On integrability of spinning particle motion in higher-dimensional rotating black hole spacetimes

GENERAL ARTICLE
Physics of a Particle on a Rotating Hoop∗
Experiment and Theory
Kushal Lodha, Anushree Roy and Sayan Kar
Kushal Lodha is a fifth year
undergraduate student in the
Integrated M.Sc. (Physics)
programme at IIT
Kharagpur.
Anushree Roy and Sayan Kar
are faculty members in the
Department of Physics, IIT
Kharagpur.
The simple textbook problem of a particle on a vertical, ro-
tating hoop is analysed both in theory and through exper-
iments. We begin by detailing out a somewhat generalised
theory, where the effect of dry friction as well as the possibil-
ity of a shift in the vertical axis of rotation are incorporated.
The bifurcation curves (plots of the angular position of stabil-
ity versus the angular frequency of rotation) are obtained for
all cases (i.e. with and without friction and a shift of the axis).
Thereafter we present the experimental set-up fabricated by
us and elaborate on the various measurements performed.
Finally, we demonstrate through our experiments how well
the theoretical results on the bifurcation curves tally with the
experimental findings. The match between theory and exper-
iment is found to be reasonably satisfactory. We conclude
by mentioning how various aspects of this simple problem as
well as its generalisations and extensions, are linked with dif-
ferent advanced areas of physics.
1. Introduction
Among the chapter-end problems given in Chapter 2 of the fa-
mous textbook on Classical Mechanics by Goldstein [1] (now by
Goldstein, Poole and Safko) we find the problem of a particle on
a rotating hoop. The same system is also discussed in detail, in
many texts on nonlinear dynamics, for example, in the book by
Strogatz [2]. It is quite amazing how this rather simple problem
has attracted the attention of many students and teachers over the Keywords
Classical mechanics, bifurcation
curves.last several decades. In addition, as we note at the end of our ar-
ticle, this problem and its generalisations can serve as a starting
∗Vol.25, No.9, DOI: https://doi.org/10.1007/s12045-020-1044-5
RESONANCE | September 2020 1261

GENERAL ARTICLE
point to many anWe take a re-look at the
physics of a particle on a
rotating hoop, both
theoretically and
experimentally.
advanced concept in physics.
In this article, we plan to take a re-look at the physics of a particle
on a rotating hoop, both theoretically and experimentally. The
theory is well-known. But actual experiments are few in number.
Moreover, the theory we outline later, is somewhat recent and the
experiment, as well as its comparison with theory has never been
attempted. In that sense, though simple, our results are indeed
new.
One of our primary objectives in this work is to verify experimen-
tally, a general relation between the equilibrium points and a con-
trol parameter of a given system, known as a bifurcation curve.
As the name suggests,One of our primary
objectives in this work is
to verify experimentally,
a general relation
between the equilibrium
points and a control
parameter of a given
system, known as a
bifurcation curve.
a bifurcation curve for a system, through
its nature, would demonstrate a notable, qualitative change in the
location of the equilibrium points, with gradual variation in a cho-
sen control parameter of the system. In addition, we also inves-
tigate the role of other variables and parameters in modifying the
functional nature (qualitative as well as quantitative) of the bifur-
cation curves, particularly in the context of our problem.
In the rest of the article, we have the following section-wise plan.
In the next section, we discuss the physics, the bifurcation dia-
gram and how the presence of dry friction and a shift of the axis
of rotation, can change the known results. Thereafter, in Sec-
tion 3, we discuss the set-up and the measurement techniques. In
Section 4, we look at theory versus experiment. As promised be-
fore, Section 5 looks at the connection of this problem with other
advanced areas of physics. We conclude with some remarks in
Section 6.
2. The Problem and its Physics
Let us begin by briefly recalling the problem. We have a spheri-
cal mass m (assumed a point mass) free to slide on a vertical ring.
Without anything else, this is the same as the problem of a pen-
dulum (not the simple pendulum) or a particle on a circle. We
now set the ring rotating at an angular speed ω about the vertical
axis passing through the centre. This problem of a particle on
1262 RESONANCE | September 2020

