Gear Trains
76
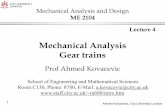
A. BASIC CONCEPTS 1.0 VELOCITIES IN GEAR TRAINS 1.1 Introduction Gear trains and speed reducers are mechanical components often used for obtaining a desired angular velocity of an output shaft, while the input shaft rotates at a different angular velocity. The angular-velocity ratio between input and output members must usually remain constant. The value of this ratio can be adjusted in some arrangements (usually with a friction or hydraulic drive and/or clutch arrangement), while in others the ratio is not adjustable. In order, therefore, to design or select a gear train or speed reducer, one of the first tasks Is the determination of the angular velocities. This will now be considered. 1.2 Single Gear Mesh Figures 1, 2 show simple spur-gear meshes with the gears meshing externally (Figure 1) or internally (Figure 2) on fixed centers. Let ϖ 1 = angular velocity of gear #1, ϖ 2 = angular velocity of gear #2, N 1 = number of teeth on gear #1; N 2 = number of teeth on gear #2. positive counterclockwise; positive counterclockwise; In the external mesh (Figure 1) the gears rotate in opposite directions while in the internal mesh (Figure 2) the gears rotate in the same direction. This means that if the angular velocity, ϖ 1 , is positive, angular velocity ϖ 2 will be negative in Figure 1 and positive in Figure 2. Figure 1 Externally Meshing Spur Gears T58
-
Upload
giang-t-le -
Category
Documents
-
view
43 -
download
1
Transcript of Gear Trains

A. BASIC CONCEPTS1.0 VELOCITIES IN GEAR TRAINS
1.1 IntroductionGear trains and speed reducers are mechanical components often used for obtaining a desiredangular velocity of an output shaft, while the input shaft rotates at a different angular velocity.The angular-velocity ratio between input and output members must usually remain constant. Thevalue of this ratio can be adjusted in some arrangements (usually with a friction or hydraulicdrive and/or clutch arrangement), while in others the ratio is not adjustable. In order, therefore,to design or select a gear train or speed reducer, one of the first tasks Is the determination ofthe angular velocities. This will now be considered.
1.2 Single Gear Mesh Figures 1, 2 show simple spur-gear meshes with the gears meshing externally (Figure 1) orinternally (Figure 2) on fixed centers.
Let ω1= angular velocity of gear #1,ω2= angular velocity of gear #2,N1 = number of teeth on gear #1;N2 = number of teeth on gear #2.
positive counterclockwise;positive counterclockwise;
In the external mesh (Figure 1) the gears rotate in opposite directions while in the internalmesh (Figure 2) the gears rotate in the same direction. This means that if the angular velocity,ω1, is positive, angular velocity ω2 will be negative in Figure 1 and positive in Figure 2.
Figure 1 Externally Meshing Spur Gears
T58

Figure 2 Internally Meshing Spur Gears
The angular velocity ratio, Z21, is defined as the ratio of the angular velocity of gear #2 tothat of gear #1, with appropriate attention to sign. Thus: In Figure 1, Z21 = ω2 = - N1 (1) ω1 N2and in Figure 2, Z21 = ω2 = N1 (2) ω1 N2
The opposite signs on the right-hand sides of eqs. (1, 2) follows from the fact that in theexternal mesh the gears rotate In opposite directions, while in the internal mesh they rotate inthe same direction, as has been stated before. In bevel gears the situation is similar, but the angular velocity vectors lie on intersecting,rather than parallel axes. Figure 3 shows an externally meshing bevel gear pair. The notation Is the same as in Figures1, 2, except for the angular velocity vectors, ω1 and ω2 These are defined as follows. Let 0 be the point of intersection of the two shaft axes. Then the positive directions of theangular velocity vectors, ω1, ω2, are directed outward from point 0. The magnitudes of theangular velocity vectors, ω1, ω2, are denoted by ω1, ω2 respectively. The direction of rotation of a bevel gear is then obtained from the right-hand rule, asillustrated in Figure 4: if the angular velocity vector, ω1, is as shown, the direction of rotation ofthe associated bevel gear corresponds to that of a right-handed screw advancing in the directionof vector ωi . The angular velocity ratio, Z21, in Figure 3 is again given by:Z21 = ω2 in magnitude. (3) ω1
T59

Figure 3 Externally Meshing Bevel Gears
Figure 4 Right-hand Rule
For externally meshing bevel gears, one angular velocity vector is directed away from 0, whilethe other angular velocity vector is directed towards 0. The case of spur gears may be regardedas a special case in which point 0 recedes to infinity. The angular velocities in helical and worm gears can be analyzed by similar reasoning. Fordetails the reader is referred to paragraphs 5.9.4 and 8.5, respectively, in the Section on GEARS.
1.3 Simple Spur-Gear TrainsIn a simple gear train, such as shown in Figure 5, only one gear is mounted on each shaft.Suppose the ith gear (i = 1, 2, 3,......., n) has N teeth and rotates with angular velocity, ωi,measured positive counterclockwise. Then the angular velocity ratio, Zj1, of the jth gear relativeto the first gear is given by:
Zji = wj = ± Ni (4), where w1 Nj
T60

the + sign applies when j is odd; and the - sign applies when j is even. This follows directly fromthe fact that the directions of rotation of adjacent shafts are opposite for externally meshinggears. For internal gear meshes eq. (4) needs to be modified so as to account for the fact thatshafts connected by an internal-gear mesh rotate in the same direction.
1.4 Compound Spur Gear TrainsSuch a gear train is shown in Figure 6. In a compound gear train at least one shaft carries two ormore gears. In the typical train shown in Figure 6, all gears are keyed to their respective shafts,so that the angular velocities of all gears are equal to that of the shaft on which they aremounted. The angular velocities of adjacent shafts are governed by the gear ratio of theassociated mesh. Let Ωi denote the angular velocity of the jth shaft, going from left to right, measured positivecounterclockwise. Then
Hence the angular velocity ratio, Z~, of shaft 5 to shaft 1, is given by:
where
Hence, for this train,
(5) This is also equal to the ratio of the angular velocity of gear 8 to that of gear 1.
Figure 5 Simple Gear Trains Figure 6 A Compound Gear Train Extended with Idler Gears
T61

1.5 Reverted Gear TrainsA reverted gear train Is a compound gear train at least one gear of which rotates freely on theshaft on which it is mounted, so that its speed is different from that of its shaft. In Figure 7, for example, gear #1 is rigidly connected to shaft A and gears #2, 3 are rigidlyconnected to shaft B. Gear #4, however, is free to rotate on shaft A. In this case,
Hence, the gear ratio, Z41, is given by:
While this formula is analogous to eq. (5), the difference is that angular velocity, w4, is notgenerally equal to ω1, even though both gears are mounted on the same shaft.
Figure 7 Reverted Gear Train
1.6 Simple Planetary Spur Gear TrainsA planetary or epicyclic gear train is one in which the axis of at least one of the gears is moving.The simplest such train consists of three members, such as shown in Figure 8. It consists of astationary or sun gear (#1), a planet gear (#2) rolling externally on the sun gear and an arm(#3). The motion of planet 2 consists of a rotation about its axis (02), while that axis is rotatingabout the axis, 01, of the sun gear. In this sense the motion is like that of a planet around thesun. The path of a general point on the planet (inside the pitch circle) Is an epicycloidal path andhence, this gear train is also called an epicyclic gear train.
T62

Figure 8 Simple Planetary Spur Gear Train
For purposes of kinematic analysis we consider the more general case In which all threemembers are moving, but point O1 remains fixed. Let the angular velocities of the sun gear,planet and arm be denoted by ω1, ω2, ω3, respectively, the positive sense beingcounterclockwise. We consider the actual motion of the system as composed of two motions: a. Motion with the arm: the gears and arm rotate as one integral unit about the center of thesun gear; b. Motion relative to the arm: the gears rotate about fixed centers while the arm is stationary. We then sum both motions in such proportion that the motion is the real motion of thesystem. For example, if gear #1 is stationary, its angular velocity when summed must vanish.This procedure can be conveniently carried out in tabular form and hence is known as the tabularmethod:
Motion Gear #1 Gear #2 Arm #3Rotationwith arm x x x
Rotationrelativeto arm
Y
z21Y
O
Σ (Sum) ω1 = X + Y ω2= X + Z21Y ω3 = X
Hence ω1 = X + Y (i)
ω2 = X+Z21Y (ii)
ω3 = X (iii)
T63

Eliminating X, V from eqs. (i, ii, iii), we have:
(7)This is the general relationship between the angular velocities of the gears and arm. It followsthat when all members are free to rotate, it is a two-degree-of-freedom system. Now we specialize to the case of Figure 8 by setting w1 equal to zero. Eq. (7) then becomes:
(8) From eq. (8) we note that the angular velocity of the planet is the difference of two angularvelocities: the angular velocity of the arm and the angular velocity of the planet relative to thearm. For this reason such gear trains are also sometimes called differential gear trains. In the case of an internal spur gear mesh eq. (7) remains valid, the value of Z21 now beingpositive. The analysis of planetary bevel gear trains can be developed in a similar manner, with carefulattention to the vector directions of each of the angular velocities.
1.7 Compound Planetary Spur Gear TrainsThese are also known as coupled epicyclics. Such trains consist of several Interconnected simpleplanetary spur gear trains. The interconnections can result in complex systems and practice isrequired in order to gain an understanding of their characteristics. A number of methods havebeen proposed for the kinematic analysis of compound planetary gear trains. A method whichseems relatively straightforward and general is based on the following considerations. Any compound planetary gear train, as stated above, consists of a set of interconnectedsimple planetary gear trains. We can write the general equation (7) for each simple gear trainand solve these for the various angular velocities. In order to carry Out this procedure we needto identify the two gears and the arm for each simple train, as well as the fixed member, if any.Planets in parallel are discarded inasmuch as these are kinematically redundant. They are usedfor strength and torque capacity.We illustrate the procedure in the case of the planetary gear train shown in Figure 9. Thisconsists of an input arm, 2; a sun gear, 1; a floating link, 3, mounted on the arm and integralwith the coaxial planets 3', 3", and an output gear, 4, coaxial with the axis of the arm. This is a compound planetary gear train consisting of two simple planetary trains. The firstconsists of arm 2, planet 3' and sun gear 1; the second consists of arm 2, planet 3M and gear 4.We rewrite eq. (7) in the general form: Zjiωi - ωj (1 - Zji)ωk = 0 (9),where i, j, denote the gears and k denotes the arm. The number of teeth on each gear and theangular velocities are defined as follows:Gear 1: N1 teeth; ω1Arm2 : ω2 Link 3 : ω3Gear 3': N3' teeth; ω3Gear 3": N3" teeth; ω3Gear 4: N4 teeth; ω4
T64

Angular velocities are positive counterclockwise when viewed from arrow A in Figure 9. For the first simple planetary train: i = 1, j = 3' and k = 2, while for the second, i = 3", j = 4and k = 2. Substituting these values into eq. (9), we have: Z3'1 ω1 - ω3 + (1 - Z3'1)ω2 = 0 (i) Z43" ω3 - ω4 + (1 - Z43")ω2 = 0 (ii)
Since the sun gear is stationary, we set ω1 = 0. Also: Z3'1 = - N1/N3' and Z43" = - N3 (iii) N4Substituting (iii) into (i) and (ii) - and letting ω1= 0 - we can solve for the angular velocity ratio,Z24 = ω4/ω2: Z24 = ω4 = 1 - N1N3" (10) ω2 N3N4While some compound planetary trains are far more complex than that of Figure 9, theprocedure for the kinematic analysis is the same.
Figure 9 Planetary Gear Train
1.8 Bevel-Gear DifferentialsA differential Is a planetary gear train having two degrees of freedom and with input and outputshafts usually (but not necessarily) coaxial. The most familiar form of the bevel gear differential is shown schematically in Figure 10. Itconsists of a planet (gear #2) engaging two equal bevel gears (#1, #4) and an arm (#3). Theaxes of bevel gears 1 and 4 and arm 3 coincide and are always perpendicular to the axis ofplanet
T65

gear 2. Usually all three gears are of the same size, so that Z21 = Z24 and are of unit magnitude.The differential is a combination of two simple planetary bevel gear trains: 1-2-3' and 4_2_3". InFigure 10, unit vector i lies along the axes of gears 1,4 and arm 2, while unit vector i lies alongthe axis of planet 2, both vectors directed outward from the point of intersection, 0, of the axesof gears 1-4 and 2. In this case it 18 simplest to apply the tabular method to the entire differential:
Motion Gear I Gear 2 Arm 3 Gear 4Motion with arm xi xi xi xiMotion relative to
arm Yi - Yj O - Yi
Σ (Sum) ω1 = (X + Y)i ω2 = Xi + Yj ω3 = Xi ω4 = (X - Y)i
In the table the vectors ω1 (i = 1, 2, 3, 4) denote the vector angular velocities of the fourmembers of the train. The magnitudes of ω1, ω2, and ω3 and ω1, ω3, and ω4, respectively. From the last row of the table: ω1 = X + Y (i) ω3 = X (ii) ω4 = X - Y (iii)Eliminating X, V from eqs. (i, ii, iii), we have, (11) ω3 = 1/2 (ω1 + ω4)
Figure 10 Schematic of Bevel Gear Differential
T66

Hence, the angular velocity of the arm is equal to the average of the angular velocities ofgears 1 and 4. If gears 1 and 4 rotate at the same speed, both the arm and gears 1 and 4 move as a singleunit. If, however, gear 1 is stationary, for example, the speed of the arm is one half that of gear4.
When the speeds of two members are given (the members being gear 1, gear 4 and the arm),the speed of the third is determined. Conversely, if only the speed of the arm is specified, theaverage of the speeds of gears 1 and 4 is equal to that of the arm, but the magnitude of thespeeds of each gear would be a function of the resisting load on shafts 1 and 4. The latter, forexample, is the case in an automobile differential in which shafts 1 and 4 are the tire axles andarm 3 is geared to the driveshaft.
2.0 FORCE TRANSMISSION IN GEAR TRAINS
2.1 GeneralExcept for starting and stopping, the gears in gear trains usually operate at constant angularvelocities. A static force analysis suffices for most purposes and hence this discussion will belimited to statically transmitted forces. For the dynamic tooth load, the reader is referred to thereferences at the end of the Section on GEARS. For design purposes two types of forces need to be considered at the very beginning of geartrain design. The first is associated with bearing reactions and the second with powertransmission. The power-transmitting forces are needed in sizing gears and in determiningefficiencies. They act tangentially at the pitch line and transmit the force from one gear to ameshing gear. In this paragraph frictional effects will be neglected. Frictional effects will beconsidered, however, in the determination of power loss and efficiencies, in which friction can bevery significant. It is important to realize that the tooth load between gears includes both tangential andnormal components - the latter due to the pressure-angle effect. For purposes of powertransmission, however, we are interested only in the former. Bearing reactions In gear trains canbe quite complex, especially in helical, bevel, worm and hypoid gearing. To determine these thereader is referred to the references, especially Ref. 3 listed in the Section on GEARS.
2.2 Tangential Forces In A Single Spur Gear MeshWe consider the simple spur gear train shown in Figure 1 together with Figure 11, which showsthe pitch circles and nomenclature.
A driving torque, M1 (positive counterclockwise) acts on gear #1 and a load torque, M2 (alsopositive counterclockwise) acts on driven gear #2. Let Wt
ij = tangential force transmitted by gear i to meshing gear j, acting at the pitch line. InFigure 11, Wt
21 is positive when vertical and up, as shown. For static equilibrium of gear #1, we have,
M1 + Wt21 R1 = 0 (12),
where R1 denotes the pitch radius of gear #1 and moments have been taken about axis 01 ofgear #1. Hence,
Wt21 = - M1 (13).
R1
T67
Hence

