GENERATORS AND RELATIONS FOR SPACE GROUPS
72
GENERATORS AND RELATIONS FOR SPACE GROUPS Eric Lord Bangalore 2010
Transcript of GENERATORS AND RELATIONS FOR SPACE GROUPS

GENERATORS AND RELATIONS
FOR SPACE GROUPS
Eric Lord
Bangalore 2010

Contents
Introduction . . . . 1
Notation . . . . 2
PART I. NON-CUBIC GROUPS
Explanation of the figures . . . . 3
Triclinic . . . . 5
Monoclinic . . . . 5
Orthorhombic . . . . 8
Tetragonal . . . .
Trigonal . . . . 41
Hexagonal . . . . 48
PART II. CUBIC GROUPS
Explanation of the figures . . . . 55
Cubic . . . . 56
Appendix : matrix methods . . . . 69

1
GENERATORS AND RELATIONS FOR SPACE GROUPS
Introduction
In their book Generators and Relations for Discrete Groups Coxeter and Moser listed a
set of algebraic relations satisfied by a minimal set of generators for seventeen abstract
groups isomorphic to the seventeen “wallpaper groups”. The tabulation provided here
does the same thing for the 230 crystallographic space groups. The list of generators
given for each space group in the International Tables for Crystallography is extensive
and, of course, highly redundant. What is given here is a minimal set of generators for
each group and the algebraic relations they satisfy.
Choosing a minimal set of generators for each of the space groups involves considerable
arbitrariness. This arbitrariness is reduced by making use of the space-filling polyhedra
known as asymmetric units. These are space-filling polyhedra that are related to each
other in the tiling of 3D space that they produce, by the various Euclidean
transformations of the group (rotations, reflections, inversions, rotary-inversions, glide-
reflections and screw transformations). For some of the space groups the choice of
asymmetric unit is not unique. An asymmetric unit is essentially a Voronoi region
surrounding a point of general position, and "some general positions are more general
than others". For example, the number of facets of the unit is usually reduced if the point
for which it is a Voronoi region is chosen to lie on the axis of a screw transformation or
rotary-inversion, or on a glide plane. These and other considerations have occasionally
led me to a different choice of asymmetric unit from the one proposed in the
International Tables. The minimal sets of generators have been chosen from those that
map an “asymmetric unit” to a contiguous asymmetric unit sharing a face. However the
unit is chosen, the number of generators of the minimal set is unaffected − that is an
invariant, characteristic of the space group.
For each group our tabulation gives:
(i) the number assigned to the group in the International Tables for Crystallography; its
Hermann-Mauguin symbol; {a list of the chosen generators − a minimal set
followed by additional (redundant) generators that extend the minimal set to a set
that relates an asymmetric unit to all contiguous unit}; generators indicated in the
H-M symbol, expressed in terms of the chosen set;
(ii) a set of generating relations that define the abstract group;
(iii) translations expressed in terms of the chosen generators;
(iv) a particular realization of the generators in terms of Euclidean transformations;
specified in terms of the image of a general point [x, y, z]. For trigonal and
hexagonal groups we employ a hexagonal coordinate system (x and y axes at 2π/3,
z axis perpendicular to them);
(v) a simple diagram of the asymmetric unit.

2
Notation
The type of a generator will frequently be indicated by the letter that denotes it:
X, Y, Z: translations [x + 1, y, z], [x, y + 1, z], [x, y, z + 1].
W : a centering translation. W = [x + ½, y + ½, z + ½] for body-centred. The notations
W1 = [x, y + ½, z + ½], W2 = [x + ½, y, z + ½], and W = W3 = [x + ½, y + ½, z]
will be used for the face-centred cases. The base-centering transformation W means
[x + ½, y + ½, z] unless otherwise specified.
T : the translation [x + 2/3, y + 1/3, z + 1/3] along an edge of the rhombohedral cell in
rhombohedral groups.
S : a screw transformation.
A, B, C, D, N : glide reflections.
The nature of a generator of a cyclic subgroup will be indicated by the letter used to
denote it, according to the following scheme. To avoid constant repetition the generating
relations for these cyclic subgroups will be omitted from the tabulation – but they are
always implied:
I : an inversion I2 = E. Unless otherwise stated, I = [ x , y , z ]
R : a diad rotation R2 = E.
M : a reflection M2 = E.
F : fourfold rotation. F4 = E. Unless otherwise stated, F = [ y , x, z].
F : 4 transformation. F4 = E. Unless otherwise stated, F = [y, x , z ].
Q : [−y, x − y, z] in trigonal or hexagonal groups; [z, x, y] in cubic groups. Q3 = E. In the
cubic groups X = QZQ−1
, Y = QXQ−1
, Z = QYQ−1
.
Q : A 3 transformation. [y, y − x, −z] in trigonal or hexagonal groups; [ z , x , y ] in cubic
groups. Q6 = E. Note that Q
−2 = Q and Q
3 = I.
H : sixfold rotation [x − y, x, z]. H6 = E.
H : A 6 transformation [y − x, −x, −z]. H6 = E

3
PART I. NON-CUBIC GROUPS
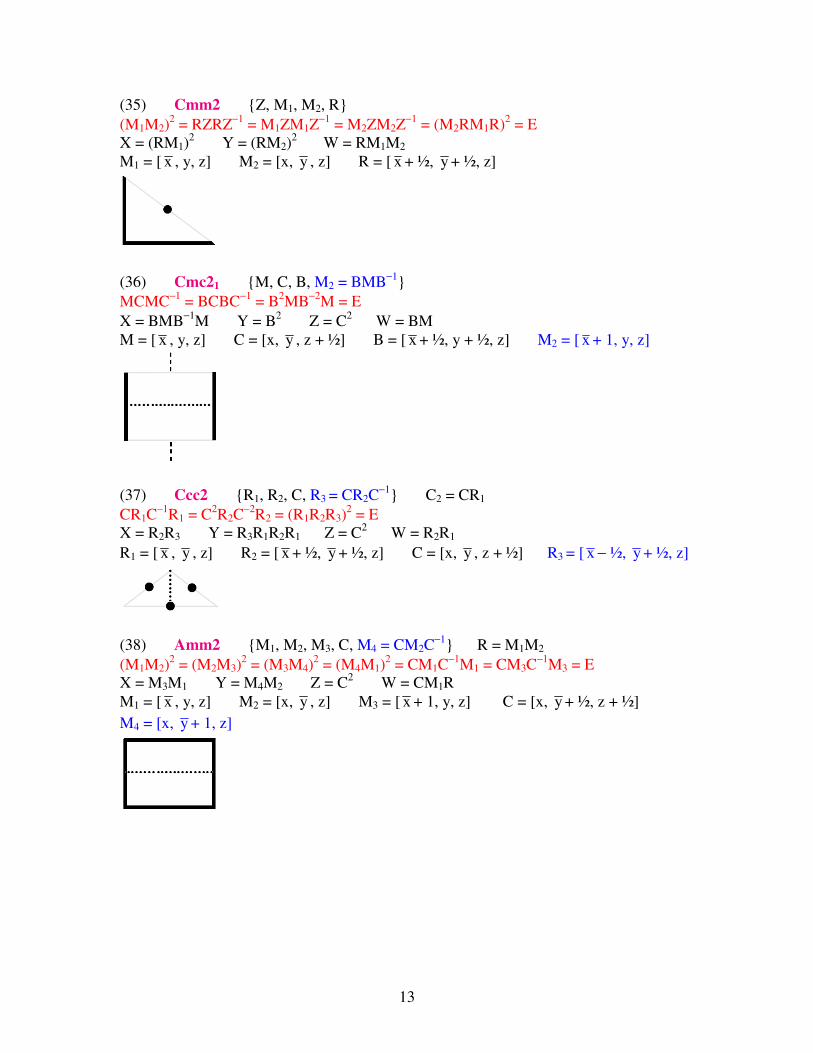
Explanation of the Figures
The figure given with each of the non-cubic space groups represents an asymmetric unit
viewed perpendicularly to the xy plane. The units are various kinds of prisms. The
generators that relate a unit to a contiguous unit are indicated as follows:
a diad axis (R) parallel to the xy plane. When this symbol occurs as an edge
of the figure the axis is half-way between the upper and lower faces of the
unit (typically at z = 0 and z = ½, so that the axis would then be at z = ¼).
When it bisects the figure, it represents two diad axes, on the upper and lower
faces.
a mirror (M) perpendicular to the xy plane
a glide plane perpendicular to the xy plane
a c-glide plane
a d-glide plane
a 21 screw axis parallel to the xy plane (located half way between the upper
and lower faces of the unit).
The symbols and are multi-purpose symbols; their meaning is given by context:
at the mid-point of an edge of the figure represents a diad axis perpendicular to the xy
plane. In the centre of the figure it represents a screw axis perpendicular to the xy plane,
of a type indicated by the overall symmetry of the figure. (Our figures do not distinguish
between enantiomorphic groups − P41 and P43 for example have the same figure. This
causes no confusion because the name of the group makes the distinction!) At a vertex of
the figure represents a rotation axis perpendicular to the xy plane: 3-fold, 4-fold or 6-
fold according to whether the angle at the vertex is 120º, 90º or 60º.
at the mid-point of an edge of the figure represents an inversion centre halfway
between the upper and lower faces of the unit. In the centre of the figure it represents two
inversion centres, on the upper and lower faces. At a vertex of the figure it represents the
centre of a rotary-inversion half way between the upper and lower faces of theunit; the
axis is perpendicular to the xy plane. The transformation is a 3 , a 4 or a 6 according to
whether the angle at the vertex is 60º, 90º or 120º.
A 42 axis is produced by two generators – a 2-fold rotation and a 42 screw transformation,
with a common axis. A special symbol is used to denote this. It was needed for only
three of the groups (77, 94 and 102). (62, 63 and 64 axes are also produced by two
generators but, luckily, no situations arose requiring symbols for these.)
When a figure is shaded in grey, this denotes the existence of two mirrors parallel to the
xy plane, on the upper and lower faces of the unit.

4
Finally, the existence of a translation as one of the generators relating the unit to a
contiguous unit is indicated by a parallel pair of unmarked (very pale grey) edges of the
figure, or, for the Z translation, by the empty interior of the figure.
All this may seem complicated at first. However, once one has become familiar with
these conventions, the extreme simplicity of the figures will be appreciated. All of the
information about a space group is encapsulated, in a coordinate-free manner, in the
figure representing its “asymmetric unit”. In fact, the whole of the “unit cell” diagram for
a space group, given in the International Tables (many of which look quite daunting), can
be rapidly reconstructed from the figure we have assigned to it, once our notation has
become familiar.
All this, of course, applies only to the non-cubic groups. The “asymmetric units” of the
cubic groups are more complicated and do not lend themselves to representation in a 2D
figure.

5
Triclinic
(1) P1 {X, Y, Z}
YZY−1
Z−1
= ZXZ−1
X−1
= XYX−1
Y−1
= E
(2) P 1 {X, Y, I1, I2}
XYX−1
Y−1
= (I1X)2 = (I1Y)
2 = (I2X)
2 = (I2Y)
2 = E
Z = I2I1
I1 = [ x , y , z ] I2 = [ x , y , z + 1]
Monoclinic
(3) P2 { X, Z, R1, R2}
ZXZ−1
X−1
= XR1X−1
R1 = (ZR1)2 = XR2X
−1R2 = (ZR2)
2 = E
Y = R2R1
R1 = [x, y , z ] R2 = [x, y + 1, z ]
(4) P21 {X, Z, S}
ZXZ−1
X−1
= XSXS−1
= ZSZS−1
= E
Y = S2
S = [ x + ½, y + ½, z + ½]
(5) C2 {Z, R, S, R2 = SRS−1
}
RS2RS
−2 = (ZR)
2 = ZSZS
−1 = E
X = R2R Y = S2 W = SR
R = [ x , y, z + ½] S = [ x + ½, y + ½, z + ½] R = [1 + x , y, z + ½]

6
(6) Pm {X, Z, M1, M2}
ZXZ−1
X−1
= M1XM1X−1
= M2XM2X−1
= M1ZM1Z−1
= M2ZM2Z−1
= E
Y = M2M1
M1 = [x, y , z] M2 = [x, y + 1 , z]
(7) Pc {X, Y, C}
XYX−1
Y−1
= CXC−1
X−1
= CYC−1
Y = E
Z = C2
C = [x, y , z + ½]
(8) Cm {Z, M, A, M2 = AMA−1
}
MA2MA
−2 = AZA
−1Z
−1 = MZMZ
−1 = E
X = A2 Y = M2M W3 = AM
M = [x, y , z] A = [x + ½, y + ½ , z] M2 = [x, y + 1, z]
(9) Cc {W, C, Wa = CWC−1
}
WWaW−1
Wa−1
= C2WC
−2W
−1 = E
X = W Wa Y = W Wa−1
Z = C2
C = [x, y , z + ½] Wa = [x + ½, y − ½, z]
(10) P2/m {Z, M1, M2, R1, R2}
M1ZM1Z−1
= M2ZM2Z−1
= (R1Z)2 = (R2Z)
2 = (M1R1)
2 = (M1R2)
2 = (M2R1)
2 = (M2R2)
2 = E
X = R2R1 Y = M2M1
M1 = [x, y , z] M2 = [x, y + 1, z] R1 = [ x , y, z ] R2 = [ x + 1, y, z ]

7
(11) P21/m {Z, M, I1, I2, M2 = I1MI1} S = MI1
M2I2MI2 = (ZI1) = (ZI2) = ZMZ−1
M = ZM2Z−1
M2 = E
X = I2I1 Y = M2M
M = [x, y , z] I1 = [ x , y , z ] I2 =[ x + 1, y , z ] M2 = [x, y + 1, z]
(12) C2/m {Z, R, M, I, R2 = IRI }
(MR)2 = (IR)
2 = MZMZ = (RZ)
2 = (IZ)
2 = E
X = (IR)2 Y = M2M W = IRM
M = [x, y , z] R = [ x , y, z ] I = [ x + ½, y + ½, z ] R2 = [ x + 1, y, x ]
(13) P2/c {Y, R1, R2, C}
CYC−1
Y = (R1C)2 = (R2C)
2 = R1YR1Y
−1 = R2YR2Y
−1 = E
X = R2R1 Z = C2
R1 = [ x , y, z + ½] R2 = [ x + 1, y, z + ½] C = [x, y + 1, z + ½]
(14) P21/c {X, S, C}
(C−1
S)2 = XSXS
−1 = XCX
−1C
−1 = E
Y = S2 Z = C
2
S = [ x + 1, y + ½, z + ½] C = [x, y + ½, z + ½]

8
(15) C2/c {R, C, S, R2 = SRS−1
}
(RC)2 = (SC)
2 = (SC
−1)2 = RS
2RS
−2 = E
X = R2R Y = S2 Z = C
2 W = SR
R = [ x , y, z ] S = [ x + ½, y + ½, z ] C = [x, y , z + ½] R2 = [ x , y, z ]
Orthorhombic
(16) P222 {Z, R1, R2, R3, R4}
(R1R4)2 = (R4R2)
2 = (R2R3)
2 = (R3R1)
2 = (R1Z)
2 = (R2Z)
2 = (R3Z)
2 = (R4Z)
2
X = R2R1 Y = R4R3
R1 = [ x , y, z ] R2 = [ x + 1, y, z ] R3 = [x, y , z ] R4 = [x, y + 1, z ]
(17) P2221 {X, Y, R1, R2} S = R2R1
(R2X)2 = R1XR1X
−1 = (R1Y)
2 = R2YR2Y
−1 = E
Z = S2
R1 = [x, y , z ] R2 = [ x , y, z + ½]
(18) P21212 {Z, S, R, R2 = SRS } S2 = SR
R22 = RZRZ
−1 = SZS
−1Z = E
X = S22 = R2R Y = S
2
R = [ x , y , z] S = [ x + ½, y + ½, z ] R2 = [ x + 1, y , z]
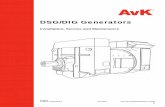
9
(19) P212121 {S1, S3, S4 = S3S1−1
S3} S2 = S3S1
S12S4
−2 = S2
2S3 S2
−2S3
−1 = S3
2S1 S3
−2S1
−1 = S1
2S2 S1
−2S2
−1 = E
X = S12 Y = S2
2 Z = S3
2
S1 = [x + ½, y + ½, z ] S3 = [ x , y , z + ½] S4 = [x + ½, y − ½, z ]
(20) C2221 {R1, R2, W, W2 = R1WR1} S = R2R1
(S2R1)
2 = (S
2R2)
2 = WSWS
−1 = W2SW2S
−1 = W2
2WW2
−2W
−1 = W
2W2W
−2W2
−1 = E
X = WW2 Y = WW2−1
Z = S2
R1 = [x, y , z ] R2 = [ x , y, z + ½]
(21) C222 {Z, R1, R2, R3}
(R1R2)2 = (ZR1)
2 = (ZR2)
2 = ZR3Z
−1R3 = (R3R1R3R2)
2 = E
X = (R3R2)2 Y = (R3R1)
2 W3 = R3R2R1
R1 = [x, y , z ] R2 = [ x , y, z ] R3 = [ x + ½, y + ½, z]
(22) F222 {R1, R2, R3, R4, R5 = R3R1R3, R6 = R2R4R2}
(R1R2)2 = (R2R5)
2 = (R3R4)
2 = (R3R6)
2 = (R5R1R4)
2 = (R4R6R1)
2 = R1R4R5R6 = E
X = (R3R2)2 Y = R5R1 Z = R6R4
W1 = R4R1 W2 = R3 R4 R2 W3 = R3R2R1 R1 = [x, y , z + ½] R2 = [ x , y, z + ½]
R3 = [ x + ½, y + ½, z] R4 = [x, y + ½, z ]
R5 = [x, y + 1, z + ½] R6 = [x, y + ½, z + 1]
10
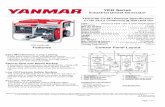
(23) I222 {R1, R2, S, R3 = SR1S, R4 = SR2S } R5 = R1R2
R32 = R4
2 = R5
2 = (R1R2)
2 = (R1R4)
2 = (R2R3)
2 = (R3R4)
2 = E
X = R3R1 Y= R4R2 Z = S2 W = R3R4R5
R1 = [ x , y, z ] R2 = [x, y , z ] S = [ x + ½, y + ½, z + ½]
R3 = [ x + 1, y, z ] R4 = [x, y + 1, z ]
(24) I212121 {R1, R2, R3, R4 = R1R3R1, R5 = R2R4R2, R6 = R2R3R2}
S1 = R3R2 S2 = R3R1 S3 = R1R2
S12R1S1
−2R1 = S2
2R2S2
−2R2 = S3
2R3S3
−2R3 = E
X = S12 Y = S2
2 Z = S3
2 W = S3R4
R1 = [x, y , z + ½] R2 = [ x , y, z ] R3 = [ x + ½, y + ½, z]
R4 = [ x + ½, y − ½, z] R5 = [ x − ½, y − ½, z] [ x − ½, y + ½, z]
(25) Pmm2 {Z, M1, M2, M3, M4} R = M1M2
(M1M2)2 = (M2M3)
2 = (M3M4)
2 =
M1ZM1Z−1
= M2ZM2Z−1
= M3ZM3Z−1
= M4ZM4Z−1
= E
X = M4M2 Y = M3M1
M1 = [x, y , z] M2 = [ x , y, z] M3 = [x, y + 1, z] M4 = [ x + 1, y, z]
(26) Pmc21 {Y, M1, M2, C} S = M1C
M1CM1C−1
= M2CM2C−1
= M1YM1Y−1
= M2YM2Y−1
= CYC−1
Y = E
X =M2M1 Z = C2
M1 = [ x , y, z] M2 = [ x + 1, y, z] C = [x, y , z + ½]

11
(27) Pcc2 {X, C, R1, R2} C2 = R1C
R1CR1C−1
= R2CR2C−1
= (R1X)2 = (R2X)
2 = CXC
−1X = E
Y = R2R1 Z = C2
C = [ x , y, z + ½] R1 = [ x , y , z] R2 = [ x , y + 1, z]
(28) Pma2 {Z, M, R1, R2, M2 = R1MR1} A = R1M
MZMZ−1
= M2ZM2Z−1
= R1ZR1Z−1
= R2ZR2Z−1
= R2R1MR1R2M = E
X = M2M Y = R2R1
M = [ x , y, z] R1 = [ x + ½, y , z] R2 = [ x + ½, y + 1, z] M2 = [ x + 1, y, z]
(29) Pca21 {Y, C, A} S = A−1
C
ACAC−1
= CYC−1
Y−1
= AYA−1
Y = E
X = A2 Z = C
2
A = [x + ½, y , z] C = [ x + ½, y, z + ½]
(30) Pnc2 {X, C, R, R2 = CRC−1
} N = CR
(RX)2 = CXC
−1X
−1 = C
2RC
−2R = E
Y = R2R Z = C2
R = [ x , y , z] C = [x, y + ½, z + ½] R2 = [ x , y + 1, z]

12
(31) Pmn21 {Y, M, S, M2 = SMS−1
} N = SM
SYS−1
Y = S2MS
−2M = MYMY
−1 = E
X = M2M Z = S2
M = [ x , y, z] S = [ x + ½, y + ½, z + ½] M2 = [ x + 1, y, z]
(32) Pba2 {Z, B, A} R = A−1
B
AZA−1
Z−1
= BZB−1
Z−1
= (AB)2 = (AB
−1)2 = E
X = A2 Y = B
2
B = [ x + ½, y + ½, z] A = [x + ½, y + ½, z]
(33) Pna21 {A, S, A2 = SA−1
S−1
} N = SA
A2SA
−2S
−1 = S
2AS
−2A
−1 = E
X = A2 Y = AA2
−1 Z = S
2
A = [x + ½, y + ½, z] S = [ x + ½, y + ½, z + ½] A = [x + ½, y − ½, z]
(34) Pnn2 {Z, N, R} N2 = NR
NZN−1
Z−1
= RZRZ−1
= E
X = Z−1
N22 Y = Z
−1N
2
R = [ x , y , z] N = [x + ½, y + ½, z + ½]
13
(35) Cmm2 {Z, M1, M2, R}
(M1M2)2 = RZRZ
−1 = M1ZM1Z
−1 = M2ZM2Z
−1 = (M2RM1R)
2 = E
X = (RM1)2 Y = (RM2)
2 W = RM1M2
M1 = [ x , y, z] M2 = [x, y , z] R = [ x + ½, y + ½, z]
(36) Cmc21 {M, C, B, M2 = BMB−1
}
MCMC−1
= BCBC−1
= B2MB
−2M = E
X = BMB−1
M Y = B2 Z = C
2 W = BM
M = [ x , y, z] C = [x, y , z + ½] B = [ x + ½, y + ½, z] M2 = [ x + 1, y, z]
(37) Ccc2 {R1, R2, C, R3 = CR2C−1
} C2 = CR1
CR1C−1
R1 = C2R2C
−2R2 = (R1R2R3)
2 = E
X = R2R3 Y = R3R1R2R1 Z = C2 W = R2R1
R1 = [ x , y , z] R2 = [ x + ½, y + ½, z] C = [x, y , z + ½] R3 = [ x − ½, y + ½, z]
(38) Amm2 {M1, M2, M3, C, M4 = CM2C−1
} R = M1M2
(M1M2)2 = (M2M3)
2 = (M3M4)
2 = (M4M1)
2 = CM1C
−1M1 = CM3C
−1M3 = E
X = M3M1 Y = M4M2 Z = C2 W = CM1R
M1 = [ x , y, z] M2 = [x, y , z] M3 = [ x + 1, y, z] C = [x, y + ½, z + ½]
M4 = [x, y + 1, z]

