
GNR401M Remote Sensing and Image Processing - IIT …avikb/GNR401/DIP/BKM-NRM401-GL3-4... ·...
62
10/17/2013 1 GNR401M Remote Sensing and Image Processing Guest Instructor: Prof. B. Krishna Mohan CSRE, IIT Bombay [email protected] Slot 5 Guest Lectures 3 – 4 Neighborhood Operations Sept. 25, 27 2013 9.30 AM – 11.00 AM Contents of the Lectures Neighborhood Operations • Concept of Neighborhood Operations • Utility of neighborhood in smoothing and edge enhancement • Image smoothing algorithms • Gradient operations • Edge enhancement using gradient operators IIT Bombay Slide 1 GNR607 GL 3 - 4 B. Krishna Mohan Sept. 25, 27 2013 GL 3 – 4 Neighborhood Opns
Transcript of GNR401M Remote Sensing and Image Processing - IIT …avikb/GNR401/DIP/BKM-NRM401-GL3-4... ·...
10/17/2013
1
GNR401M Remote Sensing and Image
ProcessingGuest Instructor: Prof. B. Krishna
Mohan
CSRE, IIT Bombay
Guest Lectures 3 – 4 Neighborhood Operations
Sept. 25, 27 2013
9.30 AM – 11.00 AM
Contents of the Lectures
Neighborhood Operations
• Concept of Neighborhood Operations
• Utility of neighborhood in smoothing and edge enhancement
• Image smoothing algorithms
• Gradient operations
• Edge enhancement using gradient operators
IIT Bombay Slide 1
GNR607 GL 3 - 4 B. Krishna Mohan
Sept. 25, 27 2013 GL 3 – 4 Neighborhood Opns
10/17/2013
2
NEIGHBORHOOD OPERATIONS
IIT Bombay Slide 2
GNR607 GL 3 - 4 B. Krishna Mohan
Pixel and Neighborhood
A B C
D X E
F G H
• Pixel under consideration X
• Neighbors of X are A, C, F,H, B,D,E,G
• Size of neighborhood = 3x3
• Neighborhoods of size mxn m and n are odd; Unique pixel at the centre of the neighborhood
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 3
10/17/2013
3
4-neighborhoods
A B C
D X E
F G H
• B,D,E and G are the 4-neighborhood of X
• 4-neighbors are physically closest to X, at
one-unit distance
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 4
8-neighborhood
A B C
D X E
F G H
• A,C,F and H are ALSO included with B,D,E,G as neighbors; 8-pixel set is the 8-neighborhoodof X
• A,C,F and H are the diagonal neighbors, sqrt(2)
times farther from X
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 5
10/17/2013
4
Larger Neighborhoodso o o o o
o o o o o
o o X o o 5 x 5 neighborhood
o o o o o
o o o o o
• Larger neighborhoods used based on need; computational load varies exponentially with size of neighborhood
• 3x3 � 9 neighbors; 5x5 � 25 neighbors …
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 6
Point Operations v/s Neighborhood Operations
• Point operations do not alter the sharpness or resolution of the image
• Gray level associated with a pixel is manipulated independent of the gray levels associated with neighbors
• Pixel operations cannot deal with noise in the image, nor highlight local features like object boundaries
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 7
10/17/2013
5
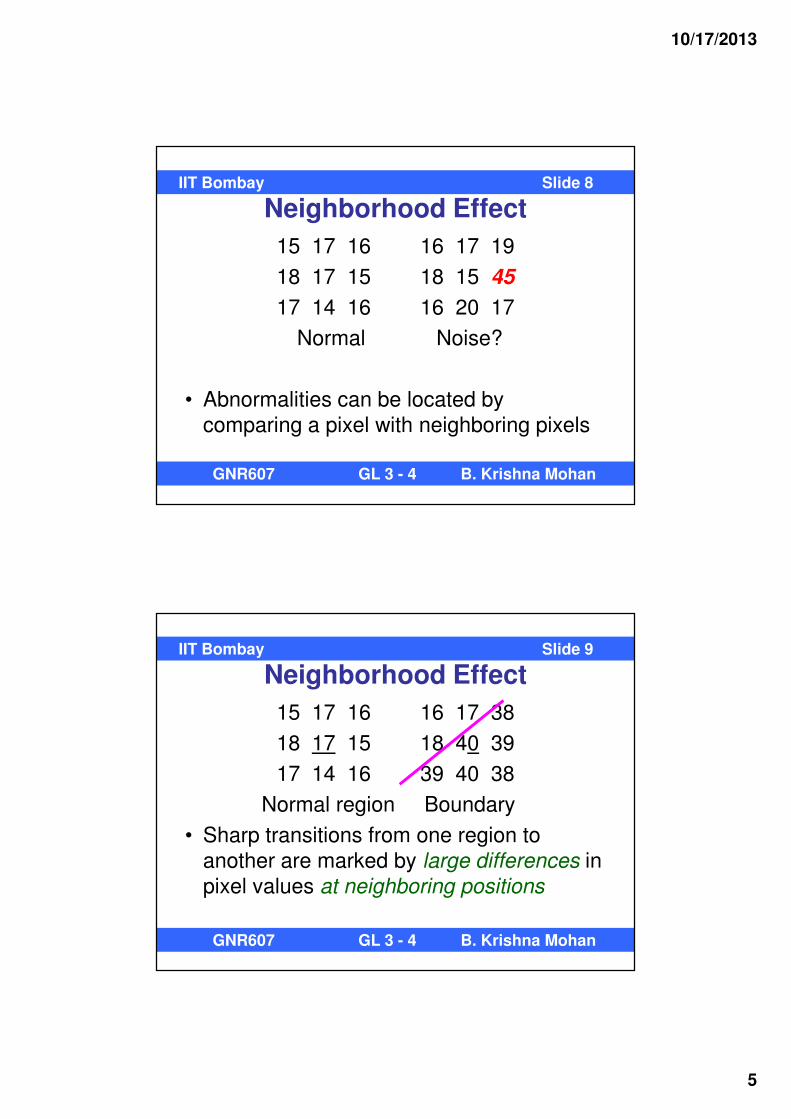
Neighborhood Effect
15 17 16 16 17 19
18 17 15 18 15 45
17 14 16 16 20 17
Normal Noise?
• Abnormalities can be located by
comparing a pixel with neighboring pixels
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 8
Neighborhood Effect
15 17 16 16 17 38
18 17 15 18 40 39
17 14 16 39 40 38
Normal region Boundary
• Sharp transitions from one region to
another are marked by large differences in
pixel values at neighboring positions
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 9

10/17/2013
6
Neighborhood Operations
• Results of operations performed on the neighborhood are posted at the location of the central pixel
• The values in the input image are not overwritten, instead the results are stored in an output array or file
• Cannot be computed in real time since the configurations of gray levels in the neighborhood are very large
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 10
Neighborhood Operations
• Simple averaging
A B C
D X E
F G H
• g(X) = (1/9)[f(A) + f(B) + f(C) + f(D) + f(X) +
f(E) + f(F) + f(G) + f(H)]
• The output gray level is the average of the gray levels of all the pixels in the 3x3 neighborhood
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 11
10/17/2013
7
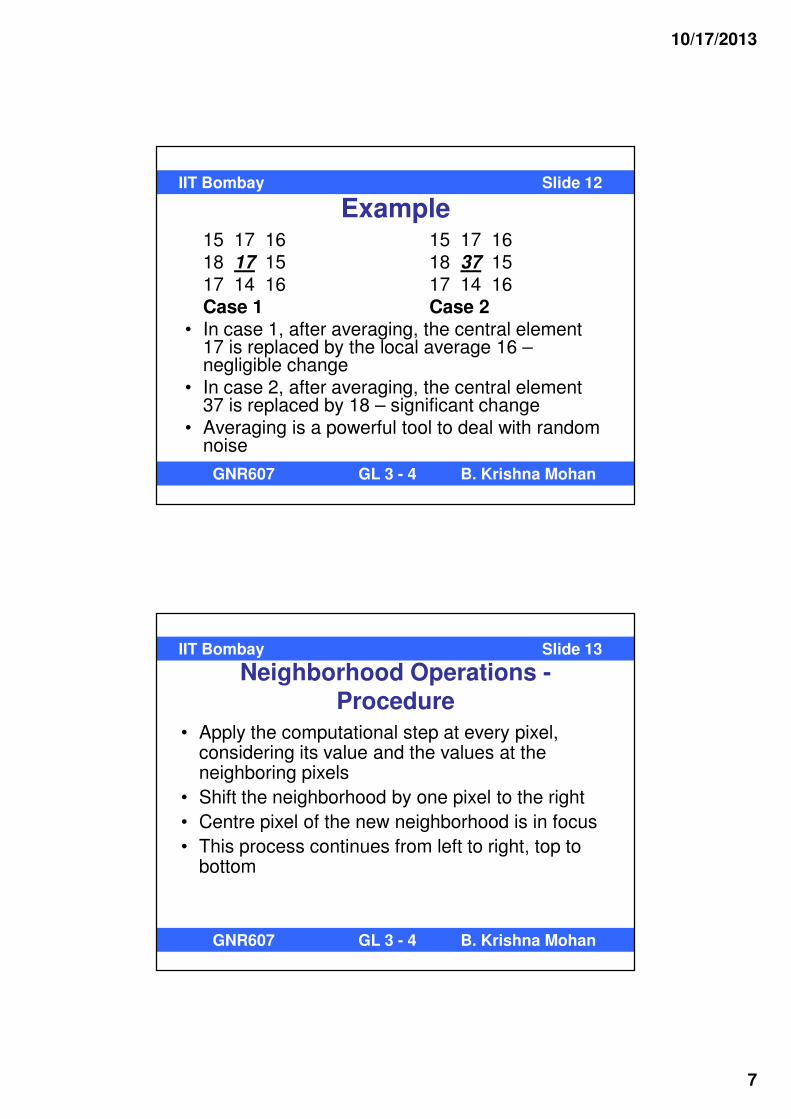
Example15 17 16 15 17 1618 17 15 18 37 1517 14 16 17 14 16Case 1 Case 2
• In case 1, after averaging, the central element 17 is replaced by the local average 16 –negligible change
• In case 2, after averaging, the central element 37 is replaced by 18 – significant change
• Averaging is a powerful tool to deal with random noise
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 12
Neighborhood Operations -Procedure
• Apply the computational step at every pixel, considering its value and the values at the neighboring pixels
• Shift the neighborhood by one pixel to the right
• Centre pixel of the new neighborhood is in focus
• This process continues from left to right, top to bottom
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 13

10/17/2013
8
Image
Processing step
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 14
Mathematical form for averaging
• In general, we can write
g(X) =
where K is the number of neighbors Ai. A5 refers to X, the central pixel for a 3x3 neighborhood.
