![HEINZMANN Electric Drives [Catalogue]](https://static.fdocuments.in/doc/165x107/568c34371a28ab02358f9e80/heinzmann-electric-drives-catalogue.jpg)
Getting the Most From Your Motors Kurt Heinzmann DEKA Research & Development Corp. January 2006.
56
Getting the Most From Your Motors Kurt Heinzmann DEKA Research & Development Corp. January 2006
-
Upload
ada-douglas -
Category
Documents
-
view
244 -
download
0
Transcript of Getting the Most From Your Motors Kurt Heinzmann DEKA Research & Development Corp. January 2006.
Getting the Most From Your Motors
Kurt HeinzmannDEKA Research & Development Corp.
January 2006

Getting the Most From Your Motors
General Topics
• Manufacturers' torque curves and specification sheets• How to manage power loss and temperature rise• Gear ratio • Review of motors from a previous Kit of Parts • Which motor for which application on a robot?• Batteries

Introduction• Assumptions and approximations• Power• Power loss in the mechanism• Power required at the motor• Power loss in the motor

Assumptions and Approximations
• Steady operation– We will not discuss acceleration requirements
• Linear systems– We will represent nonlinear phenomena as linear
• Simple motor analysis– Study only two power loss parameters
• Loss due to electrical resistance• Loss due to friction and damping, combined in one fixed
value

Example: Simplify. Assume fixed free current(combine the effects of friction and damping)
Fisher-Price motor in 2005 Kit of Parts
y = 0.11x + 0.53
0.0
0.5
1.0
1.5
2.0
2.5
3.0
0 2 4 6 8 10 12 14
Voltage, V
Ifree
, A
Current
Linear (Current)Free current
per data sheet

Power• Power is a measure of how fast work gets done.• POWER = EFFORT x FLOW
“EFFORT”– force– torque– pressure– voltage– thinking
“FLOW”–travel speed–rotating speed–flow of fluid–flow of electrons–doing

Power Loss in the Mechanism
• Some power from the motor is lost due to friction in the mechanism– Gears, belts, cables– Bearings, guides– Tires, balls, or other deformable items– Damage– Contamination
• Power loss is heat

Power required at the motor• Power at the motor = power required at the point of use +
power lost in the mechanism• Power loss is heat

Power loss in the motor• Power is lost in the motor due to friction,
damping, and electrical resistance• Power loss is heat
Analysis
• Basic motor theory• Important motor parameters• Power loss in the motor• Power loss in other electrical components• Gear ratios• Comparison• Batteries

Basic Motor Theory
• Torque is rotating EFFORT, speed is rotating motion (“FLOW”)– Torque = force x radius
• Voltage is electrical EFFORT, current is FLOW of electrons
• Power = EFFORT x FLOW– Mechanical power P(out) = torque x speed– Electrical power P(in) = voltage x current
• Shaft power = power in – power loss– Power loss is sum of electrical loss and mechanical loss

Basic Motor Theory
Important motor parameters
• Stall torque ( stall )
• Stall current ( istall )
• Free speed ( free )
• Free current ( ifree )

Basic Motor TheoryImportant motor parameters
•Torque loss (loss)– We will derive this from free current– Unit: newtons (N)
• Resistance (R)– Ohm’s law
– Unit: ohm ()
• Torque constant ( Kt )–Torque is proportional to current
– Units: (Nm/A)ampere
newton-metres
volts _ radian/second
• Voltage constant ( Ke ) –Motor internal voltage is proportional to speed– Units: V/(rad/s)

Units, ConversionsInternational System (SI) of units
Item
Symbol used here Comment SI unit
Abbrev-iation
Alternate unit Conversion
Force Mechanical effort newton N lb. 4.45 N = 1lb.Distance Mechanical displacement metre m In. 0.0254 m = 1 in.Speed Travelling speed metre/second m/s mph 0.45 m/s = 1 mph
Torque Turning effort newton metre Nm lb-inAngle Angular displacement radian rad degree 2 rad = 360°
Speed Rotating speed radian/second rad/s rpm 0.105 rad/s = 1 rpmTime Don’t have much second s min., h 3600 s = 1 h
Voltage V Electrical effort volt V
Current i Electrical flow ampere APower P Rate of work watt W hp 746 W = 1 hp
Resistance R Cause of power loss as heat ohm Energy Work joule (Nm) J ft-lb
Pressure Fluid effort pascal (N/m2) Pa psi 6900 Pa = 1 psi
Flow Fluid flow (at stated pressure) cubic metre/s m3/s CFM 0.00047 m3/s = 1 CFM
Prefixes: m = milli- = one thousandth (mm, mNm) k = kilo- = one thousand (km, kW)