GENERAL ARTICLE
a rotating hoop/ring has a bunch of novelties. Firstly, one notes
that there is a critical frequency ω0 =
√
g
R(here g is the accel-
eration due to gravity and R is the radius of the ring). Above
ω0, i.e. for ω > ω0, the effective potential in the problem has a
double-well character. But for ω ≤ ω0, we have the usual single
well. In other words, one expects that for frequencies larger than
ω0, the particle can climb up from its position at the bottom of
the ring and stay put at a θ value which is different from θ = 0.
The various parameters and other details/conventions are shown
in Figure 1. In our work, In our work, we will
incorporate two
additional features: (a)
we will ask what
happens when we shift
the vertical axis of
rotation away from the
centre of the ring, (b) we
will also include the
effect of dry friction.
we will incorporate two additional
features: (a) we will ask what happens when we shift the verti-
cal axis of rotation away from the centre of the ring, (b) we will
also include the effect of dry friction. Including these additional
features, we will introduce the notion of a bifurcation curve for
this problem. Recall that a bifurcation curve in general plots the
equilibrium points versus a control parameter. In our problem,
the equilibrium points are the angles at which the ball is stable
on the rotating hoop, while the chosen control parameter is the
angular frequency of rotation of the hoop. The bifurcation curve
for our system does show a ‘bifurcation’ (more precisely known
as a ‘pitchfork bifurcation’), because the plot is not just a simple
monotonous curve but exhibits a change in nature at or around
a specific value of the angular frequency and beyond. We will
compare the modified bifurcation curves with those without shift
of the axis and/or dry friction.
Let us now move on to describing the mathematical formulation
of the problem.
2.1 Equations of Motion, Effective Potentials
The Lagrangian of the system without shift of the axis (in Figure
1) or dry friction is given as:
L =1
2mR2θ
2 +1
2mR2ω
2 sin2θ + mgR cos θ,
=1
2mR2θ
2 −
[
−mgR cos θ −1
2mR2ω
2 sin2θ
]
, (1)
RESONANCE | September 2020 1263

GENERAL ARTICLE
Figure 1. Ball rotating off
the axis.
where θ is the angle coordinate (see Figure 1), R is the radius
of the hoop, ω the frequency of rotation and g the acceleration
due to gravity. One can extract the effective potential from the
Lagrangian above by simply writing
Ve f f (θ) = −mgR cos θ −1
2mR2ω
2 sin2θ. (2)
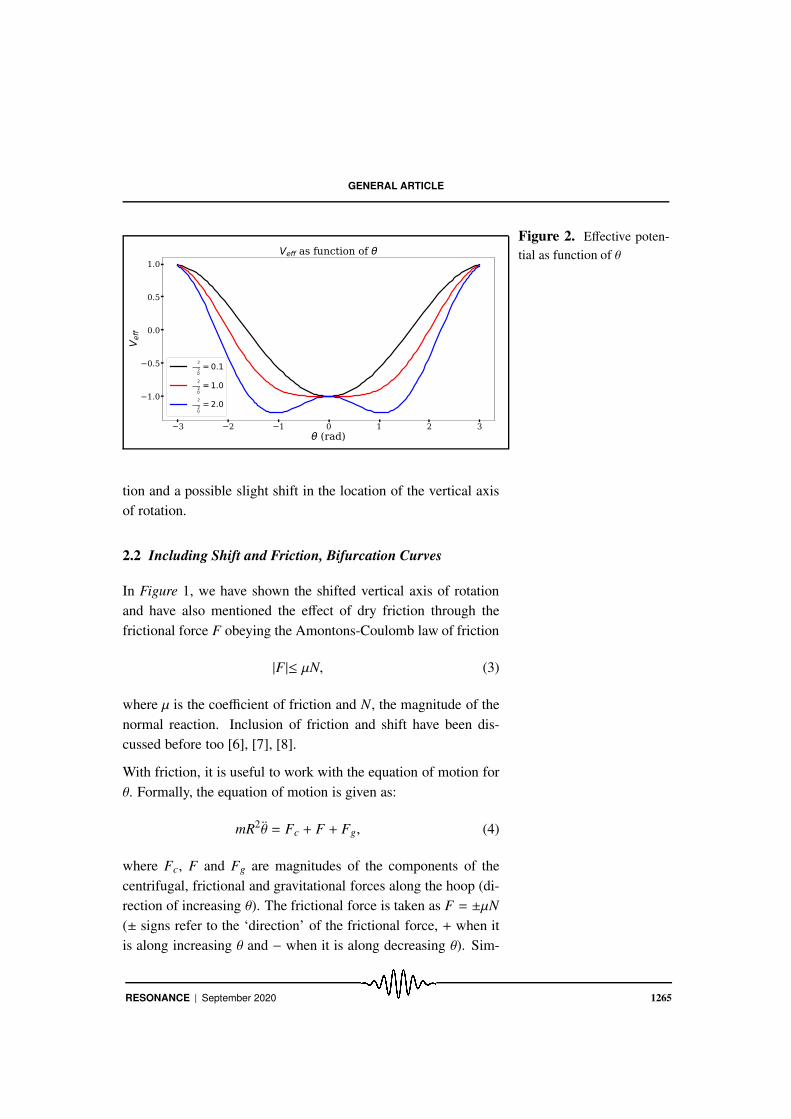
An analysis of the extrema of the effective potential reveals the
interesting fact that they are different for the two cases ω > ω0
and ω ≤ ω0. The graphs for the potentials are shown in Figure 2.
We notice that for ω > ω0 we have a double well, as mentioned
before, while for ω ≤ ω0 we have a single well potential.
To account for the finite size of the spherical mass (ball) m, we
replace the radius (R) by the distance from the centre of the hoop
to the centre of mass of the ball (Rcm).
One can also write down and solve the equations of motion for θ
exactly, in terms of Jacobian elliptic functions [5] but we are not
interested in that here. Instead, we try and see how some realistic
features can be included in the problem by incorporating dry fric-
1264 RESONANCE | September 2020
GENERAL ARTICLE
Figure 2. Effective poten-
tial as function of θ
−3 −2 −1 0 1 2 3θ (rad)
−1.0
−0.5
0.0
0.5
1.0
V eff
Veff as function of θ
ω2
ω20=0.1
ω2
ω20=1.0
ω2
ω20=2.0
tion and a possible slight shift in the location of the vertical axis
of rotation.
2.2 Including Shift and Friction, Bifurcation Curves
In Figure 1, we have shown the shifted vertical axis of rotation
and have also mentioned the effect of dry friction through the
frictional force F obeying the Amontons-Coulomb law of friction
|F|≤ µN, (3)
where µ is the coefficient of friction and N, the magnitude of the
normal reaction. Inclusion of friction and shift have been dis-
cussed before too [6], [7], [8].
With friction, it is useful to work with the equation of motion for
θ. Formally, the equation of motion is given as:
mR2θ = Fc + F + Fg, (4)
where Fc, F and Fg are magnitudes of the components of the
centrifugal, frictional and gravitational forces along the hoop (di-
rection of increasing θ). The frictional force is taken as F = ±µN
(± signs refer to the ‘direction’ of the frictional force, + when it
is along increasing θ and − when it is along decreasing θ). Sim-
RESONANCE | September 2020 1265