Figure 11 Nomenclature for Spur Gear Mesh of Figure 1
Since action and reaction are equal and opposite, we have Wt
12 = - Wt21 = M1 (14),
R1the positive direction of all forces being vertically up. If M1 is in in-lbs and R1 in inches, then Wt
21
and Wt12 will be in lbs.
If the input horsepower (H.P.), rather than the input torque, is given we convert as follows: M1(in-lbs) = 6600 (H.P.)/ω1 (15),
where ω1 denotes the angular velocity of gear #1 in rad/sec, positive counterclockwise.If the input speed of gear #1 is given as N1 RPM (positive counterclockwise), eq. (15) becomes: M1 (in-lbs) 63025 (H.P.)/N1 (16). The situation for single internal, helical and bevel gear meshes is analogous.
2.3 Tangential Forces In The Simple Spur Gear TrainWe again consider the simple spur gear train shown in Figure 5. Assume a counterclockwise inputtorque, M1, acting on gear #1, which is rotating counterclockwise at ω1 rad/sec., as shown. Let ω1 = angular velocity of gear i, positive counterclockwise and let Wt
ij = tangential forceexerted by gear i on gear j21 positive vertical and up. The tangential force, Wt
21, is determined from eq. (13). Consider next the equilibrium of gear #2. The tangential forces are shown in Figure 12. Takingmoments about axis O2: R2Wt
32 - R2Wt12 = 0 (17)
T68

Figure 12 Gear 2 of Figure 5 and Forces Acting on it
whence Wt
32 = Wt12 = M1 (18).
R1
Hence, Wt32 acts vertically up. Since the pitch-line speeds of all gears are identical in magnitude,
we conclude that the tangential forces, Wtij, are identical in magnitude and direction.
2.4 Tangential Forces In Compound Spur Gear TrainsWe again consider the compound spur gear train shown in Figure 6, with counterclockwise inputtorque, M1, and with gear #1 rotating counterclockwise at ω1 rad/sec. To determine the tangentially transmitted forces we utilize the fact that in the absence offriction there is no power loss in the system. Hence, the power transmitted through mesh i-j isequal to the input power. Hence, M1ω1= Wt
ij Rjωj (i)
This yields
Wtij = M1ω1 (ii)
Rjωj
where Rj, wj denote pitch radius and angular velocity of gear j, as previously defined.The angular velocity ratios can be determined by the methods described in paragraph 1.4. Forexample, in Figure 6, suppose we wish to find the tangential force acting between gears 7 and 8.Then from eq. (20) with i = 7 and j = 8, we have,
Wt78 = M1ω1 (iii).
R8ω8
and from eq. (5),
ω8 = N1N3N5N7 (iv) ω1 N2N4N6N8
Substituting (22) into (21), we have, Wt
78 = M1 N2N4N6N8 (v) R8 N1N3N5N7
T69

Since Wt78 is positive, it acts vertically up.
Reverted gear trains can be handled in an analogous manner, attention being given to thesign conventions for forces, torques and angular velocities.
2.5 Planetary Spur Gear Trains The analysis again involves the conditions of static equilibrium for the members of the train.We illustrate the procedure by considering the compound, planetary spur gear train shown inFigure 9. In the figure, M2 denotes the input torque, acting on arm 2, and M4 the load torque exertedon gear 4. In order to clarify positive senses of rotations and torques, Figure 13 shows an endview of the train In the direction of arrow A of Figure 9. It is now convenient to denote all forcesby the symbol Fij, where Fij means the force exerted by link i on link j (it follows that Fji = - Fij ).The positive directions of horizontal and vertical forces are to the right and up, respectively.
Figure 14 represents a free-body diagram of arm 2. Taking moments about point 0: M2 - F32R = 0 (i),
where R = OP (length of arm). Hence,
F32 = M2 (ii). R
Figure 13 End View of Gear Train Shown in Figure9
Figure 14 Free-Body Diagramof Arm 2 of Gear TrainShown in Figure 9
T70

The forces acting on floating link 3, which includes the two planet gears 3' and 3", are shown inFigure 15. The equations of equilibrium for link 3 are: F13 + F43 + F23 = 0 (iii)and R3" F43 + R3' F13 = 0 (iv),
where R3', R3" denote the pitch radii of gears 3', 3", respectively. Solving for F43 and F13 from eqs. (ii, iii, iv), we find:
F43 = - M2R3 (v) R(R3" - R3')
F13 = - M2R3" (vi). R(R3' - R3") This shows that when R3' < R3", as is the case in this example, F43 acts towards the left and F13towards the right (Figure 15).
Figure 15 Free-Body Diagram of Link 3 of Gear Train Shown in Figure 9
Finally we consider the equilibrium of output member 4, as shown In Figure 16. Taking momentsabout point O:
- F34R4 + M4 = 0, so that M4 = F34 R4 (vii)
M4 = M2R3'R4 (viii) R(R3" - R3')
Although eq. (viii) is not needed in the determination of the forces, it leads to the followinguseful check on the consistency of the derivations. Since this analysis assumes negligible friction, we can equate input power to output power:
M2ω2 + M4ω4 = 0 (ix),
T71

whence M4 = - ω2 (x). M2 ω4 Substituting the right-hand side of eq. (viii) for M4 and the right-hand side of eq. (10) forω4/ω2 into (x), with R = R1 + R3. and R4 = R1 + R3' - R3", it is not difficult to show that eq. (ix) issatisified identically. The forces in planetary gear trains can be very high. In this example, F43 and F13 becomevery large when R3. and R3 are nearly equal (see eqs. (v) and (vi)), i.e. if large reduction ratiosare involved. This can be important in the analysis of power losses, which will be discussed in thesection on efficiencies.
Figure 16 Free-Body Diagram of Gear 4 of Gear Train Shown in Figure 9
2.6 The Bevel Gear DifferentialIn bevel gears the tangential forces, Fij, are considered as acting at the mean pitch radius. Wenow consider the bevel gear differential shown in Figure 10. Figures 17a, b, c, d show end viewsof the pitch circles of various gears and a view of the arm - the former from A and the latter fromC, respectively, in the direction of center 0. The notation is as shown. Unit vectors I, j areoutwardly directed from point 0 along OA and OB, respectively. The angular velocities of gears 1,4, and the arm are related according to eq. (11): ω3 = 1/2(ω1 + ω4) (11).
We now consider the equations of static equilibrium. From Figure 17a, M1 - F21R = 0 (i) ... F21 = M1/R (ii)
From Figure 17b, M4 - F24R = 0 (iii),
T72

whence F24 = M4/R (iv).From Figure 17c, F12R=F42R (v)and F12 + F32 + F42 = 0 (vi).Let F12 = F42 = F(say) (vii)so that from (ii) and (iv) we have M1 = M4 = M(say) (viii);Hence, from (vi), F32 = - 2F (ix).From Figure 17d, M3 = F23R = 2FR (x)Now M1 = M4 = F21R = - FR (xi).Hence, M1 + M3 + M4 = 0 (xii),which is a consistency check. From the conservation of energy: M1ω1 + M4ω4 + M3ω3 = 0 (xiii),or - FR ω1 - FR ω4 + 2FR ω3 = 0 (xiv),or ω3 = 1/2(ω1 + ω4) (xv),which confirms eq. (11). Summarizing: ω3 = 1/2(ω1 + ω4) (11) M1 = M4 = - FR (xi)and M3 = 2FR (x).
T73

Now it power is applied to arm 3 (as is the case in an automotive differential, for example), M3and ω3 are given inputs. Then M1 = M4 = - 1/2 M3 and the power output will be (-M1ω1) at shaft#1 and (-M4ω4) at shaft 4 (i.e. the shaft carrying gear #4). If ω1 = ω3 + ∆ω (xvi)and ω4 = ω3 - ∆ω (xvii),where ∆ω is a measure of the differential speed relative to arm, then - M1 ω1 = 1/2 M3ω1 = 1/2 M3(ω3 + ∆ω) (xviii)and - M4 ω4 = 1/2 M3 ω4 = 1/2 M3 (ω3 - ∆ω) (xix).
Hence, the fraction of power delivered to shafts 1 and 4 depends on the speed differentialrelative to the arm. In an automotive differential, for example, in which planet 2 is geared to thedrive shaft, this speed differential Is determined by the radius of the turn made by the
T74

automobile. In general, for differentials operating with more than -one degree of freedom,speeds and power flow depend on the resisting torques or load torques exerted on the outputshafts. The torque distribution and power flow through differential and planetary gearing can be quitecomplicated, but the principles of their determination remains the same as in the above example.
3.0 POWER FLOW
3.1 General
The determination of power flow in gear trains is important for several reasons. It is needed indetermining power losses and efficiencies. In some of the more complicated gear trains thepower may branch and the circulation of power within the system may even exceed thetransmitted power. In instrument and control applications the efficiencies ale often critical, whilein power applications both power flow, distribution and efficiency may be critical. In simple and compound gear trains-the determination of power flow is generallystraightforward If as a first approximation friction is neglected the condition that input power isequal to output power, is generally sufficient to determine power flow. The problem becomesmore difficult in power-dividing trains, such as planetary gear trains and differentials. Thefollowing gives an elementary account of the subject. For a more in-depth treatment, thefollowing references are recommended:-- (i) "Gear Handbook", D.W. Dudley, Editor-in-Chief, McGraw-Hill Book Co. Inc., New York, N.Y.1962:-- (ii) "Spur Gears" by E. Buckingham, McGraw-Hill Book Co Inc., New York, N.Y., 1928. (iii) "Gear Trains" by H.E. Merritt, Sir Isaac Pitman and Sons Ltd., London, 1947.The latter two are old classics, but still very worth while.
3.2 Fundamentals: The Single Gear Mesh
We consider once again the simple gear train shown in Figure 1 and the associated nomenclaturedefined in paragraphs 1.2 and 2.2. Assume torques Mi (i = 1, 2) and angular velocities (i = 1, 2)acting on gears 1 and 2, respectively, the positive direction being counterclockwise. If M1 is given in in-lbs and ω1 in rad/sec, the input power will be in units of in-lb/sec. In theabsence of frictional losses, the conservation of energy yields
M1ω1+M2ω2 = 0
i.e. input power is equal to output power. For power-flow purposes, however, it is more useful to work with forces and linear velocities,rather than-with torques and angular velocities. For example, the tangentially transmitted forcemultiplied by the pitch-line velocity also gives the power transmitted across gear meshes. In thefollowing let us assume that input torque (M1) and speed (ω1) are counterclockwise and that thepositive direction of forces and velocities is vertical and up. In Figure 1 the tangentially transmitted force, Wt
12, acting on gear 2 is given by theexpression:
Wt12 = M1 lbs (19a)
R1
The pitch-line velocity, v12, is given by:
v12 = R1ω1 (19b)
T75

Hence, the power transmitted from the driving to the driven gear is equal to the product: Wt
12v12 = (M1/R1) (R1ω1) = M1ω1, as before. For purposes of power flow determination, it is useful to summarize the preceding in thefollowing table:
The product (Wt12v12) of tangential force acting on gear #1 and pitch-line velocity is negative,
while the product of tangential force (Wt12v12) acting on gear #2 and pitch-line velocity is
positive. At the same time we know that the power flow is directed from gear 1 towards gear 2.Hence, we have the following
PRODUCT RULE:
The power flow is directed from the gear having the negative force-velocity productto the gear having the positive force-velocity product, the force being the tangentialforce acting on that gear. This is a useful and general criterion for the calculation of power flow, including gear trains inwhich the power flow is more complicated.
3.3 Simple And Compound Gear TrainsIn a simple spur gear train, each gear transmits the input power to the adjacent gear and thepower flow is straightforward. In many compound gear trains, such as that of Figure 6, the situation is the same. In some compound trains, such as that of Figure 18, power branching may occur. In Figure18 the input power(M1ω1) splits into two branches at point A, one delivering (-M5ω5) and theother (-M4ω4) in-lb/sec. The problem becomes determinate if we know either one of these, inview of the energy-conservation condition: M1ω1+M4ω4+M5ω5=0. The problem is then reduced tothe power flow in three simple gear trains: O1A, AO2 and AO3.
file:///C|/A1/SDP/D220/HTML/D220T076.htm (1 of 2) [11/14/2000 9:58:05 AM]

T76
Hence

3.4 Planetary Spur Gear Trains
We consider once again the planetary gear train shown in Figure 9 and Figures 13, 14, 15.Although this is not a split-power train it illustrates the general procedure involving theforce-velocity products very well. In Figure 13 let us assume a counterclockwise input torque (M2) and input angular velocity(ω2). Since the power does not branch it follows that the input power, (M2 ω2), is transmittedthrough every link of the system. Let us confirm this now by independent calculation of theforce-velocity products. Let Pij denote the power transmitted by link i to link j. Note that Pji = - Pij. The powertransmitted by arm 2 to link 3 (planet carrier) is given by: P23 = F23 v23 (i),where v23 is the linear speed of point P (Figure 13), the axis of the pin joint connecting links 2and 3. As in the previous derivations velocities are positive to the right and forces are positivevertically up in the views shown in Figures 13, 14, 15. From Par. 2.5, we have F23 = - M2/R (ii).Furthermore, v23 = - R ω2 (iii). Hence, for link 3 the force-velocity product is ( - M2/R) ( - R ω2) = M2 ω2 and this is positive.For link 2, F32 = - F23 = M2/R and v23 is unchanged. Hence, the force-velocity product for link 2is negative. Thus we conclude that the total input power (M2 ω2) is transmitted from link 2 to link3. Since the pitch-line speed for the mesh between sun gear 1 and gear 3' is zero, no power istransmitted through this mesh, as is obvious. Considering now the mesh between gear 3" and gear 4, the force F34 was given in paragraph2.5 as follows: F34 = M2R3 (iv) R(R3" - R3') Furthermore, v34 = - R4ω4 = - R4 ω4 ω2 (v). ω2Replacing Ni by Ri in eq. (10), we have, ω4 = R3'R4 - R1R3" (vi). ω2 R3R4Combining eqs. (iv) and (v),
T77

