Geodetic Infrastructures for GNSS-Positioning-Services (GIPS) · GEOSIBERIA 2011 Novosibirsk 27-29....
52
Reiner Jäger, University of Applied Sciences (HSKA) Novosibirsk 27-29. April 2011 GEOSIBERIA 2011 Geodetic Infrastructures for GNSS-Positioning-Services (GIPS) Reiner Jäger, Simone Kälber, Peter Spohn, Ghadi Younis Vasile Chiriac and Andrei Iacovlev (TU Moldova) Prof. Dr.-Ing. Reiner Jäger Hochschule Karlsruhe – Technik und Wirtschaft Faculty of Geomatics Department Vermessung&Geomatik and GIManagement International Study Programme Geomatics (MSc) www.g.hs-karlsruhe.de Institut für Angewandte Forschung (IAF) Moltkestrasse 30, D-76133 Karlsruhe Honorary Professor of the Siberian State Academy of Geodesy (SSGA) www.goca.info , www.monika.ag , www.dfhbf.de , www.moldpos.eu , www.geozilla.de , www.galileo-bw.de , www.navka.de
Transcript of Geodetic Infrastructures for GNSS-Positioning-Services (GIPS) · GEOSIBERIA 2011 Novosibirsk 27-29....

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
Geodetic Infrastructures for GNSS-Positioning -Services (GIPS)
Reiner Jäger, Simone Kälber, Peter Spohn, Ghadi YounisVasile Chiriac and Andrei Iacovlev (TU Moldova)
Prof. Dr.-Ing. Reiner Jäger
Hochschule Karlsruhe – Technik und WirtschaftFaculty of Geomatics
Department Vermessung&Geomatik and GIManagementInternational Study Programme Geomatics (MSc)
www.g.hs-karlsruhe.deInstitut für Angewandte Forschung (IAF)
Moltkestrasse 30, D-76133 KarlsruheHonorary Professor of the Siberian State Academy of Geodesy (SSGA)
www.goca.info , www.monika.ag , www.dfhbf.de , www.moldpos.eu ,www.geozilla.de , www.galileo-bw.de , www.navka.de

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GNSS GNSS Positioning ServicesPositioning Services

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GNSS GNSS -- SystemsSystems
GNSS GNSS forfor Global Global PositioningPositioning in ITRF/ECEF in ITRF/ECEF FramesFrames
GPSGPS
GALILEO GALILEO 20142014
GLONASSGLONASS COMPASSCOMPASS
„„ BeiDouBeiDou --1/21/2““1414--AprilApril --07 07
Space Segment
User Segment Control Segment
< 50 < 50 (2010)(2010)
105! 105! (2014)(2014)

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
SWIPOS +SWIPOS +SWISSATSWISSAT
SWEPOSSWEPOS
““ cmcm ””��������
!Code!Code -- and Phaseand Phase --Corrections Corrections !!
RTCM 3.1RTCM 3.1
Precise Differential (“cm ”) DGNSSRegional DGNSS-Services in and outside Europe
SRPOSSRPOS
SibiriaSibiriaMOLDOVA
www.moldpos.eu

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
12
3
4
TRIMBLE VRSNOW
SITUATION in GERMANYSITUATION in GERMANY
(B,L,h) ITRF-related

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
Space/Satellite Based Augmentation Systems (SBAS)DNGSSDNGSS--Corrections. Standard RTCA and RTCMCorrections. Standard RTCA and RTCM
…… WAAS (USA),CNSS (China),GAGAN/IRNSS (India),QZSS/MS AS (Japan),SWAAS (USA),CNSS (China),GAGAN/IRNSS (India),QZSS/MS AS (Japan),S DCM (Russia)DCM (Russia)