GENERAL ARTICLE
plifying the equation of motion we get
θ =
[
ω
2(
sin θ +a
R
)
cos θ
]
−[
ω
20 sin θ
]
±
[
µ
(
ω
20 cos θ + ω2
(
a
R+ sin θ
)
sin θ
)]
, (5)
=
[
ω
2 sin θ cos θ − ω20 sin θ +
(
a
Rω
2 ± µω20
)
cos θ (6)
±µω2 a
Rsin θ ± µω2 sin2
θ
]
.
In the R.H.S of the first equation above, the contributions of the
three terms corresponding to the centrifugal force, the gravita-
tional force and the frictional force are each shown within sepa-
rate square brackets. The effect of shift appears in the replace-
ment of sin θ by sin θ + aR
in all terms related to the centrifugal
force contributions.
θ = 0 corresponds to equilibrium at θ = θc. It leads to the fol-
lowing expression for ω2±, which has been nicely obtained in the
papers by Burov and collaborators [6].
ω
2± = ω
20
∓µ cos θc + sin θc
( aR+ sin θc)(±µ sin θc + cos θc)
. (7)
The above relations yield the bifurcation curves, which are plots
of the equilibrium position θc as a function of ωω0
. Note that these
expressions are not invertible, i.e. one cannot write θc as a func-
tion of ω.
If a < 0, the shift is in the opposite direction by an amount |a|.
One can check from Eqn.(7) and Figure 3, that the a > 0 and
a < 0 bifurcation curves are obtainable from each other through a
reflection about the ωω0
axis. In other words, with a < 0 and θc →
−θc, one finds ω+ → ω− and ω− → ω+. Thus, the functional
form of ω+ in Eqn. (7) (for a > 0) matches with the functional
form of ω− with a < 0 and θc → −θc. Later, when we match with
experiments, we will plot ω+ as a function |θc| (i.e. the magnitude
of θc).
Without friction or a shift of the axis, the bifurcation curve is just
1266 RESONANCE | September 2020

