to reduce ionosphere and troposphere delays, re-spectively. The estimation technique used is a WLS as detailed in Section 2.2.2, themeasurement models are shown in Eq. (2.25) and Eq. (2.37) respectively for PRand PR rate. The state vectors are:
x = [∆P∆cdtGPSR ∆cdtGPSGAL]
v = [V ˙cdtGPSR˙cdtGPSGAL]
(3.6)
where x contains the receiver position ∆P and receiver clock bias ∆cdtGPSR ; ∆cdtGPSGAL
is the difference between GPS and Galileo time scales which has to be estimate, sincethe Galileo to GPS Time offset (GGTO) is currently transmitted in a discontinuous
way. v contains the receiver velocity, ∆V, receiver clock drift, ˙cdtGPSR , and the drift
between GPS and Galileo time scales ˙cdtGPSGAL.The horizontal and vertical position errors of the GPS alone and GPS/Galileo jointpositioning are shown separately in Figure 3.20; the joint solution is computedconsidering GPS/Galileo time offset as additional unknown as mentioned above.In order to present a fair comparison, the two solutions are analyzed only in thecommon epochs, i.e. during those epochs when at least one Galileo satellite isavailable. If only one Galileo satellite is available its measurements are used toestimate the GGTO parameters, hence in this case no advantages can be notedwith respect ot the GPS only case. The horizontal error is depicted in the upperbox of Figure 3.20, the lines representing the error behavior of the configurationconsidered are very close and only a slight difference can be noted. The inclusionof Galileo measurements provides a slight improvement in the horizontal solution;a slight reduction of the RMS value can be observed and a reduction of 3 meters ofthe maximum error is achieved. The vertical error is depicted in the central box of
89

3 – GNSS Navigation: the multi-constellation opportunity
Figure 3.19. Schematic representation of the algorithm developed for determiningposition and velocity errors using multi-constellation GPS/Galileo measurements.
Figure 3.20, as for the horizontal case also for the vertical component the inclusion ofthe Galileo observables provides only a slight improvements. The number of visibleGPS/Galileo satellites varies between 7 and 15 (with a mean of 10) as shown in thelower box of Figure 3.20 for open-sky conditions. Position error statistics, for GPS
90

3.1 – GPS Galileo multi-constellation
0 0.5 1 1.5 2 2.5 3 3.5
x 105
0
5
10
15
Hor
izon
tal E
rror
[m]
Epoch
GPS/GalileoGPS
0 0.5 1 1.5 2 2.5 3 3.5
x 105
0
5
10
15
Ver
tical
Err
or [m
]
Epoch
GPS/GalileoGPS
0 0.5 1 1.5 2 2.5 3 3.5
x 105
0
5
10
15
SV
Use
d in
the
Nav
Sol
Epoch
Number of IOVNumber of GPS
Figure 3.20. GPS and GPS/Galileo horizontal position error as a functionof the time epoch (upper box). GPS and GPS/Galileo vertical position erroras a function of the time epoch (middle box). Number of visible GPS/Galileosatellites (lower box).
and GPS/Galileo multi-constellation solution, are summarized in Table 3.13. Thehorizontal and vertical velocity errors for GPS and GPS/Galileo configurations areplotted in Figure 3.21. In the velocity domain the benefits of Galileo are less evidentthan in the position domain. This is probably due to the increased variance of theGalileo PR rate measurements highlighted in Section 3.1.1. The inclusion of Galileomeasurements provides a reduction of 1 mm/s for both horizontal and vertical RMSerrors and a reduction of 2 cm/s for the maximum error values as detailed in Table3.14.
Table 3.13. Horizontal and vertical position error statistics for GPS andGPS/GALILEO multi-constellation positioning.
RMS[m] Max [m]
Frequency Horizontal Vertical Horizontal VerticalGPS Only 3.34 4.37 14.12 14.78
GPS/Galileo 3.21 4.32 11.06 14.22
91

3 – GNSS Navigation: the multi-constellation opportunity
0 0.5 1 1.5 2 2.5 3 3.5
x 105
0
0.02
0.04
0.06
0.08
0.1
0.12
Hor
izon
tal V
eloc
ity E
rror
[m/s
]
Epoch
0 0.5 1 1.5 2 2.5 3 3.5
x 105
0
0.02
0.04
0.06
0.08
0.1
0.12
Ver
tical
Vel
ocity
Err
or [m
/s]
Epoch
GPSGPS/Galileo
GPSGPS/Galileo
Figure 3.21. GPS and GPS/Galileo horizontal velocity error as a function of thetime epoch (upper box). GPS and GPS/Galileo vertical velocity error as a functionof the time epoch (lower box)
Table 3.14. Horizontal and vertical velocity error statistics for GPS andGPS/Galileo multi-constellation velocity solution.
RMS[m/s] Max [m/s]
Frequency Horizontal Vertical Horizontal VerticalGPS Only 0.010 0.014 0.105 0.171
GPS/Galileo 0.009 0.013 0.085 0.151
3.1.4 Main results
� PR analysis demonstrates that IOV measurements are characterized by similaraccuracies, error is of metric order.
� E5a signal has performance similar to that of the E1BC signal.
� PR-rates analysis demonstrates that the four Galileo satellites provide similarmeasurement accuracies and differences are of mm/s order.
� Galileo PR errors is halved with respect to Global Positioning System (GPS).
� In both position and velocity domains the comparison between Galileo andGPS demonstrates Galileo potentiality. In the velocity domain the configu-rations considered are characterized by similar performance with differences
92

3.2 – Urban Navigation multi-constellation opportunity GPS/GLONASS
lower than 2 cm/s.
� The use of multi-constellation GSP/Galileo shown only a slight reduction ofmaximum positioning error with respect to the GPS-only case.
� Galileo Iono-free combination is characterized by the lowest RMS horizontalerror (8.40 m) but its maximum error is also the biggest.
3.2 Urban Navigation multi-constellation oppor-
tunity GPS/GLONASS
In signal-degraded environments such as urban canyons or mountainous areas, GNSSsignals are blocked or strongly degraded by natural or artificial obstacles. Themulti-constellation approach, using GPS and Galileo together as proposed in Sec-tion 3.1.3, is not useful in these scenarios because of the limited Galileo availability.Galileo has only four satellites hence the improvements provided by GPS/Galileomulti-constellation is very limited in urban scenarios. As aiding to GPS, GLObalNAvigation Satellite System (GLONASS) is currently the main candidate in a multi-constellation configuration: it is fully operational and its inclusion provids an im-provement of the satellite availability. In this section the PVT algorithm developedfor GPS/GLONASS multi-constellation will be introduced. The algorithm is imple-mented in Matlab and processes GPS and GLONASS data in single point mode.The flaw chart of the algorithm is shown in Figure 3.22.Main inputs of the algorithm are the GPS and GLONASS raw measurements, i.e.PR and Doppler shift, and the GNSS ephemerides, used to compute satellite po-sition and velocity and clock related errors. Two different orbital propagators areimplemented for the considered GNSS because the ephemerides are differently pa-rameterized as described in Section 2.5.1. Raw measurements are corrected for satel-lite clock and atmospheric errors, Klobuchar and Hopfield models are adopted toreduce ionosphere and troposphere delays respectively. For GLONASS ionosphericcorrections, a modified Klobuchar model is developed in order to consider the differ-ent frequencies used. The estimation technique used is the WLS detailed in Section2.2.2; the measurement models are shown in Eq. (2.25) and Eq. (2.37) respectivelyfor PRs and PR-rates. The state vectors are:
x = [∆P∆cdtGPSR ∆cdtGPSGLO]
v = [V ˙cdtGPSR ](3.7)
where x contains the receiver position, ∆P, and receiver clock bias, ∆cdtGPSR .∆cdtGPSGLO is the difference between GPS and GLONASS time scales which has tobe estimate even if a parameter to align the two time scales is broadcast within
93

3 – GNSS Navigation: the multi-constellation opportunity
Figure 3.22. GPS/GLONASS multi-constellation PVT algorithm flaw chart
the GLONASS navigation message. The use of the broadcast parameter is notsuitable for GPS/GLONASS multi-constellation navigation because the broadcastparameter does not take into account the delay introduced by the receiver on themeasurements, i.e. GPS and GLONASS signal are processed using different chainwithin the receiver front-end, so a different delay is introduced. In order to considersuch hardware delay, ∆cdtGPSGLO has to be estimated as additional unknown in thenavigation solution. v contains the receiver velocity, ∆V, and receiver clock drift
94

3.2 – Urban Navigation multi-constellation opportunity GPS/GLONASS
Figure 3.23. Reference trajectory followed by the user during the urban test. Atopographical approach is used for generating a reference solution, the trajectoryconsidered has a polygonal shape, whose vertexes are surveyed by a total station.
˙cdtGPSR .2
In order to demonstrate the opportunity offered by combining GPS and GLONASSfor urban navigation, several test has been performed. The tests were carried out inCentro Direzionale of Naples (Italy), typical example of urban canyon; many GNSSsignals are blocked by skyscrapers or are strongly degraded by multipath problems.The test scenario and the trajectory adopted for tests are shown in Figure 3.23. Inorder to verify the performance of the configuration considered a reference trajectoryis adopted. A topographical approach is used for generating a reference solution,specifically the considered trajectory to travel is a polygonal, whose vertexes aresurveyed by a total station (consisting of an electronic theodolite among with a dis-tance meter). In Figure 3.24 the yellow markers are the vertexes surveyed and thetotal station is pointed in green (the distance between the station and the farthestvertex is about 120 m). Using range and angular measurements the vertex positionsrelative to the total station are computed; to frame the coordinates in an absolutereference system, two GPS geodetic receivers are placed in the area, indicated asBase 1 and 2 in Figure 3.24. Base 1 is coo located with total station, the directionBase1-Base 2 is assumed as reference for the angular measurements. To associatean epoch to each surveyed vertex, the rover receiver is equipped with an externaldevice (a button) used to mark the transit on the vertexes. Finally the points amongadjacent vertexes are obtained by linear interpolation assuming constant velocity ineach segment. The position accuracy of the surveyed vertexes is of centimeter order.
2The drift between GPS and GLONASS time scales is not included in the navigation solution,because it is neglictable due to the high stability of the time scales.
95

3 – GNSS Navigation: the multi-constellation opportunity
Figure 3.24. Reference Solution obtained trrough a topographic survey.
3.2.1 GPS/GLONASS multi-constellation
In this section, the GPS/GLONASS multi-constellation opportunity is demonstratedin the above mentioned environment. Several GNSS configurations are consideredand analyzed, differing each other for the satellite system used and for adoption ofaiding. The base-line configurations are:
� GPS only;
� multi-constellation GPS/GLONASS.
In order to enhance the performance of the considered configurations, equationsrepresenting the dynamic of the unknowns are introduced. This process is calledaiding. The aided configurations could include pseudo-measurements on the altitude(denoted with H at the end of the corresponding baseline name), on the inter-system time offset (indicated with T) or both (indicated with HT) hence the aidedconsidered configurations are:
� GPS considering altitude aiding (GPS H);
� GPS/GLONASS multi-constellation considering altitude aiding (GG H);
96

3.2 – Urban Navigation multi-constellation opportunity GPS/GLONASS
� GPS/GLONASS multi-constellation considering inter system bias aiding (GGT);
� GPS/GLONASS multi-constellation considering both aiding (GG HT).
The comparison is carried out in terms of solution availability, defined as the per-centage of time mission when solution is available, and position accuracy; for afair comparison, accuracy analysis is performed considering only the solution com-mon to all configurations (i.e. if GPS fix is available) with good geometry PositionDOP (PDOP) less than 10.The equipment used for the test is a NovAtel FlexPak-G2 single frequency receiverable to track GPS and GLONASS; to the receiver was connected an Antcom ActiveL1/L2 antenna. The used devices are showed in Figure 3.25. The data collectionis a pedestrian test Figure 3.26 and was carried out in the scenario described inSection 3.2 typical example of urban canyon. The total duration of the test is about30 minutes the total distance travelled is about 2.5 km. First of all, a comparisonin term of solution availability is performed; the comparison between the base-lineconfigurations shown that the GLONASS measurement inclusion provides an en-hancement of about 5% with respect to GPS only case. A graphical representationof the solution availability is provided in Figure 3.27; the enhancements due to theinclusion of GLONASS measurements are highlithed in the circled areas. Severalfix are obtained where GPS only does not guarantee a solution. In order to furtherimprove the solution availability, additional equations are introduced in the mea-surement model; the use of pseudo-measurements affects the solution availability,allowing a GPS fix with only 3 visible satellites or a GPS/GLONASS fix with only 4(aiding on altitude or on inter system bias) or 3 mixed visible satellites (both typesof aiding). The use of aiding provide enhancements in terms of solution availabilitywhich reaches the maximum value of 89% for the GG HT configuration. The valuesof the solution availability of the configurations considered are summarized in Table
Figure 3.25. Equipment: NovAtel FlexPak-G2 single frequency receiver andAntcom Active L1/L2 antenna.
97

3 – GNSS Navigation: the multi-constellation opportunity
Figure 3.26. Pedestrian test carried out in Centro Direzionale of Naples typicalexample of urban canyon. The total duration of the test is about 30 minutes thetotal distance travelled is about 2.5 km.
3.15. The accuracy analysis is carried out in terms of RMS and maximum errors
Table 3.15. Solution availability values of the configurations considered.
Solution Availability [%]
GPS GPS H GG GG H GG T GG HT79 86 84 88 86 89
for horizontal and vertical components. First of all, the benefits of the inclusionof GLONASS measurements are evaluated considering the base line configurations.The horizontal and vertical errors are plotted as a function of time in Figure 3.28.GPS/GLONASS multi-constellation solution demonstrates improved performancewith respect to GPS only for all the parameters considered. The RMS values arereduced of one meter for both horizontal and vertical components. More evident isthe improvement in the maximum error which is reduced of 8 meters in horizontalplane. Errors statistics for the base-line configurations are summarized in Table3.16.
The use of the altitude aiding improves significantly the performance in termsof both RMS and maximum position errors for both horizontal and vertical com-ponents. Such enhancements are clear for both GPS only and GPS/GLONASScases. Horizontal and vertical errors of the configurations adopting altitude aidingare shown in Figure 3.29. As expected the vertical component of the solution mainlytakes advantage of the aiding, because the equation adopted properly represents theslow variations of altitude, typical of land navigation. The RMS values, of the aidedconfigurations, are reduced of 2 meters with respect to the base-line configurations,
98

3.2 – Urban Navigation multi-constellation opportunity GPS/GLONASS
Figure 3.27. Solution availability as a function of time for GPS only andGPS/GLONASS multi-constellation solutions.
Table 3.16. Horizontal and vertical error statistics for GPS and GPS/GLONASSmulti-constellation solutions.
Configuration RMS[m] Max [m]
Horizontal Vertical Horizontal VerticalGPS Only 7.7 5.7 47.2 32.2
GPS/GLONASS 6.8 4.7 39.0 29.5GPS H 5.3 3.4 30.7 7.1GG H 5.6 3.2 31.0 6.8GG T 6.8 4.7 39.0 29.5
GG HT 5.6 3.2 31.0 6.8
for both horizontal and vertical components. The improvements are more evidentwhen the maximum errors values are considered. The vertical errors are reduced bya factor 4 passing from 32.2 m to 7.1 m for the GPS and from 29.5 m to 6.8 m for the
99