14
(39) Abm2 {M, R1, R2, C, M2 = R1MR1} B = R1M
M2CMC−1
= M2C−1
MC = M2R2MR2 = R1CR1C−1
= R2CR2C−1
= C2MC
−2M = E
X = R2R1 Y = B2 Z = C
2 W1 = MC
M = [x, y , z] R1 = [ x , y + ½, z] R2 = [ x + 1, y + ½, z] C = [x, y + ½, z + ½]
M2 = [x, y + 1, z]
(40) Ama2 {M, R, S, M2 = RMR, R2 = SRS−1
} A = MR
M2SMS−1
= (MSMRS−1
)2 = S
2RS
−2R = S
2MS
−2M = (MR)
2S(MR)
2S
−1 = E
X = M2M Y = R2R Z = S2 W1 = SR
R = [ x + ½, y , z] M = [ x , y, z] S = [ x + ½, y + ½, z + ½]
M2 = [ x + 1, y, z] R2 = [ x + ½, y + 1, z]
(41) Aba2 {B, A, C} R = A−1
C
ACA−1
C−1
= BCBC−1
= (AB−1
)2 = (BA
−1)2 = E
X = A2 Y = B
2 Z = C
2 W1 = BC
A = [x + ½, y + ½, z] B = [ x + ½, y + ½, z] C = [ x + ½, y, z + ½]
(42) Fmm2 {M1, M2, R, C, M3 = RM1R}
M3CMC−1
= (M1M2)2 = M2CM2C
−1 = CRC
−1R = M1C
2M1C
−2 = RM1RCM1C
−1 = E
X = (RM1)2 Y = (RM2)
2 Z = C
2
W1 = RM2C W2 = CM1 W3 = RM1M2
M1 = [ x , y, z] M2 = [x, y , z] R = [ x + ½, y + ½, z] C = [ x + ½, y, z + ½]
M3 = [ x + 1, y, z]
15
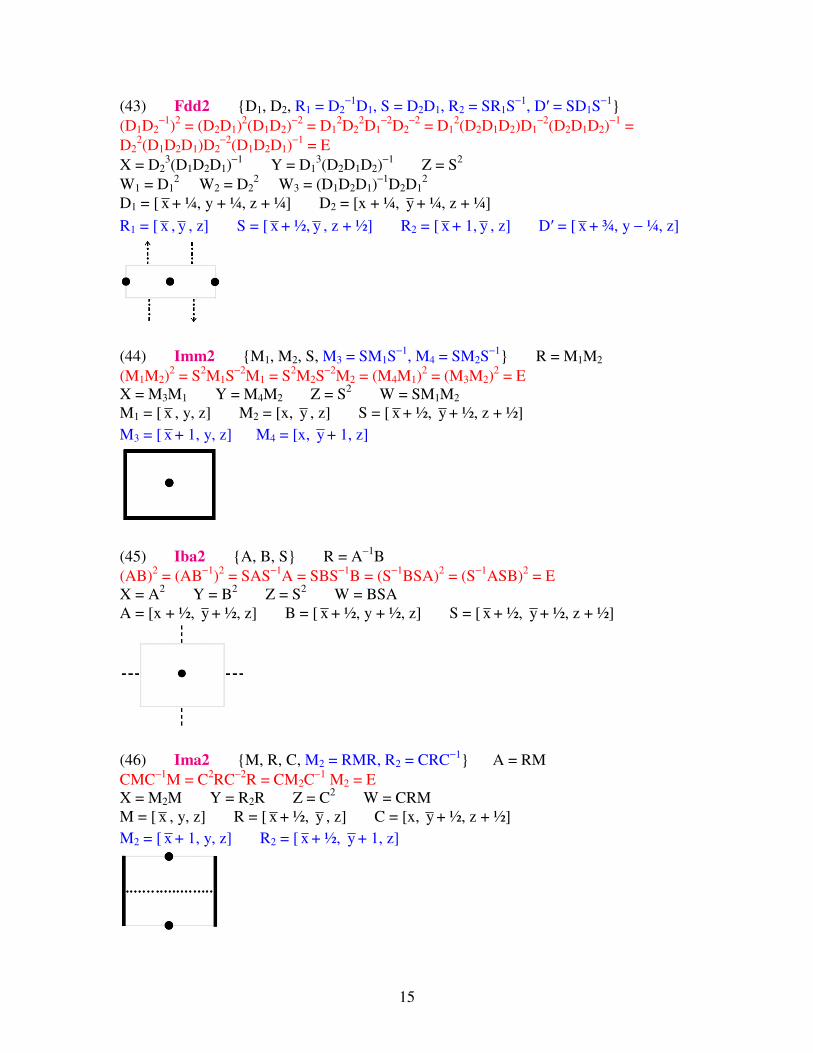
(43) Fdd2 {D1, D2, R1 = D2−1
D1, S = D2D1, R2 = SR1S−1
, D′ = SD1S−1
}
(D1D2−1
)2 = (D2D1)
2(D1D2)
−2 = D1
2D2
2D1
−2D2
−2 = D1
2(D2D1D2)D1
−2(D2D1D2)
−1 =
D22(D1D2D1)D2
−2(D1D2D1)
−1 = E
X = D23(D1D2D1)
−1 Y = D1
3(D2D1D2)
−1 Z = S
2
W1 = D12 W2 = D2
2 W3 = (D1D2D1)
−1D2D1
2
D1 = [ x + ¼, y + ¼, z + ¼] D2 = [x + ¼, y + ¼, z + ¼]
R1 = [ x , y , z] S = [ x + ½, y , z + ½] R2 = [ x + 1, y , z] D′ = [ x + ¾, y − ¼, z]
(44) Imm2 {M1, M2, S, M3 = SM1S−1
, M4 = SM2S−1
} R = M1M2
(M1M2)2 = S
2M1S
−2M1 = S
2M2S
−2M2 = (M4M1)
2 = (M3M2)
2 = E
X = M3M1 Y = M4M2 Z = S2 W = SM1M2
M1 = [ x , y, z] M2 = [x, y , z] S = [ x + ½, y + ½, z + ½]
M3 = [ x + 1, y, z] M4 = [x, y + 1, z]
(45) Iba2 {A, B, S} R = A−1
B
(AB)2 = (AB
−1)2 = SAS
−1A = SBS
−1B = (S
−1BSA)
2 = (S
−1ASB)
2 = E
X = A2 Y = B
2 Z = S
2 W = BSA
A = [x + ½, y + ½, z] B = [ x + ½, y + ½, z] S = [ x + ½, y + ½, z + ½]
(46) Ima2 {M, R, C, M2 = RMR, R2 = CRC−1
} A = RM
CMC−1
M = C2RC
−2R = CM2C
−1 M2 = E
X = M2M Y = R2R Z = C2 W = CRM
M = [ x , y, z] R = [ x + ½, y , z] C = [x, y + ½, z + ½]
M2 = [ x + 1, y, z] R2 = [ x + ½, y + 1, z]
16
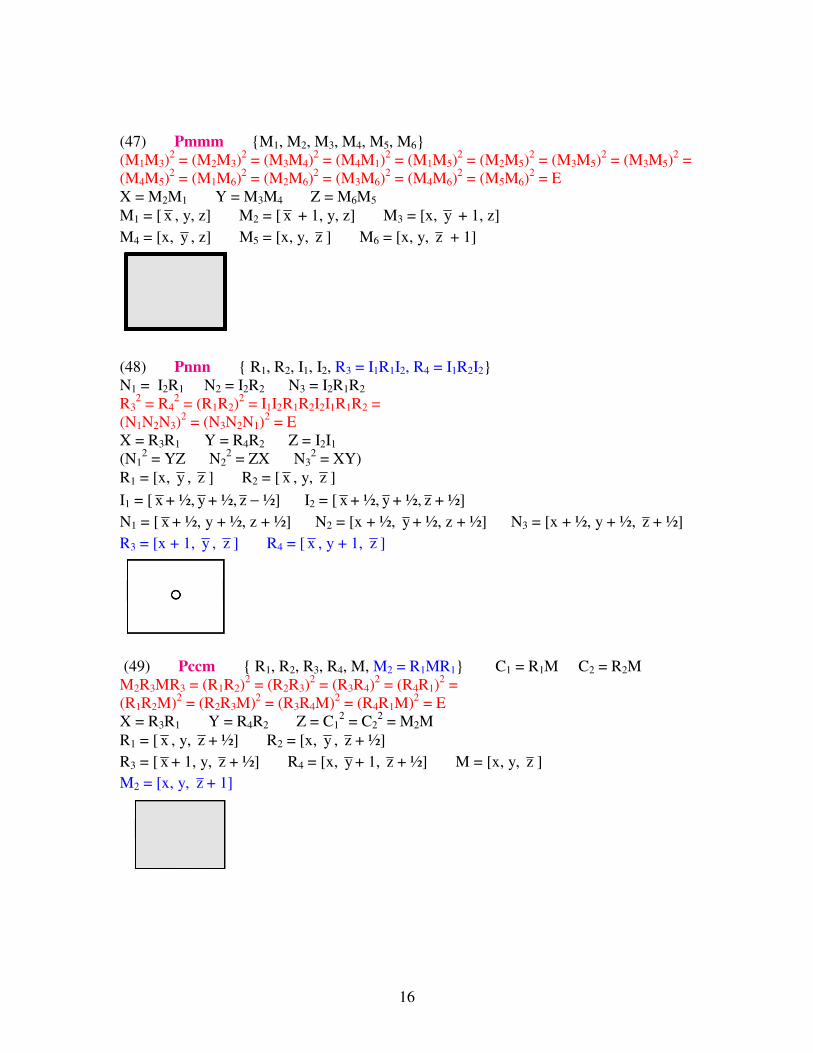
(47) Pmmm {M1, M2, M3, M4, M5, M6}
(M1M3)2 = (M2M3)
2 = (M3M4)
2 = (M4M1)
2 = (M1M5)
2 = (M2M5)
2 = (M3M5)
2 = (M3M5)
2 =
(M4M5)2 = (M1M6)
2 = (M2M6)
2 = (M3M6)
2 = (M4M6)
2 = (M5M6)
2 = E
X = M2M1 Y = M3M4 Z = M6M5
M1 = [ x , y, z] M2 = [ x + 1, y, z] M3 = [x, y + 1, z]
M4 = [x, y , z] M5 = [x, y, z ] M6 = [x, y, z + 1]
(48) Pnnn { R1, R2, I1, I2, R3 = I1R1I2, R4 = I1R2I2}
N1 = I2R1 N2 = I2R2 N3 = I2R1R2
R32 = R4
2 = (R1R2)
2 = I1I2R1R2I2I1R1R2 =
(N1N2N3)2 = (N3N2N1)
2 = E
X = R3R1 Y = R4R2 Z = I2I1
(N12 = YZ N2
2 = ZX N3
2 = XY)
R1 = [x, y , z ] R2 = [ x , y, z ]
I1 = [ x + ½, y + ½, z − ½] I2 = [ x + ½, y + ½, z + ½]
N1 = [ x + ½, y + ½, z + ½] N2 = [x + ½, y + ½, z + ½] N3 = [x + ½, y + ½, z + ½]
R3 = [x + 1, y , z ] R4 = [ x , y + 1, z ]
(49) Pccm { R1, R2, R3, R4, M, M2 = R1MR1} C1 = R1M C2 = R2M
M2R3MR3 = (R1R2)2 = (R2R3)
2 = (R3R4)
2 = (R4R1)
2 =
(R1R2M)2 = (R2R3M)
2 = (R3R4M)
2 = (R4R1M)
2 = E
X = R3R1 Y = R4R2 Z = C12 = C2
2 = M2M
R1 = [ x , y, z + ½] R2 = [x, y , z + ½]
R3 = [ x + 1, y, z + ½] R4 = [x, y + 1, z + ½] M = [x, y, z ]
M2 = [x, y, z + 1]

17
(50) Pban {Z, R1, R2, I} B = IR1 A = IR2 N = IR1R2
(R1R2)2 = (AB
2 = (ABN)
2 = (IZ)
2 = (R1Z)
2 = (R2Z)
2 = E
X = B2 Y = A
2
R1 = [ x , y, z ] R2 = [x, y , z ] I = [ x + ½, y + ½, z ]
(51) Pmma {M1, M2, M3, R1, R2, M4 = R1M2R1} A = R1M2
(M1M2)2 = (M2M3)
2 = (M3M4)
2 = (M4M1)
2 = (R1M1)
2 = (R1M3)
2 = (R2M1)
2 = (R2M3)
2 =
M4R2M2R2 = E
X = M4M2 Y = M3M1 Z = R2R1
M1 = [x, y , z] M2 = [ x , y, z] M3 = [x, y + 1, z]
R1 = [ x + ½, y, z ] R2 = [ x + ½, y, z + 1] M4 = [ x + 1, y, z]
(52) Pnna {R1, R2, I1, I2, R3 = R2R1R2, R4 = I1R2I1}
N1 = R3I1 N2 = I1 R2 R1 A = I1R2
R4I2R2I2 = R3R4R1R4 = R4R2R1R2R4R1 = (R1I1I2)2 = E
X = R4R2 Y = R3R1 Z = I2I1
R1 = [x, y , z + ½] R2 = [ x , y + ½, z]
I1 = [ x + ½, y + ½, z ] I2 = [ x + ½, y + ½, z + 1]
R3 = [x, y + 1, z + ½] R4 = [ x + 1, y + ½, z]
(53) Pmna {Y, M, R1, R2, M2 = R1MR1} N = R1R2YM A = R1M
(MR2)2 = YMY
−1M = YR1Y
−1R1 = (YR2)
2 = (M2R2)
2= E
X = M2M Z = (R1R2)2
M = [ x , y, z] R1 = [ x + ½, y, z + ½] R2 = [x, y + 1, z ] M2 = [ x + 1, y, z]
18
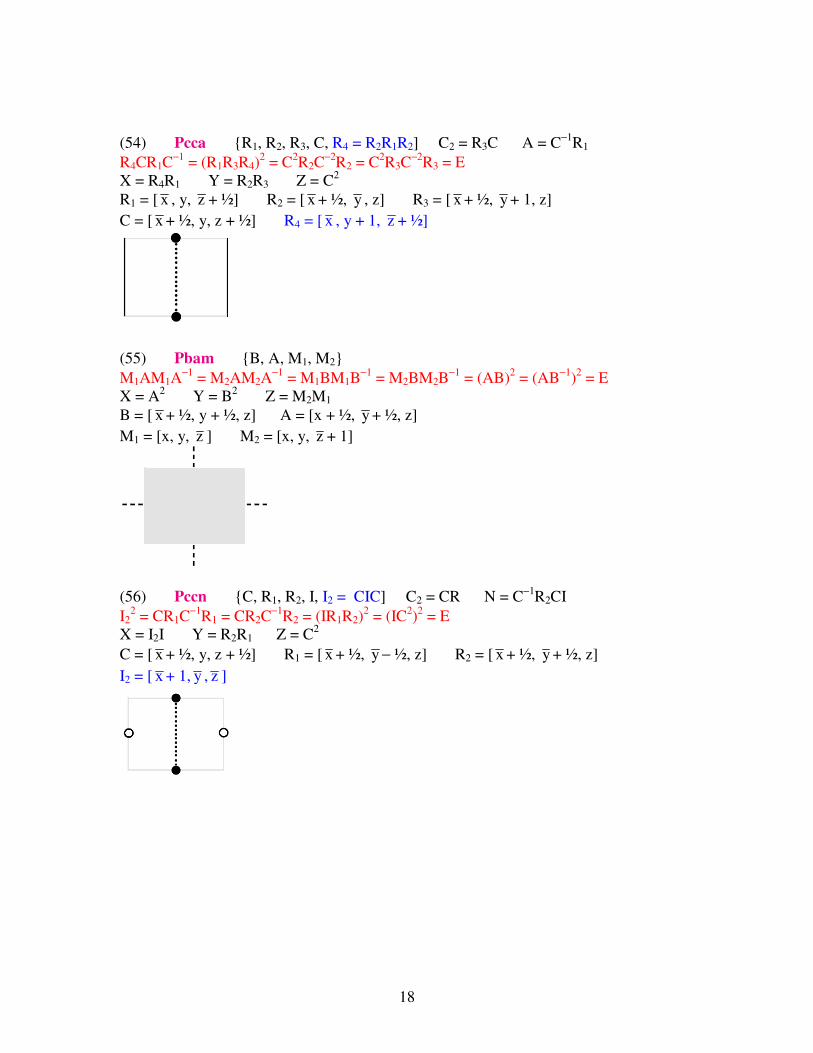
(54) Pcca {R1, R2, R3, C, R4 = R2R1R2] C2 = R3C A = C−1
R1
R4CR1C−1
= (R1R3R4)2 = C
2R2C
−2R2 = C
2R3C
−2R3 = E
X = R4R1 Y = R2R3 Z = C2
R1 = [ x , y, z + ½] R2 = [ x + ½, y , z] R3 = [ x + ½, y + 1, z]
C = [ x + ½, y, z + ½] R4 = [ x , y + 1, z + ½]
(55) Pbam {B, A, M1, M2}
M1AM1A−1
= M2AM2A−1
= M1BM1B−1
= M2BM2B−1
= (AB)2 = (AB
−1)2 = E
X = A2 Y = B
2 Z = M2M1
B = [ x + ½, y + ½, z] A = [x + ½, y + ½, z]
M1 = [x, y, z ] M2 = [x, y, z + 1]
(56) Pccn {C, R1, R2, I, I2 = CIC] C2 = CR N = C−1
R2CI
I22 = CR1C
−1R1 = CR2C
−1R2 = (IR1R2)
2 = (IC
2)2 = E
X = I2I Y = R2R1 Z = C2
C = [ x + ½, y, z + ½] R1 = [ x + ½, y − ½, z] R2 = [ x + ½, y + ½, z]
I2 = [ x + 1, y , z ]

19
(57) Pbcm {M, R, I1, I2, M2 = I1MI1, R2 = I1RI1] B = I1R C = I1M
M2RMR = M2I2MI2 = M2R2MR2 = R2I2RI2 = RR2M2M = E
X = I2I1 Y = B2 Z = C
2
M = [x, y, z ] R = [x, y , z + ½]
I1 = [ x , y + ½, z + ½] I2 = [ x + 1, y + ½, z + ½]
M2 = [x, y, z + 1] R2 = [x, y + 1, z + ½]
(58) Pnnm {M, S1, S2, M2 = S1MS1−1
} N1 = S2M N2 = S1M
M2S2MS2−1
= (S1−1
S2)2 = (S1S2)
2 = (S1S2M)
2 = (S1
−1S2M)
2 = E
X = S12 Y = S2
2 Z = M2M
M = [x, y, z ] S1 = [x + ½, y + ½, z + ½] S2 = [ x + ½, y + ½, z + ½]
M2 = [x, y, z + 1]
(59) Pmmn {Z, M1, M2, I} N = IM1M2
(M1M2)2 = (IM1IM2)
2 = (IM1M2IM1IM2)
2 = M1ZM1Z
−1 = M2ZM2Z
−1 = (IZ)
2 = E
X = (IM1)2 Y = (IM2)
2
M1 = [ x , y, z] M2 = [x, y , z] I = [ x + ½, y + ½, z ]
(60) Pbcn {B, S1, S2} C = S2B N = S2B−1
S1
(S2S1)2 = (S2S1
−1)2 = BS2BS2
−1 = (BS1)
2 = (BS1
−1)2 = E
X = S12 Y = B
2 Z = S2
2
S1 = [x + ½, y + ½, z ] S2 = [ x + ½, y + ½, z + ½] B = [ x + ½, y + ½, z]