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
EUREF oder IGSEUREF oder IGSRTCMRTCM--CorrectionsCorrections
NTRIPNTRIP--FormatFormat
Mobile Internet Mobile Internet (USB(USB--Stick)Stick)
andandInterNet GNSSInterNet GNSS --RadioRadio
GNSS-Internet Radio
EUREFEUREF--IP or IGSIP or IGS--IP InterNetIP InterNet--Service (NTRIP)Service (NTRIP)

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
Augmentation Systems (SBAS, GSM/Internet-based)........ withwith RTCMRTCM--Corrections for Precise Positioning and Navigation Corrections for Precise Positioning and Navigation
Networked RTCM Corrections

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
Geodetic Infrastructures for GNSSGeodetic Infrastructures for GNSSPositioning ServicesPositioning Services
see alsosee alsoR. JR. Jääger (2010): " ger (2010): " GeodGeod äätische Infrastrukturen ftische Infrastrukturen f üür GNSSr GNSS--Dienste (GIPS)Dienste (GIPS)
In: "In: " Vernetzt und ausgeglichen: Vernetzt und ausgeglichen: Festschrift zur Verabschiedung von Prof. Dr.Festschrift zur Verabschiedung von Prof. Dr. --Ing. habil. Dr.Ing. habil. Dr. --Ing. e.h. GIng. e.h. G üünter Schmitt nter Schmitt
(Band 2010.3)(Band 2010.3) , Zippelt, Karl (Ed.) , Zippelt, Karl (Ed.) Schriftenreihe des Studiengang GeodSchriftenreihe des Studiengang Geod ääsie und Geoinformatik, sie und Geoinformatik,
Karlsruher Institut fKarlsruher Institut f üür Technologie, Studiengang Geodr Technologie, Studiengang Geod ääsie und Geoinformatik sie und Geoinformatik 978978--33--8664486644--576576--5, Dec. 2010. Pages 1515, Dec. 2010. Pages 151 --169.169.
http://www.geozilla.de/files/Geodaetische_Infrastru kturen_fuer_Ghttp://www.geozilla.de/files/Geodaetische_Infrastru kturen_fuer_G NSSNSS--Dienste_%28GIPS%29.Jaeger..pdfDienste_%28GIPS%29.Jaeger..pdf

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
e.g www.moldpos.eu
www.geozilla.de
www.dfhbf.de
www.monika.ag www.goca.info

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GIPSGIPS--11Horizontal PositioningHorizontal Positioning

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
„„ AllAll --overover --thethe --WorldWorld ““ ProblemProblem
)h,L,B(z
)h,L,B(y
)h,L,B(x
X und
)h,L,B(z
)h,L,B(y
)h,L,B(x
Xmit , tXRmX
2222
2222
2222
2
1111
1111
1111
112
=
=+⋅⋅=
X1
X2
Rotation Matrix3 Rotations Non-Linear Realation (see above)
3D Similariy Transformation
GIPSGIPS--1:1: Horizontal DatumHorizontal Datum --Trafo from (B,L)Trafo from (B,L) GNSS,ITRFGNSS,ITRF to Classical Datum (B,L)to Classical Datum (B,L) Classical Classical --Karlsruhe Approach (COPAG) and TrafoKarlsruhe Approach (COPAG) and Trafo --Database ComputationDatabase Computation
essermungshalbmNormalkrüm N(B)mit
Bsin)hNa
b( z
Lsin Bsin h)(N y
L cos B cosh)(N x
2
2
=
⋅+⋅=
⋅⋅+=⋅⋅+=