3 – GNSS Navigation: the multi-constellation opportunity
Figure 3.28. GPS and GPS/GLONASS multi-constellation horizontal position er-rors as function of time (upper box). GPS and GPS/GLONASS multi-constellationvertical position errors as function of time (lower box).
GPS/GLONASS case. The benefits on the horizontal component can be explainedconsidering that the pseudo-measurement observes directly the altitude, practicallyconstraining it and allowing the actual measurements to estimate mainly the otherstates; on the other hand if a blunder is present, it will strongly affect the horizon-tal estimation. Statistics of the horizontal and vertical errors for the configurationadopting aid on altitude are summarized the 3rd and 4th raws of Table 3.16.The use of multi-constellation implies the ”sacrifice” of one measurements to esti-mate the additional unknown as detailed in Section 2.5.1; in order to fully exploit thepotentiality of GPS/GLONASS multi-constellation navigation, an equation repre-senting the constancy of the inter-system bias is introduced. Horizontal and verticalerrors of all considered GPS/GLONASS multi-constellation are shown in Figure3.30. The use of such aiding does not help significantly the estimation process, i.e.there is no benefit in terms of position accuracy as clearly emerges comparing raw 2and raw 5 of Table 3.16. Its effect is however notable its effect on solution availabil-ity, which reaches the maximum value of 89% when also altitude aiding is used. Theuse of the both aiding improved the performance in terms of RMS and maximumerrors with respect to the base-line configuration for all the parameters considered,but does not improve the performance with respect to the configuration with onlyaltitude aiding.
100

3.2 – Urban Navigation multi-constellation opportunity GPS/GLONASS
Figure 3.29. Horizontal (upper box) and vertical (lower box) errors as a func-tion time. Comparison between configurations adopting altitude aiding andbase-line configurations. The vertical component of the solution mainly takesadvantage of aiding, because the equation adopted properly represents theslow altitude variations.
Figure 3.30. Horizontal (upper box) and vertical (lower box) errors as a func-tion of time. Comparison between GPS/GLONASS base-line configuration andconfiguration adopting altitude aiding and configuration adopting both aiding.
101

3 – GNSS Navigation: the multi-constellation opportunity
3.2.2 Main results
� GPS/GLONASS multi-constellation shows evident improvements with respectto GPS only in terms of solution availability and accuracy.
� The use of the altitude aiding improves significantly the performance in termsof both RMS and maximum position errors for both horizontal and verticalcomponents.
� Inte-system bias aiding use, improves mainly the solution availability.
� The use of both type of aiding improves solution availability which is doubledwith respect to the base-line configuration, while no imprvement are noted interms of accuracy with respect to the use of altitude aiding only.
102

Chapter 4
Pseudolite Positioning
In this chapter, an overview on pseudolite navigation system is provided. At first re-sults obtained using synchronized pseudolites are analyzed and the problems relativeto the synchronization process are investigated. A solution for the synchronization,using relative positioning is proposed. The algorithm developed is validated us-ing simulated observables. Finally, the Received Signal Strength Indicator (RSSI)concept is introduced and positioning using Received Signal Strength (RSS) mea-surements is described.
4.1 Synchronous pseudolite navigation
A pseudolite system operating in synchronous mode extends the usage of satellite-based positioning methods as described in Section 2.5.3, into environments whereGlobal Navigation Satellite System (GNSS) signal coverage is inadequate. Psudo-lites can operate in the Global Positioning System (GPS) L1 band and potentiallyenable indoor navigation with an accuracy comparable to that of standard GNSSreceivers when synchronization is obtained. Decimeter level navigation was howeverdemonstrated using pseudolite systems only in relatively benign environments [84]such as open-sky or in a large hangar where it was possible to mitigate the impactof multipath propagation using directive antennas. A schematic representation ofthe system adopted for this thesis is provided in Figure 4.1. The main componentsof the systems and their roles are:
� 4 pseudolites operating in the GPS L1 band and able to broadcast continu-ous and pulsed signals. Each pseudolite can be operated in synchronous andasynchronous manner;
� a Master Control Statio (MCS) along with a software tool able to coordinateand synchronize the different pseudolites and computing the synchronization
103

4 – Pseudolite Positioning
parameters for the different devices;
� radio modems used for the communication between the components of thesystem;
� 2 Fastrax receivers. The first one is connected to the MCS and is able to collectGPS and pseudolite measurements. The second is used as rover receiver: it isa modified receiver able to process GPS and pseudolite signals. A view of theFastrax rover receiver is provided in Figure 4.2.
The pseudolite system is able to provide signals with the same format as that ofGPS L1 signals; the system is a Commercial Off-the-Shelf (COTS) specifically itis provided by Space System Finland (SSF) all the details about the system areavailable in [85]. When used for this application, standard GPS receivers should beable to acquire and track the signals transmitted by the pseudolites and compute anavigation solution. The MCS can synchronize the system either to the GPS timescale or slave it to the clock of a single pseudolite denoted as Master Pseudolite(MPL). The limitation of such architecture is that the MCS has to be able toaccurately measure the PR of the different pseudolites . In particular, the MCSperforms synchronization process exploiting the knowledge of its relative distanceswith respect to the different pseudolites. In particular:
� the MCS must have all the pseudolites in Line Of Sight (LOS);
Master Control Station
Serial port connection
Fastrax MCS receiver
GPS and pseudolite signal
reception
Radio Modem
PL control
Radio Modem
Radio Modem
Radio Modem
Figure 4.1. Schematic representation of the architecture of the pseudolite system.
104

4.1 – Synchronous pseudolite navigation
� multipath and other propagation errors have to be sufficiently small not tohinder the synchronization process.
The MCS software performs several checks to verify the synchronization level. Ifthe checks are not passed, the synchronization process is restarted without achiev-ing even partial results. When operated singularly, pseudolites can be used forasynchronous navigation using for example, an approach based on Carrier-to-Noisepower spectral density ratio (C/N0) measurements which are not affected by clockerrors. For this reason, two types of tests were conducted:
� Synchronous tests : the synchronous system has been tested using two differentmeasurement units; the Fastrax receiver or a customized setup involving theuse of two u-blox LEA-6T receivers. More details relative to the synchronoustests and the results achieved are provided in Section 4.1.1.
� Asynchronous tests : the RSS approach which will be described in Section 4.2and is used with pseudolite system described above.
More details relative to the tests and the results achieved using synchronized pseu-dolites are provided in Section 4.1.1.
105

4 – Pseudolite Positioning
Figure 4.2. View of the rover Fasttrax receiver which is able to jointly processGPS and pseudolite signals.
4.1.1 Double Differences Approach
The synchronous pseudolite system described in Section 4.1 has been deployed underdifferent configurations. Several problems, mostly related to the synchronization ofthe different nodes of the system, have been encountered. For this reason, severaldata collections were conducted in different environments.The first test was conducted in a large meeting room of about 7 m ×10 m. Fourpseudolites were used and placed in the corners of the room. The control softwareof the MCS was used to manage the reference Fasttrax receiver. A view of theroom with the system deployed is shown in Figure 4.3. A local reference frameis established with the origin in the upper left corner of the room and the axesoriented as indicated in Figure 4.4. Figure 4.4 also shows the positions of the fourpseudolites (red dots) used for the experiment and the location of the antenna ofthe MCS (blue dot). The locations, in the local frame, of the four pseudolitesand of the MCS are provided in Table 4.1. Several tests were conducted andmeasurements are obtained using a u-blox LEA-6T receiver. Two configurations areconsidered: using a laptop or an Android phone with a suitable Android application;no differences were expected and observed when using the two configurations. The
106

4.1 – Synchronous pseudolite navigation
Figure 4.3. Experiment conducted in a large (7 m × 10 m) meeting room. Fourpseudolites were placed at the corners while the antenna of the reference receiverwas installed approximately in the centre of the room.
Table 4.1. Location of the four pseudolites and MCS used for the meeting room tests.
Device x [m] y [m]
PL1 5.36 10.545PL2 6.57 0.2PL3 0.2 0.14PL4 0.87 10.52
MCS 3.74 5.38
use of an Android phone simplifies the data collection operations reducing the loadto be carried during the experiments.Two types of experiments were carried out:
� repeatability tests : the user performed several loops around a large tablepresent in the meeting room trying to repeat always the same trajectory. Thequality of the navigation solution is assessed by comparing the different tra-jectories estimated for the different loops. A high consistency level of thenavigation solution indicates the good performance of the system.
� control point tests : several control points were placed in the meeting room.The locations of the control points were carefully determined by surveying theroom. For each control point data were collected and used to estimate theuser position.
107

4 – Pseudolite Positioning
Figure 4.4. Local reference frame established for the tests conducted inthe large meeting room.
The location of the control points for the meeting room tests are provided in Table4.2. A first series of tests was conducted in synchronous mode. To this end thesoftware provided by SSF for managing the MCS and perform pseudolite synchro-nization was employed. According to [86], the MCS should require several minutes(about 30 minutes) to achieve precise synchronization. Unfortunately and despiteseveral attempts, it was not possible to achieve the required level of synchronization.Despite significant efforts, precise synchronization was never achieved. The meetingroom used for the first series of tests is characterized by a much lower size thanthe scenarios considered in [84]. Although the synchronization issue is still under
108

4.1 – Synchronous pseudolite navigation
Table 4.2. Location of the control points placed in the meeting room.
Control Point x y
CP1 5.87 7.88CP2 5.87 5.88CP3 5.87 3.88CP4 5.37 2.38CP5 3.87 0.88CP6 2.87 2.38CP7 2.87 2.38CP8 2.87 7.38
investigation, it is noted that this problem is probably inherent to the system andthe environment selected for the tests. Multipath and fading are probably causingsignificant problems to the synchronization process. This fact highlights one of thelimitations of indoor synchronous navigation.In order to overcome the synchronization problem and to analyze the measurementerrors, a relative positioning approach has been implemented. Two u-blox LEA-6Tdevices were used as reference and rover receivers, respectively. The basic principlebehind this approach is that reference and rover receivers are able to provide PRmeasurements modeled as:
ρrov,i = drov,i + brov + bpl,i + ηrov,i
ρref,i = dref,i + bref + bpl,i + ηref,i(4.1)
where drov,i and dref,i are the geometric distances between rover/reference receiversand the ith pseudolite. brov and bref are the clock biases of the rover and referencereceivers and bpl,i is the clock bias of the ith pseudolite. bpl,i is the synchronizationerror which should be compensated by the MCS. ηrov,i and ηref,i are residual un-modeled errors. The synchronization error, bpli , can be removed by consideringsingle PR differences:
∆ρi = ρrov,i − ρref,i = drov,i − dref,i + brov − bref + ηrov,i − ηref,i. (4.2)
Since, the geometric distance between the reference receiver and the ith pseudoliteis known is then possible to construct new measurements free of pseudolite synchro-nization errors:
ρi = ∆ρi + dref,i = drov,i + ∆b+ ∆ηi (4.3)
where ∆b = brov − bref and ∆ηi = ηrov,i − ηref,i. Note that Eq. (4.3) has the samefunctional form of the PRs adopted for GNSS positioning [32] and in particular asingle clock bias term, ∆b, is present. This term is common to all the pseudolite
109

4 – Pseudolite Positioning
measurements and can be estimated by adding it as unknown in the navigation so-lution Section 2.2.5 and Eq. (2.20).Note that the principle described above is valid only if the reference and rover re-ceivers are accurately synchronized. In particular, the pseudolite clock bias term,bpl,i, is time-varying and imperfect cancellation will occur in Eq. (4.2) if synchro-nization errors are present.In order to collect valid pseudolite measurements using the u-blox receivers syn-chronization process performed by the MCS was disabled. In particular, the u-bloxreceivers experienced continuous losses of lock due to the jumps in the Dopplerfrequency of the transmitted pseudolite signals introduced by the MCS during thesynchronization process. After disabling MCS synchronization, reference and roverreceivers were able to correctly acquire and track the pseudolite signals. In this way,the system was effectively running in asynchronous mode. The two receivers usedthe time stamp embedded in one of the pseudolite signals to extract the system timeand provide PR measurements.Corrected single differences (4.3) were formed and a custom navigation solution al-gorithm was developed to determine the user position. Unfortunately, the algorithmdeveloped was unable to converge given the data collected due to unaccounted er-rors probably due to multipath and fading problems. As already mentioned theseunaccounted errors were ascribed to residual synchronization errors. In order toinvestigate this hypothesis, double PR differences were formed:
∇∆ρi,j = ∆ρi −∆ρj. (4.4)
In order to verify the consistency of the observables, the double differences measuredwere compared with respect ot the simulated ones as described in Section 4.1.2.
4.1.2 Simulated Approach
In order to investigate the cause of the lack of convergence of the algorithm devel-oped, a simple simulation has been carried out.The simulation scenario is shown in Figure 4.5: an area with size comparable tothat of the meeting room, where the tests were performed, was considered alongwith a user moving along a square trajectory. Synthetic corrected single differences(4.3) were generated assuming the pseudolite locations indicated in Figure 4.5 andconsidering that the antenna of the reference receiver is co-located with that of theMCS. In this case, the navigation solution algorithm developed was always con-verging to the correct user location. This fact can be seen by the perfect agreementbetween the simulated (continuous blue line) and estimated (red circles) trajectoriesin Figure 4.5. This perfect agreement is also due to the fact that the term, ∆ηi,was ignored in the simulations. This test allowed debugging the navigation solution
110

4.1 – Synchronous pseudolite navigation
algorithm developed and determining that the lack of convergence was due to un-accounted errors in the corrected single differences obtained using real data.The double differences obtained for the scenario simulated in Figure 4.5 are shown
in Figure 4.6. Since the user is repeating the same trajectory describing a square,the double differences oscillate periodically. A similar behavior was expected for themeasurements obtained experimentally. The double differences of the PRs collectedfrom the four pseudolites during a repeatability test are shown in Figure 4.7. FromFigure 4.7 it is noted that a clear oscillatory behavior is present, due to the periodicrepetition of the same trajectory, but biases are clearly observable. In particulareach measurement is characterized by a device dependent bias. This is likely dueto the synchronization error mentioned before: measurements are taken at slightlydifferent epochs and the clock drift of the pseudolite local oscillator introduces biaseswhich can lead to errors up to 50 meters. This fact can be clearly observed Figure4.7. In addition to this, the biases are time-varying and thus difficult to estimate.In order to overcome the difficulties encountered during the first test, i.e. the lack ofsynchronization between reference and rover measurements, a new pseudolite topol-ogy was considered. In the new approach an additional pseudolite, indicated asMPL, was introduced in order to synchronize both rover and reference receivers toa common time scale. Hence, the new configuration was composed by 5 pseudoliteswhere an additional device denoted MPL was placed in front of the MCS. Thecoordinates of the MPL are provided in Table 4.3 in the local frame defined in the
0 1 2 3 4 5 6 70
2
4
6
8
10
12
x [m]
y [m
]
PL1
PL2PL3
PL4
MCS
Figure 4.5. Simulation scenario adopted to investigate the properties ofthe PR double differences.
111

4 – Pseudolite Positioning
50 100 150 200 250
-8
-6
-4
-2
0
2
4
6
8
Time [s]
Pse
ud
ora
ng
e D
ou
ble
Diffe
ren
ce
s [
m]
DD 1-1
DD 2-1
DD 3-1
DD 4-1
Figure 4.6. Simulated PR double differences when considering the simula-tion scenario in Figure 4.5.
112

4.1 – Synchronous pseudolite navigation
50 100 150 200 250
-50
-40
-30
-20
-10
0
10
20
Time [s]
Pse
ud
ora
ng
e D
ou
ble
Diffe
ren
ce
s [
m]
DD 1-1
DD 2-1
DD 3-1
DD 4-1
Figure 4.7. Double differences of the PR collected from the four pseu-dolites using two u-blox receivers. Meeting room, first data collectioncampaign, repeatability test.
previous section. The MPL is scarified to provide a common synchronization sig-nal, i.e. timing information of the transmitted signal should have been used by thereference and rover receivers to initialize their local clocks and provide synchronousmeasurements. For this reason, the MPL was started before the other pseudolites.This strategy also provided relatively poor results. The reason was that the u-bloxreceivers were able to acquire also GPS signals and computed a position solutionbased only on GNSS measurements. After computing the position solution also GPStime was extracted and used to steer the receiver clocks. The High-Sensitivity (HS)of the u-blox receivers thus limited the use of the proposed approach and the re-ceivers were resynchronized due to the presence of genuine GPS signals. Given theavailability of GPS timing, a new approach was proposed where time synchroniza-tion was achieved using the GPS signals collected indoors. Although this approachsolved the problem of resynchronization, the level of synchronization expected forthe pseudolite measurements was not achieved. The reason is likely that the indoor
Table 4.3. Location of the MPL for the second data collection campaignperformed in the meeting room.
Device x [m] y [m]
MPL 2.55 5.38
113

