geoinformatics 2013 vol03

of 52
-
Upload
protogeografo -
Category
Documents
-
view
34 -
download
0
description
geoinformatics 2013 vol03
Transcript of geoinformatics 2013 vol03
-
Cloud Computing and GIS 3D Laser Scanning Boosts BIMTetracams Range of Airborne Products FME 2013
Magazine for Sur vey ing, Mapping & GIS Profess iona ls April/May2 0 1 3Volume 16
3
-
The Value of LocationConsidering the current state of the industry, two recent publications shed somelight on its size, economic impact and factors for expansion. These reports, whichwere initiated by Google and prepared by two consulting organizations, coverthe US and global market for geospatial services. Although the outcomes of thereports were not surprising in terms of new facts, they provided some interestinginsights into how the industry is faring and expanding beyond its parameters.
In his analysis of the reports, blogger Matt Ball noticed how difcult it is to assessthe Geo industry, or make a distinction between geospatial and non-geospatialcompanies. Nowadays, location has become ubiquitous, something that is part oftechnology under the hood and often taken for granted by consumers; nothingnew here.
However, for the industry, this causes new challenges, since it has to change itsapproach in both addressing users and technology. Education also has to changesince the industry is asking for different skills than they used to. This is also acknowl-edged in the two Google reports, and the industry is already taking action: Esrirecently announced a new Master of Science in Geospatial Technologies pro-gram, and has partnered with three European universities to make this happen.For an industry that is coping with a lack of visibility on the job market, this is agood initiative. And although GIS jobs arent being named as such, the demandon the job market for skilled GIS people is still there. Despite a global crisis, thegeospatial industry is surviving remarkably well and holds a lot of promise for thefuture.
Going back to the here and now, a number of recent partner-ships between big names in the geospatial industry seems toindicate that something has to happen in order to get thingsmoving. It cant be coincidence that there are so many partner-ships being formed at the same time: theres Google andSmallworld, Pitney Bowes partnering with Autodesk, and theresBentley working together with Trimble.
During discussions about these partnerships with the compa-nies involved, they offer assurance of new solutions andannouncements in the coming months and, of course, thesewill be covered in future issues. One development thatcaught my interest is the convergence of geospatial dataand BIM, in terms of the gap that continues to existbetween 2D and 3D data. Despite exciting newtrends such as the cloud and using the internet asa local le system, some things never change.
Enjoy reading,
Eric van Rees
GeoInformatics is the leading publication for GeospatialProfessionals worldwide. Published in both hardcopy anddigital, GeoInformatics provides coverage, analysis andcommentary with respect to the international surveying,mapping and GIS industry.GeoInformatics is published 8 times a year.
Editor-in-chiefEric van Rees [email protected]
Copy EditorElaine Eisma
EditorRemco [email protected]
Contributing Writers:Geoff Jacobs, E. N. Skripnik, Luigi Colombo, Barbara Marana, Jim Baumann, Gordon Petrie, Grant Ian Thrall, Huibert-Jan Lekkerkerk.
ColumnistMatt Sheehan
Marketing & SalesRuud [email protected]
SubscriptionsGeoInformatics is available against a yearly subscription rate (8 issues) of 89,00.To subscribe, ll in and return the electronic replycard on our website www.geoinformatics.com
Webstitewww.geoinformatics.com
Graphic DesignSander van der [email protected]
ISSN 13870858
Copyright 2013. GeoInformatics: no material maybe reproduced without written permission.
P.O. Box 2318300 AEEmmeloordThe NetherlandsTel.: +31 (0) 527 619 000 Fax: +31 (0) 527 620 989 E-mail: [email protected]
GeoInformatics has a collaboration withthe Council of European GeodeticSurveyors (CLGE) whereby all individualmembers of every national Geodeticassociation in Europe will receive themagazine.
3
Photo
graphy: ww
w.bestp
icture
s.nl
-
A r t i c l e s3D Laser Scanning Boosts BIM 6
Monitoring Ice and Spring Flood Progress 10
Cloud Computing and the GIS World 18
GIS Against Annual Snow Assault 22
Exelis Visual Information Solutions 24
Tetracams Range of Airborne Products 26
Maptitude 2013 32
BeiDou, GPS and Galileo 40
C o l umn sMobile GIS and GeoFencing 16
E v e n tOptechs ILSC 2013 Conference 38
I n t e r v i ewFME 2013 14
News l e t t e r sEurogeographics 43
ISPRS 44
CLGE 46
C a l e n d a r / A d v e r t i s e r s I n d e x 50
On the cover:Angkor Wat is one of the worlds most recognizable temples.Designated as a UNESCO world her-itage site in 1992, this temple was built by the ancient Angkorian civilization in the 12th centuryunder King Suryavarman II.Angkor Wat was the center of a once massive and powerful nation sus-pected of being the largest in the world at the time with up to one million citizens. Supporting sucha population required a large infrastructure of water works during the arid Cambodian dry sea-son.In the past, archaeologists have used radar and remote sensing data to try to make sense ofthe greater Angkorian civilization. It is suspected that a sophisticated water infrastructure consistingof reservoirs, canals and dams captured the water ow from the highlands and was distributed itthroughout the rice paddies of the lowlands. Image credit: Chris Cromarty/McElhanney.
-
40
24
10Satellite images, were used formonitoring and control of fastice and spring flood progresson the rivers of the Northern
Dvina basin (Northern Russia).The imagery was operational-ly provided by ScanEx RDC.
6
Exelis VIS will be releasing service packs for its main image processing product
ENVI, as well as ENVI LiDAR,its new product for extracting3D features from LiDAR data.
Theres a lot of buzz about BIMand what its rapid adoptionmeans to surveying, design,
and construction professionals.BIM allows the generation andmanagement of physical andfunctional properties of a buil-ding by digital representation.
The long awaited BeiDouInterface Control Document
(ICD) is here. Just a few daysafter the publication of the last
GNSS update in this magazine, the ICD for theOpen Service signal B1l
became available.
22Located in northern Europe,snow cover in Pori lasts more
than one-third of the entire year.Snowplowing operations in thecity were managed in inefficient
way, until GIS technology allowed for route optimizationmodels, yielding savings inboth time and fuel costs.
18The article provides an over-view about Cloud compu-ting; a technology which israpidly growing and sprea-ding into our lives and willhave significant consequen-
ces in the future.
14
Recently, Safe Software released FME 2013 for
Desktop and Server. DonMurray and Dale Lutz. Of particular interest are point
cloud data files, ZIP and URLsupport and the ability to
process large volumes of real-time data.
26The article outlines the develop-ment and the main features of
the very lightweight small-formatdigital frame cameras that havebeen designed and produced byTetracam for the acquisition offalse-colour and multi-spectralphotography from both man-ned and unmanned airbor-
ne platforms.
-
6Article
Theres a lot of buzz about BIM Building Information Modeling and what itsrapid adoption means to surveying, design, and construction professionals. BIMallows the generation and management of physical and functional properties ofa building by digital representation. The surveying and mapping firm Woolpertwas recently involved with a large BIM project that took advantage of currentadvances in field data capture and office processing based on Leica Geosystemslaser scanners and point cloud software. These advances significantly improvedthe efficiency of applying 3D laser scanning for the creation of accurate, intelli-gent 3D models the foundation of BIM.
By Geoff Jacobs
3D Laser Scanning Boosts BIMC r e a t i n g I n t e l l i g e n t 3 D M o d e l s
April/May 2013
For the new project, Woolpert used their two new, compact, and versatile Leica ScanStation C10s.
-
7Latest News? Visit www.geoinformatics.com
The Woolpert team and the architec-ture and construction rm BeckGroup were contracted by the UnitedStates General Services Admini -stration (GSA) to provide accurate
BIM deliverables for federal buildings inAtlanta, Georgia. The two rms had previous-ly teamed up for a similar project at the samecampus as part of a pilot scan-to-BIM studythat GSA had sponsored. For this second pro-ject with ve buildings - two 30-oor buildingsand one each of six, nine, and ten oors dat-ing back to the 1920s, GSA had a xed bud-get allocated for data capture and BIM cre-ation. To meet the budget constraints and anambitious schedule, and to try to exceed clientexpectations, both Woolpert and The BeckGroup turned to innovations based on LeicaGeosystems laser scanning tools.
Woolperts nal deliverables to The BeckGroup were registered, geo-referenced pointclouds. The end client (GSA) requiredAutodesk Revit BIM models of each building,with separate models for interior, structural,faade, as well as site models. Separate BIMmodels enabled the client to keep each Revitle below 100MB. In total, Beck had to deliv-er BIM models covering 4.5 million squarefeet of building area. So, both in eld andofce work this was a large project and itentailed signicant ofce time to create themodels.
Field InnovationsFor the new project, Woolpert used their twonew, compact, and versatile Leica ScanStationC10s. Woolpert developed an innovativeeld approach for their ScanStation C10s thatenabled them to beat the efciency of theirprior approach and exceed client expecta-tions.
Woolpert placed each of two ScanStationC10s on rolling tripods and used a wirelesstablet controller to execute eld scanning andphoto capture. The rolling tripod reduced thetime for set up, tear down and moving of thescanner from station to station. It also elimi-nated powering off and re-booting eachScanStation C10 between setups. A crew ofthree operated both 3D laser scanners simul-taneously.
Eliminating scanner setup, tear-down, andpowering off/on between stations saved veminutes per setup, resulting in a time reduc-tion of 36 percent. With more than 400setups, the net savings were signicant. Using a wireless tablet with a larger display
to control scanning, photo capture, and tar-get acquisition provided high visibility for scanquality monitoring and better zooming resolu-tion for critical aiming at targets. In addition,operators were free to roam while scanningand were able to record targets with the tabletwhile walking to the next location.
