
Fuzzy Logic Controller Realization Using Microcontrollers_Presentation
20
Fuzzy Logic Controller Realization Using Microcontrollers Luis Santiago, Abdiel Vega, William Morales Advisor: Rogelio Palomera-Garcia
-
Upload
luis-enrique-santiago-hernandez -
Category
Documents
-
view
66 -
download
4
Transcript of Fuzzy Logic Controller Realization Using Microcontrollers_Presentation
FuzzyLogicControllerRealizationUsingMicrocontrollers
LuisSantiago,AbdielVega,WilliamMoralesAdvisor:RogelioPalomera-Garcia
Introduction
• FuzzyLogic(FL)controllingsystemisbasedonasetofrulesestablishedbyanexpert.• Theserulesaretranslatedintomathematicalstepsusedtorealizeaphysicalcontroller.
• FLcontrollerscanbephysicallyrealizedindifferentforms.• Weadoptlookuptablesandfunctionrealizations
• MicrocontrollerstouseareonefromtheMSP430family(TexasInstruments)andonefromtheKinetisseries(NXP)

FLArchitecture:
Fuzzificationstage(FS)
Fuzzyrulesteps
Defuzzificationstage
Fuzzificationstage(FS)
Fuzzyrulesteps
Defuzzificationstage
Fuzzificationstage(FS)
Fuzzyrulesteps
Defuzzificationstage
Fuzzificationstage(FS)
Fuzzyrulesteps
Defuzzificationstage
Fuzzificationstage(FS)
Fuzzyrulesteps
Defuzzificationstage
FuzzificationStage:
Involvesafunctiontransformationwherecrispinputaretransformedintofuzzyinputs.
FuzzyRuleSteps
Isdefinedasaconventionalstatementintheform:IFxisATHENyisB,whereAandBarelinguisticvaluesdeterminedbyfuzzysets.
DefuzzificationStage
Convertsfuzzyitemstocrispvalue.

FLMembershipsandMembershipValue

Objectives
• Todevelopamethodtointroducefuzzycontrollersschemesderivedfromapplicationsforuseinmicrocontrollers• Presentfocus:TexasInstrumentsMSP430andNXPKinetisseriesmicrocontrollers
• Todeveloptwomicrocontrollerbasedfuzzycontrollermethodsusing• Lookuptables,and• Functiondevelopmentinsidethemicro
• Toprovethecontrollerwithaspecificapplication• Astabilizerforaquadcopter

Problem&Hypothesis• MethodsproposedtoimplementtheFLfunction:
• A)ComputetheoutputsusingMatlabandbuildalook-uptablewithinthemicrocontroller.
• Advantage:usefulforsmallcontrollers• Disadvantage:memoryconsumption
• B)Toimplementthemembershipfunctions,rulesanddefuzzificationruleinthemicrocontroller.
Methodology
• Study,analyze,andcomprehendthedesignprocessofaFuzzyLogicController• Understandandmastertheuseofmicrocontrollertoestablishthesystemtobedesigned
• Implement,program,andexperimentwiththesystemdesignedinit’sbothformsusingtwodifferentmicrocontrollers
Results