GENERAL ARTICLE
an inverse cosine function ofω
20
ω
2 . It is given as:
ω
20
ω
2= cos θc, (8)
for ω > ω0. The curve demonstrates a ‘bifurcation’ at ω = ω0
–known in nonlinear dynamics as the pitchfork bifurcation. How-
ever, with friction and a = 0 the bifurcation seems to happen near
frequencies smaller in value than the ω0 mentioned above. With
µ and a both non-zero, the bifurcation curve still has differences
with the µ = 0, a 6= 0 curves. We observe some of these features
in our experiments later.
In summary, as stated In summary, as stated
just above, in the
presence of shift and
friction the overall shape
of the bifurcation curve
changes in a quantitative
sense.
just above, in the presence of shift and
friction the overall shape of the bifurcation curve changes in a
quantitative sense. Further, there are now two values for ω, i.e.
ω± and hence two bifurcation curves corresponding to the fric-
tional force being F = +µN and F = −µN. The region between
these two curves is in accordance with the Amontons-Coulomb
friction law which says |F|≤ µN.
Typical bifurcation curves for a 6= 0, µ 6= 0 and for a 6= 0, µ = 0,
a = 0, µ 6= 0, a = 0, µ = 0 are shown in Figure 3. When either µ
or a are non-zero, differences arise which are evident from these
curves.
2.3 What we Hope to See in the Experiments
In our experiment, In our experiment, we
intend to verify the
bifurcation curves
obtained in the previous
section. In particular,
with friction and a shift
of the rotation axis, we
would like to see how
good a match between
theory and experiment (a
result not shown
anywhere yet in the
literature on this
problem) is possible.
we intend to verify the bifurcation curves
obtained in the previous section. In particular, with friction and a
shift of the rotation axis, we would like to see how good a match
between theory and experiment (a result not shown anywhere yet
in the literature on this problem) is possible. We have measured
θc as a function of ω. The ‘upper sign’ (plus) is used while fitting
the bifurcation curves. In other words, we use the expression for
ω
2+ in Eqn. (7).
In addition, we have independently measured the coefficient of
friction µ, in order to verify its fitted value, as obtained from the
analysis of the bifurcation curves.
RESONANCE | September 2020 1267

GENERAL ARTICLE
Figure 3. Theoretical bi-
furcation curves for (a) a =
0 (b) a > 0 (c) a < 0 with
the dotted line representing
the case for µ = 0. For
µ 6= 0, the curve splits into
two branches– the red and
black curves represent these
branches,ω+ andω− respec-
tively.
A video-clip (Link [13]) of our set-up in action is provided along
with this article. The rise of the ball on the rotating hoop, beyond
a certain value of the angular frequency of rotation may easily be
noted while viewing the video. In particular, one also notices that
the rise of the ball seems to begin at a value of ω which is smaller
in value than ω0 =
√
g
R(hear the beep at ω0 while the video
is played). Later, in this article, we will record this fact in our
experiments and show similar results from the related quantitative
measurements (bifurcation curves) we have performed.
3. Experimental set-up and measurements
3.1 Setup
The designed setup is shown in Figure 4. Different parts are
marked by alphabets A-H and are discussed below. The circular
hoop (A), made of aluminum, is of radius ≈ 17.8 ± 0.1 cm with
a U-shaped cross-section of width 2.78 ± 0.01 cm and height of
1268 RESONANCE | September 2020

GENERAL ARTICLE
Figure 4. Experimental
setup. All parts, discussed in
the text, are marked.
2.20 ± 0.01 cm. A spherical ball (B) with a low coefficient of
static friction is allowed to roll in the groove of the hoop. The
diameter and mass of the ball are 2.46 ± 0.01 cm and 60 ±1 gm,
respectively. Here we state that the error bars quoted just above
correspond to the least counts of the instruments used for the mea-
surements. For example, a meter scale was used to measure the
diameter of the hoop, a slide caliper to measure the diameter of
the ball and a simple electronic weighing machine to measure the
weight of the ball. The material of the ball is unknown to us
(collected from a Christmas decoration shop). The surface of the
ball appears quite smooth and the ball could roll freely along the
groove of the hoop. For our experimental requirements we mea-
sured the coefficient of static friction between the ball and hoop,
independently. We will discuss this measurement later.
The hoop is connected to an aluminum supporting unit (Figure 4
and in Figure 5 (a) ). To shift the axis of the hoop with respect
to the axis of rotation, the following arrangement has been made.
Holes (M, N, O, P, X and Y) are bored on a plate C1 and block
C2 (see Figure 5(a) and (b)). While C1 can be attached to the
RESONANCE | September 2020 1269