Comparing eld efciency of the newapproach to pilot project metrics, the overallaverage time per scan was reduced by 23percent.
Ofce InnovationsThere were also two innovations on the ofceside of the project - one by Woolpert related
to monitoring eld capture progress and theother by The Beck Group for speeding the pro-cessing of registered scans into intelligent 3DBIM models.
The buildings were secure government ofcesin Atlanta, over 700 miles from Woolpertsmain laser scanning administration ofce inDallas, Texas. The Beck Group ofce was inAtlanta. To improve internal communicationsand client interaction during the two-weekscanning portion of the project, Woolpert inte-grated Leica TruViews directly into AutoCADdrawings of the buildings. TruViews -lightweight le sets that enable intuitive,panoramic viewing of scans and photos overthe web enabled internal, client, and part-ner staff to easily monitor scanning progressand ensure that areas being scanned were theright ones, thus avoiding return trips to the site.Users could also measure from scan images,pan/zoom, mark-up, and even link images toother content.
In the early stage of creating Revit models, TheBeck Group staff modeled based on old draw-ings and CAD les. To ensure accurate as-ismodel geometry, BIM models and registeredpoint clouds were overlaid in Navisworks andcompared. The BIM model was adjusted asneeded and then re-checked in Navisworks.However, simply opening large point cloudswithin Navisworks took a long time and theprocess was not as exact as being able to cre-ate the BIM model directly from point clouds.
Beck looked for an alternative solution toincrease production of as-built models. WhenLeica CloudWorx for Revit rst became avail-able in January 2012, Becks staff was eagerto try it out for this project. Leica CloudWorxplug-ins enable users to work efciently withpoint cloud data directly within CAD (e.g.AutoCAD) and VR (Virtual Reality) applica-tions. They have been very popular ever sincethey were rst introduced in 2001. Today,there are eight different Leica CloudWorx plug-ins for specic CAD and VR applications.Leica CloudWorx for Revit is the latest addi-tion to the Leica CloudWorx family.
One immediate benet was Becks ability toopen registered scan les directly fromCloudWorx Cyclone database and project lestructure without any data conversion steps.However, Beck also found some limitations inthis rst release version that prevented themfrom using it the way they needed to whichwas to create BIM models directly from pointclouds.
Woolpert placed each of two ScanStation C10s on rolling tripodsand used a wireless tablet controller to execute field scanning and
photo capture.
3D building and model
-
8Article
Becks BIM Manager, Jason Waddell, workeddirectly with Leica Geosystems ProductManager, David Langley, providing inputabout their initial ndings. This resulted in asecond version of Leica CloudWorx for Revitthat did everything Beck expected.
Beck could now readily manage very largepoint cloud les, and quickly manipulate scans- even high density areas - for efcient 3Dviewing. He was also able to quickly slice andcrop point cloud areas of interest directly.Furthermore, the new version allowed him toperform fast, accurate elevation & plan sec-tioning, set levels & work-planes, and directlyplace doors, light xtures, and even modelpiping from point clouds (in Revit MEP).
Ultimately Beck was able to eliminate the pre-vious workow steps of loading and viewingpoint clouds and models in Navisworksand/or Revit. Overall, using Leica CloudWorxfor Revit enabled Beck to increase ofce pro-
ductivity for creating accurate BIM modelsbased on laser scan data by about 50 percent- signicant savings for a large project like this.
Geoff Jacobs [email protected], is Senior VicePresident, Strategic Marketing, for Leica Geosystems HDS business.
This article was first published in Leica Reporter 67
Doorway model with scan
-
10Article
In the autumn to spring period of 2011-2012, satellite images were used for the monitoring and control of fast ice and spring flood progress on the rivers of the NorthernDvina basin (Northern Russia). In comparison to previous years, the 2012 flood hitthe highest water levels and adverse water marks across most of the ArkhangelskRegion territory. The imagery was operationally provided by ScanEx RDC.
By E. N. Skripnik
Monitoring Ice and SpringFlood Progress
IntroductionIce drift and spring ood are natural events, which occur regularlyas part of the river regime. Every year the spring ood on the riversof the Archangelsk Region develops and follows following its ownpath, but more often than not with ice jam stops and inundations,both during the ice drift period and during clear water periods. The basin of the Northern Dvina covers an area of 360 thousandsq. km. Almost all of this territory lies within the Archangelsk Regionand the Komi Republic with just its southern skirt being in the Vologdaand partially in the Kirov regions. The largest rivers in the basin,excluding the Northern Dvina itself, include the Sukhona, Yug,Vychegda, Vaga and Pinega.
In the preparation period before ice drift and ood, a key role isplayed by hydrological forecasts and the accurate prediction ofadverse and dangerous developments. Due to the continuous andsudden changing nature of hydrometeorological events the forecastsare regularly updated, which allows for either the setting of a high-er threat level for an expected adverse event or for action to be takento clear it in plenty of time. Previous experience has demonstratedthat the correct use of hydrological information lowers ood induceddamage on average by 30%.
Space imageryThe most reliable, regular, full and current ice situation assessment,both in the winter period and in ice drift and spring ood period, isprovided by space imagery which originates from the Research andDevelopment Center of ScanEx.
In the winter to spring period of 2011 2012 the imagery was col-lected using radars with a synthesized aperture tted on boardRADARSAT-1 and ENVISAT (before it became inoperable in April2012). The images from these satellites comply with monitoring con-ditions and guarantee all-weather imagery. To ensure the accurateassessment of any consequences from the spring ood and the abili-ty to determine losses incurred by the economy and population ofthe Archangelsk Region, imaging was performed on a daily basisin May using optical and radar satellites RADARSAT-1, EROS B, etc.In the winter to spring season, ScanEx RDC delivered regular imagesfrom various satellites which enabled the monitoring of the freeze-upprocess on the River Northern Dvina and its tributaries (the riversVaga and Pinega), identifying ice structure and potential locationsof spring ice dams. In the period when the development of the spring
R u s s i a s N o r t h e r n D v i n a B a s i n R i v e r
April/May 2013
Figure 1: Ice dam sections on the River Pinega (Nizhnyaya Palenga settlement, Kuzomen settlement)detected on the image of ENVISAT dated December 30th 2011 (source: ESA, ScanEx RDC)
Figure 2: A fall ice jam on the River Northern Dvina (the section of Nizhniye Karyery) on the image ofEROS A received on March 22nd 2012 (source: ImageSat, ScanEx RDC)
-
11
Latest News? Visit www.geoinformatics.com
ood is at its most complex, on the rivers in the region and neigh-boring territories, the supplied images allowed tracking of the oodwave propagation, the start of areas of inundation, intensity of pro-cesses, distribution of inundations along the rivers course and acrossthe oodplain, ooding of roads and settlements and exit of territo-ries from the ood zone. Processed data was transferred via theweb-portal operating on the basis of Geomixer technology.
The acquired images allowed early identication of spring ice dam-jam locations on the River Northern Dvina in the vicinity of Kotlascity, Krasnoborsk village, Rochegda and Orletsy settlements, at theexit from the arms of the Kholmogorskoye fork (Vainovo), and at theentrance to the Koskovsky arm. More powerful spring jams weredetected at two locations on the Pinega River. This information wasused in a selection of sections for eld surveying in preparation forforecasts, warnings and consultations.
All detected sections with spring dams and jams on the RiverNorthern Dvina in spring 2012 caused spring ice jams of varyingmagnitude and certainly played a role in the development of adverseevents on the territory of the region, which proves that it is essentialto use regular satellite information in operational practices.
Specics of ice cover formation on the Northern Dvina RiverThe freeze-up on the rivers of the Northern Dvina can be predictedusing long-term annual average calculations, in the third week ofNovember, at regular and a bit lower than standard levels. The win-ter of 2012 was mild and with little snow in the rst half and frostyand with a great deal of snow in the second half.
The rst image (EROS B) was received from ScanEx RDC onNovember 18th 2011 (after a powerful fall surge in the delta andestuary area of the River Northern Dvina). Application of this dataprevented the formation of any danger from powerful ice jams atthe exit from the arms of the Kholmogorskoye fork and serious inun-dation of Kholmogory settlement. Break-up of the principal channeland its fast freeze-up ruled out formation of fall and spring ice jamsin this area and remaining freeze-up downstream the fork is usuallybroken down by icebreakers in preparation for the ice drift.
The space imagery from December 30th 2011 detected two jam sec-tions on the River Pinega (Nizhnyaya Palenga village and Kuzomensettlement, Figure 1). The expedition eld survey at the end ofFebruary 2012 conrmed the presence of jams but rated them aslower risk than those of the previous year. As the ice drift passed thissection, a spring ice jam formed and stayed there for about threedays. This turned out to be more powerful than expected due to thetwo fall jams detected on satellite imagery. Water level according tothe temporary gauge station at Kuzomen reached the mark of 949cm, which exceeded the norm by 269 cm and the adverse mark by129 cm. The overlaying chart of water level changes, according tothe temporary gauge station at Kuzomen, shows the magnitude ofbackwater and jam. The ice jam caused considerable inundation ofthe oodplain, local roads and settlements.
During ice drift in the vicinity of the Orletsy settlement, the jam last-ed three days (April 28 30, 2012). The water level, according tothe temporary gauge station at Orletsy, reached 1,120cm and wasthe highest since 2003. On April 29th aerial ice reconnaissancedetected the remainder of the jam at the point of its breakup. In thevicinity of Vainovo village (at the exit from the Kholmogory arms)the fall ice jam bridge was crushed by icebreakers.