20
(61) Pbca {B, C, A}
BCBC−1
= CACA−1
= ABAB−1
= (ABC)2 = (CBA)
2 = E
X = A2 Y = B
2 Z = C
2
A = [x + ½, y, z + ½] B = [ x + ½, y + ½, z] C = [x, y + ½, z + ½]
(62) Pnma {M, I, S, M2 = IMI, I2 = SIS } N = MS A = SI
I22 = M2SMS
−1 = (I2M2M)
2 = MI2I1MI1I2) = (IS
2)2 = S
2MS
−2M = E
X = I2I Y = M2M Z = S2
M = [x, y , z] I = [ x , y + ½, z + ½] S = [ x + ½, y + ½, z + ½]
M2 = [x, y +1, z] I2 = [ x + 1, y + ½, z + ½]
(63) Cmcm {M1, M2, R, I, M3 = IM2I } C = M2R
M3RM2R = (M1M2)2 = (M1M3)
2 = (M1R)
2 = (IM1IR)
2 = E
X = (IM1)2 Y = (RI)
2 Z = M2M3 W = IM1R
M1 = [ x , y, z] M2 = [x, y, z ] R = [x, y , z + ½] I = [ x + ½, y + ½, z + ½]
M3 = [x, y, z + 1]
(64) Cmca {M, C, R, I, R2 = IRI} A = CIM
IRICRC = (RM)2 = (IRIM)
2 = CMC
−1M = CIC
−1I = (C
2RIR)
2 = E
X = (IM)2 Y = (IR)
2 Z = C
2 W = IMR
M = [ x , y, z] C = [x, y + ½, z + ½]
R = [x, y , z + ½] I = [ x + ½, y + ½, z + ½] R2 = [x, y + 1, z + ½]
21
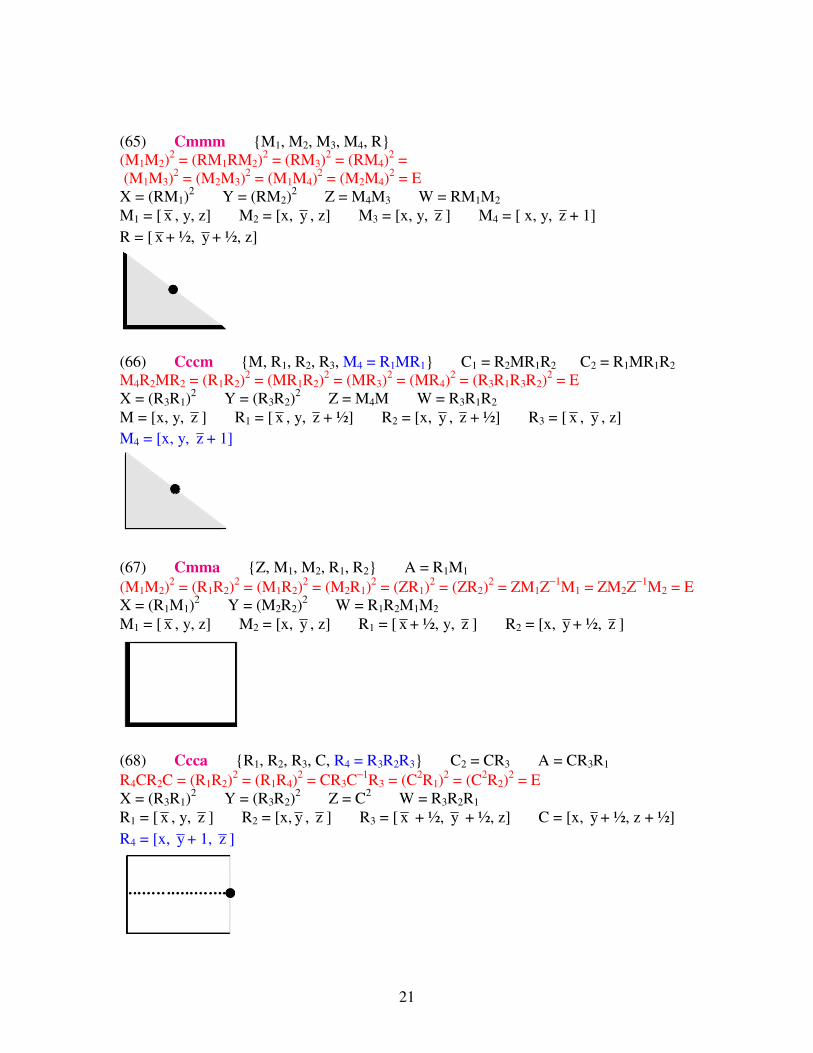
(65) Cmmm {M1, M2, M3, M4, R}
(M1M2)2 = (RM1RM2)
2 = (RM3)
2 = (RM4)
2 =
(M1M3)2 = (M2M3)
2 = (M1M4)
2 = (M2M4)
2 = E
X = (RM1)2 Y = (RM2)
2 Z = M4M3 W = RM1M2
M1 = [ x , y, z] M2 = [x, y , z] M3 = [x, y, z ] M4 = [ x, y, z + 1]
R = [ x + ½, y + ½, z]
(66) Cccm {M, R1, R2, R3, M4 = R1MR1} C1 = R2MR1R2 C2 = R1MR1R2
M4R2MR2 = (R1R2)2 = (MR1R2)
2 = (MR3)
2 = (MR4)
2 = (R3R1R3R2)
2 = E
X = (R3R1)2 Y = (R3R2)
2 Z = M4M W = R3R1R2
M = [x, y, z ] R1 = [ x , y, z + ½] R2 = [x, y , z + ½] R3 = [ x , y , z]
M4 = [x, y, z + 1]
(67) Cmma {Z, M1, M2, R1, R2} A = R1M1
(M1M2)2 = (R1R2)
2 = (M1R2)
2 = (M2R1)
2 = (ZR1)
2 = (ZR2)
2 = ZM1Z
−1M1 = ZM2Z
−1M2 = E
X = (R1M1)2 Y = (M2R2)
2 W = R1R2M1M2
M1 = [ x , y, z] M2 = [x, y , z] R1 = [ x + ½, y, z ] R2 = [x, y + ½, z ]
(68) Ccca {R1, R2, R3, C, R4 = R3R2R3} C2 = CR3 A = CR3R1
R4CR2C = (R1R2)2 = (R1R4)
2 = CR3C
−1R3 = (C
2R1)
2 = (C
2R2)
2 = E
X = (R3R1)2 Y = (R3R2)
2 Z = C
2 W = R3R2R1
R1 = [ x , y, z ] R2 = [x, y , z ] R3 = [ x + ½, y + ½, z] C = [x, y + ½, z + ½]
R4 = [x, y + 1, z ]

22
(69) Fmmm {M1, M2, M3, R1, R2, M4 = R1M3R1}
M4R2M3R2 = (M2M3)2 = (M3M1)
2 = (M1M2)
2 = (R1R2)
2 = (R1M2)
2 = (R2M1)
2 =
(R1R2M3)2 = E
X = (R1M1)2 Y = (R2M2)
2 Z = M4M3 W = R1R2M2M1
M1 = [ x , y, z] M2 = [x, y , z] M3 = [x, y, z ]
R1 = [ x + ½, y, z + ½] R2 = [x, y + ½, z + ½] M4 = [x, y, z + 1]
(70) Fddd {D1, D2, D3,
S = D2D1, R1 = D2−1
D1, R2 = SR1S−1
, R3 = D3−1
D2, R4 = D3D1−1
, D′ = SD1S−1
}
SR3R4 = (D2D3−1
)2 = (D3D1
−1)2 = (D1D2
−1)2 = (D1D2D3
−1)2 = (D1D2D3)
2 = (D2D1D3)
2 =
D22D3
2D2
−2D3
−2 = D3
2D1
2D3
−2D1
−2 = D1
2D2
2D1
−2D2
−2 = E
X = (D2D3)2 Y = (D3D1)
2 Z = (D1D2)
2
W1 = D12 W2 = D2
2 W3 = D3
2
D1 = [ x + ¼, y + ¼, z + ¼] D2 = [x + ¼, y + ¼, z + ¼] D3 = [x + ¼, y + ¼, z + ¼]
R1 = [ x , y , z] S = [ x + ½, y , z + ½] R2 = [ x + 1, y , z]
R3 = [x, y , z ] R4 = [ x + ½, y, z + ½] D′ = [ x + ¾, y − ¼, z]
(71) Immm {M1, M2, M3, I, M4 = IM3I }
(M1M2)2 = (M2M3)
2 = (M3M1)
2 = (IM1IM2)
2 = (IM2IM3)
2 = (IM3IM1)
2 = E
X = (IM1)2 Y = (IM2)
2 Z = M4M3 W = IM3M2M1
M1 = [ x , y, z] M2 = [x, y , z] M3 = [x, y, z ]
I = [ x + ½, y + ½, z + ½] M4 = [x, y, z + 1]
23
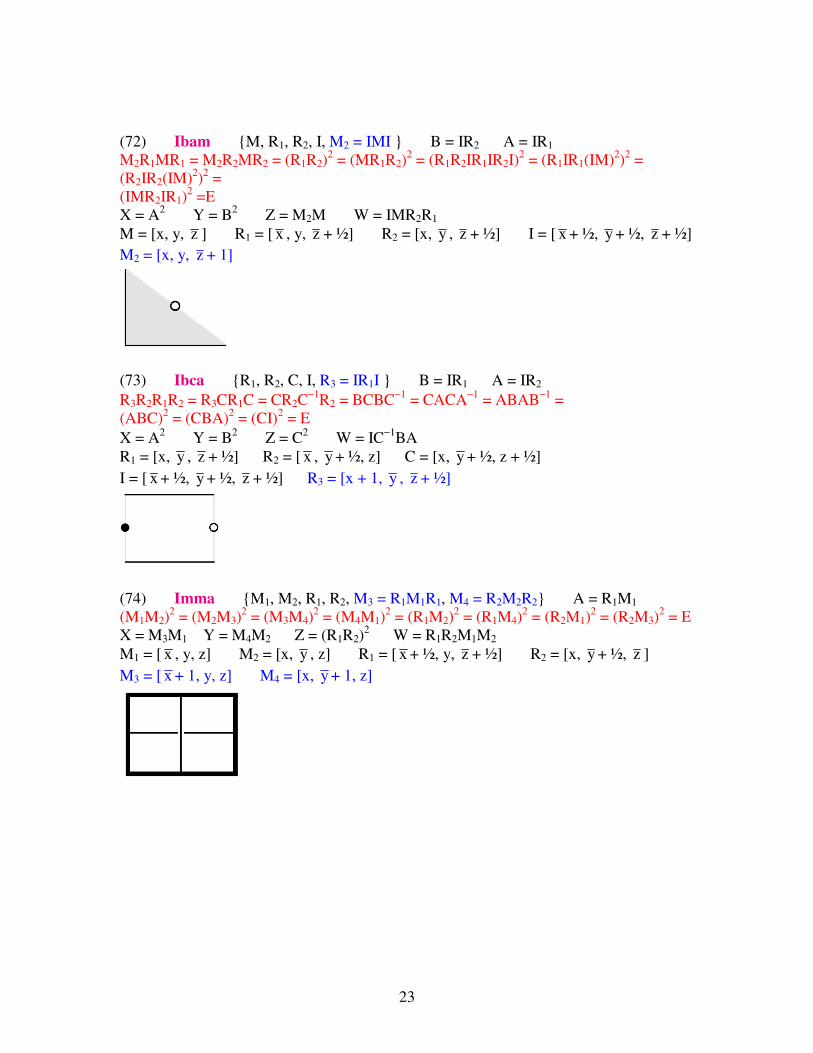
(72) Ibam {M, R1, R2, I, M2 = IMI } B = IR2 A = IR1
M2R1MR1 = M2R2MR2 = (R1R2)2 = (MR1R2)
2 = (R1R2IR1IR2I)
2 = (R1IR1(IM)
2)2 =
(R2IR2(IM)2)2 =
(IMR2IR1)2 =E
X = A2 Y = B
2 Z = M2M W = IMR2R1
M = [x, y, z ] R1 = [ x , y, z + ½] R2 = [x, y , z + ½] I = [ x + ½, y + ½, z + ½]
M2 = [x, y, z + 1]
(73) Ibca {R1, R2, C, I, R3 = IR1I } B = IR1 A = IR2
R3R2R1R2 = R3CR1C = CR2C−1
R2 = BCBC−1
= CACA−1
= ABAB−1
=
(ABC)2 = (CBA)
2 = (CI)
2 = E
X = A2 Y = B
2 Z = C
2 W = IC
−1BA
R1 = [x, y , z + ½] R2 = [ x , y + ½, z] C = [x, y + ½, z + ½]
I = [ x + ½, y + ½, z + ½] R3 = [x + 1, y , z + ½]
(74) Imma {M1, M2, R1, R2, M3 = R1M1R1, M4 = R2M2R2} A = R1M1
(M1M2)2 = (M2M3)
2 = (M3M4)
2 = (M4M1)
2 = (R1M2)
2 = (R1M4)
2 = (R2M1)
2 = (R2M3)
2 = E
X = M3M1 Y = M4M2 Z = (R1R2)2 W = R1R2M1M2
M1 = [ x , y, z] M2 = [x, y , z] R1 = [ x + ½, y, z + ½] R2 = [x, y + ½, z ]
M3 = [ x + 1, y, z] M4 = [x, y + 1, z]

24
Tetragonal
(75) P4 {Z, R, F}
ZFZ−1
F−1
= ZRZ−1
R = (RF−1
)4 = E
X = RF2 Y = FRF
R = [ x + 1, y , z]
(76) P41 {X, S, Y = SXS−1
)
XS2XS
−2 = E
Y = SXS−1
Z = S4
S = [ y , x, z + ¼]
(77) P42 {R1, R2, S, Y = SR2R1S−1
}
R1SR1S−1
= R2R1S2R2R1S
−2 = (R2R1SR2 S
−1)2 = E
X = R2R1 Y = SR2R1S−1
Z = R1S2
R1 = [ x , y , z] R2 = [ x + 1, y , z] S = [ y , x, z + ½]
(78) P43 {X, S, Y = SX−1
S−1
}
XS2XS
−2 = E
Y = SX−1
S−1
Z = S4
S = [y, x , z + ¼]

25
(79) I4 {F, S, F2 = SFS−1
}
(FF2)2 = S
2FS
−2F
−1 = E
X = F2F−1
Y = F2−1
F Z = S2 W = SF
2
S = [ x + ½, y + ½, z + ½] F2 = [ y + 1, x, z]
(80) I41 {R, S, R2 = SRS−1
, R3 = S−1
RS, R4 = S2RS
−2}
R1R2R3R4 = (RR3R2)2 = RS
4RS
−4 = E
X = R2R Y = R4R Z = S4 W = S
2R
R = [ x , y , z] S = [ y + ½, x, z + ¼]
R2 = [ x + 1, y , z] R3 = [ x + 1, y + 1, z] R4 = [ x , y + 1, z]
(81) P 4 { F , Z, R}
(R F )4 = (R F )
2(R F
−1)2 = RZRZ
−1 = F Z F
−1Z = E
X = R F2 Y = R2 F
2
R = [ x + 1, y , z]
(82) I 4 { F , W, R, F 2 = W F W−1
}
(R F )4 = (W F )
4 = R(W F
2)2R(W F
2)−2
= F (W F2)2F
−1(W F
2)−2
= (W F2)2( F
2W)
−2 = E
X = R F2 Y = F R F Z = (W F
2)2
R = [ x + 1, y , z] F 2 = [y, x + 1, z ]
26
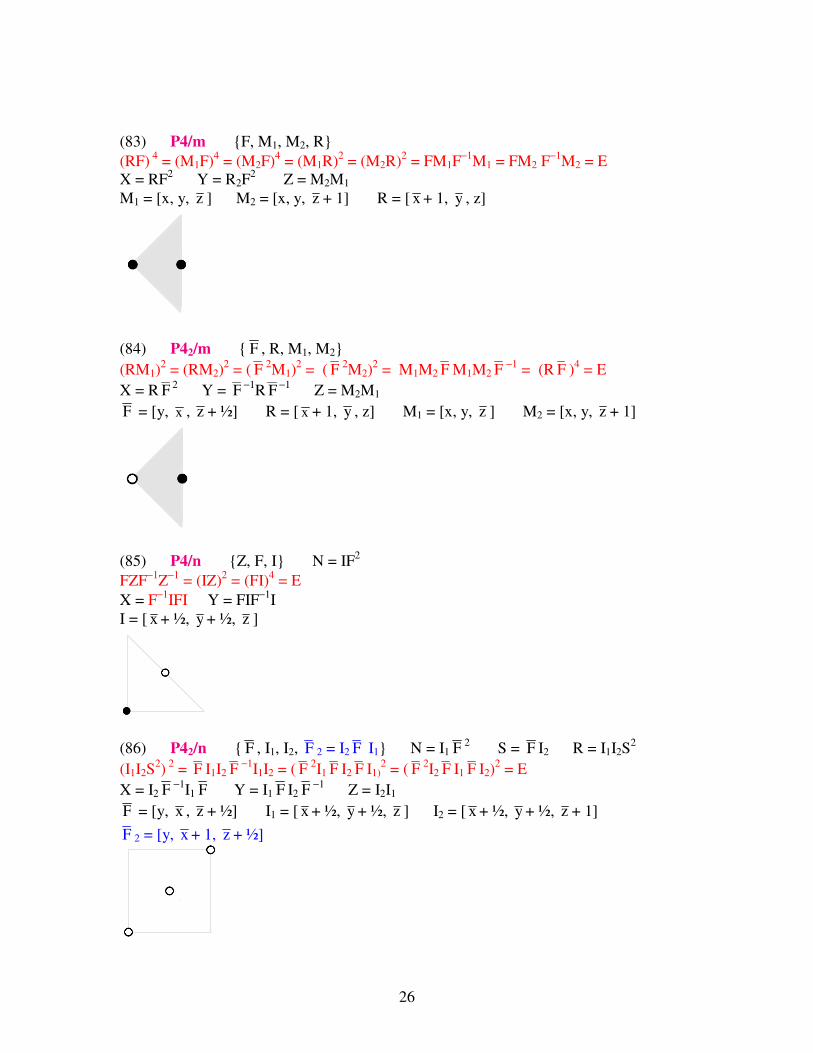
(83) P4/m {F, M1, M2, R}
(RF) 4
= (M1F)4 = (M2F)
4 = (M1R)
2 = (M2R)
2 = FM1F
−1M1 = FM2 F
−1M2 = E
X = RF2 Y = R2F
2 Z = M2M1
M1 = [x, y, z ] M2 = [x, y, z + 1] R = [ x + 1, y , z]
(84) P42/m { F , R, M1, M2}
(RM1)2 = (RM2)
2 = ( F
2M1)
2 = ( F
2M2)
2 = M1M2 F M1M2 F
−1 = (R F )
4 = E
X = R F2 Y = F
−1R F
−1 Z = M2M1
F = [y, x , z + ½] R = [ x + 1, y , z] M1 = [x, y, z ] M2 = [x, y, z + 1]
(85) P4/n {Z, F, I} N = IF2
FZF−1
Z−1
= (IZ)2 = (FI)
4 = E
X = F−1
IFI Y = FIF−1
I
I = [ x + ½, y + ½, z ]
(86) P42/n { F , I1, I2, F 2 = I2 F I1} N = I1 F2 S = F I2 R = I1I2S
2
(I1I2S2) 2
= F I1I2 F−1
I1I2 = ( F2I1 F I2 F I1)
2 = ( F
2I2 F I1 F I2)
2 = E
X = I2 F−1
I1 F Y = I1 F I2 F−1
Z = I2I1
F = [y, x , z + ½] I1 = [ x + ½, y + ½, z ] I2 = [ x + ½, y + ½, z + 1]
F 2 = [y, x + 1, z + ½]

27
(87) I4/m {F, M, I, M2 = IMI}
(IF)4 = MFMF
−1 = M2FM2F
−1 = (FIF
−1M2M)
2 = E
X = IFIF−1
Y = IF−1
IF Z = M2M W = IMF2
M = [x, y, z ] I = [ x + ½, y + ½, z + ½]
M2 = [x, y, z + 1]
(88) I41/a {S, F , F 2 = S F S } A = F S
X = A2 Y = F 2 F Z = S
4 W = F S
−2F
S = [ y , x + ½, z + ¼] F = [y, x , z ] F 2 = [y, x + 1, z ]
(89) P422 {Z, R1, R2, R3} F = R3R1
(R1R2)2 = (R2R3)
4 = (R3R1)
4 = (R2R3R1)
2 = (R1Z)
2 = (R2Z)
2 = (R3Z)
2 = E
X = R2R3R1R3 Y = R3R2R3R1
R1 = [x, y , z ] R2 = [ x , y, z ] R3 = [y, x , z ]
(90) P4212 {Z, F, R} S = RF
(RZ)2 = (RF)
4 = FZF
−1Z = (F
−1RFR)
2 = E
X = (RF−1
)2 Y = S
2
R = [ y + ½, x + ½, z ]