4 – Pseudolite Positioning
the GPS measurements collected by the U-blox receivers are affected by gross errorsdue to multipath and propagation effects. For this reason, only poor navigationsolutions are available and biases of several tens of meters are observed. These bi-ases also affect the quality of the timing signal recovered from GPS. Even if GPSsynchronization was achieved by both receivers, significant errors were still presentin the measurements.In order to try to compensate for these residual errors, a two steps procedure wasadopted.
1. During the first part of the tests, the antennas of the reference and roverreceivers were co-located in a zero-base line configuration. The antennas werekept in this configuration for about 60 seconds: since the two antennas wereco-located PR double differences contain only noise and residual biases due tosynchronization errors.
2. After 60 seconds the user (carrying the rover receiver) started moving. Posi-tioning was then attempted using the corrections computed during the firstpart of the tests. The PR double differences computed using the measurementsfrom the two receivers and plotted in Figure 4.8.
50 100 150 200 250
-20
-15
-10
-5
0
5
10
Time [s]
Pse
ud
ora
ng
e D
ou
ble
Diffe
ren
ce
s [
m]
DD 1-1
DD 2-1
DD 3-1
DD 4-1
Figure 4.8. Double differences of the PR collected from four pseudolites usingtwo u-blox receivers. Meeting room, second data collection campaign, repeata-bility test. During the first 60 seconds, reference and rover receivers were keptin a zero-base line configuration.
114

4.2 – Asynchronous RSSI Positioning
10 20 30 40 50 60 700
1
2
3
4
5
6
7
8
9
10
Time [s]
Po
sitio
n C
oo
rdin
ate
s [
m]
Reference Solution
x
y
Figure 4.9. Position solution obtained using corrected PR measurements whereinitial synchronization biases were removed exploiting the zero-base line configura-tion adopted during the first 60 seconds of the test. When the user start moving,synchronization corrections were no longer valid and the position solution diverged.
From Figure 4.8, the presence of biases clearly emerges in the pseudolite measure-ments preventing the user to obtain a reliable position solution. The biases observedare due to the synchronization problems already discussed above. The biases ob-served were stable during the static phase of the test and thus they were removedexploiting the knowledge of the reference position. A reliable position solution wasobtained using the corrected PR as shown in Figure 4.9. However, when the userstart moving, synchronization corrections were no longer valid and the position so-lution diverged. Thus, this approach does not allow the computation of a reliablesolution during the kinematic phase.The use of synchronous measurements in deep indoor environments is still an openissue and further investigations are required. The results obtained seem to indicatedthat this type of technology is not suitable for deep indoor navigation. For thesetype of scenarios and for the above mentioned reasons an asynchronous approachwas adopted.
4.2 Asynchronous RSSI Positioning
The pseudolite system adopted for the previous data collections can be also usedin an asynchronous way [85]. Different approaches for positioning using pseudolites
115

4 – Pseudolite Positioning
in asynchronous mode are available as mentioned in Section 2.5.3; in this thesis,an approach based on RSS measurements is adopted. In order to overcome thesynchronization problems detailed in Section 4.1, the pseudolite system is used inasynchronous mode using a dedicated software which allows:
� to set the Pseudo Random Noise (PRN) which can be used to select differentcodes from the 1023 Gold code family;
� to set the signal power by adjusting the basic power level (either −115 and−73 dBm) and the attenuation;
� to control the Doppler shift and set some of the navigation message parameterssuch as the Z-count [32, 33];
� to select the pulsing scheme.
RSS measurements, expressed in logarithmic units, are usually modeled as [87, 88,89]:
P (d) = P0 − 10α log10
d
d0(4.5)
where P (d) is the RSS measured at the distance d from the emitter. α is the path-loss exponent and P0 is the power received at a short reference distance, d0.RSS is easy to measure and can be obtained from, for example
� the Automatic Gain Control (AGC) levels [90, 91, 87];
� C/N0 measurements [92].
In this thesis, C/N0 observables are used, hence Eq. (4.5) can be rewritten in termsof C/N0 measurements: (
C
N0
)i
= Ki − α10 log10(di) (4.6)
where the index, i, has been added to denote C/N0 measurements from the ithtransmitter and Ki is a constant accounting for the power of the ith transmittedsignal and the reference distance d0. Unless specified, the C/N0 will always beexpressed in units of dB-Hz.When the constants Ki and α are known, a direct relationship between the measuredC/N0 and transmitter-receiver distance can be established. Transmitter-receiverdistances can be expressed as a function of the user position:
di =√
(xu − xi)2 + (yu − yi)2 (4.7)
116

4.2 – Asynchronous RSSI Positioning
where (xu, yu) and (xi, yi) are the coordinates of the user and the ith pseudolite,respectively. Although Eq. (4.7) considers the case of two dimensional positioning,it can be easily extended to three dimensional case.Using Eq. (4.7), it is possible to rewrite Eq. (4.6) as(
C
N0
)i
= Ki −1
2α10 log10
[(xu − xi)2 + (yu − yi)2
](4.8)
where the user coordinates are the only unknowns. The user position can be deter-mined only when a sufficient number of C/N0 measurements is available (i.e. ≥ 2).In order to determine the user position in the Least Squares (LS) the following costfunction has to be minimized.
C(x, y) =A−1∑i=0
[(C
N0
)i
−Ki +1
2α10 log10
[(x− xi)2 + (y − yi)2
]]2(4.9)
where A is the number of C/N0 measurements available. In this way, the usercoordinates are obtained as
(xu, yu) = arg minx,y
J(x, y) (4.10)
Eq. (4.9) is the Mean Squared Error (MSE) between the measured C/N0 values andthe model in right-hand side of (4.8). The minimization problem in Eq. (4.10) issolved using a gradient descent algorithm where the initial user position can be setequal to the average of the pseudolite coordinates. The gradient of C(x, y) can beeasily evaluated and is given by
∇C(x, y) =
∂C(x,y)∂x
∂C(x,y)∂y
=
∑A−1
i=0 Ei10
ln 102α(x−xi)
(x−xi)2+(y−yi)2∑A−1i=0 Ei
10ln 10
2α(y−yi)(x−xi)2+(y−yi)2
.(4.11)
where Ei is:
Ei =
[(C
N0
)i
−Ki +1
2α10 log10
[(x− xi)2 + (y − yi)2
]](4.12)
Finally, the user position is computed by iterating the following equation[xy
]q+1
=
[xy
]q
− µ · ∇C(x, y)|q (4.13)
117

4 – Pseudolite Positioning
where q is the iteration count and µ is the algorithm step empirically selected toguarantee algorithm convergence.
It has been noted that when the C/N0 values are approaching zero, the mea-surements are affected by significant errors, reflecting the fact that low C/N0 mea-surements are unreliable. In the limit case, measurements with C/N0 values close tozero should be removed. In order to minimize the effect of the measurements withlow C/N0 a new cost function is defined as follow:
Cw(x, y) =A−1∑i=0
(C
N0
)i
E2i (4.14)
where the subscript “w” was added to denote the fact that the cost function is nowa form of Weighted MSE (WMSE) where each term in the summation in (4.14) isweighted by its relative C/N0. The gradient of (4.14) is:
∇Cw(x, y) =
∑A−1
i=0
(CN0
)iEi
10ln 10
2α(x−xi)(x−xi)2+(y−yi)2∑A−1
i=0
(CN0
)iEi
10ln 10
2α(y−yi)(x−xi)2+(y−yi)2
. (4.15)
and the position estimate is now computed iteratively according to the followingupdate equation: [
xy
]q+1
=
[xy
]q
− µ · ∇Cw(x, y)|q (4.16)
where µ has been reduced to account for the scaling introduced by the C/N0 weight-ing.The WMSE algorithm significantly outperformed method (4.13) and for this reasononly results considering (4.16) are presented in Section 5.2.This technique provided very encouraging results which will be presented in the nextsection.
118

Chapter 5
Results - Testing and Analysis
The first part of this chapter is dedicated to the urban tests. First of all a static testis described and the results analyzed, then a pedestrian test is illustrated and theobtained results commented. Then solution obtained using a High-Sensitivity (HS)receiver is then presented. The parameter used to characterize the performance ofthe system are the reliable availability, Root Mean Square (RMS) and maximumerror for both horizontal and vertical components.The second part of the chapter is devoted to the results achieved using the asyn-chronous pseudolite system described in Chapter 4. Data collections involving theuse of several pseudolites were organized and the data collected were used to demon-strate indoor navigation adopting an Received Signal Strength Indicator (RSSI) ap-proach. The performance of the system is tested in an office building: different datacollections were performed to analyze the repeatability of the solution.
5.1 Urban Tests
In signal-degraded environments such as urban canyons or mountainous areas GlobalNavigation Satellite System (GNSS) signals are blocked or strongly degraded bynatural or artificial obstacles. In these scenarios, the multi-constellation approachusing Global Positioning System (GPS) and GLObal NAvigation Satellite System(GLONASS) together, as proposed in Section 3.2.1, is not able to provide accuratePosition Velocity Time (PVT) solution due to the presence of gross errors in themeasurement set. Hence a quality check on the measurements has to be introducedin order to identify and reject erroneous observables.Several data collections were performed, first of all a static campaign was carriedout, as described in Section 5.1.1, in order to validate the Receiver AutonomousIntegrity Monitoring (RAIM) schemes developed. Then kinematic tests were carriedout, using standard and HS GNSS receivers, in order to evaluate the performance
119

5 – Results - Testing and Analysis
of the GPS/GLONASS multi-constellation approach in urban environments.
5.1.1 Static Campaign
In this section the performance of the RAIM algorithms developed, i.e. Forward-Backward, Subset and Danish methods is evaluated in a static test. The performanceis analyzed in terms of:
� reliable availability;
� RMS and maximum horizontal and vertical position errors;
� RMS and maximum horizontal and vertical velocity errors.
A static test of about 6 hours was carried out on 24th February 2012. The antennawas placed on the roof of the PANG (PArthenope Navigation Group) laboratorybuilding, at Centro Direzionale of Naples (Italy), a typical example of urban canyon.The antenna position and the environment is shown in Figure 5.1. In such environ-ment many GNSS signals are blocked by skyscrapers or are strongly degraded bythe multipath phenomenon. The only test performed in this section was static tosimplify the error analysis for the position (the antenna is placed in a well-knownlocation) and for the velocity (the antenna is fixed, so its velocity was zero). A kine-matic test needs a reference for the error analysis and thus it is more complicated toobtain. Kinematic tests are analyzed in Section 5.1.2.The static test choice does notlimit the validity of the analysis because the operational environment is a typicalsignal-degraded scenario, i.e. an urban canyon. The equipment used for this test iscomposed by:
� a NovAtel FlexPak-G2, able to provide single frequency (L1) GPS/GLONASSmeasurements;
� a NovAtel 702-GG antenna.
The reference solution is computed by a post-processing geodetic method and theaccuracy of the position is of mm order; the coordinates of the antenna are providedin Table 5.1. Eight different configurations are analyzed, combining the two GNSSconsidered and the different RAIM schemes developed:
Table 5.1. Coordinates of the antenna placed on the roof of the PANG laboratory
Latitude [deg] Longitude [deg] Altitude [m]
40.8565323 14.2844166 90.6257
120

5.1 – Urban Tests
Figure 5.1. Antenna placed on the roof of the PANG (PArthenope NavigationGroup) laboratory building, at Centro Direzionale of Naples (Italy)
� GPS only without RAIM application (briefly indicated as GPS noRAIM);
� GPS/GLONASS without RAIM application (GG noRAIM);
� GPS only with Subset RAIM application (GPS Sub);
� GPS/GLONASS with Subset RAIM application (GG Sub);
� GPS only with Forward-Backward RAIM application (GPS FB);
� GPS/GLONASS with Forward-Backward RAIM application (GG FB);
� GPS only with Danish method applied (GPS Dan);
� GPS/GLONASS with Danish method applied (GG Dan).
The performance of the considered configuration is analyzed in terms of accuracyand availability. Specifically the metrics adopted for the evaluation of the accu-racy are: RMS and maximum errors for horizontal and vertical components in theposition and velocity domains. In order to evaluate the performance in term of
121

5 – Results - Testing and Analysis
availability two different parameters are adopted depending on the application ornot of RAIM techniques. The solution availability is used for the configurationwithout quality check and, in case of RAIM application, the reliable availability,defined as the time percentage when solution is reliable, is introduced. The meannumber satellites available is 6 in the case of GPS only; in the multi-constellationcase this value is 9.5. GPS only configuration is characterized by a mean Horizon-tal DOP (HDOP) of 5 and its maximum value reach 1600 due to the presence ofobstacles which block the satellite signals as shown in Figure 5.1. The introductionof GLONASS measurements improve the satellites geometry and the HDOP meanvalue is 2.45, i.e., more than halved with respect to GPS only; the maximum valueis 22. The tests session is characterized by a high solution availability, the inclusionof GLONASS observables provides only a slight improvements in terms of solutionavailability, which is improved of 2% with respect to the GPS only configuration.Availability values are detailed in the second column of Table 5.2.The test is also characterized by very large errors more than 1 km without RAIM ap-plication: this is due to geometry and multipath errors; in order to reduce such errorsthree different RAIM algorithms are applied. The developed RAIM schemes reducethe availability of the position solution. In the GPS only configuration the Subsettest guarantees the highest reliable availability (76.2%); for Danish and Forward-Backward schemes the reliable availability is halved with respect to the solutionavailability. For the multi-constellation GPS/GLONASS, the Subset test guaran-tees a high reliable availability (only 3.5% of the solutions are rejected by the qual-ity control) which is increased of 20% with respect to the GPS only configuration.The effect of the GLONASS inclusion is more evident in the Danish and Forward-Backward schemes; in these cases the reliable availability reaches about 75% withan improvement of 25% − 30% with respect to the GPS only configurations. Thereliable availability of the position are summarized in the last column of Table 5.2.Similar results are obtained in the velocity domain, GLONASS measurements in-
Table 5.2. Solution Availability and Reliable Availability of the position.
Configuration Solution Availability [%] Reliable Availability [%]
GPS noRAIM 98.1 N.A.GG noRAIM 100 N.A.
GPS Sub 98.1 76.2GG Sub 100 96.5GPS FB 98.1 43.6GG FB 100 74.0
GPS Dan 98.1 49.0GG Dan 100 75.8
122

5.1 – Urban Tests
Table 5.3. Solution Availability and Reliable Avaliability of the velocity solution.
Configuration Solution Availability [%] Reliable Availability [%]
GPS noRAIM 98.1 N.A.GG noRAIM 100 N.A.
GPS Sub 98.1 70.5GG Sub 100 97.8GPS FB 98.1 56.3GG FB 100 72.9
GPS Dan 98.1 56.3GG Dan 100 73.4
crease the reliable availability for the three RAIM schemes with respect to GPS onlyconfigurations. As in the position domain, the Subset scheme guarantees the highestreliable availability (70.5% for GPS only and 97.8% for the multi-constellation case)with respect to the other schemes developed. The solution availability and the reli-able availability of the velocity solution are summarized in Table 5.3. In the positionand velocity domain, horizontal and vertical solutions are analyzed separately.At first, the performance of the developed RAIM algorithms is compared to thebase-line configuration, using the classical representation for the horizontal compo-nent, i.e. East and North coordinates expressed in meters in order to have a clearamplitude of the clouds of the different configurations. In Figure 5.2, Figure 5.3and Figure 5.4 the base-line configurations, i.e. without quality control, are repre-sented by magenta dots (GPS only) and by blue dots (GPS/GLONASS case), theconfigurations with the RAIM algorithms are represented by green and yellow dots,respectively.The spread of the clouds provides an immediate representation of the magnitude ofthe error and allows a simple performance comparison between the configurationsconsidered. In Figure 5.2 the horizontal scatter of the base-line configuration iscompared with that of the Danish method.From Figure 5.2, Figure 5.3 and Figure 5.4 it clearly emerges that the configura-
tions without RAIM are characterized by large errors: in the GPS only case, themaximum horizontal error exceeds 1 km and the inclusion of GLONASS measure-ments reduces it of almost 4 times.The Danish method improves all considered configurations, reducing both maximumand RMS errors, as shown in Figure 5.2 for the horizontal component; the cloudsrelative to the configurations using RAIM are significantly reduced with respect tothe base-line configurations. The maximum error obtained with the Danish methodis 159.7 meter. The error values linked to the Danish method are summarized inthe third and fourth rows of Table 5.4.
123