• It is obvious that all neighbors are given equal weightage during the averaging process
1
( )
| ( ) |
K
i
i
f A
N X
=
∑
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 15

10/17/2013
9
General form for averaging• To assign different weights for different neighbors,
g(X) =
• For simple averaging over a 3x3 neighborhood, wi = (1/9), i=1,2,…,9
• Weights can be altered for 4-neighbors and 8-neighbors. In such a case, wi is not a constant for all values of i.
1
1
( )K
i i
i
K
i
i
w f A
w
=
=
∑
∑
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 16
Averaging as Space Invariant Linear Filtering
• Simple averaging can be represented as a linear space
invariant operation:
k,l= -w, …, 0, …, w
For a 3x3 window, w=1; For 5x5 window, w=2, …
, , ,
,
1
(2 1)(2 1)
l j wk w
i j k l i k j l
k w l j w
k l
g h f
hw w
= +=
− −= = −
=
=+ +
∑ ∑
2-d discrete convolution of h with f; g = f*h
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 17
10/17/2013
10
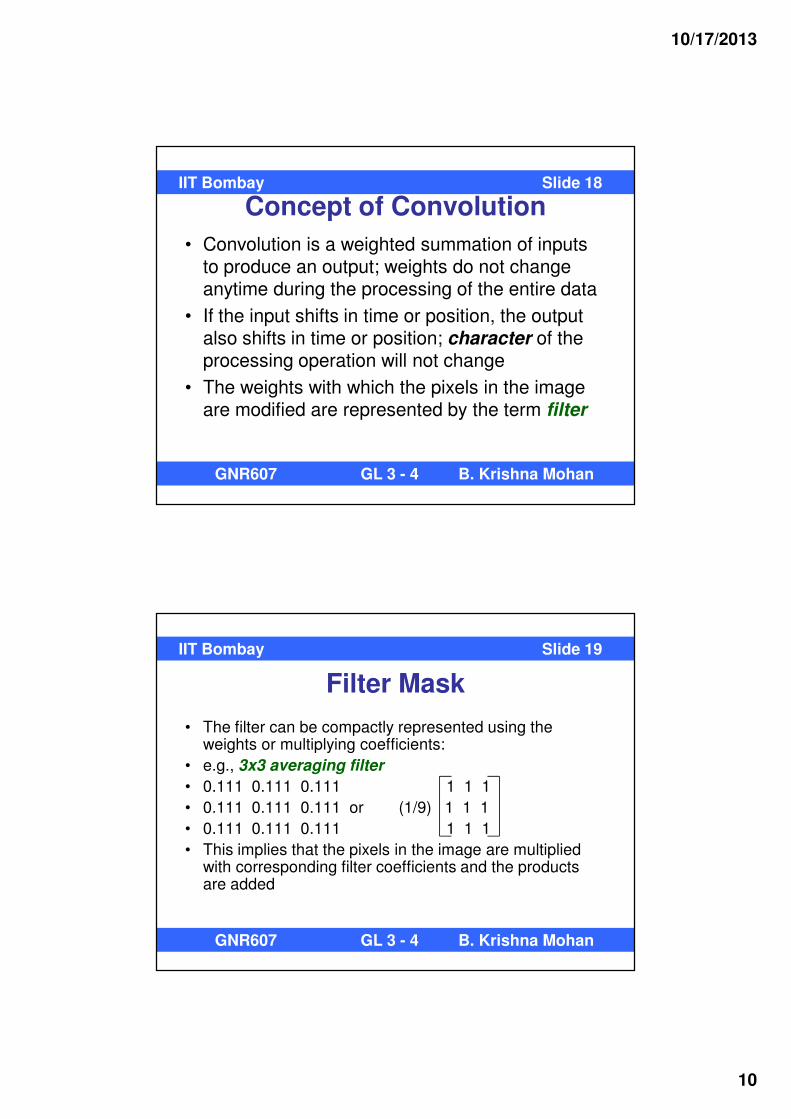
Concept of Convolution
• Convolution is a weighted summation of inputs to produce an output; weights do not change anytime during the processing of the entire data
• If the input shifts in time or position, the output also shifts in time or position; character of the processing operation will not change
• The weights with which the pixels in the image are modified are represented by the term filter
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 18
Filter Mask
• The filter can be compactly represented using the weights or multiplying coefficients:
• e.g., 3x3 averaging filter
• 0.111 0.111 0.111 1 1 1
• 0.111 0.111 0.111 or (1/9) 1 1 1
• 0.111 0.111 0.111 1 1 1
• This implies that the pixels in the image are multiplied with corresponding filter coefficients and the products are added
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 19

10/17/2013
11
Reduced neighborhood influence
0.05 0.15 0.05
0.15 0.20 0.15
0.05 0.15 0.05
• Central pixel is given 20% weight, 4-neighbors 15% weight. Diagonal neighbors given 5% weight.
• Note that the weights are all positive, and sum to unity
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 20
Discrete Convolution
• In general, all the filter coefficients need
not be equal or symmetric
• In that case, the weighted averaging
operation has to be performed using a
discrete convolution procedure
• This is a general operation, assuming that
the process is space invariant.
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 21

10/17/2013
12
Discrete Convolution
• gi,j =
• The filter coefficients are mirror-reflected around the central element, and then the filter is slid on the input image
• The filter moves from top left to bottom right, moving one position at a time
• For each position of the filter, an output value is computed
, ,
w w
k l i k j l
k w l w
h f − −=− =−
∑ ∑
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 22
Image
Filter Mask
IIT Bombay Slide 23
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
13
Border Effect
• The computation of the filtering operation
is applicable at those positions of the
image where the filter completely fits
inside.
• At the boundary positions, only part of the
filter fits inside the image. At such
positions, the computation is arbitrarily
defined
IIT Bombay Slide 24
GNR607 GL 3 - 4 B. Krishna Mohan
Smoothing• Weighted averaging also referred to as image smoothing
• By smoothing, local differences between pixels are reduced
• Images are often filtered using the same operator throughout, implying shift-invariance
• Most image display adaptors, have hardware convolvers built in to perform 3x3 convolutions in real-time.
• Shift-variant filtering is chosen when local information is to be preserved.
IIT Bombay Slide 25
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
14
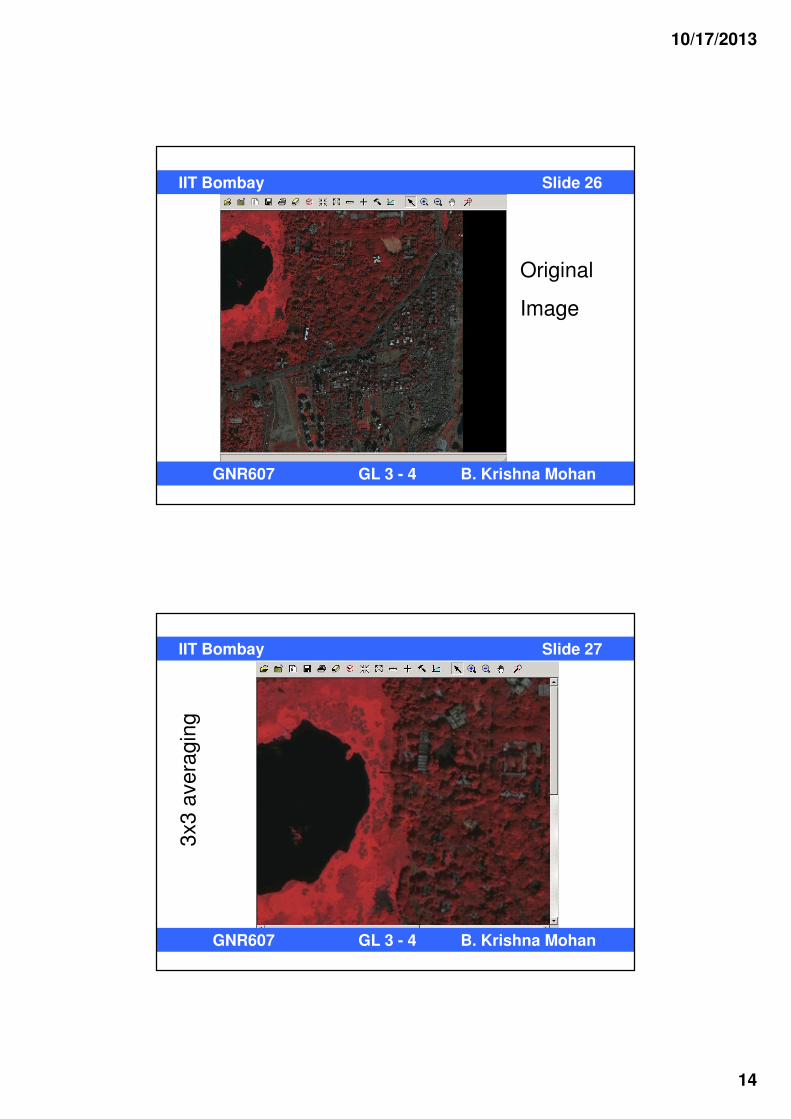
Original
Image
IIT Bombay Slide 26
GNR607 GL 3 - 4 B. Krishna Mohan
3x3
ave
rag
ing
IIT Bombay Slide 27
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
15
Gaussian smoothing
• Gaussian filter: linear smoothing
• weight matrix
for all
W: one or two σ from center
)(2
12
22
),( σ
cr
kecrw
+−
=
,),( Wcr ∈
∑∈
+−
=
Wcr
cr
e
k
),(
)(2
12
22
1
σ
IIT Bombay Slide 28
GNR607 GL 3 - 4 B. Krishna Mohan
Gaussian smoothing• Specify neighborhood size, and σ, get W(r,c) by varying
r,c in the range [–W/2 +W/2]
• Alternatively, find the size of the neighbourhood from 3 σ
limits
• About 99% of the Gaussian distribution is covered within the range mean±3 3 σ
-3 σ ≤ r,c ≤ 3 σ
• If σ = 1, -3 ≤ r,c ≤ 3, size of neighbourhood is 7x7
IIT Bombay Slide 28a
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
16
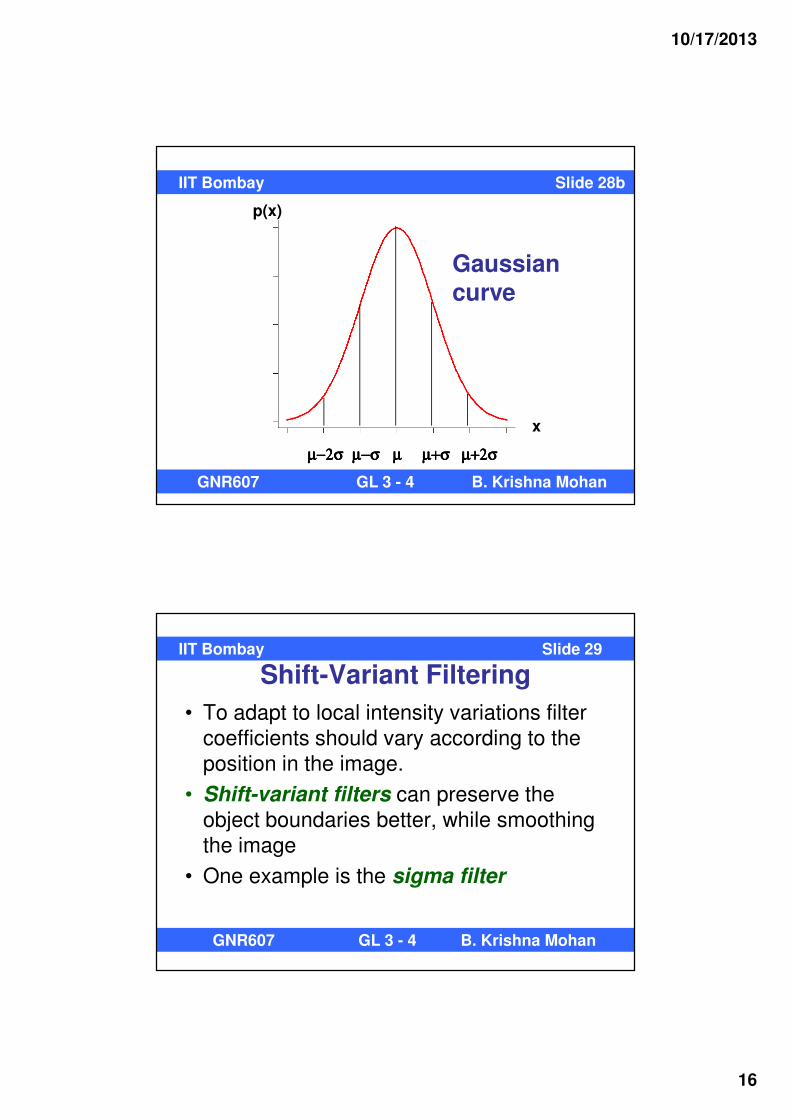
IIT Bombay Slide 28b
GNR607 GL 3 - 4 B. Krishna Mohan
x
p(x)
µµµµ−−−−2σ2σ2σ2σ µµµµ−−−−σσσσ µ µ+σ µ+2σµ µ+σ µ+2σµ µ+σ µ+2σµ µ+σ µ+2σ
Gaussian curve
Shift-Variant Filtering
• To adapt to local intensity variations filter
coefficients should vary according to the
position in the image.
• Shift-variant filters can preserve the
object boundaries better, while smoothing
the image
• One example is the sigma filter
IIT Bombay Slide 29
