Fuzzy Gain-Scheduling Nonlinear Parametric Uncertain System.pdf
7
Fuzzy Gain-Scheduling Nonlinear Parametric Uncertain System Ebrahim A. Mattar Department of Electrical and Electronics Engineering College of Engineering University of Bahrain P.O. Box 13184 Kingdom of Bahrain [email protected] Khaled H. Al Mutib Department of Computer Science College of Computer and Information Sciences King Saud University P. O. Box 51178 Kingdom of Saudi Arabia [email protected] Abstract — This paper has presented two main issues related to ∞ H robust fuzzy control. The first has been fuzzy modeling of nonlinear dynamical systems, whereas the second was directed towards ∞ H fuzzy gain-scheduling control systems. Regarding fuzzy modeling, that was achieved by employing Takagi- Sugeno (T-S) fuzzy modeling technique. Employed (T-S) modeling technique was able to cluster an entire nonlinear global model into linear sub-models. With respect to the ∞ H fuzzy gain-scheduling, the paper first presented an approach for designing ∞ H fuzzy controller for disturbance rejection via defining a suitable Lyapunov potential function of the fuzzy model, hence designing a controller by reducing the problem to a standard Linear Matrix Inequalities (LMI) formulation. ∞ H fuzzy gain-scheduling was achieved via treating the (T-S) fuzzy sub-models as a Linear Parameter Varying (LPV) system, hence synthesizing a scheduling controller for variation in parameters. Keywords- H ∞ fuzzy; robust control; Takagi-Sugeno, Time Varying systems I. INTRODUCTION Based on the stability conditions, model-based control of T-S systems has been developed for the discrete case [1], [5], [7] in addition to the continuous case [9], [10]. Tanaka and Sugeno [5] have provided a sufficient condition for the asymptotic stability of a fuzzy system in the sense of Lyapunov through the existence of a common Lyapunov function for all the subsystems. Tanaka and Sano [7] have extended this to robust stability in case of systems with premise-parameter uncertainty. Tanaka et al. [3] suggest the idea of using linear matrix inequalities LMI for finding the common Lyapunov P matrix where in [2] an iterative algorithm for the choice of such common P matrix is proposed. A further and a significant step has also been taken to utilize Lyapunov function based control design techniques to the control synthesis problem for T-S models. The so- called Parallel Distributed Compensation (PDC) ( J. Li et al. [11], [12], [13], D. Niemann et al. [9], H. Wang et al. [14]) is one such control design framework that has been proposed and developed over the last few years. It has been shown that within the framework of T-S fuzzy model and PDC control design, design conditions for the stability and performance of a system can be stated in terms of the feasibility of a set of linear matrix inequalities (LMIs) ( J. Li et al. [11], [12], D. Niemann et al. [9], H. Wang et al. [14]). This is a significant finding in the sense that there exist very efficient numerical algorithms for determining the feasibility of LMIs, so even large-scale analysis and design problems are computationally tractable. In the conventional optimal control, the plant model must be known beforehand. However, the designer has to solve a Hamilton-Jacobi equation, which is a nonlinear partial differential equation [15]. Only some very special nonlinear systems have a closed-form solution. A hybrid fuzzy controller is introduced to stabilize the nonlinear system, and at the same time to eliminate effects of external disturbance below a prescribed level, so that a desired ∞ H control performance can be guaranteed, B. Chen [16]. In this approach only a linear fuzzy control design is used, although, the same ∞ H control performance is achieved. This attempt is made to create a bridge between two important control design techniques, i.e., robust and fuzzy control design, so as to supply ∞ H control design with more intelligence and fuzzy control design with better performance respectively (B. Chen et al. [4], B. Chen [16], K. Tanaka et al.