5 – Results - Testing and Analysis
Figure 5.2. Horizontal scatter of the base-line configuration compared withthat of the Danish method.
In Figure 5.3, horizontal performance of the configuration using the Subset algorithmare compared with the base-line configuration. Also in this case, the GLONASS in-clusion provides improvements with respect to the GPS case: the configurationthat provides the best performance for all the parameters considered is the multi-constellation GPS/GLONASS using the Subset algorithm, i.e. the yellow cloud ismore concentrated with respect to the other as shown in Figure 5.3. Using thisconfiguration the RMS error is drastically reduced passing from 34.2 m to 15.1 m,without a significant availability reduction (only 2% of the solution are declaredunreliable). Statistical values of the horizontal and vertical position error are sum-marized in Table 5.4. In Figure 5.4, the Forward-Backward performance in thehorizontal plane is compared with the base-line configurations. The use of qualitychecks and the inclusion of the GLONASS observables clearly improve the perfor-mance with respect to the base-line case; also in this case the yellow cloud is thesmallest, confirming the results obtained in the previous cases. The RMS error inthis case is more than halved with respect to the configuration without RAIM. Thisfact clearly emerges comparing the fifth and sixth rows of Table 5.4 with respect tothe first and the second ones of the same table. In order to have an immediate com-parison, the horizontal solutions provided by the configuration using the differentRAIM schemes are plotted in Figure 5.5. From Figure 5.5, the Danish method and
124

5.1 – Urban Tests
Figure 5.3. Horizontal scatter of the base-line configuration compared withthat of the Subset test
Figure 5.4. Horizontal scatter of the base-line configuration compared with thatof the Forward-Backward scheme.
125

5 – Results - Testing and Analysis
Figure 5.5. Horizontal solutions provided by the configuration using thedifferent RAIM schemes.
the Forward-Backward scheme seem to provide similar performance and the rela-tive clouds are smaller than the Subset one. From a qualitative analysis the cloudrelative to the GPS/GLONASS solution with Forward-Backward (magenta dots)scheme is more concentrated with respect to the others. A more detailed analysiscan be performed comparing the values summarized in Table 5.4.
In order to highlight the different behaviors of the three RAIM algorithms, a
Table 5.4. Statistical position error parameters: RMS and maximum errors forboth horizontal and vertical components.
Configuration RMS[m] Max [m]
Horizontal Vertical Horizontal VerticalGPS Only 54.9 85.6 1264.5 1685.9
GPS/GLONASS 34.8 65.4 245.6 372.2
GPS Dan 23.2 56.1 159.7 343.1GG DAN 16.0 38.1 159.7 284.3GPS FB 17.9 44.5 159.7 285.8GG FB 13.4 31.3 159.7 284.3
GPS Sub 27.5 56.4 299.0 327.0GG Sub 15.1 36.1 321.6 398.5
126

5.1 – Urban Tests
469987 4700470
2
4
6
8
10
12
14
16
18Horizontal Position Error
Hor
izon
tal P
ositi
on E
rror
[m]
GPS/GLONASS FBGPS/GLONASS DanishGPS/GLONASS Subset
Figure 5.6. Detailed view of the horizontal error pertaining to the threebest configurations
detailed view of the horizontal error pertaining the three best configurations is pro-vided in Figure 5.6. In Figure 5.6, the rectangular area (on the left) within thedotted line shows the case where the Subset scheme provides the best solution. Therectangular area (on the right) within the dotted line shows the case where the Dan-ish method provides the wrost performance with respect to the other methods dueto an erroneous rejection. This effect is avoided in the Forward-Backward case dueto the Backward phase of such algorithm.In order to have a comparison of the performance in the vertical channel, the ver-
tical error of the considered configurations is plotted as a function of the local timein Figure 5.7, Figure 5.8 and Figure 5.9.From Figure 5.7, Figure 5.8 and Figure 5.9, it clearly emerges that the configura-tions without RAIM are characterized by larger errors: in the case of GPS only, themaximum vertical error exceeds 1.5 km and the inclusion of GLONASS measure-ments reduce it by almost a factor 4 as for the horizontal case.The use of quality control algorithms improves significantly the performance in termsof both RMS and maximum position errors and such enhancements are clear for bothGPS only and GPS/GLONASS cases. As expected the vertical error has values usu-ally bigger than the horizontal ones due to the satellite geometry. Statistics of thevertical error for the different methods are detailed in the second and fourth columnof Table 5.4.
127

5 – Results - Testing and Analysis
Figure 5.7. Danish and base-line vertical errors as a function of the local time.
Figure 5.8. Subset and base-line vertical errors as a function of the local time.
128

5.1 – Urban Tests
Figure 5.9. Forward-Backward and base-line vertical errors as a functionof the local time.
A comparison among the RAIM algorithms in the vertical channel is carriedout in Figure 5.10. From Figure 5.10, it emerges that vertical position errors forGPS/GLONASS Subset configurations are degraded (i.e. the maximum value inthe case of GPS only is 327 m and in the multi-constellation case it reaches 398m). This behavior is due to an erroneous measurement rejection in the presenceof multiple blunders; better results are obtained with the Forward-Backward andDanish methods. Statistical parameters of the vertical error are summerized inTable 5.4. As for the position errors, the RAIM schemes are first compared withthe no RAIM configurations. In Figure 5.11, the perfomance of the Danish methodis evaluated; Subset scheme is analyzed in Figure 5.12 and finally the accuracy ofthe Forward-Backward algorithm is investigated in Figure 5.13.Then the performance of the three Fault Detection and Exclusion (FDE) techniquesare compared in the horizontal and vertical channels in Figure 5.14.In the upper boxes of Figure 5.11, Figure 5.12 and Figure 5.13, the horizontal velocityerrors of the base-line configuration are compared to tose of the configurations usingthe three different RAIM schemes. From these pictures, it can be noted that noneof the RAIM configurations is characterized by high errors: for the GPS only casethey are higher than 50 m/s; the GLONASS inclusion reduces the errors down to0.44 m/s. Figures of merits of the horizontal and vertical velocity errors for the baseline configurations are summarized in the first two rows of Table 5.5.
129

5 – Results - Testing and Analysis
Figure 5.10. Vertical error pertaining to the six configurations using thethree different RAIM schemes
As in the position domain, RAIM methods improve all the configurations con-sidered, reducing both maximum and RMS errors for the horizontal and verticalcomponents; however in the velocity domain the benefits of RAIM are less evidentwith respect to the position domain due to the robustness of the Doppler observ-able.In the upper box of Figure 5.14, the horizontal velocity errors obtained with theFDE techniques are compared; in the lower box of Figure 5.14 the vertical velocityerror of the three schemes are plotted with respect to the local time. As in theposition domain, the Subset test is characterized by the highest reliable availabilitybut also by the highest errors, the other schemes provide similar performance forboth horizontal and vertical components.
The number of exclusions performed by the three RAIM schemes is plotted as afunction of time in order to demonstrate the ability to identify and reject multipleblunders.In Figure 5.15, the number of PRs excluded by the three methods is plotted sep-arately as function of time; from Figure 5.15, emerges that the Forward-Backwardmethod was able to reject up to six simultaneous measurements in the multi-constellation GPS/GLONASS configuration (red dots), while the maximum numberof simultaneous exclusions for the other methods is 5. In the case of GPS only, the
130

5.1 – Urban Tests
Figure 5.11. Danish method horizontal and vertical velocity error as afunction of local time
Table 5.5. Statistical position error parameters: RMS and maximum errors forboth horizontal and vertical components.
Configuration RMS[m/s] Max [m/s]
Horizontal Vertical Horizontal VerticalGPS Only 0.968 1.573 68.750 108.240
GPS/GLONASS 0.042 0.060 0.442 0.822
GPS Dan 0.046 0.073 0.649 1.251GG DAN 0.035 0.054 0.295 0.642GPS FB 0.047 0.074 0.649 1.251GG FB 0.036 0.055 0.367 0.653
GPS Sub 0.053 0.084 0.669 1.251GG Sub 0.042 0.067 0.928 1.337
methods were able to perform 4 simultaneous PR exclusions. In Figure 5.16, thenumber of PR-rate measuremetns excluded by the three methods is plotted sepa-rately as a function of time; from Figure 5.16, it clearly emerges that the number ofPR rate exclusions is lower than in the PR case: in this case the maximum numberof measurements rejected is 5 in the case of GPS/GLONASS multi-constellation
131

5 – Results - Testing and Analysis
Figure 5.12. Subset test horizontal and vertical velocity error as afunction of local time
approach using the Danish method. This confirms the robustness of the Dopplermeasurements to the multipath effect. From the analysis performed, it emerges thatthe Forward-Backward method provides the best performance with respect to theother techniques. It guarantees a good compromise between accuracy and availabil-ity. Such method provides a more accurate solution with respect to the Subset testand with respect to the Danish method. It has the advantage of the Backward phasethat limited erroneous exclusions. For these reasons, only the Forward-Backwardscheme is used in the next sections.
132

5.1 – Urban Tests
Figure 5.13. Forward-Backward horizontal and vertical velocity error asa function of local time
Figure 5.14. Horizontal and vertical velocity errors for the trhee RAIM schemes
133

5 – Results - Testing and Analysis
Figure 5.15. Number of the PRs excluded by the three RAIM algorithmsplotted as a function time.
Figure 5.16. Number of the PR rate measurements excluded by the threeRAIM algorithms considered.
134

5.1 – Urban Tests
5.1.2 Kinematic Test
The data collection considered in this section was a pedestrian test and is illustratedin Figure 5.17. It was carried out on 21st June 2012 around 10:00 am in CentroDirezionale of Naples (Italy), that is, as already mentioned, a typical example ofurban canyon. The trajectory followed was the same described in Section 3.2 andthe reference path was obtained using the method already described in Section 3.2using pre-surveyed vertexes. The NovAtel receiver was equipped with an externaldevice (a button) used to mark the transit on the vertexes in order to associate atime epoch to each surveyed vertex. Data were collected with a 1 Hz frequency, thetotal duration of the test was about 30 minutes, the speed varied from 0 to about 5km/h without stops and the total distance travelled was about 2.5 km.The kinematic tests were performed with two different receivers:
� a NovAtel OEM615, which is a multi-constellation GPS/GLONASS dual-frequency receiver: L1 and L2 for GPS and GLONASS;
� a u-blox LEA 6-T device which is a single frequency GPS only HS receiver.
The two devices were connected to the same antenna (a NovAtel 702-GG antenna).The performance is evaluated in terms of:
� Position reliable availability (availability for configurations without RAIM);
� Position accuracy, i.e. RMS and maximum error for both horizontal and ver-tical components.
Figure 5.17. Pedestrian test carried out on 21st June 2012 around 10:00 am inCentro Direzionale of Naples (Italy), a typical example of urban canyon.
135

5 – Results - Testing and Analysis
In this section, the results obtained using the standard NovAtel receiver are detailed;the results obtained using the HS receiver are summarized in Section 5.1.3.Eight different configurations are analyzed:
� GPS only without RAIM application (indicated as GPS noRAIM);
� GPS/GLONASS without RAIM application (GG noRAIM);
� GPS only with Forward-Backward RAIM application (GPS RAIM);
� GPS/GLONASS with Forward-Backward RAIM application (GG RAIM);
� GPS only with altitude aiding without RAIM (GPS Aid H);
� GPS/GLONASS with altitude and inter-system bias aiding without RAIM(GG Double Aid);
� GPS only with altitude aiding with RAIM (GPS RAIM Aid H);
� GPS/GLONASS with altitude and inter-system bias aiding without RAIM(GG RAIM Double Aid).
The data collected using the NovAtel receiver are characterized by a solution avail-ability that varies from 53% for GPS standalone to 74% for GPS/GLONASS; theuse of aiding improves GPS availability up to the level of GPS/GLONASS, whichreaches 84% with aiding information inclusion. The data pertaining the solutionavailability and reliable availability are summarized in Table 5.6.For the first three configurations, the reliable availability is more than halved with
respect to the solution availability, while aiding inclusion allows GPS/GLONASSmulti-constellation solution to obtain a high reliable availability. Specifically, the
Table 5.6. Solution Availability and Reliable Availability of the positionusing Novatel OEM625 receiver
Configuration Solution Availability [%] Reliable Availability [%]
GPS noRAIM 53 N.A.GG noRAIM 73 N.A.
GPS Aid H 74 N.A.GG Double Aid 84 N.A.
GPS RAIM 53 19GG RAIM 73 38
GPS RAIM Aid H 74 31GG RAIM Double Aid 84 62
136

5.1 – Urban Tests
use of quality checks reduces the availability of the solution which can be very low inthe case of GPS only (reliable availability around 19%). The inclusion of GLONASSmeasurements or of aiding on the altitude improves the reliable availability whichis doubled with respect to the base-line configuration; the configuration using GPSalong with GLONASS and double aiding further improves the reliable availabil-ity which reaches a maximum value of 62%. Although, in the scenario selected,many GNSS signals are blocked or degraded by multipath, positioning results inthe GPS only case are characterized by reasonable RMS values. On the contrarylarge maximum errors can be present as shown in Figure 5.19. The GLONASS andpseudo-measurement inclusion (without RAIM application) increases the availabil-ity but degrades the solution with respect to various parameters, most of all for thelack of blunder check.In Figure 5.19, both horizontal (in the upper box) and vertical (in the lower box)position errors are plotted as a function of time. In Figure 5.19, the performanceof the configurations without RAIM is analyzed. All the available solutions areconsidered; it clearly emerges that in this scenario all the configurations are char-acterized by very high errors. The maximum error is 500 m in the horizontal planefor the GPS configuration with aiding on the altitude. This value is due to the useof aiding on the altitude, which is adapted to improve the redundancy of the sys-tem and reduce the vertical error. Geometrically the altitude pseudo-measurementcan be interpreted as a satellite at the zenith as shown in Figure 5.18. Hence themain information provided by the pseudo-measurement is related to the altitude.In same cases, however, when the geometry of the system is very weak, the pseudo-measurement contributes to the estimate of the horizontal component, providingerroneous information and so degrading the solution. From the upper box of Figure5.19, it emerges that the GPS only configuration (red dots) provides the best per-formance in the horizontal plane, however with the lowest solution availability. Theinclusion of GLONASS measurements mainly improve the availability of the solutionbut all the considered error parameters are higher than in the GPS case. Finally,the use of the multi-constellation and of the two aidings (i.e. GPS/GLONASS withdouble aiding, blue dots) provides performance similar to that of the GPS case butwith a very high solution availability, demonstrating the potentiality of the multi-constellation approach.From the lower box of Figure 5.19, it can be noted that the configuration with aiding(blue and magenta dots) in urban canyons improves the performance of the verticalcomponent for both RMS and maximum values which are strongly reduced withrespect to the base-line configuration.Statistical parameters of the horizontal and vertical errors for the configurationswithout RAIM application are summarized in Table 5.7. In order to have a di-rect comparison between the base-line configuration and to analyze the benefitsof the RAIM algorithm in urban navigation, horizontal and vertical errors of the
137