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
17
Sigma filter• The underlying principle here is to take the subset of
pixels in the neighborhood whose gray levels lie within c.σof the central pixel gray level
• hi,j,k,l = 0 if |fi-j,k=l – fij | > c.σij ; hi,j,k,l = 1 otherwise
σij is the local standard deviation of the gray levels within
the neighborhood centred at pixel (i,j)
• To save time, one can also use global std. dev.
• c = 1 or 2 depending on the size of neighborhood
, , , , , l j wk i w
i j i j k l i k j l
k i w l j w
g h f= += +
− −= − = −
= ∑ ∑
IIT Bombay Slide 30
GNR607 GL 3 - 4 B. Krishna Mohan
Sigma Filter Algorithm• Consider neighborhood size, and value of c
• Find the mean and standard deviation of the pixels within the neighborhood
• Find the neighbors of the central pixel whose gray levels are within c.σ of the central pixel’s gray level
• Compute the average of the pixels meeting the above criterion
• Replace the central pixel’s value by the average
• This cannot be replaced by a convolution since the filter response varies for each position in the image
IIT Bombay Slide 31
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
18
Comments on Sigma Filter• Degradation of a smoothed image is due to blurring of
object boundaries
• Here boundaries are better preserved by limiting the smoothing only to a homogeneous subset of pixels in the neighborhood
• The selected subset comprises those pixels that have similar intensities
• Pixels with very different intensities are excluded by making corresponding weights equal to 0
IIT Bombay Slide 31a
GNR607 GL 3 - 4 B. Krishna Mohan
Lee filter
Simple Lee filter
• gij = fmean + k.(fij – fmean)
• k varies between 0 and 1 for smoothing
�k = 0, gij = fmean � simple averaging
�k = 1, gij = fij � no smoothing at all
�k = 2, gij = fij + (fij – fmean)
IIT Bombay Slide 32
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
19
Lee filter
IIT Bombay Slide 33
GNR607 GL 3 - 4 B. Krishna Mohan
a. Original image
b. Wallis filterc. K=2d. K=3e. K=0.5f. K=0
General form of Lee filter
• The general form of Lee filter is given by
• kij is given by
• Greater noise, smaller kij, hence more smoothing
( )ij mean ij ij meang f k f f= + −
2
2 2 2
ij
ij
mean v ij
kf
σ
σ σ=
+
IIT Bombay Slide 34
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
20
Comments on General form of Lee filter
• Noise variance has to be estimated from homogeneous areas
• Unless noise variance is very low, this filter smoothes the image like average filter
• Greater noise, smaller kij, hence more smoothing
2
2 2 2
ij
ij
mean v ij
kf
σ
σ σ=
+
IIT Bombay Slide 34a
GNR607 GL 3 - 4 B. Krishna Mohan
Gradient Inverse Filter
• The gradient inverse filter applies weights to the neighbors in an inverse proportion to their difference to the central pixel (i,j)’s gray level
• Let u(i,j,k,l)=
• Else, u(i,j,k,l) = 2.0
1, ( , ) ( , )
| ( , ) ( , ) |if f i k j l f i j
f i k j l f i j+ + ≠
+ + −
IIT Bombay Slide 35
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
21
Gradient Inverse Filter
• The gradient inverse filter is defined by
• hi,j,0,0 = p (=weight for centre pixel), p ≤1
• hi,j,k,l = (1-p)[ui,j,k,l / ] for other pixels∑ i,j,k,lk,l
u
IIT Bombay Slide 36
GNR607 GL 3 - 4 B. Krishna Mohan
, , , , , k w l w
i j i j k l i k j l
k w l w
g h f=+ =+
− −=− =−
= ∑ ∑
K-Nearest Neighbor algorithm• Find k-nearest neighbors – k neighbors whose
gray levels are closest to the central pixel in the neighborhood
• Sort the neighbors on the basis of similarity of gray level to the central pixel
• Compute the average of centre pixel and the k nearest neighbors
IIT Bombay Slide 37
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
22
Example
Consider the neighborhood
33 41 37
32 46 39
30 29 28
K = 4
Closest 4 gray levels to 46 are 41, 39, 37, 33
Including the central pixel, the average is
(1/5)(46 + 41 + 39 + 37 + 33) = 39.20 ~ 39
IIT Bombay Slide 38
GNR607 GL 3 - 4 B. Krishna Mohan
Non-linear filtering
• Nonlinear filters have certain advantages
over linear filters when dealing with noise
• Common examples are the rank order
filters
• A typical rank order filter is of the form
• gij = H[fi,j,k,l], where H represents a user-
specified rank criterion
IIT Bombay Slide 39
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
23
Rank filtering
• Modal filter
• Central pixel is assigned the gray level that occurs most frequently in the neighborhood
• gij = mode {fi-k,j-l | k,l=-w, …, o, …, w}
• e.g., fn = 11 12 14 15 12 16 11 15 15
• Modal filter output = 15
IIT Bombay Slide 40
GNR607 GL 3 - 4 B. Krishna Mohan
Median Filter
• Most common non-linear filter for image
smoothing
• Images corrupted by random salt-and-
pepper noise, are effectively smoothed,
without degrading the input image
• gij = median {fi-k,j-l | k,l=-w, …, o, …, w}
IIT Bombay Slide 41
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
24
Mean v/s Median filterExample
• 15 17 16 15 17 17
• 18 17 15 157 18 15
• 17 14 16 17 14 16
• Case 1 Case 2• Mean=16 Mean=32
• Median=16 Median=17
• In arithmetic averaging, noise is distributed over the neighbours; in median filtering, the extreme values are pushed to the extremes of the sequence
