GEOGG121: Methods Differential Equations, MC etcmdisney/teaching/GEOGG121/diff/diff_eq1.pdf ·...
52
GEOGG121: Methods Differential Equations, MC etc Dr. Mathias (Mat) Disney UCL Geography Office: 113, Pearson Building Tel: 7670 0592 Email: [email protected] www.geog.ucl.ac.uk/~mdisney
Transcript of GEOGG121: Methods Differential Equations, MC etcmdisney/teaching/GEOGG121/diff/diff_eq1.pdf ·...

GEOGG121: MethodsDifferential Equations, MC etcDr. Mathias (Mat) DisneyUCL GeographyOffice: 113, Pearson BuildingTel: 7670 0592Email: [email protected]/~mdisney

• Differential equations– Introduction & importance– Types of DE
• Examples• Solving ODEs
– Analytical methods• General solution, particular solutions• Separation of variables, integrating factors, linear operators
– Numerical methods• Euler, Runge-Kutta
Lecture outline

• TextbooksThese are good UG textbooks that have WAY more detail than we need– Boas, M. L., 1985 (2nd ed) Mathematical Methods in the Physical Sciences, Wiley, 793pp.– Riley, K. F., M. Hobson & S. Bence (2006) Mathematical Methods for Physics &
Engineering, 3rd ed., CUP.– Croft, A., Davison, R. & Hargreaves, M. (1996) Engineering Mathematics, 2nd ed., Addison
Wesley.
• Methods, applications– Wainwright, J. and M. Mulligan (eds, 2004) Environmental Modelling: Finding Simplicity in
Complexity, J. Wiley and Sons, Chichester. Lots of examples particularly hydrology, soils, veg, climate. Useful intro. ch 1 on models and methods
– Campbell, G. S. and J. Norman (1998) An Introduction to Environmental Biophysics, Springer NY, 2nd ed. Excellent on applications eg Beer’s Law, heat transport etc.
– Monteith, J. L. and M. H. Unsworth (1990) Principles of Environmental Physics, Edward Arnold. Small, but wide-ranging and superbly written.
• Links– http://www.math.ust.hk/~machas/differential-equations.pdf– http://www.physics.ohio-state.edu/~physedu/mapletutorial/tutorials/diff_eqs/intro.html
Reading material

• What is a differential equation?– General 1st order DEs
– 1st case t is independent variable, x is dependent variable– 2nd case, x is independent variable, y dependent
• Extremely important – Equation relating rate of change of something (y) wrt to
something else (x)– Any dynamic system (undergoing change) may be amenable to
description by differential equations– Being able to formulate & solve is incredibly powerful
Introduction
dydx
= f y, x( )dxdt= f x, t( )

• Velocity– Change of distance x with time t i.e.
• Acceleration– Change of v with t i.e.
• Newton’s 2nd law– Net force on a particle = rate of change of linear momentum (m
constant so…
• Harmonic oscillator– Restoring force F on a system µ displacement (-x) i.e.– So taking these two eqns we have
Examples
F =dp
dt=d mv( )dt
=mdv
dt=ma
F = −kx
md2x
dt2= −kx
v =dx
dt
a =d2x
dt2

• Radioactive decay of unstable nucleus– Random, independent events, so for given sample of N atoms, no. of
decay events –dN in time dt µ N
– So N(t) depends on No (initial N) and rate of decay
• Beer’s Law – attenuation of radiation– For absorption only (no scattering), decreases in intensity (flux
density) of radiation at some distance x into medium, Φ(x) is proportional to x
– Same form as above – will see leads to exponential decay– Radiation in vegetation, clouds etc etc
Examples
−dN
dt∝N
dφ x( )dx
∝−φ x( )

• Compound Interest– How does an investment S(t), change with time, given an annual
interest rate r compounded every time interval Δt, and annual deposit amount k?
– Assuming deposit made after every time interval Δt
– So as Δtè0
Examples
S t +Δt( ) = S t( )+ rΔt( )S t( )+ kΔt
S t +Δt( )− S t( )Δt
=dS
dt= rS + k
http://www.thecreditexaminer.com/five-things-to-know-about-compound-interest-and-savings/http://www.singaporeolevelmaths.com/tag/compound-interest-formula/`