5 – Results - Testing and Analysis
7
10
8
Aid
GDOP=65.0098; PDOP=49.3303; HDOP=25.9535; EDOP=19.489; NDOP=17.1395; VDOP=41.9511; TDOP=42.3414
Figure 5.18. Sky plot pertaining an epoch where only three GPS satellites wereavailable and the solution was obtained exploiting aiding information. Geometri-cally, the pseudo-measurement can be interpreted as a satellite at the zenith.
Table 5.7. Statistic parameters of the errors for the base-line configurationswithout RAIM application.
Configuration RMS[m] Max [m]
Horizontal Vertical Horizontal VerticalGPS noRAIM 6.9 6.2 122.6 112.0GG noRAIM 18.9 13.8 482.8 284.1GPS Aid H 25.2 3.7 500.0 7.9
GG Double Aid 8.2 3.7 134.4 8.3
base-line configuration with (magenta and blue dashed lines) and without RAIM(green and red lines) are plotted as a function of time in Figure 5.20. In order tohave a fair comparison, configurations are considered at common epochs, i.e. onlywhen the configuration with RAIM is declared reliable. From Figure 5.20, the ben-efits of the RAIM application clearly emerges: the dashed lines representing theconfiguration with RAIM are ever lower than the continuous lines representing theconfigurations without quality checks. The RAIM application improves significantly
138

5.1 – Urban Tests
Figure 5.19. Horizontal and vertical positition error of the configurations consid-ered without RAIM application.
the system performance in terms of RMS and maximum errors for both horizontaland vertical components. The best performance is obtained combining GPS andGLONASS measurements. The RMS of the horizontal error is limited to 3.7 m.The best performance in the vertical channel is obtained in the GPS only case withRAIM. In this case, RMS and maximum values are reduced even with respect tothe GPS/GLONASS multi-constellation case. This is only due to the limited reli-ability of the solution in the case of GPS only. In fact the maximum error in thevertical components in the multi-constellation case corresponds to an epoch whereGPS solution is not available, but the performance in terms of RMS are very close:the difference is of only 0.5 m confirming the potentiality of the multi-constellation. The behavior of the horizontal error is shown in the upper box of Figure 5.20.Vertical errors are shown in the lower box of the same figure.Statistical parameters of the horizontal and vertical errors for the base-line configu-rations, considering only reliable epochs, are summarized in Table 5.8. A comparisonamong the configurations with RAIM is performed to demonstrate the benefits ofthe inclusion of aiding in urban navigation and to evaluate their impact on RAIMalgorithms. The analysis is also useful to demonstrate the needs of quality checkingfor avoiding the use of erroneous values for aiding. The performance of each con-figuration is evaluated in the reliable epochs. The behavior of the horizontal andvertical errors are analyzed separately in Figure 5.21. From Figure 5.21, the benefits
139

5 – Results - Testing and Analysis
379100 379400 379700 380000 380300 3806000
10
20
30
40
50Horizontal Error
11:18 11:23 11:28 11:33 11:38 11:43
Err
or [m
]
GPS Only No RAIMGPS Only RAIMGPS\GLONASS No RAIMGPS\GLONASS RAIM
379100 379400 379700 380000 380300 3806000
10
20
30
40
50
Err
or [m
]
Vertical Error
11:18 11:23 11:28 11:33 11:38 11:43Local Time
Figure 5.20. Horizontal and vertical errors for base-line configurationswith and without RAIM, considering only reliable epochs and using theNovAtel OEM615 receiver
of the inclusion of aiding clearly emerges; in fact the configurations with aiding, i.e.GPS with altitude aiding (magenta dashed line) and GPS/GLONASS with doubleaiding (blue dashed line), are characterized by smaller errors with respect to thebase-line configurations, (green continuous line) for GPS only and (red continuousline) for GPS/GLONASS multi-constellation . The use of altitude aiding reducessignificantly the vertical error: the RMS value is of metric order for both configu-rations. The use of aiding improves also the performance in the horizontal channel,this is due to the enhanced redundancy of the system which improves the perfor-mance of the RAIM algorithm. Statistical parameters of horizontal and vertical
Table 5.8. GNSS performance in the kinematic test with RAIM, using NovatelOEM615 receiver and considering only reliable epochs
Configuration RMS[m] Max [m]
Horizontal Vertical Horizontal VerticalGPS noRAIM 5.1 4.2 43.9 50.1GPS RAIM 4.1 2.7 17.5 14.7
GG noRAIM 4.2 3.9 44.0 49.9GG RAIM 3.7 3.2 16.7 30.7
140

5.1 – Urban Tests
379100 379400 379700 380000 380300 3806000
10
20
30
40
50Horizontal Error
11:18 11:23 11:28 11:33 11:38 11:43
Err
or [m
]
GPS Only RAIMGPS Only Aid H RAIMGPS\GLONASS RAIMGPS\GLONASS Aiad H and CDT RAIM
379100 379400 379700 380000 380300 3806000
5
10
15
20
Err
or [m
]
Vertical Error
11:18 11:23 11:28 11:33 11:38 11:43Local Time
Figure 5.21. Horizontal and vertical errors for the configurations withRAIM each configuration is analyzed in the relative reliable epochs andusing Novatel OEM615 receiver.
Table 5.9. Statistical parameters of horizontal and vertical errors for theconfigurations with RAIM using NovAtel OEM615 receiver and consideringonly reliable epochs.
Configuration RMS[m] Max [m]
Horizontal Vertical Horizontal VerticalGPS RAIM 4.1 2.7 17.5 14.7
GPS RAIM Aid H 4.1 0.6 15.2 1.3GG RAIM 4.2 3.9 44.0 49.9
GG RAIM Double Aid 3.3 0.7 17.6 1.5
errors for the configurations using RAIM, considering reliable epochs, are summa-rized in Table 5.9. The RAIM application improves significantly the performance ofaided configurations, in terms of RMS and maximum errors. The best performanceis obtained combining GPS and GLONASS measurements with aid implementation,limiting the vertical error to a meter level, while the horizontal one is characterizedby a 3.3 m RMS error and a 17.6 m maximum error, with a reliable availability of62%.
141

5 – Results - Testing and Analysis
5.1.3 High Sensitivity solution
In this section, the results obtained using the HS GPS receiver are analyzed. Theperformance is evaluated in terms of solution availability (without RAIM applica-tion) or reliable availability (when quality checking is performed); the accuracy isanalyzed in terms of RMS and maximum error for both horizontal and vertical com-ponents.The data collected using the u-blox receiver are characterized, as expected, by a highsolution availability (about 98% for GPS and 100% for GPS with altitude aiding)confirming the ability of this type of receiver to acquire and track very weak signals.Values of the solution availability and reliable availability for the configurations con-sidered are summarized in Table 5.10.In the test scenario, due to low Signal-to-Noise Ratio (SNR) values and multipath
effects, the navigation accuracy is degraded and the increased measurement noiseprevents HS receivers from achieving the level of accuracy performance demonstratedin the previous section using a standard receiver.The solution provided by the u-blox receiver is characterized by very large errors,in the order of several hundreds of meters; horizontal and vertical errors are plottedas a function of time in Figure 5.22. From the upper box of Figure 5.22, it emergesthat the two configurations GPS (red line) and GPS with altitude aiding providesimilar performance: the two lines are very close to each other. In the base-lineconfiguration case, i.e. GPS only without RAIM application, the horizontal errorreaches a maximum value of 176.8 m. Also the configuration with aiding on thealtitude provides similar performance and only 7 m of difference can be observed;a sub-metric difference emerges for the RMS value. From the lower box of Figure5.22, the benefits of aiding clearly emerges: the maximum vertical error is stronglyreduced passing from 788 m to 111.8 m. However, as highlighted in the previoussection, when a blunder is presents, it produces a degradation of the performance ofthe aided configurations. In this case, this phenomenon is less evident because theaccuracy of the unaided solution is very poor.These results are summarized in Table 5.11.In order to evaluate the benefits of the use of RAIM in urban scenarios and with a
Table 5.10. Solution Availability and Reliable Availability of the positionusing the u-blox receiver
Configuration Solution Availability [%] Reliable Availability [%]
GPS noRAIM 98 N.A.GPS Aid H 100 N.A.GPS RAIM 98 70
GPS RAIM Aid H 100 82
142

5.1 – Urban Tests
Table 5.11. Statistical parameters of the horizontal and vertical errors for theconfigurations without RAIM using the u-blox receiver.
Configuration RMS[m] Max [m]
Horizontal Vertical Horizontal VerticalGPS RAIM 51.0 64.1 176.8 788.0
GPS RAIM Aid H 51.3 58.4 183.8 111.8
HS receiver, the horizontal and vertical errors of the two configurations consideredare plotted separately in Figure 5.23.From the upper box of Figure 5.23, it can be noted that aiding on the altitude slightlydegrades the horizontal solution. In fact the blue line is higher than the red one.The two configurations are however very close and the differences in term of RMSerror is only two meters. The degradation is more evident in the maximum error,which passes from 154 m to 283 m. RAIM improves significantly the performancein terms of RMS error for the vertical and horizontal components, maintaining ahigh reliable availability. RMS horizontal errors are halved and even better resultsare observed in the vertical component. The maximum horizontal error of the GPSaided configuration is degraded due to an erroneous measurement rejection in thepresence of multiple blunders. From the lower box of Figure 5.23, the benefits of
379300 379600 379900 380200 3805000
50
100
150
200Horizontal Error
11:22 11:27 11:32 11:37 11:42
Err
or [m
]
379300 379600 379900 380200 3805000
50
100
150
200
250
Err
or [m
]
Vertical Error
11:22 11:27 11:32 11:37 11:42
Local Time
GPS (no RAIM)GPS aid (no RAIM) Error up to 788 m
Figure 5.22. Horizontal (upper box) and vertical (lower box) errors as a functinof time using u-blox receiver without RAIM application.
143

5 – Results - Testing and Analysis
Table 5.12. Statistical parameters of horizontal and vertical errors for the config-urations with RAIM using u-blox receiver, considering only reliable solutions
Configuration RMS[m] Max [m]
Horizontal Vertical Horizontal VerticalGPS RAIM 23.2 19.2 153.9 125.7
GPS RAIM Aid H 25.3 1.3 282.7 4.8
aiding and of the application of RAIM clearly emerges: the blue line is always lowerthan the red one. The maximum vertical error is reduced passing from 126 m to 5m, and the RMS value is reduced by 15 times passing from 19.2 m to 1.3 m.The statistical parameters of the horizontal and vertical errors considering only re-liable solutions are summarized in Table 5.12. In order to highlight the benefits ofRAIM in the case of aiding, a comparison between the aided configurations is per-formed. The behavior of the horizontal and vertical error is shown in Figure 5.24.From the lower box clearly emerges that the use of RAIM provides a significantimprovement in the vertical error. When a blunder is present in the measurementset, an erroneous value is assigned to the aiding degrading the parameter that isdirectly observed by the pseudo-measure. For a quantitative analysis, statisticalparameters of the position error for the aided configurations, considering only the
379300 379600 379900 380200 3805000
50
100
150
200
Err
or [m
]
Horizontal Error
11:22 11:27 11:32 11:37 11:42
379300 379600 379900 380200 3805000
50
100
150Vertical Error
11:22 11:27 11:32 11:37 11:42Local Time
Err
or [m
]
GPS (RAIM)GPS aid (RAIM)
Figure 5.23. Horizontal (upper box) and vertical (lower box) errors as a functionof time using the u-blox receiver with RAIM application.
144

5.1 – Urban Tests
379300 379600 379900 380200 3805000
100
200
300
Err
or [m
]
Horizontal Error
11:22 11:27 11:32 11:37 11:42
379300 379600 379900 380200 3805000
20
40
60
80
100
120Vertical Error
11:4211:3711:3211:2711:22Local Time
Err
or [m
]
GPS aid (no RAIM)GPS aid (RAIM)
Figure 5.24. Horizontal (upper box) and vertical (lower box) errors as afunction of time using the u-blox receiver. Performance conparison betweenconfiguration with and without RAIM shows the advantages of the use ofthe quality checks and of aiding.
Table 5.13. Statistical parameters of horizontal and vertical errors for the aidedconfigurations using u-blox receiver, considering only reliable solutions
Configuration RMS[m] Max [m]
Horizontal Vertical Horizontal VerticalGPS Aid H 48.5 58.2 150.4 111.8
GPS RAIM Aid H 25.3 1.3 282.7 4.8
reliable epochs, are summarized in Table 5.13
5.1.4 Main results for the urban scenarios
From the results presented above, it is possible to conclude that GPS/GLONASSmulti-constellation shows evident improvements with respect to stand-alone GPSin terms of solution availability, accuracy and integrity. The use of aiding with-out quality control imporves mainly the solution availability and, in some cases,degrades the solutions accuracy. In urban application, RAIM algorithms are neces-sary to identify and reject several gross errors; moreover the Forward-Backward andthe Danish methods are characterized by similar performance and by the smallest
145

5 – Results - Testing and Analysis
errors, demonstrating the usefulness of the separability check module (which cannotbe applied to Subset method). Subset method in characterized by highest value ofreliable availability but also by the largest errors. The use of aiding on the altitudealong with RAIM, improves the performance of the navigation solution for all pa-rameters considered. Finally the comparison between a standard receiver and a HSdevice shows that the first receiver guarantees more accurate positioning but witha lower reliable availability. The usage of a HS receiver is justified only when theRAIM quality check is carried out.
5.2 Indoor Tests
Indoor navigation using radio navigation systems is a challenging task which involvesthe solution of several problems such as signal attenuation, fading and measurementsbiases due to multipath propagation.Although the range of operations of GNSS significantly extended by the develop-ment of new techniques such as HS, indoor location using GNSS alone is still verychallenging. In order to demonstrate indoor location, the use of a HS GNSS re-ceiver, which is able to track very weak signals, was considerd. The results obtainedusing a HS GNSS receiver are discussed in Section 5.2.1. Then the opportunity ofusing pseudolites for indoor navigation is investigated; results obtained in differentindoor scenarios are analyzed. The goals and the results of the tests performed usingpseudolites are detailed in Section 5.2.2 and in Section 5.2.5, respectively.
5.2.1 Indoor High Sensitivity solution
The first solution tested for indoor navigation was the use of a HS GNSS receiver ableto track very weak signals. So a data collection has been carried out in the corridor onthe first floor of a large office building on the Joint Research Centre (JRC) premises(Ispra, Italy) on July 2013. Several control points were placed in the corridor toverify the accuracy of the navigation solution. The equipment used for this test iscomposed by:
� a u-blox LEA-6T single frequency HS GPS receiver;
� a GPS patch antenna;
� a laptop for the storage of the measurements.
The equipment adopted is shown in Figure 5.25. The user equipped with the abovementioned devices, followed a straight-line trajectory in the corridor of the aforesaidbuilding. The building was carefully surveyed in order to determine the coordinatesof the control points used for performance evaluation. Ten control points were placed
146

5.2 – Indoor Tests
Rx Antenna
USB Connections: - U-blox LEA-6T
- Realtek RTL2832U
Control Points
Figure 5.25. Equipment used for indoor positioning: a u-blox LEA-6T singlefrequency HS GPS receiver and a GPS antenna. The test was carried out inthe corridor of the first floor of a large office building in the JRC premises(Ispra, Italy) on July 2013. Several control points were placed in the corridorfor performance evaluation.
in the corridor and their coordinates are provided in Table 5.14.PRs provided by the u-blox receiver were used as input to the navigation algorithms
described in Section 2.2.5. In Figure 5.2.1, the navigation solution obtained using u-blox measurements (yellow markers) are plotted along with the control points (bluemarkers).From Figure 5.2.1, it clearly emerges that the GNSS solution is characterized by avery poor accuracy, the fixes are spread over the JRC campus and only occasionallythe solutions are within the building. This demonstrates that GNSS alone may becompletely unable to provide positioning information in these scenarios.
147