[3]). In recent years, LMIs have emerged as powerful mathematical tools for the control engineers. However, many researchers expressed their results in LMI rather than classical AREs. Within the development of fast optimization algorithms for LMIs, the classical AREs results are more easily solved through their counterparts expressed in LMIs. For instance, J. Li et al. [18] shows the relation between LMIs and AREs through absolute stability criteria, robustness analysis and optimal control. This analysis of robust stability of fuzzy control systems via quadratic stabilization, ∞ H control theory is solved by LMI techniques. This LMI based technique is not only an analysis tool; it can also be utilized to automate the controller design process. There are a few numbers of research such as, P. Korba et al. [23], [17] are proposed a fuzzy controller via gain-scheduling method for the T-S fuzzy model based on Lyapunov method and LMI techniques. II. T-S FUZZY MODELS A rule with scheduling variables ( ) t j δ can be written as : Rule i: if ( ) t 1 δ is M i1 … and ( ) t j δ is M ij (1) then ( ) ( ) ( ) t t t i i i u B x A x + = & + w (t), ( ) ( ) t t i i x C y = 2011 Third International Conference on Computational Intelligence, Modelling & Simulation 978-0-7695-4562-2/11 $26.00 © 2011 IEEE DOI 10.1109/CIMSim.2011.31 127
-
Upload
oualid-lamraoui -
Category
Documents
-
view
213 -
download
1
Transcript of Fuzzy Gain-Scheduling Nonlinear Parametric Uncertain System.pdf

Fuzzy Gain-Scheduling Nonlinear Parametric Uncertain System
Ebrahim A. Mattar
Department of Electrical and Electronics Engineering
College of Engineering
University of Bahrain
P.O. Box 13184 Kingdom of Bahrain
Khaled H. Al Mutib
Department of Computer Science
College of Computer and Information Sciences
King Saud University
P. O. Box 51178
Kingdom of Saudi Arabia
Abstract — This paper has presented two main issues related to ∞H robust fuzzy control. The first has been fuzzy modeling of
nonlinear dynamical systems, whereas the second was directed
towards ∞H fuzzy gain-scheduling control systems. Regarding
fuzzy modeling, that was achieved by employing Takagi-
Sugeno (T-S) fuzzy modeling technique. Employed (T-S)
modeling technique was able to cluster an entire nonlinear
global model into linear sub-models. With respect to the ∞H
fuzzy gain-scheduling, the paper first presented an approach
for designing ∞H fuzzy controller for disturbance rejection via
defining a suitable Lyapunov potential function of the fuzzy
model, hence designing a controller by reducing the problem
to a standard Linear Matrix Inequalities (LMI) formulation. ∞
H fuzzy gain-scheduling was achieved via treating the (T-S)
fuzzy sub-models as a Linear Parameter Varying (LPV)
system, hence synthesizing a scheduling controller for variation in parameters.
Keywords- H∞fuzzy; robust control; Takagi-Sugeno, Time
Varying systems
I. INTRODUCTION
Based on the stability conditions, model-based control of T-S systems has been developed for the discrete case [1], [5], [7] in addition to the continuous case [9], [10]. Tanaka and Sugeno [5] have provided a sufficient condition for the asymptotic stability of a fuzzy system in the sense of Lyapunov through the existence of a common Lyapunov function for all the subsystems. Tanaka and Sano [7] have extended this to robust stability in case of systems with premise-parameter uncertainty. Tanaka et al. [3] suggest the idea of using linear matrix inequalities LMI for finding the common Lyapunov P matrix where in [2] an iterative algorithm for the choice of such common P matrix is proposed.
A further and a significant step has also been taken to
utilize Lyapunov function based control design techniques
to the control synthesis problem for T-S models. The so-called Parallel Distributed Compensation (PDC) ( J. Li et al.
[11], [12], [13], D. Niemann et al. [9], H. Wang et al. [14])
is one such control design framework that has been
proposed and developed over the last few years. It has been
shown that within the framework of T-S fuzzy model and
PDC control design, design conditions for the stability and
performance of a system can be stated in terms of the
feasibility of a set of linear matrix inequalities (LMIs) ( J. Li
et al. [11], [12], D. Niemann et al. [9], H. Wang et al. [14]).
This is a significant finding in the sense that there exist
very efficient numerical algorithms for determining the
feasibility of LMIs, so even large-scale analysis and design
problems are computationally tractable. In the conventional
optimal control, the plant model must be known beforehand.
