Glaser, Sebastien In Sensing and Control. · OF TWO WHEELED VEHICLES The study of the two-wheeled...
7
This may be the author’s version of a work that was submitted/accepted for publication in the following source: Chenane, Chabane, Arioui, Hichem, Ichalal, Dalil, Mammar, Said, & Glaser, Sebastien (2014) Analysis of the leaning limit dynamics of Powered Two Wheeled vehicles. In Proceedings of the 11th IEEE International Conference on Networking, Sensing and Control. IEEE, United States of America, pp. 701-706. This file was downloaded from: https://eprints.qut.edu.au/120459/ c Consult author(s) regarding copyright matters This work is covered by copyright. Unless the document is being made available under a Creative Commons Licence, you must assume that re-use is limited to personal use and that permission from the copyright owner must be obtained for all other uses. If the docu- ment is available under a Creative Commons License (or other specified license) then refer to the Licence for details of permitted re-use. It is a condition of access that users recog- nise and abide by the legal requirements associated with these rights. If you believe that this work infringes copyright please provide details by email to [email protected] Notice: Please note that this document may not be the Version of Record (i.e. published version) of the work. Author manuscript versions (as Sub- mitted for peer review or as Accepted for publication after peer review) can be identified by an absence of publisher branding and/or typeset appear- ance. If there is any doubt, please refer to the published source. https://doi.org/10.1109/ICNSC.2014.6819711
Transcript of Glaser, Sebastien In Sensing and Control. · OF TWO WHEELED VEHICLES The study of the two-wheeled...

This may be the author’s version of a work that was submitted/acceptedfor publication in the following source:
Chenane, Chabane, Arioui, Hichem, Ichalal, Dalil, Mammar, Said, &Glaser, Sebastien(2014)Analysis of the leaning limit dynamics of Powered Two Wheeled vehicles.In Proceedings of the 11th IEEE International Conference on Networking,Sensing and Control.IEEE, United States of America, pp. 701-706.
This file was downloaded from: https://eprints.qut.edu.au/120459/
c© Consult author(s) regarding copyright matters
This work is covered by copyright. Unless the document is being made available under aCreative Commons Licence, you must assume that re-use is limited to personal use andthat permission from the copyright owner must be obtained for all other uses. If the docu-ment is available under a Creative Commons License (or other specified license) then referto the Licence for details of permitted re-use. It is a condition of access that users recog-nise and abide by the legal requirements associated with these rights. If you believe thatthis work infringes copyright please provide details by email to [email protected]
Notice: Please note that this document may not be the Version of Record(i.e. published version) of the work. Author manuscript versions (as Sub-mitted for peer review or as Accepted for publication after peer review) canbe identified by an absence of publisher branding and/or typeset appear-ance. If there is any doubt, please refer to the published source.
https://doi.org/10.1109/ICNSC.2014.6819711

Analysis of the leaning limit dynamics of Powered wo Wheeled vehicles
Chabane Chenane, Hichem Arioui, Dalil Ichalal, Said Mammar and Sebastien Glaser
Abstract- The preventive warning systems are seen as an alternative to rider assistance and risk reduction for Powered Two Wheeled (PTW) vehicles.
In this work we propose an analysis of the criti
cal lean dynamics of motorcycle based on a model of double inverted pendulum (DIP) . The choice of this structure is motivated by its simplicity and that the model contains the main parts which contribute principally in the PTW vehicle tilt dynamics.
The analysis will be focused on the effect of the tire-road adhesion, the longitudinal speed and its dynamics, the road curvature, the road bank angle and the tilt of the rider's upper body.
1. INTRODUCTION
Nowadays, the use PT\V vehicles i.e motorcycles and scooters, is more frequent than ten years ago because it has become not only a tool for entertainment but also a means of transportation and represents the benefits that are: easier to park, more flexible in traffic, etc. In France, road safety has been a sharp decline in the number of people killed on the roads, in the first six months of 20l3: - 15 % compared to the first half of 2012 [1]. Alas, for motorcycles, the decline is very low - 3.6 % and they constitute around 2.5 % of traffic and about 23 % of deaths. The same report indicates that bikers are still illequipped due to non-compliance of the equipment used or the negligence of the users. This kind of protection falls into the category of passive safety. Initiatives work to implement a passive system that improves vehicle performance at high frequencies has been done [7], [19].