The imagery of the Northern Dvinas delta showed steady freeze-upin the deltas arms and identied no ice dam sections in the arms.
Figure 3: Floodplain inundation along the River Malaya Northern Dvina. Image of RADARSAT-1 dated April26th 2012. The water level at Krasavino exceeds the norm by 272cm (704cm) (source: MDA, ScanEx RDC)
Figure 4: The beginning of the flood along the floodplain in the Kotlas region. Image of RADARSAT-1 dated April26th 2012. The water level at Kotlas exceeds the norm by 107cm (605cm) (source: MDA, ScanEx RDC)
Figure 5: Inundation of Dyabrino village in spring flood on the River Northern Dvina
-
12
Small ice dam formations were observed only at the exit from theKorabelny and Murmansky arms. The image clearly shows channelsin the fast ice that were used for ship trafc in ice across the port inthe Archangelsk area.
The image for the territory in the Northern Dvinas delta, received inJanuary 2012, served as a basis for prognostic conclusions on thelow probability of ice jam formation in the deltas arms in the springice drift period. The imagery showed that all ice release activitieswere completed fully by icebreakers, before the primary ice drift,without serious ooding in Archangelsk city.
The satellite images of the River Northern Dvina were used to detectmore fall ice dams than detected during the eld survey performedat the beginning of March. Thus, the eld survey failed to detect theice jam section in the region of Nizhniye Karyery (Orletsy) (Figure2) and along the principle channel in the region of Kotlas city. Thiswas mainly due to difcult conditions, which made it tricky to goonto the ice.
Specics of Ice Drift on the River Northern Dvina in Spring 2012The beginning of the preparation process for the break-up of therivers Sukhona and Yug was postponed due to low air temperaturesand a sudden increase in snow cover height after a prolonged scarci-ty during the entire winter period. In the second half of April theweather changed abruptly. Characteristics of the ice drift on theRiver Northern Dvina in spring 2012 were intensive formation tomaximum levels, simultaneously on all tributaries, caused by suddenwarming and snow cover disappearance, as well as by the high vol-ume of precipitation in the south of the territory.
The ice drift on the lateral rivers was fast, without jam stops andmaximum levels were caused by a combination of ice drift and oodwaves as a result of anomalously warm weather and a large vol-ume of precipitation, which exceeded the norm by 150 200cm.A delay in ice drift and ice drift wave passage, caused by ice jamson the River Northern Dvina in the area of Kotlas city and theKrasnoborks settlement, as well as the sudden arrival of a high oodwave from the rivers Sukhona, Luza, Yug and Vychegda, triggereda very rare phenomenon: the combination of the two waves andsuperimposition of the backwater wave led to a rapid increase in
the water level and inundation along almost the entire length of theRiver Northern Dvina. The most powerful inundations were observedin Kotlas city and Dyabrino village.
Compared to previous years, the ood of 2012 was distinguishedby the signicant excessive water levels, which were above the norm,and adverse marks and inundations on the prevailing part of theArchangelsk Region territory. The satellite images received on April26, 2012 (Figure 3 and 4) detected considerable increase in inun-dation area both in the oodplain of the River Malaya NorthernDvina and in the region of Kotlas city: the levels here exceeded theood start adverse mark of the temporary gauge station at Medvedkaby 720cm and at Kotlas by 660cm.
The Dyabrino settlement was also included in the zone of seriousinundation, even though the last ood was observed there in 1995(Figure 5). Due to the speed with which the high ood developedalong the entire length of the River Northern Dvina, the passing oflevels and scale of inundation could be monitored by images pro-vided by ScanEx RDC on a daily basis only (Figure 6). The proce-dure for calculating the area of inundation developed in ScanExRDC allowed the assessment of that parameter depending on thechange in water level.
In the vicinity of the temporary gauge station at Telegovo, the waterlevel exceeded the norm by 180cm when an ice jam formed down-stream from the Krasnoborks settlement. The recurrence of such anice jam level was likely to be once every 14 years. The p probabili-ty of such an ice jam formation was calculated on the basis of earlyimageries performed by ScanEx RDC.
A powerful ice jam formed on the River Pinega in the region ofNizhyaya Palenga village and downstream Kuzomen settlement. Asa result of this backwater, the level at the Kuzomen temporary gaugestation reached the mark of 944 cm, exceeding the norm by 375cm. The last time such an extreme water level was observed herewas in 1998 (1,004 cm).
In the spring of 2012 oods with varying degrees of inundation ofsettlements, railroad spur, destruction of automobile roads, and rivercrossings were observed in 10 out of 19 administrative districts inthe Archangelsk Region. Owing to the fulllment of a full scope ofwork on ice release in the delta and estuary of the River NorthernDvina, the ice drift in Archangelsk city was of no concern and passedwithin normal levels, which had, indeed, been forecasted on thebasis of the rst images received from ScanEx RDC.
This information is valuable for municipal establishments in the prepa-ration of area inundation certicates and in order to calculate dam-age, as well as for Avtodor Company and its divisions, since satel-lite images clearly show all inundations and damage to local andregional automobile roads. The images demonstrate how the feder-al M8 road would appear with extensive oods and predicted waterlevels. Space imagery data may also be interesting for insuranceagencies due to its visual imagery and georeferencing.
E. N. Skripnik, Lead Oceanologist of River and Maritime Hydrological Forecast Group, FSBI NorthernTerritorial Administration for Hydrometeorological and Environmental Monitoring, 163020, 2 Mayakovskogo
Street, Arkhangelsk; e-mail: [email protected] source of this article and the article GeoPDF Based Services from Issue 2 of GeoInformatics,
is the magazine Earth from space - the most effective decisions, www.zikj.ru.
April/May 2013
Article
Figure 6: Inundation of local roads on the Yemetsk meadow during the spring flood of 2012. Image of EROS B dated on May 4th 2012. Water level at Yemetsk temporary gauge station 863cm.
(source: ImageSat, ScanEx RDC)
-
Join us: discovermore.leica-geosystems.com
Change is coming
-
14Interview
Recently, Safe Software released FME 2013 for Desktop and Server. The yearlyrelease holds many new features, and a number of them are discussed here withthe companys two founders,Don Murray and Dale Lutz. Of particular interestare point cloud data files, ZIP and URL support and the ability to process largevolumes of real-time data. By Eric van Rees
New File FormatsAs with all new releases of FME, the latestrelease from January this year has a numberof new le formats that are now supported,such as Socrata, Salesforce, SpatiaLite, andIngres. Don Murray: despite the fact that wealready have 300 of them, we keep continu-ing to support new le formats. Were nowmoving into supporting new cloud-based for-mats and systems, and Socrata is a greatexample of that. Socrata refers to a Seattle-based cloud software company, that isfocused exclusively on democratizing accessto government data. Dale Lutz: Socrata is adata sharing service thats used by a numberof cities in North America, such as Edmontonand San Francisco, as well as the federal gov-ernment at data.gov.
Salesforce, another cloud format that is nowsupported by FME, is a CRM (customer rela-tionship management) system that is used bySafe Software themselves to track the locationand origins of its customers. Lutz: weve evenbeen using our ability to read out where ourcustomers are and put it on a map to help usplan where we would going to do the FMEWorld Tour, that is planned in nearly 50 citiesaround the globe between April and June.Ingres is an open source database with addedspatial capabilities. Safe Software workedwith Actian (the company behind Ingres) toadd the ability to read and write to Ingres,including spatial types, to the latest FME.
Point cloud supportNew in FME 2013 is the easier manipulationof point cloud datasets. This means there arenew point cloud transformer tools that enablelarge point cloud datasets to be consumed,
analyzed, and ltered based on users criteriato extract the required information. New 3Dtransformation tools provide additional waysto manipulate and combine data so that out-put data produces more realistic models in 3Dvisualization applications.
The new release supports a number of newpoint cloud formats. Most of the formats arevendor-based (Riegl, Z+F, Leica), but one isnt.It is E57, a standard for storing 3D point data,produced by 3D imaging systems. The stan-dard was created by a standards organiza-tion called ASTM, the American Society forTesting and Materials.
Dale Lutz: some of the latest incarnationsof the standard E57 allow a very exibledata model for point clouds. Theres nowan interesting trend happening, sincethese standards are forcing us to gen-eralize our point cloud support, inparticular in terms of things that userscan do. In FME 2013, we made thefoundation for what are basicallyarbitrarily structured point clouds,where each point can have not justthe traditional ve or six measure-ments, but maybe twelve. And nowwhat you do when you have less mea-surements, you have to decide whichones do you keep and how do yourename them. These are things wehave to cope with this in the presenceof high data volumes.
Safe Software also added the ability tomap within a point cloud. Lutz: so
almost like you have raster maps or a rasterthat goes pixel by pixel, we added the samething on a point cloud that goes point to point.An example of this that is visually very effec-tive is an instant ood simulation that instantlylooks across all the points of the point cloud,and colors blue any point lower than some ele-vation threshold, all done in a split second onmillions of points.
P o i n t C l o u d D a t a M a n i p u l a t i o n a n d M u c h M o r e
April/May 2013
Don Murray (left) and Dale Lutz (right)
-
15
Latest News? Visit www.geoinformatics.com
ZIP and URL supportAll of FMEs le-based readers now supportzip les and URLs in addition to les, andall the le-based writers can output directlyto zip. The bigger thing behind this was justthat data is more and more living out on theweb and the cloud. Murray: the internet isnow an extension of the local le systemwith FME 2013. If theres a data sharing sitethat has data sitting on it, you can just pointat it and use it. You dont have to take theadditional step of downloading the dataand unzipping it locally. All this will happenautomatically.