F34v34 = - M2ω2R3'R4 (R3'R4 - R1R3") R(R3" - R3') R3'R4 = - M2ω2 (R3'R4 - R1R3") (vii) R(R3" - R3') If gear 4 is indeed the driven gear and our procedure is correct, it is necessary that theproduct F34 v34 be positive and equal to M2 ω2, i.e. it is necessary that R3'R4 - R1R3" = -1 (viii). R(R3" - R3') Setting R = R1 + R3' and R4 = R3' - R3", and substituting Into (viii), we readily obtain therequired identity. Hence, the force-velocity product rule gives the correct power flow for the gear train. The procedure In more complex cases remains the same and is particularly useful in thedetermination of power loss and efficiency, which will be explained next.
4.0 GEAR TRAIN EFFICIENCY
4.1 GeneralPower losses in gear trains are associated principally with two factors: tooth friction and churninglosses. Churning losses are relatively independent of the nature of the train and the reductionratios and for this reason they tend to be less significant in the design stage than frictionallosses. Churning losses are difficult to calculate and for a discussion of what information isavailable on the subject the reader is referred to Ref. 3 (Gear Handbook) cited in the referencesin the section on GEARS. The frictional losses, which are strongly dependent on the arrangement of the gear train andthe reduction ratios, have been the subject of considerable investigation. Tables are available forcalculating the energy lost by friction during tooth engagement for a single mesh as a function ofpressure angle, gear ratio, gear size, and an assumed average value of the coefficient of friction.These tables involve an analysis of the contact forces and sliding velocities occurring betweencontacting gear teeth. The choice of an average coefficient of friction Is based on the materialsinvolved, the lubricant, if any, service conditions and experience. For details the reader isreferred to the literature cited at the end of the section on GEARS. For preliminary design calculations the significance of power-loss determination can beparticularly high in gear arrangements involving split power paths and/or large reductions, suchas can occur in planetary gear trains and differentials. In such trains power loss due to frictioncan be critical and needs to be estimated in order to size both the gears, and the capacity of themotor or other driving element. In order to arrive at an estimate, which provides a good first approximation with minimumcalculation, we follow the recommendation of Buckingham (Spur Gears, McGraw-Hill, 1928),which is still a good one even today. This, in effect, states that for average operating conditions,the power loss at each mesh can be approximated as 1 % of the potential power transmittedthrough the mesh. Figures quoted in the literature vary from less than 1/2% to 2% and thereader can always adjust the percentage if desired. The concept of potential power, which will be explained in the following paragraph, providesan estimate of power loss which is acceptable for preliminary design purposes. If more preciseinformation is needed, the reader is referred to the literature cited in paragraph 3.1 on
T78

power flow, Inasmuch as the phenomena involved are complicated, the only completely reliableprocedure for determining power loss (as in all other cases as well!) is prototype testing.However, there is no reason to exaggerate the difficulty of the calculations. The subject of powerflow and losses is often regarded and treated as a mysterious specialty. It is not. The basicprinciples are simple and readily evaluated. In the following we shall attempt to explain them.
4.2 The Basic Principle Of Power-Loss DeterminationEvery spur gear train consists of a combination of simple meshes consisting of two meshinggears and the associated arm, as shown in Figure 19. Except in very rare cases the arm is eitherstationary or rotating about a fixed axis (the axis of one of the gears). Once we can determinethe power loss in this simple system we can determine the power loss in an entire planetary orother gear train.
Figure 19 Planetary Spur Gear Train
In Figure 19 both gears and the arm are rotating. The tangentially transmitted force, F12,between gears 1 and 2 can be determined according to the methods described in Par. 2.0. According to Buckingham the rate at which power is lost In friction is proportional to theproduct of the tangentially transmitted force and the velocity of tooth engagement. The linearvelocity of tooth engagement is equal to the product of the pitch radius and the angular velocityof tooth engagement.
If the arm were stationary the linear velocity of tooth engagement would simply be thevelocity, v12, of the pitch point P. If on the other hand the arm and gears are rotating as onerigid system about point 01, there is no relative motion between the gears and the velocity oftooth engagement vanishes. It follows, therefore, that the linear velocity of tooth engagement,VE12, is the magnitude of the difference between the velocity of the pitch point, P, and thevelocity of the instantaneously coincident point on the arm: VE12 = - (ω2 R2 - ω3 R2) = - (w2 - w3) R2 (20),the positive direction of VE12 being to the right.
T79

The magnitude of the product of F12 and vE12 is the potential power according to Buckingham.The power loss due to tooth friction is proportional to this product and estimated at 1%. Thus denoting the power loss by ∆P12, we have, ∆P12 = | F12vE12| (0.01) = 0.01 | F12R2| |ω2 - ω3| (21). Although the potential power is not the actual power except for gears operating on fixedcenters, It corresponds to the power which would be transmitted by the same gear pair operatingon fixed centers at angular velocities (ω1 - ω3) for gear 1 and (ω2 - ω3) for gear 2. The actualpitch-line velocity of the gear mesh of Figure 19 is ( - R2 ω2). Hence the ratio, µ, of potentialpower to actual power is given by:
(22). In high-reduction planetary gearing the velocity of the output gear (or an intermediate gear)can be substantially less than that of the associated arm, i.e. ω3/ω2 »1. In such a case thepotential power can be much larger than the actual power. The frictional losses will then be muchgreater than In a simple or compound gear train having the same reduction ratio. The example in the next paragraph illustrates the calculations involved.
4.3 Power Loss In A Planetary Spur Gear TrainWe consider once again the planetary gear train shown in Figures 9, 13, 14 and 15. Suppose the gears are 24 D.P. with the following number of teeth and pitch radii:
N1 = 36 corresponding to R1 = 0.750" N3. = 24 corresponding to R3' = 0.500" N3. = 27 corresponding to R3" = 0.5625" N4 = 33 corresponding to R4 = 0.6875".
Let the Input speed be 250 RPM counterclockwise and the input torque be 25 in-lbs.counterclockwise. In this case.
M2 = 25 in-lbs. ω2 = (250) (2π)/(60) = 26.18 rad/sec. R = R1 + R3' = 1.25 inches
F32 (Par. 2.5, eq. (ii)) = M2 = 25 = 20 lbs. R 1.25
F43 (Par. 2.5 eq (v)) = - M2R3' = (-)(25)(0.500) R(R3"-R3') (1.25)(0.5625-0.500) = - 160 lbs.For the mesh 1-3' the magnitude of the velocity of tooth engagement is given by the product ofthe pitch radius, R1, of the sun gear and angular velocity, ω2, of the arm: VE23' = R1 ω2 = (0.750) (26.18) = 19.64 in/sec.
T80

the potential power, ∆P13', of the mesh is given by ∆P13' = |F23' VE23'| = (20)(19.64) = 392.8 in-lb/sec. The frictional power loss at this mesh, therefore, is estimated at (0.01) (392.8) or 3.93in-lb/sec. For the mesh 3" - 4, F3"4 = 160 lbs.*
= - 5.95 rad/sec. |VE3"4| = R4 |ω4 - ω2 | = (0.6815)| - 5.95 - 26.18| = 22.09 in/sec.
Hence, the potential power, ∆P3"4, is given by: ∆P3"4 = | F3"4VE3"4| = (160) (22.09) = 3534 in-lb/sec.
Hence, the frictional power loss associated with this mesh is estimated at 1% of 3534 or 3534in-lb/sec.
Thus the total power loss of the system (neglecting friction in the pin Joints) is 3.9+35.34 =39.27 in-lb/sec. The input power, M2 ω2, is (25) (26.18) or 654.5 in-lb/sec. Hence, the efficiency,η, of the gear train is:
η = 654.5 - 39.27 654.5 = 94%
It is worth noting that the largest power loss occurs at the high-reduction mesh. The potential power at the 3"-4 mesh is 3534 in-lb/sec. This is more than five times thetransmitted power. In both instrument and power applications this can be significant, since itmay indicate a high rate of heat dissipation and wear. As a second example, let us consider the case in which N1 = 36, N3 = 24 as before, but N3" =25 and N4 = 35, corresponding to R3" = 0.5208" and R4 = 0.7292".
____________________*Strictly speaking F34 should be 1 % less than 160 lbs., due to the power loss in mesh 1-3. Inthis example, however, this difference is sufficiently small so that in this preliminary calculationwe shall neglect it. This same approximation will be made for the modified proportions whichfollow in the next example.
T81

In that case F32 = 20 lbs, as before and F43" = (-)(25)(0.500) (1.25) (0.0208) = - 480.76 lbs.
and VE3"4 = (0.7292) (- 1.87 - 26.18) = 20.45 in/sec. The power loss, ∆P13', at the 1-3' mesh is 3.93 in-lbs, as before. At the 3"-4 mesh the power loss, ∆P3"4, is P3"4 = (480.76) (20.45) = 9,831 in-lb/sec.Hence, the power loss at this mesh is 98.31 in-lb/sec. The total power loss, therefore, is 98.31 +3.93 = 102.24 in-lb/sec, corresponding to an efficiency of: η = 654.50 - 102.24 654.50 = 84.37.Thus increasing the reduction ratio from 4.4 to 14 has increased the power loss from 6% to15.6% i.e. by a factor of about 2.6. When a substantial amount of power is transmitted by the system this power loss wouldsignificantly increase the required input power. The gear train would need to be designed so asto be able to dissipate the heat generated at the 3"-4 mesh, as well as to tolerate the wear atthis mesh. The efficiency estimate of other planetary gear trains, including bevel gear differentials,follows along the same lines. For simple and compound gear trains (in which the gears operate on fixed centers), thepotential power is equal to the actual power at each mesh and the efficiency estimate can bemade more rapidly. While these estimates are adequate for preliminary design purposes, theyare not intended to replace prototype testing and eventual design refinement. The estimate canbe very useful, however, in the preliminary sizing of gears and pointing to potential troublespots, which can then be remedied in the design stage.
5.0 MINIMIZATiON OF GEAR TRAIN INERTIA(*)(*) (i)
(ii)
(iii)
(iv)
(v)
Black, T. "Designing low-inertia instrument drives", Product Eng'g. 50, Dec. 1979, pp.31-33.Burgess, E.G. "Minimization of gear train inertia", Trans. ASME 76B, J. Eng. Ind., 1954,pp. 493-496.Davis, S.A. and Ledgerwood, B.K. "Gearing", Section 13, Control Engineers Handbook,J.G. Truxal, Editor, McGraw-Hill, 1958.Peterson, D.P. "Predicting minimum-inertia power gear trains", Machine Design 26,June 1954, pp. 161-167.Stoner, T.A. and Sipek, G.B. "Design of power spur-gear trains for minimum inertia",ASME Paper 54-F-8, Sept. 1954.
T82

5.1 Introduction To Gear Train Inertia MinimizationThe minimization of gear train inertia is useful for the following purposes: * To obtain fastest response for a given Input torque, such as a motor torque. This is often desirable in instrument drives and control applications. * To minimize driving torque for a given system response.
In order to arrive at a minimum-Inertia design, certain assumptions are commonly made. Forinstrument trains it is often (but not always) assumed that all pinions are identical and ofminimum size consistent with avoiding undercut. For power applications, on the other hand,pinion size is governed principally by load and wear considerations. Despite these differences the derivations and results in both cases bear a strong similarity. Inthe following we describe the minimization of gear train inertia for instrument and controlapplications. The development which follows is based entirely on the fundamental work ofBurgess (see Ref. (ii) below), with the exception of the modifications needed for controllingbacklash. It will be found that the optimization for minimum gear train inertia is remarkablyeffective in the sense that output response is far more rapid than what might have been obtainedin the absence of optimization.
5.1.1. The Moment Of Inertia Of Rigid Bodies (a) Definition of Moment of Inertia Inertia may be regarded as a property of a body which resists a change in its state ofmotion. For example, if a gear rotates at constant speed about a fixed axis, the torque, T,required to accelerate the gear with a given angular acceleration, α, is proportional to itsmoment of inertia, I, about that axis: T= l α (i). Thus the moment of inertia is important in determining the torques and accelerations ofrotating systems such as gear trains. (b) Units and Formulas The moment of inertia, I, of a mass particle about a given axis is defined as the product of themass, m, of the particle and the square of its distance, d, from the axis. Such a moment ofinertia is called a mass moment of inertia. If the weight of the particle is W, then: I = md2 = Wd2 (ii), gwhere g is the gravitational constant. The units of inertia are in-lb-sec2. For gear-train calculations we often need the moment of inertia of rotating parts having a solidor hollow cylindrical cross-section. The moment of inertia about the axis of the cylinder, which isusually also the axis of rotation, is called a polar (mass) moment of inertia. For example, for a circular cylinder, radius a, and weight W, the polar moment of Inertia, ip, isgiven by: IP = Wa2 (iii). 2g For a cylindrical pipe, the outer and inner radii of which are a0 and ai, respectively, IP = w(a0
2 - ai2) (iv).
2g
T83

The moments of inertia of many rigid bodies about various axes has been tabulated inengineering handbooks.
(C) Equivalent Inertia In the case of geared systems we are often interested in the acceleration produced by a givenmotor torque. Since change ratios are involved at each gear mesh, the simple equation T = l α[eq. (i)] needs to be modified. The modified, more general equation can be expressed In theform: T = lequα (v),where T = motor torque α = angular acceleration at motor pinionand lequ = equivalent system Inertia as seen at motor pinion.
The equivalent system inertia is the sum of the effective Inertia of each moving component.The effective inertia of each moving component Is the product of its polar mass moment ofinertia (Including that of any integrally attached shafting) and the square of the speed ratio, R,,between It and the motor shaft. If the speed ratio. A,. is defined to be always greater than unity,the following rule applies: Rule for effective inertia computation: If the component (gear or pinion) rotates fasterthan the motor pinion, multiply its polar moment of inertia by Ri
2 lf the motor pinion rotatesfaster than the component divide Its polar moment of inertia by Ri
2.
For example, for the gear train shown in Figure 19a, which illustrates a three-mesh speed.reducer train, let
lm = motor Inertial1 = inertia of motor pinionl2 = inertia of gear 1 and pinion 2l3 = inertia of gear 2 and pinion 3l4 = inertia of gear 3lL = load inertia.
It is assumed that the inertia of associatedshafting has been included.
Figure 19a Three-Mesh Reducing Gear Train
T84

Let NGi, NPi (i = 1, 2, 3) denote the number of teeth of the jth gear and pinion, respectively (NGi> NPi). Also let mi = NGi/NPi = reduction ratio of jth meshand ω1 = speed of motor pinion ω2 = speed of gear 1 and pinion 2 ω3 = speed of gear 2 and pinion 3 ω4 = speed of gear 3 and loadThen (vi) ω2 = ω1/m1 ω3 = ω1/(m1 m2) ω4 = ω1/(m1 m2 m3)
The equivalent moment of inertia of the gear train as seen at the motor pinion is then given by: lequ = l1 + l2 + l3 + l4 (vii). m1
2 (m1m2)2 (m1m2m3)2
Imagine now that motor and load were interchanged so that the train functions as aspeed-increasing gear train. In this case: ω4 = angular velocity of motor and gear 3From eq (vi),
ω3 = ω4 m3 ω2 = ω4 m2 m3 ω1 = ω4 m1 m2 m3 (viii)
Hence, according to the rule given earlier in this paragraph, the equivalent moment of inertia,lequ at the motor pinion is now given by: lequ = l4 + l3 m3
2 + l2 (m2 m3)2 + (l1 + lL) (m1 m2 m3)2
= (m1m2m3)2 lequ + lm + lL (ix) (m1m2m3)2
Hence, excluding motor and load inertia the equivalent moment of inertia of the gear train hasincreased by the square of the overall speed-change ratio (m1 m2 m3) of the system. This shows the limitations resulting when a speed reducer is used as a speed increaser bysimply interchanging motor and load. It also follows that for any speed-increasing gear train, themoments of inertia at the high-speed end need to be minimized. Any fractional power loss will be magnified due to the higher speeds of the gears involved. inthe speed increasing arrangement, the stage, which had been the input stage, has now becomethe output stage. The load applied to this output stage of the speed increaser should not exceedthe design strength of the gears of that stage.
T85