Although there are systems such as ABS braking system (Anti-lock Braking System) and Dual CBS appeared in 1993, ASC (Anti-Slip Control), etc. The complexity of interaction between the main three components, Vehicle-Infrastructure-Rider (VIR), makes the implementation of these systems more difficult and sometimes as optional systems. Recently, studies are being conducted for the development of so-called semiactive, for steering control systems [13]. A preliminary study on the performance of an electronic stability system for PT\V vehicles has been proposed in [14], where they established a control architecture of an active system. Some control strategies have been validated on the BikeSim platform and this shows that the implementation of active systems on PT\V vehicles is of a very important challenge despite the difficulties that it represents [15].
978-1-4799-3106-4114/$31.00 ©2014 IEEE 701
An accident occurs either due to poor infrastructure, a wrong riding of third person or of rider involvement itself. In PT\V vehicles, most accidents in which the rider is the only responsible occur when cornering due to a loss of control over his vehicle. This usually occurs due to poor knowledge of place or excessive self-confidence, and these cases are due to excessive speed or inappropriate leaning movements. For this, the prevention of the rider so that it can correct its maneuvers in case of risk of accident, proves a very good alternative for security systems. Such a system can be developed as part of an automated driving, but it is more efficient to design it, above all in our case, as a driving aid [9]. Studies have been conducted for the development of this kind of system in the case of four-wheel vehicles [2] and recently for motorcycles [8].
Design assistance for the effective drive requires a good understanding of the dynamics of the triplet VIR and need the use of sensors and observers [3]' [4] toacquire useful information for the assessment of the risk and generate an alert for rider before a possible accident. For this, we will be interested simply in studying the behavior of the vehicle as a double inverted pendulum.
This paper is organized as follows: first, a nonlinear model of vehicle like two rigid bodies will be established assuming the system as a double inverted pendulum. Some necessary notions will be recalled about the Coulomb friction. Then we express the applied resolution method. Some tests will be done to assess and analyze the responses for different values of the adhesion, forward velocity, longitudinal acceleration/ deceleration, chest roll angle, curvature and road bank angle. Finally, the paper is wrap up by a conclusion and future work.
II. DOUBLE INVERTED PENDULUM MODELOF TWO WHEELED VEHICLES
The study of the two-wheeled vehicles dynamics dates back more than a decade and one of the first realistic results are those of Sharp's study in 1971 [21]. A good vehicle modeling depends on the number of degrees of freedom taken into account [20], [5], [16], but also the tire model used for [6]' [17]. Different modelingapproaches have been used in order to simplify the calculation of the equations dynamics [12], [10]. This approach of modeling take into account the whole VIR like a DIP [11]. It consists in calculating the kinetic T and potential V energies of each body relative to the

reference vehicle and calculate the dynamic equations using the Modified Lagrangian Formalism (1).
{.!i 8T _ ?j; 8T _ Q dt 8v" 8vy - x d 8T ni,8T Q lIt 8vy + 'f/ 8v" = y
.!i 8T + V 8T _ V 8T - Q dt 8;P X 8vy y 8v" - 1jJ d 8T 8T 8D, 8V _ Q lIt 8q.; - 8qi + 8q.; + 8q.; - i
(1)
\Vith : Qi are the generelazed moments and forces. qi are the ith generalized coordinates.i takes either the roll angle cP or the chest roll angle cPr.
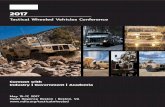
The two parts considered here are the main body of the motorcycle and the upper rider body (figure 1):
• Main body: consisting of the lower part of therider, both of the front and rear frames of thevehicle, without the possibility of rotation of thefront body relative to the rear one. The wheels areconsidered rigidly connected to the two previousbodies.
• Chest of the rider: it consists of the upper bodyof the rider, it has the possibility of rotation withrespect to the symmetric plane with an angle cPr.
M
(' :
--------�-----U Z Lr
Fig. 1. Geometrical representation of the PTW vehicle
The generalized efforts are assumed to be linear [16] including the transient behavior.The generalized forces and moments are given by:
1Qx = Fxf + Fxr Qy = Fyf + Fyr - (Mr + Mc)g sin ( cPd)Q1jJ = LfFyf - LrFyr + Mzf + MzrQq, = MXf + Mxr Q 10, = lvlrider
(2)
The simulations results of the non linear model are shown in the figure 2.