• Population dynamics– Logistic equation (Malthus, Verhulst, Lotka….)– Rate of change of population P with t depends on Po, growth rate r
(birth rate – death rate) & max available population or ‘carrying capacity’ K
– P << K, dP/dt µ rP but as P increases (asymptotically) to K, dP/dtgoes to 0 (competition for resources – one in one out!)
– For constant K, if we set x = P/K then
Examples
dP
dt= rP 1−
P
K
d
dt
P
K= r
P
K1−
P
K
→
dx
dt= rx 1− x( )
http://www.scholarpedia.org/article/Predator-prey_model#Lotka-Volterra_Model

• Population dynamics: II– Lotka-Volterra (predator-prey) equations – Same form, but now two populations x and y, with time –
– y is predator and yt+1 depends on yt AND prey population (x)– x is prey, and xt+1 depends on xt AND y– a, b, c, d – parameters describing relationship of y to x
• More generally can describe– Competition – eg economic modelling– Resources – reaction-diffusion equations
Examples
dx
dt= x a− by( ),
dy
dt= −y c− dx( )
A ‘phase space’ plot – see later on logistic growth, http://www.scholarpedia.org/article/Predator-prey_model#Lotka-Volterra_Model

Examplesdx
dt= x a− by( ),
dy
dt= −y c− dx( )
http://www.evolution-of-ideas.com/homepage/Mathematics/mathsinner/A%20model%20of%20corruption.htm

• Transport: momentum, heat, mass….– Transport usually some constant (proportionality factor) x driving force– Newton’s Law of viscosity for momentum transport
• Shear stress, τ, between fluid layers moving at different speeds - velocity gradient perpendicular to flow, μ = coeff. of viscosity
– Fourier’s Law of heat transport• Heat flux density H in a material is proportional to (-) T gradient and area
perpendicular to gradient through which heat flowing, k = conductivity. In 1D case…
– Fick’s Law of diffusive transport• Flux density F’j of a diffusing substance with molecular diffusivity Dj across density
gradient dρj/dz (j is for different substances that diffuse through air)
Examples
τ = µdudz
H = −k dTdz
!Fj = −Djdρ j
dzSee Campbell and Norman chapter 6

• Analytical, closed form– Exact solution e.g. in terms of elementary functions
such as ex, log x, sin x
• Non-analytical– No simple solution in terms of basic functions– Solution requires numerical methods (iterative) to
solve– Provide an approximate solution, usually as infinite
series
Types: analytical, non-analytical

• Analytical example– Exact solution e.g.
– Solve by integrating both sides
– This is a GENERAL solution• Contains unknown constants
– We usually want a PARTICULAR solution• Constants known• Requires BOUNDARY conditions to be specified
Types: analytical, non-analytical
dxdt= ax
dxx∫ = a dt∫ ln(x)+ c1 = at + c2 x = eat+ c2−c1( ) = eate c2−c1( )

• Particular solution?– BOUNDARY conditions e.g. set t = 0 to get c1, 2 i.e.
– So x0 is the initial value and we have
– Exponential model ALWAYS when dx/dt µ x• If a>0 == growth; if a < 0 == decay• Population: a = growth rate i.e. (births-deaths)• Beer’s Law: a = attenuation coeff. (amount x absorp. per
unit mass)• Radioactive decay: a = decay rate
Types: analytical, non-analytical
x(t) = x0eat
x(t = 0) = e c2−c1( ) = x0
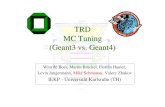
• Analytical: population growth/decay exampleTypes: analytical, non-analytical
dPdt
= (b− d)P P t( ) = P0eb−d( )t
Log scale – obviously linear….