That sounds like a small thing, but now FMEusers dont have to periodically downloadthird-party data anymore to make sure theyhave the latest data, says Murray: by onlypointing to the http address in the .zip le,youll always be running your workspaceagainst the latest and greatest data. Whensharing Shapeles, its just so convenientbecause youre almost always zipping these
up and going to share them with somebody,which now happens automatically.
Does this mean that downloading data willbecome obsolete at one point now that theinternet can be used as a local le system,combined with ZIP support? Lutz: I do thinkthat for many users, the idea of download-ing data will become an obsolete idea.Because, why go through all those extrasteps such as downloading and unzippingdata, if you can just point at it and alwaysget the freshest version. You dont need tomake a local copy to make use of it in yourworkows. I think this is a big step forwardto many people. Looking forward, you couldbe imagining that well be doing the sameon the writing side too, talking about FMEServer.
Processing real-time data with FMEServerSensors are now collecting more and moredata, the question is how FME Server han-
dles processing real-time data. Murrayexplains the two different approaches,based on the amount of data to process:First, we have a solution for periodicupdates. This could be a water level sensorthat periodically sends its information toFME Server. A workspace is run when thatdata package comes into the server, and theworkspace determines what to do based onthe data it is sent. It can do anything suchas update a database or in the event of pos-sible ooding it could push messages tousers through email, SMS, or to a mobileapplication.
The second real-time data mode is datastreaming that is capable of handling hugenumbers of messages a second. For exam-ple, data of about 40,000 records per sec-ond. In this mode, one or more FME enginesrunning a workspace(s) are dedicated toprocessing the information as it comes in,and again can do things like updatedatabases, perform spatial joins to see if aparticular condition has arisen, and will alsoraise notications when a particular condi-tion arises.
Here, things are different than in past ver-sions of FME Server. Murray: in FME 2012we had no way of handling high volumereal-time events. With this new support weare able to do things like plug into technolo-gies such as the Java Messaging Service(JMS). With this we have enabled severalorganizations to add spatial capabilities tothe enterprise. There are some very interest-ing solutions already being deployed thatleverage the FME Servers high data volumecapabilities. Some of these solutions will bepresented on our world tour later this year.
For more information, see www.safe.com/fme2013Key Functionality Updates in FME 2013:
http://evangelism.safe.com/fmeevangelist112
This diagram shows the flow of information through FME Servers Notification Service
This Point Cloud image shows a before (right half) and after (left half) view of a transformation done by FME
-
16Column
Geofencing offers some fascinating opportunities to leverage furthermobile technology, says columnist Matt Sheehan.
Geofencing is a new, and much discussed mobiletechnology. As Wikipedia denes:A geofence is a virtual perimeter for a real-worldgeographic area.In February, the US based technology market intelli-gence company ABI Research, estimated that themarket for geofencing could reach $300 million by2017. Much of the discussion around geofencingrelates to geomarketing; or inuencing consumerbehaviour as they move through space. Thus, a driv-er entering a zone or buffer within a xed distanceof a store, might trigger an SMS text message to asmartphone notifying thedriver of a sale. Geo-fencingprovides a notication ser-vice to mobile users basedon location; it can also beused for real time locationtracking, and provides aninsight into user behaviour.Geofencing also has impor-tant potential applications in the mobile GIS world.The recent purchase of the Portland, Oregon basedGeoloqi by Esri brings together a marriage of thesetechnologies. As discussed previously in this column,mobile technology opens new possibilities for theapplication of GIS. We are in a time of innovationand opportunity. The Geoloqi team is currently working hard inte-grating their technology into Esris ArcGIS Onlinemapping platform. Their technology has someunique features, notably preserving battery life. GPSis a notorious battery drain on mobile devices.Continually checking location and communicatingthat information back to a server - Im at this loca-tion, am I within a geofence? - will quickly requirebattery recharging. Geoloqi have a unique algo-rithm within their software which ensures a geofenc-ing app built with their tools can run all day in thebackground without signicant battery drain.Some interesting conversations have begun aroundmobile GIS and the applications of geofencing; intel-ligent features and location tracking for environmen-tal protection are two such conversations.
Intelligent FeaturesMobile presents new possibilities for eld workersto interact directly with GIS. In the US the variousState Departments of Transportations (DOTs) stillrely largely on pen and paper to record work donewhile on site. Having the ability to use maps on
tablets, and smartphones; to overlay layers of inter-est and query features will revolutionize current workpractices. Geofencing offers some fascinatingopportunities to leverage further mobile technology.Geotriggers actions triggered on entering, or leav-ing a zone can be used to create intelligent fea-tures. In the case of the US DOTs, eld crews spendmuch time inspecting features. Provided with a fea-ture list, their task is to locate each asset, conductthe required inspection procedures and complete areport form. Culverts - pipes for waste water whichcross under roads are one such feature asset.
Imagine if each culvert inneed of inspection had ageofence set within a xeddistance of its location.When eld crews drive overculverts requiring inspection,they are notied by text. Aninspection can then be con-ducted and results, maybe
including photos, recorded in a mobile app runningon a smartphone or tablet and communicated direct-ly back to head ofce.
Location Tracking for EnvironmentalProtection Geotriggers allow not only the tracking of entry anddeparture from a zone around a location or feature,but also dwell time. In the US fracking has becomea somewhat controversial technique used to releasepetroleum, and natural gas for extraction. Truckstransport water to well heads or fractures, which isthen used under pressure, to release these sub-stances. These trucks often sit for extended periodsin lines waiting to empty their tanks. With enginesusually on while waiting, this is a source of concernwith regards emissions. Various US agencies arepotentially interested in tracking these emissions andnding ways to mitigate the environmental impact.Initial discussions are under way into setting geotrig-gers around well head/fractures to collect data ondwell time. Truckers would be required to install abackground geotriggering application on theirsmartphones. This would track location and providedata on dwell times in these zones. Calculations canthen be done, using this data, to calculate emissions.Given this would be real time data; this technologyoffers the potential to better manage operations,including redirecting truckers to less busy locations.
Mobile GIS and GeoFencing
A geofence is a virtual
perimeter for a real-world
geographic area.
April/May 2013
Matt Sheehan is Principal and SeniorDeveloper at WebmapSolutions.
The company build location focusedmobile applications for GIS, mappingand location based services (LBS).
Matt can be reached [email protected].
-
18Article
The article provides an overview about Cloud computing; a technology which israpidly growing and spreading into our lives and will have significant consequences in the future. This is also the case with GIS technology, where anumber of decisions still have to be made about which services can be providedto the users, in addition to online basemaps (vector and raster). Meanwhile, Esrihas developed and is actively promoting ArcGIS Online.
By Luigi Colombo and
Barbara Marana
Cloud Computing andthe GIS World
IntroductionThe meaning of the words Cloud computing (Figure 1) comes fromthe information technology and refers to a combination of technolo-gies (Figure 2) which allow, according to a provider-user service,the recording, storing and/or the processing of data by way of soft-ware and hardware network resources (typically the Internet). In fact,this technology allows the user, connected with a cloud provider, toprocess, store and access software programs and data with nothingmore than a simple Internet browser. The cloud technology offers an excellent platform for GIS applica-tions. Recently there has been increasing interest in geospatial data
which, thanks to the ever more sophisticatedacquisition technologies, is now available inhuge quantities. In time, this information isexpected to grow and become extremelysought-after both for its management andorganization. The spatial analysis of hugedatasets is really complex and requires heavycomputational work. In order to share GISdata and its processing results amongst all theglobal users, it is easy to understand how aprocessing, scalable and low coast platform,
A Te c h n o l o g y O v e r v i e w
April/May 2013
Fig. 1 The Cloud (source: www.coburgbanks.co.uk/blog/cloud-computing-next-big-thin/)
Fig. 2 The Cloud computing technology (source: http://en.wikipedia.org/wiki/Cloud_computing)
-
19
Latest News? Visit www.geoinformatics.com
such as Cloud computing is becoming a must have for GIS appli-cations. Traditionally, GIS applications would require dedicated resources,but with Cloud computing, storage and processing requirements canbe assigned to a cloud provider. Although the cloud GIS infrastruc-ture is now available to everybody, it is still to be decided the exactform it will assume.
What is Cloud computing?As cloud computing is becoming increasingly popular, it is impor-tant to have a universally recognised denition. The best one seemsto be that published in October 2011 by the National Institute ofStandards and Technology (NIST). This denition is based on veessential characteristics, three service models and four deploymentmodels.
The essential characteristics are:Network access Cloud computing services can be accessedfrom a variety of networked devices, such as workstations, mobilephones, and other servers through Internet formats and protocols(Url, http, Ip, etc.). A GIS example is a geospatial information ser-vice accessible from browsers and other servers. On-demand self-service The service interfaces must be welldened and the answers, given by the provider to the user, com-pletely automated. The service must be ready to use and suitable forthe users needs without technological bonds. A GIS example is thepossibility to start multiple map servers with a browser interface.Resource pooling Cloud computing services share someresources such as processing power, storage, and input-output so asto provide economies of scale. IT resources are used with maximumefciency. The common hardware and software platforms allow theallocation of unused resources for other tasks or services. A GISexample is sharing computers owned and administered by Esri,Amazon, or Microsoft, without knowing or caring how these com-puters are supplied.Elasticity Cloud computing services can be scaled up and downautomatically and at high speed to meet requirements and todecrease wastefulness. While elasticity is a characteristic of sharedresources pools, scalability belongs to the underlying hardware andsoftware platform. A GIS example is processing a large spatial dataset quickly through many cloud computers, which are then discard-ed when the task is accomplished.