28
(91) P4122 {X, R1, R2, Y = R2X−1
R2} S = R2R1
(R1X)2 = (XR2)
2(X
−1R2)
2 = (X(R2R1)
2R2)
2 = E
Y = R2X−1
R2 Z = S2
R1 = [ x , y, z ] R2 = [ y , x , z + ¼]
(92) P41212 {S1, S2, S3 = S12S2
−1S1
2} R = S2S1
−1
S22S3
−2 = (S1S2
−1)2 = (S1S2)
2 = (S1S3
−1)2 = (S1S3)
2 = S1
4S2
2S1
−4S2
−2 = E
X = S1S2−2
S1−1
Y = S22 Z = S1
4
S1 = [ y , x, z + ¼] S2 = [ x + ½, y + ½, z + ½] S3 = [ x + ½, y − ½, z + ½]
(93) P4222 {R1, R2, R3, R4, R5, R6 = R2R5R1} S = R5R2
(R2R5R1)2 = (R1R2)
2 = (R2R3)
2 = (R3R4)
2 = (R4R1)
2 =
(R3R4R5)2 = (R3R4R6)
2 = (R3R6R5)
2 = R4R2R5R2R5R2R4R5R2R5 = E
X = R3R1 Y = R4R2 Z = R5R6
R1 = [ x , y, z ] R2 = [x, y , z ] R3 = [ x + 1, y, z ] R4 = [x, y + 1, z ]
R5 = [y, x, z + ½] R6 = [y, x, z − ½]
(94) P42212 {R1, R2, R3, S}
(R1R2)2 = (R3R2R3R1)
2 = SR3S
−1R3 = R1R3R2S
2R1R3R2S
−2 = R1R2R3S
2R1R2R3S
−2 = E
X = R3R2R1 Y = R1R3R2 Z = S2R3
R1 = [y, x, z ] R2 = [ y , x , z ] R3 = [ x + 1, y , z] S = [ y + ½, x − ½, z + ½]
29
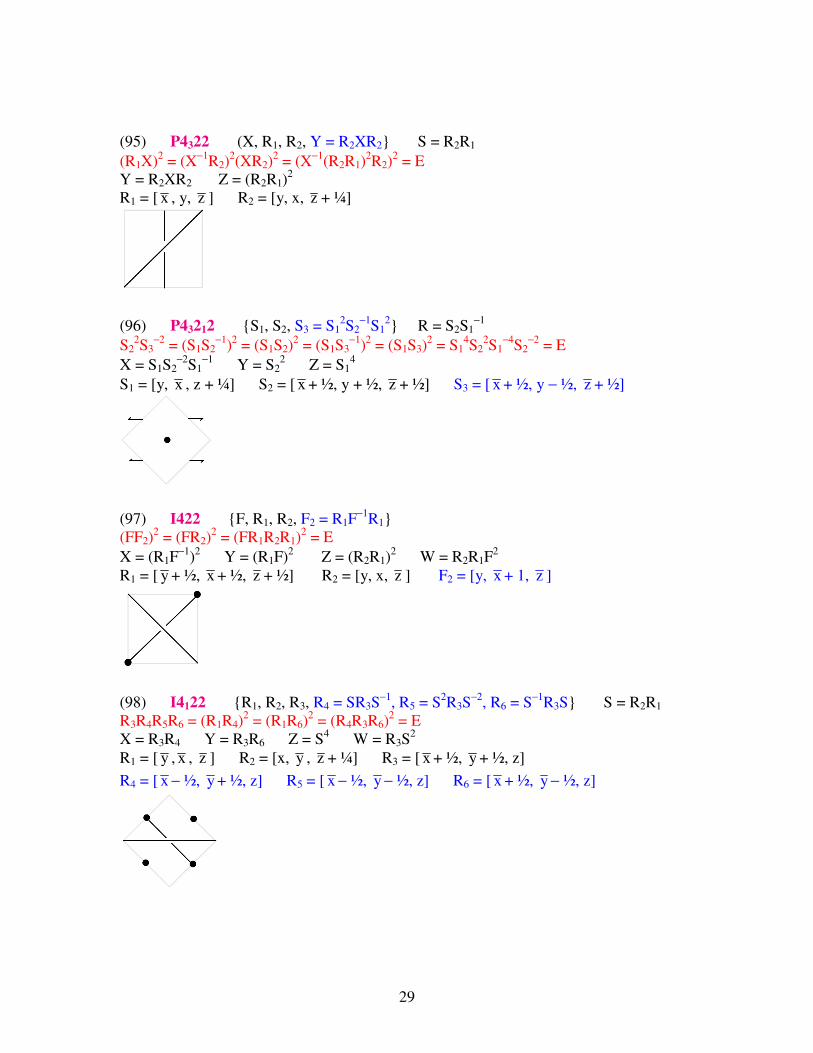
(95) P4322 (X, R1, R2, Y = R2XR2} S = R2R1
(R1X)2 = (X
−1R2)
2(XR2)
2 = (X
−1(R2R1)
2R2)
2 = E
Y = R2XR2 Z = (R2R1)2
R1 = [ x , y, z ] R2 = [y, x, z + ¼]
(96) P43212 {S1, S2, S3 = S12S2
−1S1
2} R = S2S1
−1
S22S3
−2 = (S1S2
−1)2 = (S1S2)
2 = (S1S3
−1)2 = (S1S3)
2 = S1
4S2
2S1
−4S2
−2 = E
X = S1S2−2
S1−1
Y = S22 Z = S1
4
S1 = [y, x , z + ¼] S2 = [ x + ½, y + ½, z + ½] S3 = [ x + ½, y − ½, z + ½]
(97) I422 {F, R1, R2, F2 = R1F−1
R1}
(FF2)2 = (FR2)
2 = (FR1R2R1)
2 = E
X = (R1F−1
)2 Y = (R1F)
2 Z = (R2R1)
2 W = R2R1F
2
R1 = [ y + ½, x + ½, z + ½] R2 = [y, x, z ] F2 = [y, x + 1, z ]
(98) I4122 {R1, R2, R3, R4 = SR3S−1
, R5 = S2R3S
−2, R6 = S
−1R3S} S = R2R1
R3R4R5R6 = (R1R4)2 = (R1R6)
2 = (R4R3R6)
2 = E
X = R3R4 Y = R3R6 Z = S4 W = R3S
2
R1 = [ y , x , z ] R2 = [x, y , z + ¼] R3 = [ x + ½, y + ½, z]
R4 = [ x − ½, y + ½, z] R5 = [ x − ½, y − ½, z] R6 = [ x + ½, y − ½, z]

30
(99) P4mm {Z, M1, M2, M3} F = M1M3
(M1M2)2 = (M2M3)
4 = (M3M1)
4 = M1ZM1Z
−1 = M2ZM2Z
−1 = M3ZM3Z
−1 = E
X = M3M2M3M1 Y = M3M1M3M2
M1 = [ x , y, z] M2 = [x, y , z] M3 = [ x + ½, y + ½, z]
(100) P4bm {Z, M, F} B = MF
(MFMF−1
)2 = ZMZ
−1M = ZFZ
−1F
−1 = E
X = (MF−1
)2 Y = B
2
M = [ y + ½, x + ½, z] F = [ y , x, z]
(101) P42cm {M, R, C} S = CM
CRC−1
R = (MCMC−1
)2 = (RCMC
−1RM)
2 = E
X = RC−1
RMCM Y = MRC−1
RMC Z = C2
M = [y, x, z] R = [ x + 1, y , z] C = [x, y , z + ½]
(102) P42nm {M1, M2, R, S}
(M1M2)2 = SRS
−1R = (RM2RM1)
2 = RM1M2S
2RM1M2S
−2 = M2RM1S
2M2RM1S
−2 = E
X = RM1M2 Y = M1RM2 Z = RS2
M1 = [y, x, z] M2= [ x , y , z] R = [ x + 1, y , z] S = [ y + ½, x + ½, z + ½]
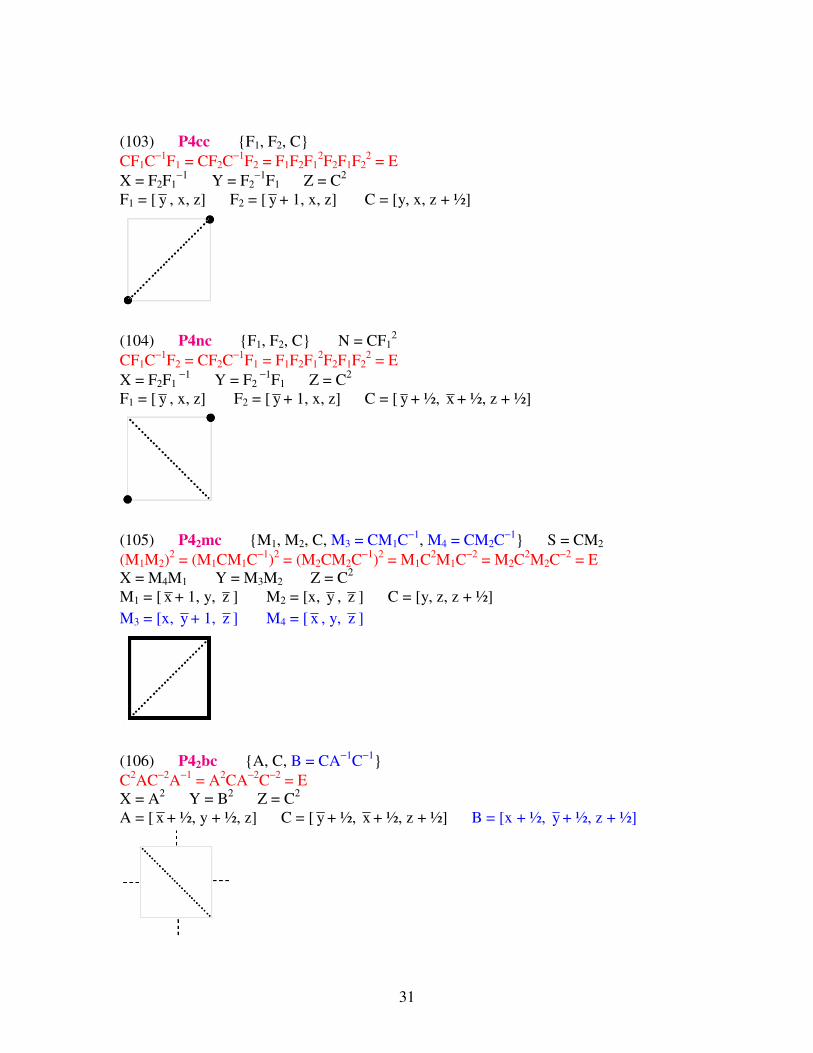
31
(103) P4cc {F1, F2, C}
CF1C−1
F1 = CF2C−1
F2 = F1F2F12F2F1F2
2 = E
X = F2F1−1
Y = F2−1
F1 Z = C2
F1 = [ y , x, z] F2 = [ y + 1, x, z] C = [y, x, z + ½]
(104) P4nc {F1, F2, C} N = CF12
CF1C−1
F2 = CF2C−1
F1 = F1F2F12F2F1F2
2 = E
X = F2F1 −1
Y = F2 −1
F1 Z = C2
F1 = [ y , x, z] F2 = [ y + 1, x, z] C = [ y + ½, x + ½, z + ½]
(105) P42mc {M1, M2, C, M3 = CM1C−1
, M4 = CM2C−1
} S = CM2
(M1M2)2 = (M1CM1C
−1)2 = (M2CM2C
−1)2 = M1C
2M1C
−2 = M2C
2M2C
−2 = E
X = M4M1 Y = M3M2 Z = C2
M1 = [ x + 1, y, z ] M2 = [x, y , z ] C = [y, z, z + ½]
M3 = [x, y + 1, z ] M4 = [ x , y, z ]
(106) P42bc {A, C, B = CA−1
C−1
}
C2AC
−2A
−1 = A
2CA
−2C
−2 = E
X = A2 Y = B
2 Z = C
2
A = [ x + ½, y + ½, z] C = [ y + ½, x + ½, z + ½] B = [x + ½, y + ½, z + ½]

32
(107) I4mm {M1, M2, C, M3 = CM1C−1
} F = M2M1
(M2M1)4 = (CM1C
−1M1)
2 = CM2C
−1M2 = C
2M1C
−2M1 = E
X = CM1C−1
M2M1M2 Y = M2CM1C−1
M2M1 Z = C2 W = CM1M2M1
M1 = [x, y , z] M2 = [y, x, z] C = [ y + ½, x + ½, z + ½] M3 = [ x , y, z]
(108) I4cm {F, C, M}
CMC−1
M = FCFC−1
= (FMF−1
M)2 = E
X = (MF−1
)2 Y = (MF)
2 Z = C
2 W = F
2CM
C = [y, x, z + ½] M = [ y + ½, x + ½, z]
(109) I41md {M, S, M2 = SMS−1
, M3 = S2MS
−2, M4 = S
−1MS } D = MS
(MSMS−1
)2 = S
4MS
−4M = E
X = S2MS
−2M Y = S
−1MS
2MS
−1 Z = S
4 W = D
2
M = [ x , y, z] S = [ y + ½, x, z + ¼]
M2 = [x, y , z] M3 = [ x + 1, y, z] M4 = [x, y + 1, z]
(110) I41cd {A, S, B = S−1
AS}
(AB)2 = (AB
−1)2 = S
4AS
−4A
−1 = E
X = A2 Y = B
2 Z = S
4 W = AB
−1S
2 = ASA
−1S
A = [x + ½, y + ½, z] S = [y + ½, x , z + ¼] B = [ x + ½, y + ½, z]

33
(111) P 4 2m {Z, R1, R2, M} F = MR1
(R1R2)2 = (R1M)
4 = (R2M)
4 = (R1Z)
2 = (R2Z)
2 = MZMZ
−1 = E
X = R1MR2M Y = R2MR1M
R1 = [ x + 1, y, z ] R2 = [x, y , z ] M = [y, x, z]
(112) P 4 2c {R1, R2, C, R3 = CR2C−1
, R4 = CR1C−1
} F = R2C
(C2R1)
2 = (C
2R2)
2 = (R1C)
4 = (R2C)
4 = E
X = R1R3 Y = R4R2 Z = C2
R1 = [ x + 1, y, z + ½] R2 = [x, y , z + ½] C = [y, x, z + ½]
R3 = [ x , y, z + ½] R4 = [ x + 1, y, z + ½]
(113) P 4 21m { F , Z, M} S = M F−1
(M F M F−1
)2 = MZMZ
−1 = Z F
−1Z F = E
X = (M F )2 Y = (M F
−1)2
M = [ y + ½, x + ½, z]
(114) P 4 21c { F , C, F 2 = C F C} S = C F
(C F C F−1
)2 = F C
2F
−1C
2 = E
X = (C F )2 Y = (C F
−1)2 Z = C
2
C = [ y + ½, x + ½, z + ½] F 2 = [ y , x + 1, z]

34
(115) P 4 m2 {Z, M1, M2, R} F = M1R
(M1M2)2 = (M1R)
4 = (M2R)
4 = M1ZM1Z
−1 = M2ZM2Z
−1 = (RZ)
2 = E
X = M2RM1R Y = RM2RM1
M1 = [x, y , z] M2 = [ x + 1, y, z] R = [y, x, z ]
(116) P 4 c2 { F , R, C}
RCRC−1
= F2C F
2C
−1 = ( F R)
4 = ( F C)
2 = E
X = F2R Y = F R F Z = C
2
R = [ x + 1, y , z] C = [ x , y, z + ½]
(117) F 4 b2 {Z, F , R, } B = R F−1
( F R F−1
R)2 = F Z F
−1Z = (RZ)
2 = E
X = (R F )2 Y = B
2
R = [ y + ½, x + ½, z ]
(118) P 4 n2 { F , R1, R2, F 2 = R2 F−1
R1} N = F R2
( F R1R2)4 = ( F R1 F
−1R2)
2 = F R2R1 F
−1R2R1 = F R1R2 F
−1R1R2 = E
X = R2 F R1 F Y = F−1
R2 F R1 F2 Z = R2R1
R1 = [ y + ½, x + ½, z − ½] R2 = [ y + ½, x + ½, z + ½]
F 2 = [ y , x + 1, z]
35
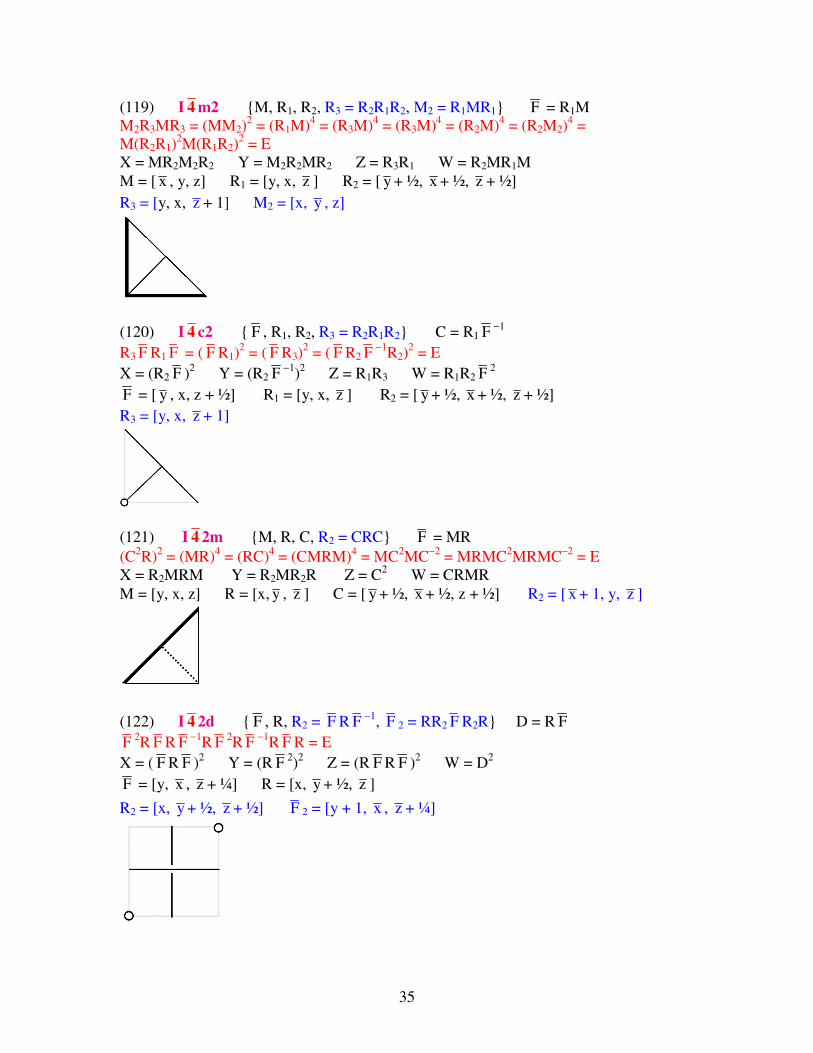
(119) I 4 m2 {M, R1, R2, R3 = R2R1R2, M2 = R1MR1} F = R1M
M2R3MR3 = (MM2)2 = (R1M)
4 = (R3M)
4 = (R3M)
4 = (R2M)
4 = (R2M2)
4 =
M(R2R1)2M(R1R2)
2 = E
X = MR2M2R2 Y = M2R2MR2 Z = R3R1 W = R2MR1M
M = [ x , y, z] R1 = [y, x, z ] R2 = [ y + ½, x + ½, z + ½]
R3 = [y, x, z + 1] M2 = [x, y , z]
(120) I 4 c2 { F , R1, R2, R3 = R2R1R2} C = R1 F−1
R3 F R1 F = ( F R1)2 = ( F R3)
2 = ( F R2 F
−1R2)
2 = E
X = (R2 F )2 Y = (R2 F
−1)2 Z = R1R3 W = R1R2 F
2
F = [ y , x, z + ½] R1 = [y, x, z ] R2 = [ y + ½, x + ½, z + ½]
R3 = [y, x, z + 1]
(121) I 4 2m {M, R, C, R2 = CRC} F = MR
(C2R)
2 = (MR)
4 = (RC)
4 = (CMRM)
4 = MC
2MC
−2 = MRMC
2MRMC
−2 = E
X = R2MRM Y = R2MR2R Z = C2 W = CRMR
M = [y, x, z] R = [x, y , z ] C = [ y + ½, x + ½, z + ½] R2 = [ x + 1, y, z ]
(122) I 4 2d { F , R, R2 = F R F−1
, F 2 = RR2 F R2R} D = R F
F2R F R F
−1R F
2R F
−1R F R = E
X = ( F R F )2 Y = (R F
2)2 Z = (R F R F )
2 W = D
2
F = [y, x , z + ¼] R = [x, y + ½, z ]
R2 = [x, y + ½, z + ½] F 2 = [y + 1, x , z + ¼]
36
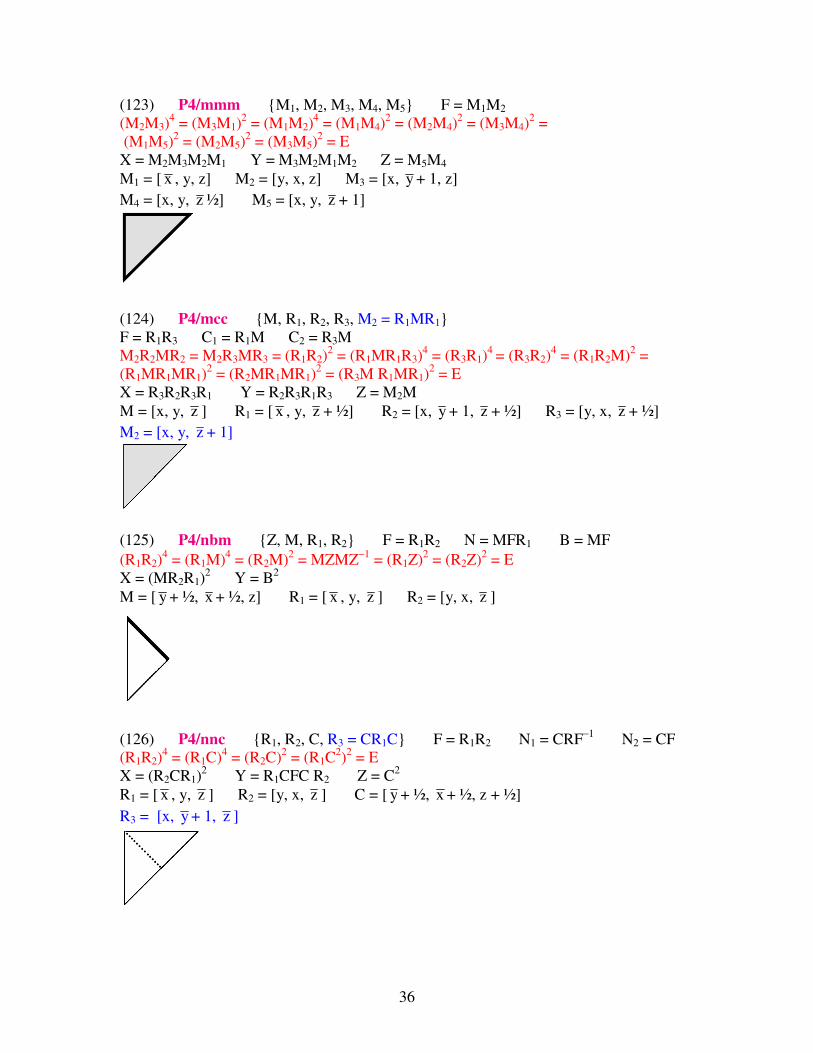
(123) P4/mmm {M1, M2, M3, M4, M5} F = M1M2
(M2M3)4 = (M3M1)
2 = (M1M2)
4 = (M1M4)
2 = (M2M4)
2 = (M3M4)
2 =
(M1M5)2 = (M2M5)
2 = (M3M5)
2 = E
X = M2M3M2M1 Y = M3M2M1M2 Z = M5M4
M1 = [ x , y, z] M2 = [y, x, z] M3 = [x, y + 1, z]
M4 = [x, y, z ½] M5 = [x, y, z + 1]
(124) P4/mcc {M, R1, R2, R3, M2 = R1MR1}
F = R1R3 C1 = R1M C2 = R3M
M2R2MR2 = M2R3MR3 = (R1R2)2 = (R1MR1R3)
4 = (R3R1)
4 = (R3R2)
4 = (R1R2M)
2 =
(R1MR1MR1)2 = (R2MR1MR1)
2 = (R3M R1MR1)
2 = E
X = R3R2R3R1 Y = R2R3R1R3 Z = M2M
M = [x, y, z ] R1 = [ x , y, z + ½] R2 = [x, y + 1, z + ½] R3 = [y, x, z + ½]
M2 = [x, y, z + 1]
(125) P4/nbm {Z, M, R1, R2} F = R1R2 N = MFR1 B = MF
(R1R2)4 = (R1M)
4 = (R2M)
2 = MZMZ
−1 = (R1Z)
2 = (R2Z)
2 = E
X = (MR2R1)2 Y = B
2
M = [ y + ½, x + ½, z] R1 = [ x , y, z ] R2 = [y, x, z ]
(126) P4/nnc {R1, R2, C, R3 = CR1C} F = R1R2 N1 = CRF−1
N2 = CF
(R1R2)4 = (R1C)
4 = (R2C)
2 = (R1C
2)2 = E
X = (R2CR1)2 Y = R1CFC R2 Z = C
2
R1 = [ x , y, z ] R2 = [y, x, z ] C = [ y + ½, x + ½, z + ½]
R3 = [x, y + 1, z ]