IIT Bombay Slide 42
GNR607 GL 3 - 4 B. Krishna Mohan
Algorithm• Consider the size of the window around the pixel
• Collect all the pixels in the window and sort them in ascending / descending order
• Select the gray level after sorting, according to the rank criterion
• It can easily be verified that median and mode filters are nonlinear, according to the definition of linearity
IIT Bombay Slide 43
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
25
Example
Median
filtering
Example here
is over 7x7
neighborhood
IIT Bombay Slide 44
GNR607 GL 3 - 4 B. Krishna Mohan
Trimmed Mean Filter
• Trimmed-Mean Operator:
• trimmed-mean: first k and last k gray levels not used
• trimmed-mean: equal weighted average of central N-2k elements
∑−
+=−=
kN
kn
nmeantrimmed xkN
z1
)(2
1
IIT Bombay Slide 45
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
26
Some Comments• Shift variant filters can adapt to the image
conditions better
• More computations are involved in shift variant filtering
• Gaussian smoothing has some optimal properties for which it is popular
• Degree of smoothing can be controlled by
varying the width σ of the Gaussian filter
IIT Bombay Slide 46
GNR607 GL 3 - 4 B. Krishna Mohan
Comments contd…• Simple averaging type filters fare poorly in
case of signal dependent noise
• Particularly with SAR images noise suppression is challenging
• Noise filtering is performed in case of SAR prior to image formation or after image formation
• Shift variant and nonlinear filters more successful with SAR images
IIT Bombay Slide 47
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
27
Comments contd…• An important requirement of image smoothing:
the sharpness in the image should be least affected
• Many comparative studies to evaluate methods
• Estimating noise statistics key to improving quality of data like SAR images
• Additional techniques – based on mathematical morphology
IIT Bombay Slide 48
GNR607 GL 3 - 4 B. Krishna Mohan
Edge Enhancement Methods
10/17/2013
28
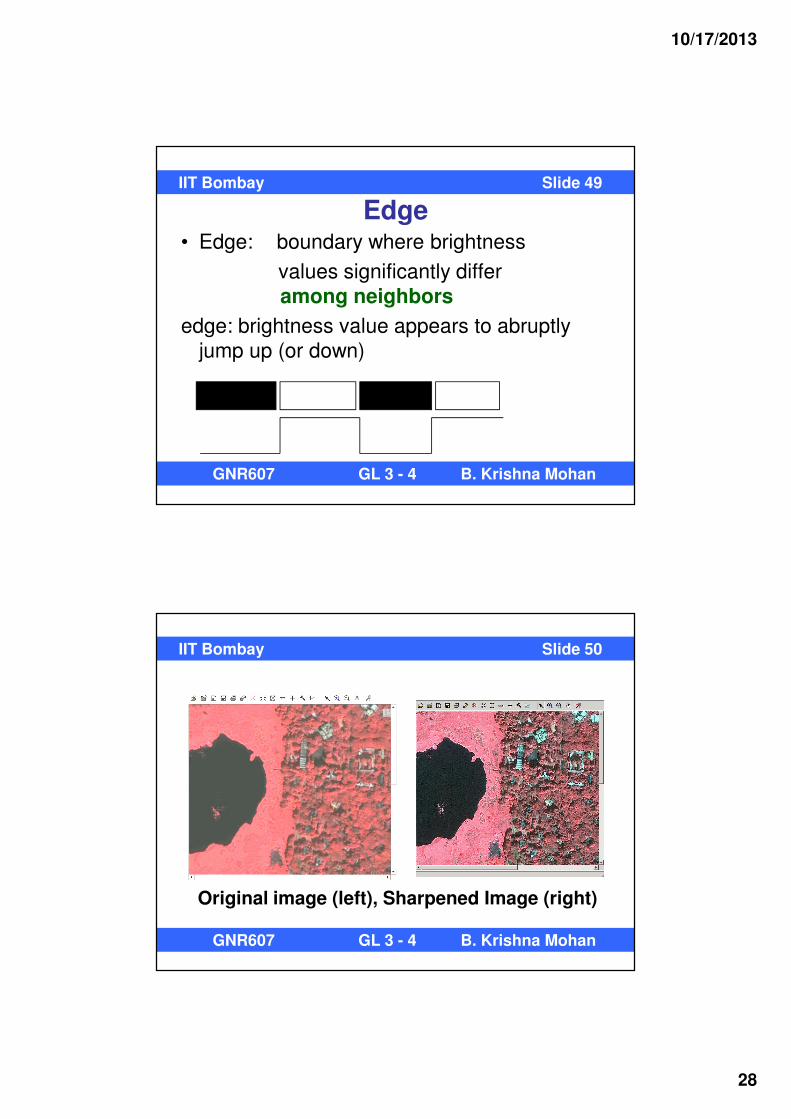
Edge• Edge: boundary where brightness
values significantly differ
among neighbors
edge: brightness value appears to abruptly
jump up (or down)
IIT Bombay Slide 49
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 50
GNR607 GL 3 - 4 B. Krishna Mohan
Original image (left), Sharpened Image (right)

10/17/2013
29
Edge Detection
Essential to mark the boundaries of objects
Area, shape, size, perimeter, etc. can be computed from clearly
identified object boundaries
Intensity / color / texture / surface orientation gradient
employed to detect edges
Gradient magnitude denotes the strength of edge
Gradient direction relates to direction of change of intensity /
color
IIT Bombay Slide 51
GNR607 GL 3 - 4 B. Krishna Mohan
How is an edge perceived?
• An edge is a set of connected pixels that lie
on the boundary between two regions
• The pixels on an edge are called edge
points
• Gray level / color / texture discontinuity
across an edge causes edge perception
• Position & orientation of edge are key
properties
IIT Bombay Slide 52
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
30
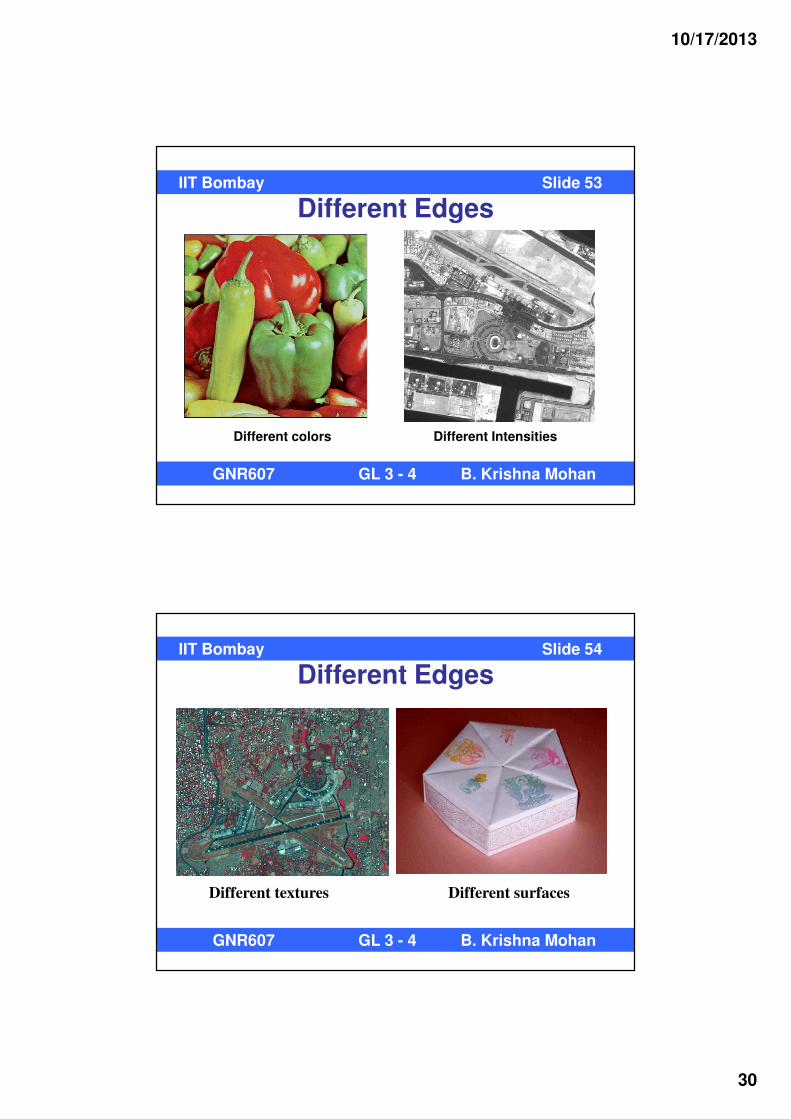
Different Edges
A
Different colors
Different brightness
IIT Bombay Slide 53
GNR607 GL 3 - 4 B. Krishna Mohan
Different Intensities
Different Edges
Different textures Different surfaces
IIT Bombay Slide 54
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
31
Types Of EdgesGray level profile derivatives
• Step edge:
• Ramp edge:
• Peak edge:
2nd
1st
1st
IIT Bombay Slide 55
GNR607 GL 3 - 4 B. Krishna Mohan
Locating an Edge
• Locating an edge is important, since the
shape of an object, its area, perimeter and
other such measurements are possible
only when the boundary is accurately
determined
• Edge is a local feature, marked by sharp
discontinuity in the image property on
either side of it
IIT Bombay Slide 56
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
32
Edge• Edge: boundary where brightness
values significantly differ
among neighbors
edge: brightness value appears to abruptly
jump up (or down)
IIT Bombay Slide 57
GNR607 GL 3 - 4 B. Krishna Mohan
Principle of Gradient Operator
The interpretation of this operator is that the
intensity gradient is computed in two
perpendicular directions, followed by the
resultant whose magnitude and orientation
are computed by treating the values from
the two masks as two projections of the
edge vector
IIT Bombay Slide 58
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
33
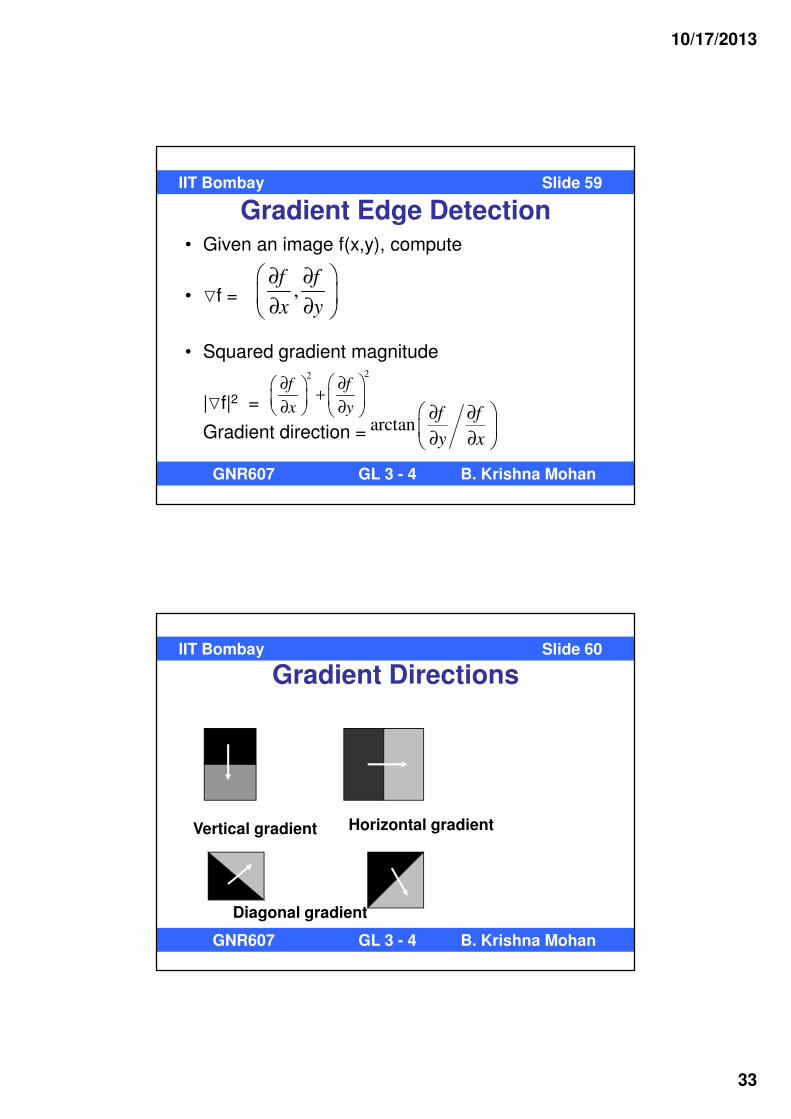
Gradient Edge Detection• Given an image f(x,y), compute
• �f =
• Squared gradient magnitude
|�f|2 =
Gradient direction =
,f f
x y
∂ ∂
∂ ∂
22f f
x y
∂ ∂ +
∂ ∂ arctan
f f
y x
∂ ∂
∂ ∂
IIT Bombay Slide 59
GNR607 GL 3 - 4 B. Krishna Mohan
Gradient Directions
Vertical gradient Horizontal gradient
Diagonal gradient
IIT Bombay Slide 60
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
34
Gradient Edge Detectors
• As seen, two mutually perpendicular gradient detectors are required to detect edges in an image, since edges may occur in any orientation.