5.2 The Single MeshIn Figure 20 a motor exerting a torque, Tm, and having a motor shaft of polar moment of inertia,Im, carries a pinion (polar moment of inertia lP) on the motor shaft. The pinion drives a gear(polar moment of inertial lG), the reduction ratio being R. The gear is directly coupled to a rotaryload of polar moment of inertia, lL. All moments of inertia are mass moments.
From eq. (i) of Par. 5.1.1, Tm = lequ am (i),where Tm = motor torque lequ = equivalent system inertia at motor pinionand am = angular acceleration of motor pinion.The angular acceleration, aL, of the load is given by: aL = am (ii) R According to eq. (vii) of Par. 5.1.1, lequ = (lm + lP) + (lG - lL) (iii).Substituting (ii) and (iii) Into (i), we have,
(23)Let lG = kR4lP (24) lP where k = Wg tg (25) WP tP
T86

Wg, WP, represent material densities (lbs/in3) of gear and pinion, respectively; and tg, tP their respective thicknesses.
The moments of inertia of gear and pinion are obtained by regarding each as a circular dischaving a radius equal to the pitch radius. It Is important to Include the inertia of any shaftingmoving Integrally with gear or pinion. Pinion shafts' may or may not contribute significantinertia, whereas gear shafts are often of sufficient size that their inertia Is not negligible. Substituting eq. (24) into eq. (23) and differentiating with respect to the reduction ratio, R, inorder to maximize output acceleration, aL, we find R = ROPT, where
In this case, therefore, the optimum reduction ratio can be readily determined.
Figure 20 Single-Mesh Gear TrainReprinted with the permission of The AmericanSociety of Mechanical Engineers; see Ref. 1
5.3 The Two-Mesh Gear Train (Figure 21)In this case we have two pinions (Inertia lP1,lP2) two gears (inertias lG1, lG2) and two reductionratios (r1, r2), as well as the motor (torque Tm, inertia lm) and load (inertia lL). Let the overall reduction ratio be R: R = r1r2 (27). The algebra in this case Is considerably longer than in the single-mesh case, but in theparticular case in which the overall reduction ratio, A, Is specified, all pinions have the sameInertia (lP1 = lP2 = lP) and constant k (eq. (25)) is the same for both meshes, the optimumfirst-stage reduction ratio, r1, is obtainable from the following cubic equation in r12:
When the pinion inertias are not equal and the overall reduction ratio is not specified, theequations become complicated and the method described in the next paragraph for the generalcase is recommended.
T87

Figure 21 Two-Mesh Gear TrainReprinted with the permission of The American
Society of Mechanical Engineers; see Ref. 1
5.4 The General Case (n-Mesh Train)In this case an explicit algebraic equation for the optimum reduction ratios is not available, butthe following recursion equation can be used:
where ri = reduction ratio of ith mesh ri+1 = reduction ratio of (i + 1)st mesh lpi = inertia of jth pinion (pinion of ith mesh) lP(i+1) = inertia of (i + 1)st pinion (pinion of (i + 1)st mesh) Ki = value of constant, k (eq. (25)) for ith mesh Ki+1 = value of constant, k (eq. (25)) for (i + 1)st mesh n = number of meshes in gear train.
The overall reduction ratio, R, is given by: R = r1 r2 r3.............. rn (30)
The method of solution is now as follows. A trial value is assumed for the first-stage reductionratio, r1. Recursion equation (29) is then used to calculate all the succeeding reduction ratios.These ratios are then substituted into eq. (30) to find the overall reduction ratio, A. If this valueis prescribed, the chances are that the value of A obtained from the initial trial value of r1 will notmatch the prescribed value of R. In that case r1 can be incremented in steps until the desiredR-value has been obtained. Such a one-parameter scanning procedure is an effective searchprocedure which can readily be computerized.
T88

5.5 Tradeoff Between Design For Minimum Backlash And Minimum InertiaFor minimum inertia it will be found that the first-stage reduction, r1, is fairly mild, averagingtypically between 1.5 and 2.5. For minimum backlash, however, it is desirable to maximize thefirst-stage reduction ratio. It can be shown that if the first-stage reduction, r1, is specified by backlash considerations,while the remaining reduction ratios are chosen so as to minimize gear train inertia, equation(29) remains applicable, the only change being that i ranges from 2 to n, rather than from 1 ton.
5.6 Inertia RatioThe angular acceleration, aL, of the load, corresponding to a given motor torque, Tm, is given by: aL = Tm (31) Rltm
where ltm denotes the equivalent system inertia seen at the motor shaft:
Hence, maximizing load acceleration is equivalent to minimizing the equivalent system inertia.Motor and load inertia can be assumed to be given, so that the optimization applies to all theterms in eq. (32) other than lm and lL Hence, it is reasonable to define an inertia ratio, Rj, as theratio of the equivalent system inertia excluding motor and load inertia, to the inertia of the motorpinion:
(33) The inertia ratio is a factor of merit for the inertia optimization of the gear train. Clearly it cannever be less Than unity. its value signifies that the equivelent system inertia at the motor shaftis the same as that of Rl motor pinions. The lower the value of the inertia ratio, the better theoptimization - and conversely.
5.7 Results Of The OptimizationFigures 22-26, which are reproduced from the paper by E.G. Burgess (Ref. (ii), par. 5.0)illustrate the results of the optimization for two cases: Case (i): k = 1: all pinions and gears of same material and thickness. Case (ii): k = 2/9: stainless steel pinions meshing with aluminum gears, 2/3 the thickness ofthe mating pinions. Figure 22 shows the ratio of the (i + 1)st mesh as a function of the ratio of the lth mesh, theformer plotted on logarithmic vertical scale. It is evident that the reduction ratio, ri+1, increasedfrom unity to 14 as ri increased from approximately 1.5 to 4.5. The curves for k = 1 and k = 2/9show the same general characteristics. One conclusion which follows from the figures is thatequal mesh reduction ratios are not optimal. Figures 23 and 24 show the drive motor mesh ratio, r1, as a function of the overall reductionratio, A, the latter shown on a logarithmic scale. Here we can observe a marked differencebetween one and two meshes; a significant difference between two and three meshes; and
T89

smaller and smaller differences as the mesh number increases. This shows the dominantinfluence of the first few meshes on the Inertia ratio. As the number of meshes increases it isseen the rate of increase of the motor mesh ratio becomes quite small-with four meshes themotor mesh ratio remains less than two. This is markedly in contrast to what one might haveconcluded from the fact that reflected inertia decreases as the square of the reduction ratio. Themildness of the optimum motor-mesh ratio takes into account not only the reduction ratio, butalso the size of the gears and pin ions of the train.
Figures 25 and 26 are probably the most significant. These show the inertia ratio, Rl, as afunction of the overall reduction ratio, R, of the optimized gear train. These figures demonstratethe effectiveness of the optimization. The single-mesh case corresponds to the case of nooptimization. At a reduction ratio of approximately six, the inertia ratio for k = 1 has reached thehighest value (35) on the ordinate scale of the figure. If this curve were extended to a reductionratio of 100, the inertia ratio would be huge. By way of contrast the two-mesh train reaches aninertia ratio of 35 only when A 80. And a four-mesh train reaches an inertia ratio of only aboutseven when k = 1. Analogous conclusions follow when k = 2/9. It can be shown (see Burgess)that provided the first-stage reduction is not less than 1.5 and the parameter k is the same forall meshes that the limiting value of the Inertia ratio for even an infinite number of meshesremains finite and approaches the value 2kr12. Hence, the optimization is extremely effective. In all five figures, we can detect a "law of diminishing returns": as the number of meshesincreases the optimization continues to improve, but the most rapid rate of improvement occursin the first few meshes.
Figure 22 Relation Between Successive Mesh Ratios In Minimum Inertia Train
Reprinted with the permission of The AmericanSociety of Mechanical Engineers; see Ref. I
T90

Of course any system optimization is a tradeoff amongst many criteria. These include not onlythe inertia ratio, but also backlash, number of moving parts, cost and other considerations. Theresults do show, however, that the optimization for inertia ratio is both effective and practical.
Figure 23 Motor Mesh Ratio For K = 1Reprinted with the permission 01 The American Society of Mechanical Engineers; see Ref. 1
Figure 24 Motor Mesh Ratio For K = 2/9Reprinted with the permission of The AmericanSociety of Mechanical Engineers; see Ref. 1
T91

In Ref. (i) of paragraph 5.0 the minimization of gear train inertia in instrument drives isdiscussed in an essentially similar manner. Analytical results are given for single-stage andtwo-stage gear and belt drives and the effectiveness of the results illustrated numerically.
Figure 25 Selection of Number of Gear Meshes for Minimum Inertia Train; K = 1Reprinted with the permission of The AmericanSociety of Mechanical Engineers; see Ref. 1
Figure 26 Selection of Number of Gear Meshes for Minimum Inertia Train; K = 219Reprinted with the permission of The AmericanSociety of Mechanical Engineers; see Ref. 1
T92

5.8 Power Gear TrainsThe minimization of power gear trains is described in references (iii, iv, v) of section 5.0. Theprinciple of the optimization remains the same, but the assumptions regarding pinion proportionsare based on load/wear and other considerations suitable for power gear trains. Recursionformulas relating the optimum values of the reduction ratios for the ith and (i + 1)st meshes areagain derived and the resulting optimization found to be effective in limiting the magnitude of theinertia ratio of the gear train.
6.0 GEAR TRAIN BACKLASH COMPUTATIONThe permissible AGMA backlash tolerances for fine-pitch gearing have been given in Table 1.9 inthe Section on GEARS. These values of deliberate reduction of tooth thickness provided duringmanufacture of the gears range from Backlash Designation A to E (the latter does not permit anyreduction in tooth thickness). Backlash calculations for a single mesh were discussed in paragraph 4.10 of the Section onGEARS. In particular eq. (24) showed the following relationship between angular backlash, aB,the equivalent linear backlash, Bi, measured along the pitch circle, and the pitch radius (Ri) ofthe gear as follows: aB(minutes) = 3440 Bi R (34) The accumulated angular backlash or lost motion of an entire gear train can then be obtainedby summing the individual angular backlashes multiplied by the gear ratio, νi, from the output(for example) to the mesh involved. This can be expressed as follows:
where aBm-3, for example, is the angular backlash for mesh (m - 3) and (m - 1) is the referenceshaft. This is usually a specific shaft, such as the slowest shaft - often this is also the outputshaft. The angular backlash can be obtained by dividing the linear backlash by the pitch radius of thegear involved. This leads to the following equation used by Paul Dean, Jr. of MechanicalTechnology lnc.*
where Ri denotes the pitch radius of the jth gear and backlash is given in minutes. A three-stage gear train Is shown in Figure 27. Starting at the motor end, there is an 8:1reduction in the first stage, a 4:1 reduction in the second stage and a 6:1 reduction in the thirdstage. Assume also that maximum backlash values are as given in the following table:
________________________*This equation and the example which follows is reproduced by permission of McGraw Hill BookCo. Inc. from "Lost Motion in Gear Trains" p. 236, "Gear Design and Application", New York, NY1967.
T93

Gear Number
Pitch Diameter
Backlash of Mesh
(Bi)Gear Ratio
Relative Shaft Speed
Bi Riγi
135
3.001.251.25
0.00150.00300.0030
6:14:18:1
1.0 6.0
24.0
0.00100.00080.0002
Then according to eq. (36) the backlash in the gear train at shaft #1 is given by:
Reprinted with the permission of McGraw Hill; see Ref. 2
7.0 TRANSMISSION ERROR IN GEAR TRAINS7.1 IntroductionThe fundamentals of transmission error for a single gear mesh has been described in paragraphs10.3 and 11.2-11.5 in the section on GEARS. Essentially the transmission error is the position error or "out-of-position" of a gear due to avariety of causes. These include profile errors, spacing errors, pitch-line runout, radial out-ofposition and others. In the following we consider transmission and backlash determination for anentire gear train. Representing a gear train by a three-dimensional pictorial sketch is tedious and costly. Moreoften trains are pictured in a two-dimensional stretch-out schematic, illustrated In Figure 28.This will be the gear train which we shall analyze for transmission error and backlash.
T94

Figure 28 Schematic Representation of a Gear Train
7.2 Gear Train Transmission Error ComputationIn a parallel procedure to that for determining backlash the total transmission error for a train iscalculated by determining the angular transmission error for each mesh per equation 50 given Inthe Section on GEARS. Then all meshes are summed, taking into account the gear ratio of eachstage. Thus:
where νi is as previously defined.
7.3 Integrated Position Error For A TrainCalculation of this criterion follows from an extension of equation 51 given in the section onGEARS. Gear train values of Bc and BT are substituted into the equation to yield a peak value ofIPE.
7.4 Statistics And Probabilistic DesignThe procedures mentioned previously yield specific magnitudes of backlash and transmissionerror for particular values of error sources. However, they neglect cancellation effects of thesources and errors that depend upon mesh position and phasing. Thus, the procedures aresatisfactory for calculating worst-case or maximum error values such as when all contributingsources are at their extreme-tolerance values. Worst-case figures are of limited use since they represent improbable magnitudes andcombinations of error sources. Much more useful to designers are figures representing theexpected distribution of the gear train's backlash, transmission error, and IPE. By utilizing knownstatistical procedures and data it Is possible to derive reliable probabilistic statistical error values.These are very useful in optimizing a design for functional performance, tolerances, and cost.Unfortunately, the subject is beyond the scope of this presentation. It Is recommended thereader refer to Chapter 5 of Reference 5 given In the section on GEARS, which presents adetailed coverage of the theory of probabilistic statistical design and analysis along withapplication to gear trains.
T95

7.5 Example Of Backlash And Transmission-Error CalculationTo illustrate error analysis the following numerical example is presented. This is based upon thegear train schematic shown in Figure 28 and pertinent design data given in Table 1. The layout ofthe gear train, showing orientation of the line-of-centers (θ) is given in Figure 29. The twomeshes connecting the sensor to the load shaft have spring-loaded gears to eliminate allbacklash (see also paragraph on "Methods and Devices for Controlling Backlash"). It is required to calculate: a) the maximum backlash between the motor and load shafts,measured at S-1; b) the maximum transmission error between the load shaft and the sensorshaft S-8, measured at the load shaft S-1; and, c) the maximum integrated position error forpart b. Assume all gears are 20º pressure angle.a) Maximum backlash calculation (S1 to S6)
TABLE 1 DESIGN DETAILS OF PERTINENT PARAMETERSFOR THE GEAR TRAIN OF FIGURE 28
This is determined in accordance with equation 48 of Par. 11.1, section on GEARS, taking intoaccount all of the applicable backlash sources for each mesh.
T96