GENERAL ARTICLE
aluminum supporting unit of the hoop using screws and nuts (at
J and K in Figure 5(b)), the lower part C2 is connected to the
axle shaft, which is driven by a 12 Volt DC motor (D in Figure
4 and 5(a)). Both components, C1 and C2, can be assembled in
different settings. When holes M, N, O, P, X and Y of both plates
(see Figure 5 (b)) are set onto each other and fixed, the hoop is
expected to rotate about its axis. The holes on each side of the
center of the plates are separated by ∼ 1 cm. To introduce a shift
of ∼+1, ∼+2 cm between the axis of rotation and the centre of
the hoop, C1 and C2 were fixed keeping the hole O of C1 on
the hole M of C2, and the hole X of the plate C1 on the hole
M of the block C2, respectively. Similarly, the plates could be
adjusted to have a relative shift in the opposite direction. The gear
motor (D) has a gear ratio of 60:1. The whole assembly is placed
on a base, made of a perspex sheet (E in Figure 4 and Figure
5). The base is equipped with levelling screws. These adjustable
screws and a spirit level are used to ensure that the base of the
setup is horizontal. A gear-shaped aluminum disk (F in Figure
4 and also see Figure 5(c)) with 64 cogs is sandwiched between
the motor and the block C2 with screws and nuts. The disk F
rotates between a LED and photo-detector, set in a perpendicular
direction of a plane of the hoop (see Figure 5(c)) and the whole
unit is used as a tachometer.
A 14 MP camera (SJ4000) (H in Figure 4) with a pixel dimension
of 4032×3024 is fitted at the top of the hoop to have an overhead
view of the ball. It is a wireless camera that can record a video
for about an hour at 60 frames per second. A simple stopwatch is
used to synchronize the video time-step with inputs applied at the
frequency controller.
A separate setup (see Figure 5(d)) is used to measure the coef-
ficient of static friction between the ball and the material of the
hoop. It consists of a clamp holder holding a rod (wooden pencil).
One end of two threads are connected to two ends of a wooden
plank and the other ends to two sides of the rod (see Figure 5(d)).
The plank holds a U-shaped aluminium piece (of the same ma-
terial as of the hoop) that allows the free movement of the ball.
1270 RESONANCE | September 2020

GENERAL ARTICLE
Figure 5. (a) Part of the
setup to hold the hoop and
to provide a required shift
between the axis of rotation
and the centre of the hoop.
(b) Arrangement of holes on
the plate C1 and the block
C2. (c) Arrangement to de-
tect the rotational frequency
(d) Set up to measure the co-
efficient of static friction be-
tween the ball and the hoop.
Using clamp holder one can vary the inclination and thus mea-
sure the coefficient of static friction. The measured coefficient of
static friction is 0.04±0.01. The measurement procedure will be
discussed later in Section 3.2.3.
3.2 Measurements
There are three different measurements which we have carried out
in order to obtain the relevant information for plotting the bifurca-
tion curves. These measurements are discussed in the following
subsections.
3.2.1 Measurement of the angular frequency of the hoop
The revolutions per minute (rpm) of the DC motor is controlled
by a motor-driver. The motor driver is driven by an external pulse-
width-modulated signal from an Atmel A89S52 micro-controller
chip. The desired rpm is sent as a digital signal to the chip us-
ing a set-reset key. Recall that the disk F along with a LED and
RESONANCE | September 2020 1271

GENERAL ARTICLE
photo-detector set (G in Figure4 and also see Figure 5 (b)), ar-
ranged in the perpendicular to the plane of the hoop, is used as a
tachometer. When the photo-detector is illuminated by the LED
it converts a light signal to a voltage. As the disc F rotates, the
cogs obstruct the photo-detector at regular intervals. The periodic
light signal, thus produced, is passed through an ADC (Analog to
Digital converter) and yields a digital signal. This signal is fed
to a microprocessor to compute the angular frequency. Since the
disc F has 64 cogs, for N×64 pulses in a minute, the micropro-
cessor measures N rpm. The advantage of this technique is the
following: ideally, one can change the frequency of rotation of
the hoop with a step of 1/64 rpm.
3.2.2 Measurement of the inclination of the ball
The wireless camera, H in Figure 4, placed at the top of the hoop,
is used to measure the position of the ball in the hoop while we
change the frequency of the rotation of the hoop. It records a
video starting from the powering of the motor to switching off
the motor. Thus, the whole video carries the information of the
positions of the ball in the hoop at all frequency steps. The video
is processed using an OpenCV code [3].
The code primarily does two tasks
1. Detects the ball and determines the centre of the ball.
2. Correlates pixel length to the inclination (θ) of the ball with re-
spect to the centre of the hoop.
For the first part, the code splits the full video frame-by-frame
(one of such frames is shown in Figure 6(a)). Each frame is com-
posed of pixels, which have RGB (Red-Green-Blue) attributes.
RGB is a common colour model to quantify colours in colour
photos or in computer display. A bandpass filter is constructed
which allows only a certain range of RGB values correspond-
ing to colour of the ball. Pixels which pass through this filter
are marked as white whereas rejected pixels are marked as black.
This filter converts the frame into a binary image (Figure 6(b)).
1272 RESONANCE | September 2020