Why use SI units?
• Easier than U.S. Customary units• A motor converts electrical power to mechanical
power.– If you express electrical power and mechanical power in
watts, you know what’s happening at both ends of the motor, and inside it.
– Would you like to convert volts-times-amperes to horsepower?
• Advice: Convert to SI units before doing any other calculation.
• Consolation: you can always convert back.

Basic Motor Theory

Direct Current (DC), Permanent-Magnet
(PM), Brush-Commutated Motor

Basic Motor Theory

Given these four parameters:
stall, istall, free, ifree and V,
Find these four parameters:
Kt, Ke, loss(free), and R.
Important motor parameters

Find torque constant Kt and voltage constant Ke
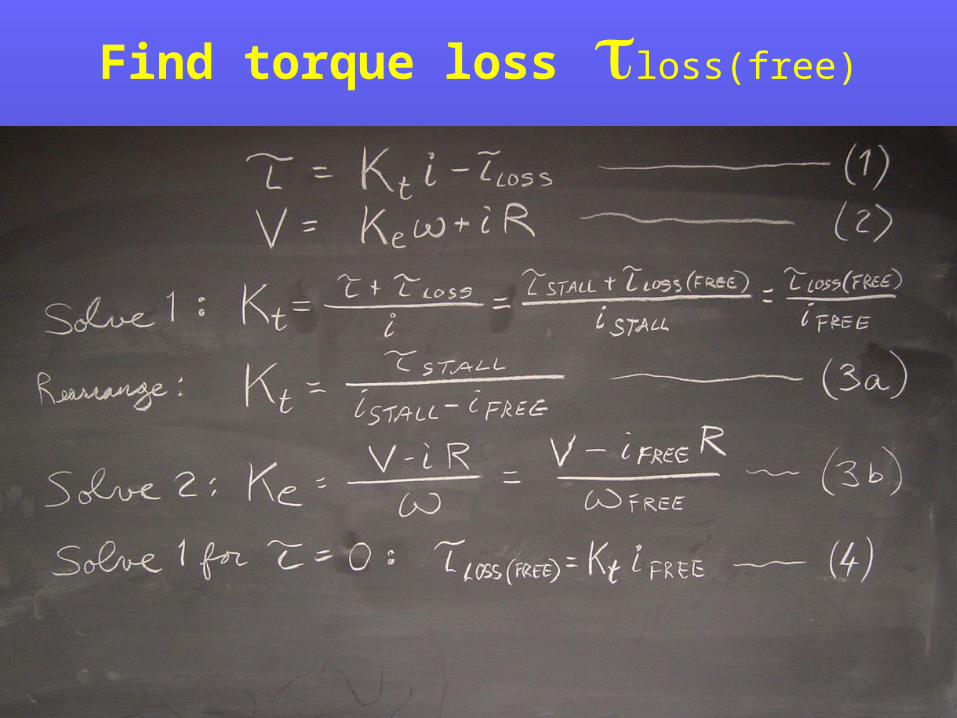
Find torque loss loss(free)
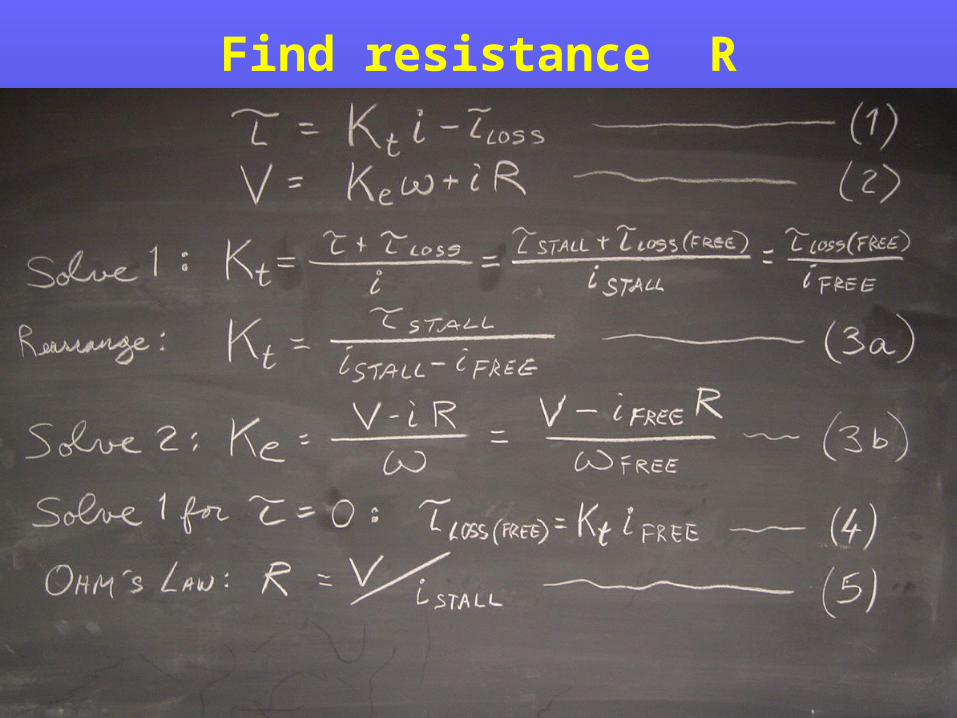
Find resistance R