However, the designer has to solve a Hamilton-Jacobi
equation, which is a nonlinear partial differential equation [15]. Only some very special nonlinear systems have a
closed-form solution. A hybrid fuzzy controller is
introduced to stabilize the nonlinear system, and at the same
time to eliminate effects of external disturbance below a
prescribed level, so that a desired ∞H control performance
can be guaranteed, B. Chen [16]. In this approach only a
linear fuzzy control design is used, although, the same ∞
H control performance is achieved. This attempt is made
to create a bridge between two important control design
techniques, i.e., robust and fuzzy control design, so as to
supply ∞H control design with more intelligence and fuzzy
control design with better performance respectively (B.
Chen et al. [4], B. Chen [16], K. Tanaka et al.[3]).
In recent years, LMIs have emerged as powerful mathematical tools for the control engineers. However,
many researchers expressed their results in LMI rather than
classical AREs. Within the development of fast
optimization algorithms for LMIs, the classical AREs
results are more easily solved through their counterparts
expressed in LMIs. For instance, J. Li et al. [18] shows the
relation between LMIs and AREs through absolute stability
criteria, robustness analysis and optimal control. This
analysis of robust stability of fuzzy control systems via
quadratic stabilization, ∞H control theory is solved by LMI
techniques. This LMI based technique is not only an
analysis tool; it can also be utilized to automate the
controller design process. There are a few numbers of
research such as, P. Korba et al. [23], [17] are proposed a
fuzzy controller via gain-scheduling method for the T-S
fuzzy model based on Lyapunov method and LMI
techniques.
II. T-S FUZZY MODELS
A rule with scheduling variables ( )tjδ can be written as :
Rule i: if ( )t1δ is Mi1 … and ( )tjδ is Mij (1)
then ( ) ( ) ( )tttiiiuBxAx +=& + w (t), ( ) ( )tt ii xCy =
2011 Third International Conference on Computational Intelligence, Modelling & Simulation
978-0-7695-4562-2/11 $26.00 © 2011 IEEE
DOI 10.1109/CIMSim.2011.31
127

For a given pair of vectors x(t) and u(t), the final output
of the fuzzy system is hence inferred as a weighted sum of
the contributing sub-models :
( )
( )( ) ( ) ( ){ }
( )( )∑
∑
=
=
+
=r
i
i
r
i
iii
t
ttt
t
1
1
δµ
δµ uBxA
x& (2)
( )
( )( ) ( ) ( ){ }
( )( )∑
∑
=
=
+
=r
i
i
r
i
iii
t
ttt
t
1
1
δµ
δµ uDxC
y
(3)
( )( )ti δµ is degree of fulfillment of an ith rule. Equ. (2) and
Equ. (3) can be written as :
( ) ( )( ) ( ) ( ){ }∑=
+=r
i
iii tttht1
uBxAx δ& (4)
( ) ( )( ) ( ) ( ){ }∑=
+=r
i
iii tttht1
uDxCy δ (5)
T-S fuzzy model can also be regarded as a quasi-linear
system, i.e., a linear system in both x(t) and u(t) whose
matrices ( ) ( ) ( ).,.,. CBA and ( ).D are not constant, but
varying as the operating condition of the system changes.
This is given as:
( ) ( )( ) ( ) ( )( ) ( )( ) ( )( ) ( ) ( )( ) ( )ttttt
ttttt
uDxCy
uBxAx
δδ
δδ
+=
+=& (6)
From Equs. (2-3) one can observe that for all possible
values of ( )tδ , these are bounded within a polytope whose
vertices are the matrices of the individual rules. The
parameter dependence is affine; that is, the fuzzy state
model ( )( ) ( )( ) ( )( ) ( )( )tttt δδδδ DCBA ,,, depends affinally on
( )tδ . This means the time-varying parameter ( )tδ varies in
a polytope Θ of vertices Lδδδ ,...,, 21
.