• ODE (ordinary DE)– Contains only ordinary derivatives
• PDE (partial DE)– Contains partial derivatives – usually case when
depends on 2 or more independent variables– E.g. wave equation: displacement u, as function of
time, t and position x
Types: ODEs, PDEs
d2y
dx2+dy
dx= x
∂2u
∂t2= c
2 ∂2u
∂x2

• ODE (ordinary DE)– Contains only ordinary derivatives (no partials)– Can be of different order
• Order of highest derivative
Types: Order
md2x
dt2= −kx
d2y
dx2+dy
dx= x
dx
dt= xt( )
5
2nd 2nd 1st

• ODE (ordinary DE)– Can further subdivide into different degree
• Degree (power) to which highest order derivative raised
Types: Order -> Degree
dy
dt
3
+ y = sin tdx
dt+ x
2=1
d2y
dx2
2
+dy
dx
3
= 3
1st order3rd degree
1st order1st degree
2nd order2nd degree

• ODE (ordinary DE)– Linear or non-linear?
• Linear if dependent variable and all its derivatives occur only to the first power, otherwise, non-linear
• Product of terms with dependent variable == non-linear• Functions sin, cos, exp, ln also non-linear
Types: Linearity
sin xdy
dx+ y = x
d2y
dx2+ y
2= 0
Linear Non-lineary2 term
Non-linearsin y term
dy
dx+ sin y = 0y
dy
dx= x
2
Non-lineary dy/dx

• General solution– Often many solutions can satisfy a differential eqn– General solution includes all these e.g.– Verify that y = Cex is a solution of dy/dx = y, C is any constant– So
– And for all values of x, and eqn is satisfied for any C– C is arbitrary constant, vary it and get all possible solutions– So in fact y = Cex is the general solution of dy/dx = y
Solving
dy
dx=Ce
x
dy
dx= y

• But for a particular solution– We must specify boundary conditions– Eg if at x = 0, we know y = 4 then from general solution– 4 = Ce0 so C = 4 and – is the particular solution of dy/dx = y that satisfies the
condition that y(0) = 4– Can be more than one constant in general solution– For particular solution number of given independent conditions
MUST be same as number of constants
Solving
y = 4ex

• Analytical: Beer’s Law - attenuation– k is extinction coefficient – absorptivity per unit depth, z (m-1)
– E.g. attenuation through atmosphere, where path length (z) µ1/cos(θsun), θsun is the solar zenith angle
– Take logs:– Plot z against ln(ϕ), slope is k, intercept is ϕ0 i.e. solar radiation
with no attenuation (top of atmos. – solar constant)
– [NB taking logs v powerful – always linearise if you can!]
Types: analytical, non-analytical
dφ z( )dz
= −kφ z( ) φ z( ) = φ0e−kz
lnφ z( ) = lnφ0 − kz

• One point conditions– We saw as general solution of– Need 2 conditions to get particular solution
• May be at a single point e.g. x = 0, y = 0 and dy/dx = 1• So and solution becomes• Now apply second condition i.e. dy/dx = 1 when x = 0 so differentiate
– Particular solution is then
Initial & boundary conditions
d2y
dx2+ y = 0y = Acos x +Bsin x
0 = Acos0+Bsin0 = A y = Bsin x
dy
dx= Bcos x 1= Bcos0 = B
y = sin x

• Verify that satisfies
• Verify that is a solution of– (2nd order, 1st degree, linear)
Solving: examplesd2y
dx2+ y = 0y = Acos x +Bsin x
x = t2+ A ln t +B t
d2x
dt2+dx
dt= 4t

• Two point conditions– Again consider– Solution satisfying y = 0 when x = 0 AND y = 1 when x = 3π/2– So apply first condition to general solution – i.e. and solution is – Applying second condition we see
– And B = -1, so the particular solution is
– If solution required over interval a ≤ x ≤ b and conditions given at both ends, these are boundary conditions (boundary value problem)
– Solution subject to initial conditions = initial value problem
Initial & boundary conditions
d2y
dx2+ y = 0
0 = Acos0+Bsin0 = A
y =1= Bsin 3π2
y = Acos x +Bsin x
y = Bsin x
y = −sin x