Calculate current, speed, power and efficiency

From data sheet:
From equation 3a:
From equation 3b:
From equation 4:
From equation 5:
stall = 0.65 Nm
istall = 148 A
free = 2513 rad/s
ifree = 1.5 A
loss(free)
= 0.0044 Nm/A x 1.5 A = 0.0066 NmR = 12 V /148 A = 0.081
Fisher-Price Motor (2005)
Kt = 0.65 Nm / (148.0-1.5) A = 0.0044 Nm/A
Ke = (12 V -1.5 A*0.081 )/ 2513 rad/s = 0.0047 V/(rad/s)

Equations 6 - 11 allow us to calculate the following
performance curves as a function of torque (with constant voltage):
• current (6)• speed (7)• output power (8) • input power (9)• power loss (10)• efficiency (11)

Fisher-Price Motor - Current
Example motor
0
20
40
60
80
100
120
140
160
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70
Torque (Nm)
Cur
rent
, A
148 A

Fisher-Price Motor - Speed
Example motor
0
500
1000
1500
2000
2500
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70
Torque (Nm)
Spe
ed (r
ad/s
)

Fisher-Price Motor - Power output
Example motor
0
500
1000
1500
2000
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70
Torque (Nm)
Po
wer
(W
)
407 W

Fisher-Price Motor - Input Power
Example motor
0
500
1000
1500
2000
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70
Torque (Nm)
Pow
er (W
)
Output power, W
Input power, W
407 W
1800 W

Fisher-Price Motor - Power loss
Example motor
1800 W
0
500
1000
1500
2000
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70
Torque (Nm)
Pow
er (W
)
Output power, W
Power loss, W
Input power, W
407 W