Time varying parameter ( )tδ is defined in terms of,
( ) { }L
Cot δδδδ ,...,,21
=Θ∈ in which L is the number of
vertices in a polytope. A state-space of Equ. (6) are given in
terms of a number of models depending on ( )tδ :
( )( ) ( )( )( )( ) ( )( )
LiCoii
ii,...,1:
tt
tt=
∈
DC
BA
DC
BA
δδ
δδ (7)
{ } ( ) ( ) ( ){ }∑∑ ==≥===
L
i ii
L
i iiitttLiCo
110,1:,...,2,1: ααα SS
and
=
ii
ii
iDC
BAS
Scheduling variables are function of the state, hence
( ) ( )( )tt xδδ = and ( ) ( )uBxAx xx +=& .
III. LPV: LINEAR PARAMETER VARYING
SYSTEMS Firstly, LTI systems are described as :
DuCxy
BuAxx
+=
+=& (8)
Secondly, Linear Time-Varying (LTV) are described by:
( ) ( )( ) ( )uDxCy
uBxAx
tt
tt
+=
+=& (9)
Finally, Linear Parameter-Varying (LPV) systems, where
the state-space model entries ( ) ( ) ( ).,.,. CBA and ( ).D are
explicit functions of a time-varying parameter ( )tδ :
( )( ) ( )( )( )( ) ( )( )uDxCy
uBxAx
tt
tt
δδ
δδ
+=
+=& (10)
Hence, LPV system is well-defined whenever its
parameter-dependence and its operating domain are fixed.
This can be expressed more formally by the set of state-
space relations as,
( )( ) ( )( )( )( ) ( )( )uDxCy
uBxAx
tt
tt
δδ
δδ
+=
+=& (11)
( ) .0, ≥∀Θ∈ ttδ One of the most significant potentiality
of the LPV framework is the derivation of LPV or “self-
scheduled” controllers. Such controllers have the same parameter-dependence as the system and can be described in
state-space form as :
( )( ) ( )( )( )( ) ( )( )yDxCu
yBxAx
tt
tt
KK
KK
δδ
δδ
+=
+=& (12)
IV. LPV ∞
H CONTROL
We are interested in a class of LPV systems where : ( )i
Parameter-dependence is affine, that is, state-space matrices
( )( ) ( )( ) ( )( ) ( )( )tttt δδδδ DCBA ,,, depend affinely on ( )tδ . ( )ii
The time-varying parameter ( )tδ varies in a polytope Θ of
vertices Lδδδ ,...,, 21
. That is:
( ) { }LCot δδδδ .,..,,: 21=Θ∈ (13)
these vertices represent the extremal values of the
parameters. This description encompasses many practical situations. From this characterization, it is clear that the
state-space matrices ( )( ) ( )( ) ( )( ) ( )( )tttt δδδδ DCBA ,,, involved
in a polytope of matrices whose vertices are the images of
the vertices Lδδδ ,...,, 21. In other words our fuzzy model is
put as :
( ) ( )( ) ( )
LiCoii
ii,...,1: =
∈
DC
BA
DC
BA
δδ
δδ (14)
( ) ( )( ) ( )
=
ii
ii
ii
ii
δδ
δδ
DC
BA
DC
BA (15)
128

For LPV system defined by the state-space equation as :
( )( ) ( )( )( )( ) ( )( )uDxCy
uBxAx
tt
tt
δδ
δδ
+=
+=& (16)
has quadratic ∞H Performance γ if and only if there
exists a Lyapunov function ( )xV such that ( ) PxxT
xV =
with 0>P that establishes global stability and the L2 gain
of the input/output map is bounded by γ . That is :
22
uy γ< (17)
along all possible parameter trajectories ( )tδ in Θ .