GENERAL ARTICLE
Figure 6. Conversion of
RGB image into binary by
means of the bandpass filter.
Application of erosion and dilation filter removes any small blobs
that may be left by the bandpass filter. Using a combination of
Canny Edge detector and Hough Circle Transform, the ball is de-
tected by fitting an equation of a circle, (x−a)2+(y−b)2 = r2, with
parameters a, b and r. These parameters, for each position of the
ball, are saved to files for further processing. It is to be noted that
the coordinates of the ball, thus obtained, are expressed in pixels,
and they do not correspond to physical units. With the change in
inclination of the ball in the hoop, the coordinates of the ball are
displaced by a certain pixel length.
The second task involves correlating the apparent shift in pixels
to physical coordinates by applying triangle similarity rule using
the focal length of the camera lens and the diameter of the hoop.
The measured value of the inclination is quite accurate for a lower
angle of inclination, however it deviates from the true value for
larger angles.
RESONANCE | September 2020 1273

GENERAL ARTICLE
Figure 7. Schematic di-
agram for the principle of
measuring the static friction
between the ball and the
hoop.
3.2.3 Measurement of static coefficient of friction between
the ball and the hoop
The measurement is based on a simple technique, conceptually
thought of by da Vinci and, later furthered by Amontons and
Coulomb.
Our purpose, in doing this experiment, is to check the value of
µ obtained later from the main experiment, using an alternative
route.
If the coefficient of friction between a ball and a plane (refer to
Figure 7) is µ, the magnitude of the maximum force ( fmax) of
friction is given by the equation as fmax = µN, where, N is the
magnitude of the normal force between two bodies. If φ is the an-
gle of tilt of the plane (with respect to the horizontal axis), when
the ball just starts to slide from its rest position, then the coeffi-
cient of friction µ = tan(φ). In contrast, if the ball rolls down (no
sliding) we know the result as µ ≥ 27
tan φ [10], which leads to the
well-known fact that µ for pure rolling is less than that for µ for
pure sliding.
In our experiment, we slowly increase the inclination of the plane
by adjusting the clamp holder and carefully notice when the ball
just starts to move. The inclination is estimated by measuring
the height by which the plank is raised (y) and the length of the
plank (x) using a slide caliper. Thus, if the ball slides down, the
1274 RESONANCE | September 2020

GENERAL ARTICLE
Figure 8. Bifurcation curve
when the hoop rotates about
its axis.
expected value of µ = tan(φ) = y/x=0.04±0.01. If the ball rolls
down, our result from this experiment would then be µ ≥ 0.01 ±
0.01.
Here we would like to mention that we did not make any special
effort to disentangle the effect of rolling friction from that sliding
friction while carrying out the above experiment. The expected
value of µ between the ball and hoop is thus µ ≥ 0.01 or µ =
.04 (for pure sliding). As we shall see later, these values do not
contradict the µ obtained in the main experiment.
4. Theory Versus Experiment
We are now ready to draw the final bifurcation curves. Refer
to Figure 1. We allow the hoop to rotate at a given frequency
(ω) and then measure the inclination (|θc|) of the ball from the
vertical axis. We demonstrate a possible match between theory
and experiment for the various cases with different shifts between
the axis of the hoop and the axis of rotation (a values in Section
2.2).
For calibration of the setup, we begin with ω vs. θ measurements
by keeping the axis of the rotation of the hoop the same as that of
the axis of the hoop, i.e. for one to one correspondence between
RESONANCE | September 2020 1275

GENERAL ARTICLE
all holes in C1 and C2, see Figure 5(b). The data-points in Figure
8 show the measured data for a bifurcation curve.
The best fit (red solid line) to the data points with Eqn. 7 could
be obtained for the values of R= 16.2 ± 0.2 cm, µ=0.042 ± 0.004
and a=0 with the value of χ2 as 0.008. Here the error bars corre-
spond to the standard deviation of the parameters, obtained from
the fitting procedure. We note the following: (i) Recall that the
radius of the hoop is R=17.8±0.1 cm. Taking the correction for
finite size of the ball (i.e. beyond point mass approximation), the
effective radius of the hoop is expected to be Rcm=16.6±0.1 cm,
which is close to the fitted value (16.2±0.2 cm) obtained above.
(ii) The value of µ for the best fit to the data points is close to the
measured value of sliding friction (µ = 0.04 ± 0.01). The blue
dashed line in Figure 8 is the plot for µ=0 in Eqn. 7. Comparing
with the theoretical bifurcation plot in Figure 3, it can be seen
that we have shown the experimental data points in the range of
0.7 < ω/ω0 < 1.1 where ω0 ≈ 7.77 rad/s. In this region the
effect of friction is maximum. Note that both dashed line (with-
out friction) and solid line (fitted to the experimental data points)
nearly merge for higher values of θ. We consider the results ob-
tained from the bifurcation curve in Figure 8 as a calibration of
the setup and use the estimated values of R and µ to study the bi-
furcation curves with a given offset between the axis of rotation
and the axis of the hoop. Here we would also like to mention that
to observe the effect of friction in the dynamics of the ball, we al-
lowed the ball to slide in the U-shaped groove of the hoop, rather
than on the edge, as reported in [7].
The symbols in the bifurcation curves in Figure 9(a) and (b) plot
the data points when the axis of rotation of the hoop and the axle
of the motor is shifted mechanically by +1 cm and -1 cm, re-
spectively. Similarly Figure 9 (c) and (d) plot the same for the
shift between the two by +2 cm and -2 cm. As the holes in the
plates C1 and C2 in Figure 5(b) are hand-drilled, these offset val-
ues (∼ ±1 or ∼ ±2) may not be accurate. Thus, while fitting the
experimental data points using Eqn. 7 we kept a as a free fit-
ting parameter. The values of R and µ are kept fixed to the above
1276 RESONANCE | September 2020