Fisher-Price Motor - Efficiency
Example motor
0
10
20
30
40
50
60
70
80
90
100
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70
Torque (Nm)
Eff
icie
ncy,
%
76%
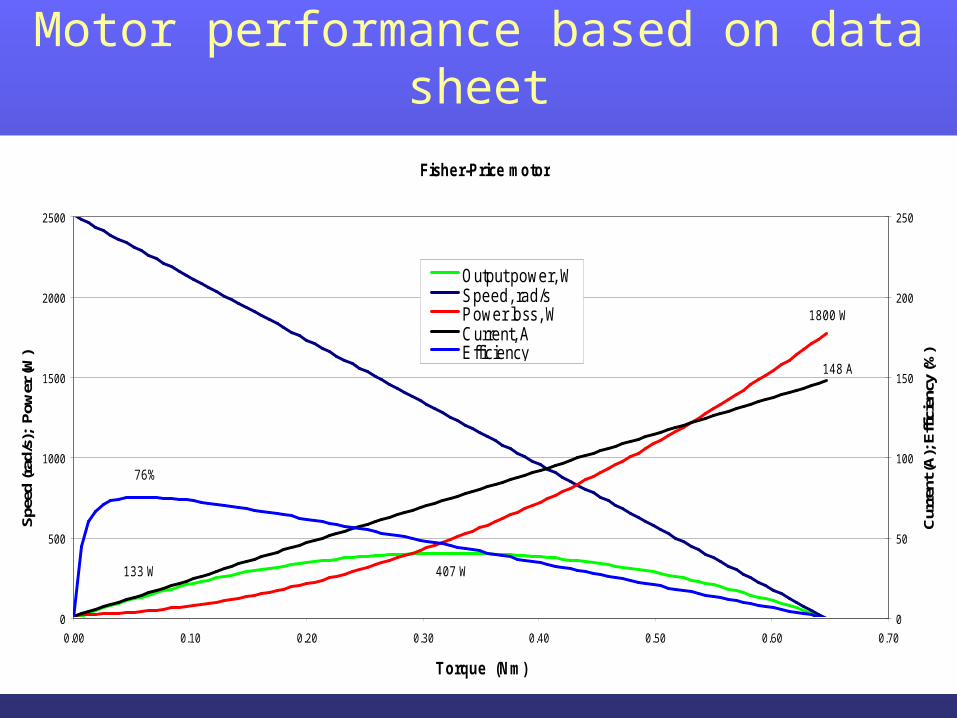
Fisher-Price motor
1800 W
0
500
1000
1500
2000
2500
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70
Torque (Nm)
Spe
ed (r
ad/s
); P
ower
(W)
0
50
100
150
200
250
Cur
rent
(A);
Eff
icie
ncy
(%)
Output power, WSpeed, rad/sPower loss, WCurrent, AEfficiency
148 A
76%
407 W133 W
Motor performance based on data sheet

Real World: Power loss
14 AWG wire: 3.0 m/ft.12 AWG wire: 1.9 m/ft.10 AWG wire: 1.2 m/ft. 6 AWG wire: 0.5 m/ft. (Copper at 65 °C)

Fisher-Price motor, stalled for approximately 2 s
0
20
40
60
80
100
120
140
160
-1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Time, s
Cu
rre
nt,
A;
Te
mp
era
ture
, °C
;
Re
sis
tan
ce
, mO
hm
0
2
4
6
8
10
12
14
16
Vo
lta
ge
, VMotor winding temperature measurement
Current
Motor terminal voltage
Battery voltage
~ Smoke ~
•This circuit was not properly protected (wrong circuit breaker)•Measuring thermocouple was inserted near windings (windings got hotter than thermocouple)•Brushes got hotter than windings
Fisher-Price Motor, stalled for approximately 2 s
Notes:

•Motor resistance increased from 67 m to 96 m (43%) in two seconds•Battery resistance = 18 m •Resistance of wires (5 ft. of 14 AWG), connectors, breakers, etc. = 25 m
Fisher-Price motor, stalled for approximately 2 s
0
20
40
60
80
100
120
140
160
-1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Time, s
Tem
per
atu
re, °
C;
Res
ista
nce
, mO
hm
Motor winding temperature measurement
Total circuit resistance
Motor resistance
Resistance of wires, connectors, breakers, etc.
Battery resistance
~ Smoke ~Fisher-Price Motor, stalled for approximately 2 s
Total circuit resistance increased to about twice the initial motor resistance
Fisher-Price motor
0
500
1000
1500
2000
2500
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70
Torque, Nm
Sp
ee
d (
rad
/s);
Po
we
r (W
)
0
50
100
150
200
250
Cu
rre
nt
(A);
Eff
icie
nc
y (
%)
Output power, W
Speed, rad/s
Power loss, W
Current, A
Effic iency
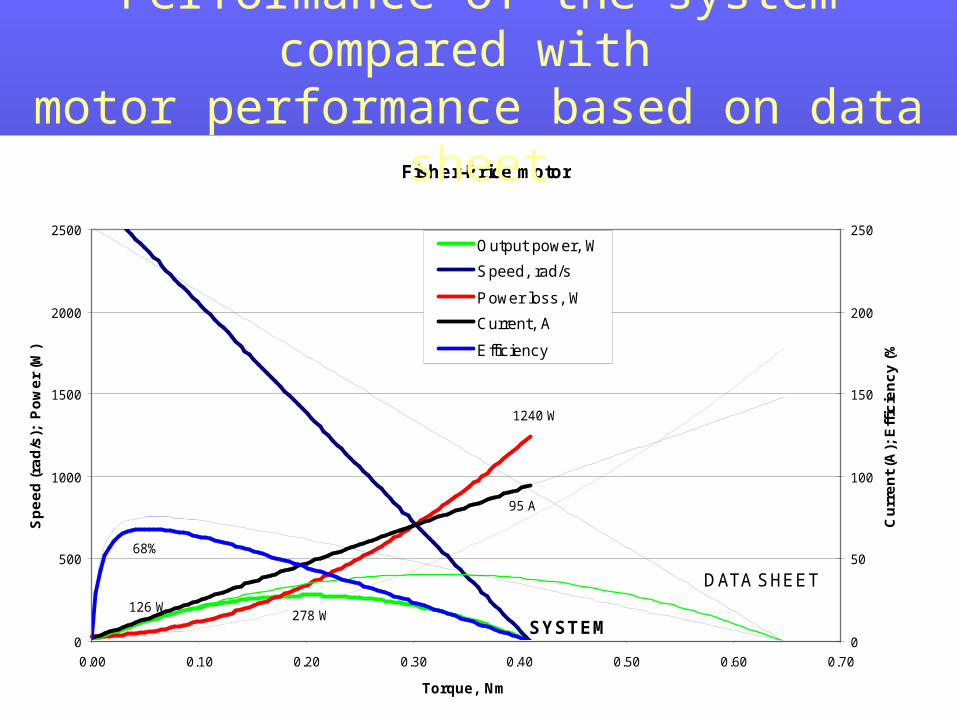
68%
278 W126 W
1240 W
95 A
SYSTEM
DATA SHEET
Performance of the system compared with motor performance based on data sheet

CIM motor (also known as Chiaphua and Atwood)

Stall torque stall = 347 oz-in = 2.4 Nm
Free speed free = 5342 rpm = 560 rad/s
Free current ifree = 2.4 A
Stall current istall = 114 A
CIM motor data and curves

CIM motor
0
200
400
600
800
1000
1200
1400
0 0.5 1 1.5 2 2.5
Torque, Nm
Sp
eed
(ra
d/s
); P
ow
er (
W)
0
20
40
60
80
100
120
140
Cu
rren
t (A
); E
ffic
ien
cy (
%)
Output power, W
Speed, rad/s
Power loss, W
Current, A
Efficiency
CIM motor performance curves

Comparison of power available from Fisher-Price motor and CIM motor
0
50
100
150
200
250
300
350
400
450
0 0.5 1 1.5 2 2.5
Torque, Nm
Ou
tpu
t p
ow
er,
W
Fisher-Price motor
CIM motor
Comparison of power available from Fisher-Price Motor and CIM motor

Simple strategy
• Calculate (or read from data sheet) the motor resistance R
• Increase R by 50% - 100%
• Calculate power curve
• Operate at half of new peak power

Comparison of power available from Fisher-Price motor and CIM motor
0
500
1000
1500
2000
2500
0 0.2 0.4 0.6 0.8 1 1.2 1.4
Torque, Nm
Sp
eed
, ra
d/s
0
50
100
150
200
250
300
350
400
450
500
Ou
tpu
t po
wer
, W
Speed, Fisher-Price motor
Speed, CIM motor
Fisher-Price motor, R increased by 75%
CIM motor, R increased by 75%
<--- Stay to the left of the peak power point
Performance curves re-calculated with R increased by 75%

"Gear" ratio: Mechanical power transmission
efficiency is important
• Spur gears: 90% per pair
• Worm and gear: 10%-60%
• Nut on a screw (not ball nut): 10%-60%
• Twist cables: 30%-90%
• Chain: 85%-95%
• Wire rope (cables): up to 98%
• Rack and pinion 50%-80%

Gear ratioExample: out = 1.5 Nm; out = 100 rad/s
Pmotor = Pout / g (12)