37
(127) P4/mbm {F, M1, M2, M3} B = M2F
(M2M3)2 = (M1M2)
2 = M1FM1F
−1 = (M2FM2F
−1)2 = (FM3)
4 = FM3F
−1M3 = E
X = (M2F−1
)2 Y = (M2F)
2 Z = M3M1
M1 = [x, y, z ] M2 = [ y + ½, x + ½, z] M3 = [x, y, z + 1]
(128) P4/mnc {F, M, R, M2 = RMR } N = RMF C = RM
(FRF−1
R)2 = FMF
−1M = FRMRF
−1RMR = E
X = (RF−1
)2 Y = (RF)
2 Z = M2M
M = [x, y, z ] R = [ y + ½, x + ½, z + ½] M2 = [x, y, z + 1]
(129) P4/nmm {Z, M1, M2, R} F = M2M1 N = R1FM2
RM2RR2MR2 = (RM1)2 = (RM2)
4 = (R2M1)
2 = (M1 RM2R)
2 = (M1M2)
4 = (R RM2R)
4 =
(R2 RM2R)4 = (M2 RM2R)
4 = R2RM2RR2M2 = E
X = M1 RM2RM1M2 Y = M1M2M1 RM2R
M1 = [y, x, z] M2 = [ x , y, z]
R = [ y + ½, x + ½, z ] R2 = [ y + ½, x + ½, z + 1]
(130) P4/ncc {F, R, C} N = RF2C
(RC2)2 = FC
2F
−1C
−2 = F
2CF
−2C
−1 = F
2(RFRF
−1R)F
2(RF
−1RFR) = E
X = (RF)2 Y = (FR)
2 Z = C
2 = C2
2
R = [y + ½, x + ½, z + ½] C = [y, x, z + ½]

38
(131) P42/mmc {M1, M2, M3, R, M4 = RM3R} C = RM3
(M1R)4 = (M2R)
4 = (M1M2)
2 = (M1M3)
2 = (M2M3)
2 = (M1M4)
2 = (M2M4)
2 = (RM4)
2 =
(M1M2M3)2 = (M1M2M4)
2 = E
X = RM2RM1 Y = RM1RM2 Z = C2
M1 = [ x , y, z] M2 = [x, y , z] M3 = [x, y, z ] R = [y + ½, x + ½, z + ½]
M4 = [x, y, z + 1]
(132) P42/mcm {M1, M2, R1, R2, M3 = R1M2R1} C = R1M2 S = M1C
M3R2M2R2 = (R1R2)2 = (M1M2)
2 = (M1M3)
2 = (R1M1)
4 = (R2M1)
4 = (R1R2M2)
2 = E
X = R2M1R1M1 Y = R1M1R2M1 Z = C2
M1 = [y, x, z] M2 = [x, y, z ] R1 = [x, y , z + ½] R2 = [ x + 1, y, z + ½]
M3 = [x, y, z + 1]
(133) P42/nbc {R1, R2, C, R3 = CR2C} N = C−1
R2R1R2 B = C−1
R2R1
(CR2C)2 = (R1C)
2 = (R2C
2)2 = E
X = C2R1R2R1 Y = C
2R1R3R1 Z = C
2
R1 = [y, x, z ] R2 = [x, y , z + ½] C = [ y + ½, x + ½, z + ½]
R3 = [x, y + 1, z + ½]
(134) P42/nnm {M, R1, R2, R3, R4 = R3R1R2} N1 = R3R1MR1 N2 = R1R3M
(R1R4)2 = (R1M)
4 = (R4M)
4 = (R2M)
2 = (R3M)
2 = (R1R2R3)
2 = (MR1MR2R3)
2 = E
X = R4MR1M Y = MR4MR1 Z = R3R2
M = [y, x, z]
R1 = [x, y , z + ½] R2 = [ y + ½ , x + ½, z ] R3 = [ y + ½, x + ½, z + 1]
R4 = [ x + 1, y, z + ½]

39
(135) P42/mbc { F , M, R, M2 = RMR} S = F−1
M B = R F−1
C = RM
M2 F M F−1
= ( F2M)
2 = F C
2F
−1C
2 = F
2(R F R F
−1R) F
2(R F
−1R F R) = (RC
2)2 = E
X = (R F )2 Y = B
2 Z = C
2
M = [x, y, z ] R = [ y + ½, x + ½, z + ½] M2 = [x, y, z + 1]
(136) P42/mnm { F , M1, M2, M3 = F M2 F−1
S = F−1
M2 N = M1 F−1
M2
(M1M2)2 = (M1M3)
2 = ( F M1 F )
2 = ( F
2M2)
2 = ( F
2M3)
2 =
F2(M1 F M1 F
−1M1) F
2(M1 F
−1M1 F M1) = (M1M2M3)
2 = (M1 F M2 F M2)
2 = E
X = (M1 F )2 Y = (M1 F
−1)2 Z = M3M2
F = [y, x , z + ½] M1 = [ y + ½, x + ½, z] M2 = [x, y, z ] M3 = [x, y, z + 1]
(137) P42/nmc {R, M, C, M2 = CMC−1
} S = MC−1
N = RMCM
(RM)4 = (RC)
2 = (MM2)
2 = (C
2MR)
4 = MC
2MC
−2 = E
X = (MCR)2 Y = (RMC)
2 Z = C
2
R = [ y + ½, x + ½, z + ½] M = [ x , y, z] C = [y, x, z + ½] M2 = [x, y , z]
(138) P42/ncm {R, C, M, R2 = CRC, M2 = CMC−1
} S = CM N = MR1R2
(R1R2)2 = (RM)
2 = (R2M2)
2 = (MM2)
2 = (RC
2)2 = MC
2MC
−2 = (MRC
2)2 = E
X = (MC−1
R)2 Y = (RMC)
2 Z = C
2
R = [y, x, z + ½] C = [x, y , z + ½] M = [ y + ½, x + ½, z]
R2 = [ y , x , z + ½] M2 = [ y + ½, x − ½, z]
40
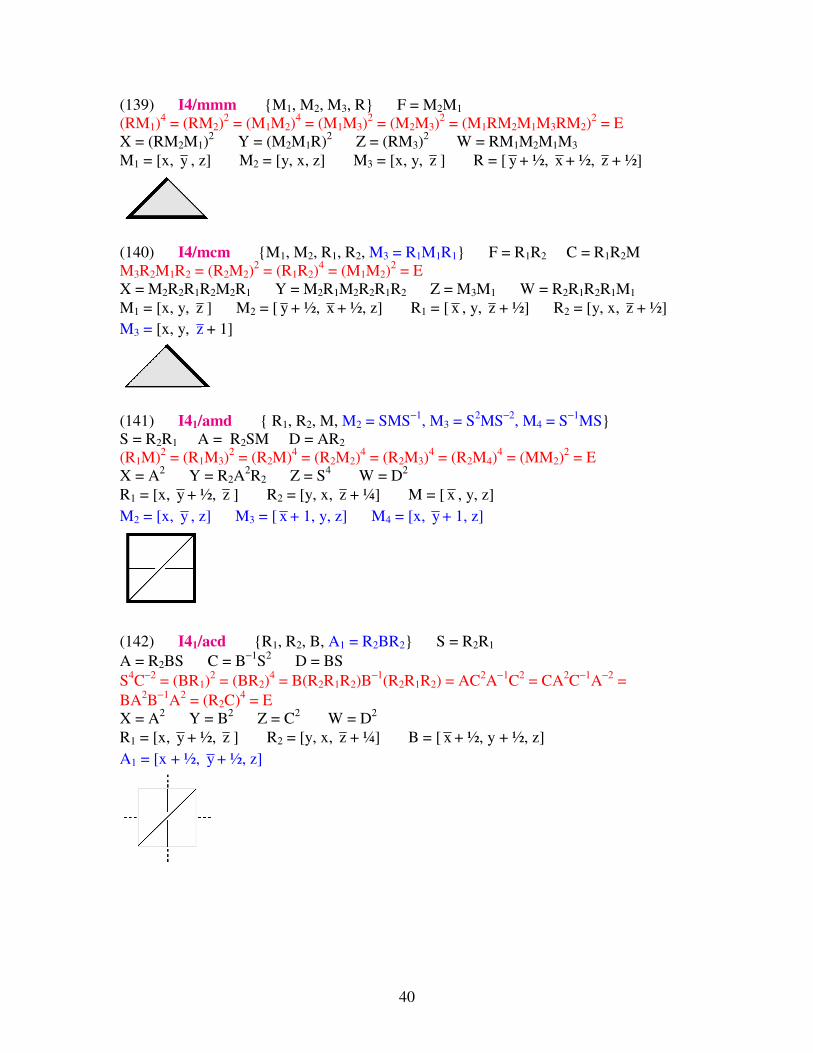
(139) I4/mmm {M1, M2, M3, R} F = M2M1
(RM1)4 = (RM2)
2 = (M1M2)
4 = (M1M3)
2 = (M2M3)
2 = (M1RM2M1M3RM2)
2 = E
X = (RM2M1)2 Y = (M2M1R)
2 Z = (RM3)
2 W = RM1M2M1M3
M1 = [x, y , z] M2 = [y, x, z] M3 = [x, y, z ] R = [ y + ½, x + ½, z + ½]
(140) I4/mcm {M1, M2, R1, R2, M3 = R1M1R1} F = R1R2 C = R1R2M
M3R2M1R2 = (R2M2)2 = (R1R2)
4 = (M1M2)
2 = E
X = M2R2R1R2M2R1 Y = M2R1M2R2R1R2 Z = M3M1 W = R2R1R2R1M1
M1 = [x, y, z ] M2 = [ y + ½, x + ½, z] R1 = [ x , y, z + ½] R2 = [y, x, z + ½]
M3 = [x, y, z + 1]
(141) I41/amd { R1, R2, M, M2 = SMS−1
, M3 = S2MS
−2, M4 = S
−1MS}
S = R2R1 A = R2SM D = AR2
(R1M)2 = (R1M3)
2 = (R2M)
4 = (R2M2)
4 = (R2M3)
4 = (R2M4)
4 = (MM2)
2 = E
X = A2 Y = R2A
2R2 Z = S
4 W = D
2
R1 = [x, y + ½, z ] R2 = [y, x, z + ¼] M = [ x , y, z]
M2 = [x, y , z] M3 = [ x + 1, y, z] M4 = [x, y + 1, z]
(142) I41/acd {R1, R2, B, A1 = R2BR2} S = R2R1
A = R2BS C = B−1
S2 D = BS
S4C
−2 = (BR1)
2 = (BR2)
4 = B(R2R1R2)B
−1(R2R1R2) = AC
2A
−1C
2 = CA
2C
−1A
−2 =
BA2B
−1A
2 = (R2C)
4 = E
X = A2 Y = B
2 Z = C
2 W = D
2
R1 = [x, y + ½, z ] R2 = [y, x, z + ¼] B = [ x + ½, y + ½, z]
A1 = [x + ½, y + ½, z]

41
Trigonal
(143) P3 {Z, Q1, Q2}
(Q1Q2)3 = ZQ1Z
−1Q1
−1 = ZQ2Z
−1Q2
−1 = E
X = Q1−1
Q2 Y = Q2Q1−1
Q1 = [−y + 1, x − y, z] Q2 = [−y + 1, x − y + 1, z]
(144) P31 {X, S, Y = SXS−1
, XY }
XYX−1
Y−1
= S3XS
−3X
−1 = E
Z = S3
S = [−y, x − y, z + 1/3]
(145) P32 {X, S, Y = S−1
XS XY }
XYX−1
Y−1
= S3XS
−3X
−1 = E
Z = S3
S = [y − x, −x, z + 1/3]
(146) R3 {S, Q, Q2 = SQS−1
, Q3 = S−1
QS}
QS3Q
−1S
−3 = Q2QQ2
−1Q
−1 = (QQ2)
3 = (QS)
2QS
−2 = E
X = Q2Q−1
Y = QQ2Q Z = S3 T = SQ
−1
S = [2/3 − y, 1/3 + x − y, 1/3 + z] Q2 = [−y + 1, x − y, z] Q3 = [−y + 1, x − y + 1, z]
42
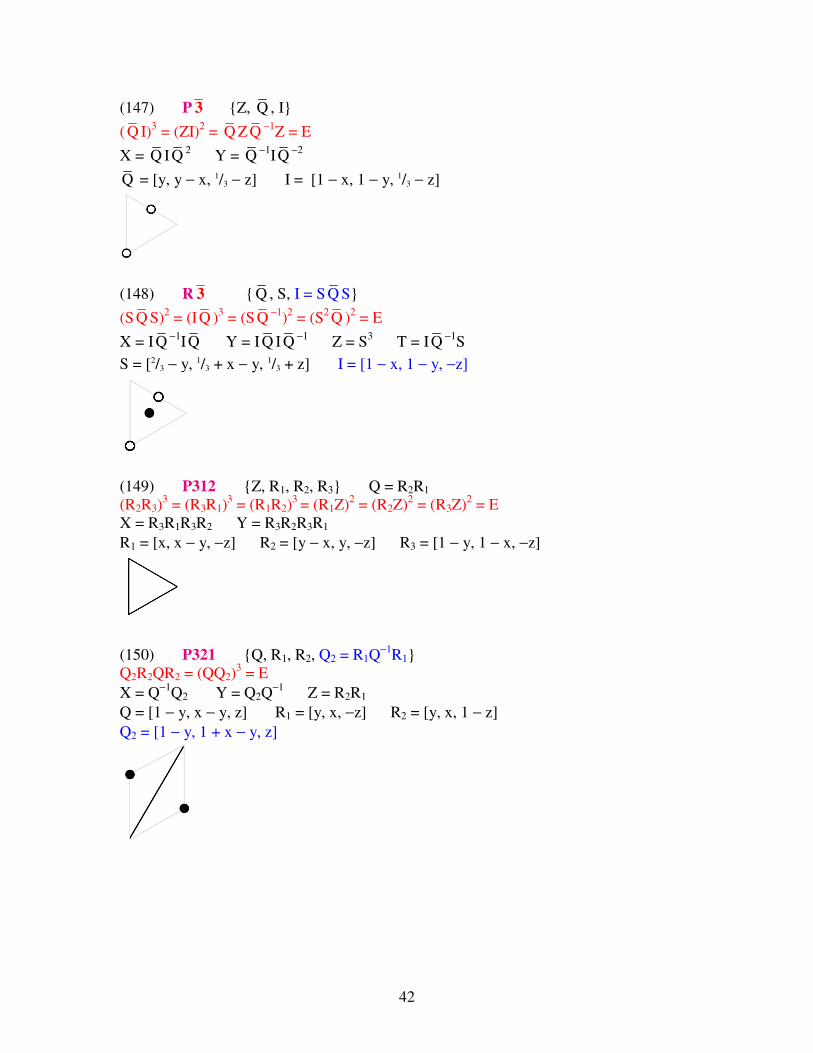
(147) P 3 {Z, Q , I}
( Q I)3 = (ZI)
2 = Q Z Q
−1Z = E
X = Q I Q2 Y = Q
−1IQ
−2
Q = [y, y − x, 1/3 − z] I = [1 − x, 1 − y, 1/3 − z]
(148) R 3 { Q , S, I = S Q S}
(S Q S)2 = (IQ )
3 = (S Q
−1)2 = (S
2Q )
2 = E
X = I Q−1
IQ Y = I Q I Q−1
Z = S3 T = IQ
−1S
S = [2/3 − y, 1/3 + x − y, 1/3 + z] I = [1 − x, 1 − y, −z]
(149) P312 {Z, R1, R2, R3} Q = R2R1
(R2R3)3 = (R3R1)
3 = (R1R2)
3 = (R1Z)
2 = (R2Z)
2 = (R3Z)
2 = E
X = R3R1R3R2 Y = R3R2R3R1
R1 = [x, x − y, −z] R2 = [y − x, y, −z] R3 = [1 − y, 1 − x, −z]
(150) P321 {Q, R1, R2, Q2 = R1Q−1
R1}
Q2R2QR2 = (QQ2)3 = E
X = Q−1
Q2 Y = Q2Q−1
Z = R2R1
Q = [1 − y, x − y, z] R1 = [y, x, −z] R2 = [y, x, 1 − z]
Q2 = [1 − y, 1 + x − y, z]

43
(151) P3112 {X, R1, R2, Y = R2R1XR1R2, XY}
(R2X)2 = (X
−1R1)
2(XR1)
2 = (XR1R2R1R2R1)
2 = E
Y = R2R1XR1R2 Z = (R2R1)3
R1 = [x, x − y, −z] R2 = [−x + y, y, 1/3 − z]
(152) P3121 {X, R1, R2, Y = R1XR1, XY}
(R1X)2(R1X
−1)2 = X(R1R2)
2X
−1(R1R2)
2 = E
Y = R1XR1 Z = (R2R1)3
R1 = [y, x, −z] R2 = [−x, −x + y, 1/3 − z]
(153) P3212 {X, R1, R2, Y = R1R2XR2R1, XY }
(R1X)2 = (R2X)
2(R2X
−1)2 = (XR2R1R2R1R2)
2 = E
Y = R1R2XR2R1 Z = (R2R1)3
R1 = [−x + y, y, −z] R2 = [x, x − y, 1/3 − z]
(154) P3221 {X, R1, R2, Y = R2XR2, XY }
(R2X)2(R2X
−1)2 = X(R2R1)
2X
−1 (R2R1)
2 = E
Y = R2XR2 Z = (R2R1)3
R1 = [−x, −x + y, −z] R2 = [y, x, 1/3 − z]

44
(155) R32 {Q R1, R2, Q2 = R2Q−1
R2, Q3 = R1Q2−1
R1 }
QR1Q−1
R1 = (QQ2)3 = (QQ2Q)R1R2R1R2R1(QQ2Q)
−1R1R2R1R2R1 = E
X = Q2Q−1
Y = QQ2Q Z = (R2R1)3
R1 = [y, x, −z] R2 = [2/3 − x, 1/3 − x + y, 1/3 − z]
Q2 = [1 − y, x − y, z] Q3 = [1 − y, 1 + x − y, z]
(156) P3m1 {Z, M1, M2, M3} Q = M2M1
(M2M3)3 = (M3M1)
2 = (M1M2)
2 = MiZMiZ
−1 = E
X = M1M3M1M2 Y = M2M3M2M1
M1 = [x, x − y, z] M2 = [−x + y, y, z] M3 = [1 − y, 1 − x, z]
(157) P31m {Z, M, Q}
(QMQ−1
M)3 = QZQ
−1Z
−1 = MZMZ
−1 = E
X = QMQ−1
MQ Y = (Q−1
M)2
M = [x − y, −y, z] Q = [1 − y, x − y, z]
(158) P3c1 {C, Q1, Q2} B = (Q1Q2)−1
(Q1Q2)3 = Q1CQ1C
−1 = Q2CQ2C
−1 = E
X = Q1Q2−1
Y = Q2Q1−1
Z = C2
C = [1 − y, 1 − x, ½ + z] Q1 = [1 − y, x − y, z] Q2 = [1 − y, 1 + x − y, z]

45
(159) P31c {C, Q, Q2 = CQ−1
C−1
}
(QQ2)3 = C
2QC
−2Q
−1 = E
X = Q−1
Q2 Y = Q2Q−1
Z = C2
C = [y, x, ½ + z] Q = [1 − y, x − y, z] Q2 = [1 − y, 1 + x − y, z]
(160) R3m {M, S, M2 = SMS−1
, M3 = S−1
MS} Q = S2MS
−2M
MS3MS
−3 = (M2M)
3 = E
X = MSMS−1
MS−1
MS Y = SXS−1
Z = S3 T = SMS
−1MS
M = [x, x − y, z] S = [2/3 − y, 1/3 + x − y, 1/3 + z]
M2 = [−y, −x, z] M3 = [−x + y, y, z]
(161) R3c {S, C, S2 = CSC−1
, Q = S−1
S2, Q2 = S2S−1
}
(Q1Q2)3 = S
3C
−2 = E
X = Q−1
Q2 Y = Q2Q−1
Z = C2 T = S2
2S
−1
S = [2/3 − y, 1/3 + x − y,
½ + z] C = [x, x − y, ½ + z]
S2 = [2/3 − x + y, 1/3 − x, ½ + z] Q = [1 − y, x − y, z] Q2 = [1 − y, 1 + x − y, z]
(162) P 3 1m {Z, M, R1, R2} Q = MR2
(R1R2)3 = (MR1)
2 = (MR2)
6 = (ZR1)
2 = (ZR2)
2 = MZMZ
−1 = E
X = R1R2(MR2)2 Y = R2MR2R1R2M
M = [x − y, −y, z] R1 = [1 − x + y, y, −z] R2 = [x, x − y, −z]