GENERAL ARTICLE
Figure 9. Bifurcation
curves for offset axes. The
shift between the axis of the
hoop and axis of rotation are
(a) a= +1 cm, (b) a= -1 cm,
(c) a= +2 cm and (d) a= -
2 cm in the setup. + (with
closed symbol) and – (with
open symbol) correspond to
right and left offset of the
axis of rotation. The cor-
responding fitted curves are
shown by red and blue solid
lines. The fitted value of
a± (standard deviation), ob-
tained from the fitting pro-
cedure, is mentioned in each
panel. The dashed curves in
each figure is the fitted bifur-
cation curve from Figure 8
for a=0.
mentioned values obtained from the calibration curve in Figure
8. The best fit to the data points are shown by solid lines for (a)
+a=1.21 ±0.05 cm, (b) −a=1.18±0.06 cm, (c) a=2.00 ±0.06 cm
and (d) −a=1.79 ±0.06 cm. The fitted curves match the experi-
mental data points fairly well for 0.15 ≤ θ ≤ 0.65. Here we would
like to mention that as θ is a complicated function of ω, we used
ω as dependent variable to fit data points in Figure 8 and Figure
9 using Eqn. 7. However, to keep the similarity between theoret-
ically and experimentally obtained bifurcation plots, we reversed
the axes in these figures.
RESONANCE | September 2020 1277

GENERAL ARTICLE
5. Connecting the Problem with Other Areas of Physics
As we mentioned at the outset,This problem has links
with many an advanced
area in physics. In fact it
can be used as a
wonderful pedagogical
example while
introducing these
advanced areas. We shall
highlight three such
areas and discuss them
briefly.
this problem has links with many
an advanced area in physics. In fact it can be used as a wonderful
pedagogical example while introducing these advanced areas. We
shall highlight three such areas and discuss them briefly below.
The simplest link of this problem (without friction or axis shift)
with an area other than mechanics, is a similarity with a Landau
second order phase transition and spontaneous symmetry break-
ing. The analogy proceeds by building the correspondence of
temperature (T ) with angular velocity (ω), critical temperature
with critical angular velocity (ω0) and order parameter η with
the stable equilibrium angle θc. The pitchfork bifurcation can be
linked with a η–T phase diagram. Details are available in the nice
articles by Sivardiere [9].
As we have seen, the problem without rotation is that of a pendu-
lum (not a simple pendulum). One can study the semi-classical
physics of this problem with rotation by going over to Euclidean
time (t → −iτ). Newton’s 2nd law in Euclidean time becomes
‘mechanics in τ in an inverted potential’. One can solve the equa-
tion of motion in τ to obtain a class of solutions known as ‘instan-
tons’ [12]. Using the instantons and the semiclassical approxima-
tion of the path-integral kernel (amplitude) one can obtain the
tunneling probabilities for a quantum particle to move across the
barriers in this potential [11]. A periodic potential generalisation
of this problem (as well as the pendulum), when analysed using
the so-called dilute instanton gas approximation yields a nice ex-
ample illustrating band structures and dispersion relations [12].
‘Instantons’ have numerous applications in quantum field theory,
quantum gravity and many areas of high energy physics [12].
If one maps this problem to its field theoretic analog in two space-
time dimensions (t → xi and x(t) → φ(xi)) one obtains a nonlin-
ear field theory known as double sine-Gordon field theory [11].
The mapping of the pendulum problem, i.e. without rotation,
yields a two dimensional field theory known as sine-Gordon the-
ory [12]. Both these theories have well-known solitary wave
1278 RESONANCE | September 2020