In regard to center distance variation, since it is specified by X-Y coordinates the orientationangle, θ, is significant. Center distance variation is related to the coordinate tolerance and angleθ by the expression:1 te = t (sin θ + cos θ)where: t = coordinate tolerance (± value) te = effective center distance tolerance-(± value)By this equation a maximum center distance opening can be determined for each mesh. Inaddition, any center distance allowance must be applied. Summing all the backlash sources for each mesh, the results are:Mesh 1: (max) ∆ C = (center distance allowance) + (center distance tolerance) + (test radius allowance) + (test radius tolerance) + (TCE) + (bearing outer race runout) + (bearing inner race runout) + (bearing radial play) + (gear to shaft clearance) + (bearing to housing clearance) + (shaft runout)Substituting values from Table 1,
_______________1Derivations of this equation and cases of unequal coordinate tolerances are given on page 88 ofReference 5 in the Section on GEARS.
T97

In the above equation, many of the terms are doubled because the backlash source isapplicable to both gears or shafts of the mesh. A number of the backlash sources are halvedbecause the values stipulated in Table 1 are TlR (total indicator runout) values, and it is only onehalf the runout that causes a maximum backlash. The derived maximum increase in center distance Is converted to a linear backlash byequation 22 of par. 4.10 In section on GEARS, and to an angle value by equation 24 of Par. 4.10in section on GEARS. Thus, for Mesh 1, Bm-1 = (.00635) 2 tan 20º = (.00635) 2 (.364) = .0046 inchesand the angular backlash is, aBm-1 = 3440 - B = 3440 (.0046) = 21.6 arc minutes R .750 In a similar manner, meshes 2 thru 5 are calculated, and the summary of the results is:
max ∆ C B aB Angular Measure at Shaft No.Mesh 1Mesh 2Mesh 3Mesh 4Mesh 5
.00635
.00967
.00970
.00982
.00101
.0046 .00704.00706.00715.00736
21.638.738.952.458.4
S-1S-2S-3S-4S-5
The total backlash measured at shaft S-1 is given by equation 35 as: (maximum)aBtrain = 21.6 + 38.7 + 38.9 + 52.4 + 58.4 3 9 36 180 = 21.6 + 12.9 + 4.32 + 1.46 + .324 = 40.6 arc minutesThe effect of gear ratio reducing backlash error is clearly seen in this example. The first meshcontributes 53% of the backlash and successive meshes contribute progressively less. The 4thand 5th meshes contribute such a small portion that they can be neglected without seriouslyaffecting the answer. If the backlash at the motor is of interest it will be the same backlash figure multiplied by thegear train ratio between S-1 and S-6: aBtrain = 40.6 x 1440 = 974 degrees (at shaft S-6) 60b) Transmission error calculation (S-1 to S-8) Only meshes M-6 and M.7 enter into calculation of the error. The sources of transmission errorare ICE of the gears, runouts of the bearings and shafts, and effective runout of the shafts due tolooseness between the gear bores and the mounting diameter of the shaft. The error sources are summed for each mesh and converted to angular values per equation50 of Par. 11.2 in the section on GEARS as follows:
T98

Mesh 6 (max) ET = ± 1/2[(TCE) + (bearing inner race runout) + (gear bore to shaft clearance) + (shaft runout)]
In substituting values for the above, the last two error sources do not apply to the pinionshafts since they are Integral. Therefore: (max) ET = ± 1/2 [2(.0005) + 2(.0002) + (.0005) + (.0002)] = ± .00105 (max) aET = ET 3440 = ± .00105 3440 = ± 6.42 arc minutes R 1.125/2 Mesh 7 This mesh is the same design as Mesh 6 and therefore the same linear ET results. Only theangular transmission errors differ due to different pitch diameter gears on shafts S-7 and S-8.Thus, (max) aET = ± .00105 3440 = ± 5.14 arc minutes 1.406/2 Total transmission error from the sensor to the load shaft is calculated per equation 37 as:
= ± 8.13 arc minutes; measured at S-1 C) Integrated Position Error (S-1 to S-8) This is a combination of the transmission error and backlash for meshes M-6 and M-7, perequation 51. Since mesh M-6 is spring-loaded to eliminate all backlash, only the backlash ofmesh 7 need be integrated. However, just the constant backlash sources are to be considered.Thus, for mesh 7 ∆ C = (center distance allowance) + (center distance tolerance) + (test radius allowance) + (test radius tolerance) + (bearing outer race runout) (bearing radial play) + (bearing to housing clearance)Substituting values from Table 1 ∆ C = .0002 + 2 (.0005) + 2 (.0005) + 2 (.0012) + 2(.0002 + .0005)/2 + 2(.0002 + .0003)/2 = .0058 inch
T99

Converting this radial opening of the gear centers to a linear backlash measure by equation 22 B = (.0058) 2 tan 20º = (.0058)(.728) .0042 inchand the angular backlash is Bc = .0042 3440 = 20.5 arc minutes 1.406/2 From equation 51 the integrated position error from the load shaft S-1 to the sensor S-8measured at S-1 is:
Substituting the above Bc value, modified by the gear ratio to S-1, and the transmission errorfound in par. (b) E1 = ± 8.13 + 1 20.5 = ± 11.5 arc minutes measured at S-1 2 3 The above values are maxima and represent the worst possible results necessitating all errorsources to be at their extreme tolerance values. In practice the realistic distribution of parametertolerances will result in a distribution of backlash, transmission error, and IPE that ranges farbelow the desired maximum values. This is typified by Figure 30. Usually mean values will be buta fraction of the maximums. Details of how to derive statistical distributions of gear trainbacklash, transmission error, and IPE are given in Reference 5 in the section on GEARS.
Figure 30 Statistical Distribution of Gear Train Backlash, Transmission Error orIntegrated Position Error__________*Given in section on GEARS
T100

B. CONFIGURATIONS AND DESIGNS8.0 INTRODUCTION
8.1 General Description of This SectionWe manufacture and design gears as well as complete speed-reduction systems. We assume thatnot all readers will be interested in selecting an available ready-to-use speed reducer. Some maywish to design their own special gear train or speed reducer and use components available fromstock. For this reason we shall not limit ourselves to the discussion of available speed reducers. Weshall also describe designs and configurations which can be custom designed by the use ofgenerally available standard parts. Gears may be arranged in a variety of ways to produce desired speed changes. Becausemotors are most efficient at high speeds, they are usually geared down for driving servos andother slower-speed devices. The packaged gear drive, Figure 31, saves the user the trouble ofdesigning and building his own speed reducer, or speed increaser, as the case may be. Becausethe user may have specific space, speed-ratio and shaft-orientation requirements, speedreducers are made in a range of gear types, shaft orientations, reduction ratios and overall sizes.Speed reducers are available with single or dual output shafts, in line (Figure 31) or at rightangles (Figure 32).
A special type of speed reducer, known as a gearhead, usually has a cylindrical housing (Figure33). The gear train within the housing is arranged so as to provide in-line input and outputshafts. Gearheads can be attached or coupled to most types of servo motors, but they
file:///C|/A1/SDP/D220/HTML/D220T101.htm (1 of 2) [11/14/2000 10:27:14 AM]

are not usually recommended as speed increasers, because the torque needed to turn the gearsfrom the output shaft is too high for most servo motors or mechanisms. The reason for this isgiven In paragraph 5 dealing with inertia (see Basic Concepts).
Figure 33 Gearhead in a Cylindrical Housing Suitable for Direct Assembly to a Motor
8.2 Precision Gearheads and Speed ReducersPrecision type modular gearheads are designed for use in high-accuracy computers, servosystems and similar precision devices. All gears are precision cut. The output gear and all stagepinions are made of hardened 416 stainless steel. All stage gears are made of aluminum bronze,due to its excellent wear-in properties. Ball bearings are made of stainless steel.Housings are black-anodized aluminum alloy and are precision bored for exacting centerdistances. The postless one-piece rigid construction eliminates the possibility of misaligned platesand cancels the need for cumbersome internal hardware. The cantilever design combined withwide bearing spans results in extremely low backlash. These units meet all requirements ofMlL-E-5272. The gearhead is attached easily and securely to the BuOrd frame size servo motor withoutmodifications of the input pinion and without complicated adapters, screw threads, etc. by theversatile mounting clamp supplied (see Figure 33). This method simplifies the replacement ofdamaged motors and interchangeability among similar units. Mounting dimensions are directlyIdentical to BuOrd OP 1755 motor dimensions. The basic gearhead design is adapted to the double-ended speed reducers. The transition isaccomplished by removing the motor and inserting the speed reducer input assembly using thesame clamp to hold it securely and accurately in position. Either input or output end can bemounted in position since dimensions on both ends are Identical. The single-end speed reducer (Figure 33a) is a compact reduction system whose Input andoutput shafts are coaxially extended from the mounting end, enabling the design engineer toinsert a large reduction at any location In the gear train with minimum space and backlashrequirements.
T102

Figure 33a (Single-end) Speed Reducer
For further information on our zero-backlash gearheads and speed reducers, the reader isreferred to paragraph 12.2(g).
9.0 BASIC CLASSIFICATION OF SPEED REDUCERS
9.1 GeneralSpeed reducers and gear trains can be classified according to gear type as well as relativeposition of Input and output shafts. Of course there are also hybrid types (which use more thanone kind of gear) and unusual configurations.
9.2 Shaft ConfigurationsSpeed-reducer configurations available from stock come in a variety of shaft arrangements.These are summarized in Figure 34.
T103
Catalog D220

9.3 Gear Types Figure 34 Speed Reducer ConfigurationsFigure 35 lists different types of gears used in speed reducers. Such gears are manufactured andmarketed by us and are available as standard catalog items. Together with the variety of shaftarrangements shown in Figure 34, this permits the user to assemble gear trains tailored to awide range of application requirements.
Figure 35 Gear Types Used in Speed Reducers
Table 2 presents an overview of the respective advantages and applications of different geartypes.
Catalog D220

TABLE 2 SUMMARY AND EVALUATION OF GEAR TYPES
Type PrecisionRating Features Applications Comments
Regarding PrecisionSpur excellent Parallel shafting
High speeds and loads Highest efficiency
Applicable to all types oftrains and a wide range of
velocity ratios.
Simplest tooth elements offering maximum precision. First choice.recommended for all gear meshes, except where very high speedsand loads or special features of other types, such as right-angle
drive, cannot be avoided.Helical good Parallel shafting Very
high speeds and loadsEfficiency slightly less
than spur mesh
Most applicable to highspeeds and loads; also
used wherever spurs areused.
Equivalent quality to spurs except for complication of helix angle.Recommended for all high-speed and high-load meshes. Axial
thrust component must be accommodated.
Crossedhelical
poor Skewed shafting Pointcontact
High slidingLow speedsLight loads
Relatively low velocityratio; low speeds and
light loads only,Any angle skew shafts.
To be avoided for precision meshes. Point contact limits capacitysod precision. Suitable for right-angle drives if light load. A lessexpensive substitute for bevel gears. Good lubrication essential
because of point contact and high sliding action.
Internalspur
fair Parallel shaftsHigh speedsHigh loads
Internal drives requiringhigh speeds and high
loads; offers low slidingand high stress loading;
good forhigh capacity, long
life. Used in planetarygears to
produce largereduction ratios.
Not recommended for precision meshes because of design,fabrication, and Inspection limitations. Should only be used when
internal feature is necessary.
Bevel fair to good intersecting shafts Highspeeds High loads
Suitable for 1:1 andhigher velocity ratios andfor right-angle meshes
(and other angles)
Good choice for right-angle drive, particularly low ratios, However,complicated tooth form and
fabrication limits achievement of precision. Should be located atone of the less critical meshes of the train.
Wormmesh
fair togood
Right-angle skew shafts High velocity
ratio High speeds and loads
Low efficiencyMost designsnonreversible
High velocity ratioAngular meshes
High loads
Worm can be made to high precision, but worm gear has inherent limitations. To be considered
for average precision meshes, but can be of highprecision with care. Best choice for combination high velocity ratio
and right-angle drive. Highsliding requires excellent lubrication.
Specials (face,
Spiroid.Helicon,Beveloid)
poor to fair Intersecting andSkew shafts
Modest speedsand loads
Special cases To be avoided as precision meshes. Significant nonconjugate action with departure from nominal center distance and shaft angles. Fabrication requires special equipment and
inspection is limited.
T105
Catalog D220

9.4 Speed Reducer Selection and DesignThe selection and/or design of a speed reducer involves two basic decisions: the choice of therelative orientation of input and output shafts and the nature of the gearing which is to achievethe desired speed change and transmit the desired torque with maximum efficiency. We now discuss the characteristics of speed reducers in greater detail.
10.0 PARALLEL-SHAFT ARRANGEMENTS
10.1 General Kinematic Characteristics (See also Part A: Basic Concepts)
10.1.1 Simple Gear Trains The most common element of a gear train is the gear pairconnecting parallel shafts (Figures 1, 2, Par. 1.2, Part A: Basic Concepts). The teeth for this typeof arrangement can be spur, helical or herringbone. The angular velocity ratio, Z21, is simply theinverse of the tooth ratio: Z21 = ω2 = ± N1 (38) ω1 N2 where ω1 is the angular velocity of gear i, which has Ni teeth (i = 1,2). The minus sign applies forexternal gearing (gear and pinion rotate in opposite directions), while the plus sign applies forinternal gearing (gear and pinion rotate In same direction). Adding one or more idler gears between input and output shafts (Figure 5, Par. 1.3, Part A:Basic Concepts) does not affect the final velocity ratio. For a simple gear train the angularvelocity ratio is numerically equal to the inverse of the ratio of the number of teeth of the gearson the input and output shafts. Idler gears are used to extend the distance between input andoutput shafts and/or to change their relative direction of rotation. The main limitation of a simple gear train is that its maximum speed-change ratio (velocityratio) is about 10:1, even when helical gears are used In place of spur gears. For larger velocityratios, the size of the last gear in the train, and hence the overall size of the train, becomes toolarge. This is undesirable, not only from the point of view of space limitation, but also from therealization that strength and wear capacities between the end gears become unbalanced,resulting in an inefficient use of material.
10.1.2 Compound Gear Trains In order to obtain larger velocity ratios economically it is oftenadvantageous to use compound arrangements (Figure 36). The double reduction shown in Figure36a is simply two single-reduction trains In series, with two of the gears keyed to a single shaft.The velocity ratio, Z14, is given by:
For a triple-reduction train, the angular velocity ratio, Z16, is given by:
and so fourth. By choosing equal center distances for gears and pinions, a double-reduction train can bearranged to have its Input and output shafts in line (Figure 36b).
T106
Catalog D220

Figure 36 Gear Trains
10.2 Efficiency of Gears Connecting Parallel ShaftsAs described in Par. 4.2 of Part A: Basic Concepts, the efficiency of a gear train can bedetermined from the power loss in each gear mesh. For preliminary design purposes thefrictional losses in each mesh were estimated at a fixed percentage of the potential powertransmitted through the mesh. A more refined estimate of this percentage, than given in Section4.2, will now be described. It should be kept in mind, however, that the power loss in gearing isdue to several sources: windage, churning and tooth friction. The following concerns only toothfriction, which is generally the most important in the preliminary design stage. The power loss due to tooth friction results from the sliding velocity between contacting gearteeth and the forces transmitted by tooth contact. As described by E.E. Shipley**, the efficiencyin spur and helical gear pairs can be estimated from the following equations: E = 100 - P (41)
________________**(i) "Efficiency of Gears", Gear Handbook, D.W. Dudley, Editor, McGraw-Hill, New York, N.Y., 1962, Chapter 14. (ii) "Efficiency of Gear Trains", "Gear Design and Application", N. Chironis, Editor, McGraw-Hill, New York, N.Y., 1967, pp. 244-245.
T107
Catalog D220