Gear ratio exampleOutput power = 1.5 Nm • 100 rad/s = 150 W
Try:Spur gears (assume 90% efficiency per stage)
Power required at motor Pmotor = Pout / g
one stage: Pmotor = 150 W / 0.9 = 167 W
two stages: Pmotor = 150 W / 0.9 /0.9 = 185 W
three stages: Pmotor = 150 W / 0.9 /0.9 /0.9 = 206 W
four stages: Pmotor = 150 W /0.9/0.9/0.9/0.9 = 229 W

Gear ratio exampleEstimate torque by inspection, then calculate an approximate gear ratio to determine how many gear stages are required.
Rule of thumb for spur gears: max. ratio per stage = 5:1
Comparison of power available from Fisher-Price motor and CIM motor
0
500
1000
1500
2000
2500
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Torque, Nm
Sp
ee
d,
rad
/s
0
100
200
300
400
500
Ou
tpu
t p
ow
er,
W
Speed, Fisher-Price motorSpeed, CIM motorFisher-Price motor, R increased by 75%CIM motor, R increased by 75%4 stages3 stages2 stages1 stage
0.4 Nm ?
0.1 Nm ?

Gear ratioFisher-Price Motor

Gear ratio - Fisher-Price MotorChoosing operating point for Fisher-Price motor
0
500
1000
1500
2000
2500
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Torque, Nm
Sp
ee
d,
rad
/s
0
100
200
300
400
500
Ou
tpu
t p
ow
er,
W
Speed, Fisher-Price motor
Power, Fisher-Price motor, R increased by75%Operating point
Tw o stages: 185 W
1850 rad/s
Check: gear ratio Ng = motor/out = 1850 / 100 = 18.5:1 = 4.3 • 4.3Operating point looks good (comfortably to the left of the peak power point)

Gear ratioCIM motor

Gear ratio - CIM motorChoosing operating point for CIM motor
0
500
1000
1500
2000
2500
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Torque, Nm
Sp
eed
, ra
d/s
0
100
200
300
400
500
Ou
tpu
t p
ow
er,
W
Speed, CIM motor
Power, CIM motor, R increased by 75%
Operating point
One stage: 167 W
0.43
Nm
388 rad/s
Gear ratio Ng = motor/out = 388 / 100 = 3.9:1Moderately heavy load for this motor (near peak power)

Gear ratio example
• Calculate current– Should not exceed breaker current
• Choose motors based on– Power– Gearing required– Possibility of stalling and heating – small motors heat
up fast– Weight– All motor tasks

Summary of motors in the 2005 Kit of Parts
Sorted by peak output power
SupplierNumber on motor Motor name Description
Reference Voltage on data sheet Gear ratio
Stall torque (as from data sheet)
Stall torque (Nm)
Stall current (A)
Free speed (rpm)
Free speed (rad/s)
Free current (A)
Peak power, 10.5 V supply (W )
Fisher-Price
74550-0642 Power W heels Motor only 12 647 mNm 0.647 148 24000 2513 1.5 312
CIM FR801-001 (Chiaphua, Atwood)
Keyed output shaft, ccw 12 346.9 oz-in 2.45 114 5342 559 2.3 261
Fisher-Price
74550-0642 Power W heels Motor and gearbox 12 180.8492308 77 148 133 13.9 2.5 203
Globe 409A586 2W D/4W D transfer mtr.
Motor only 12 35 oz in 0.247 21.5 9390 983 0.4 46
Taigene 16638628 Sliding (van) door
W orm Gearmotor 10.5
34 Nm cw, 30 Nm ccw 30 44 75 7.9 2.7 44
Globe 409A587 2W D/4W D transfer mtr.
Planetary Gearmotor 12 117 13 21.5 80 8.4 0.58 24
Nippon-Denso
E6DF-14A365-BB
W indow Lift W orm Gearmotor 12.6 9.2 Nm 9.2 24.8 92 9.6 2.8 16
Jideco W indow Lift W orm Gearmotor 12 8.33 Nm 8.33 21 85 8.9 3 14
Mabuchi RS454SH W /spur gear ccw
Spur pinion on shaft 12 620 g-cm 0.061 5.2 4700 492 0.22 5.7