Measured service Cloud computing services are paid foraccording to the resources actually used, such as processing power,storage capacity, or the number of user accounts. A GIS example ispaying for a map server according to time and bandwidth, ratherthen for a whole computer.
The three service models are (Figures 3 and 4): Infrastructure as aservice (IaaS) which is the fundamental service, followed by Platformas a service (PaaS) andSoftware as a Service (SaaS). In the rst case shown in gure 3, i.e. the traditional computer-under-your-desk model, the user manages everything; moving to a cloudIaaS (Infrastructure as a Service) the provider manages all the com-puting hardware resources (CPU, RAM, Storage and network inter-face cards) and the user brings everything else. An example of thisis provided by Amazon EC2 (Elastic Compute Cloud)/S3 (SimpleStorage Service) IaaS service. As for the costs, it is a pay-for-what-you-use service, which means that one doesnt pay anything if itactually doesnt work and this can be extremely convenient. In aGIS context, this would mean that you rent computing power from acloud provider, and use it to solve GIS problems.
A PaaS (Cloud Platform as a Service) means that the vendor pro-vides a virtual software layer of software programs, libraries, etc.Usually it is an API (Application Programming Interface) packageuseful to develop applications. The user can still add his own dataand some software, but he is bound to the providers platform. APaaS example is provided by Google App Engine, a platform fordeveloping and hosting web applications managed by Google datacentres. In a GIS context, one could imagine running EsrisModelBuilder (which is integrated in ArcGIS Desktop and allowsone to simply perform data managing and processing without requir-ing any knowledge of programming techniques) in a webpage. SaaS (Software as a Service) allows the use of remote softwareand/or specic client applications through a common browser andis easy to understand. An example is provided by a simple webmailaccess and also by Google Maps; Esri ArcGIS Online is a typicalexample of a GIS SaaS.
The deployment models are (Figure 5):Private cloud The cloud infrastructure is provided for the exclu-sive use of a single organization comprising multiple consumers. Itmay be owned, managed, and operated by the organization, athird party, or some combination of them, and it may exist on or offpremises.
Fig. 3 The three service models (source: www.e-education.psu.edu/cloudGIS/cloud_introduction)
Fig. 4 The three models and their users (source: www.saasblogs.com/saas/demystifying-the-cloud-where-do-saas-paas-and-other-acronyms-fit-in)
-
20
Public cloud The cloud infrastructure is provided for open useby the general public. It may be owned, managed, and operatedby a business, academic, or government organization, or some com-bination of them. It exists on the premises of the cloud provider.Community cloud - The cloud infrastructure is provided for the exclu-sive use of a specic community of consumers from organizationswho have shared concerns and it can be compared to a subset ofpublic clouds especially created for a specic group, such as gov-ernmental, healthcare or nance. It may be owned, managed, andoperated by one or more of the organizations in the community, athird party, or some combination of them, and it may exist on or offpremises.
Hybrid cloud The cloud infrastructure is a composition of two ormore distinct cloud infrastructures (private, community, or public) thatremain unique entities, but are bound together by standardized orproprietary technology.
Cloud and GIS worldGoing back in time Google Earth can be considered a goodprimeval Cloud computing example since it covers the whole worldwith images from different data centres, which are all linked togeth-er, providing a highly interactive 3D visualization. Additionally, itsupplies many geographical tools (places research, itineraries cre-ation, etc.) and allows the single user to visualize what is alreadyavailable, but also to add new information which can be visualizedand shared with other users all over the planet.Cloud computing is currently one of the most challenging IT applica-tions and its use is on the increase in the GIS world; many innova-tions are now available for the users.
Autodesk has released a new service as part of Autodesk 360, calledAutodesk BIM 360. One of the new tools in BIM 360 is a ConceptualDesign and Feasibility Evaluation service, which enables users ofAutodesk Infrastructure Modeler (a three-dimensional GIS softwarewhich allows to build 3D Digital Cities in which is possible to setboth architectural and infrastructural preliminary projects) to pub-lish, store, and manage large models (Figure 6) in the Cloud. Userscan invite other team members to access, download, and edit sharedmodels.GIS Cloud is becoming quite popular, too. It is a Cloud computingSoftware as a Service for Web GIS which allows the use of dis-tributed hardware and software resources to perform online GIS ser-vices. It is also possible to create online architectural projects, toload, manage, edit, export raster and vector data in all the wellknown formats. All the loaded layers can be published and it is
granted a support to Openstreetmap, Google Maps, and similar ser-vices. Some simple GIS analysis and statistical tools are also avail-able and others will be added in the future.
Esri cloud offerWith effect from May 2012, Esri announced that it would be possi-ble for its clients, to purchase ArcGIS Server, a GIS software forservers, with an annual cloud subscription. This way, all the cus-tomers can use ArcGIS Server Cloud Bundle which works on AmazonElastic Compute Cloud (EC2) infrastructure, and they have at theirdisposal both Esri technical support and assistance; it is also possi-ble to simplify and reduce a server organization and management,to increase workloads, to raise or decrease the ArcGIS Serverrequests number without new hardware resources on the premises,whilst getting a reduction in the total amount of electricity.Users acquire fast access to the program and can promptly publishservices and support Web mapping applications. The access to theprogram is granted through licences on virtual machines providedby Amazon, instead of on computers physically existing on thepremises.
In perfect line with this direction, Esri, with the new ArcGIS 10.1release in June 2012 and the ArcGIS Online package, provides anew way by which users can manage and make available geo-graphic information inside organizations or for the Web community.This release made it possible with just a few mouse clicks, for ArcGISDesktop users to publish and coordinate ( with everybody and inthe most convenient way) their own geographic data, basemaps andprocessed information, through a large availability of analysis tools;this sharing is achieved via a local net, the Web, or through theadvantages provided by cloud architectures.ArcGIS Online (Figure 7) is a customizable Web-based system, pro-jected for all the experts who want to manage the geospatial con-tents of their applications with the aid of cloud tools and infrastruc-tures; it also allows an administrator supervision on data creationand access, providing easier availability to geographic informationinside a company structure and simplifying the coordination of allthe activities developed by different users.ArcGIS Online is now completely integrated: an easy to use portalfor thousands of operators, architects and experts all over the world.
All the companies can record and manage their basemaps, dataand other geospatial information through ArcGIS Online and inte-grate them with thousands of other shared and free maps, data sets,services and tools.
According to a SaaS service model, the user can access the avail-able resources without responsibilities for hardware and software or
April/May 2013
Article
Fig. 5 Cloud computing types (source: http://en.wikipedia.org/wiki/Cloud_computing)
Fig. 6 A city model (source: www.coins-global.com/usa/h/Solutions/Infrastructure/1377/?lang=)
-
21
Latest News? Visit www.geoinformatics.com
data infrastructure, since everything is managed by a provider, i.e.Esri.
Esri is continually updating the ArcGIS online contents, includingnew images, activities and services. This ensures that they provideall their users with the best GIS and cartographic products availablein the Web.Esri security strategy is based on each level and every user control,which makes it possible for ArcGIS Online to guarantee data con-dentiality, integrity and availability.
Data is available as web services and some interfaces allow theuser to manage them and interact with them.With ArcGIS Online it is possible to produce basemaps with dataavailable on the Esri website, but also with data from external serversor developed by users. In this case, however, the service shifts froma SaaS model to a PaaS one where data is managed mainly by theusers.
ArcGIS Online is very exible in order to ensure they can meet thesecurity requirements of companies and allow them to share infor-mation in a private or public way; so it is possible to keep controlof ones own data, while decreasing the infrastructure costs and pro-viding users and clients with easy to use Web contents.Esri has the task to safeguard the stored data and to allow Internetaccess from everywhere and anywhere for Web Desktop and mobileapplications, with permission from the data owner.
As a result of this approach, it is actually possible to nd 100,000base-maps, data and applications published by the GIS community.Access to ArcGIS Online is accomplished through a browser, mobileand visualization devices, and of course with ArcGIS Desktop.
Final remarksIt is important to stress the advantages of Cloud computing. Theseare virtual resources access through Internet, scalability and imple-mentation transparency (i.e. the services technical details are usual-ly of no importance for the nal users and the management of theunderlying infrastructure is performed by a provider). Any company
considering a cloud technology choice must reect carefully on allthe advantages and disadvantages.
The undeniable pros are: low operating costs, resources remoteaccess (which allows one to work from any location in the world),devices independence, decrease of hardware and software xedcosts, their management and the possibility to increase them simplyon demand.
The cons are: service continuity (data and processing depend onproviders and Internet connections) and information security. Withregard to security; it is has to be considered that data managed bya cloud provider are stored at a third party and so they are poten-tially exposed to theft and manipulation. To avoid these problems itis extremely important to think of which data should be stored in thecloud and how to protect it, both technically and legally.
The service continuity depends on the reliability of what is offeredby the provider and on the stability of the owner Internet connec-tion. In fact, a possible breakdown could block company activitieswith huge economic damage; this could also happen, of course, ifthe processing resources were inside a company, but the thought ofbeing unable to directly control the problem, if it were to arise, hasa negative psychological inuence and makes the problem seemeven worse. For this reason it is better to be contractually protectedor to provide an extra number of remote processing resources orInternet connections.