• Using two mutually perpendicular orientations, an edge in any direction can be resolved in terms of these two orthogonal components
IIT Bombay Slide 61
GNR607 GL 3 - 4 B. Krishna Mohan
Roberts Operator• Roberts operator: two 2X2 masks to
calculate gradient; Operates on 2x size neighborhood
gradient magnitude: r1 = f(A) – f(D); r2 = f(B) – f(C) r1, r2 gradient outputs from the masks; direction = arctan(r2/r1)
2
2
2
1 rr +
1 0 0 1
0 -1 -1 0
A B
C D
IIT Bombay Slide 62
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
35
Gradient Edge Detectors• Prewitt Operator
• gradient magnitude:
• gradient direction: clockwise w.r.t. column axis
• p1, p2 are gradient outputs from the masks
2
2
2
1 ppg +=
)arctan( 21 pp=θ
1 1 1 -1 0 1
0 0 0 -1 0 1
-1 -1 -1 -1 0 1
Prewitt 1 Prewitt 2
IIT Bombay Slide 63
GNR607 GL 3 - 4 B. Krishna Mohan
Gradient Edge Detectors
• Prewitt Edge Detector (one part of it)
)()1()(' xfxfxf −+=
)1()()1(' −−=− xfxfxf+
x-1 x x+1
-1 0 1
-1 0 1
-1 0 1 = f (x+1) – f (x -1)
More stable than Roberts, robust to noise in the image, and produces better edges. More time consuming,
IIT Bombay Slide 64
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
36
Input image
IIT Bombay Slide 65
GNR607 GL 3 - 4 B. Krishna Mohan
Prewitt Operator Output
IIT Bombay Slide 66
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
37
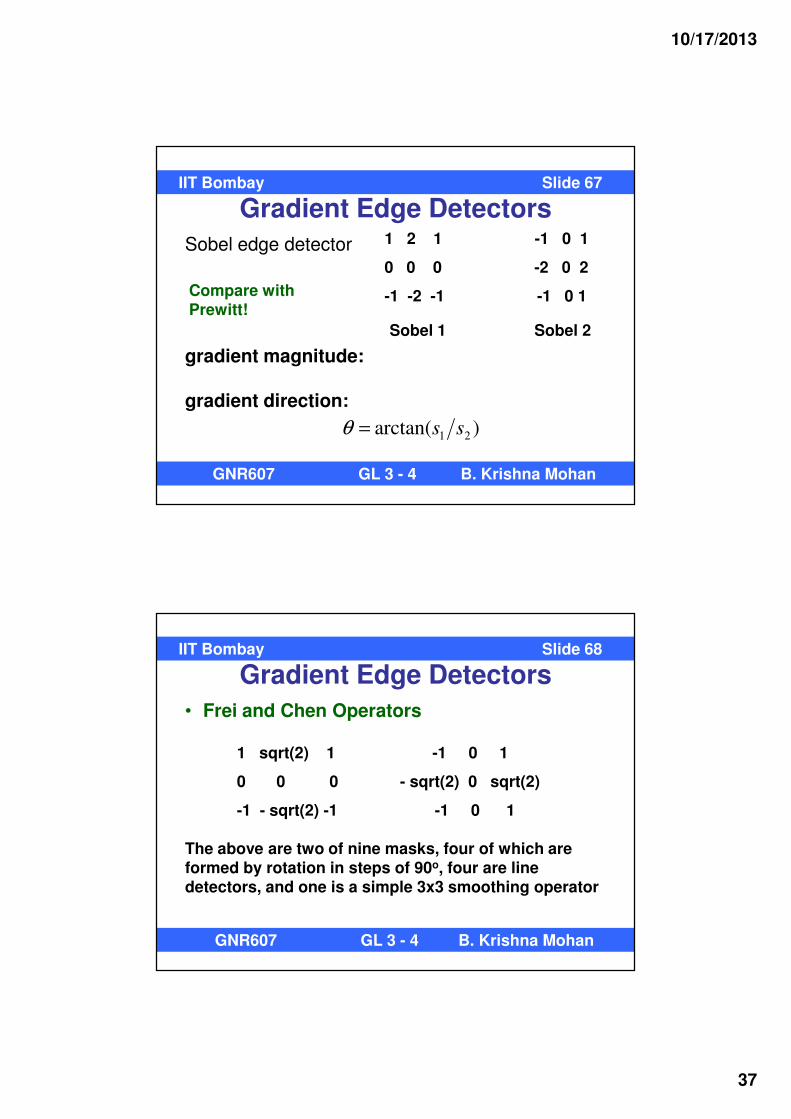
Gradient Edge Detectors
Sobel edge detector
)arctan( 21 ss=θ
gradient magnitude:
gradient direction:
1 2 1 -1 0 1
0 0 0 -2 0 2
-1 -2 -1 -1 0 1
Sobel 1 Sobel 2
Compare with Prewitt!
IIT Bombay Slide 67
GNR607 GL 3 - 4 B. Krishna Mohan
Gradient Edge Detectors
• Frei and Chen Operators
The above are two of nine masks, four of which are formed by rotation in steps of 90o, four are line detectors, and one is a simple 3x3 smoothing operator
1 sqrt(2) 1 -1 0 1
0 0 0 - sqrt(2) 0 sqrt(2)
-1 - sqrt(2) -1 -1 0 1
IIT Bombay Slide 68
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
38
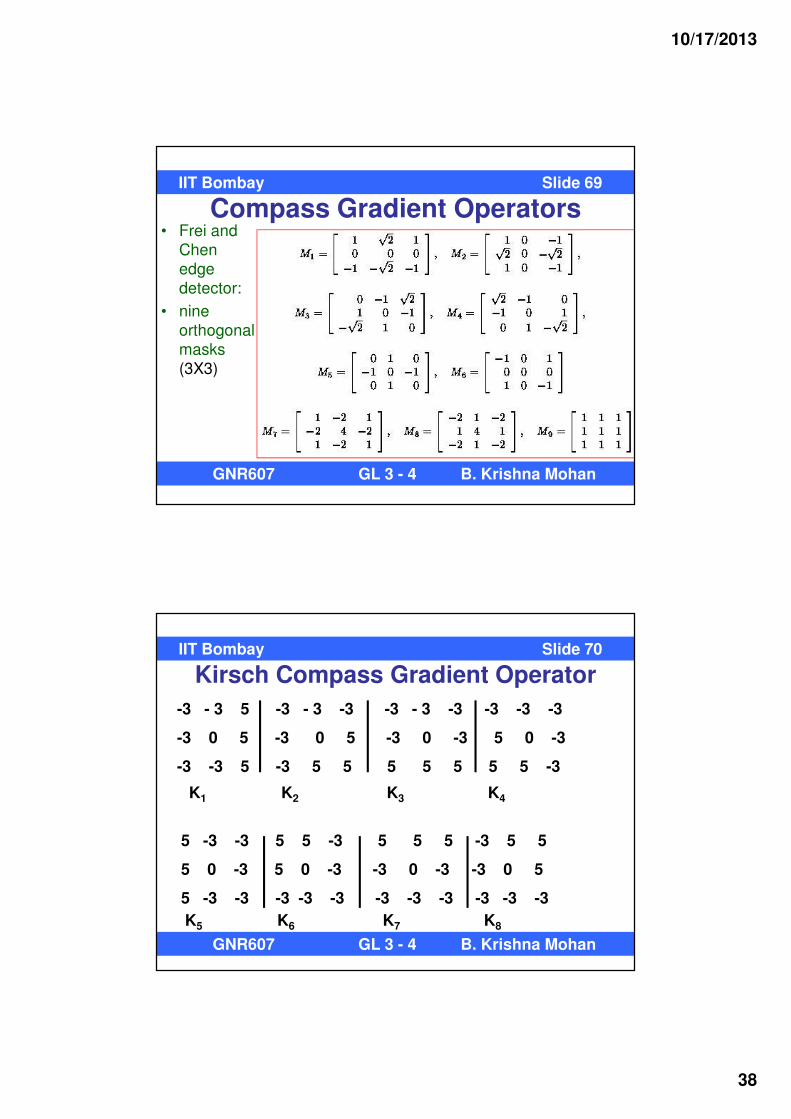
Compass Gradient Operators• Frei and
Chen
edge
detector:
• nine
orthogonal
masks
(3X3)
IIT Bombay Slide 69
GNR607 GL 3 - 4 B. Krishna Mohan
Kirsch Compass Gradient Operator
-3 - 3 5 -3 - 3 -3 -3 - 3 -3 -3 -3 -3
-3 0 5 -3 0 5 -3 0 -3 5 0 -3
-3 -3 5 -3 5 5 5 5 5 5 5 -3
K1 K2 K3 K4
5 -3 -3 5 5 -3 5 5 5 -3 5 5
5 0 -3 5 0 -3 -3 0 -3 -3 0 5
5 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3
K5 K6 K7 K8
IIT Bombay Slide 70
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
39
Kirsch Gradient Edge Detectors
• Kirsch: set of eight compass template edge masks
gradient magnitude:
gradient direction:
kmax , k = 1,2, ..., 9kg e=
45 arg max keθ = �
IIT Bombay Slide 71
GNR607 GL 3 - 4 B. Krishna Mohan
Robinson Gradient Detector
� Robinson: compass template mask set with only ∓0, ∓1, ∓2
Other four masks are mirror reflections of the first fourGradient magnitude and direction same as Kirsch
-1 0 1 -2 -1 0 -1 -2 -1 0 -1 -2
-2 0 2 -1 0 1 0 0 0 1 0 -1
-1 0 1 0 1 2 1 2 1 2 1 0
R1 R2 R3 R4
IIT Bombay Slide 72
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
40
Actual Edges
• The edge enhanced images are
thresholded in order to suppress the
interior portions of the image and retain
only the edges
• This helps in identifying the outlines of the
objects of interest
IIT Bombay Slide 73
GNR607 GL 3 - 4 B. Krishna Mohan
Prewitt operator output thresholded at 40
IIT Bombay Slide 74
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
41
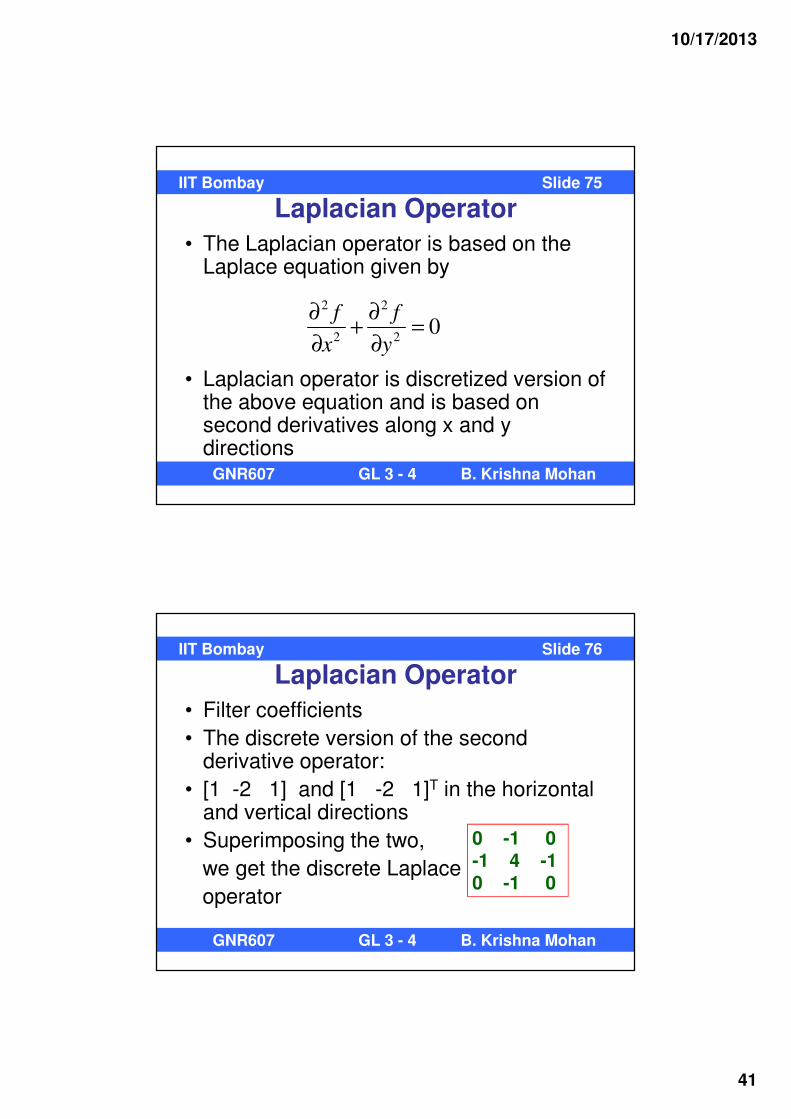
Laplacian Operator
• The Laplacian operator is based on the Laplace equation given by
• Laplacian operator is discretized version of the above equation and is based on second derivatives along x and y directions
2 2
2 20
f f
x y
∂ ∂+ =
∂ ∂
IIT Bombay Slide 75
GNR607 GL 3 - 4 B. Krishna Mohan
Laplacian Operator
• Filter coefficients
• The discrete version of the second derivative operator:
• [1 -2 1] and [1 -2 1]T in the horizontal and vertical directions
• Superimposing the two,
we get the discrete Laplace
operator
0 -1 0-1 4 -10 -1 0
IIT Bombay Slide 76
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
42
Properties of Laplace Operator
• Isotropic operator – cannot give orientation information
• Any noise in image gets amplified
• Faster since only one filter mask involved
• Smoothing the image first prior to Laplace operator is often needed for reliable edges
IIT Bombay Slide 77
GNR607 GL 3 - 4 B. Krishna Mohan
Zero-Crossing Edge Detectors• First derivative maximum: exactly where
second derivative zero crossing• In order to detect edges, we look at pixels
where the intensity gradient is high, or the first derivative magnitude is maximum
• First derivative maximum implies a zero when the second derivative is computed
• Edges are located at those positions where there is a positive value on one side and a negative value on the other side, in other words a zero-crossing
IIT Bombay Slide 78
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
43
A step edge, whose first derivative is an impulse, and whose second derivative shows a transition from a positive to a negative
Edge location corresponds to the point where a sign change occurs from positive to negative (or vice versa)
IIT Bombay Slide 79
GNR607 GL 3 - 4 B. Krishna Mohan
Zero-Crossing Edge Detectors
• Laplacian of a function I(r,c)
2
2
2
2
2
2
2
22 )(
c
I
r
II
crI
∂
∂+
∂
∂=
∂
∂+
∂
∂=∇
Two commonly used masks for Laplacian operator
IIT Bombay Slide 80
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
44
Zero Crossing Edge Detector
• Direct operation on the image using the
Laplacian operator results in a very noisy
result
• Derivative operator amplifies the high
frequency noise
• Preprocess the input image by a
smoothing operator prior to application of
the Laplacian
IIT Bombay Slide 81
GNR607 GL 3 - 4 B. Krishna Mohan
Zero Crossing Edge Detector
• The Gaussian shaped smoothing operator
is found to be ideal as a preprocessing
operator
• Therefore the Laplacian operator is
applied on Gaussian smoothed input
image
• ZC(image) = Laplacian [gaussian(image)]
IIT Bombay Slide 82
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
45
LOG operator
• Both Laplacian operator and Gaussian
operator are linear, and hence can be
combined into one Laplacian of Gaussian
(LoG) operator
• Laplacian[Gaussian(image)] =
[Laplacian(Gaussian)](image)
IIT Bombay Slide 83
GNR607 GL 3 - 4 B. Krishna Mohan
LOG operator• Laplacian[Gaussian(image)] =
[Laplacian(Gaussian)](image)
2 2
2
2 2
2
2 2
2
1 2( )2
4 2
1 2( )2
4 2
12 2 ( )2
4 2
1( , ) (1 )
2
1 [ (1 )]
2
1(2 )
2
r c
r c
r c
rLOG r c e
ce
r ce
σ
σ
σ
πσ σ
πσ σ
πσ σ
+−
+−
+−
= − − +
− −
+= − −
Verify!
IIT Bombay Slide 84
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
46
LOG operator
• LoG operator is a sampled version of the function
• For a given value of σ, the size of the Gaussian filter is -3σ to +3σ
• Computationally more expensive due to convolution with large filter masks
2 2
2
12 2 ( )2
4 2
1( , ) (2 )
2
r cr c
LOG r c e σ
πσ σ
+−+
= − −
IIT Bombay Slide 85
GNR607 GL 3 - 4 B. Krishna Mohan
Zero-Crossing Edge Detectors
Properties
• Edges depend on the value of σ• For small value of σ all edges are detected• For large value of σ only major edges are
detected• Any minor difference in intensity between
neighbors can be captured using LoG filter• Significant zero crossings can be identified using
suitable threshold
IIT Bombay Slide 86
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
47
Zero-Crossing Edge Detectors
• A pixel at (m,n) is declared to have a zero
crossing if
f’’(m,n) > T and f’’(m+δm, n+δn) < -T
OR
f’’(m,n) < -T and f’’(m+δm, n+δn) > T
IIT Bombay Slide 87
GNR607 GL 3 - 4 B. Krishna Mohan
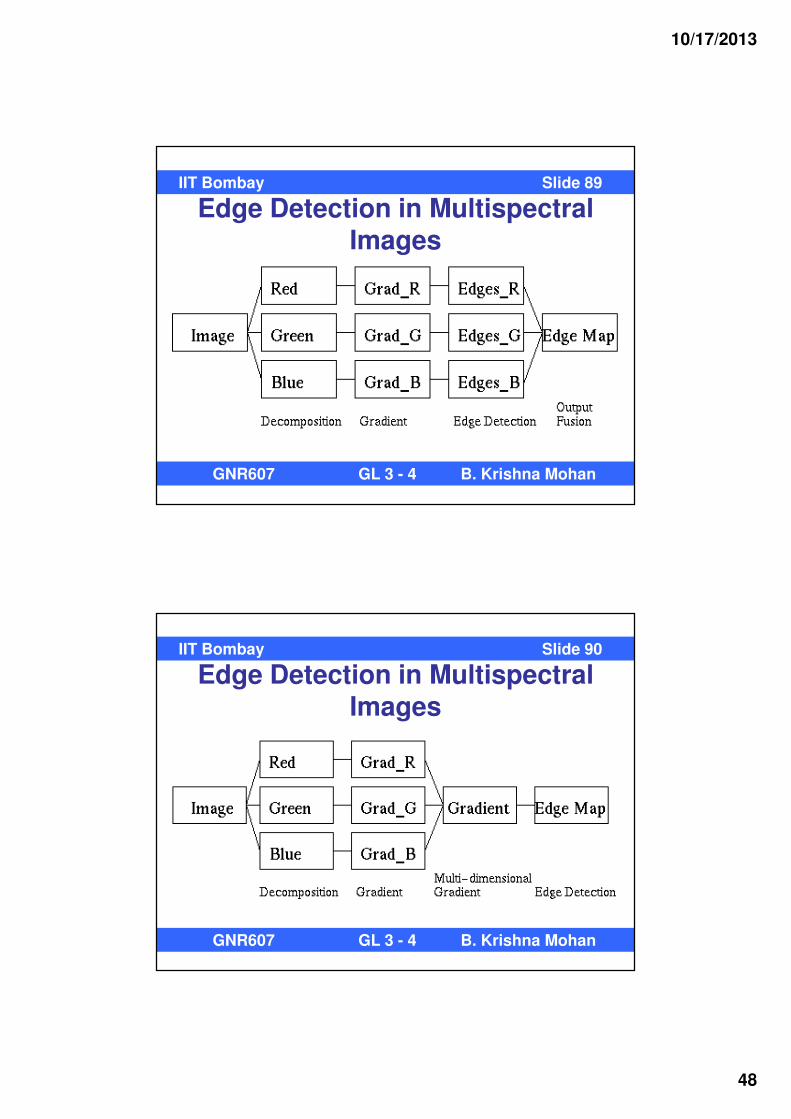
Edge Detection in Multispectral Images
• Simple approaches:
– Compute gradient by taking Euclidean distance