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
[ ]
∆
ε
ε
ε
⋅=
+
−
∆
∆
∆
−
z
y
x
z
y
x
i,1)h,L,B(
ih
L
B
i
12)b,a(,1)b,a(
2)b,a(,1)b,a(
2)b,a(,1)b,a(
2
t
t
t
sMoldenski
v
v
v
)
h
L
B
h
L
B
h
L
B
(
Solution of the horizontal Transformation Problem
3D 3D SimilaritySimilarityransformationransformation
RelatedRelated to to ((B,L,hB,L,h ))
⋅⋅⋅+⋅⋅⋅⋅⋅⋅⋅⋅−
⋅+⋅+−−
⋅++−⋅⋅⋅
⋅++−⋅⋅⋅
++⋅−
+⋅−
+⋅⋅⋅−
++⋅⋅
++⋅⋅−
)Bsin()Lsin()Bcos()Lcos()Bcos(Wah0)Lcos()Bcos()Bsin(eN)Lsin()Bcos()Bsin(eN
0)Bcos()hN(
)Lcos(
)Bcos()hN(
)Lsin(01
)Bcos()hN(
)h)e1(N()Lsin()Bsin(
)Bcos()hN(
)h)e1(N()Lcos()Bsin(hM
)Bcos(
hM
)Lsin()Bsin(
hM
)Lcos()Bsin(
hM
eN)Bcos()Bsin(0
hM
hWa)Lcos(
hM
hWa)Lsin(
22
22
2
Bsine1N
aW 22 ⋅−==
2
222
a
bae
−=
1D-,2D-,3D-
Identical Points
WTRANSwww.geozilla.de
GIPSGIPS--11 Horizontal Datum Horizontal Datum TransitionTransition fromfrom (B,L) (B,L) GNSS,ITRF GNSS,ITRF to to ClassicalClassical Datum Datum (B,L)(B,L) ClassicalClassical –– Karlsruhe Approach (COPAG) and TrafoKarlsruhe Approach (COPAG) and Trafo --DatabaseDatabase --ComputionCompution

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
ITRF / ETRF89 - Datum Old Classical Systems
StrictStrict andandGeneralGeneralTRAFOTRAFO
GNSSGNSS--practicepractice
GISTransition toITRFGNSSconsistent
frame
GIPSGIPS--1:1: Horizontal DatumHorizontal Datum --Trafo from (B,L)Trafo from (B,L) GNSS,ITRFGNSS,ITRF to Classical Datum (B,L)to Classical Datum (B,L) Classical Classical -- Karlsruhe Approach (COPAG) and TrafoKarlsruhe Approach (COPAG) and Trafo --Database ComputationDatabase Computation
Long waved deflections - „Weak shapes“

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
COPAG = Continuously Pa tched G eoreferencing
Continuity along theMesh Borders!
GIPSGIPS--11: Horizontal Datum: Horizontal Datum --Trafo (B,L)Trafo (B,L) GNSS,ITRFGNSS,ITRF to Classical Datum (B,L)to Classical Datum (B,L) ClassicalClassicalKarlsruhe Approach (COPAG) and Database ComputationKarlsruhe Approach (COPAG) and Database Computation

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
DFLBF_DBTransformationParameters & Residuals
ReferenceReference --TransformationTransformation((DataData / Parameters / / Parameters / AlgorithmsAlgorithms ))
Source CRS Target CRS
(B,L,h) GNSS => (B,L)Classical(B,L,h) GNSS => (B,L,H)Classical
GIPSGIPS--11: Horizontal Datum: Horizontal Datum --Trafo (B,L)Trafo (B,L) GNSS,ITRFGNSS,ITRF to Classical Datum (B,L)to Classical Datum (B,L) ClassicalClassicalKarlsruhe Approach (COPAG) and Database ComputationKarlsruhe Approach (COPAG) and Database Computation
Hungary1-3 cm

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
Meshes = “Patching“ forCorrego Alegre Classical Datum
Brasil
(1 – 5) cmTransformationparameterDatabases for 3 Classical
Datum-systems
GIPSGIPS--11: Horizontal Datum: Horizontal Datum --Trafo (B,L)Trafo (B,L) GNSS,ITRFGNSS,ITRF to Classical Datum (B,L)to Classical Datum (B,L) ClassicalClassicalKarlsruhe Approach (COPAG) and Database ComputationKarlsruhe Approach (COPAG) and Database Computation