V. LFT : LINEAR Fractional TRANSFORMATION
An augmented LPV plant need to be considered, mapping exogenous inputs w and control inputs u to the controlled outputs z and measured outputs y. Such formulation is given by the standard Linear Fractional Transformation (LFT) and given in terms of LPV as :
( )( ) ( )( ) ( )( )( )( ) ( )( ) ( )( )( )( ) ( )( ) ( )( )uDwDxCy
uDwDxCz
uBwBxAx
ttt
ttt
ttt
δδδ
δδδ
δδδ
22212
12111
21
++=
++=
++=& (18)
( ) { },,...,,: 21 LCot δδδδ =Θ∈ for 0≥∀t . A plant is further
assumed to be polytopic, i.e. :
( )( ) ( )( ) ( )( )( )( ) ( )( ) ( )( )( )( ) ( )( ) ( )( )
LiCo
iii
iii
ii
...,2,1,:
ttt
ttt
ttt
22212
12111
21i
22212
12111
21
=
=∈
DDC
DDC
BBA
P
DDC
DDC
BBA
δδδ
δδδ
δδδ (19)
in which ,..., 1ii BA denote the values of ( )( ) ( )( ),...,1
tt δδ BA at
the vertices ( ) it δδ = of the parameter polytope. With
reference to Equ. (19) the problem dimensions are thus
given by : ( )( ) ( )( ) ( )( ) 1211
2211,,
mpmpnn ttt××× ℜ∈ℜ∈ℜ∈ δδδ DDA
With such notations and assumptions, the ∞
H control problem for LPV systems can be stated as follows;
Synthesis a LPV robust controller of state-space form of :
( )( ) ( )( )( )( ) ( )( )uDxCy
uBxAx
tt
tt
KK
KK
δδ
δδ
+=
+=& (20)
which guarantees Quadratic ∞H Performance γ for the
closed-loop system, in such away to ensure the following
control objectives: The closed-loop system is quadratically
stable over Θ . The L2-induced of the operator mapping w
into z bounded by γ for all possible trajectories ( )tδ in Θ .
To find the controller of Equ. (20), the LMI technique has
been used in this respect as will be presented in Section(V).
VI. LMI FORMULATION OF LPV ∞
H CONTROLLER
Considering a continuous LPV polytopic system of Equ.
(18) and working under the three assumptions in section 6.4,
and by letting NR and NS denote bases of the null space of
( )TT
122 , DB and ( )212 , DC , respectively, the ∞
H controller can
be synthesized. There exists an LPV controller
guaranteeing Quadratic ∞H Performance γ along all
parameter trajectories in the polytope Θ [22]. This is
achieved if and only if there exist two symmetric matrices
(R, S) in nn×ℜ satisfying the system of (2r +1) LMIs
formulation of :
Li
R
T
i
T
i
ii
i
T
i
T
ii
R,...,2,10
0
0
0
0
111
111
11
=<
−
−
+
I
N
IDB
DIRC
BRCRARA
I
N
γ
γ (21)
Li
S
T
i
T
i
ii
i
T
i
T
ii
S,...,2,10
0
0
0
0
111
111
11
=<
−
−
+
I
N
IDB
DISC
BSCSASA
I
N
γ
γ (22)
0≥
SI
IR (23)
where r is the number of vertices. Since these conditions
are LMI’s in the variables R and S, they are convex and fall
into the scope of efficient convex optimization techniques.
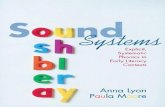
Figure 1. Output feedback
∞H fuzzy controller.
For γ , R and S solutions to the LMI’s Equs. (21-23),
there always exist LPV polytopic controllers solving the
problem [25]. In turn, such controllers are described by a
system of LMI’s from which one can extract a particular
solution by algebraic manipulations. More precisely, along
some trajectory ( )tδ in the polytope Θ , i.e :
( ) ( )∑=
=r
i
ii tt1
δαδ (24)
129

The state-space matrices:
( )( ) ( )( ) ( )( ) ( )( )tttt KKKK δδδδ DCBA ,,, of the LPV polytopic
controllers are then read as :
( )( ) ( )( )( )( ) ( )( )
( )
=
∑
= KiKi
KiKir
i
i
KK
KKt
tt
tt
DC
BA
DC
BA
1
αδδ
δδ (25)
iα ’s are computed according to the convex decomposition
Equ. (24). State-space data matrices KiKiKiKi DCBA ,,, are
computed off-line, the LPV controller matrices
( ) ( ) ( ) ( )δδδδ KKKK DCBA ,,, must be updated in real time
depending on the parameter measurement ( )tδ .