The notation is as follows: E = percentage efficiency of gear mesh f = coefficient of friction (average) Z = magnitude of gear ratio, greater than one P = power loss of gear mesh, percent of input power Rp, rp = pitch radii of gear and pinion, respectively Ro, ro = outside radii of gear and pinion, respectively θ = pressure angleThe terms F and Z are explained in the following table.
TABLE 3 DEFINITION OF TERMS F AND Z
Type of Gear F Sign of Z-term ineqs. (43,44)
External spur cos θ PlusInternal spur cos θ Minus
Single helical
cos φn/cos²ψ,where tanφ = tanθ cosψ,andψ = helix angle
Plus
For gears in which the addendum is the reciprocal of the diametral pitch, HS and Ht can besimplified as follows:
where NG, NP denote number of teeth of gear and pinion, respectively.
10.3 Numerical ExampleConsider the power loss in a pair of gears connecting parallel shafts with a gear ratio of 8:1. Thegears are 24 diametral pitch, 14½º pressure angle and unlubricated. The pinion pitch diameter is1 inch and a coefficient of friction of 0.1 can be assumed. Determine the numerical value of thepower loss in the following three cases: (a) The gears are externally meshing spur gears (b) The gears are internally meshing spur gears (C) The gears are helical gears with a helix angle of 15º.
Case (a): External spur gears Gear pitch diameter = 8.000" Pinion pitch diameter = 1.000"
T108
Catalog D220

Hence, RP = 4.000" rp = 0.500" Ro = RP + 1/Pd , where Pd = diametral pitch = 24 = 4.0417" ro = rP + 1/Pd= 0.5417"In addition, NG = (8)(24) = 192 NP = (1)(24) = 24 Z = 8,f = 0.1 and F = cosφ = cos14½º.
Substituting these values into eqs. (43,44) or (45,46), we find: HS = 0.349 and Ht = 0.265.This gives P = 1.617 and E = 98.38. Hence 1.62% of input power is lost In the mesh.
Case (b): Internal spur gears In this case the only change Is the sign of the Z-terms (Table 3). The terms HS and Ht arereduced by the factor (Z - 1)/(Z + 1), so that the power loss is 7/9 or 78% of the loss for theexternal mesh, i.e. P = (7/9)(1.617) = 1.258, giving E = 98.74%. The power loss in this case is about 1¼% of input power. The result confirms the well knownfact that the sliding velocities in internal gears are less than in external gears and hence, that theefficiency of internal gears Is greater. On the other hand, the generation of internal gear teeth ismore expensive.
Case (C): Helical gears In this caseψ = 15º.From Table 3, tanφn = tan 14½º cos15º and φn= 14.026º.This gives F(seeTable3) = cosφn/cos²ψ = 1.0398. Hence the calculation follows Case (a), except that the power loss, P, is reduced by the ratioof the F functions for the two cases, i.e. by the ratio (O.9682/1.0398) or 0.9311.This gives P = (1.617)(0.9311) = 1.506so thatE = 100 - P = 98.49% This corresponds to a power loss of about 1½% of input power. The helical gears thus tend tobe a little more efficient than the corresponding spur gears. Helical gears are also more quiet andthese factors can be significant In the selection of gear type.
T109
Catalog D220

Tables and charts for estimating the coefficients of friction of the various gear types can befound in Chapter 14, by E.E. Shipley, in the Gear Handbook cited in Par. 10.2 The power loss in an entire gear train can be obtained from the power loss in each mesh asdescribed in the next paragraph.
10.4 Efficiency of Gear TrainsThe overall efficiency, Et, of a simple gear train or a compound gear train without power dividingbranches is simply the product of the efficiencies (Ei, i = 1, 2, . . .) of the individual gearmeshes: Et = E1 E2 E3. . . . . . . . . (47) Thus, if the efficiency of a typical 6:1 gear mesh is 0.96, and it is desired to use a four-stagecompound gear train (without power branching) to obtain a speed reduction of (6) (6) (6) (6) =1296:1, the overall efficiency of the gear train is (0.96)4 = 0.85. The power loss, therefore, willbe 0.15 or 15%. if, as in Figure 18 (Section 3.3, Part A: Basic Concepts), a compound train with powerbranching is involved, each branch can be treated separately. For planetary gear trains the procedure outlined in Par. 4.3 (Part A: Basic Concepts) can beused. The power loss in each mesh can be taken as a fixed percentage of the potential powertransmitted through the mesh. In Par. 4.3 the same percentage was used for each mesh. A moreaccurate estimate can be obtained by using the efficiency equations given in the precedingparagraph to determine the efficiency of each mesh. In a planetary gear mesh, the gear ratio, Z,for eqs. (43,44), should be computed from the equation:
In eq. (48), ω1, ω2 denote the angular velocities of the gears and ω3 of the arm. As described in Par. 4.3 (Part A: Basic Concepts), the percentage loss is converted to anactual power loss by multiplying by the potential power, rather than the actual power. Multiple-reduction gear trains are frequently limited as to the number of reductions that maybe used effectively, because of the gear-mesh losses. In planetary trains both the number ofmeshes and the nature of the gear arrangement of the train influences efficiency. The efficiencyis therefore an important parameter in the design and selection of a speed reducer and/or geartrain.
11.0 CENTER-DISTANCE AND SPEED-RATIO ADJUSTMENTS USING PARALLEL HELICALGEARS
11.1 IntroductionHelical gears can be used: (1) To compensate for center-distance errors (for example when two shafts are erroneously machined too far apart), without changing the speed ratio between the input and output shafts. (2) To change the speed ratio between the input and output shafts without changing the center-to-center distance between shafts
______________* "When helical gears get you out of tight spots", by S. Rappaport, "Gear Design andApplication", N. Chironis, Editor, McGraw-Hill, New York, N.Y. 1967, pp. 79-82. Permission byMcGraw-Hill to reprint portions of this article is hereby gratefully acknowledged.
T110
Catalog D220

In both cases, varying the helix angle Is the key to the solution, according to a designapproach developed by S. Rappaport*. The pitch diameter of a helical gear (of given pitch) is notrelated in a simple linear proportion to the number of teeth, as is the case with spur gears, but isdependent also on the helix angle. Since for a given number teeth and pitch, the pitch diameterdetermines the resulting gear ratio, an infinite number of workable pitch diameters is possiblewithin a certain range, with a helical gear, Figure 37.
Figure 37 Development of Helical Gears from Spur GearsReprinted with the permission of McGraw-Hill, Inc.: See Ref 3.
The pitch diameter, D, of a spur gear, is simply, D = N (49), Pd where N is the number of teeth and Pd the diametral pitch. For a helical gear, the pitch diameter is computed from the equation: D = N (50), Pd Cos ψwhere p is the helix angle. From the above equation, it can be seen that the smallest pitchdiameter for a given number of teeth and diametral pitch occurs when cos ψ is at its maximumvalue of 1, i.e. when ψ = 0 (which makes the gear a spur gear).
11.2 Compensating for Center-Distance VariationWhen two shaft centers are erroneously machined too far apart, the error can be compensatedby replacing spur gears with helical gears. The required helix angle, p, is then found from cos ψ = C/Ca (51),where C is the design center distance and Ca the actual center distance. An incorrect center distance can sometimes be compensated for when it is smaller than thetheoretical center distance. Suppose two parallel shafts are to be connected by a pair of gearshaving 60 and 90 teeth, respectively, and a diametral pitch of 24. The pitch diameters of thegears are 60/24 = 2.5 inches and 90124 = 3.75 inches, respectively. The correct center distanceis ½(2.5 + 3.75) = 3.125 inches. Suppose, however, that this distance is incorrectly machined to3.012 inches. Spur gears cannot be used, because the next smaller spur-gear pair of the sameratio will have 56 and 84 teeth, respectively, with a corresponding center distance of 2.917inches. However, helical gears with 56 and 84 teeth can operate at a center distance of 3.012inches, provided that their helix angle equals:*See Reference 3.
T111
Catalog D220

cos ψ = 2.917/3.012 or ψ = 14.43 degrees. One of the helical gears will be left-handed and the other right-handed.
11.3 Changing Gear RatiosHelical gears can permit a change in gear ratio between two parallel shafts, while maintaining aconstant center distance. This problem sometimes occurs when a product or drive is beingredesigned. Assume, for example, that two shafts are connected by a pair of spur gears with diametralpitch 12 and with 30 and 75 teeth, respectively. The correct center distance for the shafts is4.375 Inches. It is now desired to change the ratio from 1:2.5 to 1:3.25. This necessitates a change in thenumber of teeth. Dividing (30 + 75) by (1 + 3.25) gives 24.705. Therefore, the pinion is selectedto have 24 teeth. The number of teeth for the gear Is (24)(3.25) = 78. But spur gears of 24 and 78 teeth call for a center distance of 4.250 inches, rather than therequired 4.375 inches. This problem is solved by using a helical gear set with 24 and 78 teeth,respectively, and with a helix angle, ψ, given by
cos ψ = C/Ca = 4.250/4.375giving ψ = 13.7 degrees.
It should be kept in mind, however, that in contrast to spur gears, helical gears impose boththrust and radial loads on their shaft bearings. The bearings, therefore, need to be designed tosupport both loads (see Figure 1.30 Section 1: Gears). When large helical angles and/or highloads are involved, herringbone gears or double helicals with opposite hands can be considered inorder to minimize thrust loading. For more information on bearing loads the reader is referred tothe literature cited at the end of Section 1 (GEARS).
12.0 METHODS AND DEVICES FOR CONTROLLING BACKLASH IN PARALLEL-SHAFTDRIVES
12.1 IntroductionIn many gear drives backlash needs to be minimized. This may be desirable for providingmaximum positional accuracy in high-precision applications, particularly when motion reversalcan take place. In addition backlash may be minimized to provide accurate timing and indexing.In power trains, as well as generally, backlash minimization may be needed in order to reducevibrations and transients during motion reversal, startup, stopping, and speed changing. One way to minimize backlash is by precision manufacture combined with rigidity of parts.Other designs have been reported for minimizing or eliminating backlash by the addition of parts,which provide a spring-loading action for taking up backlash. The following provides a selectionof representative anti-backlash designs.
T112
Catalog D220

12.2 Gear Design for Eliminating or Minimizing Backlash*
Figure 38 Adjustable Center Helps Shift Center Distance of Gear in Relation to ItsMating Gear
Reprinted with the permission of J. Wiley and Sons: See Ref. 4
(a) Adjustable Centers, Figure 38.Backlash can be reduced and controlled by adjusting thecenter distance to provide an acceptable level of backlash. The feasibility of this methoddepends on the assembly design. Adjustable centers are most advantageous when only thelast mesh of a train is to be adjusted, which often occurs in a reduction train since thismesh has the greatest effect on total backlash. Obviously, adjusting centers for a series ofmeshes is cumbersome because of the interrelation of shafts. Although adjustable centers require more parts and increase assembly cost, they allowmore liberal tolerances on gear center locations and gear size, which offsets the additionalparts and increased assembly cost. Adjustable centers are particularly useful for nonspurmeshes, such as worms and crossed-helical gears, for which other techniques are notusable. However, there are several distinct disadvantages to adjustable centers. They require askilled assembler, for adjustments are in the order of 0.0005 to 0.001 in. Thus, there is ahigh reliance on the mechanic, who can either make or break the method. Furthermore,adjustable centers are subject to developing maladjustments, and in the field there is noassurance that the quality of readjustment will be comparable to that originally made.
_______________*For paragraphs 12.2 a, b, c, permission by J. Wiley and Sons to reproduce portions of pp.252-254, 262 of G.W. Michalec's "Precision Gearing: Theory and Practice," J. Wiley and Sons,New York, N.Y., 1966, is hereby gratefully acknowledged; for paragraphs 12.2 d, e, f, permissionby McGraw-Hill to reproduce portions of F.T. Gutmann's "18 ways to control backlash in gearing,"pp. 237-242, "Gear Design and Application," N. Chironis, Editor, McGraw-Hill Book Co., Inc., NewYork, N.Y., 1967, Is hereby gratefully acknowledged.
T113
Catalog D220

Figure 39 Spring-Loaded Split Gear
(a) has one gear half fixed to Its shaft, other half free to rotate.Variations of technique In (b) uses different type of spring.
Reprinted with the permission of J. Wiley and Sons: See Ref. 4
(b) Spring-Loaded Scissor Gears, Figure 39, is a very widely used technique for eliminating allbacklash, continuously and throughout the life of the device. The essential elements are twogear halves, that gives the appearance of a split gear. The two gear halves are forced toshift, relative to one another, by a spring force until the mating tooth space is entirely filled.This accounts for the word scissor in the name. Although the most common form is the typeshown in Figure 39a, there are variations centering around the design of the loading springand the size of the gear. Small diameter gears necessitate use of a compact C-type torsionspring that Is designed around the gear shaft, 39b. Spring-loaded gears offer the features of simplicity, standardization, interchangeability,and reliability. In particular, they are the only type of backlash control that eliminates allbacklash, both fixed and variable with rotation. Also, the spring loading continually adjuststhe take-up such that there is automatic compensation for wear or thermal dimensionalchanges. A particular advantage of spring-loaded gears is their availability as a stock item. Manystandard spur gears are also offered in a split spring-loaded version. and with the samewide selection of quality classes and materials. Thus, designs based upon standard stockgears can be readily changed to a spring-load anti-backlash design by substitutingequivalent spring-loaded gears.
T114
Catalog D220

Figure 40 Series-Connected Spilt GearsReprinted with the permission of J. Wiley and Sons: See Ref. 4
(C) Series-Connected Split Gears, Figure 40.A variation encountered in applying spring-loadedgears Is that of a simple train Involving more than two gears. If it is desired to eliminate allbacklash in an extended simple train, split gears are the answer. One full-face solid gear isused to drive a series of split gears of which only the last is spring-loaded. This onespring-loaded gear loads the entire train and eliminates backlash from all meshes. The splitgears in between the solid drive gear and end spring-loaded gears appear like normalspring-loaded gears except they do not have loading springs. A convenient and inexpensivesource for such gears is the stock spring-loaded gear with the springs removed.
Figure 41 Split Gear with Tooth-Width Adjustment
Reprinted with the permission of McGraw-Hill, Inc.: See Ref. 5
(d) Adjustable Tooth Width, Figure 41 controls backlash with a split gear that adjusts theeffective tooth width. The two halves are rotated with respect to one another, at assemblyof the gear train, until there is no appreciable backlash at point of tightest engagement.They are then fixed in their relative positions by screws. As with the adjustable-centermethod. This method eliminates backlash only at one point of tightest gear mesh andproportionately reduces backlash at the other points.
T115
Catalog D220