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GIPSGIPS--11: Horizontal Datum: Horizontal Datum --Trafo (B,L)Trafo (B,L) GNSS,ITRFGNSS,ITRF to Classical Datum (B,L)to Classical Datum (B,L) ClassicalClassicalKarlsruhe Approach (COPAG) and Database ComputationKarlsruhe Approach (COPAG) and Database Computation
DFLBF/COPAG Databases for Moldova
www.moldpos.eu

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GIPSGIPS--1.1:1.1: Horizontal Datum Transitionfrom (B,L) GNSS,ITRF to (B,L) Classical
DFLBF-Databases. Use in GNSS-Serviceson controllers and via RTCM
GIPSGIPS--1.21.2 :Horizontal Datum Transitionfrom (B,L) Classical to (B,L) GNSS,ITRF
COPAG-Databases for GIS
GIPSGIPS--11: Horizontal Datum: Horizontal Datum --Trafo (B,L)Trafo (B,L) GNSS,ITRFGNSS,ITRF to Classical Datum (B,L)to Classical Datum (B,L) ClassicalClassical
Karlsruhe Approach (COPAG) and Database ComputationKarlsruhe Approach (COPAG) and Database Computation
www.geozilla.de

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GIPSGIPS--22GNSSGNSS--HeightingHeighting

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
H = h - N(B,L,h)
GNSS Heighting„H from h- GNSS“
HRSHRShh
HH
hhNN
GeoidGeoid (HBF)(HBF)EllipsoidEllipsoid
+/+/-- 70 m70 m
ReferenceReference --TransformationTransformationSource CRS Target CRS(B,L,h) GNSS => N
www.dfhbf.de
GIPSGIPS--22:: Height Reference Surface (HRS) Qgeoid/Geoid (N) for Transition Height Reference Surface (HRS) Qgeoid/Geoid (N) for Transition hhGNSS,ITRFGNSS,ITRF to to Physical Heights H = hPhysical Heights H = h --N N -- Karlsruhe Approach (DFHBF) and DFHBFKarlsruhe Approach (DFHBF) and DFHBF --DBComputationDBComputation

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GIPSGIPS--22:: Height Reference Surface (HRS) Qgeoid/Geoid (N) for Transition Height Reference Surface (HRS) Qgeoid/Geoid (N) for Transition hhGNSS,ITRFGNSS,ITRF to to Physical Heights H = hPhysical Heights H = h --N N -- Karlsruhe Approach (DFHBF) and DFHBFKarlsruhe Approach (DFHBF) and DFHBF --DBComputationDBComputation
ξj + v = - fBT / M(B) ⋅ p + ∂ ξ (dξξξξ,ηηηη) j
ηηηη j + v = -fLT/(N(B)⋅cos(B)) ⋅ p + ∂ η(dξξξξ,ηηηη) j
)(4 ∫∫σγ⋅π⋅ B
a ∆∆∆∆g·S(ψ)dσ
)(dg )'(cosP)'msin'S'mcos'C(r
)1)k(n(
r
avg
0k
k
0mm),k(nm),k(nm)),k(n
1)k(n
rLGVgrav d+∑ ∑ θ⋅λ⋅+λ⋅+
=+∞
= =
+
)hm()'S,'C(Nv0 Tm),k(nm),k(nN ⋅∆+⋅−=+ ∆ pf
hGNSS+ v = H + fT ⋅ p - hGPS·∆∆∆∆ m
H + v = H
NG‘ j + v j = fT ⋅ p + ∂NG(d j)
IdenticaP
oints
-Existing nonfitted Qgeoid -/ Geoid GridsGrids
Deflections fo the Vertical from modern Zenith-Cameras or from Classical Geod- Astron. Campaigns
„Patching“
http://www.geozilla.de/files/Geodaetische_Infrastrukturen_fuer_GNSS-Dienste_%28GIPS%29.Jaeger..pdf
New: Global Geopotential Model (EIGEN,EGM2008)Coefficients (C nm,Snm) => Mapped to SphericalCap-Harmonic Coefficients (C‘ nm, S‘nm)
(C‘nm, S‘nm) => Introduced as direct observations