5 – Results - Testing and Analysis
Table 5.14. Coordinates of control points placed on the corridor of the first floorof the building selected for the data collection.
Control Point Latitude[deg] Longitude [deg]
1 45.80957863 8.6299060142 45.80961859 8.6299042133 45.80965153 8.6299024114 45.80968534 8.6299007385 45.80971853 8.6298986966 45.80975222 8.6298963987 45.80978156 8.6298953658 45.80980333 8.6298939729 45.80983036 8.62989253910 45.80984677 8.629891778
Figure 5.26. Indoor GNSS navigation solution. Position fixes obtained using themeasurements from a HS GNSS receiver. Although the measurements were takenindoors, position fixes are only occasionally inside the building seleceted.
148

5.2 – Indoor Tests
5.2.2 Indoor navigation asynchronous pseudolite solution,control point test
Considering the limitations of GNSS solution in indoors and considering the prob-lems encountered using a synchronous pseudolite system aand detailed in Section4.1, an alternative solution is adopted for indoor location and an asynchronouspseudolites network is used. In this section the position results obtained using anasynchronous pseudolite system and the RSSI approach, described in Section 4.2,are presented. Several tests were carried out in the same large office building men-tioned above. The first test is similar to the one described in Section 5.2.1. Themeasurement unit used for the test is the same as that shown in Figure 5.25 and iscomposed by:
� a u-blox LEA-6T receiver able to collect pseudolite signal;
� a GNSS patch antenna;
� a laptop for the storage of the measurements.
For the first series of tests, the transmitter were the three Universal Software RadioPlatform (USRP) pseudolites , described in [93] deployed as shown in Figure 5.28.The two configurations used for signal transmission are shown in Figure 5.27. Inparticular, a passive GNSS antenna was initially used for signal transmission asindicated in Figure 5.27 a). Although the antenna was passive and no additionalamplifier (only the USRP internal amplifiers were used) was present in the transmis-sion chain, the transmitted signal was too strong and saturated the receivers usedfor the data collection. In this way, information on the signal strength was lost.
To limit the transmit power, a second configuration, with the transmit antennaremoved was adopted Figure 5.27 b). The transmit power was reduced significantlyand saturation in the receiver front-end was avoided. When configuration b) wasused, it was possible to obtain useful information on the Received Signal Strength(RSS) and perform RSSI based positioning; so configuration b) was used for testanalyzed in the following.The pseudolite coordinates are provided in Table 5.15.
Table 5.15. Pseudolite coordinates
Device Latitude[deg] Longitude [deg]
Pseudolite 1 45.80960246 8.629953294Pseudolite 2 45.80970315 8.629947785Pseudolite 3 45.80988520 8.629839534
149

5 – Results - Testing and Analysis
USRP
Pseudolite
Antenna
removed
a) b)
Figure 5.27. USRP pseudolites. Two configurations used for signal transmis-sion. A passive GNSS antenna was initially used for signal transmission asindicated in a). To limit the transmit power, a second configuration, with thetransmit antenna removed was adopted b)
150

5.2 – Indoor Tests
Control Points
Figure 5.28. Location of the control points and of the three USRP pseudolites .
151

5 – Results - Testing and Analysis
5.2.3 Calibration Stage for the corridor test
In order to use the RSSI approach described in Section 4.2, the parameters K (theconstant accounting for the power of the transmitted signal) and α (the path-lossexponent) have to be knwon. This calibration process was performed by exploitingthe knowledge of the control point positions and their distances from the pseudo-lites. The distances of the 3 pseudolites from the different control points are shownin Figure 5.29 and have been used for estimating α and {Ki}N−1
i=0 Eq. (4.8). Thecalibration of the parameters was performed using the data in a trial data collection.The Carrier-to-Noise power spectral density ratio (C/N0) values depicted in Figure
5.30 are associated to the different control points. Thus it is possible to plot theaverage C/N0, observed at a specific control point, as a function of distance. Thedifferent measurements were then fitted according to model (4.6). The experimentalpoints obtained are depicted in Figure 5.31 as small empty circles whereas contin-uous lines represent the interpolated model. Model (4.6) effectively interpolatesexperimental measurements and the values obtained for the different parametersare provided in Table 5.16. Note that a single α has been determined for all themeasurements whereas Ki is a parameter specific to each pseudolite . The adoptionof pseudolite specific Ki is justified by the fact that the USRPs are not calibratedand each device can transmit a slightly different power. This phenomenon clearly
1 2 3 4 5 6 7 8 9 10
5
10
15
20
25
30
Control Point ID
Dis
tan
ce
s [
m]
PL - 1
PL - 2
PL - 3
Figure 5.29. Control point distances from the different pseudolites .
152

5.2 – Indoor Tests
50 100 150 200 2500
5
10
15
20
25
30
35
40
45
Time [s]
C/N
0
PL - 1PL - 2PL - 3
CP9CP8
CP7
CP6
CP5CP4
CP3
CP2
CP1
[dB
-Hz]
Figure 5.30. Estimated C/N0 values as a function of the control point location.
4 6 8 10 12 14 16 18 20
20
25
30
35
40
45
Distance [m]
C/N
0 [
dB
-Hz]
PL1 - Experimental
PL2 - Experimental
PL3 - Experimental
PL1 - Model fit
PL2 - Model fit
PL3 - Model fit
Figure 5.31. Calibration results interpolating C/N0 values as a function of distance.
153

5 – Results - Testing and Analysis
Table 5.16. Parameters for RSSI positioning obtained through calibration.
Parameter Value
α 5.1K1 82 dB(Hz·m)K2 75.5 dB(Hz·m)K3 87.2 dB(Hz·m)
emerges from Figure 5.31 which shows that pseudolite 3 has a larger Ki than pseu-dolite 2: experimental data lay on parallel curves and the adoption of a single Ki
it is not possible. Using the values reported in Table 5.16, it was finally possible toperform indoor location using C/N0 measurements.
5.2.4 Corridor test: results
Further tests were carried out after the calibration step. During the considered test,the user moved along the trajectory defined by the control points: the user wasstatic on each control point for about 20 seconds.The C/N0 values estimated using the u-blox receiver are plotted as a function oftime in Figure 5.32. During the first phase of the test (0-55 second), the user wasoutside the building and the pseudolite signals were attenuated by walls and thuswere too weak to be acquired. As shown in Figure 5.32, during the first part of thetest no information was available to perform RSSI positioning. Therefore results arepresented only for the portion of the test where valid measurements are available.The C/N0 values seem to represent the user’s location correctly; for instance, theblue curve of pseudolite 1 shows C/N0 values reaching their maximum (48 dB-Hz)when the user is on the third control point placed in front of the door of the roomwhere the first pseudolite was placed. When the user passes the third control pointa progressive decrease in C/N0 can be observed.
The C/N0 values are provided in Figure 5.32 to facilitate interpretation of theresults obtained in the position domain and discussed below. In particular, ananomalous behavior is noted in correspondence of control point 7.The C/N0 values depicted in Figure 5.32 were used to compute the user’s positionbased on the Weighted MSE (WMSE) algorithm presented in Section 4.2. The po-sition fixes are shown in Figure 5.33 along with the pseudolite and control pointcoordinates which were represented in the local frame, East North Up (ENU). Theorigin of the local frame is pseudolite 1, the Y axis is coincident with the Northdirection whereas the X axis is directed along the East direction.The trajectory along the corridor was characterized by a displacement of about
154

5.2 – Indoor Tests
0 50 100 150 2000
5
10
15
20
25
30
35
40
45
50
CP2
CP1
CP3CP4
CP5
CP6
CP7
CP8
CP9
Time [s]
C/N
0 [dB
-Hz]
PL1PL 2PL 3
Figure 5.32. Estimated C/N0 values as a function of time. The measurementspresented were used for demonstrating RSSI positioning.
25 meters in the North-South direction and only 5 meters in the East-West direc-tion. Note that the location of the pseudolites was dictated by the geometry of thebuilding which is mainly oriented along the North-South direction. Consequently,the 3 devices were able to provide useful information mainly for the estimation ofthe North coordinate. In fact, they were mainly distributed along the user trajec-tory. Thus the position fixes depicted in Figure 5.33 are mainly scattered along theEast-West direction. As already mentioned, the geometry along the East-West di-rection is quite poor due to the pseudolite displacement, i.e. the difference betweenpseudolite 1 and pseudolite 2 East coordinates is less than half a meter, and theonly device placed on the opposite side of the building was pseudolite 3. For thisreason, the error along the East-West direction reaches a maximum value of about10 meters. This occurs in correspondence of control point 7 which is characterizedby anomalous C/N0 measurements as highlighted in Figure 5.32. When excludingthe position fixes corresponding to control point 7, the East-West error is howeverlower than 5 meters. This result is considered positive given the geometry of thesystem and the quality of the measurements. Quality checks of the measurementswere not performed and no additional constraints, such as mapping and time do-main filtering, were implemented. Improved performance is expected by enhancingthe WMSE algorithm developed by introducing constraints and measurements from
155

5 – Results - Testing and Analysis
-15 -10 -5 0 5-5
0
5
10
15
20
25
30
35
40
East [Meters]
Nor
th [M
eter
s]
Computed PositionPseudoliteControl Point
Figure 5.33. Horizontal position estimates obtained using an RSSI based algorithm.
other sensors.To demonstrate the impact of the pseudolite geometry on the position solution, per-
formance along the North direction was analyzed separately in Figure 5.34, wherethe blue line represents the estimated North coordinates and the red dotted linerepresents the North coordinates of the control points expressed in the ENU frame.Form Figure 5.34, it emerges that the maximum error for the North coordinate hasa maximum values of about 7 meters in correspondence of control point 7. Again,the error is probably due to the anomalous behavior of the C/N0 values shown inFigure 5.32. For the remaining part of test the North component is characterizedby metric order accuracy.
156

5.2 – Indoor Tests
60 80 100 120 140 160 180 200 220
5
10
15
20
25
30
Time [s]
Nor
th [M
eter
s]
EstimatedReference
Control Point 7
Figure 5.34. North coordinate evolution as a function of time. The red dotted lineindicates the position of the control points.
5.2.5 Indoor navigation using asynchronous pseudolite sys-tem, repeatability test
Additional tests were carried out using a different pseudolite system, selecting dif-ferent environments and adding a prefiltering stage to smooth C/N0 measurements.The consistency of the navigation solution is investigated with the repeatability testsdescribed in Section 4.1.1. Although several experimetns were performed the resultsof a single test are presetned to avoid repetition of similar findings.During the test carried out the user performed five loops around a table presentin a large meeting room trying to repeat always the same trajectory. This type oftest has been carried out in order to verify the repeatability of the solutions. Thequality of the navigation solution is assessed by comparing the different trajectoriesestimated for the different loops. A high consistency level of the navigation solutionindicates the good performance of the system.The equipment used for the test is composed by:
� 4 pseudolites operating in the GPS L1 band and able to broadcast continuousand pulsed signals, the pseudolites are deployed as shown in Figure 4.3;
� a u-blox LEA-6T receiver able to collect pseudolite signals;
157

5 – Results - Testing and Analysis
� a GNSS patch antenna;
� an Android mobile phone, equipped with a suitable application, used to storagethe data.
The pseudolites are Commercial Off-the-Shelf (COTS) devices procured from SpaceSystem Finland (SSF) and described in [93].
5.2.6 Calibration Stage for repeatability test
The calibration of the system has been performed using measurements collectedduring experiments involving control points as discussed in Section 4.1.2. The cal-ibration process was performed by exploiting the knowledge of the control pointpositions and their distances from the pseudolites; the coordinates of the controlpoints are provided in Table 4.2. Two different approaches were considered for thecalibration: the first one considered different Ki for each pseudolite. In a secondattempt, a common K value was considered. The power parameters, Ki and thepath loss exponent, α, obtained for the first approach are summarized in Table 5.17.Calibration results interpolating C/N0 values as a function of distance are shown inFigure 5.35: the C/N0 values depicted are associated to the different control points.The experimental points obtained for the four pseudolites are depicted in Figure5.35 as small empty circles whereas dashed lines represent the interpolated model.The Ki parameters obtained are very similar confirming that the devices are cali-brated, i.e., broadcast similar power levels under similar propagation conditions. Inorder to exploit the fact that the SSF devices are calibrated and interpolation wasperformed considering a single K value (the index, i, was dropped for clarity). Thevalue obtained using this second approach are reported in Table 5.18. The curverepresenting the interpolated model using the same K for all the pseudolites is de-picted in Figure 5.36: the results are very close to the ones depicted in Figure 5.35,confirming that the two models are practically equivalent.
Table 5.17. Power parameters and path loss exponent for the meeting roomexperiments considering different received power levels.
Parameter Value
α 2.95K1 63.43 dB(Hz·m)K2 61.14 dB(Hz·m)K3 60.94 dB(Hz·m)K4 59.00 dB(Hz·m)
158

5.2 – Indoor Tests
3 4 5 6 7 8 9 1015
20
25
30
35
40
45
50
Distance [m]
C/N
0 [dB
-Hz]
PL1 - ExperimentalPL2 - ExperimentalPL3 - ExperimentalPL4 - ExperimentalPL1 - Model FitPL2 - Model FitPL3 - Model FitPL4 - Model Fit
Figure 5.35. Calibration results interpolating C/N0 values as a function of distanceconsidering different power parameters, Ki. Meeting room tests.
Table 5.18. Power parameter and path loss exponent for the meeting room exper-iments considering a single, K.
k α
60.66 3.02
159

5 – Results - Testing and Analysis
3 4 5 6 7 8 9 10 1115
20
25
30
35
40
45
50
Distance [m]
C/N
0 [dB
-Hz]
PL1 - ExperimentalPL2 - ExperimentalPL3 - ExperimentalPL4 - ExperimentalModel Fit
Figure 5.36. Calibration results interpolating C/N0 values as a function of distanceconsidering a single power parameter, K. Meeting room tests.
160

5.2 – Indoor Tests
5.2.7 Repeatability test results analysis
The raw C/N0 measurements collected during the repeatability test carried out inthe meeting room are depicted in Figure 5.37 as a function of time. Measurementsare not pre-processed and are characterized by high frequency noise variations. FromFigure 5.37 it is possible to identify the laps performed from the periodicity of thesignals. Raw measurements were used to compute position using the approach de-scribed in Section 4.2. Positioning results obtained using the raw measurements areshown in Figure 5.38. Although, the position solution obtained using these mea-surements is contained inside the room, it is not possible to identify the trajectoryfollowed by the user. In order to improve the solution, a pre-filtering stage was in-troduced on the measurements. A Butterworth filter of order 13 was adopted. Thecut-off frequency was determined by considering the spectral content of the C/N0
measurements: only the main lobe of the C/N0 Power Spectral Density (PSD) wasretained.The filtered measurements are depicted in Figure 5.39 whereas their normalizedPSDs are provided in Figure 5.40 along with the transfer function of the filter.Filtering removes high frequency noise components without distorting the low fre-quency variations of the C/N0 measurements. These variations are due to the usermotion. The laps performed by the user clearly appear in the smoothed measure-
20 40 60 80 100 120 140 1600
10
20
30
40
50
60
Time [s]
C/N
0 [dB
-Hz]
PL 1PL 2PL 3PL 4
LAP 1LAP 2 LAP 3 LAP 4 LAP 5
Figure 5.37. Estimated C/N0 values as a function of time. The measurementswere used for RSS positioning.
161

