
Genetic algorithm tuned PI controller on PMSM simplified ...
7
J. Cent. South Univ. (2013) 20: 3042−3048 DOI: 10.1007/s117710131827x Genetic algorithm tuned PI controller on PMSM simplified vector control WIBOWO Wahyu Kunto 1 , JEONG Seokkwon 2 1. Mechatronics Engineering, Pukyong National University, Busan 608739, Korea; 2. Refrigeration and AirConditioning Engineering, Pukyong National University, Busan 608739, Korea © Central South University Press and SpringerVerlag Berlin Heidelberg 2013 Abstract: A simple control structure in servo system is occasionally needed for simple industrial application which precise and high control performance is not exessively important so that the cost production can be reduced efficiently. Simplified vector control, which has simple control structure, is utilized as the permanent magnet synchronous motor control algorithm and genetic algorithm is used to tune three PI controllers used in simplified vector control. The control performance is obtained from simulation and investigated to verify the feasibility of the algorithm to be applied in the real application. Simulation results show that the speed and torque responses of the system in both continuous time and discrete time can achieve good performances. Furthermore, simplified vector control combined with genetic algorithm has a similar performance with conventional field oriented control algorithm and possible to be realized into the real simple application in the future. Key words: simplified vector control; conventional field oriented control; permanent magnet synchronous motor; genetic algorithm; PI controller 1 Introduction Permanent magnet synchronous motor (PMSM) has been receiving high attention in various industrial and research application fields because of its fast and accurate torque or speed response in the servo system. A control algorithm to realize those benefits of PMSM motor is needed for performance improvement in real applications. The control algorithm for PMSM which is called vector control technique has made it possible to make those control improvement and development. Direct torque control (DTC) and conventional field oriented control (FOC) are two most popular control manners for PMSM control system. DTC manner is one control method in variable frequency drive used to control the torque of the motor through estimation of stator flux linkage. The advantages of the DTC are reduction in computational time, fast speed and torque responses, elimination of feedback devices, and good control robustness. However, not only this manner needs high sampling frequency to avoid loworder harmonics, but also the hysteresis controllers used by DTC will lead the system to have torque and current ripple[1]. Conventional FOC type uses sensor to detect the rotating reference frame transformation, which information is needed to transform the AC quantities to DC quantities. Complicated coordinate transformations in conventional FOC control structure are necessarily needed to compose the Park and Clarke transformations [2–6]. Simplified vector control (SVC) theory for PMSM has been proposed to avoid this complicated coordinate transformation of conventional FOC so the mathematical calculation can be reduced efficiently. SVC algorithm for PMSM is basically based on the conventional FOC. Therefore, SVC is used as the PMSM control algorithm in this work for the purpose of special application fields which are not exessively sophisticated in precise controls performance and various additional magnetic field controls such as field weakening control. Thus far, many researches about conventional FOC on PMSM have been proposed. These researches implemented the conventional FOC combined with various controller algorithms. Artificial neural network (ANN) algorithm on conventional FOC was proposed for PMSM [5−6]. The results of the proposed system can obtain the desired performance without an exact system mathematical model, but the structural uncertainties of ANN may cause system instability during operational time. KARABACAK and ESKIKURT [7] proposed an PMSM system with backstepping control algorithm. This algorithm provides a systematic procedure to design stabilizing controllers and it has flexibility to avoid cancellations of useful nonlinearities of the system. Received date: 2012−11−13; Accepted date: 2013−09−22 Corresponding author: JEONG Seokkwon, Professor; Tel: +82−51−629−6181; Email : [email protected]
Transcript of Genetic algorithm tuned PI controller on PMSM simplified ...