between multispectral vectors of data at adjacent
pixels instead of differences in gray levels
– Find independent gradients for different bands, edges
and combine edges
– Find independent gradients, combine gradients, and
find edge from multiband gradient
IIT Bombay Slide 88
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
48
Edge Detection in Multispectral Images
IIT Bombay Slide 89
GNR607 GL 3 - 4 B. Krishna Mohan
Edge Detection in Multispectral Images
IIT Bombay Slide 90
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
49
Image Sharpening
For example,
• Sharpened image =
Original image + k. gradient magnitude
• Scale factor k can determine whether
gradient magnitude is added as it is or a
fraction of it. The sum may be rescaled to
0-255 to display like an image
IIT Bombay Slide 92
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 93
GNR607 GL 3 - 4 B. Krishna Mohan
Original image (left), Sharpened Image (right)

10/17/2013
50
Unsharp Masking
• Sample convolution mask
0 0 0 0 0 0 1 1 1
0 1 0 + 0 1 0 - (1/9) 1 1 1
0 0 0 0 0 0 1 1 1
G = F + | (F – Fmean) |
IIT Bombay Slide 94
NR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 95
NR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
51
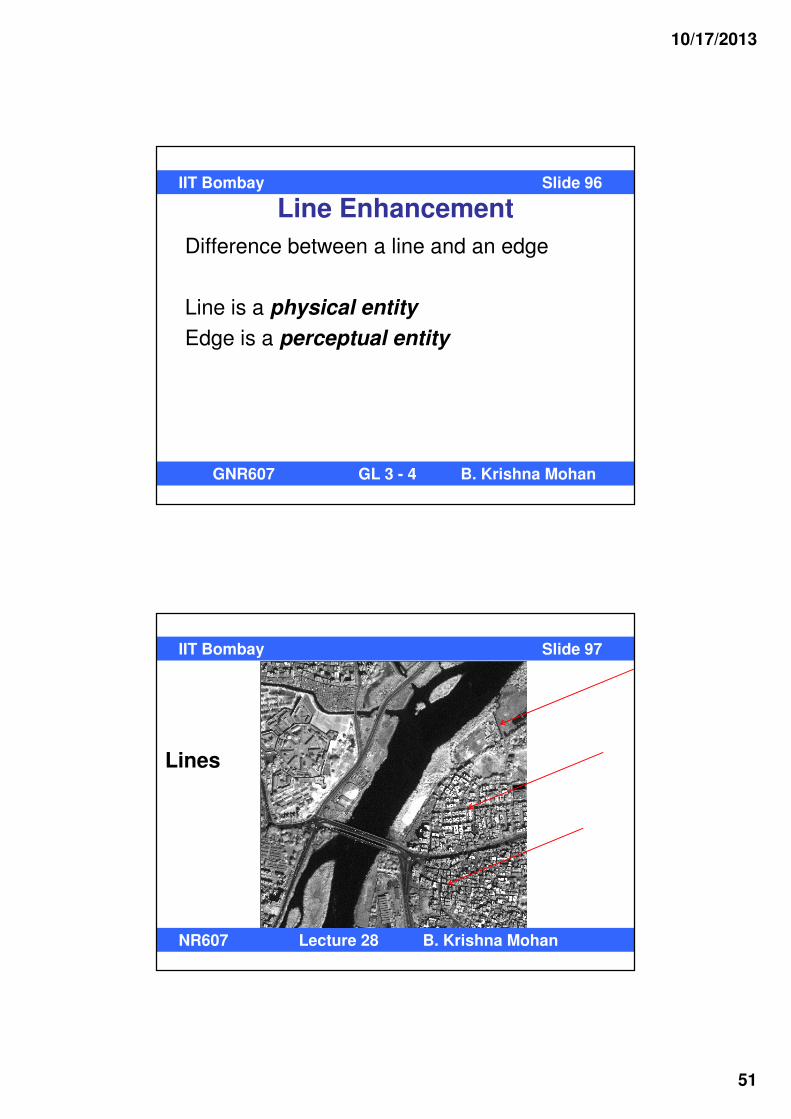
Line Enhancement
Difference between a line and an edge
Line is a physical entity
Edge is a perceptual entity
IIT Bombay Slide 96
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 97
NR607 Lecture 28 B. Krishna Mohan
Lines

10/17/2013
52
Line Enhancement
Detection of a physical line involves
High to low transition � Low to high transition
OR
Low to high transition � High to low transition
IIT Bombay Slide 98
GNR607 GL 3 - 4 B. Krishna Mohan
Line Enhancement Masks
• These masks look for positive to negative and negative to positive transitions in vertical/horizontal/diagonal directions
IIT Bombay Slide 99
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
53
Summary of Gradient Operators
• Edges or boundaries convey very
important information for image
understanding
• Gradient operators emphasize the local
intensity or other property differences
thereby making visible object boundaries
• Gradient operations in normal course are
only the first step in reliable edge
extraction
IIT Bombay Slide 100
GNR607 GL 3 - 4 B. Krishna Mohan
Summary of Neighborhood Operators
• Image processing operations involving
neighborhoods of pixels are important in
many tasks
• Smoothing filters are composed of non-
negative coefficients which add up to 1
• Gradient filters are composed of both
positive and negative coefficients which
must add up to 0 so that in images where
there is no edge, the output is zero.
IIT Bombay Slide 101
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
54
Shape Fitting by Hough Transform
IIT Bombay Slide 102
GNR607 GL 3 - 4 B. Krishna Mohan
Hough Transform• A method for finding global relationships
between pixels.
Example: We want to find straight lines in an image
• Apply Hough transform to the edge enhanced –thresholded image
• Any curve that can be represented by a parametric equation can be extracted by Hough transform
IIT Bombay Slide 103
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
55
Line Fitting
IIT Bombay Slide 104
GNR607 GL 3 - 4 B. Krishna Mohan
EdgesLines fit to the edges
Hough transform ProcedureConsider a set of points xi, yi on a line y = a.x + b; a and
b are parameters (slope and intercept)
All the above points satisfy the equation yi = a.xi + b
Let xi and yi be the parameters; then b = -a.xi + yi
Vary a and find corresponding b. In the “a-b” space, it is a line
For each xi, yi there is a line in the “a-b” space
IIT Bombay Slide 105
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
56
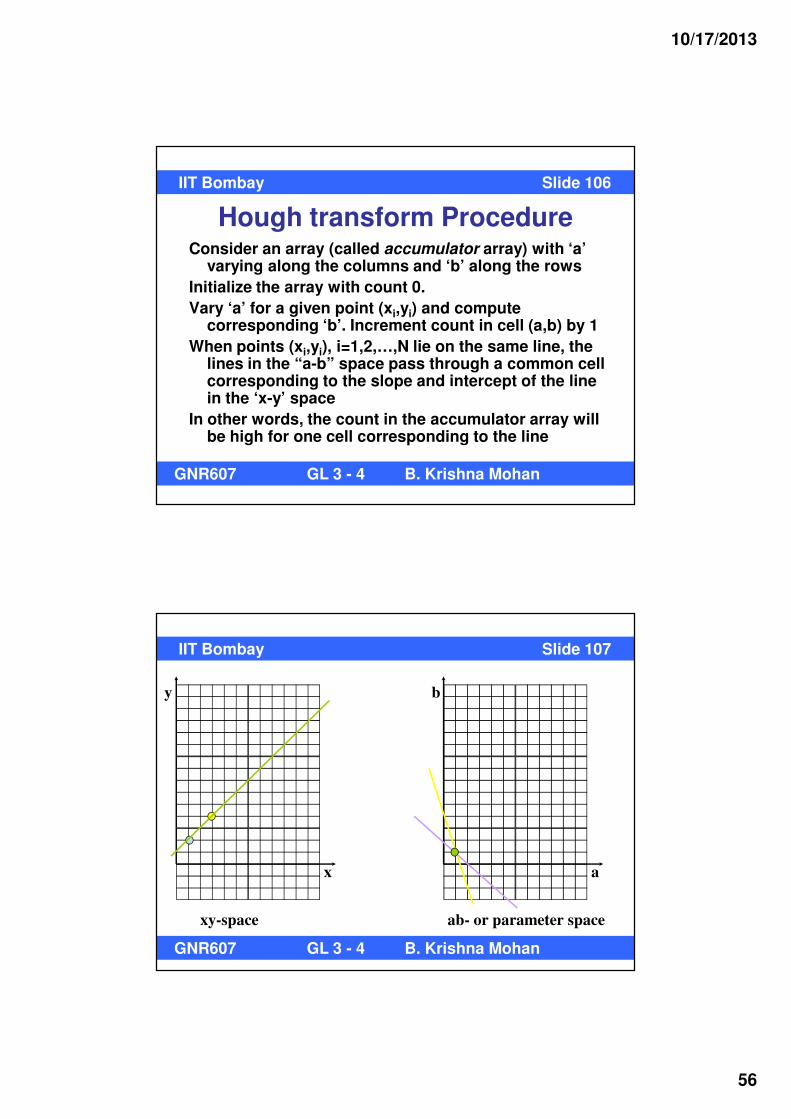
Hough transform ProcedureConsider an array (called accumulator array) with ‘a’
varying along the columns and ‘b’ along the rows
Initialize the array with count 0.