5 – Results - Testing and Analysis
-2 -1 0 1 2 3 4 5 6 7 80
1
2
3
4
5
6
7
8
9
10
East [Meters]
Nor
th [M
eter
s]
Estimated PositionPL
PL 3
PL 4 PL 1
PL 2
Figure 5.38. Position estimates obtained using the RSS algorithm andprocessing raw C/N0 measurements.
ments. It can be noted that after the second lap, a loss of lock occurred on thesignal broadcast by pseudolite 3. This is clearly indicated in Figure 5.39.The filtered measurements were used to compute the position solution using RSSalgorithm described in Section 4.2: the position estimated using the smoothed mea-surements is plotted in Figure 5.41. From Figure 5.41, the impact of filtering clearlyemerges: the user trajectory can be easily identified with a high level of consistenceamong the different laps. In order to further analyze the repeatability of the results,each lap is plotted singularly in Figure 5.42.
The position solution estimated for the four laps in Figure 5.42 is very consis-tent; only a slight difference (sub-meter level) between the different laps emerges,demonstrating the high repeatability and consistence of the test. In order to inves-tigate the effect of the loss of lock highlighted in Figure 5.39, the solution of lap 3is depicted in Figure 5.43. Although the loss of lock on the signal of pseudolite 3in the first part of the third lap degrades the position solution, the error is still ofmetric order demonstrating the robustness of the algorithm developed which is ableto provide reliable solutions using only three pseudolites. Only a slight degradationof the position accuracy is observed and is due to the change of the geometry.Exploiting the knowledge of the absolute position of the origin of the local frame,the solution computed can be easily transformed from the local frame to the WGS84
162

5.2 – Indoor Tests
20 40 60 80 100 120 140 160
5
10
15
20
25
30
35
40
45
50
55
60
Time [s]
C/N
0 [dB
-Hz]
PL1PL 2PL 3PL 4
Loss of Lock PL 3
LAP 2 LAP 4 LAP 5LAP 3LAP 1
Figure 5.39. Estimated C/N0 values as a function of time. Filtered C/N0 mea-surements using a Butterworth filter of order 13.
frame. The obtained solution is plotted using the Google Earth software in Figure5.44. From the analysis, it emerged that 3 pseudolites are sufficient to enable in-door navigation in a large meeting room with meter level accuracy. The use of 4pseudolites improves the geometry of the system further enhancing the accuracy ofthe solution.
163

5 – Results - Testing and Analysis
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-20
-15
-10
-5
0
5
10
15
Frequency [Hz]
Nor
mal
ized
PS
D [d
B]
Filter TransferFunction
Figure 5.40. PSDs of the C/N0 measurements and transfer function of the But-terworth filter used to pre-process raw observations.
1 2 3 4 5 6 7
1
2
3
4
5
6
7
8
9
10
East [Meters]
Nor
th [M
eter
s]
EstimatedPositionPL
Figure 5.41. Position estimates obtained using filtered C/N0 measurements.
164

5.2 – Indoor Tests
1 2 3 4 5 6
2
4
6
8
10
East [Meters]
Nor
th [M
eter
s]
2 4 6
2
4
6
8
10
East [Meters]
Nor
th [M
eter
s]
1 2 3 4 5 6
2
4
6
8
10
East [Meters]
Nor
th [M
eter
s]
1 2 3 4 5 6
2
4
6
8
10
East [Meters]
Nor
th [M
eter
s]
EstimatedPositionPL
LAP 2LAP 1
LAP 4 LAP 5
Figure 5.42. Position estimates obtained using filtered C/N0 measurements, eachlap is analyzed separately. Lap 3 is considered separately in Figure 5.43 in orderto better investigate the impact of loss of lock.
165

5 – Results - Testing and Analysis
1 2 3 4 5 6
1
2
3
4
5
6
7
8
9
10
East [Meters]
Nor
th [M
eter
s]
LAP 3
Estimated PositionPL
Figure 5.43. Effect of the loss of lock of one pseudolite signal in the positionestimates obtained using filtered C/N0 measurements. Third lap.
166

5.2 – Indoor Tests
Figure 5.44. Position solution in the WGS84 absolute coordinate system.Meeting room, repeatability test.
167

168

Chapter 6
Conclusions and future work
In this thesis, the performance of different Global Navigation Satellite System (GNSS)configurations, such as multi-constellation GPS/GLONASS and multi-constellationGPS/Galileo was assessed, in several environments from open-sky to indoors. Spe-cific interest was devoted to Location Based Service (LBS) in urban environments.Three different Receiver Autonomous Integrity Monitoring (RAIM) algorithms weredeveloped and the benefits of their use was evaluated in signal degraded scenariosin both position and velocity domains. The main motivation behind the multi-constellation approach is the lack of coverage of GPS in signal-degraded environ-ments such as urban canyons. These scenarios are characterized by the presenceof multiple blunders within the measurement set which signifincately degrade thelocation accuracy.The recent development of several GNSSs, such as the Erupean Galileo and theRussian satellite system GLONASS, suggest the combined use with GPS to in-crease continuity, accuracy and integrity of the navigation solution. GLONASS iscurrently the main candidate as component of a GNSS multi-constellation and it isthe only system fully operational along with GPS. Galileo has only 4 satellites andis still in its In Orbit Validation (IOV) phase.This thesis analyzed the multi-constellation opportunity, investigating GPS/Galileomulti-constellation solution using real data collected in open-sky. The performanceof multi-constellation GPS/GLONASS solution was investigated in urban canyonwith pedestrian data collections, highlighting the improvements provided by the in-clusion of the second GNSS measurememts.Although reliability and quality monitoring are not always available in signal de-graded environments due to a lack of redundancy, when available, they providesignificant enhancements to navigation reliability and accuracy. Reliability theory,in terms of reliability testing and statistical reliability conditions of a navigation sys-tem, was discussed. Classical RAIM techniques were analyzed and their limitations
169

6 – Conclusions and future work
in signal degraded scenarios were investigated; such limitations pushed the devel-opment of modified algorithms suitable to identify and reject multiple blunders. Inorder to improve the performance of the classical RAIM schemes, several additionalchecks were introduced to verify the geometry of the system and the correlationamong the measurements.The application of reliability theory in the Fault Detection and Exclusion (FDE)schemes developed was demonstrated using real-life data in different configurations.Performance of multi-constellation GPS/GLONASS navigationn in urban environ-ments in static and kinematic tests was evaluated applying the three schemes pro-posed, i.e., the Forward-Backward, the robust Danish estimation method, and theSubset Testing.The procedures (i.e., the Forward-Backward, the robust Danish estimation method,and the Subset Testing) considered demonstrated significant reliability and accu-racy improvements in signal degraded environments navigation. Although epoch-by-epoch Weighted LS (WLS) estimation was used to assess the reliability enhancementmethods implemented. The ideas introduced can be easily extended to Kalman fil-tering and, thus, widely applicable to various dynamic navigation applications. Ex-ploiting the concept adopted in a Kalman filter, i.e., hypotheses on the behavior ofthe unknowns, augmentation techniques, such as the use of pseudo-measurements,were introduced. The effects of pseudo-measurements, i.e. aiding on altitude andon inter-system bias, was evaluated using real data collected with different types ofreceivers.The advantages and the limitations of High-Sensitivity (HS) receivers were analyzedusing real data, and the performance of this type of receiver was compared to stan-dard devices.The extension of GNSS positioning to indoors, using HS receivers, was also eval-uated and alternative solutions using pseudolites were discussed. Performance ofsynchronous pseudolite systems were investigated and problems relative to the syn-chronization process discussed. Finally asynchronous pseudolite positioning using aReceived Signal Strength Indicator (RSSI) approach was analyzed.
6.1 Main results
This thesis considered reliability and quality monitoring at the user level for personalnavigation applications. Reliability monitoring was conducted on both position andvelocity solutions. The failure detection and exclusion methods developed proved tobe of great importance in signal degraded environments in order to provide reliableand accurate navigation solutions. Navigation errors were analyzed with real dataacquired in open-sky, urban canyon, and indoor scenarios.The main results obtained in this thesis can be conveniently summarized with respect
170

6.1 – Main results
to the scenarios considered.
Open-skyThe quality of Galileo PRs and PR rates on the E1BC and E5a frequencieswas analyzed. From the analysis of the Galileo observables the following con-clusions can be drawn:
� PR analysis demonstrates that IOV measurements are characterized bysimilar accuracies: for E1BC the PR RMS error varies from 0.31 m to0.37 m and the maximum error is of metric order.
� The analysis on the E1BC and E5a demonstrated that the E5a signal hasperformance similar to that of the E1bc signal. A performance degrada-tion is observed in the Galileo E5a measurements. This degradation wasnot expected but a similar phenomenon was observed for GIOVE-A mea-surements.
� PR-rates analysis demonstrates that the four Galileo satellites providesimilar measurement accuracies and differences are of mm/s order. Dif-ferences between E1 and E5a measurements are less evident than in thePR case.
� Galileo PR errors are reduced by almost 50% with respect to Global Po-sitioning System (GPS). The advantages of the European GNSS clearlyemerge in terms of maximum and Root Mean Square (RMS) errors.
� In both position and velocity domains the comparison between Galileoand GPS demonstrates the Galileo potentiality: the mean error is reducedof 2 meters in the position domain whereas in the velocity domain theconfigurations considered are characterized by similar performance withdifferences lower than 2 cm/s.
� The use of multi-constellation GSP/Galileo shown that the maximumpositioning error is only slightly reduced with respect to the GPS-onlycase.
Urban canyonCombined GPS/GLONASS positioning was attempted in urban scenarios andthe following conclusions were obtained:
� GPS/GLONASS multi-constellation solution shows evident improvementswith respect to stand-alone GPS in terms of solution availability and accu-racy, parameters which are usually considered critical in urban scenarios.
� The use of the GLObal NAvigation Satellite System (GLONASS) observ-ables provide an improvements of the solution availability of almost 10%with respect to the GPS only case.
171

6 – Conclusions and future work
� A reduction of RMS and maximum errors can be noted when GPS/GLONASSmeasurements are used together. The RMS values are reduced of onemeter for both horizontal and vertical components; more evident is theimprovements in the maximum error which is reduced of 8 meters in thehorizontal plane.
� The use of aiding, i.e. pseudo-measures on the altitude and on the inter-system bias, without quality control improves the solution availability,which is doubled with respect to the base-line configuration.
� Without RAIM application, aided configurations can degrade the navi-gation solution with respect to various aspects, above all for the lack ofblunder check.
� In urban scenarios the application of RAIM algorithms is necessary toidentify and reject several gross errors, which strongly degrade the navi-gation solution.
� The proposed RAIM (Forward-Backward, Danish and Subset methods)algorithms are analyzed in terms of reliable availability and of RMS andmaximum errors. The reliable availability is the percentage of time whenthe solution is declared reliable by the RAIM schemes adopted. Subsetmethod in characterized by the highest value of reliable availability butalso by the largest errors.
� The Forward-Backward and the Danish methods are characterized bysimilar performance and by the smallest errors, demonstrating the valid-ity of the separability check module (which cannot be applied to Subsetmethod).
� The three methods have been tested on both position and velocity do-mains, showing comparable robustness.
� The inclusion of GLONASS measurements provides benefits in terms ofreliable availability, accuracy and integrity due to the augmented redun-dancy which also improves the RAIM performance.
� In urban canyon, the use of the aid on the altitude along with RAIM,improve the performance of the vertical component for both RMS andmaximum values which are strongly reduced with respect to the base-line configuration. Such enhancements are clear for both GPS only andGPS/GLONASS cases.
� The use of aiding, along with RAIM algorithms, improves significantlythe performance in terms of both RMS and maximum position errors forhorizontal and vertical components.
172

6.2 – Future Work
� The comparison between a standard receiver and a HS device shows thatthe first receiver guarantees more accurate positioning but with a lowerreliable availability with respect to the other one. The use of a HS deviceseems justified for urban scenarios only when RAIM quality checks areimplemented.
IndoorsThe results obtained when investigating indoor navigation show that GNSSsignals are currently inadeguate for this task, due to several problems such assignal attenuation, fading and measurements biases due to multipath. Morespecifically the following finding were obtained.
� An alternative solution for indoor navigation is required. Pseudolite wasthus considered for its ability to provide GNSS-like signals, hence onlylittle modifications are required to the classical GNSS receivers. A pseu-dolite system was used in synchronous and asynchronous mode and per-formance analysis was carried out.
� The limitations of synchronous pseudolite systems were analyzed and itwas shown that multipath and other propagation problems can preventthe system from achieving the level of synchronization required for deter-mining travel time measurements.
� The results obtained indicated that synchronous pseudolite system is notsuitable for deep indoor navigation: the performance of an indoor navi-gation system can be significantly degraded by poor geometries and in-terference problems.
� Althoug a solution based on differential positioning was proposed, it wasnot possible to achieve reliable solution.
� Using asynchronous pseudolites , indoor navigation with meter level ac-curacy is possible and has been demonstrated.
� From the analysis, it emerged that 3 pseudolites are sufficient to enableindoor navigation in an office area of about 350 square meters with meterlevel accuracy.
6.2 Future Work
The results obtained demonstrate the benefit of the GPS/GLONASS multi-constellationwith respect to the GPS only case in urban scenarios; with this in mind a futuredevelopment of this research will include the Galileo system considering a multi-constellation GPS/GLONASS/Galileo.
173

6 – Conclusions and future work
The obtained results show the effectiveness of the algorithms adopted in terms ofreliable availability and of RMS and maximum errors.A possible extension of the work presented here is the adoption of reliability andquality monitoring for Kalman filtering, which provide improved estimations of thenavigation parameters for a dynamic user (assuming that the state and observationmodels are correct).Additional sensors, such as inertial units, and cellular network observables, DigitalVideo Broadcasting - Terrestrial (DVB-T) signals can be integrated as aiding toGNSS navigation in order to reach sufficient availability of navigation solution inurban and indoor scenarios.The results obtained in indoor environments are particularly encouraging, since theywere obtained without exploiting map constraints and prior knowledge of the userposition. The inclusion of such constraints and the propagation of the user position,for example using a Kalman filter, are currently under investigation and will be an-alyzed in future work. The integration between pseudolite and GNSS measurementsis still an open issue.
174

Bibliography
[1] J. F. Raquet. Navigation using pseudolites, beacons, and signals of opportu-nity. In Navigation Sensors and Systems in Global Navigation Satellite Systems(GNSS) Denied Environments, 2013.
[2] Cillian O’Driscoll, Daniele Borio, and Joaquim Fortuny. Scoping study onpseudolites. Technical report, EC Joint Reseach Centre, March 2011.
[3] Septentrio Satellite Navigation. PolaRxS Application Manual, Version 2.1.0September 30, 2010, 2010.
[4] JAVAD RIng Antenna.
[5] U.S. Department of Defense, U.S. Department of Homeland Security, andU.S. Department of Transportation. 2008 federal radionavigation plan. Tech-nical report, U.S. Department of Defense and U.S. Department of HomelandSecurity and U.S. Department of Transportation, 2008.
[6] C. ODriscoll, G. Lachapelle, and M. E. Tamazin. Investigation of the benefitsof combined gps/glonass receivers in urban environments. In NAV10, London,2010. Royal Institute of Navigation.
[7] H. Kuusniemi. User-Level Reliability and Quality Monitoring in Satellite-BasedPersonal Navigation. PhD thesis, Tampere University of Technology, Finland,2005. Publication 544.
[8] A. Wieser. High-sensitivity gnss: the trade-off between availability and accu-racy. In 3rd Symposium Geodesy for Geotechnical and Structural Engineering,2006.
[9] Z. He. High-Sensitivity GNSS Doppler and Velocity Estimation for Indoor Nav-igation. PhD thesis, Department of Geomatics Engineering, The University ofCalgary, Calgary, Canada, 2013.
[10] M. B. Kjrgaard, H. Blunck, T. Godsk, T. Toftkjr, D. L. Christensen, andK. Grnbk. Indoor positioning using gps revisited. In 8th international confer-ence on Pervasive Computing, 2010.
[11] Y. C. Lee and K. L. Van Dyke. Analysis performed in support of the ad-hocworking group of rtca sc-159 on raim/fde issues. In ION NTM, page 639654,San Diego, CA, 2002. Institute of Navigation.
[12] US Department of Defense. Global positioning system standard positioning
175