Furthermore, it is also important not to underestimate a certaindegree of resistance to change and the passiveness which stemsfrom cultural habits; the old saying: Dont change it if it isnt bro-ken, often delays, or even stops the employment of new technolo-gies.
The future of GIS is still an open issue and is continually evolving,despite a prevailing opinion that these systems were made to existin the cloud, where they can reach their highest potential. In fact, aGIS needs to perform spatial analysis, modelling and simulation; allfunctions which can be boosted and accelerated with the aid ofcloud technology.
A GIS can benet signicantly from the cloud, because it allowsgreater accessibility, faster organization, wider availability and eas-ier use. In this way the cloud revolution becomes quite an indispens-able technology for the government of cities of all shapes and sizes.Finally, it is important to reect on the words of the Esris Presidentand Founder Jack Dangermond: GIS is being exposed on the Web,through browsers and through mobile phones. Thats making it moreaccessible and usable. It will spread through whole new audiences.Executives who want to look at sophisticated geographic informa-tion and do sophisticated geographic analysis can do so through amobile device.
Luigi Colombo, [email protected], is a full professor of Geomatics at University of Bergamo, Italy.
Barbara Marana, [email protected], is an assistant professor in the field of Geomatics at University of Bergamo.
Many thanks to Gail Borio, Research Librarian at the National College of Business and Technology, Knoxville Tennessee, for her helpful language suggestions. For a fully annotated version
of this article, please refer to www.geoinformatics.com.Fig. 7 ArcGIS Online (source: http://resources.arcgis.com/en/help/getting-started/articles/026n0000000v000000.htm)
-
22Article
Located in northern Europe, snow cover in Pori lasts more than one-third of theentire year. Snowplowing operations in the city were managed in inefficientway, until GIS technology allowed for route optimization models, yielding savings in both time and fuel costs. By Jim Baumann
GIS Against Annual Snow Assault
John III, the Duke of Finland and son ofKing Gustav I of Sweden, founded Poriin the Grand Duchy of Finland in 1558.Located at the mouth of the Koke -menjoki River, the settlement was to
serve as a harbor and market town to revital-ize trade with continental Europe. Pori wasoriginally populated with approximately 300residents who relocated from the nearby townof Ulvila. The new city quickly became com-mercially successful, and Pori prospered as aregional center for commerce and shipbuild-ing.Today, Pori has nearly 84,000 residents whoenjoy a high standard of living. The city ishome to three universities, and the Pori JazzFestival is one of the best known music festi-vals in Europe.Located in northern Europe, snow cover in Porilasts more than one-third of the entire year.Snowstorms can start as early as October andlast into late April. During this time, city work-ers must keep 1,163 kilometers (723 miles)
of streets and 295 kilometers (184 miles) ofbicycle paths free of snow and ice.
Snowplowing operations in PoriPoris public works department is a longtimeuser of geographic information system (GIS)software, primarily for asset management andinfrastructure maintenance projects. However,snowplowing operations were traditionallymanaged on a large wall map that detailedthe citys service areas. Supervisors dis-patched drivers to plow streets and bicyclepaths in the service areas in the same waythey had been plowed for the past fewdecades. That is, the supervisors assigned thedrivers to successively plow and replow eacharea during the winter without any considera-tion about how the routes might be betterplanned and the snowplowing service opti-mized.The citys snowplow drivers just followed thesame procedures that they had in the past,said Pori GIS specialist Timo Widbom. It was-
nt efcient, and while most roads wereplowed regularly, some were plowed less fre-quently because of their location and theunavailability of specialized snowplows forparticular sections of roadway.In early 2012, Pori entered into an enterpriselicense agreement with Esri, which allowed thecity unlimited access to ArcGIS software and itsextensions, including ArcGIS Network Analyst.With greater access to GIS for city employees,Widbom teamed with Aki Kaapro, GIS analystat Esri Finland Oy, to build geoprocessing mod-els to facilitate snowplowing and provide accessto the geodatabase for those public worksemployees involved in snow clearance.First, they had to collect specic data on theexisting roads in the city. To do this, the entirecity was divided into approximately 800 grids,each measuring one square kilometer. All roadsand paths within each grid were then visuallyinspected and categorized. While the cityspavement department maintains the road net-work in its GIS, there was little information on
R o u t e O p t i m i z a t i o n M o d e l i n g i n F i n l a n d
April/May 2013
Location allocation optimized snow plowing zones for pedestrian walkways. Three examples of VRP solver optimized snow plowing routes on pedestrian streets.
-
street care classications, such as the amount ofaccumulated snow required on a specied road-way before it should be plowed. Street care clas-sications include a roads width and its topolo-gy, which can affect the snow buildup and theway that the road is plowed. It took more thana year to collect all the required data.The data collection process took us some timebecause we carefully inspected and collecteddata on all the roads and pathways in eachgrid, as it was critical to the development of ourgeoprocessing models, added Widbom. Thecollected data allows us to determine when andhow a roadway should be plowed and the typeof vehicle that we should use. For example, weuse small plows for our bike paths, but our larg-er roadways sometimes require two plows usedsimultaneously.
Geoprocessing modelsWhen the categorization of the citys roads andbike paths was complete, Kaapro began todevelop the two geoprocessing models. One
determines the optimal snowplowing areas, andthe other optimizes the routes to and throughthose areas. The models use a number of fac-tors including the data previously collected inthe inspection of the citys streets and bike paths,street maintenance priority classications, thetype of snowplow vehicle required, and the totalnumber of areas to plow. The rst model usesthe Location Allocation tool in Network Analystto create demand points on those areas wheresnowplow service is required. After the demandpoints have been determined, the second modeluses the Network Analyst VRP Solver to nd theoptimal routes to service and plow them. Themodel also allows multipoint routing and routereordering.Time stamps are calculated for each section ofan optimized route to provide us with informa-tion about the length of time it takes to plow aspecied road section and allow us to facilitatean animation of that section, said Kaapro.Supervisors can then enable the Time Sliderwindow in ArcMap and discuss the routes with
their drivers via the route animation. In addition,there are the conventional means to examinethe routes via maps, driving directions, and soon. The main goal is to get the optimized routesto the drivers mobile navigators.
Widbom has received a positive response fromthe drivers and their supervisors in the Pori pub-lic works department and plans to expand theimplementation of the models results during thisyears winter season. In the future, he would liketo make the citys geodatabase available onsmartphones so that the drivers can interact withthe routing assignments from the eld andreview route history, if needed.Our route optimization models will allow us toreduce the overall number of kilometers drivenby each snowplow driver while increasing thenumber of roads each plows, said Widbom.This provides us with a savings in both timeand fuel costs.
Jim Baumann, Esri Writer.
23
Latest News? Visit www.geoinformatics.com
-
24Article
April/May 2013
Exelis VIS will be releasing service packs for its main image processing productENVI, as well as ENVI LiDAR, its new product for extracting 3D features fromLiDAR data. Besides that, the company is testing and releasing its first to market cloud offering, ENVI Services Engine. By Eric van Rees
Exelis VIS has been working hard on a number of new prod-ucts. Incremental releases, but also major releases and aproduct rebrand. They are discussed below by Beau Legeer,VP of Product Marketing at Exelis Visual Information Solution(VIS). Of interest are a new cloud-based solution, LiDAR
analysis software and mobile clients.
ENVI Services EngineThe ENVI platform now comprises an entire suite of geospatial toolsthat are based on analytics and driving information out of geospatialdata using advanced techniques. That platform manages traditionaldata like that which ENVI has always taken care of, such as spectral,hyper-spectral and multispectral spatial data, but also emerging modal-ities, such as LiDAR, SAR, and in the future, plans for full motion video.At the moment, Exelis VIS is really focusing on deploying their rstrelease of its cloud-based platform, the ENVI Services Engine early thisyear. Legeer: the concept of the platform now is being able to provideanalytics in a desktop application such as ENVIs LiDAR and SAR solu-tion, but also take all these analytics and move them to an enterprise.This could be a cloud put up by a personal enterprise, a governmentagency, or by a research or academic institution. Currently, test versions are being elded and tested by some earlyadopters in the US government and some other agencies and integra-tors that support the US government. Legeer: were not planning onstanding up our own hosting systems for this - weve built the productto t into other enterprises and other cloud based systems and to attachto products like ArcGIS Server specically. The system works throughsimple open standards based APIs and could be plugged into a pri-vate cloud, a public cloud, a private enterprise class system or any type
of middleware that a customer, a system integrator orany other type of user would want to provide analyt-ics on demand from ENVI.
ENVI LiDARIn September 2012, Exelis VIS released a service pack for ENVI 5,and one for ENVI LiDAR, ENVIs interactive geospatial software envi-ronment for analyzing and extracting 3D features from LiDAR data.Legeer: we decided to actually make a full release of the LiDAR prod-uct because we thought necessary given the level of development andchanges we put in there, especially considering the addition of an APIwhich makes the product fully extendable to custom needs. The company is now going forward with the second service pack ofENVI 5, which was released in January. And at the same time, theproduct formerly known as E3De was changed to ENVI LiDAR. Legeer:our goal here is x minor issues on a regular basis, and to add moreanalytics and capabilities to that platform, even between major releas-es and not wait for yearly big releases in order to get those valuablecapabilities out to the marketplace.