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
SoftwareSoftwareSreenshotSreenshot
•• IdenticalIdentical„„FittingFitting““PointsPoints
((B,L,h;HB,L,h;H))
•• MeshesMeshes
www.dfhbf.dewww.dfhbf.de
GIPSGIPS--22: Height Reference Surface (HRS) Qgeoid/Geoid (N) f or Transition: Height Reference Surface (HRS) Qgeoid/Geoid (N) f or Transition hhGNSS,ITRFGNSS,ITRF to to Physical Heights H = hPhysical Heights H = h --N N -- Karlsruhe Approach (DFHBF) and DFHBFKarlsruhe Approach (DFHBF) and DFHBF --DBComputationDBComputation

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
-- DataBaseDataBase
GIPSGIPS--22:: Height Reference Surface (HRS) Qgeoid/Geoid (N) for Transition Height Reference Surface (HRS) Qgeoid/Geoid (N) for Transition hhGNSS,ITRFGNSS,ITRF to to Physical Heights H = hPhysical Heights H = h --N N -- Karlsruhe Approach (DFHBF) and DFHBFKarlsruhe Approach (DFHBF) and DFHBF --DBComputationDBComputation
Quasi-Geoid N QG Quasi-Geoid N G
Hg
NN QGG ⋅γ
γ−+=

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
www.moldpos.eu 1-2 cm Quasigeoid for MoldovaPatching of
EGG97 or EGM2008 GPMNearly same results
www.dfhbf.dewww.dfhbf.de
GIPSGIPS--22: Height Reference Surface (HRS) Qgeoid/Geoid (N) f or Transition: Height Reference Surface (HRS) Qgeoid/Geoid (N) f or Transition hhGNSS,ITRFGNSS,ITRF to to Physical Heights H = hPhysical Heights H = h --N N -- Karlsruhe Approach (DFHBF) and DFHBFKarlsruhe Approach (DFHBF) and DFHBF --DBComputationDBComputation

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
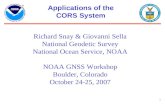
GIPSGIPS--33RTCM Transformation MessagesRTCM Transformation Messages
ProvisionProvision

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GIPS-3: RTCM Transformationmessages and Setup from Reference Transformations - Karlsruhe Ap proach
Old standard:Trafo-Databases or„Grids“ in contollers Trimble, Leica-Geosystems, Topon, etc.

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
New standard:RTCM-Transformation Parameters from GNSS-Positioning Service

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
„Gridding“ of Reference Transformations by Virtual Fitting Points
GIPS-3: RTCM Transformationmessages and Setup from Reference Transformations - Karlsruhe Approach
New standard:RTCM-Transformation Parameters from GNSS-Positioning Service

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
Message 1021 or 1022
GridLocation&Size
7 Parameters
Ellipsoid ParametersSource / Target
Geoid-Grid or not
GIPS-3: RTCM Transformationmessages and Setup from Reference Transformations - Karlsruhe Approach

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
MessageMessage 10231023 Message 1024or
Height Indicator = 1 „dh i„ = Physical Heights‘ Residuals dH i
Height Indicator = 2 „dh i„ = Geoid / HRS Heights N i (dN i)
Residuals P 14
Residuals P 15
Residuals P 16
:: ::
GIPS-3: RTCM Transformationmessages and Setup from Reference Transformations - Karlsruhe Approach

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
UsingReference
Transformations
to compute
a country-wide
1.)„STATIC
GRID“(„Large Residuals“ Grid)
GIPS-3: RTCM Transformationmessages and Setup from Reference Transformations - Karlsruhe Approach