Vary ‘a’ for a given point (xi,yi) and compute corresponding ‘b’. Increment count in cell (a,b) by 1
When points (xi,yi), i=1,2,…,N lie on the same line, the lines in the “a-b” space pass through a common cell corresponding to the slope and intercept of the line in the ‘x-y’ space
In other words, the count in the accumulator array will be high for one cell corresponding to the line
IIT Bombay Slide 106
GNR607 GL 3 - 4 B. Krishna Mohan
y
xy-space
x
ab- or parameter space
b
a
IIT Bombay Slide 107
GNR607 GL 3 - 4 B. Krishna Mohan
10/17/2013
57
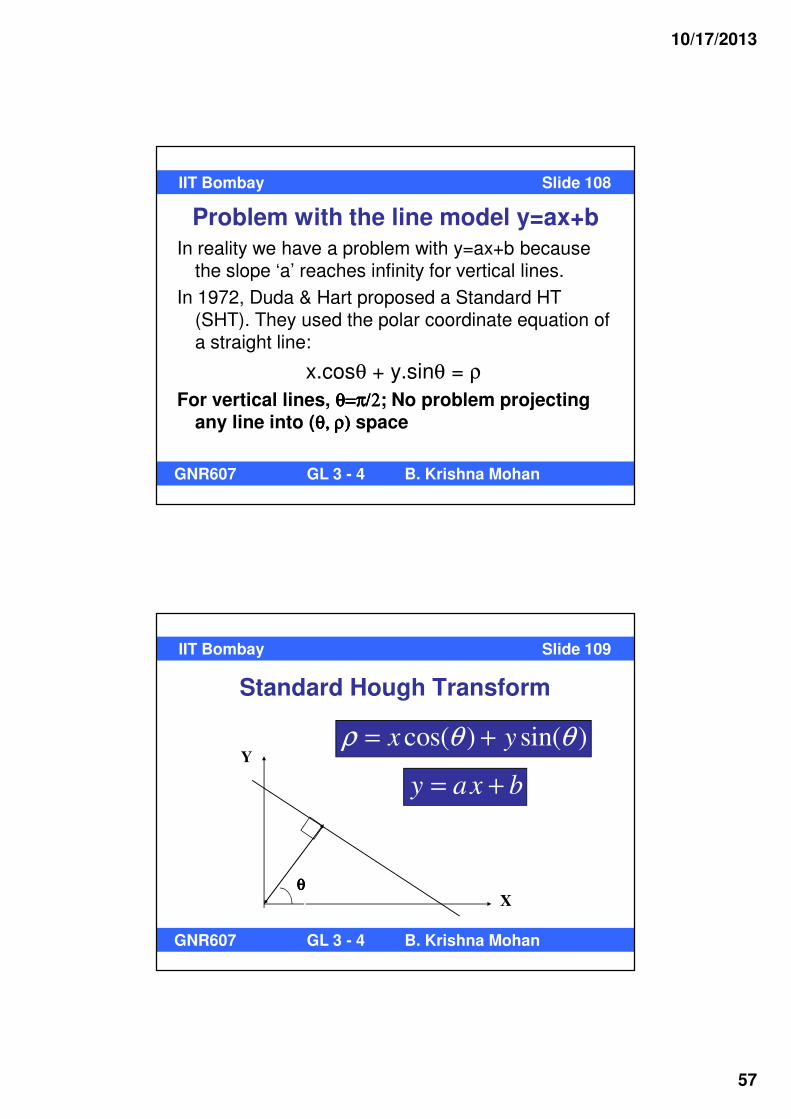
Problem with the line model y=ax+b
In reality we have a problem with y=ax+b because the slope ‘a’ reaches infinity for vertical lines.
In 1972, Duda & Hart proposed a Standard HT (SHT). They used the polar coordinate equation of a straight line:
x.cosθ + y.sinθ = ρ
For vertical lines, θ=π/2θ=π/2θ=π/2θ=π/2; No problem projecting any line into (θ, ρ)θ, ρ)θ, ρ)θ, ρ) space
IIT Bombay Slide 108
GNR607 GL 3 - 4 B. Krishna Mohan
Standard Hough Transform
cos( ) sin( )x yρ θ θ= +
X
Y
θθθθρ
θ
y ax b= +
IIT Bombay Slide 109
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
58
Accumulator Array CreationSelect the point (x,y) on a line
Create an array in which θθθθ varies along columns, from θ = 0 θ = 0 θ = 0 θ = 0 to θ = 2π θ = 2π θ = 2π θ = 2π in small increments (e.g., 15o)
For each θ,θ,θ,θ, find the value of ρρρρ. Increment the count in accumulator array for cell (θ,ρθ,ρθ,ρθ,ρ) by 1
For each point (x,y) there is a sinusoid in the (θ,ρθ,ρθ,ρθ,ρ) space.
All points (xi, yi) on a given line will have some (θ,ρθ,ρθ,ρθ,ρ) common
IIT Bombay Slide 110
GNR607 GL 3 - 4 B. Krishna Mohan
IIT Bombay Slide 111
GNR607 GL 3 - 4 B. Krishna Mohan
Original artwork from the book Digital Image Processing by R.C. Gonzalez and R.E. Woods © R.C. Gonzalez and R.E. Woods, reproduced with permission granted to instructors by authors on the website www.imageprocessingplace.com
Hough Space
10/17/2013
59
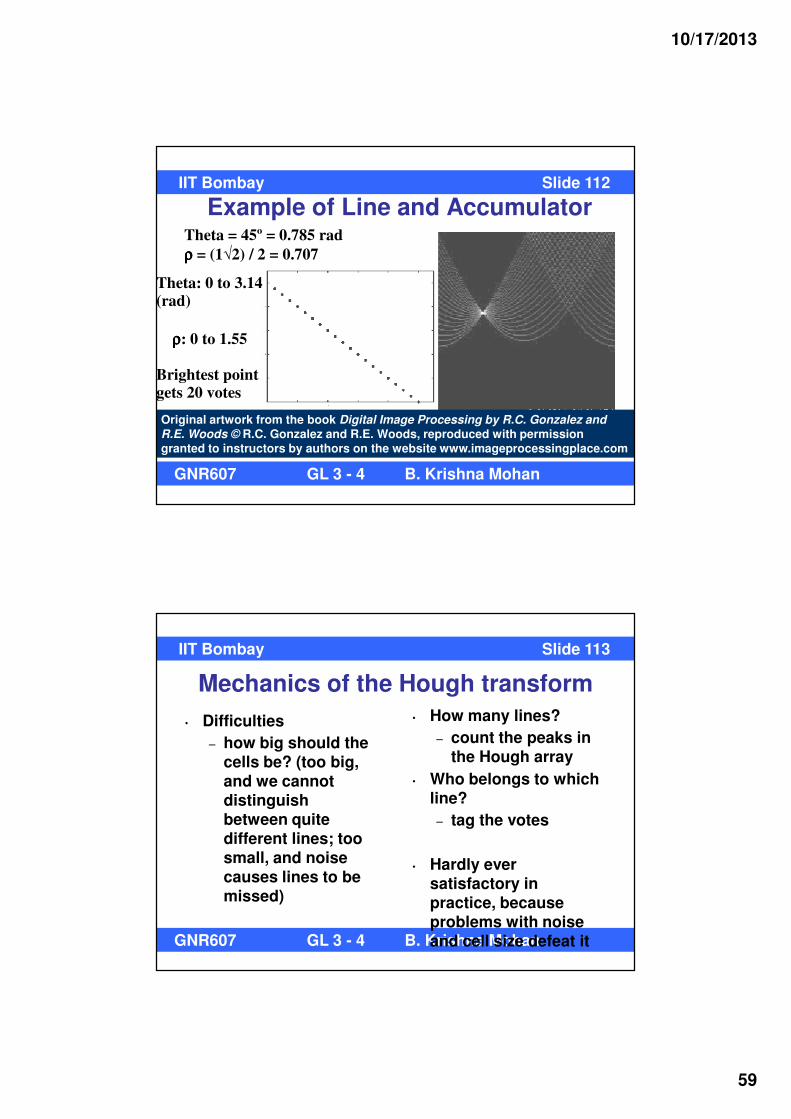
Example of Line and AccumulatorIIT Bombay Slide 112
GNR607 GL 3 - 4 B. Krishna Mohan
Theta = 45º = 0.785 rad
ρρρρ = (1√2) / 2 = 0.707
Theta: 0 to 3.14 (rad)
Brightest point gets 20 votes
ρρρρ: 0 to 1.55
Original artwork from the book Digital Image Processing by R.C. Gonzalez and R.E. Woods © R.C. Gonzalez and R.E. Woods, reproduced with permission granted to instructors by authors on the website www.imageprocessingplace.com
Mechanics of the Hough transform
IIT Bombay Slide 113
GNR607 GL 3 - 4 B. Krishna Mohan
• Difficulties
– how big should the cells be? (too big, and we cannot distinguish between quite different lines; too small, and noise causes lines to be missed)
• How many lines?
– count the peaks in the Hough array
• Who belongs to which line?
– tag the votes
• Hardly ever satisfactory in practice, because problems with noise and cell size defeat it

10/17/2013
60
IIT Bombay Slide 114
GNR607 GL 3 - 4 B. Krishna Mohan
Brightest point = 6 votes
Noisy Line
Original artwork from the book Digital Image Processing by R.C. Gonzalez and R.E. Woods © R.C. Gonzalez and R.E. Woods, reproduced with permission granted to instructors by authors on the website www.imageprocessingplace.com
Totally Chaotic!
IIT Bombay Slide 115
GNR607 GL 3 - 4 B. Krishna Mohan
Original artwork from the book Digital Image Processing by R.C. Gonzalez and R.E. Woods © R.C. Gonzalez and R.E. Woods, reproduced with permission granted to instructors by authors on the website www.imageprocessingplace.com
10/17/2013
61
Improvements to Simple Hough Transform
Noise tolerance: Most edge detectors give edge direction. Consider only those directions in accumulator array corresponding to edge direction at pixels
Speed up: A two-stage process can be considered. First, generate coarse (ρ,θ) array. Find approximate lines. Next, find precise values of (ρ,θ) by searching around the coarse values
IIT Bombay Slide 116
GNR607 GL 3 - 4 B. Krishna Mohan
High Order Parametric CurvesCircle: (x-a)2 + (y-b)2 = r2
Parameter space is 3-dimensionalHighly computation intensiveSearching for maxima in 3-D arrays is
computationally expensiveEfficient data structures are importantRef: A.M. Cross, Detection of circular
geological features using the Hough transform, International Journal of Remote Sensing, vol. 9, no. 9, pp. 1519-1528, 1988
IIT Bombay Slide 117
GNR607 GL 3 - 4 B. Krishna Mohan

10/17/2013
62
Cir
cle
Dete
cti
on
IIT Bombay Slide 118
GNR607 GL 3 - 4 B. Krishna Mohan
a
b
Contd…

