FlowchartofRules
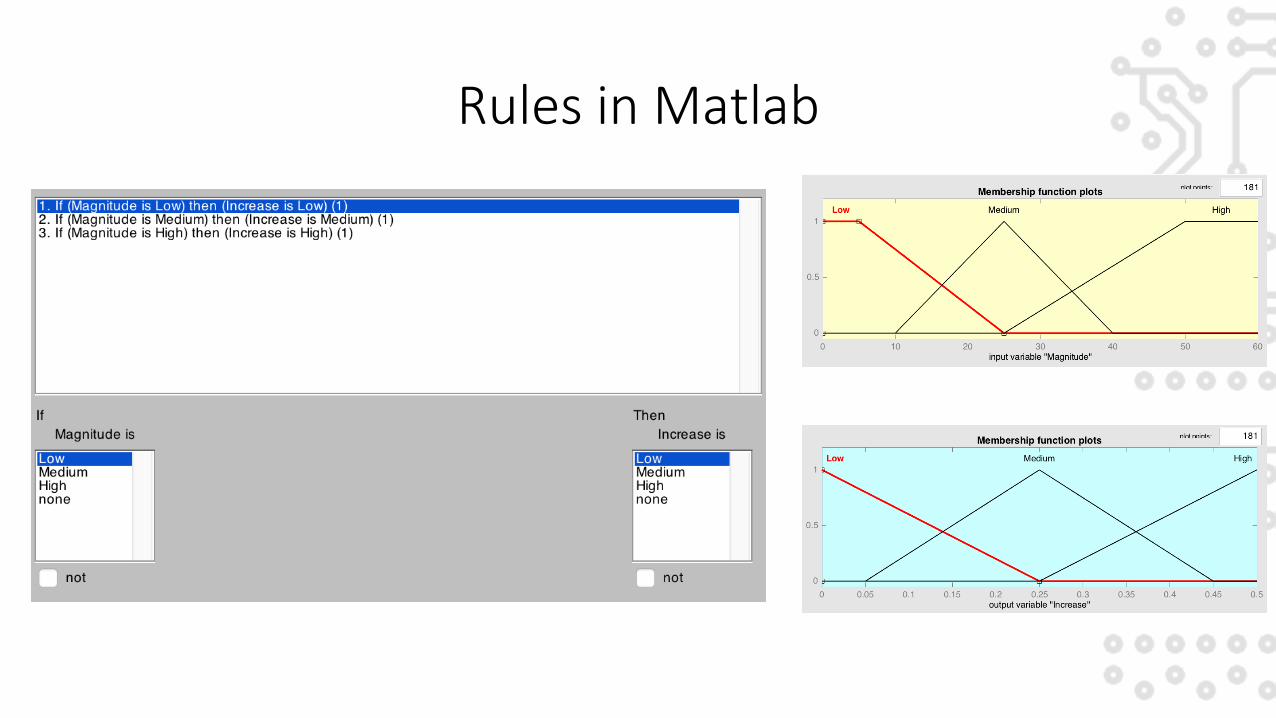
RulesinMatlab
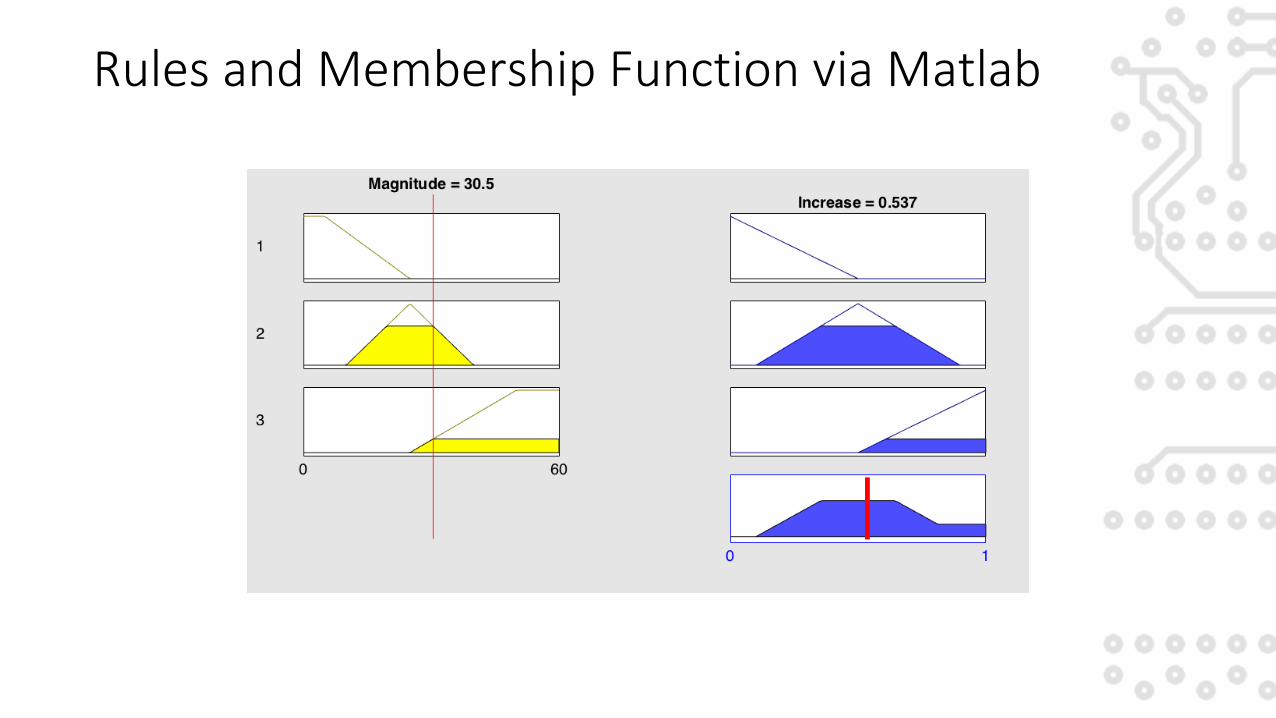
RulesandMembershipFunctionviaMatlab