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
Using Reference Transformations to compute country-widegrids dynamically online on NMEA-request by virtual fitting points
1.) No preceeding „Gridding“ Discretization Error2.) Small Residuals - Small Interpolation error3.) De facto - De facto independe nce of the residual
interpolation method in the rover
2.)„Dynamic
Grid “
Advantages
GIPS-3: RTCM Transformationmessages and Setup from Reference Transformations - Karlsruhe Approach

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
Using Reference Tranformations to compute grids dynamica lly„Dynamic Grid“
4.) Direct use of Original Reference Transformations
ϑ⋅λ+λ⋅+⋅=λϑ ∑ ∑
∞
= =)(cosP)msinSmcosC()
r
a(1(
r
GM),,r(W nmnmnm
n
2n
n
0m
80GRS
NhGNSS
UW))z,y,x((N
−γ−=
))u,,ß(|)M,,,a(UU REF λωε=
β⋅λ⋅β⋅ε+⋅
λ⋅⋅ε+⋅
=
sinu
sincosu1u
cosßcosu1u
z
y
x22
i
22i
GIPS-3: RTCM Transformationmessages and Setup from Reference Transformations - Karlsruhe Approach

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
Using Reference Tranformations to compute grids dynamica lly„Dynamic Grid“
5.) „Combined Message Generation“
[([(B,L,h)B,L,h) ITRFITRF--relatedrelated ]] ii ⇒⇒⇒⇒⇒⇒⇒⇒ [(B,L)[(B,L) TT , H, HTT or or N)]N)] ii
[([(B,L,h)B,L,h) ITRFITRF--relatedrelated ]] ii ⇒⇒⇒⇒⇒⇒⇒⇒ [[ ((B,L,h)B,L,h) GNSS,ITRFGNSS,ITRF]] ii
Part 1Part 1 -- PlatePlate ModelsModels
Part 2Part 2 -- Standard Standard ReferenceReference TransformationsTransformations
VirtualVirtual FittingFitting --PointsPoints
VirtualVirtual Fitting Fitting PointsPoints
Dynamic Message Set up by local 7PT Gridding
GIPS-3: RTCM Transformationmessages and Setup from Reference Transformations - Karlsruhe Approach

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GIPS-3: RTCM Transformationmessages and Setup from Reference Transformations - Karlsruhe Approach

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
Reference TransformationsDFHBF Florida
DFHBF BavariaDFLBF Bavaria
www.geozilla.de
GIPS-3: RTCM Transformationmessages and Setup from Reference Transformations - Karlsruhe Approach

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GIPSGIPS--44Monitoroing of GNSSMonitoroing of GNSS --Reference Reference Stations including GeomonitoringStations including Geomonitoring

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
2
k,iR
1k,iRˆˆ
Tk,iRk,i
R ˆ3
ˆ)(ˆ)ˆ(T
σ⋅
∇∇=∇
−∇∇ xQx
x
Old Classical Systems
GNSS Reference StationMONItoringby the KA rlsruheapproach and software (MONIKA )
GIPS-4: GNSS-Reference Station Monitoring and Use as Geosens or-Networksfor Geomonitoring and Hazard Mitigation – Karlsruhe Approach (MONIKA)
www.monika.ag

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
Additionally: Local Object – Monitoring andDeformation Analysis
MONIKACoordinate related Reference-Points Deformation Analysis
www.monika.agwww.monika.ag
Multivariate and Multi-EpochCongruency Testing
GIPS-4: GNSS-Reference Station Monitoring and Use as Geosens or-Networksfor Geomonitoring and Hazard Mitigation – Karlsruhe Approach (MONIKA)