VII. ∞
H FUZZY GAIN-SCHERDULER
For a reference input r and in the continuous-time case, the T-S fuzzy control rules have the form of :
Rule i: if ( )t1
δ is Mi1 and ( )tjδ is Mij (26)
THEN ( ) ( ) ( ) ( )tttt ii xKyru −−=
where K is the controller gain and ( )t1δ is the scheduling
variable. With r(t) as the reference, the controller’s output
can be written as,
( )
( )( ) ( ) ( ) ( ){ }
( )( )∑
∑
=
=
−−
=r
i
i
r
i
ii
t
tttt
t
1
1
δµ
δµ xKyr
u
(27)
and can be expressed as :
( ) ( )( ) ( ) ( ) ( ){ }∑=
−−=r
i
ii ttttht1
xKyru δ
( ) ( )( ) ( )( )[ ] ( )tttt xCKr δδ +−= (28)
If the scheduling vector ( )tδ is a function of the state x(t),
then u(t) represents a nonlinear gain-scheduled control law.
Hence, the goal of the controller design is to determine the
constant matrix Ki such that the desired dynamic of the
closed-loop system and the desired steady-state, input-
output behavior are obtained. Designing the state-feedback
gains Ki requires dealing with the system dynamics and
hence ensuring stability. This problem is solved by means
of LMI. For the T-S fuzzy controller in Equ. (26), a feed-
forward gains Vi can be also included in the design and can
be given as :
( )( ) 11 −−+−=
iiiiiiBKBACV (29)
Closed-Loop Fuzzy Dynamics :
The closed-loop system consisting of the fuzzy model and
the fuzzy controller is obtained by substituting the fuzzy
controller Equ. (28) into the state equation of the fuzzy
model Equ. (4). The closed-loop system is then given by :
( ) ( )( ) ( )( ) ( )( ) ( ) ( ){ }∑∑= =
++−=r
i
r
j
iiiiiji ttththt1 1
rBxKCBAx δδ& (30)
It is assumed throughout this section that; the weight of each
rule in the fuzzy controller is equal to that of the
corresponding rule in the fuzzy model. This assumption is
easy to satisfy since all weighting factors of the controller can be simply taken over from the known fuzzy model.
Then, Equ. (30) can be rewritten as :
( ) ( )( ) ( )( ) ( ) ( )( ) ( )( ) ( )∑ ∑= <
++=
r
i
jiij
j
r
ji
iiiiitththtththt
1 22 x
GGxGx δδδδ&
( )( ) ( )( ) ( )tthth i
r
i
r
j
ji rB∑ ∑= =
+1 1
δδ (31)
( )jiiij KBAG −= (32)
For the particular case of common matrices Bi, i.e., Bi=B for
all sub-models i=1,2,…,r and for the shared rules, the
following simplified description of the entire closed loop system can be derived as :
( ) ( )( ) ( ) ( ) ( ){ }∑=
+−=r
i
iiiiitttht
1
rBxKBAx δ& (33)
Fuzzy ∞
H Gain-Scheduler :
With reference to Fig. 3., the system receives input signal
u(t), which has already computed based on the controller
gain K. It will be necessary to choose appropriate values of
Ki in. In section 6 we introduced the ∞H control under
which the system to be controlled described as LPV system.
Fuzzy gain-scheduling is introduced here in twofold, The
first is via the use of different fuzzy state space sub-models
(i.e. T-S models) to designate the parameters that are
changing. This will formulate the bases of constructing a
suitable LPV system based on fuzzy models for the entire
operating region. ∞H controller is then synthesized in
according to LPV systems.