J. Cent. South Univ. (2013) 20: 3042−3048 DOI: 10.1007/s117710131827x
Genetic algorithm tuned PI controller on PMSM simplified vector control
WIBOWOWahyu Kunto 1 , JEONG Seokkwon 2
1. Mechatronics Engineering, Pukyong National University, Busan 608739, Korea; 2. Refrigeration and AirConditioning Engineering, Pukyong National University, Busan 608739, Korea
© Central South University Press and SpringerVerlag Berlin Heidelberg 2013
Abstract: A simple control structure in servo system is occasionally needed for simple industrial application which precise and high control performance is not exessively important so that the cost production can be reduced efficiently. Simplified vector control, which has simple control structure, is utilized as the permanent magnet synchronous motor control algorithm and genetic algorithm is used to tune three PI controllers used in simplified vector control. The control performance is obtained from simulation and investigated to verify the feasibility of the algorithm to be applied in the real application. Simulation results show that the speed and torque responses of the system in both continuous time and discrete time can achieve good performances. Furthermore, simplified vector control combined with genetic algorithm has a similar performance with conventional field oriented control algorithm and possible to be realized into the real simple application in the future.
Key words: simplified vector control; conventional field oriented control; permanent magnet synchronous motor; genetic algorithm; PI controller
1 Introduction
Permanent magnet synchronous motor (PMSM) has been receiving high attention in various industrial and research application fields because of its fast and accurate torque or speed response in the servo system. A control algorithm to realize those benefits of PMSM motor is needed for performance improvement in real applications. The control algorithm for PMSM which is called vector control technique has made it possible to make those control improvement and development. Direct torque control (DTC) and conventional field oriented control (FOC) are two most popular control manners for PMSM control system.
DTC manner is one control method in variable frequency drive used to control the torque of the motor through estimation of stator flux linkage. The advantages of the DTC are reduction in computational time, fast speed and torque responses, elimination of feedback devices, and good control robustness. However, not only this manner needs high sampling frequency to avoid loworder harmonics, but also the hysteresis controllers used by DTC will lead the system to have torque and current ripple[1]. Conventional FOC type uses sensor to detect the rotating reference frame transformation, which information is needed to transform the AC quantities to
DC quantities. Complicated coordinate transformations in conventional FOC control structure are necessarily needed to compose the Park and Clarke transformations [2–6]. Simplified vector control (SVC) theory for PMSM has been proposed to avoid this complicated coordinate transformation of conventional FOC so the mathematical calculation can be reduced efficiently. SVC algorithm for PMSM is basically based on the conventional FOC. Therefore, SVC is used as the PMSM control algorithm in this work for the purpose of special application fields which are not exessively sophisticated in precise controls performance and various additional magnetic field controls such as field weakening control.
Thus far, many researches about conventional FOC on PMSM have been proposed. These researches implemented the conventional FOC combined with various controller algorithms. Artificial neural network (ANN) algorithm on conventional FOC was proposed for PMSM [5−6]. The results of the proposed system can obtain the desired performance without an exact system mathematical model, but the structural uncertainties of ANN may cause system instability during operational time. KARABACAK and ESKIKURT [7] proposed an PMSM system with backstepping control algorithm. This algorithm provides a systematic procedure to design stabilizing controllers and it has flexibility to avoid cancellations of useful nonlinearities of the system.
Received date: 2012−11−13; Accepted date: 2013−09−22 Corresponding author: JEONG Seokkwon, Professor; Tel: +82−51−629−6181; Email : [email protected]
J. Cent. South Univ. (2013) 20: 3042−3048 3043
However, the controller design procedure is much more complicated especially dealing with complicated system such as PMSM applications. LÜ and ZHANG [8] and ERBATUR et al [9] suggested that PMSM control system should be based on sliding mode control. Sliding mode control can achieve decent robustness, but the unavoidable chattering problem may lead the system to a highfrequency oscillation of torque. Fuzzy logic controller (FLC) for PMSM also has been suggested by Refs. [10−12]. FLC can also obtain good performance with decent robustness because of the controller usage. The disadvantages of the FLC are based on the designer experience to design the rule base, input and output membership functions, which makes the design procedure complicated.