Figure 42 Floating-Center GearReprinted with the permission of McGraw-Hill, Inc.: See Ref. 5.
(e) Floating-Center Method, Figure 42 One gear center is stationary; the other, allowed tofloat or pivot. Spring force holds the gears in intimate contact, thereby completelyeliminating backlash. Applications Include gear-rolling inspection fixtures and worm-wheeldrives.
Figure 43a,b,c Dual Gear Train Arrangements for Eliminating Backlash(a) Mirror-Image Arrangement, (b) Dual-Motor Drive, (C) Spring-Loaded Dual Drive
Reprinted with the permission of McGraw-Hill, Inc: See Ref. 5
(f) Dual Gear Trains, Figure 43 Several dual-train arrangements have been used successfullyto eliminate backlash:
(i) Mirror-Image Construction, Figure 43a. In this construction two identical geartrains run against each other. There is no backlash at the output gear. Thearrangement (left) has eliminated backlash in radar antennas. A motor drives twocounter-rotating gears placed on input shafts of two clutches. Each clutch isassociated with one of the gear trains, and both trains terminate at the output"bull" gear. If one clutch Is energized, the associated gear train rotates the bullgear, say, clockwise. At the same time, the bull gear drives gear train associatedwith the second clutch backwards.
T116
Catalog D220

When the second clutch is engaged, the reverse happens. In this manner, both geartrains are always loaded toward the bull gear: the active gear train by the clutch, and thedriven one by friction In the gears and bearings, which is reflected at the bull gear as afairly high torque. Springs or other loading devices are not needed in this setup, but added torque from theinput motor is called for to overcome friction in the inactive but rotating gear train.Also,high tooth loads result at the pinions meshing with bull gear. Pinions driving the bullgear should be approximately, but not exactly, 180º apart. This will decrease side thrust onthe bull gear, but also put the two gear trains slightly out of phase to make the outputmotion free of excess toothiness.
(ii) Dual-Motor Drive, Figure 43b. This is a variation of mirror-image concept. The two motorsare controlled individually, and if one motor drives, say, counterclockwise, the clockwisemotor will be de-energized. However, it is necessary to insure that the de-energized motor,when driven through the gear train at high speed, does not act as generator and overloadthe entire arrangement. Whether to use the two motors and one clutch rather than onemotor and two clutches depends on components' cost.
(iii) Spring-Loaded Dual Train, Figure 43c. This avoids the need for clutches by usingspring-loaded gears. The drawing shows how the arrangement is used in a speed reducer,In this case with the aid of torsion springs.
Figure 44 Precision Zero-Backlash Gear Train(g) Zero Backlash Gearheads and Speed Reducers for Precision Drives, Figure 44. In many
electromechanical instruments, it is often necessary to use, as a component part of asystem, a gear train which contributes a minimum amount of backlash or lost motion to thesystem, in order to obtain maximum system accuracy. With this need in mind, a gear trainarrangement was designed which completely eliminates backlash and lost motion from theentire train. At the same time, this gear system allows unusually high torque loads at thegear train output without overriding the spring loading of the system. Figure 44 illustratesthe application of this zero-backlash system to a gearhead or speed reducer.
T117
Catalog D220

The standard gear train (A, B1, C1, D1, E) is identical to that which is found In our standardcatalog gearheads & speed reducers. Pinion & gear clusters B2 & C2, in the backlash eliminatinggear train, are duplicates of pinion & gear clusters B1 & C1, In the standard gear train. The pinionof pinion & gear cluster D2 is identical to the pinion of pinion & gear cluster D1 with the additionof the torsion spring retaining slot In the end of the D2 pinion. As per normal practice, the gear &pinion on the D1 cluster are fastened together via press fitting & staking. The gear on the D2cluster is a slip fit on the mounting diameter of the D2 pinion and is axially retained on themounting diameter by the torsion spring. Input pinion E and output gear A are common to bothhalves of the train. In assembling the gearhead to a servo motor or to the input pinion of a speed reducer, thegear of cluster D1 is restrained from rotation by Inserting a wedge of a soft material (ie:aluminum, nylon, etc.) through the access hole provided in the housing and Into a tooth space.The gear of cluster D2 is then rotated, In a direction which winds the torsion spring the desirednumber of teeth and restrained from rotating, using a second wedge through the second accesshole. Since all speed reducer input pinions and motor pinions have an odd number of teeth, It iseasier to install the motor pinion or Input pinion, if the D1 & D2 gears are held by the wedges Ina position where a tooth space on-one of the gears is opposite a tooth on the other gear. Oncethe pinion is meshed with the D1 & D2 gears and the pilot diameter of the motor or speedreducer Input is seated within the gearhead shell, the wedges are released, completing thezero-backlash path.13.0 RIGHT-ANGLE GEAR SYSTEMS
13.1 IntroductionThere are two general classifications of right-angle gear systems:
Offset types that have non-intersecting or skew axes (axes do not lie in acommon plane). This group includes crossed helical gears, worm gears,hypoid gears and proprietary gears, such as Cone Drive(i), Spiroid(ii) andHelicon(ii) gears.Coplanar types that have Intersecting axes. This group Includes bevel gears -straight bevel, Coniflex bevel(iii), Zerol bevel(iii) - as well as face gears andBeveloid(iv) gears.
13.2 General Kinematic CharacteristicsThe angular velocities Qf the basic right-angle gear meshes are as follows: Bevel gears (Figure 1.46, Par. 9.3, Section 1: GEARS) The angular velocity ratio Z21, is givenby the inverse tooth ratio of the gear pair: Z21 = ω2/ω1 = N1/N2 (52) In externally meshing bevel gears the angular velocity vector of one gear is directed towardsthe point of intersection of the shaft axes and the angular velocity vector of the other gear Isdirected away from that point. Crossed helical gears (Par. 5.9.2, Figure 1.30, Section 1: GEARS)
_______________(i) Registered trademark of Cone-Drive Gears Div., Michigan Tool Company.(ii) Registered trademark of Spiroid Division, Illinois Tool Works.(iii) Registered trademark of Gleason Works.(iv) Registered trademark of Vinco Corporation.
T118
Catalog D220

In this case the angular velocity ratio, Z21, is given by:
where y1,2, D1,2 denote the helix angles and pitch diameters of gears 1 and 2, respectively. Worm Gears (Par. 8.0-8.5 and Figure 1.39, Section 1: GEARS) The angular velocity ratio,Z21, of worm to gear is given by: Z21 = NG / NW (54)where NG denotes the number of teeth of the gear and NW the number of threads of the worm.
13.3 Efficiency of Bevel, Worm and Crossed Helical Gears
13.3.1 EffIciency of Bevel Gears According to E.E. Shipley*, eqs. (41-44) of Section 10.2remain applicable for bevel gears, provided the function, F, is defined according to Table4,.
TABLE 4 DEFINITION OF TERM F
Gear Type F Definition of SymbolsStraight bevel
gears
Spiral bevelgear
cos θn cos τ + cos γ
cos θn (cos τ + cos γ)cos ψ²
θn = normal pressure angle τ = pitch-cone angle of bevel
gears = (90º - γ) for a right.angle
drive;γ = pitch-cone angle of bevel
pinion = tan-1NP/NG for a right-angle drive and NP,
NG number of teeth of pinion and gear, respectively
(See Figure 1.46, Par. 9.4,Section 1:GEARS) ψ = spiral angle
________________*Chapter 14 ("Loaded Gears in Action"), Gear Handbook, D.W. Dudley, Editor, McGraw-Hill BookCo., Inc., New York, N.Y., 1962.
T119
Catalog D220

In applying eqs. (42,43) for HS and Ht the radii are defined as follows: rP = pitch radius of large end of bevel pinion rO = outside radius of large end of bevel pinion RP = pitch radius of large end of bevel gear RO = outside radius of large end of bevel gear. The efficiency of Zerol gears is comparable to that of straight bevel gears. The efficiency of spiral bevel gears is quite high. The relationship of the efficiency of spiralbevel gears to that of straight bevel gears is analogous to that of helical gears to spur gears.
13.3.2 Efficiency of Worm Gears (Right-Angle Drives) The efficiencies given by E.E. Shipley (seeRef. in Par. 13.3.1) and Merritt ("Gears" by H.E. Merritt, Sir Isaac Pitman and Sons, London,Third Edition, 1955) are shown In Table 5. For preliminary estimates the approximation cosφn =1 is frequently adequate. For the exact determination of φn for worm and bevel gears the readeris referred to the references cited at the end of Section 1: GEARS.
TABLE 5 EFFICIENCY OF WORM GEARS
DrivingMember
Exact Equationfor Efficiency
ApproximateEquation forEfficiency
Definition of Symbols
Worm
Gear
E1 = cosφn - f tan λ cosφn + f tan λ E2 = cosφn - f cot λ cosφn + f tan λ
E1 = tan λ tan (λ + η) E2 = tan (λ + η) tan λ
φn = normal pressure angle f = coefficient of friction η = friction angle = tan-1 f λ = lead angle of worm = L/πd, where L = lead of worm, d = pitch diameter of worm
According to the approximate equations given In Table 5, the system is self-locking when theworm gear is driving and λ = η. Substituting for A in the approximate efficiency equation whenthe worm is driving, we have E1 = tan η /tan2 η, which is approximately equal to one half forreasonably small values of angle η. This result leads to the commonly used guideline whichstates that any worm drive with an efficiency (E1) of less than 50% can be expected to beself-locking. The efficiency of any reversing worm drive, therefore, should be well in excess of50%.
13.3.3 Efficiency of Crossed Helical Gears We again quote the result of E.E. Shipley (seereference cited in Par. 13.3.1):
E = 100 (1 ± f tan ψ1) (55) (1 ± f tan ψd) where E = efficiency expressed in percent f = coefficient of friction ψd = magnitude of helix angle of driverand ψf= magnitude of helix angle of driven gear.
T120
Catalog D220

The signs to be used in eq. (55) are determined according to the following table:
TABLE 6 SIGNS TO BE USED IN EQ. (55)
Sign ofNumerator
Sign ofDenominator
Hand ofGear
ψd > ψf? ψd < ψf?
--+
+-+
sameOppositeOpposite
Makes no No Yes
difference Yes No
The efficiency is a maximum when the gears are of the same hand and ψd has a particularvalue (see Merritt, p.355). In both crossed helical and worm gearing there is far more sliding than in spur or bevelgearing. For this reason the efficiency of worm and crossed helical gears is much lower. Thisneeds to be kept in mind in determining power requirements and designing for adequate heatdissipation and minimum wear. The efficiency of a gear train which includes worm and/or crossed helical meshes can becomputed from the efficiencies of the Individual meshes. This calculation can proceed along thesame lines as outlined for parallel-shaft gearing in Par. 10.4.
13.4 Crossed-Axis Helical Gears (Figures 45a,b)-see also Par. 5.9 of Section 1: GEARSCrossed-axis helical gears are the simplest form of gearing for transmitting power from one shaftto another when the shafts are non-parallel and non-intersecting. They can be thought of asnon-enveloping worm gears (see Ref. 3 at end of Section 1: GEARS).
The action of crossed helical gears consists primarily of a screwing or wedging action. Pointcontact between mating teeth limits the load-carrying capacity of this type of gearing, but slightchanges in shaft angle and center distance do not affect the conjugate action. Mounting istherefore greatly simplified and such gears are used in speed reducers (Figure 45b) to provideright-angle drives and small speed reductions in ratios up to about 4:1. A variety of drivearrangements are shown in Figure 1.30, Par. 59, Section 1: GEARS.
T121
Catalog D220

14.0 GEAR SIZE AND RATIO ADJUSTMENT USING CROSSED HELICAL GEARS
The excellent adaptability of crossed helical gears permit them to overcome many difficulties inspeed-reducer design. The calculations related to such modifications are not difficult.
14.1 Adjustment of Gear Size While Maintaining Mesh RatioConsider, for example, a case in which a pair of crossed helical gears are used in a 1:1 rightangle drive, Figure 46a. Each gear is made with N = 60 teeth; diametral pitch, Pd = 10; helixangle, ψ = 45º Their pitch diameters can be computed from eq. (56):
T122
Catalog D220

Suppose that because of space problems, there is insufficient clearance between the upper,driven gear and a frame to accommodate the housing of the drive. Thus, it is desired to reducethe pitch diameter of the driven gear from 8.485 in. to under 6.0 in., while the 1:1 speed ratio,the center distance between shafts, and the diametral pitch are to be kept constant. Let us findthe helix angle and pitch diameters of the two gears. The basic relationships for crossed helical gears are: d = N (56) Pd cos ψ D = N (57) Pd sin ψ and C = ½ (d+D) (58),where D = pitch diameter of driving gear d = pitch diameter of driven (upper) gear Pd = diametral pitch = 10 C = center distance = 8.485 in. N = number of teeth on either gear ψ = helix angle of driven gear 90º- ψ = helix angle of driver. Combining the above three equations, we have:
Substituting the value for N from eq. (57) into eq. (59) gives: tan ψ = d (60). 2C - d Since d must be less than 6, select d = 5.9. This gives tan ψ = 5.9 = 0.533 (2)(8.485) -5.9 and ψ = 28.056º. From eq. (56), N = (5.9) (10 cos 28.056º) = 52.07 teeth. Since d need not be exactly equal to 5.9 in., N can safely be taken as 52 teeth. Using a helixangle of 28º and substituting in eq. (56), we have: d = 52 = 5.889 in. 10 cos 28ºand from eq. (58), the diameter, D, of the driving gear, will be d = 2C - d = (2)(8.485) - 5.889 = 11.081 in.
T123
Catalog D220

with a helix angle of (90º - ψ) = 90º - 28º = 62º The driving gear, too, will have 52 teeth. Thus, a seeming paradox is achieved by having two meshing helical gears of greatly differingsize (Figure 46b) produce a ratio of 1:1. One should not, however, make the driver the smallergear and the driven gear the larger one, because beyond a certain point the helix angle begins toexceed the friction angle and the gears would tend to lock.
14.2 Adjustment of Gear Ratio While Maintaining Center Distance
Crossed helical gears can also be used to change the gear ratio while keeping the shaft positionsof the crossed helical gears constant. Assuming, for example, that for a gear drive with the sameinitial 1:1 ratio (Figure 46a), it is desired to produce the ratios below without changing the centerdistance: Case l: 1:1.5 Case ll: 1:2.2 Case lll: 1:2.75 Using the analytical method described previously, the gears shown In Figures 46c, d, e willmeet those requirements.
15.0 METHODS AND DEVICES FOR CONTROLLING BACKLASH IN RIGHT-ANGLE DRIVES
15.1 Bevel Gear Backlash EliminatorSuch a device Is shown in Figure 47a. The drive utilizes a spring-loaded idler pinion to keep thebevel gear assembly tightly In mesh.
Figure 47 Controlling Backlash In Bevel and Worm GearsAccomplished with the aid of idler bevel pinion in (a) and adjustable spring-loaded worm in (b) Reprinted with the
permission of McGraw-Hill, Inc.: See Ret. 5
T124
Catalog D220