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
MONIKA Step 1
)t(),t( ili Cl
GNSSControl-Software
I. GNSS RINEX
Processing EnginesProcessing Engines• WA1 (Wanninger Software)• Berner GNSS-Software 5.0• RTKLIB - based
jixji )t(C,)t(x
www.monika.agwww.monika.ag
GIPS-4: GNSS-Reference Station Monitoring and Use as Geosens or-Networksfor Geomonitoring and Hazard Mitigation – Karlsruhe Approach (MONIKA)
1. Data Communication2. Processing
II. GNSS SINEX
Import jixji )t(C,)t(x

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
MONIKA Step 2
•• BaselinesBaselines•• EpochEpoch NetworksNetworks•• Partial Partial networksnetworks•• Daily Daily SolutionsSolutions
••EpochEpoch StatesStates
jixji )t(C,)t(x
)t(C),t(x ixi
t∆
GIPS-4: GNSS-Reference Station Monitoring and Use as Geosens or-Networksfor Geomonitoring and Hazard Mitigation – Karlsruhe Approach (MONIKA)

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
MONIKA Step 2 – Coordinate related Referencepoint-Deformationanalysi s
EpochEpoch StatesStatesMONIKA MONIKA StepStep 22
ili )t(,)t( Cl
Original GNSS Original GNSS observationsobservationsRINEXRINEX
Singular
UnknownDatum
MONIKAMONIKAFree GNSS-network
DeformationAnalysis Concept
Helmert-Transformation d=3
)t(C),t(x ixi
0ii x )t(x:)t(x =
Tixix S)t(CS)t(C ⋅⋅=
)t(C),t(x ixi
S-Transformation d=3
MONIKA Trafo 2 MONIKA Trafo 2 -- StepStep 22
?x0
0x New
SINEXSINEX
www.monika.agwww.monika.ag
GIPS-4: GNSS-Reference Station Monitoring and Use as Geosens or-Networksfor Geomonitoring and Hazard Mitigation – Karlsruhe Approach (MONIKA)

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
Consideration of Datum -drift and Plate-Movement RatestxR +⋅εεε⋅∆+=
1t,ITRFyy1zyx1t,zzITRF1 )t(),,()m1()t(x
( ) ( )( ) )tt( )t()t()m( )t()t( 12t.ITRFzz1)j(Pt.ITRFzz1t.ITRFzz1t.ITRFzz2 1112−⋅⋅++⋅∆++= xRtxRxx &&&&
Use
of
IERSParameters
27cm/10y27cm/10y
MONIKA Trafos 1 MONIKA Trafos 1 -- StepStep 220t
it
Reference time
Epoch time
MONIKA Step 2 – Coordinate related Referencepoint-Defor mationanalysis
GIPS-4: GNSS-Reference Station Monitoring and Use as Geosens or-Networksfor Geomonitoring and Hazard Mitigation – Karlsruhe Approach (MONIKA)

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
MONIKA Step 3 – Coordinate related Reference-Point-Deformationanalys is
)t( ixCand
)t(ˆ'ˆd'ˆd'))t(( ik,i
Rki
iO
iO
iR
iR)t(x
i0i i
xBxDxDvxx ∇⋅+⋅+⋅=+−
iO
iO
iR
iR)t(x
i0i ˆdˆd))t((
ixDxDvxx ⋅+⋅=+−
)t(ˆ
000
000
000
...
100
010
001
...
000
000
000
)t(ˆi
k,iR
T
ik,i
Rki xxB ∇⋅
=∇⋅
)t(xiTk
i1k
iiivv
iTkii
k,iR i
)( )t(ˆ vPBBPQPBx ⋅⋅−=∇ − andand 1kii
ivv
iTkii
k,iRˆˆ )()t( −
∇∇ = BPQPBQ
T∆
GIPS-4: GNSS-Reference Station Monitoring and Use as Geosens or-Networksfor Geomonitoring and Hazard Mitigation – Karlsruhe Approach (MONIKA)