PI controller has been widely used to control many applications due to its easy maintenance and allows the system to achieve very high performances when the gains are tuned optimally. There are various analytical techniques to optimize the PI controller gain, but some of them are very difficult to deal with a complicated system and take long process. A lot of applications tune the PI controller by trial and error method or ZieglerNichols method. These methods are taken a lot of time to obtain desired gain and unable to guarantee the optimal solution [2−3, 13−14]. Recently, evolutionary computation techniques such as genetic algorithm (GA) have been used to solve complex optimization problems for many complicated application fields. The use of GA in optimizing controller parameter is practical to be adopted into any control application and the optimization result is reasonably accurate [15]. Furthermore, the GA optimization result is efficient in calculation process and gives satisfactory control performance.
In this work, SVC is utilized as the control algorithm to regulate the speed response of the PMSM. PI controller type is adopted in SVC algorithm as the speed controller and current controller of the system. The GA is not only used to decide the three PI controllers gain simultaneously, but also applied to optimize the controller performance. Some simulations are performed to check the speed response performance of the system for both continuous time and discrete time. Furthermore, the discrete time simulation, which used an inverter model as the PMSM driver, is investigated to check the system characteristic comparable to the real application system. Through some investigations on the simulation results, the SVC algorithm gives good control performance similar with the conventional FOC algorithm results. Based on the acquired result, it is known that the continuous time and discrete time responses are similar, so it is possible to realize the SVC
into real application in the future work. Furthermore, the Nyquist sampling time shows that the SVC algorithm is possible to be adopted into the commercial microprocessor unit which is available nowadays in global market.
2 PMSM mathematical model
Surfaced mounted PMSM type is considered in this work because it has large and effective uniform air gap which makes its saliency negligible. Thus, quadrature axis synchronous inductance of the motor is equal to direct axis inductance (Ld=Lq). The mathematical modeling of the PMSM in the synchronous rotating frame can be represented in dq model easily. The stator voltage equations in the synchronous rotating frame is shown as follows [16]:
qs q r ds d ds s ds d d i L i t
L I R v ω − + = (1)
m r ds d r qs q qs s qs d d λ ω ω + + + = i L i t
L i R v (2)
The instantaneous electromagnetic torque is:
( ) qs ds q d qs m e 2 2 3 i i L L i P T − + = λ (3)
In PMSM vector control, the direct axis current (ids) is set to be zero. Therefore, Eq. (3) can be reduced to Eq. (4).
qs m e 2 2 3 i P T λ = (4 )
The relation between inertia and motor speed is shown as
+ +
= L r m r m e
2 d d 2 T
P t P J T ω β ω (5)
Table 1 lists the PMSM motor parameters used in the simulation.
Table 1 PMSM parameters for simulation
Parameter Value
Rated power/kW 1.1
Rated torque/(N∙m) 3
Rated speed, n/(r∙min −1 ) 3 000
Stator resistance, Rs/Ω 2.875
Stator d inductance, Ld/H 8.5×10 −3
Stator q inductance, Lq/H 8.5×10 −3
Flux linkage, λm/Wb 0.175
Moment of inertia, Jm/(kg∙m 2 ) 0.8×10 −3
Friction coefficient, βm/(N∙m∙s/rad) 0.001
Number of poles, P 4
J. Cent. South Univ. (2013) 20: 3042−3048 3044
3 Simplified vector control of PMSM
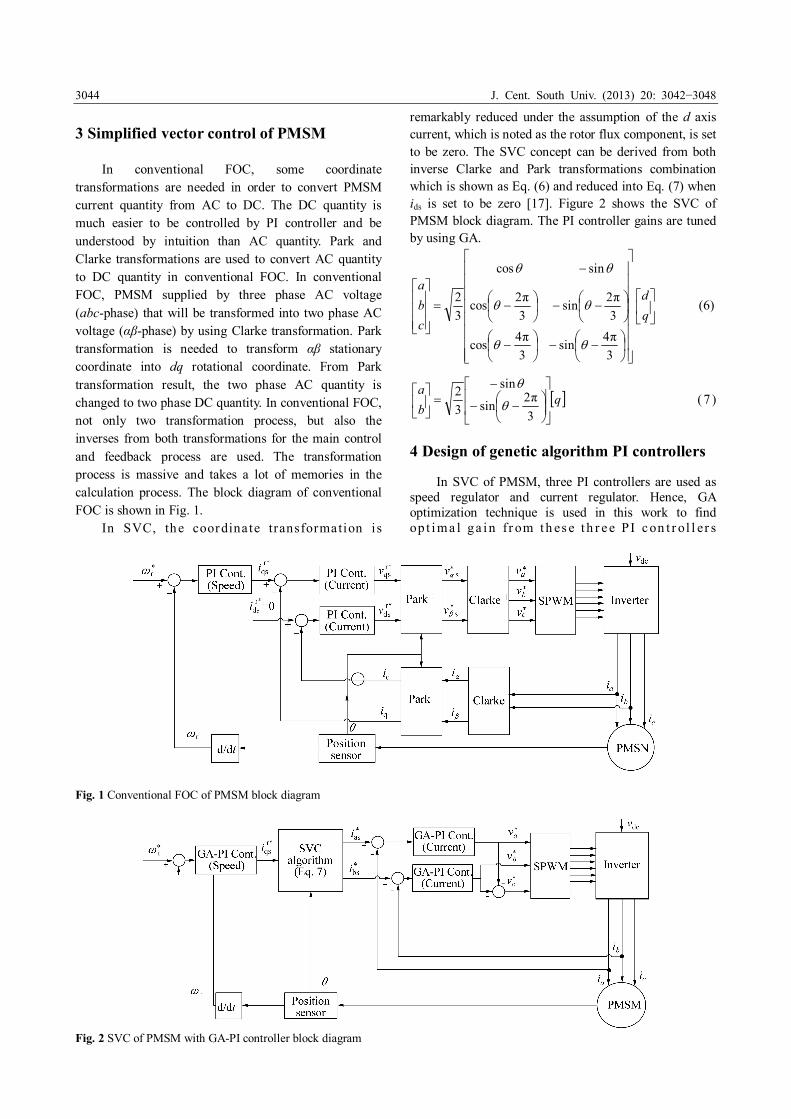
In conventional FOC, some coordinate transformations are needed in order to convert PMSM current quantity from AC to DC. The DC quantity is much easier to be controlled by PI controller and be understood by intuition than AC quantity. Park and Clarke transformations are used to convert AC quantity to DC quantity in conventional FOC. In conventional FOC, PMSM supplied by three phase AC voltage (abcphase) that will be transformed into two phase AC voltage (αβphase) by using Clarke transformation. Park transformation is needed to transform αβ stationary coordinate into dq rotational coordinate. From Park transformation result, the two phase AC quantity is changed to two phase DC quantity. In conventional FOC, not only two transformation process, but also the inverses from both transformations for the main control and feedback process are used. The transformation process is massive and takes a lot of memories in the calculation process. The block diagram of conventional FOC is shown in Fig. 1.
In SVC, the coordinate transformation is
remarkably reduced under the assumption of the d axis current, which is noted as the rotor flux component, is set to be zero. The SVC concept can be derived from both inverse Clarke and Park transformations combination which is shown as Eq. (6) and reduced into Eq. (7) when ids is set to be zero [17]. Figure 2 shows the SVC of PMSM block diagram. The PI controller gains are tuned by using GA.