• We have considered simple cases so far– Where and so
• What about cases with ind. & dep. variables on RHS?– E.g.
• Important class of separable equations. Div by g(y) to solve
– And then integrate both sides wrt x
Separation of variables
dydx
= f x( ) y = f x( )dx∫
dydx
= f x( )g y( )
1g y( )
dydx
= f x( )
1g y( )
dydx∫ dx = 1
g y( )∫ = f x( )∫ dx
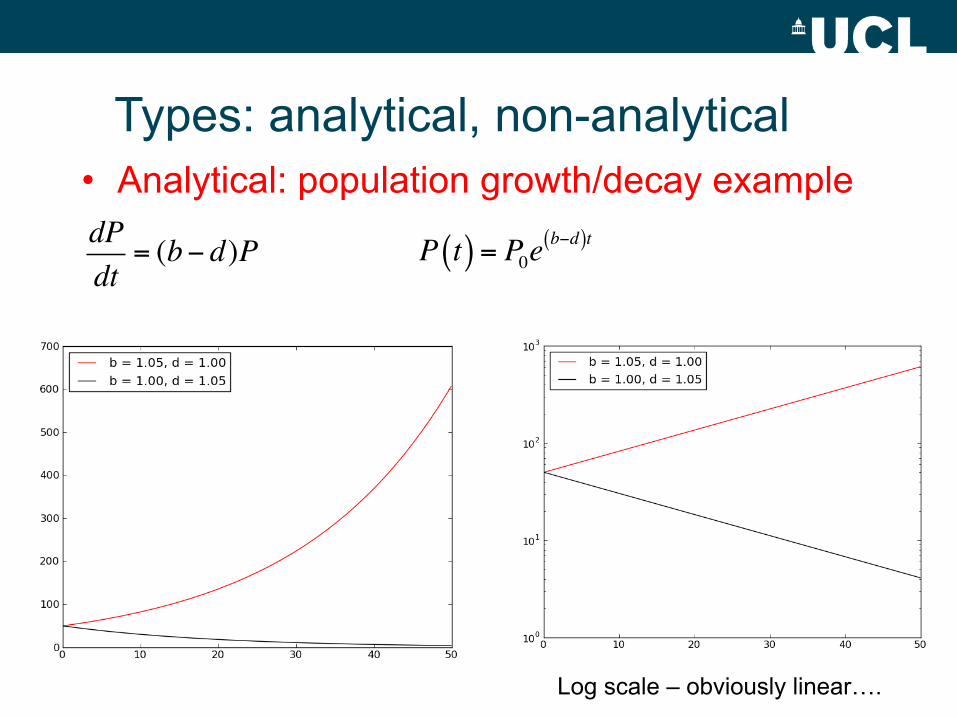
• Equation is now separated & if we can integ. we have y in terms of x– Eg where and
– So multiply both sides by y to give and then integrate both sides wrt x
– i.e. and so and
– If we define D = 2C then
Separation of variables
y∫ dy = e−x dx∫
dydx
=e−x
yf x( ) = e−x g y( ) = 1
y
y dydx
= e−x
y2
2= −e−x +C y2 = −2e−x + 2C
y = ± D− 2e−x
Eg See Croft, Davison, Hargreaves section 18, orhttp://www.cse.salford.ac.uk/profiles/gsmcdonald/H-Tutorials/ordinary-differential-equations-separation-variables.pdfhttp://en.wikipedia.org/wiki/Separation_of_variables

• Form– Where p(x), q(x), r(x) and f(x) are fns of x only– This is inhomogeneous (dep on y)– Related homogeneous form ignoring term independent of y
– Use shorthand L{y} when referring to general linear diff. eqn to stand for all terms involving y or its derivatives. From above
– for inhomogeneous general case– And for general homogenous case
– Eg if then where
2nd order linear equationsp x( ) d
2ydx2
+ q x( ) dydx+ r x( ) y = f x( )
p x( ) d2ydx2
+ q x( ) dydx+ r x( ) y = 0
L y{ }= f x( )L y{ }= 0
d 2ydx2
− 4y = x3 L y{ }=d 2ydx2
− 4yL y{ }= x3

• DEs with two or more dependent variables– Particularly important for motion (in 2 or 3D), where eg position
(x, y, z) varying with time t
• Key example of wave equation– Eg in 1D where displacement u depends on time and position– For speed c, satisfies
– Show is a solution of
– Calculate partial derivatives of u(x, t) wrt to x, then t i.e.
Partial differential equations
∂2u∂t2
= c2 ∂2u∂x2
∂2u∂t2
= 4 ∂2u∂x2
u x, t( ) = sin x + 2t( )
∂u∂x
= cos x + 2t( ) ∂u∂t= 2cos x + 2t( )