46
(163) P 3 1c {C, R1, R2, R3 = CR1C} Q = C−1
R1
R3C−1
R2C = (R2R3)3 = (R3R1)
3 = (R1R2)
3 = (CR2)
2 = (R1C)
6 = E
X = R2R3R2R1 Y = R2R1R2R3 Z = C2
C = [y, x, ½ + z] R1 = [−x + y, y, ½ − z] R2 = [−y, −x, ½ − z]
R3 = [x, x − y, ½ − z]
(164) P 3 m1 { M1, M2, R1, R2, M3 = R1M1R1} Q = M1R
M3R2M1R2 = (M2M3)3 = (M3M1)
3 = (M1M2)
3 = (M1R1)
6 = (M2R1)
2 = (M2R2)
2 = E
X = M1M2M1M3 Y = M2M3M2M1 Z = R2R1
M1 = [x, x − y, z] M2 = [1 − y, 1 − x, z] R = [y, x, −z] R2 = [y, x, 1 − z]
M3 = [−x + y, y, z]
(165) P 3 c1 {R, C, Q} Q = RQ−1
CQ
(QRQ−1
R)3 = (RQ
−1CQ)
2Q = RCRC
−1 = CQC
−1RQR = C
2QRQC
−2(QRQ)
−1 = E
X = (Q−1
R)2 Y = (RQ
−1)2 Z = C
2
R = [y, x, ½ − z] C = [1 − y, 1 − x , ½ + z] Q = [1 − y, x − y, z]
(166) R 3 m {M, R1, R2, M2 = R1MR1, M3 = R2MR2} Q = MR1
(MR2R1R2)2 = (MR1R2R1)
2 = (MR2)
6 = (MR1)
6 = E
X = MM3MM2 Y = M3M2M3M Z = (R2R1)3 T = R2MR1M
M = [x, x − y, z] R1 = [y, x, −z] R2 = [1/3 + x − y, 2/3 − y, 1/3 − z]
M2 = [−x + y, y, z] M3 = [1 − y, 1 − x, z]
47
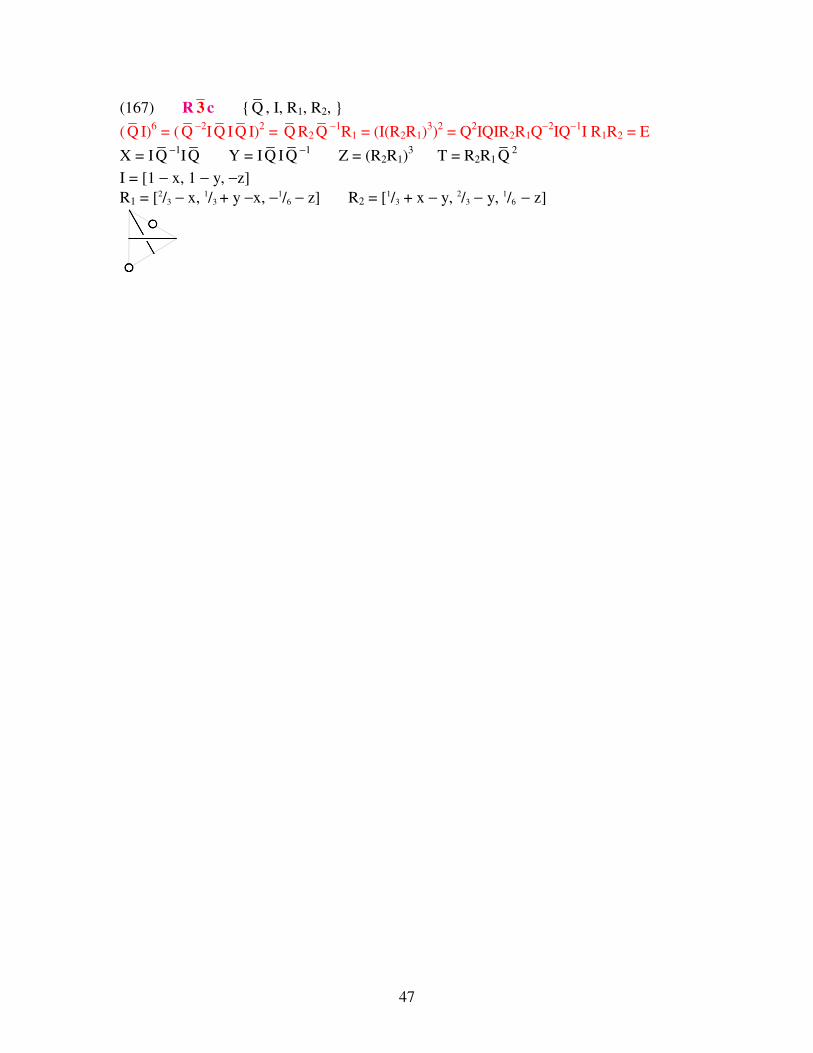
(167) R 3 c { Q , I, R1, R2, }
( Q I)6 = ( Q
−2IQ I Q I)
2 = Q R2 Q
−1R1 = (I(R2R1)
3)2 = Q
2IQIR2R1Q
−2IQ
−1I R1R2 = E
X = I Q−1
IQ Y = I Q I Q
−1 Z = (R2R1)
3 T = R2R1 Q
2
I = [1 − x, 1 − y, −z]
R1 = [2/3 − x, 1/3 + y −x, −1/6 − z] R2 = [1/3 + x − y, 2/3 − y, 1/6 − z]
48
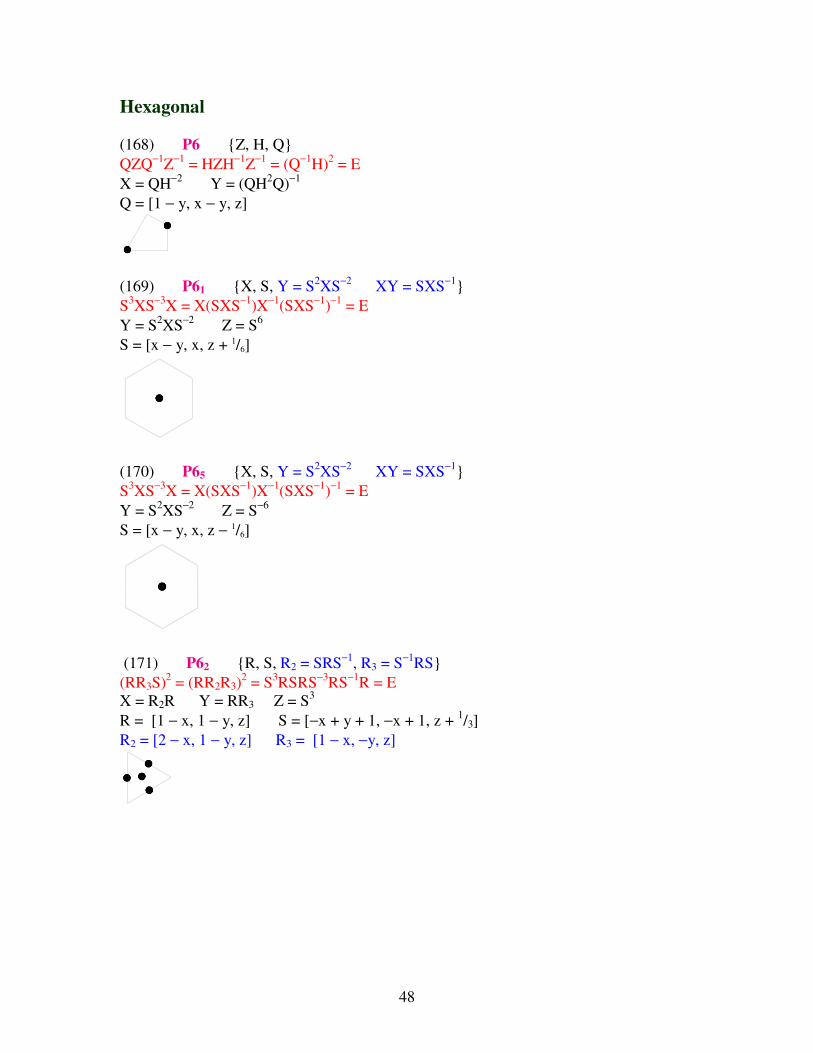
Hexagonal
(168) P6 {Z, H, Q}
QZQ−1
Z−1
= HZH−1
Z−1
= (Q−1
H)2 = E
X = QH−2
Y = (QH2Q)
−1
Q = [1 − y, x − y, z]
(169) P61 {X, S, Y = S2XS
−2 XY = SXS
−1}
S3XS
−3X = X(SXS
−1)X
−1(SXS
−1)−1
= E
Y = S2XS
−2 Z = S
6
S = [x − y, x, z + 1/6]
(170) P65 {X, S, Y = S2XS
−2 XY = SXS
−1}
S3XS
−3X = X(SXS
−1)X
−1(SXS
−1)−1
= E
Y = S2XS
−2 Z = S
−6
S = [x − y, x, z − 1/6]
(171) P62 {R, S, R2 = SRS−1
, R3 = S−1
RS}
(RR3S)2 = (RR2R3)
2 = S
3RSRS
−3RS
−1R = E
X = R2R Y = RR3 Z = S3
R = [1 − x, 1 − y, z] S = [−x + y + 1, −x + 1, z + 1/3]
R2 = [2 − x, 1 − y, z] R3 = [1 − x, −y, z]

49
(172) P64 {R, S, R2 = SRS−1
, R3 = S−1
RS }
(RR3S)2 = (RR2R3)
2 = S
3RSRS
−3RS
−1R = E
X = R3R Y = RR2 Z = S3
R = [1 − x, 1 − y, z] S = [−y + 1, x − y, z + 1/3]
R2 = [1 − x, −y, z] R3 = [2 − x, 1 − y, z]
(173) P63 {Q, S, Q2 = SQS−1
}
(QQ2)3 = S
2QS
−2Q
−1 = E
X = Q−1
Q2 Y = Q2Q−1
Z = S2
Q = [1 − y, x − y, z] S = [1 − x, 1 − y, ½ + z] Q2 = [1 − y, 1 + x − y, z]
(174) P 6 {Z, H 1, H 2}
( H 1 H 2)3 = ( H 1
4H 2)
6 = ( H 2
4H 1)
6 = H 1
3H 2
−3 = H 1Z H 1
−1Z = H 2Z H 2
−1Z
= H 12( H 1 H 2)
−1H 2( H 2 H 1)
−1 = E
X = H 1 H 2−1
Y = H 2−1
H 1
H 1 = [1 + y − x, 1 − x, −z] H2 = [y − x, 1 − x, −z]
(175) P6/m {Z, H , R}
(R H )6 = (R H
2)6 = (R H
3)2 = ( H
4R H R)
6 = H Z H
−1Z = H
3R H
−3R = = ZRZ
−1R =
( H2R( H
−1R)
2) 2 = E
X = H R H−1
R Y = R H−1
R H
H = [1 + y − x, 1 − x, −z] R = [1 − x, 1 − y, z]
50
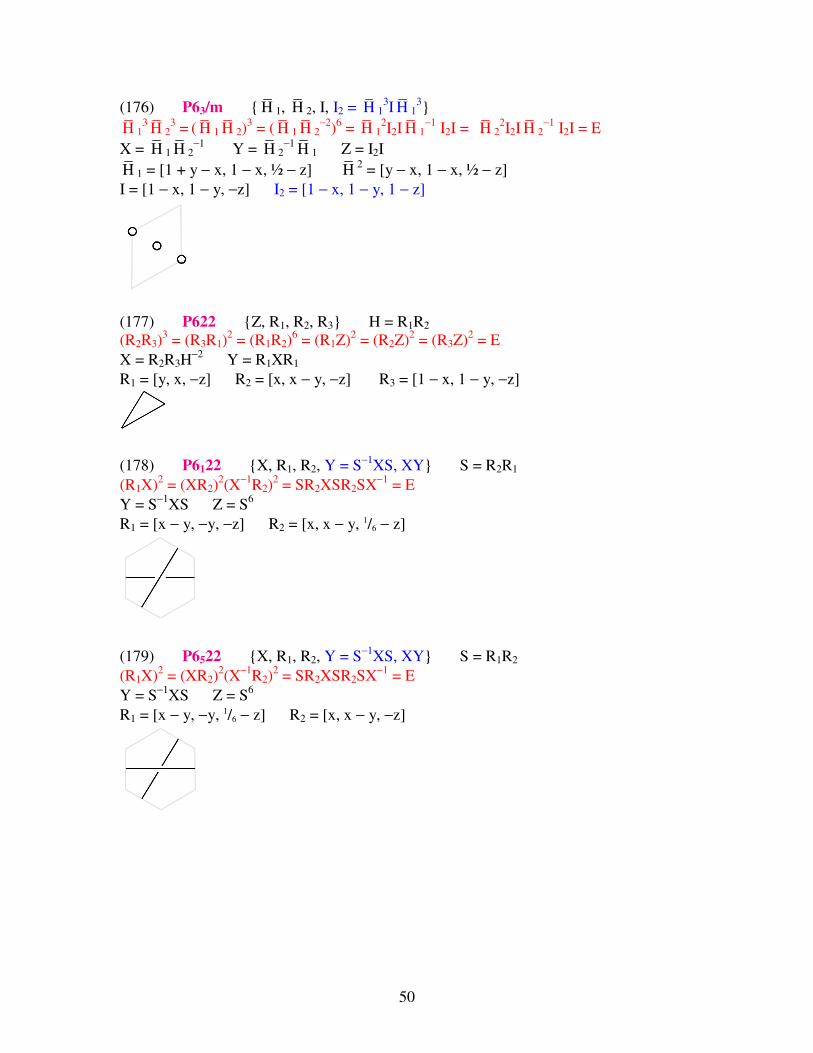
(176) P63/m { H 1, H 2, I, I2 = H 13I H 1
3}
H 13H 2
3 = ( H 1 H 2)
3 = ( H 1 H 2
−2)6 = H 1
2I2I H 1
−1 I2I = H 2
2I2I H 2
−1 I2I = E
X = H 1 H 2−1
Y = H 2−1
H 1 Z = I2I
H 1 = [1 + y − x, 1 − x, ½ − z] H2 = [y − x, 1 − x, ½ − z]
I = [1 − x, 1 − y, −z] I2 = [1 − x, 1 − y, 1 − z]
(177) P622 {Z, R1, R2, R3} H = R1R2
(R2R3)3 = (R3R1)
2 = (R1R2)
6 = (R1Z)
2 = (R2Z)
2 = (R3Z)
2 = E
X = R2R3H−2
Y = R1XR1
R1 = [y, x, −z] R2 = [x, x − y, −z] R3 = [1 − x, 1 − y, −z]
(178) P6122 {X, R1, R2, Y = S−1
XS, XY} S = R2R1
(R1X)2 = (XR2)
2(X
−1R2)
2 = SR2XSR2SX
−1 = E
Y = S−1
XS Z = S6
R1 = [x − y, −y, −z] R2 = [x, x − y, 1/6 − z]
(179) P6522 {X, R1, R2, Y = S−1
XS, XY} S = R1R2
(R1X)2 = (XR2)
2(X
−1R2)
2 = SR2XSR2SX
−1 = E
Y = S−1
XS Z = S6
R1 = [x − y, −y, 1/6 − z] R2 = [x, x − y, −z]
51
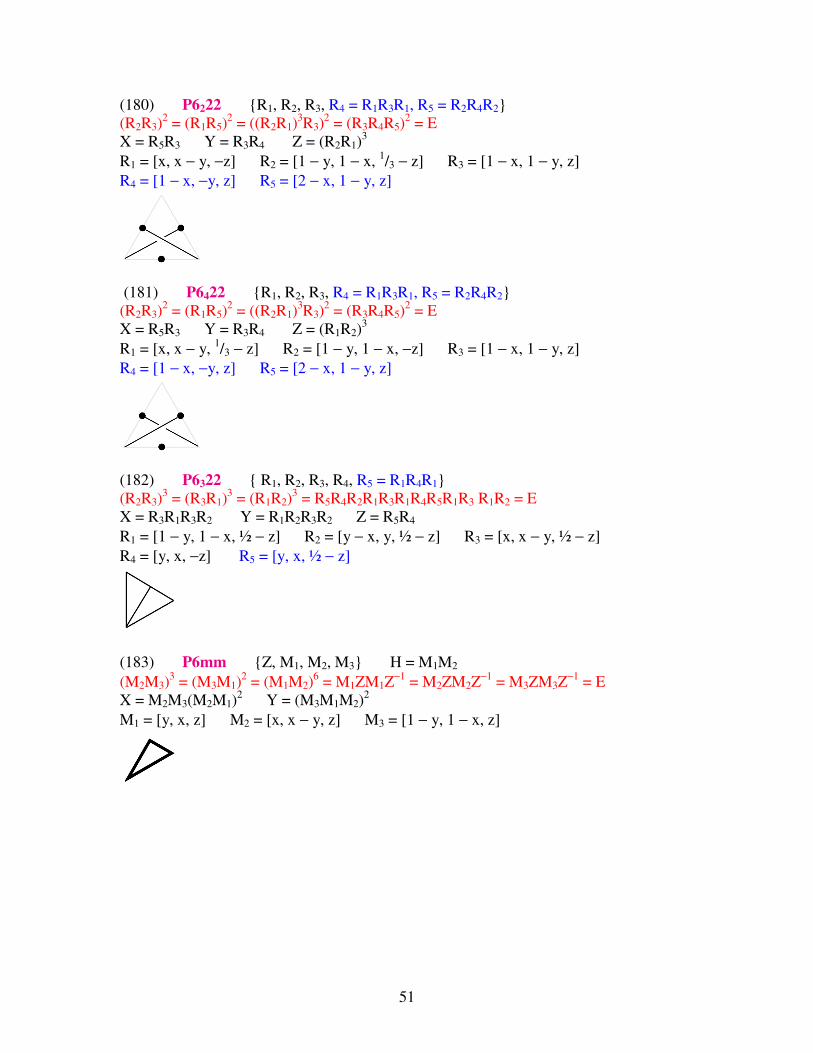
(180) P6222 {R1, R2, R3, R4 = R1R3R1, R5 = R2R4R2}
(R2R3)2 = (R1R5)
2 = ((R2R1)
3R3)
2 = (R3R4R5)
2 = E
X = R5R3 Y = R3R4 Z = (R2R1)3
R1 = [x, x − y, −z] R2 = [1 − y, 1 − x, 1/3 − z] R3 = [1 − x, 1 − y, z]
R4 = [1 − x, −y, z] R5 = [2 − x, 1 − y, z]
(181) P6422 {R1, R2, R3, R4 = R1R3R1, R5 = R2R4R2}
(R2R3)2 = (R1R5)
2 = ((R2R1)
3R3)
2 = (R3R4R5)
2 = E
X = R5R3 Y = R3R4 Z = (R1R2)3
R1 = [x, x − y, 1/3 − z] R2 = [1 − y, 1 − x, −z] R3 = [1 − x, 1 − y, z]
R4 = [1 − x, −y, z] R5 = [2 − x, 1 − y, z]
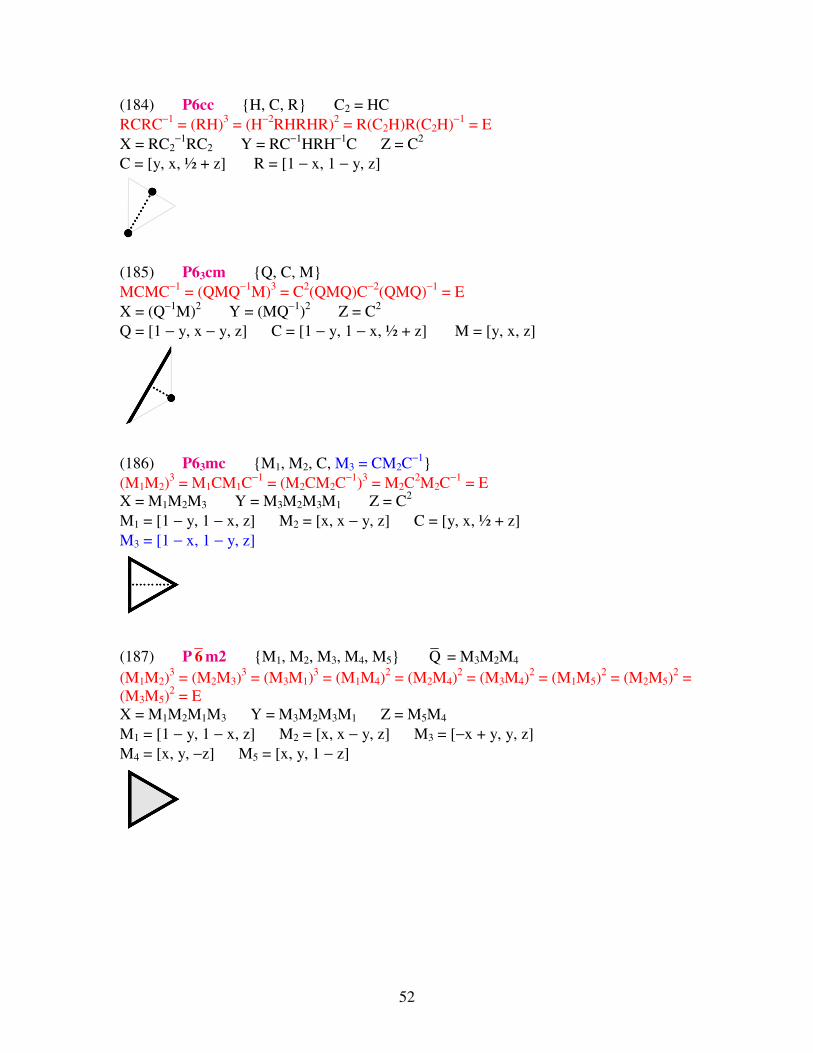
(182) P6322 { R1, R2, R3, R4, R5 = R1R4R1}
(R2R3)3 = (R3R1)
3 = (R1R2)
3 = R5R4R2R1R3R1R4R5R1R3 R1R2 = E
X = R3R1R3R2 Y = R1R2R3R2 Z = R5R4
R1 = [1 − y, 1 − x, ½ − z] R2 = [y − x, y, ½ − z] R3 = [x, x − y, ½ − z]
R4 = [y, x, −z] R5 = [y, x, ½ − z]
(183) P6mm {Z, M1, M2, M3} H = M1M2
(M2M3)3 = (M3M1)
2 = (M1M2)
6 = M1ZM1Z
−1 = M2ZM2Z
−1 = M3ZM3Z
−1 = E
X = M2M3(M2M1)2 Y = (M3M1M2)
2
M1 = [y, x, z] M2 = [x, x − y, z] M3 = [1 − y, 1 − x, z]
52
(184) P6cc {H, C, R} C2 = HC
RCRC−1
= (RH)3 = (H
−2RHRHR)
2 = R(C2H)R(C2H)
−1 = E
X = RC2−1
RC2 Y = RC−1
HRH−1
C Z = C2
C = [y, x, ½ + z] R = [1 − x, 1 − y, z]
(185) P63cm {Q, C, M}
MCMC−1
= (QMQ−1
M)3 = C
2(QMQ)C
−2(QMQ)
−1 = E
X = (Q−1
M)2 Y = (MQ
−1)2 Z = C
2
Q = [1 − y, x − y, z] C = [1 − y, 1 − x, ½ + z] M = [y, x, z]
(186) P63mc {M1, M2, C, M3 = CM2C−1
}
(M1M2)3 = M1CM1C
−1 = (M2CM2C
−1)3 = M2C
2M2C
−1 = E
X = M1M2M3 Y = M3M2M3M1 Z = C2
M1 = [1 − y, 1 − x, z] M2 = [x, x − y, z] C = [y, x, ½ + z]
M3 = [1 − x, 1 − y, z]
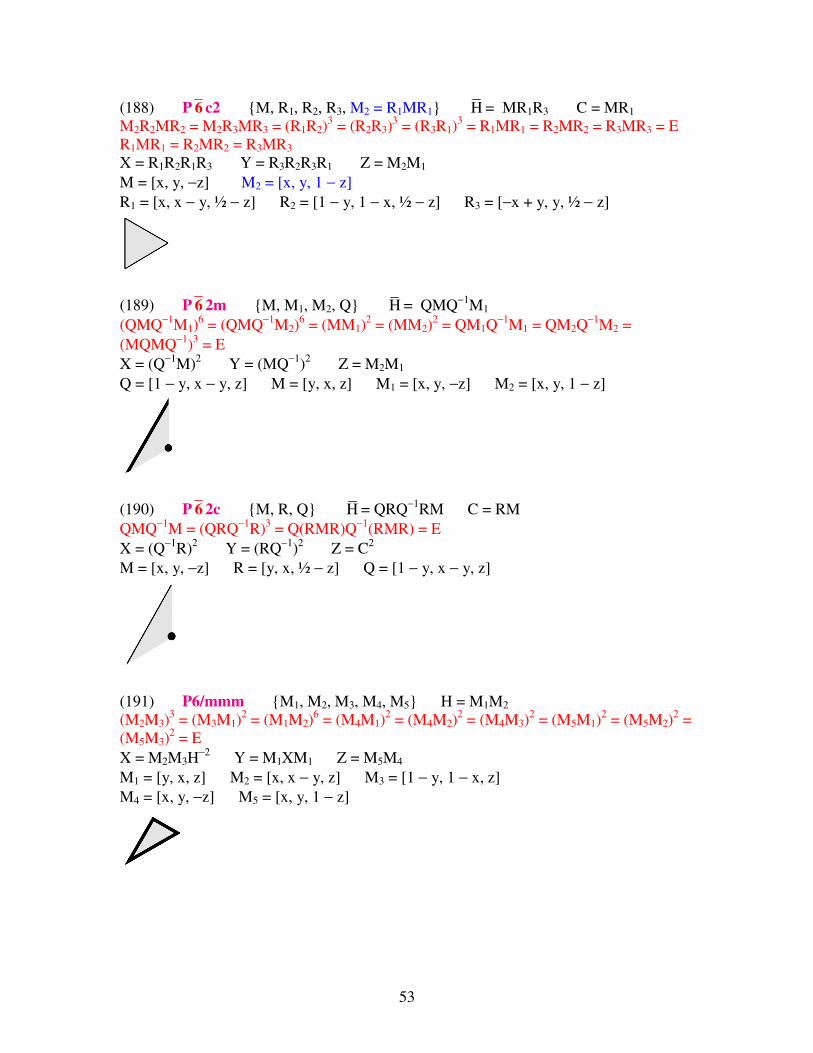
(187) P 6 m2 {M1, M2, M3, M4, M5} Q = M3M2M4
(M1M2)3 = (M2M3)
3 = (M3M1)
3 = (M1M4)
2 = (M2M4)
2 = (M3M4)
2 = (M1M5)
2 = (M2M5)
2 =
(M3M5)2 = E
X = M1M2M1M3 Y = M3M2M3M1 Z = M5M4
M1 = [1 − y, 1 − x, z] M2 = [x, x − y, z] M3 = [−x + y, y, z]
M4 = [x, y, −z] M5 = [x, y, 1 − z]
53
(188) P 6 c2 {M, R1, R2, R3, M2 = R1MR1} H = MR1R3 C = MR1
M2R2MR2 = M2R3MR3 = (R1R2)3 = (R2R3)
3 = (R3R1)
3 = R1MR1 = R2MR2 = R3MR3 = E
R1MR1 = R2MR2 = R3MR3
X = R1R2R1R3 Y = R3R2R3R1 Z = M2M1
M = [x, y, −z] M2 = [x, y, 1 − z]
R1 = [x, x − y, ½ − z] R2 = [1 − y, 1 − x, ½ − z] R3 = [−x + y, y, ½ − z]
(189) P 6 2m {M, M1, M2, Q} H = QMQ−1
M1
(QMQ−1
M1)6 = (QMQ
−1M2)
6 = (MM1)
2 = (MM2)
2 = QM1Q
−1M1 = QM2Q
−1M2 =
(MQMQ−1
)3 = E
X = (Q−1
M)2 Y = (MQ
−1)2 Z = M2M1
Q = [1 − y, x − y, z] M = [y, x, z] M1 = [x, y, −z] M2 = [x, y, 1 − z]
(190) P 6 2c {M, R, Q} H = QRQ−1
RM C = RM
QMQ−1
M = (QRQ−1
R)3 = Q(RMR)Q
−1(RMR) = E
X = (Q−1
R)2 Y = (RQ
−1)2 Z = C
2
M = [x, y, −z] R = [y, x, ½ − z] Q = [1 − y, x − y, z]
(191) P6/mmm {M1, M2, M3, M4, M5} H = M1M2
(M2M3)3 = (M3M1)
2 = (M1M2)
6 = (M4M1)
2 = (M4M2)
2 = (M4M3)
2 = (M5M1)
2 = (M5M2)
2 =
(M5M3)2 = E
X = M2M3H−2
Y = M1XM1 Z = M5M4
M1 = [y, x, z] M2 = [x, x − y, z] M3 = [1 − y, 1 − x, z]
M4 = [x, y, −z] M5 = [x, y, 1 − z]