− −
−
− −
−
−
=
q d
c b a
3 π 4 sin
3 π 4 cos
3 π 2 sin
3 π 2 cos
sin cos
3 2
θ θ
θ θ
θ θ
(6)
[ ] q b a
− −
− =
3 π 2
sin
sin
3 2
θ
θ (7 )
4 Design of genetic algorithm PI controllers
In SVC of PMSM, three PI controllers are used as speed regulator and current regulator. Hence, GA optimization technique is used in this work to find op t ima l ga in fr om th es e t h r ee PI con t r ol l er s
Fig. 1 Conventional FOC of PMSM block diagram
Fig. 2 SVC of PMSM with GAPI controller block diagram

J. Cent. South Univ. (2013) 20: 3042−3048 3045
simultaneously. Mathematical representation of PI controller in complex domain is shown as
s K K s C i + = p ) ( (8 )
Selection, crossover and mutation are GA three main operators which are involved in the optimization process. This algorithm process is repeated for several generations until finding the individuals that represent the optimal solution of the given problems [18]. In this work, the individuals of the GA are the parameter gains of SVC three PI controllers that are selected in certain interval number. This group of individuals is called a population. Each of the individuals will be updated and processed into the controllers (Eq. (8)) until finding the optimal value from the objective function. Mean square error (MSE) criterion is applied in this GA as its objective function. Mathematical representation of MSE is shown as
( ) ( ) ( ) n
t y t r E
n
t ∑=
− = 1
2
MSE (9)
The operation of PI controllers tuned and optimized by using GA is explained in Fig. 3. The maximum generation for the GA process is set as 100 generation and several population size variations are chosen with the aim to find which population size was giving the best optimalization result.
The design specifications such as rise time (tr),
Fig. 3 Flowchart of GAPI controllers optimization
settling time (ts), percent overshoot (p0), and percent error at 0.5 s (e0.5s) depend on these GAPI controllers gain. The design specification is defined into the constraint which acts as penalty strategy.
5 Simulation and results
System performance is analyzed from the speed response of the system. The design specifications of the SVC of PMSM are explained as follows: percent overshoot, p0<1%; rise time, tr<0.05 s; settling time, ts<0.06 s; percent error at 0.5 s, e0.5s<1%.
Speed response characteristics comparison of SVC of PMSM tuned by GA is listed in Table 2. Several population size variations were done on the GA optimalization process.
Table 2 Comparison of speed response characteristics of SVC tuned by GA on PMSM Population size p0/% tr/s ts/s e0.5s/%
20 0.398 0.033 0.041 0.911
40 0.364 0.034 0.042 0.882
60 0.331 0.033 0.041 0.830
80 0.232 0.033 0.041 0.656
From Table 2, generally the dynamic speed response characteristics of the system tuned by GA tuning techniques with many population size variations satisfy the design specifications of the system. However, a GA with population size of 80 gives the best result compared with the other population size. The dynamic responses of the system tuned by GA with population size of 80 in continuous time and discrete time simulation are represented hereafter.
Figure 4 shows the simulation block diagram of PMSM SVC system and Fig. 5 shows the system responses in continuous time.
In this simulation, the initial speed reference was set as 200 rad/s and changed into 250 rad/s at 0.5 s. From Fig. 5(a), it is clear that the speed response was following the initial reference with 0.041 s settling time and responding into the speed changes quickly. Figure 5(b) shows the torque response of the PMSM SVC and it can be explained that the motor torque gave a decent response. The electromagnetic torque of the PMSM follows the 1 N∙m load torque precisely which applied at 0.25 s. Figure 5(c) shows the dq current responses of the system. It is clear that the current gave a good result. The controller was able to keep the d current component in zero value and q current follows the applied load torque.
Figures 6 and 7 show the simulation block diagram of SVC of PMSM system in discrete time and its

J. Cent. South Univ. (2013) 20: 3042−3048 3046
responses, respectively. Inverter model was used in discrete time domain to reflect the real application characteristic of the system. The carrier frequency of the inverter was set as 10 kHz, 300 V is given as the DC link voltage of the inverter, and sinusoidal PWM is adopted as the modulation technique.