– Now 2nd partial derivatives of u(x, t) wrt to x, then t i.e.
– So now
– More generally we can express the periodic solutions as (remembering trig identities)
– and
– Where k is the wave vector (2π/λ); ω is the angular frequency (rads s-1) = 2π/T for period T;
Partial differential equations
∂2u∂x2
= −sin x + 2t( ) ∂2u∂t2
= −4sin x + 2t( )∂2u∂t2
= −4sin x + 2t( ) = 4 −sin x + 2t( )#$ %&= 4∂2u∂x2
http://en.wikipedia.org/wiki/List_of_trigonometric_identitieshttp://www.physics.usu.edu/riffe/3750/Lecture%2018.pdfhttp://en.wikipedia.org/wiki/Wave_vector
u+ x, t( ) = Aei kx−ωt( ) u− x, t( ) = Bei kx+ωt( )

• In 3D?– Just consider y and z also, so for q(x, y, z, t)
• Some v. important linear differential operators– Del (gradient operator)
– Del squared (Laplacian)
• Lead to eg Maxwell’s equations
Partial differential equations
∂2q∂t2
= c2 ∂2q∂x2
+∂2q∂y2
+∂2q∂z2
"
#$
%
&'
http://www.physics.usu.edu/riffe/3750/Lecture%2018.pdf
q+kxkykx x, y, z, t( ) = Aei kxx+kyy+kzz−ωt( )
q−kxkykx x, y, z, t( ) = Aei kxx+kyy+kzz+ωt( )
∇f x, y, z( ) = ∂f∂xx + ∂f
∂yy+ ∂f
∂zz
∇⋅∇f x, y, z( ) = Δ x, y, z( ) = ∂2 f∂x2
x + ∂2 f∂y2
y+ ∂2 f∂z2
z

• Euler’s Method– Consider 1st order eqn with initial cond. y(x0) = y0
– Find an approx. solution yn at equally spaced discrete values (steps) of x, xn
– Euler’s method == find gradient at x = x0 i.e.– Tangent line approximation
SOLVING: Numerical approachesdydx
= f x, y( )
dydx x=x0
= f x0, y0( )
0 x0 x1 x
True solution
Tangent approx.
y0
y1
y
y(x1)
Croft et al., p495Numerical Recipes in C ch. 16, p710http://apps.nrbook.com/c/index.htmlhttp://en.wikipedia.org/wiki/Numerical_ordinary_differential_equations

• Euler’s Method– True soln passes thru (x0, y0) with gradient f(x0, y0) at that point– Straight line (y = mx + c) approx has eqn– This approximates true solution but only near (x0, y0), so only
extend it short dist. h along x axis to x = x1
– Here, y = y1 and – Since h = x1-x0 we see– Can then find y1, and we then know (x1, y1)…..rinse, repeat….
SOLVING: Numerical approaches
y = y0 + x − x0( ) f x0, y0( )
y1 = y0 + x1 − x0( ) f x0, y0( )
0 x0 x1 x
True solution
Tangent approx.
y0
y1
yy(x1)
y1 = y0 + hf x0, y0( )
yi+1 = yi + hf xi, yi( )
Generate series of values iterativelyAccuracy depends on h
Croft et al., p495Numerical Recipes in C ch. 16, p710http://apps.nrbook.com/c/index.html

• Euler’s Method: example– Use Euler’s method with h = 0.25 to obtain numerical soln. of
with y(0) = 2, giving approx. values of y for 0 ≤ x ≤ 1
– Need y1-4 over x1 = 0.25, x2 = 0.5, x3 = 0.75, x4 = 1.0 say, so– with x0 = 0 y0 = 2– And
SOLVING: Numerical approaches
dydx
= −xy2
yi+1 = yi + hf xi, yi( )
yi+1 = yi + 0.25 −xiyi2( )
y1 = 2− 0.25 0( ) 22( ) = 2.000y2 = 2− 0.25 0.25( ) 22( ) =1.750y3 =1.750− 0.25 0.5( ) 1.7502( ) =1.367y4 =1.367− 0.25 0.75( ) 1.3672( ) =1.017
Exercise: this can be solved ANALYTICALLY via separation of variables. What is the difference to the approx. solution?
NB There are more accurate variants of Euler’s method..

