Geometric Design of Mechanically Reachable Surfaces · Geometric Design of Mechanically Reachable...
17
Geometric Design of Mechanically Reachable Surfaces J. Michael McCarthy and HaiJun Su University of California, Irvine Mathematics Seminar California State University, Long Beach February 27, 2004
Transcript of Geometric Design of Mechanically Reachable Surfaces · Geometric Design of Mechanically Reachable...

Geometric Design of MechanicallyReachable Surfaces
J. Michael McCarthy and HaiJun SuUniversity of California, Irvine
Mathematics Seminar
California State University, Long Beach
February 27, 2004

Overview
• Robot manipulators and spatial mechanisms as assemblies of serial chains.
• The seven serial chains with reachable surfaces.
• The model problem: determining a sphere through four points.
• Counting the solutions for a set of polynomial equations.
• The design equations for the seven serial chains.
• The homotopy solution methodology for polynomial equations.
• POLSYS-GLP results.
• Other serial chains and our Synthetica software.
• Conclusions.

Geometric Design
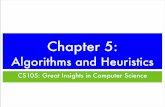
• The kinematic structure of a robot manipulator or spatial mechanism is thenetwork of links and joints that define its movement.
• The primary component of this network is the serial chain of links connected byjoints. One end of the chain is the base, and the other is the end-effector.
Serial Robot PUMA 560 Parallel Robot HEXA
The goal of geometric design is to determine the physical dimensions of a serial chainthat guarantee its end-effector can achieve a specified task.

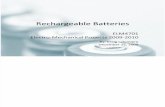
Reachable Surfaces
PPS chain: PlaneTS chain: Sphere
RPS chain: Hyperboloid
right RRS chain: Circular torus
RRS chain: TorusCS chain: Circular cylinderPRS chain: Elliptic cylinder

The Model Problem
• Consider the problem of determining a sphere that contains four specified points.
• Let R be the radius of the sphere, B=(u, v, w) its center, and P=(X, Y, Z) be a generalpoint on the sphere, then we have
(X-u)2 + (Y-v)2 + (Z-w)2 = R2, or (P-B)⋅(P-B) = R2
Now let Pi=(Xi, Yi, Zi), i=1, 2, 3, 4 be four specified points, so we have
Pi ⋅ Pi - 2 Pi ⋅ B + B ⋅ B = R2, i=1, 2, 3, 4
Subtract the first equation from the remaining to cancel the terms B ⋅ B and R2,
S: (Pi+1 ⋅ Pi+1 - Pi ⋅ Pi) - 2 (Pi+1 - Pi) ⋅ B = 0, i=1, 2, 3.
This is a set of three linear equations in the parameters B=(u, v, w). There canbe at most one solution, which defines the sphere that contains the four points.

Generalizing the Problem
• Rather than specify the points Pi=(Xi, Yi, Zi), we now specifyseven spatial displacements [Ti ]=[Ai, di], that define task positionsfor an end-effector.
• We now seek p=(x, y, z), B=(u, v, w) and R, such that Pi = [Ti ]p lie on the sphere:
(Xi-u)2 + (Yi-v)2 + (Zi-w)2 = R2, or ([Ti ]p-B)⋅([Ti ]p-B) = R2, i=1,…, 7
Subtract the first equation from the remaining to cancel the terms B ⋅ B and R2,
S: (Pi+1 ⋅ Pi+1 - Pi ⋅ Pi) - 2 (Pi+1 - Pi) ⋅ B = 0, i=1,…, 6, where Pi = [Ti ]p .
This is a set of six quadratic equations in the parameters B=(u, v, w) and p=(x, y, z).There can be at most 26=64 solutions.Each solution defines a TS chain that guides its end-effector through the task positions [Ti ].

Counting Solutions
• Total degree: A system of n polynomials of degree d1, d2, … , dn in nvariables has at most D = d1d2… dn isolated solutions. (Bezout, 1779)
• Monomial polytope root count (BKK theory): Proof: Bernshtein, 1975Algorithms: Canny, 1991, Gao and Li, 1999.
• Multihomogeneous root count: Morgan & Sommese, 1987
• General Linear Product root count: Verschelde & Haegemans, 1993,Morgan, Sommese, & Wampler, 1995

General Linear Product
• A polynomial system has the same number, dimension, and degree of solutioncomponents for “almost all” values of the coefficients.
• This means we can count solutions (roots) using a polynomial system that has thesame monomial structure though different coefficients.
Let <u, v, w> denote the linear combination “a1 u + a2v +a3w + a4 “ where ai aregeneric coefficients.
Then the quadratic curve Ax2 + Bxy + Cy2 + Dx + Ey + F = 0 can be written as thelinear product <x, y><x, y>=0
Example: Consider the two plane curves:
C1: A1 x2 + B1 xy + D1 x + E1 y + F1 = 0, <x><x, y>|1 = 0
C2: A2 x2 + B2 xy + D2 x + E2 y + F1 = 0, <x><x, y>|2 = 0
How many solutions? 1
1
1 Three.