Bibliography
service performance standard. Technical report, US Department of Defense,September 2008.
[13] T. Walter and P. Enge. Weighted raim for precision approach. In ION GPS,page 19952004, Palm Springs, CA, September 1995. Institute of Navigation.
[14] Brown and R. Grover. A baseline gps raim scheme and a note on the equivalenceof three raim methods. NAVIGATION, Journal of The Institute of Navigation,39(3):301–316, 1992.
[15] T. Walter, P. Enge, J. Blanch, and B. Pervan. Vertical guidance of aircraftbased on modernized gps and new integrity augmentations. In IEEE SpecialIssue on Aviation Information Systems, volume 96, December 2008.
[16] A. Ene. Further development of galileo-gps raim for vertical guidance. In Pro-ceedings of the 19th International Technical Meeting of the Satellite Division ofThe Institute of Navigation (ION GNSS 2006), pages 2597–2607, Fort WorthConvention Center, Fort Worth, TX, September 2006. The Institute of Navi-gation.
[17] M. A. Sturza and A. K. Brown. Integrated gps/glonass for reliable receiverautonomous integrity monitoring (raim). In Proceedings of the 46th AnnualMeeting of The Institute of Navigation, pages 9–13, Atlantic City, NJ, June1990. The Institute of Navigation.
[18] P. B. Ober and D. Harriman. On the use of multiconstellation-raim for aircraftapproaches. In Proceedings of the 19th International Technical Meeting of theSatellite Division of The Institute of Navigation (ION GNSS 2006), pages 2587–2596, Fort Worth, TX, September 2006.
[19] A. Angrisano, S. Gaglione, and G. Del Core C. Gioia. Gnss reliability testing insignal-degraded scenario. Internation Journal of Navigation and Observation,1:1–12, 2013.
[20] B. S. Pervan, D. G. Lawrence, and B.W. Parkinson. Autonomous fault detec-tion and removal using gps carrier phase. IEEE Trans. Aerospace and ElectronicSystems, 3:897906, July 1998.
[21] R. Hatch, T. Sharpe, and Y. Yang. A simple raim and fault isolation scheme.In ION GPS, page 801808, Portland, OR., September 2003. Institute of Navi-gation.
[22] S. Ryan. Augmentation of DGPS for Marine Navigation. PhD thesis, Depart-ment of Geomatics Engineering, The University of Calgary, Calgary, Canada,2002.
[23] G. MacGougan and J. Liu. Fault detection methods and testing for marinegps receivers. In ION GPS, page 26682678, Portland, OR, September 2002.Institute of Navigation.
[24] H. Kuusniemi, A.Wieser, G. Lachapelle, and J. Takala. User-level reliabilitymonitoring in urban personal satellite-navigation. IEEE TRANSACTIONSON AEROSPACE AND ELECTRONIC SYSTEMS, 43(4):1305–1318, October
176

Bibliography
2007.
[25] A. Angrisano, S. Gaglione, and C. Gioia. Raim algorithms for aided gnss inurban scenario. In Ubiquitous Positioning, Indoor Navigation, and LocationBased Service (UPINLBS), 2012. ISBN: 978-1-4673-1908-9.
[26] C. Cai and Y. Gao. A combined gps/glonass navigation algorithm for use withlimited satellite visibility. THE JOURNAL OF NAVIGATION, 62:671–685,2009.
[27] A. Angrisano, S. Gaglione, and C. Gioia. Performance assessment ofgps/glonass single point positioning in an urban environment. Acta Geodaeticaet Geophysica, 48:149–161, June 2013.
[28] B. Hoffmann-Wellenhof, H. Lichtenegger, and J. Collins. Global PositioningSystem: Theory and Practice. Springer, 1992.
[29] B. Parkinson, J. Spilker Jr., P. Axelrad, and P. Enge (Author). Global Po-sitioning System: Theory And Applications, volume I. American Institute ofAeronautics and Astronautics, Washington D.C., USA, 1996.
[30] DoD Positioning Navigation and Timing Executive Committee. Gps standardpositioning service performance standard. Technical report, DoD PositioningNavigation and Timing Executive Committee, September 2008.
[31] Russian Institute of Space Device Engineering. Global navigation satellite sys-tem glonass interface control document. Technical Report Edition 5.1, RussianInstitute of Space Device Engineering, Moscow, 2008.
[32] E. D. Kaplan. Understanding GPS: Principles and Applications. Second Edi-tion. Artech House, November 2005.
[33] Navstar GPS Directorate. Global positioning systems directorate systems engi-neering & integration interface specification is-gps-200. Technical report, Navs-tar GPS Directorate, September 2012.
[34] European Union. European gnss (galileo) open service signal in space interfacecontrol document. OS SIS IC 1.1, European Union, September 2010.
[35] J. F. Raquet. Development of a Method for Kinematic GPS Carrier-Phase Ambiguity Resolution Using Multiple Reference Receivers.PhD thesis, University of Calgary, 1998. UCGE Report 20116http://www.ensu.ucalgary.ca/links/GradTheses.html.
[36] J. A. Klobuchar. Ionospheric time-delay algorithm for single-frequency gpsusersionospheric time-delay algorithm for single-frequency gps users. IEEETransactions on aerospace and electronic systems, AES- 23, N. 3:325–331, 1987.
[37] A. Angrisano, S. Gaglione, C. Gioia, M. Massaro, and U. Robustelli. As-sessment of nequick ionospheric model for galileo single-frequency users. ActaGeophysica, 2:1–20, April 2013.
[38] J. Sastamoinen. Contribution to the theory of atmospheric refraction, part iirefraction correction in satellite geodesy. Bulletin Geodesique, 107:13–34, 1993.
177

Bibliography
[39] D. A. Vallado. Covariance transformations for satellite flight dynamics opera-tions. In AAS/AIAA Astrodynamics Specialist Conference, 2003.
[40] O. Mezentsev. Sensor Aiding of HSGPS Pedestrian Navigation. PhD thesis,Department of Geomatics Engineering, University of Calgary, Canada, 2005.UCGE Report No. 20212.
[41] S. Godha. Performance evaluation of low cost mems-based imu integrated withgps for land vehicle navigation application. Master’s thesis, Department ofGeomatics Engineering, University of Calgary, Canada, 2006. UCGE ReportNo. 20239.
[42] J. A. Farrell and M. Barth. The Global Positioning System & Inertial Naviga-tion. McGraw-Hill Professional, 1998.
[43] Y. Bar-Shalom, X. Rong Li, and T. Kirubarajan. Estimation with Applicationsto Tracking and Navigation. John Willey and Sons, New York, June 2001.
[44] E. M. Mikhail. Observations and Least Squares. IEP, 1976.[45] R. G. Brown and P. Y. C. Hwang. Introduction to Random Signals and Applied
Kalman Filtering. Wiley, 1996.[46] N. El-Sheimy. Inertial techniques and ins/dgps integration, 2004. ENGO 623-
Course Notes, Department of Geomatics Engineering, University of Calgary,Canada.
[47] B. W. Remondi. Computing satellite velocity using the broadcast ephemeris.GPS Solutions, III:181–183, 2004.
[48] H. S. Hopfield. Two quartic tropospheric reflectivity provile for correcting satel-lite data. Journal of Geophysical Research, Vol. 74:4487–4499, 1986.
[49] Special Committee 159. Minimum operational performance standards for globalpositioning system/wide area augmentation system airborne equipment, rtca.Technical Report Document DO-229D, RTCA, 1828 L Street, NW, Suite 805Washington, DC 20036, November 2001.
[50] S. Kuang. Geodetic Network Analysis and Optimal Design: Concepts and Ap-plications. Ann Arbor Press, 1996.
[51] J. L. Farrell and F. V. Graas. Statistical validation for gps integrity test.NAVIGATION, Journal of The Institute of Navigation, V:89102, 1998. RedBook of RAIM.
[52] A. K. Brown. Receiver autonomous integrity monitoring using a 24-satellite gpsconstellation. NAVIGATION, Journal of The Institute of Navigation, V:2133,1998. Red Book of RAIM.
[53] M. Petovello. Real-time Integration of a Tactical-Grade IMU and GPS for High-Accuracy Positioning and Navigation. PhD thesis, Department of GeomaticsEngineering, University of Calgary, Calgary, 2003. UCGE Report No. 20173.
[54] W. Baarda. A testing procedure for use in geodetic networks. Publicationon Geodesy New Series 2. No. 5, Netherlands Geodetic Commission, Delft,Netherlands, 1968.
178

Bibliography
[55] J.Wang S. Hewitson. Impact of dynamic information on gnss receiver integritymonitoring. In International Symposium on GNSS/GPS, Sydney, Australia,December 2004.
[56] G. Lachapelle S. Ryan. Augmentation of dgnss with dynamic constraints formarine navigation. In ION GPS, Nashville, TN,, September 1999. Institute ofNavigation.
[57] G. Lachapelle A. Wieser, M. Petovello. Failure scenarios to be considered withkinematic high precision relative gnss positioning. In ION GNSS, 2004.
[58] P. J. G. Teunissen. GPS for Geodesy. Springer, 2nd edition edition, 1998.[59] J. H. KRAEMER G. Y. CHIN. Gps raim: Screening out bad geometries under
worst-case bias conditions. NAVIGATION: Journal of The Institute of Navi-gation, 39:117–137, 1992.
[60] G.Y: Chin R.G. Brown. Gps raim calculation of threshold and protection radiususing chi-square methods - a geometric approach. NAVIGATION, Journal ofThe Institute of Navigation, V:155179, 1997.
[61] J. Wang S. Hewitson. Gnss receiver autonomous integrity monitoring (raim)performance analysis. GPS Solutions, 10:155–170, 2006.
[62] T. Y. Shih C. S. Hsieh. On gross error detection methods for control points inimage registration. Journal of C.C.I.T., 34:1–17, 2006.
[63] S.M. Chamberlain. Combined gps/glonass navigation,. In Proceedings, Telesys-tems Conference, 1991.
[64] C. Cai. Precise point positioning using dual-frequency gps and glonass mea-surements. Master’s thesis, UNIVERSITY OF CALGARY DEPARTMENTOF GEOMATICS ENGINEERING, 2009.
[65] Z. Wang Y. Zhang. Analyses and solutions of errors on gps/glonass positioning.Goa-spatial Information, Volume 5, Issue 2, June 2002:6–12, 2002.
[66] M. P. Stewart A. Leick J. Wang, C. Rizos. Gps and glonass integration: Model-ing and ambiguity resolution issues. GPS Solutions, Vol. 5, No. 1:55–64, 2001.
[67] C. Gioia D. Borio J. Fortuny-Guasch A. Angrisano, S. Gaglione. Testing thetest satellites: the galileo iov measurement accuracy. In International Confer-ence on Localization and GNSS (ICL-GNSS), 2013.
[68] B. Burke P. Misra, M. Pratt. Augmentation of gps/laas with glonass: perfor-mance assessment. In ION GPS-98. 11th Int. Technical Meeting of the SatelliteDivision of the Institute of Navigation, 1998.
[69] Z. Altamimi C. Boucher. Itrs, pz-90 and wgs 84: current realizations and therelated transformation parameters. Journal of Geodesy, 75:613–619, 2001.
[70] C. Gioia A. Angrisano, S. Gaglione. Performance assessment of aided globalnavigation satellite system for land navigation. IET Radar, Sonar & Naviga-tion, 7:671680, 2013.
[71] Stewart H. Cobb. GPS pseudolites: Theory, Design and Applications. Phdthesis, Stanford University, September 1997.
179

Bibliography
[72] T. A. Stansell. Rtcm sc-104 recommended pseudolite signal specification. NAV-IGATION: Journal of The Institute of Navigation, 33(1):42–59, 1986.
[73] D. Borio C. O’Driscoll and J. Fortuny-Guasch. Investigation of pulsing schemesfor pseudolite applications. In In Proc. of the ION/GNSS, Portland, OR,September 2011.
[74] M. Ishii H. Torimoto S. Kogure-H. Maeda. D. Manandhar, K. Okano. De-velopment of ultimate seamless positioning system based on qzss imes. In InProc. of the 21st International Technical Meeting of the Satellite Division ofThe Institute of Navigation (ION GNSS 2008), 2008.
[75] A. Dempster. Qzss’s indoor messaging system gnss friend or foe? Inside GNSS,4(1) January/February:37–40, 2009.
[76] Japan Aerospace Exploration Agency. Interface specification for qzss (is-qzss),.Technical report, JAXA, 2010.
[77] A. ANGRISANO, S. GAGLIONE, C. GIOIA, U. ROBUSTELLI, and M. VUL-TAGGIO. Giove satellites pseudorange error assessment. JOURNAL OF NAV-IGATION, 65:29–40, 2012.
[78] J. T. Curran, Petovello M., and Lachapelle G. Plan group tracks galileo satel-lites for positioning in canada. GPS World, March:1, 2013.
[79] P. Steigenberger, U. Hugentobler, O. Montenbruck, and A. Hauschild A. Preciseorbit determination of giove-b based on the congo network. Journal of Geodesy,85:357365, 2011.
[80] A. Simsky, D. Mertens, J-M. Sleewaegen, M. Hollreiser, and M. Crisci. Ex-perimental results for the multipath performance of galileo signals transmittedby giove-a satellite. International Journal of Navigation and Observation, I:13,2008.
[81] A. Simsky, D. Mertens, J-M. Sleewaegen, M. Hollreiser, and M. Crisci. Multi-path and tracking performance of galileoranging signals transmitted by giove-a.In 20th International Technical Meeting of the Satellite Division of The Instituteof Navigation, 2007.
[82] J. A. A. Rodriguez, G. W. Hein, IM. rsigler, and T. Pany. Combined galileo/gpsfrequency and signal performance analysis. In ION GNSS 2004 Long BeachCalifornia, 2004.
[83] G. Xu. GPS: Theory, Algorithms and Applications. Springer-Verlag BerlinHeidelberg, 2003.
[84] H. Laitinen and M. Strom. Single-frequency carrier navigation in a synchronisedpseudolite network. In Proc. of the European Navigation Conference ENC-GNSS, pages 1–8, Naples, Italy, May 2009.
[85] Space System Finland. GSG-L1 GPS Signal Generator User’s Manual, Febru-ary 2007.
[86] Space System Finland. User’s Manual Pseudolite Navigation System, March2010.
180

Bibliography
[87] Jonas Lindstrom, Dennis M. Akos, Oscar Isoz, and Marcus Junered. GNSSinterference detection and localization using a network of low cost front-endmodules. In Proc. of the 20th International Technical Meeting of the Satel-lite Division of The Institute of Navigation ION/GNSS, pages 1165–1172, FortWorth, TX, September 2007.
[88] D. Fontanella, R. Bauernfeind, and B. Eissfeller. In-car GNSS jammer localiza-tion with a vehicular ad-hoc network. In Proc. of the 25th International Techni-cal Meeting of The Satellite Division of the Institute of Navigation ION/GNSS,pages 2885–2893, Nashville, TN, September 2012.
[89] N. Patwari, J.N. Ash, S. Kyperountas, A.O. Hero III, R. L. Moses, andN.S.Correal. Locating the nodes: cooperative localization in wireless sensornetworks. 22(4):54–69, July 2005.
[90] Logan Scott. J911: The case for fast jammer detection and location usingcrowdsourcing approaches. In Proc. of the 24th International Technical Meetingof The Satellite Division of the Institute of Navigation ION/GNSS, pages 1931–1940, Portland, OR, September 2011.
[91] Oscar Isoz, Asghar T. Balaei, and Dennis Akos. Interference detection andlocalization in the GPS l1 band. In Proc. of the International Technical Meetingof The Institute of Navigation (ITM/ION), pages 925–929, San Diego, CA,January 2010.
[92] I. Kraemer, P. Dykta, R. Bauernfeind, and B. Eissfeller. Android GPS jam-mer localizer application based on C/N0 measurements and pedestrian deadreckoning. In Proc. of the 25th International Technical Meeting of The SatelliteDivision of the Institute of Navigation ION/GNSS, pages 3154–3162, Nashville,OR, September 2012.
[93] D.Borio and C.Gioia. Indoor navigation using asynchronous pseudolites. In 6thEuropean Workshop on GNSS Signals and Signal Processing, 2013.
181