• Runge-Kutta methods (4th order here….)– Family of methods for solving DEs (Euler methods are subset)– Iterative, starting from yi, no functions other than f(x,y) needed– No extra differentiation or additional starting values needed– BUT f(x, y) is evaluated several times for each step
– Solve subject to y = y0 when x = x0, use
– where
SOLVING: Numerical approaches
Croft et al., p502Rile et al. p1026Numerical Recipes in C ch. 16, p710http://apps.nrbook.com/c/index.html
http://en.wikipedia.org/wiki/Numerical_ordinary_differential_equationshttp://en.wikipedia.org/wiki/Runge%E2%80%93Kutta_methods
dydx
= f x, y( )
k1 = f xi, yi( ),k2 = f xi +h2, yi +
h2k1
!
"#
$
%&,k3 = f xi +
h2, yi +
h2k2
!
"#
$
%&,k4 = f xi + h, yi + hk3( )
yi+1 = yi +h6k1 + 2k2 + 2k3 + k4( )
Euler
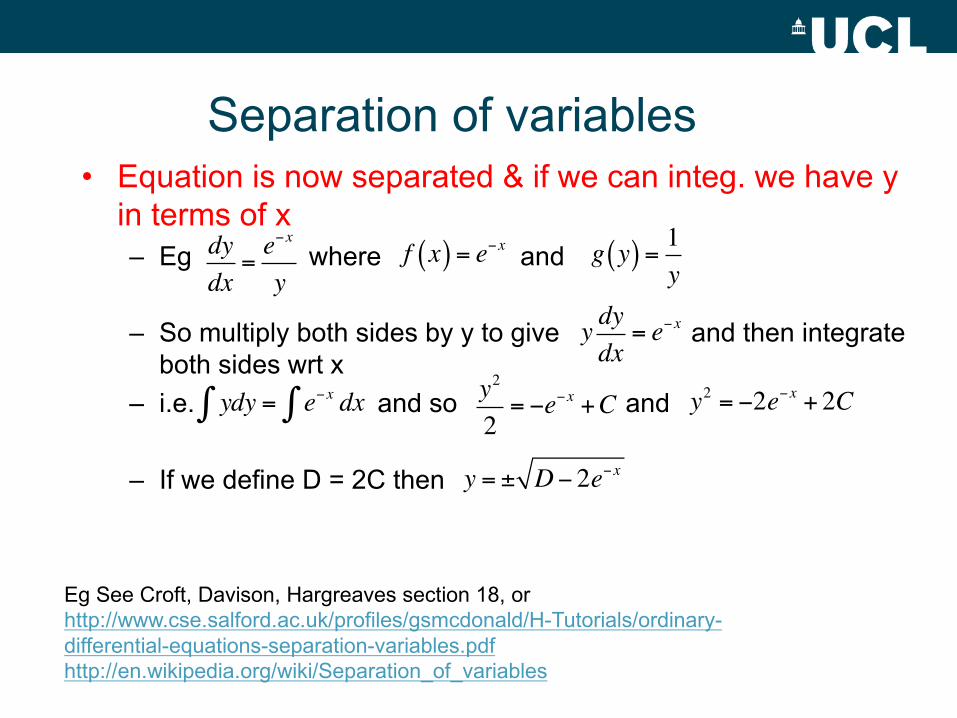
• Runge-Kutta example– As before, but now use R-K with h = 0.25 to obtain numerical
soln. of with y(0) = 2, giving approx. values of y for 0 ≤ x ≤ 1
– So for i = 0, first iteration requires
– And finally
– Repeat! c.f. 2 from Euler, and 1.8824 from analytical
SOLVING: Numerical approaches
dydx
= −xy2
k1 = f x0, y0( ) = − 0( ) 2( )2 = 0
k2 = f 0.125, 2( ) = − 0.125( ) 2( )2 = −0.5
k3 = f 0.125, 2+0.252
−0.5( )"
#$
%
&'= f 0.125,1.9375( ) = −0.125 1.9375( )2 = −0.4692
k4 = f 0.25, 2+ 0.25 −0.4692( )( ) = f 0.25,1.8827( ) = −0.25 1.9375( )2 = −0.8861
y1 = 2+0.256
0+ 2 −0.5( )+ 2 −0.4692( )+ −0.8861( )( ) =1.8823