The TS Serial Chain
Expanding (Pi+1 ⋅ Pi+1 - Pi ⋅ Pi), we find that the quadratic terms cancel and this termactually has the form <u, v, w>, which means the TS chain equations actually havethe form:
Polynomials with this structure have (63) = 20 roots, which means there are at
most 20 TS chains that can reach the seven task positions.
123and so on for (63).
S: <u, v, w><x, y, z>|1 = 0,<u, v, w><x, y, z>|2 = 0,<u, v, w><x, y, z>|3 = 0,<u, v, w><x, y, z>|4 = 0,<u, v, w><x, y, z>|5 = 0,<u, v, w><x, y, z>|6 = 0.
The equations for the TS chain have the monomial structure:
S: <u, v, w><u, v, w> - <u, v, w><x, y, z>|i = 0 , i=1, … , 6

Design Equations
4,194,304
2,097,152
2,097,152
262,144
16,384
64
32
Total
Degree
448,70211-4th12Torus
(RRS)
868,3521-2nd, 10-4th10Circular Torus
(right RRS)
247,9682-3rd, 9-4th10EllipticCylinder (PRS)
9,2169-4th10Hyperboloid
(RPS)
2,1847-4th8Circular
Cylinder (CS)
206-2nd7Sphere (TS)
105-2nd6Plane (PPS)
GLP
Bound
Equations-
degree
Number
Task Positions

Solving the Design Equations
• The goal is to find all of the real solutions to the design equations. They are areall candidates designs.
• Resultant techniques can be used systems with as many as 50 roots, andeigenvalue elimination methods can extend this to as as high as 100 roots.
• Systems of equations with hundreds and thousands of roots require polynomialhomotopy solution methods.

Polynomial Homotopy
• Let P(z) be the system of polynomial design equations, and we seek all thesolutions z to P(z)=0.
• Now let Q(z) be a polynomial system that has the same monomial structure asP(z), which means we require it to have the same GLP structure.
• The NGLP roots of Q(z)=0 are easily computed by solving linear equations.
• Construct the convex combination homotopy H(λ, z) = (1- λ)Q(z) + λ P(z), whereλ ∈ [0, 1) .
• For each root z = aj of Q(z)=0 the homotopy equation H(λ, z) = 0 defines a zerocurve γj, j=1, …, NGLP, which is a connected component of H-1(0).
Each zero curve of H(λ, z) = 0 leads either to a root of P(z)=0 or a root at infinity.

Tracking Zero Curves
• A zero curve can be parameterized by its arc-length s, so it has the form γj =(λ(s), z(s)). We seek the sequence of points yi ≈ (λ(si), z(si)) along γj.
• Along the zero curve γj, we have H(λ(s), z(s))=0, therefore
The matrix [JH] = [Hλ Hz] is the nx(n+1) matrix of partial derivatives.
• Notice that v = (dλ/ds, dz/ds) is tangent to the zero curve, and it is in thenull-space of [JH].
• This allows us to estimate the next point along γj by the formula yi+1 = yi + (si+1 - si)v(si).
This is essentially numerical integration of an ODE and can be solved with efficientpredictor-corrector methods. Furthermore, it is well-adapted for parallel computation.

Number of Solutions
42,615
94,622
18,120
1,024
804
20
10
Number
Roots
POLSYS-GLP
40m/1024cpu448,7024,194,304Torus
(RRS)
POLSYS-GLP
70m/1024cpu868,3522,097,152Circular Torus
(right RRS)
POLSYS-GLP
30m/8cpu247,9682,097,152Elliptic
Cylinder (PRS)
PHC
24 hrs.9,216262,144Hyperboloid
(RPS)
PHC
5+ hrs.2,18416,384Circular
Cylinder (CS)
resultant2064Sphere (TS)
resultant1032Plane (PPS)
comments
GLP
Bound
Total
Degree

SYNTHETICA 2.0
These results are being integrated into computer-aided design softwarein the Robotics and Automation Laboratory at UCI.

Other Spatial Chains
Here we have discussed seven spatial serial chains. The spatialconstrained serial chains can be enumerated:
There are 15 classes with an additional 35 special cases. Includingpermutations there are 191 chains.

Conclusions
• Kinematic synthesis of spatial chains provides the opportunity to invent newdevices for controlled spatial movement.
• The seven serial chains PPS, TS, RPS, PRS, CS, right RRS, and RRS havereachable surfaces that can be shaped so that the end-effector reaches a largenumber of specified task positions.
• The general cases have a remarkably large number of solutions. Yet 90% ofthe paths traced by our homotopy algorithm are a waste of cpu-time.
• More efficient solution procedures are needed to make computer-aided-invention practical.
• In fact, we are beginning to consider very large scale computing that evaluatesthe solutions of the design equations for large number of serial chains.