15.2 Hollow-Worm Drive (Figure 47b)This design is based on a hollow worm with clearance for the worm shaft. The shaft drives theworm with the aid of pinned collars and links, while the springs keep the worm tightly In meshwith the worm wheel. The worm is in effect floating and is not restricted by the couplings on bothends
16.0 DIFFERENTIALS (FIGURE 48)
Figure 48 Bevel-Gear Differential
16.1 Description of DifferentialDifferentials represent a unique class of planetary gear trains. They are devices with two degreesof freedom, i.e. for two inputs one resultant output is obtained. This feature makes thedifferential an essential component in servo systems, computing devices, torque distribution,torque-measuring devices, instruments, etc. The nomenclature used in describing the components of a differential is shown in Figure 48. Many designs exist, the most frequently used being bevel gear differentials, spur geardifferentials and internal-gear differentials. The kinematics, force analysis and power-flow Inbevel gear differentials has been described in Par. 1.8 and 2.6 in Part A: Basic Concepts. If we designate by θ1 and θ2 the input angles representing the angular displacements of thetwo end gears and bye θ3 the angular displacement of the spider shaft (usually the output), thenthe action of the differential can be expressed as: θ3 = ½(θ1 + θ2). (61) This equation states that the angular velocity of the spider shaft is the arithmetic mean of theangular velocities of the two end gears. When the end gears have the same speed the unitrotates together without relative motion. The differential action occurs when the velocities of thetwo end gears are not equal.
16.2 Precision DifferentialsMany different stock differentials are available, as well as special models which can be designedto satisfy individual customer requirements. In the selection of a differential for most computer applications, a number of factors need tobe considered. Generally, high accuracy, low backlash and inertia are of prime importance.Simplicity of component parts, permitting accurate cutting and assembly of gears, must beincorporated in these differentials. Backlash may be controlled by adjustment of the self-lockingnuts, which retain the two planetary gears.
T125
Catalog D220

Low breakaway torque Is another Important prerequisite. All gears are carefully cut to insureoptimum contact and smooth power transmission. In addition, ball bearings are used throughout. Long life and resistance to various environmental conditions is insured by the use of stainlesssteel for all parts in a precision differential. Ease of maintenance must be designed into these units. The hollow-shaft design may permitreplacement of the entire differential without disassembly of the remaining gearing. Backlash,due to wear, may be controlled by simple adjustments. The larger variety of types and available standard sizes provide the designer with a selectionfrom which he may choose to satisfy almost any requirement.
16.3 Applications of Differentials16.3.1 The Automotive Differential One of the popular uses of a differential is for the rearend of automobiles. When an automobile travels around a corner, its outer rear wheel travelsfurther and therefore faster than its Inner rear wheel. The spider cage of the differential, Figure49, splits the power input from the drive shaft between the rear wheels. The wheels can adjustto the radii of the turn, but their average angular velocity is that of the spider cage (see also"Fundamentals of Mechanical Design" by R.M. Phelan, McGraw-Hill Book Co., New York, N.Y.,1970, p.432).
Figure 49 Automotive Type Bevel Gear DifferentialReprinted with the permission of McGraw-Hill, Inc.: See Ref. 6
16.3.2 Phase-Changing Differentials Differentials can be used for changing the phasebetween input and output shafts. Suppose input and output are coupled through a bevel geardifferential with the arm or spider cage held fixed. Phase adjustment, even while the end gearsare moving, can then be achieved by rotating the spider cage in proportion to the desired phaseshift.
16.3.3 Differential Arrangement for Obtaining a Weighted Average of Two RotationsSuppose It is desired to obtain a relation between displacements, which is a modification of eq.(61), i.e.: uθ3 = ½ (vθ1 + wθ2) (62),where u, v, w are constants. This relationship can be realized mechanically by adding one gearmesh to each of the three shafts of the differential, the parameters u, v, w representing the gearratios.
T126
Catalog D220

16.3.4 Reversing Gear Train Obtained from Bevel Gear Differential A differential gearsystem can also be useful in a reversing gear train, Figure 50. The bevel pinions rotate inopposite directions at all times, driven by the Input. The Output shaft is engaged to either of thepinions by shifting the clutch to one side or the other. This reverses the output. Smoothness ofoperation depends on the type of clutch employed.
Figure 50 Reversing Bevel Gear TrainReprinted with the permission of McGraw-Hill, Inc.: See Ref. 6
17.0 WORM GEAR DRIVES
17.1 Worm Gears - GeneralThis is a form of gearing often used for connecting right-angle shafts to obtain high reductionratios in a compact arrangement. Worm gearing has a high load capacity, due in part to the linecontact between worm and gear - in contrast to the point contact of crossed helical gears. Thefundamentals of worm gears have been described in Par. 8.0-8.5 in Section 1: GEARS. The large sliding velocities between worm and gear require careful design to insure adequateload-carrying ability while minimizing wear. A cylindrical worm (Figures 1.39 and 1.40,Section 1: GEARS) is essentially equivalent to aV-type thread. Worms can also have more than one thread, for example, to obtain adequatepower when large leads are involved.Various right-handed and left-handed worm-gear arrangements are shown in Figure 51. Theangular velocity ratios and efficiencies of worm-gears have been described in Par. 13.2 and Par.13.3.2, respectively. As In helical and bevel gears both tangential and axial forces occur In wormgear meshes and the shaft bearings need to be designed accordingly. For further details on thelatter, the reader is referred to the references given at the end of Section 1: GEARS.
Figure 51 Worm-Gear Configurations
T127
Catalog D220

17.2 Worm Gear Speed Reducers and Drives*17.2.1 General The action between a worm and its meshing gear is a combination of sliding androlling, with sliding predominating in the higher reduction ratios. The teeth may or may not be ofinvolute form. Also, the pitch diameters of the worm and gear are not proportional to the speedreduction ratio; a compact set can provide a large reduction ratio and speed. To obtain a low coefficient of friction in sliding, dissimilar metals are normally selected.Because the enveloping member-worm or gear-is never completely formed during the generatingprocess, it Is usually made of the more plastic material so that it can be cold-worked to thecorrect form in use. Table 7 summarizes a number of worm gear drives, their characteristics, advantages andlimitations. Worms are often made with more than one wrap-around thread, commonly referredto as a start. With some sets (Type l-Table7) only point contact results between the worm andgear (more on that later). To obtain line contact, the worm sets can be made "single enveloping"In which either the gear wraps around the worm (this is the conventional way-Type ll), or theworm around the gear (Types lV and V). When it is the gear that wraps around the worm, itsteeth take on a throated appearance, but the gear itself may or may not have topping stock. Forexample, a gear made without topping is commonly referred to as a throated gear, while somegears are made with topping. When it is the worm that wraps around the gear, a less common type, it too takes on athroated configuration and Is frequently called an hourglass worm. Worm gear sets can also be made double-enveloping, so that both members wrap aroundeach other (Type VI). In such a case, the worm takes on the hourglass shape, and the gear thethroated shape. This latter system is sometimes referred to as an hourglass worm drive, but ascan be seen from Table7 there are other systems that use hourglass worms.
17.2.2 Types of Worm Drives The characteristic of each drive is first discussed, then relatedequations and design procedures are given in a separate section that follows.
(a) Cylindrical worm and spur-Type l It is not widely known that a standard single-start worm can mesh properly with a standardspur gear with the shafts at right angles to each other. This simple type of worm drive is findingapplications where a high load capacity IS not required. The straight worm has threads ofconstant form and lead along its length. It Is actually a helical gear, and as the thread form Is anInvolute helicoid, there will be true conjugate action in operations with a spur gear, or as is morefrequently the case, a helical gear. The contact is a point-contact between two curved surfaces, and so the angular relationshipbetween the two shafts Is not critical. Misalignment between the shafts merely shifts the contactpoint without affecting the nature of the contact, or the conjugate action. This characteristic canbe used with advantage in instruments and data transmission applications. For example, an axialshaft in the gear does not cause a responding rotation in the worm, as it does in most the othertypes.
(b) Standard-form worm drive-Type ll This is the most common type of worm gearing in use today. It has the same,straight-cylindrical worm as In Type l, but the worm In this case meshes with a throated gear.Thus, the worm from a standard worm drive can mesh properly with a spur or helical gear-a factfrequently debated. The contact between the threads of the worm and the teeth of the worm is a line contact.
__________*This paragraph is based entirely on excerpts from "Guide to Worm Gear Types" by E.K.Buckingham, "Gear Design and Application," N. Chironis, Editor, McGraw-Hill Book Co., Inc., NewYork, N.Y. 1967, pp. 69-77. Permission by McGraw-Hill to reproduce this material is herebygratefully acknowledged.
T128
Catalog D220

Reprinted with the permission of McGraw-Hill Inc.: See Ref. 7
Catalog D220

(C) Deep-tooth worm drive-Type lll This is similar to the conventional worm drive, Type ll, but with extra deep teeth and lowpressure angle (10-dog minimum). These modifications result In multiple contact, usually 8 to 12teeth, and high recess action. This eliminates the main disadvantage of the standard worm drive, Type ll, which is that It isdesigned to operate with the pitch line at the center of the thread depth. This provides only a fewteeth in contact (two to three teeth) and results in a conjugate action that is mostlyapproach-approximately 75% approach action and 25% recess action-which contributes to wearand noise. A full recess action Is preferable and can be achieved.
(d) Enveloping-worm and spur gear drive-Type lV This drive consists of an hourglass type of enveloping worm which drives a standard Involutespur or helical gear. Properly designed, this geometry makes an excellent indexing drive, but itdoes not seem to be very widely known. With an enveloping worm drive, there is no conjugate gear tooth action-although there isconjugate cam action-and hence no approach or recess. The worm is essentially a barrel cam,which pushes ahead the gear teeth as the worm rotates. The action may be compared to that ofa screw and nut, except that the screw and nut have area contact, and the enveloping worm andspur gear have line contact. All relative motion between the worm and gear is pure sliding,always in the same direction for one direction of rotation of the worm, which makes for excellentresistance to wear and simplifies lubrication.
(e) Wildhaber worm drive-Type V This drive was invented by Ernest Wlldhaber back in 1922, about the same time that heinvented his circular-arc helical gear drive, also referred to as the Novikov drive. The Wildhaber worm drive Is similar to the enveloping drive of Type lV, with the exceptionthat the tooth flanks of the gear are straight instead of involute. This gives a contact pattern thatis very similar to that of the enveloping worm drive, Type lV, which shows, incidentally, that theform of the tooth-involute, straight-sided, or circular arc-is of little importance in a singleenveloping drive. The main advantage of a Wildhaber worm is that one can obtain extremely high accuracy intooth spacing because the gear can be cut from a dividing head or indexing table-to within 0.25sec of arc accuracy. Also, the system permits more flexibility in design because no special hobsare required. A worm set with 63.9 DP is just as easy to make as one with 64 DP.
(f) Double enveloping worm drive-Type Vl This system is also known as the Hindley-worm drive and with certain modifications, as theCone-Drive. The latter is the proprietary name of the Cone-Drive Gears Division of Michigan ToolCo. As the name double enveloping implies, the worm and gear "wrap around" each other toproduce a drive with an hourglas worm and a throated gear-the only one of the six with thiscombination. Also all teeth are straight sided, with flanks tangent to a common circle in any axialplane. Although the Wildhaber and the double-enveloping drives have the same axial section andlook similar, the double-enveloping worm cannot be properly meshed with a Wildhaber gear.
18.0 LIMIT STOPS
18.1 IntroductionShaft limits stops are usually used in one of the following applications: 1. To protect other components against damage due to over-winding. 2. To determine range of operation of a mechanism.
T130
Catalog D220

3. in combination with slip clutches provide Intermittent relative motion of different shafts within the same mechanism.4. In combination with electrical contacts perform counting, stopping or recycling function as shown below.Different designs of multi-turn stops exist. The various types - including the most commonlyused which is available from stock - are described in more detail In the following paragraphs.
18.2 Stop-Washer Type Limit Stops (Figure 52)Stop-washer type limit stops have an angularly adjustable drive disk sub-assembly (1) fixed tothe shaft. A lobe of the drive disc protrudes and engages the extended lobe of a washer. Lobes ofa multitude of these washers (2) - which can freely rotate on the shaft - finally create a solidspiral. The last washer presses against a solid stop or a pivot arm (3) which in application #4above actuates the limit switches (4). Range can be changed by removal and addition ofwashers, or for fine adjustments by displacement of the twin drive lugs in the drive discsubassembly.
Figure 53 Screw-and-Traveling-Nut Type of Limit Stop
18.3 Screw-and-Traveling-Nut Type of Limit Stop (Figure 53)The screw and traveling nut type has, a fixed disc and stop sub-assembly pinned to the inputshaft (lead screw). The adjustable disc and stop sub-assembly is rotated along the thread to thedesired position and secured at that position via tightening of the jam locking disc. Theadjustable feature is accessed via removal of the dust cover (not shown).
18.4 Pin-And-Gear Type of Limit Stop (Figure 54)This usually involves two spur gears with an unequal number of teeth. One of the gears is keyedto the shaft the rotation of which is to be controlled. Two stop pins, one attached to each gear,are in contact In the position shown in Figure 54. In this position gear 1 can rotate onlycounterclockwise and gear 2 clockwise. After a certain rotation of the gears, the pins will engageonce again. Thus the rotations of the gears (and the shafts to which they are keyed) are limitedby these positions.
T131
Catalog D220

The number of turns between stops is principally a function of the number of teeth on eachgear. To a lesser, though not negligible extent, it is a function also of the location and geometryof the stop pins. Depending on these parameters, it is possible to obtain shaft motions rangingfrom a traction of one turn to many turns.
References:1. E.G. Burgess, "Minimization of Gear Train Inertia", American Society of Mechanical Engineers, Trans. ASME 76B, J. Eng., IND 1954, pp. 493-496.2. P. Dean. "Lost Motion in Gear Trains", Gear Design and Application, Chironis, NP., Editor, McGraw Hill Book Co. Inc., New York, NY 1967, p. 236.3. S. Rappaport, "When Helical Gears Get You Out of Tight Spots", Gear Design and Application, Chironis, NP., Editor, McGraw Hill Book Co. Inc., New York, NY 1967, pp. 79-82.4. G.W. Michalec, "Precision Gearing: Theory and Practice", J. Wiley and Sons, New York, NY 1966.5. F.T. Gutmann, "18 Ways to Control Backlash In Gearing", Gear Design and Applica- tion, Chironis, NP., Editor, McGraw Hill Book Co. Inc., New York, NY 1967, pp.237-2426. R.M. Phelan, "Fundamentals of Mechanical Design", McGraw Hill Book Co. Inc., New York, NY. 3rd edition 1970.7. E.K. Buckingham, "Guide to Worm Gear Types", Gear Design and Application, Chironis, N.P., Editor, McGraw Hill Book Co. Inc., New York, NY 1967, pp. 69-77.
T132
Catalog D220



![ojs.imeti.orgojs.imeti.org/download/IJETI_Template.docx · Web viewCam-controlled planetary gear trains (CCPGT) are planetary gear trains with cam pairs. Chironis [1] illustrated](https://static.fdocuments.in/doc/165x107/5e2a1bc323cb0d0fbc4238a1/ojsimeti-web-view-cam-controlled-planetary-gear-trains-ccpgt-are-planetary-gear.jpg)