The scenario is done on a cornering maneuver for desired roll angle, applying a proportional controller which is function of speed, and constant forward speed Vx = 35 km/ h without active effect of the weight ofthe rider's upper body part (lvlrider = 0 Nm). Thecondition of side balance is well respected because both
702
20
15
10
5
5 10 t (8)
6
4
2
0 0 5 10 t (8)
-1
50 40
� 30 E ;: 20
10 0
0
0
5 10 t (8)
10 20 30 40 x(m)
Fig. 2. Simulation results of DIP motorcycle model
lateral and centrifugal forces coincide.
After obtaining the model equations, we make some operations that allow us to calculate the risk function related to the roll angle.
• \Ve assume that cPr and cPd are small angles.• ?j; = pvx . • The � expression in the lateral equation is replaced
by its equivalent expression deduced of the rollequation.
• � is replaced by its equivalent expression (3), deduced from the derivation of the roll equilibrium formula.
{ 4> = -( -Mrgh cos cp - (Mrh sin cp + (h' sin cp + PCPr cos cP )Mc)pv� +( -h' cos cP + PCPr sin cP )gMc) -1 (( - sin cpv� - 9 cos cP )pMc4>r
+(Mrh cos cP + (h' coscp - PCPr sin cp)Mc) (2vxpax + v�p)
With: h' = he + p.
To obtain the risk function expression, we need to write the lateral forces Fyf and Fyr on the basis of the othervariables as follows:
{ (4)
EQl and EQ2 are the lateral and yaw equationsrespectively.
Ill. COULOMB'S F RICTION
The stability of a vehicle depends essentially on a very important parameter JL which is the road adhesion. This factor is determined by the Coulomb friction law, which describes the behavior of the contact forces between two rigid bodies. This variable is very difficult to apprehended and depends on the road state, tire and weather conditions.
(3)

The relationship between the normal force and the tangential force at the contact point is given by the 2nd law of Coulomb friction, and defined as:
(5)
The tangential force is used to guide the vehicle, it is described by two components: the longitudinal force Fx and the lateral force Fy. Thus we can rewrite the relation(5) by (6) which designates equation of a disc.
F2 + F2 <lIp2 x y - r' Z (6)
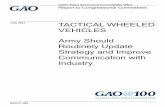
The tire design is characterized by a longitudinal contact force better than the side one [9]. Therefore, the shape of the previous relationship of the coupling strength, gives us a friction ellipse, as shown in Figure 3.
Preventive lateral assistance
Low warning Medium warning
- - - - Strong warning
Fig. 3. Friction ellipse and driver assistance zones
JLmob is the mobilized adhesion, defined by :
Ft JLmob = F s: JLmax
z
ASC
ft/dllg
(7)
To obtain the values of the roll angle limit cPmax that the rider should not exceed, we use the following expression of the maximal adhesion :
JLmax = max( J JLfatj + JLfongj' J JL2Zatr + JL2zongr) (8)
Expressions of lateral and longitudinal adhesions are calculated as follows:
Fyj JLzatj = Fzj
FyrJLzatr = Fzr
ax JLzongj = JLzongr = -9
(9)
(10)
Expressions of the load transfer are considered like:
703
{ F = M,+M.c (L 9 - ha )zj L[+L,. r x F = M.,+NI .. ,. , (L 9 + ha )zr Lf+L, j x
(11)
IV. EVA LUATION OF LIMIT ROLL ANG LE
Risk function expressions have been proposed related to the vehicle speed limit at the beginning of a turn [9]. In our work, we will focus on the leaning angle of the vehicle, which is an important dynamic and specific to PT\V vehciles, since this angle may reaches 450, and that its true quantification by the rider through the turn is difficult, because in this case, this dynamic is variable unlike the forward speed which is generally considered constant. Risk assessment is done before the actual entry into loss of control, and especially the system must provide information long enough in advance (figure 3), so that action can be taken in order to avoid dangerous situations. This require good information on the mapping of the road and a good prediction of the movement of the vehicle, knowing its position and its dynamic states.
To find the maximal roll angle cPmax that should notbe exceeded, we can distinguish between the maximum adherence in longitudinal and lateral sides. Then we used the following adhesion expression obtained from equation (8):
1 = max( 2 2 JLzatj + JLZongj
2 2 ' JLZatmax JLZongmax
2 + � Zongr )
JLzongmax (12)
First, we write the expressions of Fyj and Fyr depending on the other variables (vx, cPr, etc) using (4). Then,we suppose equations Eql and Eq2 as follow:
2 2 Eql = JLzatj + JLzongj
(13) 2 2 JLZatmax JLZongmax
JL2Zatr 2 Eq2 = + JL Zongr
(14) JLfatmax 2 JLZongmax
\Ve replace the expression of longitudinal and lateral adhesion of the front and rear tire, by their equivalent expression effort, which are lateral (4), longitudinal (10) and vertical forces (11).