Simulation in discrete time was done in the same manner as continuous time simulation. From Fig. 7(a), the speed response in discrete time was similar with the simulation result in continuous time. With 200 rad/s as the speed reference of the system, the dynamic characteristics of the speed response is 0.371 s for the settling time, 0.301 s for the rise time, and 0.417% for
the percent overshoot. It was clear that these dynamic characteristics satisfy the design specifications. Furthermore, the controller was able to make the speed respond quickly into the speed changing at 0.5 s. The torque response, which is shown in Fig. 7(b), followed the applied 1 N∙m load torque accurately. From Fig. 7(c), the dq current responses of the system give a desirable results indicated by the zero values of the d current component and the q current component following the change of electromagnetic torque. These discrete simulation results reflect the real application response characteristics. Based on these results, the GA optimization result was able to be applied into discrete
Fig. 5 SVC system response in continuous time simulation: (a) Speed response; (b) Torque response; (c) dq current responses; (d) Phase current response
Fig. 6 Discrete time SIMULINK block diagram of SVC of PMSM

J. Cent. South Univ. (2013) 20: 3042−3048 3047
Fig. 7 SVC system response in discrete time simulation: (a) Speed response; (b) Torque response; (c) dq current responses; (d) Phase current response
time simulation directly and possible to be implemented into real system. Furthermore, for the same PMSM parameter, through some investigations from the simulation results, it is known that the control performance of the SVC was similar to the conventional FOC control performance. Simulation results of the SVC with controller optimized by GA were gave fast speed response and precise torque control performance.
Feasibility investigation of the PMSM SVC to be applied into the real application was also done by using the discrete time simulation result. Based on the Nyquist sampling theorem, the sampling frequency should be at least twice the highest frequency contained in the signal. The minimum sampling frequency of this system to be able to be applied into the real application can be obtained by performing maximum rated speed of the PMSM on the SVC simulation, which maximum speed is 3 000 r/min. Analyzing the phase current response of the maximum rated speed simulation, the time period of one cycle of the current was almost 0.099 s and the frequency was 100.09 Hz acquired from those time period. Therefore, based on the Nyquist sampling formula, the minimum sampling frequency should be 201.8 Hz. Furthermore, the minimum sampling time for acquiring one sample of data was almost 5 ms. Based on this
Nyquist sampling time calculation result, it is possible to realize the PMSM SVC based on GA into the real application. This is because of the microprosessor ability nowadays can sufficiently meet those minimum sampling time criterion.
5 Conclusions
The control performance of simplified vector control on PMSM with PI controller tuned by GA is simulated and investigated. The GA method is adopted into the system to decide and optimize the three PI controllers gains simultaneously. Based on the simulation results for both continuous time and discrete time, the simplified vector control on PMSM optimized by GA gives a fairly precise control responses similar with the conventional FOC control performance. Moreover, through some investigation from the simulation results in discrete time domain, the SVC on PMSM becomes possible to realize into the real application. This is due to the reflection of the real application system characteristic from the discrete time simulation results. Based on the minimum sampling time requirements, this SVC algorithm is able to realize in the commercial microprocessor. SVC algorithm on PMSM is suitable for
J. Cent. South Univ. (2013) 20: 3042−3048 3048
some simple applications which control performance is not highly precise and need to suppress the cost of production, such as linear conveyor for object movement or horizontal escalator for human transportation.
Nomenclature
vds Stator d voltage supply (V)
vqs Stator q voltage supply (V)
Ld Stator d inductance (H)
Lq Stator q inductance (H)
ids Stator d current (A)
iqs Stator q current (A)
ωr Angular velocity (rad/s)
λm Rotor flux linkage (Wb)
Rs Stator resistance (Ω)
Jm Motor inertia (kg.m 2 )
βm Friction coefficient (N∙m∙s/rad)
P Number of poles
Te Electromagnetic torque (N∙m)
TL Load torque (N∙m)
Kp Proportional gain
Ki Integral gain
C(s) Controller in complex domain
EMSE Mean square error
r(t) Reference input
y(t) Measured variable
n Number of samples
po Percent overshoot (%)
tr Rising time (s)
ts Settling time (s)
e0.5s Percent steadystate error at 0.5 s (%)
References
[1] LU D, LI K, ZHAO G. Speed control for a permanent magnet synchronous motor with an adaptive selftuning uncertainties observer [C]// Life System Modeling and Intelligent Computing, Berlin: Springer, 2010, 379−389.