• Brute force method(s) for integration / parameter estimation / sampling– Powerful BUT essentially last resort as involves random
sampling of parameter space– Time consuming – more samples gives better approximation– Errors tend to reduce as 1/N1/2
• N = 100 -> error down by 10; N = 1000000 -> error down by 1000
– Fast computers can solve complex problems
• Applications:– Numerical integration (eg radiative transfer eqn), Bayesian
inference, computational physics, sensitivity analysis etc etc
Very brief intro to Monte Carlo
Numerical Recipes in C ch. 7, p304http://apps.nrbook.com/c/index.htmlhttp://en.wikipedia.org/wiki/Monte_Carlo_method
http://en.wikipedia.org/wiki/Monte_Carlo_integration

• Pick N random points in a multidimensional volume V, x1, x2, …. xN
• MC integration approximates integral of function f over volume V as
• Where and
• +/- term is 1SD error – falls of as 1/N1/2
Basics: MC integration
Fromhttp://apps.nrbook.com/c/index.html
Choose random points in AIntegral is fraction of points under curve x A
f dV ≈V f∫ ±Vf2 − f
2
N
f ≡1
Nf xi( )
i=1
N
∑ f2
≡1
Nf2xi( )
i=1
N
∑

• Why not choose a grid? Error falls as N-1 (quadrature approach)• BUT we need to choose grid spacing. For random we sample until
we have ‘good enough’ approximation• Is there a middle ground? Pick points sort of at random BUT in
such a way as to fill space more quickly (avoid local clustering)?• Yes – quasi-random sampling:
– Space filling: i.e. “maximally avoiding of each other”
Basics: MC integration
Sobol method v pseudorandom: 1000 pointsFROM: http://en.wikipedia.org/wiki/Low-discrepancy_sequence

• Differential equations– Describe dynamic systems – wide range of examples, particularly
motion, population, decay (radiation – Beer’s Law, mass –radioactivity)
• Types– Analytical, closed form solution, simple functions– Non-analytical: no simple solution, approximations?– ODEs, PDEs– Order: highest power of derivative
• Degree: power to which highest order derivative is raised
– Linear/non:• Linear if dependent variable and all its derivatives occur only to the first
power, otherwise, non-linear
Summary

• Solving– Analytical methods?
• Find general solution by integrating, leaves constants of integration• To find a particular solution: need boundary conditions (initial, ….) • Integrating factors, linear operators
– Numerical methods?• Euler, Runge-Kutta – find approx. solution for discrete points
• Monte Carlo methods– Very useful brute force numerical approach to integration, parameter
estimation, sampling– If all else fails, guess…..
Summary

END

• Radioactive decay– Random, independent events, so for given sample of N atoms, no. of
decay events –dN in time dt µ N so
– Where λ is decay constant (analogous to Beer’s Law k) units 1/t– Solve as for Beer’s Law case so – i.e. N(t) depends on No (initial N) and rate of decay– λ often represented as 1/tau, where tau is time constant – mean
lifetime of decaying atoms– Half life (t=T1/2) = time taken to decay to half initial N i.e. N0/2– Express T1/2 in terms of tau
Example
dN
dt∝−N
dN
dt= −λN
N t( ) = N0e−λt
• Radioactive decay– EG: 14C has half-life of 5730 years & decay rate = 14 per minute per
gram of natural C– How old is a sample with a decay rate of 4 per minute per gram?– A: N/N0 = 4/14 = 0.286– From prev., tau = T1/2/ln2 = 5730/ln2 = 8267 yrs– So t = -tau x ln(N/N0) = 10356 yrs
Example

• General solution of is given by
• Find particular solution satisfies x = 3 and dx/dt = 5 when t =0
• Resistor (R) capacitor (L) circuit (p458, Croft et al), with current flow i(t) described by
• Use integrating factor to find i(t)….approach: re-write as
Exercisesd 2xdt2
−3dxdt+ 2x = 0 x = Aet +Be2t
iR+ L didt= t, t ≥ 0, i 0( ) = 0
didt+RLi = t
L