\Ve solve numerically both Eql = 1 and Eq2 = 1 relative to cP. The equilibrium value of the roll anglecPequ is obtained by taking the minimum value of thetwo solutions of the two equations min(SoIEq" SoIEq2)'
In the following, we analyze the influence of change of some factors (adhesion, curvature, constant and variable forward speed, rider's upper body part roll angle, road bank angle), in the limit dynamic of the tilt angle, using the same scenario already simulated. we assume that:

/-Llatmax = /-Llongmax = /-Lmax·
A. Adhesion influence
Adhesion is a factor that is not easy to quantify. Generally, we assume that it is close to 1 when the contact between the tire and the road is very good, between 0.5 and 0.6 for a wet or damp floor, between 0.2 and 0.3 for slippery conditions and below this values for icy roadway.
Using the same scenario and inputs as for the previous simulation, we assume four possible cases: /-Lmax equal to0.8, 0.6, 0.4 and 0.2.
� =0.8 max 25,--------------, 20 15 10 5 o
o
)lmax =0.4 o
� =0.6 max
5 )lmax =0.2
10 25,--------------, 15,--------------, 20 15105
o L-____________ � o 5 10
t (s)
10 5 o
o 5t (s)
Fig. 4. CPmax variation for different adhesion values
10
The results (figure 4) show that the value of the roll angle limit that should not be exceed narrows considerably with decreasing of the state of the pavement or driving conditions, which is totally obvious.
B. Forward speed influence
Forward speed is very significant for the stability of a PTW vehicles on a curve. Adding their tilt ability, the two dynamics influence one another and allow a number of ways to imagine corner turning. In this second test, we consider the same curvature (same path) as previously which fixes some constraints in terms of tilt angle.
The figure 5 shows the different shape of the limit roll angle for three cases of speed, varying between 30 and 50 km/ h for adhesion (/-Lmax = 0.4) . It is clearthat when the tilt range is large enough, this allow win in force to counter the effect of centrifugal force. But depending of the curvature value, this limit decreases as the centrifugal force increases with the longitudinal velocity because the risk increases also.
704
Vx = 30 km/h Vx = 40 km/h 2520 1510 5 0
0 5 10 0 5 10 t (s) t (s)
v = 50 km/h x 2520 -- �equ(o) 15 -- �max 10 _ . _ . �min 5
0 0 5 10
t (s)
Fig. 5. <Pmax variation for different forward speed values
C. Influence of curvature
The curvature of the road designate the change in its side geometry. There is three types of roads: the straight line (p = 0) , circle (p = cst) and clothoid. The latterallows the connection between the two others, respecting the conditions of dynamic comfort, warping of the floor and optical comfort. Hence the importance of this parameter on the PTW vehicles dynamics, whether for good view of the road or the right trajectory prediction by the rider, because the vehicle tilt angle can be very large, and a poor estimation of leaning angle can causes exit of the road to the inside or the outside of the turn. During this test, we consider three different forms of curvature at a constant forward speed (vx = 30 km / h) for adhesion (/-Lmax = 0.4).
20 tf;;:;;;;;��1 10 o
o --<Pmax <Pmin
10
��L! \J 0 5
20� �:: 1�bL -o 5
t (s)
10
01 1 0 0: r
0
01 1 0 0:
0
p (m-1)
�l 5 10
5 10
Fig. 6. CPmax variation for different allure of the road curvature
The figure 6 shows that, more you try to bend over to take a smaller radius of the corner, greater increases the

risk of losing control. For this reason, the roll angle limit that should not be exceed decreases.
D. Longitudinal acceleration/deceleration influence
A good hold of road in turn with motorcycle, is characterized by deceleration at the beginning of the curve and acceleration at its end. Generally we consider a constant speed throughout the turn, but practically it is very difficult to achieve since there are always small variations due to the lack of experience of the rider, or sudden changes when an obstacle raised. The analysis of the limit angle function (cf, figure 7), gives us insight into the influence of small variations of acceleration in curve for the same curvature and adhesion (fLmax = 0.3).