Time-enabled analyticsLegeer: since we are realizing that people are really getting data overtime, we now want to support that with as many of our tools as wecan. Now were adding it into our main ENVI product. It will be partof the service pack of ENVI 5, headed towards the next major releaseof ENVI, where we will support time metadata, the import of time-baseddata and some analysis. Exelis VIS at the moment offers tools across the other modalities thatare already time-aware, such its SAR tools, that are using data withmultiple collects over time. Legeer: this is part of a normal SAR work-ow to map things such as surface displacements and some micro shiftsin the earth. In general, we have always done time-based analysisthrough change detection. We have a very robust change detection
P r o d u c t N e w s a n d U p d a t e s
ENVI Services Engine is a cloud-based image analysis solutions that allows yourorganization to create, publish, and deploy advanced ENVI image and data analyt-ics to virtually any existing enterprise infrastructure.
-
25
Latest News? Visit www.geoinformatics.com
mechanism that we can normalize imageryover time using the image registration andextract the relevant pieces of change in vari-ous forms.
Mobile clientsIn the mobile area, there are some thingsgoing on as well. The rst thing is that throughthe ENVI Services engine, users can plug intomultiple enterprises. That can include enter-prises like the Esri ArcGIS Server Enterprise,which provides a wealth of mobile clients.Legeer: thats one area where were focus-ing and where we hope to bring some tech-nology forward in combination with Esri, sothat we would use their very strong mobileclient platform that talks to their server andour analytics are being used on their server.Exelis VIS is also working to build some of itsown mobile technology through its servicesgroup such as .jpeg or .jpeg2000 streams,delivering imagery to a mobile client over lowbandwidth. Legeer: now, were building uptechnology to try to take that to the next gen-eration and support streaming of jpg2000 tomobile clients. We hope to have an offeringfor this in 2013. Its a very exciting technolo-gy.
UAV data and Full-motion VideoThe company can do well with UAV platformsand get it prepared for analysis, as well asperform analysis, says Legeer: a lot of cus-tomers and a lot of people across the indus-try look to software packages like ours thatare off the shelf as a tool that can do a lot ofthe heavy lifting with those UAV payloadswhen it comes to imagery and because of theexotic data types that they put on there. Wecan take that data in and we have a widesuite of tools to do various corrections, ortho-corrections and calibration.When it comes to full motion video, this isoften slow on UAVs. Legeer: for this, we relyheavily on an offering called Jagwire, whichis a management system specically tailoredto full motion video and its owing on theseUAV type of platforms. Its a very completeplatform for FMV analysis storage, catalogingand dissemination: it takes the full-motionvideo from UAV platforms, stores it andallows customers to access it, play it back,view it and do searches based on the time-based metadata or the location-based meta-data.
Internet: www.exelisvis.com
ENVI LiDAR is part of theENVI Platform and enables
users to create powerful, real-istic 3D visualizations and
easily extract important fea-tures and products fromLiDAR point cloud data.
For Success in Todays Wild World, You Need to be Productive
FOCUS 30: Simply Powerful
For Success in T
s Wild World,odayFor Success in T
s Wild World,
For Success in Tou Need to be ProductiveY
s Wild World,odayFor Success in Tou Need to be Productive
s Wild World,ou Need to be Productive
COn Foisicera Prtcepe ShT mn iniosicer pdn aycarucca
g onnikcr loaey brgnue a hkiLd wnm asrie pho tts onehctal
n Levord pnd aetsure thon t.gy lonal dly aleivtcudorp
cera Prtceph Stid wenbiomCdrlos wreffm oetsyg sniyevrus
s et i, ingised denilmaertd sna
n poitatl satoc titobos a r0 iS 3UC.entemrusae m
onmlag snitraf a dh osae ho ttg onidone chr tettao m. Not get lond w
oGNkcon L o ky tgloonhceg tnikcar t
h, terawtfod sleo ry Pevruion Ssicegakca. Pytiivtcudord ples salc-dguod tn, aebladroff, aesu-o-tysas e
, edeph sging hidivorn p
0 S 3UCOe Fh, tony len rau co, ysiontg nikrou wop yeeo k
citobo0 rS 3UCOe Fh,keel, snredon a md ie
.hg
p. Sdevreses rthgil rl. Adetimin Loitagiave Nlbmir, T3102min Loitagiave Nlbmirf Tk oramedars a tn ioisicera PrtcepSedare tro ary Pevru, SSUCO. Fseirtnuor cehtn od ie ancfo
arr tehtl ol. Adetimin Loitagiave Nlbmirf Ts okramedare tra
ewoy Plpmi: S0S 3UCOFAMERICAS
Spectra Precision Divisionestmoor Drive, Suite #10010355 W
, CO 80021, USA estminsterW
+1-720-587-4700 Phoneoll Free in USA)888-477-7516 (T Toll Free in USA)
. detimin Loitagiave Nlbmirf Tn ooisivis a Dn ioisicera Prtcepk ramedard Tt annetas Petatd Setine Uhn td ieretsige, rdetim
o GNkcod Lk ancoLoe, GevirDpet. Snoisicera Prtcepf Ss okrame.srenwe ovitcepser riehf ty otrepore phe trs akramed
lufreEUROPE, MIDDLE EAST AND AFRICA
Spectra Precision DivisionRue Thomas EdisonZAC de la Fleuriaye - BP 6043344474 Carquefou (Nantes), France
+33 (0)2 28 09 38 00 Phone
ACIFICASIA-P
Spectra Precision Division80 Marine Parade Road#22-06, Parkway ParadeSingapore 449269, Singapore
+65-6348-2212 Phone
-
26Article
The article outlines the development and the main features of the verylightweight small-format digital frame cameras that have been designed andproduced by Tetracam for the acquisition of false-colour and multi-spectral photography from both manned and unmanned airborne platforms. By Gordon Petrie
Tetracams Range of Airborne ProductsI Introduction & Background.When I rst contributed an overview of airborne digital framecameras for GEOInformatics magazine in its issue for Octo -ber/November 2003, it included a quite short account of the small-format cameras that were being made by the Tetracam company,which is based in Chatsworth, California, U.S.A. Later, in 2006, Iincluded the companys cameras in an overview paper that was pre-sented at an ISPRS conference held in Paris. Now, ten years afterrst mentioning them, the companys camera designs have devel-oped substantially further in terms of their technology, while, at thesame time, its product range has expanded considerably. So it isinteresting to once again review the companys current range ofproducts in some more detail.
Although many small-format airborne digital camera systems simplymake use of the professional cameras that are manufactured bymajor commercial suppliers such as Canon and Nikon, Tetracam isdistinctly different in that its cameras have been designed and builtin-house specically for airborne applications. Furthermore, original-ly the companys cameras were designed expressly for agricultur-al monitoring applications and were used mainly by farmers,crop consultants, agronomists, etc. While this has remained animportant market for the company, its range of markets has increasedmarkedly. In particular, it is one of the few manufacturers and sup-pliers of lightweight airborne multi-spectral camera systems thatcan be tted to small manned and unmanned aircraft. The compa-nys development and short-run production facilities are located inChatsworth, California and Gainesville, Florida. They are comple-mented by high-volume, low-cost manufacturing operations locatedin Hong Kong and in Shenzhen, China.
II ADC Camera SeriesThe most basic model of single-lens small-format camera that hasbeen produced by Tetracam ever since the company was establishedin the year 2000, has always been its ADC (Agricultural DigitalCamera). In its original form [Fig. 1(a)], it featured a MotorolaCMOS area array that generated a 1,280 x 1,020 pixels = 1.3Megapixel image. This CMOS array was equipped with a Bayermosaic lter that produced its images in the red (R), green (G) andnear infra-red (NIR) parts of the spectrum. The resulting false-colour images could be viewed directly in the aircraft on a tinyscreen that was tted to the back of the camera [Fig. 1(b)], whilethe digital data was stored on a compact ash card. The camera
was also equipped with (i) a USB port to allow it to be connectedto a laptop computer; and (ii) a serial port that gave a connectionto a GPS receiver. The body of this very small battery-operated cam-era measured 5.5 x 3 x 2 inches (14 x 7.5 x 5 cm) without the lens,while its weight was a mere 1 lb (0.5 kg).
By 2006, the ADC camera had been re-designed and featured aCMOS chip from OmniVision that could generate false-colour (R, G,NIR) images that were 2,048 x 1,536 pixels = 3.2 Megapixels insize, with each pixel being 3 m in size. Currently, in 2013, theADC range comprises ve different models. These are labelled as
C a m e r a s & U AV s f o r A g r i c u l t u r e , F o r e s t r y & V e g e t a t i o n A p p l i c a t i o n s
April/May 2013
Fig. 1 (a) An early model of the Tetracam ADC camera, as seen looking towards the top and the front ofthe camera. (b) The ADC camera featured a colour LCD viewfinder and display fitted to the back of the cam-
era. (Source: Tetracam)
[a]
[b]
-
27
Latest News? Visit www.geoinformatics.com
(a) the ADC; (b) the ADC Air; (c) the ADC Lite; (d) the ADC Micro;and (e) the ADC FX models respectively.
(a) The current model of the ADC camera [Fig. 2(a)] retains the 3.2Megapixel CMOS array with its red, green and near infra-red (R,G, NIR) sensitivity. The camera is supplied with a standard CS mountthat is compatible with a wide range of lenses; the standard lenssupplied by Tetracam has a focal length (f) of 8.43 mm. The exposedimage can still be inspected on the built-in LCD display on the backof the camera [Fig. 2(b)]. Storage is provided by a 2GB certiedCF card. However the size of the current ADC model has beenreduced still further to measure 4.8 x 3.0 x 1.6 inches (12.2 x 7.6x 4.1 cm) without lens. Furthermore it has been lightened to weigh12 ounces (340 grams) without internal batteries - when power isbeing supplied by an external 12 volt DC source - or 18 ounces(520 grams), when equipped with eight AA-sized alkaline batteries.Essentially this camera is intended primarily for use as a hand-held terrestrial camera, designed for the ground monitoring ofcrop canopies and vegetation although it can, of course, be usedfor airborne operations.