• Show that the analytical solution of with y(x=0)=2 is
• Compare values from x = 0 to 1 with approx. solution obtained by Euler’s method
•
Exercisesdydx
= −xy2
y = 2x2 +1

• For equations of form– Where P(x) and Q(x) are first order linear functions of x, we can
multiply by some (as yet unknown) function of x, μ(x)
– But in such a way that LHS can be written as– And then
– Which is said to be exact, with μ(x) as the integrating factor– Why is this useful?
Using an integrating factordydx+P x( ) y =Q x( )
ddx
µ x( ) y( )
Eg See Croft, Davison, Hargreaves section 18, orhttp://www.cse.salford.ac.uk/profiles/gsmcdonald/H-Tutorials/ordinary-differential-equations-integrating-factor.pdfhttp://en.wikipedia.org/wiki/Integrating_factor
µ x( ) dydx+µ x( )P x( ) y = µ x( )Q x( )
ddx
µ x( ) y( ) = µ x( )Q x( )

• Because it follows that
• And if we can evaluate the integral, we can determine y
• So as above, we want
• Use product rule i.e. and so, from above
• and by inspection we can see that
• This is separable (hurrah!) i.e.
Using an integrating factor
ddx
µy( ) = µ dydx+µPy
http://en.wikipedia.org/wiki/Product_rulehttp://www.cse.salford.ac.uk/profiles/gsmcdonald/H-Tutorials/ordinary-differential-equations-integrating-factor.pdf
µ x( ) y = µ x( )Q x( )∫ dxddx
µ x( ) y( ) = µ x( )Q x( )
ddx
µy( ) = µ dydx+dµdx
y
µdydx+dµdx
y = µ dydx+µPy
dµdx
= µP
dµµ
∫ = Pdx∫

• And we see that (-lnK is const. of integ.)• And so
• We can choose K = 1 (as we are multiplying all terms in equation by integ. factor it is irrelevant), so
– Integrating factor for is given by
– And solution is given by
Using an integrating factor
http://en.wikipedia.org/wiki/Product_rulehttp://www.cse.salford.ac.uk/profiles/gsmcdonald/H-Tutorials/ordinary-differential-equations-integrating-factor.pdf
µ x( ) = eP x( )dx∫
lnµ − lnK = Pdx∫ln µK= Pdx∫
dydx+P x( ) y =Q x( )
µ x( ) y = µ x( )Q x( )∫ dx

• Solve
– From previous we see that and
– Using the formula above
– And we know the solution is given by
– So , as
Using an integrating factor: example
µ x( ) = eP x( )dx∫ = e
1xdx∫= eln x = x
dydx+yx=1 dy
dx+P x( ) y =Q x( )
P x( ) = 1x
Q x( ) =1
xy = x dx∫ =x2
2+C
µ x( ) y = µ x( )Q x( )∫ dx
Q x( ) =1

• When L{y} = f(x) is a linear differential equation, L is a linear differential operator– Any linear operator L carries out an operation on functions f1
and f2 as follows1.2. where a is a constant3. where a, b are constants
– Example: if show that– and
Linear operators
L f1 + f2{ }= L f1{ }+ L f2{ }L af1{ }= aL f1{ }L af1 + bf2{ }= aL f1{ }+ bL f1{ }
L y{ }=d 2ydx2
+3x dydx− 2y L y1 + y2{ }=
L y1{ }+ L y2{ }L ay{ }= aL y{ }

• Note that L{y} = f(x) is a linear diff. eqn so L is a linear diff operator• So
– we see
– And rearrange:
– & because differentiation is a linear operator we can now see
• For the second case
• So
Linear operators
=d 2y1dx2
+3x dy1dx
− 2y1 +d 2y2dx2
+3x dy2dx
− 2y2
L y1 + y2{ }=d 2
dx2y1 + y2( )+3x d
dxy1 + y2( )− 2 y1 + y2( )
L y1 + y2{ }= L y1{ }+ L y2{ }
L ay{ }=d 2 ay( )dx2
+3xd ay( )dx
− 2 ay( )
L ay{ }=ad 2ydx2
+3ax dydx− 2ay = a d 2y
dx2+3x dy
dx− 2y
"
#$
%
&'= aL y{ }