SomeSubroutinesFunctions
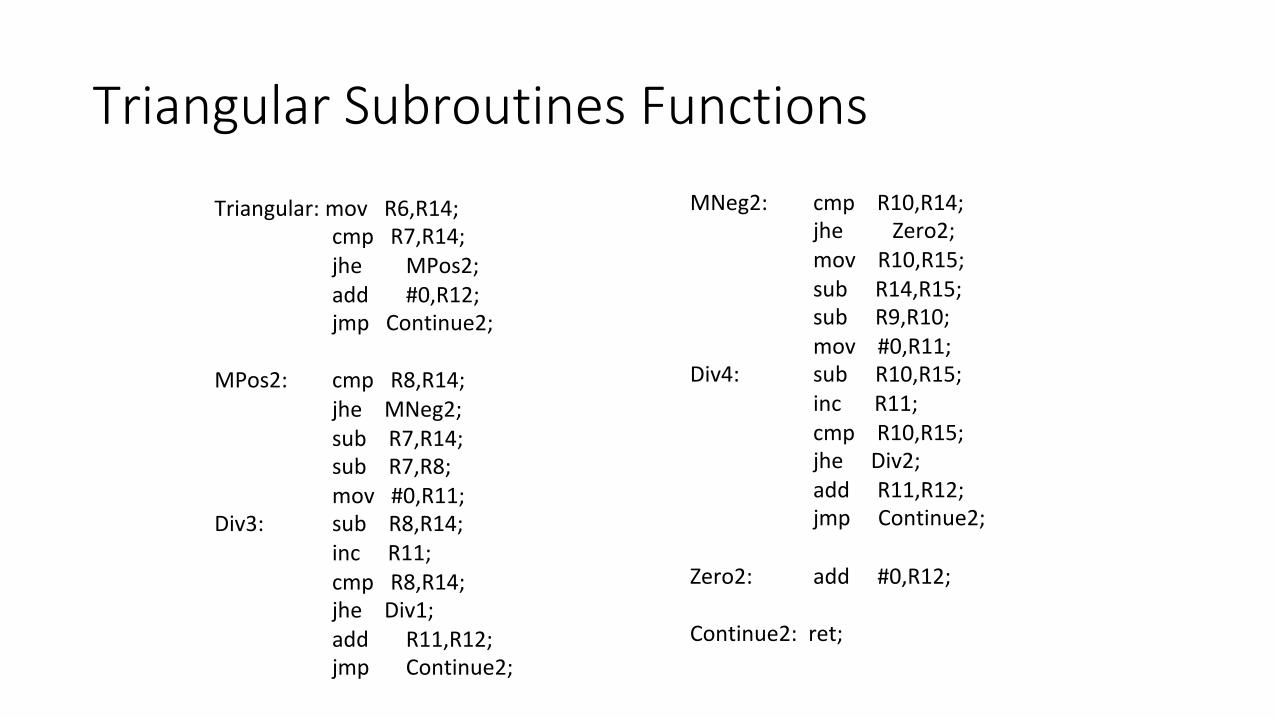
TriangularSubroutinesFunctions
Triangular:movR6,R14;cmpR7,R14;jhe MPos2;add #0,R12;jmpContinue2;
MPos2: cmpR8,R14;jheMNeg2;subR7,R14;subR7,R8;mov#0,R11;
Div3: subR8,R14;incR11;cmpR8,R14;jheDiv1;add R11,R12;jmp Continue2;
MNeg2: cmpR10,R14;jhe Zero2;movR10,R15;subR14,R15;subR9,R10;mov#0,R11;
Div4: subR10,R15;incR11;cmpR10,R15;jheDiv2;addR11,R12;jmpContinue2;
Zero2: add#0,R12;
Continue2:ret;
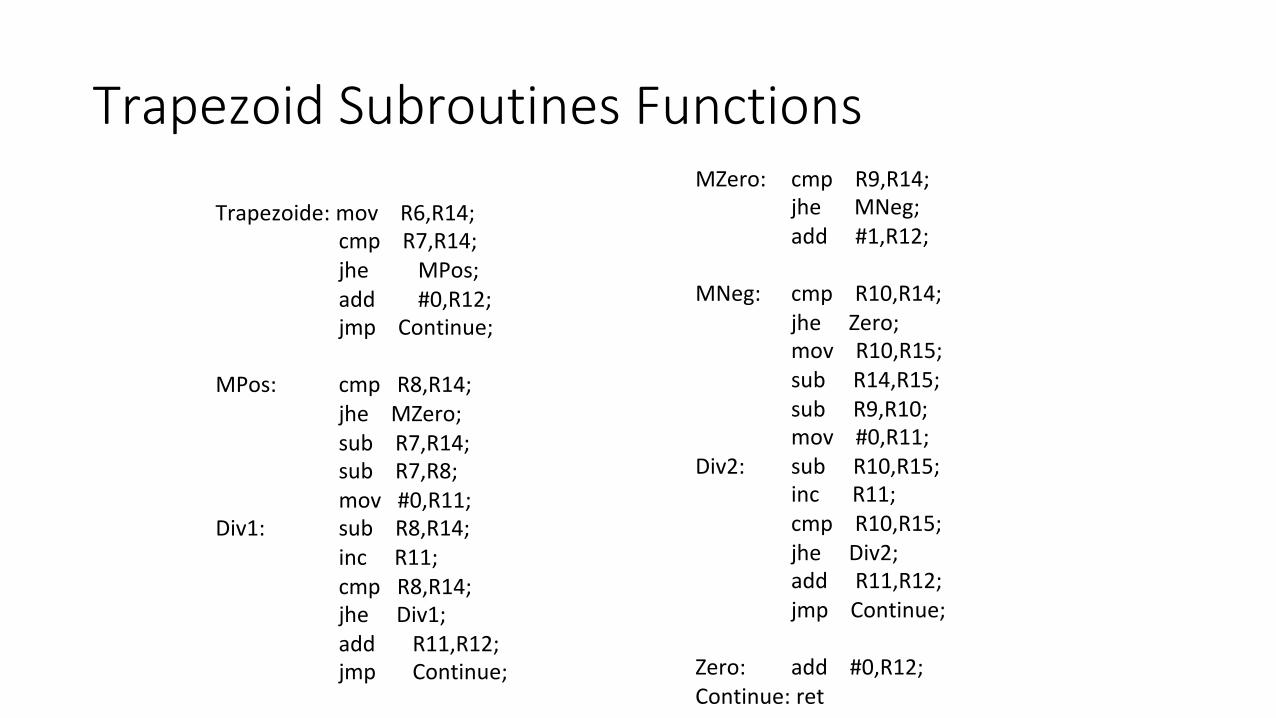
TrapezoidSubroutinesFunctions
Trapezoide:movR6,R14;cmpR7,R14;jhe MPos;add #0,R12;jmpContinue;
MPos: cmpR8,R14;jheMZero;subR7,R14;subR7,R8;mov#0,R11;
Div1: subR8,R14;incR11;cmpR8,R14;jheDiv1;add R11,R12;jmp Continue;
MZero: cmpR9,R14;jheMNeg;add#1,R12;
MNeg: cmpR10,R14;jheZero;movR10,R15;subR14,R15;subR9,R10;mov#0,R11;
Div2: subR10,R15;incR11;cmpR10,R15;jheDiv2;addR11,R12;jmpContinue;
Zero: add#0,R12;Continue:ret