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
MONIKA Step 3 – Coordinate related Referencepoint-Deformationanalysi s
3r,32
k,iR
kii
ivv
iTki
Tk,iR
2
k,iR
1k,iRˆˆ
Tk,iRk,i
R
F~ˆ3
ˆ)( ˆ
ˆ3
ˆ)(ˆ)ˆ(T
−
−∇∇
σ⋅
∇⋅⋅∇=
=σ⋅
∇⋅⋅∇=∇
xBPQPBx
xQxx
3D a-posteriori Teststatistics – Significance of k,iRx∇
3r
ˆ)(ˆˆ
k,iR
1k,iRˆˆ
Tk,iR
T2
−
∇⋅⋅∇−=σ
−∇∇ xQxPvv
3.17),,'F(
ˆ)(ˆ
3r,3
k,iR
1k,iRˆˆ
Tk,iR
=βαλ=
∇⋅⋅∇
−
−∇∇ xQx
Test related to 1- α, e.g = 95% Confidence ellipsoid
Sensitivity ellipsoidα = 5 %, ß=95%
( = 1.0 accuracy , 1- α = 19.9 %error ellipsoid )
ß%-Sensitivity
Detectability of GNSSReference StationDeformations k,i
Rx∇
2.43.17f ==
GIPS-4: GNSS-Reference Station Monitoring and Use as Geosens or-Networksfor Geomonitoring and Hazard Mitigation – Karlsruhe Approach (MONIKA)

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GNSS-Positioning-Serviceof Rheinland-Pfalz (SAPOS)
- Volcano Monitoring -
www.monika.agwww.monika.ag
GNSS-Reference Station Monitoring and Use as Geosensor-Networks for Geomonitoring and Haz ard Mitigation
– Karlsruhe Approach (MONIKA) -
GNSS-Positioning-ServiceGeomonitoring of Local
Objects
GNSS-Positioning-ServiceGeomonitoring of Natur
Hazard Zones

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GNSS Positioning ServicesGNSS Positioning Services+ +
GIPSGIPS
Motor for New DevelopmentsMotor for New Developmentse.g. e.g.
Precise Multisensor NavigationPrecise Multisensor Navigation
! Geodetic Know How questioned !! Geodetic Know How questioned !

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GNSS-Positioning Services – Precise Positioning/Geoda ta Acquisition/Navigation
MobileGIS
Mobile Services
Seamless Outdoor/Indoor NavigationMultisensor-Systems
Augemented Reality andMobile Data-Aacquisition

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GNSS-Positioning Services – Precise Positioning/Geoda ta Acquisition/Navigation
( ) ( ) ( )
( ) ( ) ( )
kk
kk
k
kk
kkkkkkk
kkkkkkk
k y
tyy
v
tvv
tyyvyvtyvE
tyyvyvtyvN
y
y
v
v
E
N
∆⋅+
∆⋅+
∆⋅−+∆⋅⋅+
∆⋅++∆⋅⋅+
=
+&
&
&
&
&&
&&
&
&
2
2
1
]sincos[2
1]cos[
]cossin[2
1]sin[
( ) ( ) ( )]3]t]y,0p,0r[)3([)3(y nin
pn
pip
pnp ωRωω ⋅≈≈−==&
www.navka.de
Algorithms for Precise Multisensor-Multi-Purpose Na vigation-Platforms
GNSSGNSS++
Autonomous Sensors (MEMS)Autonomous Sensors (MEMS)•• Gyroscopes Gyroscopes
•• Accelerometers, etc. Accelerometers, etc.
FieldRobots
Water-Drones Air-Drones
Joint Research Project 2011 - 2013

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011
GNSS-Positioning Services – Precise Positioning/Geoda ta Acquisition/Navigation
www.navka.de
Algorithms for Precise Multisensor-Multi-Purpose Na vigation-Platforms
Autonomous Indoor Navigation
Mobile Data Acquisition Systems
Joint ResearchProject 2011,2012,2013

Reiner Jäger, University of Applied Sciences (HSKA)
Novosibirsk 27-29. April 2011GEOSIBERIA 2011