GENERAL ARTICLE
solutions, which represent coherent structures born out of non-
linearity. Such solitary waves behave like ‘particles’ .The more
special dispersion-less propagation happens for ‘solitons’ which
exist in sine-Gordon but not in double sine-Gordon theory. The
sine-Gordon and double sine-Gordon solitons and solitary waves
have been studied quite extensively in theory as well as in exper-
iments over many years and are still of reasonable interest today.
Broadly, solitons are widely used in condensed matter physics
and optics too.
6. Concluding Remarks
We summarize below our results and what we have been able to
show in this work.
We have analysed a simple text-book problem in classical me-
chanics both experimentally and theoretically. The theory has
been around in the literature–we have re-written the essential de-
tails in a simpler way. Subsequently, we have fabricated the set-
up and used it for experiments. The specific details of our set-up
as well as the methodology employed to carry out the observa-
tions have been outlined in full detail in this article. Though a
simple experiment there are many subtleties which need to be
taken into account and we have spelt out our procedures exten-
sively.
Through our experiments, we have We feel that given the
lack of mechanics
experiments in our
undergraduate
curriculum, his
experiment with
appropriate
modifications can
provide a good model
example, worth
introducing to younger
students within their
curriculum or through a
short-term project.
tried to verify the theoretical
findings – in particular the bifurcation curves in the presence of
shift and friction. We have succeeded in verifying the ω versus θc
relations over a reasonable range of ω and θc. This confirms, to
some extent, the validity of the theoretical formulae.
It is a fact that the set-up has many deficiences and our observa-
tion methods can be improved. However, within the limitations,
we believe that we have been able to provide a reasonable match
between theory and experiment in the context of this problem.
We also feel that given the lack of mechanics experiments in our
undergraduate curriculum, this experiment with appropriate mod-
ifications can provide a good model example, worth introducing
RESONANCE | September 2020 1279

GENERAL ARTICLE
to younger students within their curriculum or through a short-
term project.
7. Acknowledgements
The authors thank Bikash Mondal in the Electronic Repair Sec-
tion and Goutam Mondal in the Mechanical Fabrication Section
of CWISS, IIT Kharagpur for their help and support in making
the set-up. They also thank Apoorva Sinha and Harmanjot Singh
Grewal for their participation in the initial stages of this work.
The motivational video attached with this article was recorded
and edited for our purposes by Suman Chatterjee. We thank him
and Anang Kumar Singh for their help in recording the video.
Suggested Reading
[1] H Goldstein, Classical Mechanics, 2nd Edition, Narosa Publishing House, New
Delhi, India (2001).
[2] S H Strogatz, Nonlinear Dynamics and Chaos, Perseus Books Publishing (1994),
p.55, p.61.
[3] A Rosebrock, Ball Tracking with OpenCV, PyImageSearch Blog, 2015.
[4] A Rosebrock, Measuring the size of objects in an image with OpenCV, PyIm-
ageSearch Blog, 2016.
[5] T E Baker and A Bill, Jacobi elliptic functions and a complete solution of the
bead on the hoop problem, American Journal of Physics, Vol.80, 506 2012.
[6] A A Burov, On bifurcations of relative equilibria of a heavy bead sliding with
dry friction on a rotating circle, Acta Mechanica, 212 (3-4), pp.349–354, 2010;
A A Burov and I a Yakushev, Bifurcations of the relative equilibria of a heavy
bead on a rotating hoop with dry friction, Journal of Applied Mathematica and
Mechanics, Vol.78, 460, 2014.
[7] L A Raviola, M E Veliz, H D Salomone, N A Olivieri and E E Rodrıguez, The
bead on a rotating hoop revisited: an unexpected resonance, European Journal
of Physics, Vol.38, p.015005, 2017.
[8] An interesting toy called the ‘Groove Tube’ was used to work on this problem.
Details are in the papers by R. V. Mancuso, A working mechanical model for
first and second order phase transitions and the cusp catastrophe, American
Journal of Physics, Vol.68, 271, 2000; R V Mancuso and G A Schrieber, An im-
proved apparatus for demonstrating first and second order phase transitions,
American Journal of Physics, Vol.73, 366, 2005.
[9] J Sivardiere, A simple mechanical model exhibiting spontaneous symmetry
breaking, American Journal of Physics, Vol.51, 1016, 1983.
1280 RESONANCE | September 2020

GENERAL ARTICLE
[10] M Gottlieb and S Chandra, www.feynmanlectures.caltech.edu/info/exercises/
roll without slipping.html
Address for Correspondence
Sayan Kar
Department of Physics and
CTS
Indian Institute of Technology
Kharagpur 721302, India
[11] S Kar, An instanton approach to quantum tunneling for a particle on a rotat-
ing circle, Phys. Letts’., Vol.A 168, 179, 1992; S Kar and A Khare, Classical
and quantum mechanics of a particle on a rotating hoop, American Journal of
Physics, Vol.68, 1128, 2000.
[12] For a good and easy-going introduction to solitons and instantons see Chapters
2, 4 and 10 of R Rajaraman, Solitons and Instantons, North Holland (1987).
[13] https://drive.google.com/file/d/1yRkIjniB93Q GLf5oo-4cuy54oU72LNA/
view?usp=sharing
RESONANCE | September 2020 1281