25,--------------, 20 15 10
5 o
o - - �min 10
25,--------------, 20 15 10
5 o
o 5 10 t (5)
v, (km/h) 31,--------------,
30 r-------------�
29
28L-------�----� o 5 10
v, (km/h) 38,--------------, 36 34 32
5 10 t (5)
Fig. 7. <Prnax variation for different allure of longitudinal speed
It is clear that the impact of the forward speed change, on the limit roll angle to respect, is very minimal compared to the impact of the velocity value at the same time.
E. Influence of the chest rider lean angle
The influence of the driver is of great importance to PT\V vehicles, since the ratio of masses (vehicle/rider) is about 30 to 50%. The tilt and lateral displacement of the chest during maneuvers in curves to move the center of gravity of the global system and successfully negotiate a turn, is regarded as a secondary input to the vehicle control [21]. For this, we tested the response of the roll angle limit for two different values of the rider's upper body leaning angle, in the same direction as the vehicle tilt angle. The adhesion fLmax is taken equal to0.3.
The results (cf, figure 8) reflect the expected objective, since the value of rPequ decreases with increasing of thetilt of the rider's chest angle, for the same speed and the same trajectory. Although the difference is not seen much because of the considered scenario and parameters.
705
�, (") 20 2 15 1.5 10
5 0.5 0
0 5 10
�, (") 20 10 15 10 5
5 0
0 5 10 5 10 t (5) t (5)
Fig. 8. <Prnax variation for different allure of rider's upper bodylean angle
F. Influence of the road bank angle
The road bank angle is designed by the manufacturers for the discharge of rainwater when the road slope is zero, and mainly to decrease the biasing of the tire side by taking a portion of the lateral acceleration, thereby facilitating drainage and improve the adhesion in lateral vehicle. One of the works that have studied the influence of the road bank on the PTW vehicles dynamics is [18] and the results shown that this angle is detrimental for their stability. The figure 9 shows the impact of the road bank angle on the limit value of the roll, where this latter decreases if the road is more tilted. This is completely logic, since there is no need to bow much if the bank angle is very greater. Otherwise it increases the risk of falling.
�dn 2
1.5
0.5
5 10
�dn 6 20
15 4 10
5 2
0 0 5 10 5 10
t (5) t (5)
Fig. 9. <Prnax variation for different allure of road bank angle

V. CONCLUSION
A model of a two rigid bodies for PTW vehicles was proposed. The idea is to assume all (Vehicle-Rider) as a double inverted pendulum with 5 degrees of freedom: longitudinal and lateral translations, three rotations which are yaw, vehicle roll dynamics and rider's chest tilt dynamics. The condition of lateral balance is respected. This proves the effectiveness of the nonlinear model. The reduction of the model was necessary to calculate the roll risk function, assuming some simplifying assumptions.
The tests done on the risk function gives satisfaction and quite acceptable results. The dynamics of PT\V vehicles in corner is very complex and difficult to manage. However taking some cases, allowed us to analyze the effect of several parameters about the vehicle tilt, whatsoever: curvature, longitudinal velocity and acceleration, the leaning of the rider's chest, the road bank angle and the adhesion which is very decisive for the system stability.
Further tests will be subject to future works, to better quantify the risk related to the lateral vehicle dynamics. The risk function depends on several variables, measured and unmeasured one. This part will be discussed in the next works, to remedy and observe the unmeasured variables (cPn p, cPd). Validation tests will be also considered.
VI. NOMENCLATURE
• x and y (m): Longitudinal and Lateral displacement• Vx and Vy (m / s ) : Longitudinal and Lateral velocity• 1jJ and cP (rad): Yaw and roll angle• lvIr and lvIe (kg): Masses of main frame and rider's
upper body• cPr (rad): Roll angle of the rider's upper body• cPd (rad): Road bank angle• L! (m): The distance between the center of gravity
and the front tire-road contact point.• Lr (m): The distance between the center of gravity
and the rear tire-road contact point.• h (m): Height of the center gravity of the main body• he (m): The distance between the seat and road• p (m): The distance between the seat and center of
gravity of the rider's chest• lvIrider (Nm): The torque due to the weight of the
chest of the rider• lrx and lex (kgm2): Main body NIr and chest of
the rider lvIe inertia with respect to the x axisrespectively
• lrz and lez (kgm2): Main body lvIr and chest ofthe rider NIe inertia with respect to the z axisrespectively
• lvIx! and lvIxr (Nm): Overturning moment of thefront and rear wheel
• lvIz! and lvIzr (Nm): Aligning moment of the frontand rear wheel
706
REFERENCES
[1] http://sosconso.blog.lemonde.fr/2013/07 /l1/des-motardsmenaces-et-pas-toujours-bien-equipes /.