54
(192) P6/mcc {M, R1, R2, R3, M2 = R1MR1}
H = R1R2 C1 = M1R2R1R2 C2 = M1R1
(R2R3)3 = (R3R1)
2 = (R1R2)
6 = MR2R3MR3R2 = MR3R1MR1R3 = MR1R2MR2R1 = E
X = R2R3 H−2
Y = R1XR1 Z = M2M
M = [x, y, −z] M2 = [x, y, 1 − z]
R1 = [y, x, ½ − z] R2 = [x, x − y, ½ − z] R3 = [1 − x, 1 − y, ½ − z]
(193) P63/mcm {M1, M2, R1, R2, M3 = R1M2R1} C = R1M2
M3R2M1R2 = (R1R2)3 = (M1R1)
6 = (M1R2)
2 = (M1M2)
2 = (M1M3)
2 = M1C
2M1C
−2 =
(R2C2)2 = E
X = (R2R1M1)2 Y = (M1R2R1)
2 Z = C
2
M1 = [y, x, z] M2 = [x, y, −z] M2 = [x, y, 1 − z]
R1 = [x, x − y, ½ − z] R2 = [1 − y, 1 − x, ½ − z]
(194) P63/mmc {M1, M2, M3, R, M4 = RM3R} C = RM3
(M1M2)3 = (M1R)
6 = (M2R)
2 = (M3M1)
2 = (M3M2)
2 = E
X = (M2M1R)2 Y = (RM2M1)
2 Z = C
2
M1 = [x, x − y, z] M2 = [1 − y, 1 − x, z] M3 = [x, y, −z]
R = [y, x, ½ − z] M4 = [x, y, 1 − z]

55
PART II. CUBIC GROUPS
As in part I, our tabulation gives:
(i) the number assigned to the group in the International Tables for Crystallography; its
Hermann-Mauguin symbol; {a list of the chosen generators − a minimal set
followed by additional (redundant) generators that extend the minimal set to a set
that relates an asymmetric unit to all contiguous unit}; generators indicated in the
H-M symbol, expressed in terms of the chosen set;
(ii) a set of generating relations that are sufficient to define the abstract group;
(iii) translations expressed in terms of the chosen generators;
(iv) a particular realization of the generators in terms of Euclidean transformations;
specified in terms of the image of a general point [x, y, z].
(v) a diagram of the asymmetric unit.
Explanation of the Figures
Each figure illustrates an asymmetric unit. The cube outlined in grey is an eighth of a unit
cell, with the axes like this:
Twofold axes are indicated in red, threefold axes in green and fourfold axes in blue.
Centres of 3 and 4 transformations are indicated by and , respectively. Mirror faces
of the units are unmarked.

56
(195) P23 {Q, R1, R2, R3 = R1R2}
K1 = QR1 L1 = Q−1
R1 K2 = QR2 L2 = Q−1
R2
(R1R2)2 = (QR3)
3 = (L1K2)
2 = (K1K2)
3 = (L1L2)
3 = (K1L2
−1)3 = K1
3L2
−3 = QR3K2
2L1K1 =
K12L1
2K1L1
2K1
2L1 = K2
2L2
2K2L2
2K2
2L2 = E
Z = QR3L1
R1 = [x, 1 − y, −z] R2 = [1 − x, y, −z] R3 = [1 − x, 1 − y, z]
(196) F23 {Q, Q2, R}
(Q−1
Q2)2 = (QQ2)
3 = (QR)
3 = (Q2R)
3 = E
Z = (Q2RQ−1
)2 W = RQQ2Q
Q2 = [−z, x, −y] R = [½ − x, ½ − y, z]
(197) I23 {S1, S2, R = S1S2} Q = S2−1
S1
K = QR = S2−1
S12S2 L = Q
−1R = S1
−1S2
2S1
(S1S2)2 = (S2
−1S1)
3 = (S1
2S2
2)2 = (S1
2S2
−2)3 = S1
3S2
3S1
−3S2
−3 =
K2L
2KL
2K
2L = E
Z = (S1−1
S22)2 W = S1
3Z
S1 = [½ + y, ½ − z, ½ − x] S2 = [½ + z, ½ − x, ½ − y] R = [1 − x, y, −z]
Axes of S1 = 32(λ,λ − 1/3, 2/3 − λ)[1/6,
1/6, −1/6] and
S2 = 32(λ, 2/3 − λ, λ − 1/3)[1/6, −
1/6, 1/6] marked in turquoise.

57
(198) P213 {Q, S1, S2, Q2 = S1Q, Q3 = S2Q, Q4 = QS1}
S1S22 S1
−1S2
2 = S2S1
2 S2
−1S1
2 = QS2
2Q
−1S1
−2 = E
Z = S2
2
S1 = [½ + x, ½ − y, −z] S2 = [½ − x, 1 − y, ½ + z]
Q2 = [½ + z, ½ − x, −y] Q3 = [½ − z, 1 − x, −½ + y] Q4 = [−z, ½ + x, ½ − y]
(199) I213 {Q, R1, R2, S, R3 = QR2Q−1
} S2 = R3R1
K1 = QR1 L1 = Q−1
R1 K2 = QR2 L2 = Q−1
R2
L1K12K2L2
2 = K2
3S
−3 = K1L1R2R1 = (K2L1)
2S
−2 = K2
2L2L1 = (L1K2)
2(K2L2)
2 =
L1K1L12K2
2 = (K1K2
2)2 = S2
2R2S2
−2R2 = K1
2L1
2K1L1
2K1
2L1 = K2
2L2
2K2L2
2K2
2L2 = E
Z = S22 W = K1
−3S2
2
R1 = [½ − x, y, −z] R2 = [1 − x, ½ − y, z] S = [z, 1 − x, ½ − y]
R3 = [x, 1 − y, ½ − z]
(200) Pm 3 {Q, M1, M2, M3 = Q−1
M1Q} Q = (M2Q)3Q
(M1M2)2= (M2M3)
2 = (M1M2M3)
2 = (M1QM1Q
−1)2 = (M2QM2Q
−1)2 = (M2Q)
6 = E
Z = QM1Q−1
M2
M1 = [x, 1 − y, z] M2 = [x, y, −z] M3 = [1 − x, y, z]
The two shaded triangular facets are related through
S = 31(λ, 5/6 − λ, λ − 1/6)[ −1/6,
1/6, −1/6]
S1 and S2 are the the 2-fold screw transformations indicated in
red. The two blue shaded facets are related through the threefold
rotation Q3 = 3(λ, 1 − λ, ½ − λ). The two yellow shaded facets
are similarly related through Q4 = 3(λ, λ + ½, −λ). (Axes of Q3
and Q4 have been omitted in the figure.)
58
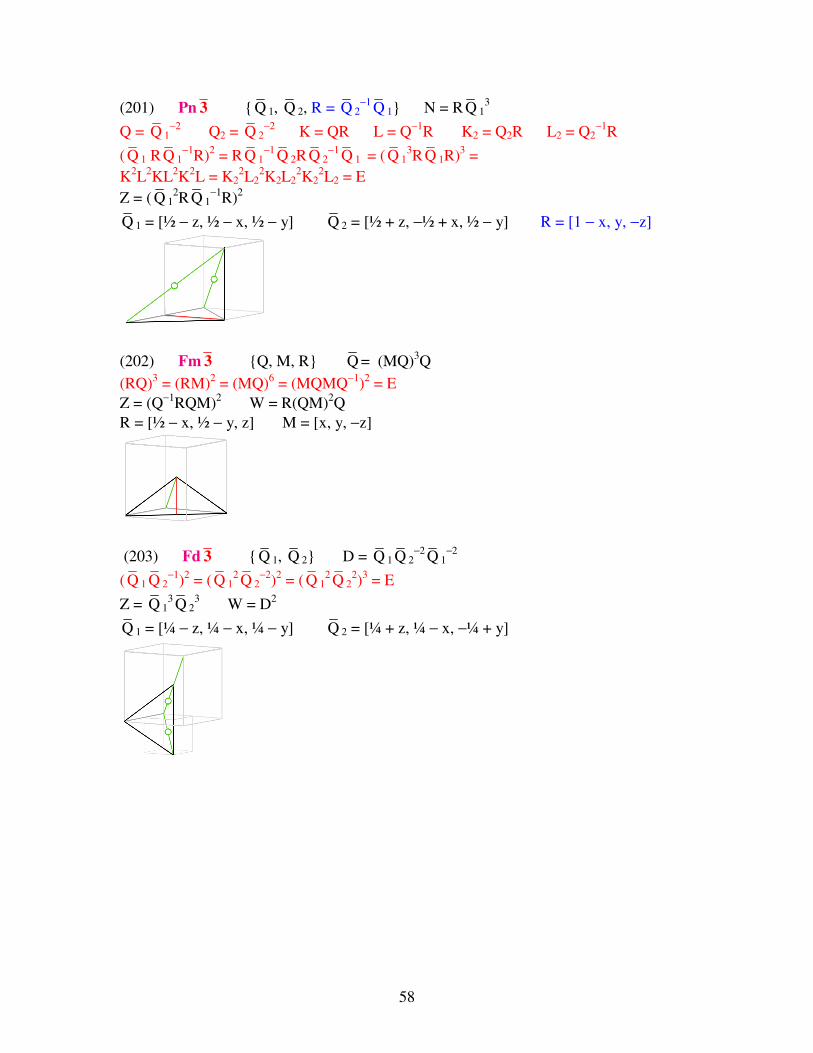
(201) Pn 3 { Q 1, Q 2, R = Q 2−1
Q 1} N = R Q 13
Q = Q 1−2
Q2 = Q 2−2
K = QR L = Q−1
R K2 = Q2R L2 = Q2−1
R
( Q 1 RQ 1−1
R)2 = RQ 1
−1Q 2RQ 2
−1Q 1
= ( Q 1
3RQ 1R)
3 =
K2L
2KL
2K
2L = K2
2L2
2K2L2
2K2
2L2 = E
Z = ( Q 12RQ 1
−1R)
2
Q 1 = [½ − z, ½ − x, ½ − y] Q 2 = [½ + z, −½ + x, ½ − y] R = [1 − x, y, −z]
(202) Fm 3 {Q, M, R} Q = (MQ)3Q
(RQ)3 = (RM)
2 = (MQ)
6 = (MQMQ
−1)2 = E
Z = (Q−1
RQM)2 W = R(QM)
2Q
R = [½ − x, ½ − y, z] M = [x, y, −z]
(203) Fd 3 { Q 1, Q 2} D = Q 1 Q 2−2
Q 1−2
( Q 1 Q 2−1
)2 = (Q 1
2Q 2
−2)2 = ( Q 1
2Q 2
2)3 = E
Z = Q 13Q 2
3 W = D
2
Q 1 = [¼ − z, ¼ − x, ¼ − y] Q 2 = [¼ + z, ¼ − x, −¼ + y]

59
(204) Im 3 { Q , M, M2 = Q M Q−1
}
I = Q3 Q = Q
4
(QM)6 = (MQMQ
−1)2 = (IMIQMQ
−1)2 = E
Z = (M Q3)2 W = QZQ
−1(MQ)
3
Q = [½ − z, ½ − x, ½ − y] M = [x, y, −z] M2 = [1 + x, y, −z]
(205) Pa 3 { Q 1, Q 2, Q = ( Q 1 Q 2)−1
}
A = ( Q 22Q 1)
−1 Q = Q 2
3 ( Q 1 Q 2
−1)2Q
Q 16 = Q 2
6 = (Q 1 Q 2)
3 = (Q 1
2Q 2)
2 = ( Q 1
2Q 2
−2)2 = ( Q 1 Q 2
−1)2Q 1
3Q 2
3 =
Q12(Q2
−1Q1Q2
−1)(Q1
−1Q2Q1
−1)Q2
2(Q1
−1Q2Q1
−1)(Q2
−1Q1Q2
−1) = E
Z = ( Q 2−1
Q 1)2
Q 1 = [½ + z, x, ½ − y] Q 2 = [z, ½ − x, −½ + y]
(206) Ia 3 { Q , R, I2 = ( Q2R)
2Q
−1R } A = Q
2RQ
Q = Q−2
I = Q3 K = Q R L = Q
−1R
K6 = L
6 = (KL)
2K
3L
3 = QI2Q
−1I2 = Q RILKL = Q(RI)
2Q
−1(RI2)
2 = K
2L
2KL
2K
2L = E
Z = (KL)−2
W = I2I
R = [x, ½ − y, −z] I2 = [½ − x, ½ − y, ½ − z]
The asymmetric unit has six facets, related in pairs through Q,
Q1 = 3 (½ − λ, ½ + λ, λ; ½, ½, 0) and Q2 = 3 (−λ, ½ − λ, λ; 0, ½, 0)
60
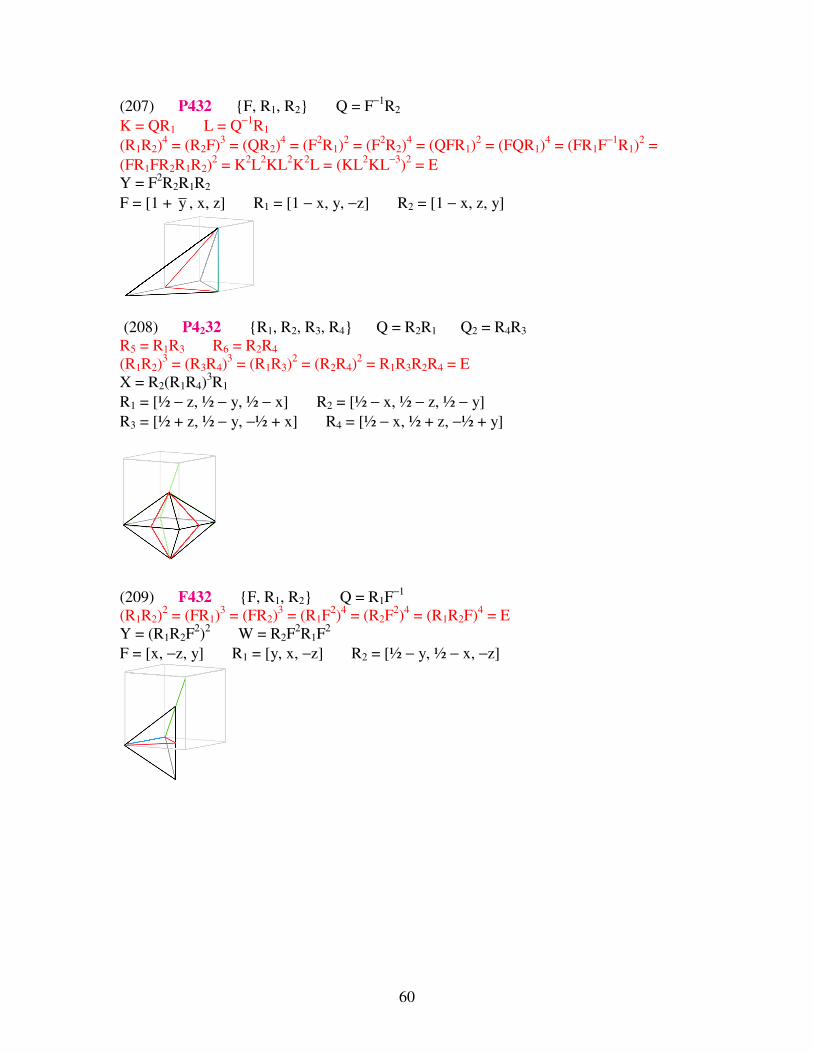
(207) P432 {F, R1, R2} Q = F−1
R2
K = QR1 L = Q−1
R1
(R1R2)4 = (R2F)
3 = (QR2)
4 = (F
2R1)
2 = (F
2R2)
4 = (QFR1)
2 = (FQR1)
4 = (FR1F
−1R1)
2 =
(FR1FR2R1R2)2 = K
2L
2KL
2K
2L = (KL
2KL
−3)2 = E
Y = F2R2R1R2
F = [1 + y , x, z] R1 = [1 − x, y, −z] R2 = [1 − x, z, y]
(208) P4232 {R1, R2, R3, R4} Q = R2R1 Q2 = R4R3
R5 = R1R3 R6 = R2R4
(R1R2)3 = (R3R4)
3 = (R1R3)
2 = (R2R4)
2 = R1R3R2R4 = E
X = R2(R1R4)3R1
R1 = [½ − z, ½ − y, ½ − x] R2 = [½ − x, ½ − z, ½ − y]
R3 = [½ + z, ½ − y, −½ + x] R4 = [½ − x, ½ + z, −½ + y]
(209) F432 {F, R1, R2} Q = R1F−1
(R1R2)2 = (FR1)
3 = (FR2)
3 = (R1F
2)4 = (R2F
2)4 = (R1R2F)
4 = E
Y = (R1R2F2)2 W = R2F
2R1F
2
F = [x, −z, y] R1 = [y, x, −z] R2 = [½ − y, ½ − x, −z]