Look-UpTableInput Angle Output Portion of
Voltage
0.46875 0.25
1.40625 0.25
2.34375 0.25
3.28125 0.25
4.6875 0.25
… …
10.3125 0.2534965
14.0625 0.2996183
20.15625 0.3957399
24.84375 0.496114
… …
Input Angle Output Portion of Voltage
25.3125 0.5031513
28.59375 0.5397465
30.46875 0.5640244
35.625 0.6482558
39.84375 0.7456897
… …
40.78125 0.75
45.9375 0.75
50.625 0.75
54.375 0.75
59.53125 0.75
FunctionDeveloped
FortheDefuzzification processweusetheWeightedAverageFunctiontocalculatetheoutputnumber accordingwiththesimulationonMatlab.
𝑂𝑢𝑡𝑝𝑢𝑡 = Σ𝜇 𝑥 ∗ 𝑥+,
Σ𝜇 𝑥
𝜇 𝑥 𝑔𝑟𝑎𝑑𝑒𝑜𝑓𝑤𝑒𝑖𝑔ℎ𝑡𝑜𝑛𝑡ℎ𝑒𝑚𝑒𝑚𝑏𝑒𝑟𝑠ℎ𝑖𝑝𝑥+, weightedaverageinput

FutureWork

• Setuptheoneinputsystemasaproofofconcept.Weareintheprocessofbuildingthehardwaresetup.• Basedonthefirstsystem,makeaselectionofthemicrocontrollermodelsappropriateforatwoandthreeinputsystem• Buildthecontrollerwithtwoaxes,hence,twoinputsorthreeinputs,dependingontherules.
References
1.JohnYen,RezaLangari,FuzzyLogicIntelligence,controlandInformation,Prentice-HallInc,1999
2.Jimenez,M.,Palomera,R.,andCouvertier,I.,IntroductiontoEmbeddedSystemsUsingMicrocontrollersandtheMSP430,Springer,2014
3.TexasInstrument.(APRIL2011–REVISEDJANUARY2012).MSP430Gx53-MSP430G2x13,DataSheet.Retrievedfromwww.ti.com/lit/ds/symlink/msp430g2553.pdf
4.Freescale.(2012-09-24).FRDM-KL25Z,User’sManual.Retreivedfromhttp://www.farnell.com/datasheets/1651277.pdf
Questions?
