[2] S. Glaser C. Sentouh and S.Mammar. Advanced vehicle infrastructure driver speed profile for road departure accident prevention. Vehicle System Dynamics, pages 612-623, 2006.
[3] C. Chenane, D. Ichalal, H. Arioui, and S. Mammar. Lateral dynamics reconstruction for sharp'71 motorcycle model with p2i observer. In 2nd International Conference on Systems and Control, 2012, pages 1-6, Marrakech, Maroc, 2012.
[4] C. Chenane, D. Ichalal, H. Arioui, and S. Mammar. Proportional Two Integral (P2I) Observer Synthesis for Single Track Vehicle. In 20th Mediterranean Conference on Control and Automation, MED 2012, pages 1-6, Barcelone, Espagne, July 2012.
[5] V. Cossalter and R. Lot. A motorcycle multi-body model for real time simulations based on the natural coordinates approach. Vehicle System Dynamics, 37(6):423-447, 2002.
[6] H.B. Pacejka et R.S. Sharp. Shear force development by pneumatic tyres in steady state conditions : A review of modelling aspects. Vehicle System Dynamics, 1991.
[7] S. Evangelou, D.J.N. Limebeer, R.S. Sharp, and M.C. Smith. Control of motorcycle steering instabilities. Control Systems Magazine, IEEE, 26(5):78-88, October 2006.
[8] M. Da Lio R. Lot R. Sartori A. Borin G. Rizzi F. Biral, E. Bertolazzi. Intelligent curve warning function in an advance rider assistance system for powered two wheel vehicles. in World Automotive Congress, Hungary: GTE, 2010, p. [1-11,}. Proceedings of: FISITA2010 , Budapest, 30th May(j4th June 2010.
[9] S. Glaser. Modelisation et analyse d'un vehicule en trajectoire limites Application au developpement de systf;mes d'aide a la conduite. PhD thesis, Universite d'Evry Val d'Essonne, 2004.
[10] A.M. Recuero J.L. Escalona. A bicycle model for education in machine dynamics and real-time interactive simulation. Bicycle and Motorcycle Dynamics 2010, Symposium on the Dynamics and Control of Single Track Vehicles, The Netherlands.
[11] C. Koenen. The dynamic behaviour of a motorcycle when running straight ahead and when cornering. PhD thesis, Mechanical, Maritime and Materials Engineering, December 1983.
[12] R. Lot and M. Da Lio. A symbolic approach for automatic generation of the equations of motion of multibody systems. MULTIBODY DYNAMICS 2003, 2003.
[13] S. M. Savaresi P. D. Filippi. A mixed frequency/time-domain method to evaluate the performance of semi-active steering damper control strategies during challenging maneuvers. ASME 2011, Dynamic Systems and Control Conference.
[14] S. M. Savaresi M. Corno P. De Filippi, M. Tanelli. Towards electronic stability control for two-wheeled vehicles: A preliminary study. ASME 2010 Dynamic Systems and Control Conference.
[15] K. Schr6ter P. Seiniger and J. Gail. Perspectives for motorcycle stability control systems. Accident Analysis Prevention, 44:74 - 81, 2012. Safety and Mobility of Vulnerable Road U sears: Pedestrians, Bicyclists, and Motorcyclists.
[16] H.B. Pacejka. Tire and vehicle dynamics. SAE-R. Society of Automotive Engineers, SAE International, 2006.
[17] G. Perantoni and D. J. N. Limebeer. A dynamic motorcycle tyre model based on lugre friction. The 11th International Symposium on Advanced Vehicle Control, 2013.
[18] D. J. N. Limebeer S. Evangelou and M. T. Rodriguez. Influence of road camber on motorcycle stability. Journal of Applied Mechanics, 75(6):231-236, 2008.
[19] R. S. Sharp S. Evangelou, D. J. N. Limebeer and M. C. Smith. Mechanical steering compensators for high-performance motorcycles. Journal of Applied Mechanics, 74(2):332-346, 2007.
[20] R. S. Sharp. Vibrational modes of motorcycles and their design parameter sensitivities. In Proc. Int Conf. Vehicle NVH Refinement, pages 3 - 5, Birmingham, May 1994.
[21] R.S. Sharp. A motorcycle model for stability and control analysis. Multibody System Dynamics: 123-142, 2001.