61
(210) F4132 {Q, R1, R2, R3 = Q−1
R2} S = R3R1
(QR1)3 = (QR2)
2 = (QR2R1Q(R2R1)
3)2 = ((R2R1)
3Q)
2 = E
Z = S4 W = R2R1R2QR1Q
−1
R1 = [x, −y, −z] R2 = [¼ − z, ¼ − y, ¼ − x] R3 = [¼ − y, ¼ − x, ¼ − z]
(211) I432 {R1, R2, R3} Q = R2R1 F = QR3Q
(R2R1)3 = (QR3)
4 = (FR1F
−1R1)
2 = (Q(FR1)
2)2 = (R1FQF)
4 = E
Z = (R1R2R1R3)2 W = Q
−1R1R3F
2
R1 = [½ − z, ½ − y, ½ − x] R2 = [½ − x, ½ − z, ½ − y] R3 = [y, x, −z]
(212) P4332 {R1, R2, R3, S, Q2 = R3R1} Q = R2R1
G = QR3 J = Q−1
R3
(R1R2)3 = (R1R3)
3 = S
4Q2S
−2Q
−1 = S
4(Q2
−1Q)
2 = S
2G
−2 = S
4Q
−1 (R2R3)
2Q =
(QS4Q
−1)S
2(QS
4Q
−1)S
−2 = (Q
−1S
4Q)S
2(Q
−1S
4Q)S
−2 = (G
2J
3)2 = E
Z = S4
R1 = [¼ − z, ¼ − y, ¼ − x] R2 = [¼ − x, ¼ − z, ¼ − y]
R3 = [¾ − x, ¼ + z, −¼ + y] S = [−¼ + y, ¾ − x, ¼ + z]
Q2 = [½ + z, ½ − x, −y]
The two shaded triangular facets are related
through the fourfold screw transformation
S = 41−(¼, ½, z)[0, 0, ¼], indicated in blue

62
(213) P4132 {R1, R2, R3, S, Q2 = R1R3} Q = R1R2
G = QR3 J = Q−1
R3
(R1R2)3 = (R1R3)
3 = S
4Q2
−1S
−2Q = S
4(QQ2
−1)2 = S
2J
−2 = S
4Q(R2R3)
2Q
−1 =
(QS4Q
−1)S
2(QS
4Q
−1)S
−2 = (Q
−1S
4Q)S
2(Q
−1S
4Q)S
−2 = (G
2J
3)2 = E
Z = S4
R1 = [¼ − x, ¼ − z, ¼ − y] R2 = [¼ − z, ¼ − y, ¼ − x]
R3 = [¼ + z, ¾ − y, −¼ + x] S = [¾ − y, −¼ + x, ¼ + z]
Q2 = [−z, ½ − x, −½ + y]
(214) I4132 {R1, R2, R3, R4, R5 = R2R3R2, Q = R1R5, S = R2R3}
(R1R2)2 = (R1R3)
3 = (R1R4)
3(R4R3)
3 = S
4Q
−1(R4R2)
4Q = (S
3R1S
2R1)
2 = E
Z = (R2R4)4 W = S
4Q(R1R4)
3Q
−1
R1 = [¼ − x, ¼ − z, ¼ − y] R2 = [x, −y, ½ − z] R3 = [−¼ + z, −¼ − y, ¼ + x]
R4 = [¼ + y, −¼ + x, ¼ − z] R5 = [¼ − z, ¼ − y, ¼ − x] S = [−¼ + z, ¼ + y, ¼ − x]
Shaded facets related through
S = 41(0, y, ½)[0, ¼, 0]
The two shaded triangular facets are related
through the fourfold screw transformation
S = 41(½, ¼, z)[0, 0, ¼], indicated in blue

63
(215) P 4 3m {M1, M2, R, M3 = RM1R} F = M1R Q = M1M2
K = QR L = Q−1
R
(M1M2)3 = (M3M2)
3 = (M1R)
4 = (M2R)
4 = (M3R)
4 = K
2L
2KL
2K
2L = E
Y = F
2M2RM2
M1 = [y, x, z] M2 = [x, z, y] R = [1 − x, y, −z] M3 = [1 − y, 1 − x, z]
F = [y, 1 − x, −z]
(216) F 4 3m {M1, M2, M3, M4} F = M1M2M3 Q = M3M1
(M1M2)2 =(M2M3)
3 = (M3M1)
3 = (M1M4)
3 = (M2M4)
3 = (M3M4)
2 = (M1M2M3)
4 =
(M2M3M4)4 = (M3M1M4)
4 = (M1M2M4)
4 = E
X = M4M1M2M4M3M1M2M3 W = M4M1M2M3M2M1
M1 = [x, z, y] M2 = [x, −z, −y] M3 = [y, x, z] M4 = [½ − y, ½ − x, z]
(217) I 4 3m { F , M, M2 = F−1
M F } Q = MM2
G = F M J = F−1
M K = Q F2 L = Q
−1F
2
(MM2)3 = ( F
2M)
4 = QG
3Q
−1J
3 = J
3G
3J
−3G
−3 = M( F Q)
2M( F Q)
−2 = K
2L
2KL
2K
2L = E
Z = ( F Q)−2
W = ZJ3
F = [½ − z, ½ − y, −½ + x] M = [y, x, z] M2 = [x, z, y]

64
Shaded triangular facets related through
S = 31(λ, 5/6 − λ, λ − 1/6)[−1/6,
1/6, −1/6]???
(218) P 4 3n {Q, F 1, F 2 } N = F 1−1
F 22
K1 = Q F 12 L1 = Q
−1F 1
2 K2 = Q F 2
2 L2 = Q
−1F 1
2
( F 12F 2
2)2 = (Q F 1
2F 2
2)3 = (Q F 1)
4 = (Q
−1F 2)
4 = ( F 1Q
−1)2( F 2Q)
−2 = (L1K2)
2 = (K1K2)
3
= (L1L2)3 = (K1L2
−1)3 = K1
3L2
−3 = K1
2L1
2K1L1
2K1
2L1 = K2
2L2
2K2L2
2K2
2L2 = E
Z = (Q−1
F 1)2
F 1 = [½ + z, ½ − y, ½ − x] F 2 = [½ + y, ½ − x, ½ − z]
(219) F 4 3c { F 1, F 2} Q = F 2 F 1−1
C = F 2 F 1−1
F 22
F 1
( F 2 F 1−1
)3 = ( F 1 F 2)
3 = ( F 1
2F 2
−1)4 = ( F 2
2F 1
−1)4 = E
Z = C2 W = (F2
−1F1
2)2
F 1 = [½ − x, −z, y] F 2 = [y, ½ − x, −z]
(220) I 4 3d {Q, F 1, F 2, S, R = Q F 22Q
−1} D = R F 2
K1 = Q F 12 L1 = Q
−1F 1
2 K2 = Q F 2
2 L2 = Q
−1F 2
2
( F 1 F 2−1
)3 = (Q F 1)
4 = (Q
−1F 2)
4 = ( F 1S)
4 = ( F 2S)
4 = K1
3L2
−3 = K2
3Q
−1L1
−3Q =
K12L1
2K1L1
2K1
2L1 = K2
2L2
2K2L2
2K2
2L2 = E
Z = (L1K1)2 W = D
2
F 1 = [¼ + z, ¾ − y, ¼ − x] F 2 = [¼ + y, ¾ − x, ¼ − z]
S = [z, 1 − x, ½ − y] R = [x, 1 − y, ½ − z]
Shaded triangular facets related through
S = 31(λ, 5/6 − λ, λ − 1/6)[−1/6,
1/6, −1/6]

65
(221) Pm 3 m {M1, M2 M3, M4} Q = M3M1 Q = M2(M3M2M1)2
(M2M3)4 = (M3M1)
3 = (M1M2)
2 = (M1M4)
4 = (M2M4)
2 = (M3M4)
2 = (M1M2M3)
6 =
(M2M3M4)4 = (M3M1M4)
6 = (M1M2M4)
4 = E
Z = QM4 Q−1
M2
M1 = [y, x, z] M2 = [x, y, −z] M3 = [x, z, y] M4 = [1 − x, y, z]
(222) Pn 3 n { Q , F } N1 = Q2
F Q3
F Q−2
N2 = Q2
F Q2( F
2Q )
2
( Q F )2 = ( Q F
2)6 = (Q F
−1)2 = ( Q F Q F
−1)2 = ( Q F Q
−1F )
3 = ( Q
3F
2)4 = E
Z = ( Q2
F )2
F = [½ + z, ½ − y, ½ − x] Q = [½ − z, ½ − x, ½ − y]
(223) Pm 3 n { R1, R2, M, M1, M2 = R1M1R1} Q = R2R1
Q = (MQ)3Q N = R1(MQ)
3
(R1R2)3
= M1M2R1R2 = (MR1)4 = (MR2)
4 = (MM1)
4 = (MM2)
4 = (M1R1)
6 = (M1R2)
2 =
(MQ)6 = E
Z = (R1QM)2
R1 = [½ − z, ½ − y, ½ − x] R2 = [½ − x, ½ − z, ½ − y]
M = [x, y, −z] M1 = [x, z, y] M2 = [z, y, x]
66
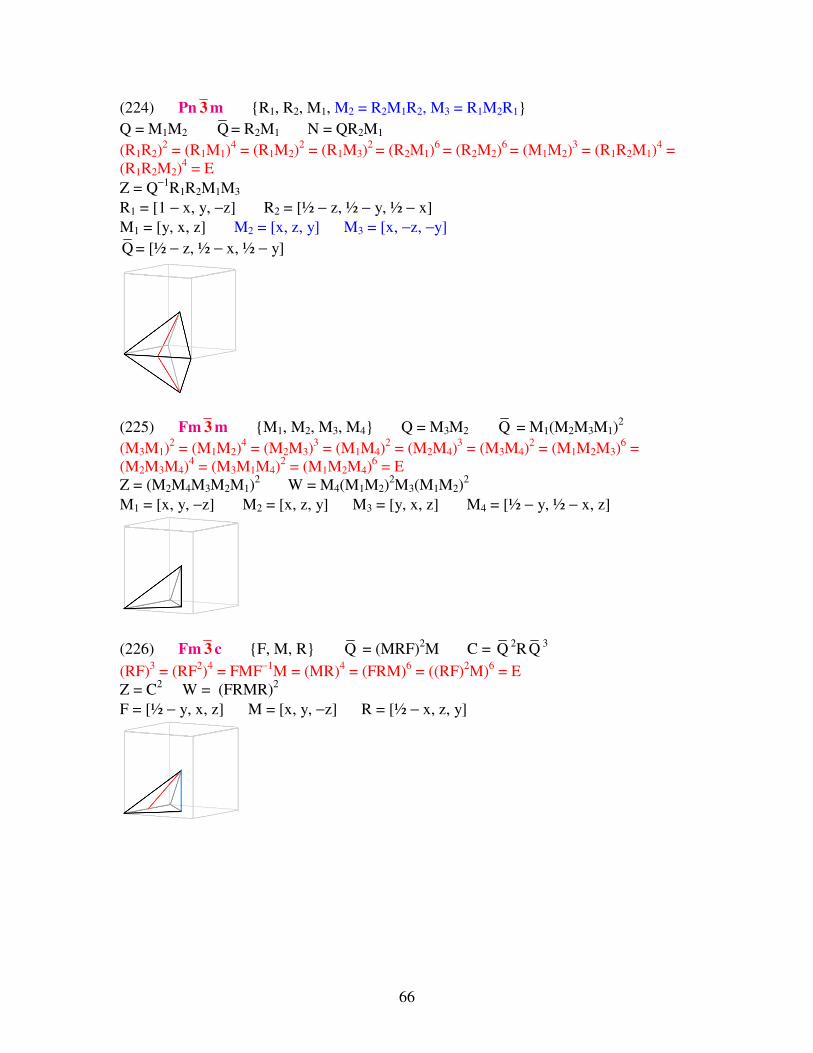
(224) Pn 3 m {R1, R2, M1, M2 = R2M1R2, M3 = R1M2R1}
Q = M1M2 Q = R2M1 N = QR2M1
(R1R2)2 = (R1M1)
4 = (R1M2)
2 = (R1M3)
2 = (R2M1)
6 = (R2M2)
6 = (M1M2)
3 = (R1R2M1)
4 =
(R1R2M2)4 = E
Z = Q−1
R1R2M1M3
R1 = [1 − x, y, −z] R2 = [½ − z, ½ − y, ½ − x]
M1 = [y, x, z] M2 = [x, z, y] M3 = [x, −z, −y]
Q = [½ − z, ½ − x, ½ − y]
(225) Fm 3 m {M1, M2, M3, M4} Q = M3M2 Q = M1(M2M3M1)2
(M3M1)2 = (M1M2)
4 = (M2M3)
3 = (M1M4)
2 = (M2M4)
3 = (M3M4)
2 = (M1M2M3)
6 =
(M2M3M4)4 = (M3M1M4)
2 = (M1M2M4)
6 = E
Z = (M2M4M3M2M1)2 W = M4(M1M2)
2M3(M1M2)
2
M1 = [x, y, −z] M2 = [x, z, y] M3 = [y, x, z] M4 = [½ − y, ½ − x, z]
(226) Fm 3 c {F, M, R} Q = (MRF)2M C = Q
2RQ
3
(RF)3 = (RF
2)4 = FMF
−1M = (MR)
4 = (FRM)
6 = ((RF)
2M)
6 = E
Z = C2 W = (FRMR)
2
F = [½ − y, x, z] M = [x, y, −z] R = [½ − x, z, y]
67
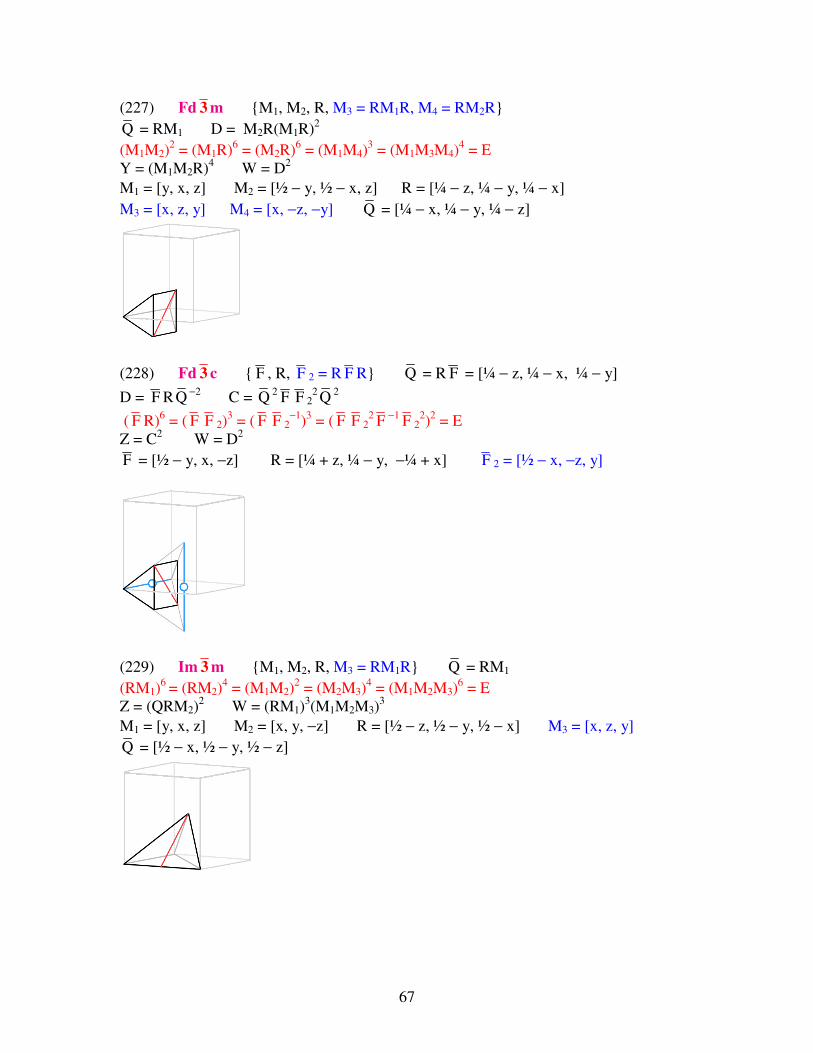
(227) Fd 3 m {M1, M2, R, M3 = RM1R, M4 = RM2R}
Q = RM1 D = M2R(M1R)2
(M1M2)2 = (M1R)
6 = (M2R)
6 = (M1M4)
3 = (M1M3M4)
4 = E
Y = (M1M2R)4 W = D
2
M1 = [y, x, z] M2 = [½ − y, ½ − x, z] R = [¼ − z, ¼ − y, ¼ − x]
M3 = [x, z, y] M4 = [x, −z, −y] Q = [¼ − x, ¼ − y, ¼ − z]
(228) Fd 3 c { F , R, F 2 = R F R} Q = R F = [¼ − z, ¼ − x, ¼ − y]
D = F RQ−2
C = Q2
F F 22Q
2
( F R)6 = ( F F 2)
3 = ( F F 2
−1)3 = ( F F 2
2F
−1F 2
2)2 = E
Z = C2 W = D
2
F = [½ − y, x, −z] R = [¼ + z, ¼ − y, −¼ + x] F 2 = [½ − x, −z, y]
(229) Im 3 m {M1, M2, R, M3 = RM1R} Q = RM1
(RM1)6
= (RM2)4 = (M1M2)
2 = (M2M3)
4 = (M1M2M3)
6 = E
Z = (QRM2)2 W = (RM1)
3(M1M2M3)
3
M1 = [y, x, z] M2 = [x, y, −z] R = [½ − z, ½ − y, ½ − x] M3 = [x, z, y]
Q = [½ − x, ½ − y, ½ − z]
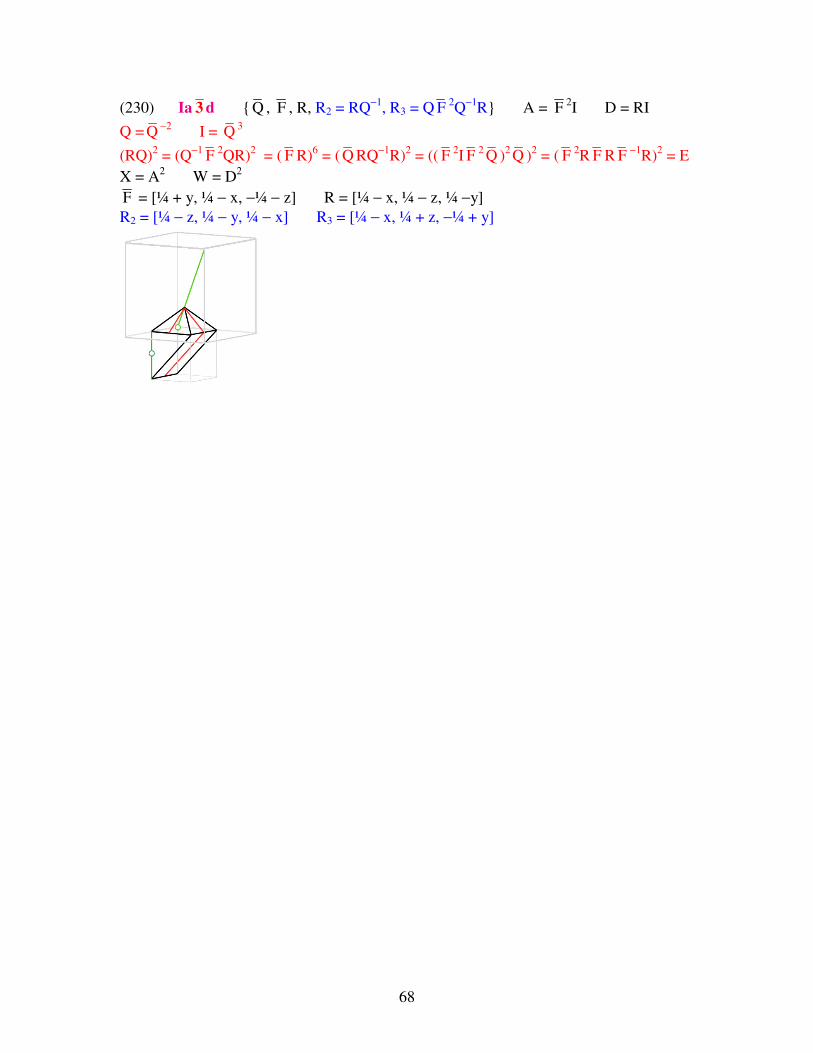
68
(230) Ia 3 d {Q , F , R, R2 = RQ−1
, R3 = Q F2Q
−1R} A = F
2I D = RI
Q = Q−2
I = Q3
(RQ)2 = (Q
−1F
2QR)
2 = ( F R)
6 = ( Q RQ
−1R)
2 = (( F
2I F
2Q )
2Q )
2 = ( F
2R F R F
−1R)
2 = E
X = A2 W = D
2
F = [¼ + y, ¼ − x, −¼ − z] R = [¼ − x, ¼ − z, ¼ −y]
R2 = [¼ − z, ¼ − y, ¼ − x] R3 = [¼ − x, ¼ + z, −¼ + y]

69
Appendix
Matrix methods
The realization of each abstract group as a group of Euclidean transformations in three-
dimensional Euclidean space corresponds to a representation of that abstract group in
terms of 4×4 matrices. For example (see group 195), R3 = [1 − x, 1 − y, z] denotes the
effect of multiplying x
y
z
1
x
y
z
1
on the left by matrix
1 1
1 1
1 0
0 0 0 1
−
−
, which can for convenience be abridged to the 3×4 matrix 1 1
1 1
1 0
−
−
because
the final row is always 0 0 0 1. If the final column of such a 3×4 matrix (which corresponds
to the shift of the origin brought about by the transformation) is null, this also can be
omitted. Thus, for example, (QR3)3 = E is represented by
QR3 = 1 1 1 1 0
1 1 1 1 1
1 1 0 1 1
−
− −
−
=
;
21 0 1 1
1 1 1 0
1 1 1 1
−
− −
− −
=
;
31 0 1 0 1 1 1 0
1 1 1 1 1 0 1 0
1 1 1 1 1 1 1 0
E−
− − −
− − −
= = =
This matrix method has been used extensively in the process of finding and checking the
generating relations.
An interesting exercise in the application of this method is to check the relations satisfied
by a twofold rotation R and a threefold rotation Q. For the cubic space groups there are
just six possible ways in which the two axes can be related, as indicated below. K = QR
and L = Q−1
R.
K3 = E K
4 = E
(KL)3 = E K
2 = E

70
K2L
2KL
2K
2L = E (K
2L
3)2 = E