Comparison of motors in the 2005 Kit of Parts
Speed and torque at peak power with 10.5 V supply
1
10
100
1000
10000
100000
0.01 0.1 1 10 100
Torque, Nm
Sp
ee
d, r
ad
/s
5 W
10 W
20 W
50 W
100 W
200 W
500 W
Mabuchi
Jideco
Nippon
Globe with gearhead
TaigeneFisher-Price with gearbox
Fisher-Price motor alone
CIM
Globe motor alone
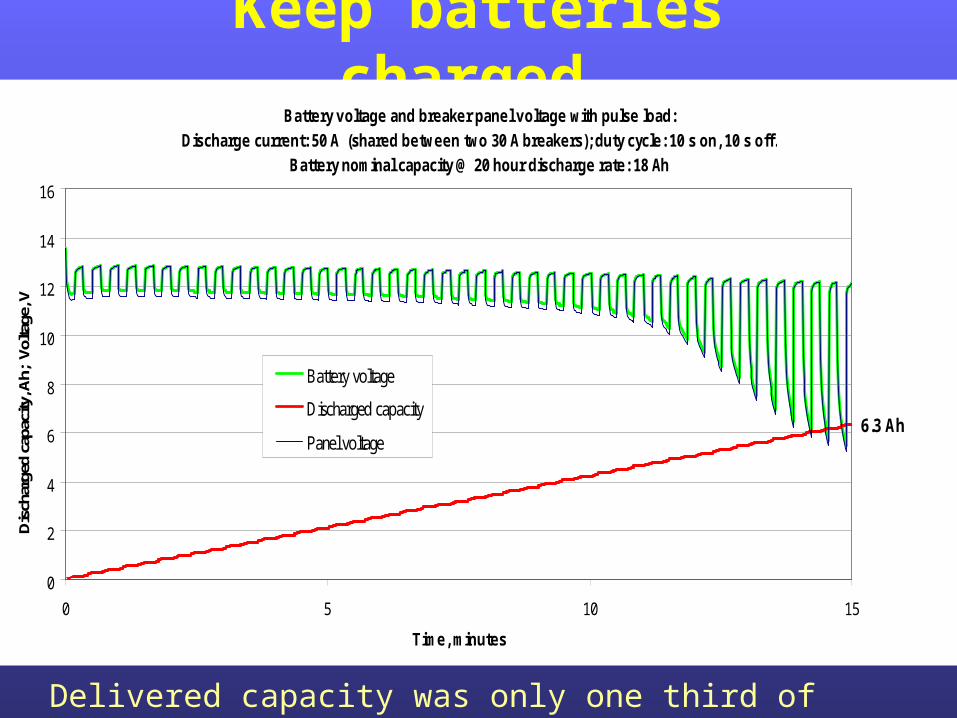
Keep batteries charged.Battery voltage and breaker panel voltage with pulse load:
Discharge current: 50 A (shared between two 30 A breakers); duty cycle: 10 s on, 10 s off.
Battery nominal capacity @ 20 hour discharge rate: 18 Ah
0
2
4
6
8
10
12
14
16
0 5 10 15
Time, minutes
Dis
char
ged
capa
city
, Ah;
Vol
tage
, V
Battery voltage
Discharged capacity
Panel voltage6.3 Ah
Delivered capacity was only one third of rated capacity.

Keep batteries charged.Battery DC resistance during pulsed discharge.
Pulse: 50 A for 10 s, 0 A for 10 sResistance calculated from voltage drop and pulse current, at 1 s intervals throughout the pulse.
0
20
40
60
80
100
120
140
160
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0
Discharged capacity, Ah
DC
resi
stan
ce, m
illio
hms
0
2
4
6
8
10
12
14
16
Bat
tery
ope
n ci
rcui
t vol
tage
, V
Battery resistance
Panel plus wire resistance
Battery open-circuit voltage 1 second
2 s
3 s4 s
5 s
10 s

Conclusion
• Proper motor selection, good wiring, an appropriate gear ratio, aligned mechanical components, and a full battery will keep you alive in the heat of the battle.
• Power loss is often a significant fraction of the power consumed. Include all losses in analysis.
• Analyze, but test, too!
• Have fun