[2] JATOTH R K, RAJASEKHAR A. Speed control of pmsm by hybrid genetic artificial bee colony algorithm [C]// in IEEE International Conference on Communication Control and Computing Technologies, Ramanathapuram: IEEE Press, 2010, 241−246.
[3] KHATER F, SHALTOUT A, HENDAWI E, ABU ELSEBAH M. PI
controller based on genetic algorithm for pmsm drive system [C]// in IEEE International Symposium on Industrial Electronics, Seoul: IEEE Press, 2009: 250−255.
[4] CHEBRE M, MEROUFEL A, BENDAHA Y. Speed control of induction motor using genetic algorithmbased PI controller indirect fieldoriented control of the IM [J]. Acta Polytechnica Hungarica, 2011, 8(6): 141−153.
[5] ZARE J. Vector control of permanent magnet synchronous motor with surface magnet using artificial neural networks [C]// 2008 43rd International Universities Power Engineering Conference, Padova: IEEE Press, 2008: 1−4.
[6] BILGIN M Z, ÇAKIR B. NeuroPID position controller design for permanent magnet synchronous motor [C]// Advances in Natural Computation, Berlin Heidelberg: Springer, 2006: 418−426.
[7] KARABACAK M, ESKIKURT H. I. Speed and current regulation of a permanent magnet synchronous motor via nonlinear and adaptive backstepping control [J]. Mathematical and Computer Modelling, 2011, 53(9/10): 2015−2030.
[8] LÜ Baofeng, ZHANG Guoxiang. Simulation and research of controlsystem for PMSM based on sliding mode control [J]. Physics Procedia, 2012, 33: 1280–1285.
[9] ERBATUR K, KAYNAK M O, SABANOVIC A. A study on robustness property of slidingmode controllers: A novel design and experimental investigations [J]. IEEE Transactions on Industrial Electronics, 1999, 46(5): 1012−1018.
[10] RAHIDEH A, RAHIDEH A, KARIMI M, SHAKERI A, AZADI M. High performance direct torque control of a pmsm using fuzzy logic and genetic algorithm [C]// 2007 IEEE International Electric Machines & Drives Conference, Antalya: IEEE Press, 2007: 932−937.
[11] YU J, KIM S, LEE B. Fuzzylogicbased vector control scheme for permanentmagnet synchronous motors in elevator drive applications [J]. IEEE Transactions on Industrial Electronics, 2007, 54(4): 2190−2200.
[12] UDDIN M N, ABIDO M A, RAHMAN M A. Realtime performance evaluation of a genetic algorithm based fuzzy logic controller for interior permanent magnet synchronous motor drive [C]// Second International Conference on Electrical and Computer Engineering, Salt Lake City: IEEE Press, 2002: 26−28.
[13] DEY A. SINGH B, DWIVEDI B, CHANDRA D. Vector controlled induction motor drive using genetic algorithm tuned PI speed controller [J]. Electrical Power Quality and Utilisation, 2009, 15(1): 3−8.
[14] DUMAN S, MADEN D, GÜVENÇ U. Determination of the PID controller parameters for speed and position control of DC motor using gravitational search algorithm [C]// International Conference on Electrical and Electronics Engineering (ELECO). Bursa: IEEE Press, 2011: 225−229.
[15] BEDWANI W A, ISMAIL O M. Genetic optimization of variable structure PID control systems [C]// Proceedings ACS/IEEE International Conference on Computer Systems and Applications, Beirut: IEEE Press, 2001: 27−30.
[16] KRISHNAN R. Electric Motor Drives: Modeling Analysis and Control [M]. New Jersey: Prentice Hall, 2001.
[17] SUGIMOTO H, KOYAMAM, TAMAI S. Theory and Application of AC Servo System [M]. New York: General Electronics, 1994: 93−98.
[18] COLEY D A. An introduction to genetic algorithm for scientists and engineers [M]. Singapore: World Scientific Publishing, 1999.
(Edited by DENG Lüxiang)


