(b) The ADC Air model has been re-engineered, ruggedized andweather-proofed (including a screw-on lens hood) in order to with-stand the harsh environments that may be encountered in airborneuse e.g. when the camera may be mounted externally on a lightaircraft [Fig. 3] or when placed on terrestrial platforms ortowers that are exposed to the weather. The image format-size,spectral coverage, lens and the image storage capabilities of theADC Air model are similar to those of the ADC model. Howeverpower is supplied from a 12 V DC external source that is providedwith the camera, rather than batteries. Furthermore there is no LCDdisplay screen on the back plate of this particular model. The cam-eras dimensions are 5.4 x 3.5 x 3.2 inches (13.7 x 9.0 x 8.0 cm)with its lens hood in place, while its weight is 22 ounces (630 grams)without its multi-I/O cable.
(c) The ADC Lite model is alightweight version of the ADCAir Camera [Fig. 4]. Thismodels light weight 7 ounces= 200 grams, which includesthat of the lens is intended forthose airborne applications inwhich weight is a critical factor.In particular, it is aimed at thoselightweight UAVs (unman -ned aerial vehicles).that canonly carry a small payload. Again the image format-size, spectralcoverage, lens and image storage capabilities are similar to thoseof the previous two models.
(d) The ADC Micro [Fig. 5] is a still lighter weight (3.2 ounces =90 grams) model in the ADC series with a very low power con-sumption, which is intended for use in very lightweight UAVs.The specication of the image format-size and spectral characteris-tics of the images and those of the camera lens and the image stor-age capacity are again similar to those of the preceding models inthe ADC series.
(e) The ADC FX (Filter Expe ri -men tation) model is designedexpressly to correlate specicwavelengths in the visible andNIR parts of the spectrum withparticular plants; with plant orsoil conditions; or even withcertain chemical compounds orplant canopy chemistry. Thecamera is identical in appear-ance to that of a standard ADC camera [Fig. 6].However it differsfrom the standard ADC model in that it is tted with a single SXGA(1,280 x 1,024 pixels = 1.3 Megapixel) CMOS imaging array which is identical to the area arrays that are used in Tetracams cur-rent Mini-MCA multi-spectral cameras that will be discussed below.The incoming radiation from the ground passes through the spe-cific optical filter that has been selected by the user before beingfocussed by the lens to be imaged on the CMOS array. Thus essen-tially it generates a full-resolution monochromatic image at the select-ed wavelength. Thus it does not use a Bayer mosaic lter, nor isthere the need for a subsequent interpolation of the spectral valuesfor each pixel as is required with the Bayer lter. Selection and t-ting of this specic lter can take place in the eld.
Fig. 2 (a) The current model of the Tetracam ADC camera as seen from the front. (b) The ADC camera,as viewed from the back, showing the enlarged LCD display, which now includes a small side panel showing
the camera status. (Source: Tetracam)
Fig. 4 The very lightweight ADC Lite airborne camera. (Source: Tetracam)
Fig. 5 (a) The ADC Micro ultra-lightweight airborne camera as seen from the back. (b) The ADC Microas seen from the front showing the opening cut in the front plate for the lens. (Source: Tetracam)
Fig. 6 An ADC-FX camera at left, with its box of nar-row-band filters at right. (Source: Tetracam)
[a]
[b]
[b][a]
[a]
[b]
Fig. 3 (a) The ADC Air model as seen from the front, with its protective lens hood unattached at right.(b) The ADC Air model as seen from the side, showing its connector sockets and with its lens hood in place
over the camera lens. (Source: Tetracam)
-
28Article
Currently, Tetracam supplies four narrow-band optical filters with coverage in the red, green, blue and NIR bands as standarditems with the purchase of any ADC-FX camera.However customerscan specify (and pay for) additional optical lters within the wave-length range from = 450 nm in the visible part of the spectrum to = 1,050 nm in the near-infrared (NIR) part of the spectrum.Obviously the ADC-FX system may be used as a test bed for evalu-ating individual narrow band lters and their impact on vegetationindices or on their ability to discriminate particular types of vegeta-tion or to accentuate the presence of specic compounds in the result-ing image.
III MCA Camera SeriesLike the ADC series, the MCA (Multiple Camera Array) series ofmulti-spectral cameras has been steadily developed throughsuccessive generations up till the models that are currently beingoffered by Tetracam. Originally the MCA camera comprised fourindividual cameras that were tted together in a block in the typicalpattern of multi-spectral cameras. Each camera was tted with (i) aVGA (640 x 480 pixels = 0.3 Megapixel) CMOS imaging array;and (ii) the appropriate lter to produce grey-scale images in thered, green, blue and near infra-red parts of the spectrum respective-ly. When combined together, they could produce either true-colouror various types of false-colour image. Later models were thenproduced with a greater number of channels (cameras), each ofwhich would generate larger-format multi-spectral images.
(a) In its later form, the MCA camera typically comprised an inte-grated block of four or six cameras, with each being tted with anSXGA (1,280 x 1,024 pixels = 1.3 Megapixels) CMOS imagingarray. Each channel was also tted with the appropriate (different)lter in order to produce the RGB + NIR combination of images asbefore. The four-channel MCA4 version [Fig. 7] was 7 x 6 x 4 inch-es (17.9 x 15.3 x 10.1 cm) in size without lenses and weighed 4pounds (1.8 kg). The six-channel MCA6 version was 8 x 7 x 4 inch-es (20.3 x 17.9 x 10.1 cm) in size and weighed 2.85 kg. The bodycontaining the block of cameras was then tted with the appropriateset of four or six identical lenses, one for each channel, to providethe capability of focussing the incoming radiation reected from theground. The array of lenses and the set of individual optical lterscould be interchanged by the user as required.
(b) Currently Tetracam is placing most emphasis within the multi-spectral side of its activities on its lightweight Mini-MCA camera,which is available either in four, six or twelve channel forms [Fig.8(a)]. These cameras are designed specically for operation onlightweight UAVs. The dimensions of the six-channel Mini-MGA-6
model [Fig. 8(c)] are 4.52 x 3.07 x 3.14 inches (11.5 x 7.8 x 8.0cm), while its weight is 1.6 pounds (630 grams) with its lensesalready tted.Each of the component cameras in the Mini-MCA system has a nar-row-band lter, the particular set of lters being selected by the cus-tomer at the time when the order is placed [Fig. 9]. The lters canbe changed later in the eld by the user. However there are somelimitations to doing so principally that, during manufacture, eachcamera has been set up in the factory for optimum focus based onthe wavelengths of the specic lters that have initially been select-
ed by the user. So users are advised by Tetracam that they shouldonly replace a Mini-MCA lter by one that is near the wavelengthof the lter that was originally tted into that camera.In the visiblepart of the spectrum, the wavelengths of a new lter should be with-in plus or minus 100 nm of the original value. In the near infra-red (NIR) part of the spectrum ( >700 nm), replacement ltersshould be within plus or minus 50 nm of the original wavelength.Thereplacement of lters lying
April/May 2013
Fig. 7 (a) An MCA4 four-channel multi-spectral camera with its lens array detached and sitting to the leftof the camera. (b) The MCA4 camera with its attached four-lens array pointing upwards. (Source: Tetracam)
Fig. 8 (a) A block diagram showing the overall concept and arrangement of the four, six and twelvechannel Mini-MCA cameras. (b) A four-channel Mini-MCA4 multi-spectral camera with the filters placed over the lenses. (c) A recent example of a six-channel Mini-MCA6 camera in which the filters have
been placed behind the lenses. (Source:Tetracam)
Fig. 9 A diagram showing the spectral coverage of a six-channel Mini-MCA6 multi-spectral camera that has beenproduced by the particular set of six narrow-band filters that have been chosen by the user. (Source: Tetracam)
Fig. 10 A diagram of the Incident LightSensor (ILS) which is an optional
attachment to a Mini-MCA6 multi-spectralcamera. The ILS device displaces one ofthe six imaging channels of the camera;thus only five channels are imaging the
terrain. (Source: Tetracam)
[a] [b]
[b]
[c]
[a]
-
29
Latest News? Visit www.geoinformatics.com
beyond this range requires factory re-focusing of the unit.Looking to the future, Tetracam is developing a thermal-IR imagerthat operates in the LWIR (8 to 14 m) part of the spectrum and fea-tures a 320 x 240 pixel array employing uncooled micro-bolometertechnology. It is planned to be available for sale as an optional chan-nel on the Mini-MCA camera later this year (2013). Another Mini-MCA option that is already available is the Incident Light Sensor(ILS). This comprises a set of lters that match those on the Mini-MCAcamera and are placed over the ends of a bre-optic bundle [Fig.10]. This transmits the incident radiation to an array of measuringsensors that measures the radiation in each spectral band, thus allow-ing a comparison of the incident radiation values with the reectedradiation values being measured by each of the multiple cameras of
the Mini-MCA at the instant of capture of each image.IV


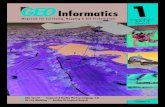




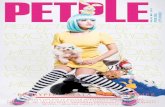



![[Lanove-CCF] Sword Art Online Vol03 Cap03.pdf](https://static.fdocuments.in/doc/165x107/577cd6ee1a28ab9e789d985b/lanove-ccf-sword-art-online-vol03-cap03pdf.jpg)