The entire fuzzy system can then be described as:
( ) ( ) ( ) ( ) ( )tttww
rBxAx .. +=& (34)
( ) ( ) ( )ttww
xCy .= (35)
Based on LPV theory, fuzzy state-space are given by:
( ) ( )( ) ( )( ) ( )[ ]∑∑= =
+−=r
i
r
j
jiiijiw thth1 1
. KCBAA δδ (36)
( ) ( )( )∑=
=r
i
iiw th1
. BB δ (37)
( ) ( )( )∑=
=r
i
iiw th1
. CC δ (38)
These equations are expressed as,
130

( ) ( )( )∑=
=r
i
i
wiw th1
. AA δ (39)
( ) ( )( )∑=
=r
i
i
wiw th1
. BB δ (40)
( ) ( )( )∑=
=r
i
i
wiw th1
. CC δ (41)
The fuzzy controller depends of two parts: First (u1) and
is based on the state variables of the controlled system
whereas (u2) is based on the difference between the
reference input r(t) and system output y(t) :
( ) ( )( ) ( )∑=
−=r
i
ii ttht1
1 xKu δ (42)
( ) ( ) ( )( ) ( )∑=
−=r
i
ii tthtt1
2 xCru δ (43)
The entire gain-scheduled control law is then determined
by,
( ) ( )xx 12 uuu −= (44)
( ) ( ) ( )( ) ( ) ( )( ) ( )∑ ∑= =
−−=r
i
r
i
iiii tthtthtt1 1
xKxCru δδ
( ) ( ) ( )( )[ ] ( )∑=
+−=r
i
iiitthtt
1
xKCru δ (45)
( ) ( ) ( ) ( )ttt w xKru .−= ( ) ( )( )[ ]∑
=
+=r
i
iiiw th1
. KCK δ (46)
as the state feedback-gain matrix. The closed-loop behavior of the fuzzy controller is then written as,
( ) ( ) ( ) ( ) ( )ttt ww rBxAx .. +=& (47)
In Equ. (47) ( )tw
A is a time-varying system matrix,
satisfying the LPV in Equ. (7),
( ) { }LiCot ij
ww ,...,2,1: =∈ AA , (48)
for the entire time domain the matrices ij
wA are formed as
follows,
[ ]i
w
i
w
i
w
i
w
ij
w KCBAA +−= (49)
Equ. (49) gives the transformations ( )i
w
i
w
i
w KBA ,, for the
synthesis of the controller, denoted as Fuzzy Scheduler, into
the standard problem ( )jii
KBA ,, . The gain-scheduler
fuzzy control was shown in Fig. 3., with reference input r(t)
applied to the system. Once the system parameters start to
change, the fuzzy controller rather select K from a large range computed to satisfy the ∞
H performance. At the
same time, the ∞H controller K is computed to satisfy the
extremals of system parameter variations as expressed by
Equ. (21). In addition, Fig. 3. shows the fuzzy scheduling
variable ( )tδ that makes the controller switches from one
controller gain Ki to another. The figure shows the
variation of two parameters, Mi and Mj, and when more
parameters are required, the figure will be complicated to
visualize. From the figure, the parametric box represent the
changes in system parameters of two dimensional, whereas
the shown membership function show the extremes in
parameters variation which have been obtained from the
modeling procedure.
VIII. A CASE STUDY:
A NONLINEAR ANTENNA SIMULATION
This section presents an application of the Fuzzy ∞H
Gain-Scheduling to the multi-input multi-output antenna
dynamic system. It is considered as nonlinear systems,
where the system parameters are assumed to be measured in
real-time. Based on linearization of the dynamic system
around specific operating conditions, LPV representation
are developed. A gain-scheduled ∞H control presented in
section (VII) is immediately applicable. With reference to the T-S fuzzy model, the associated fuzzy linearized
dynamics of the antenna system variables are re-described
by replacing varying parameter by variables in a state-space
representation in the form of :
( ) ( )( ) ( )
( ) ( )
ψψ−′−ψ−
ψψ+ψ′
ψ−′ψϕ−ϕ−ϕ
=
ψψ
ϕϕ
I
2sinIIbT
cosIsinI
2sinIIbT
2
21
22
&&
&
&&&
&
&z (50)
( )( )
+
=
ψ
ϕ
te
te
0100
0001zy [ ]Tψψϕϕ= &&z (51)
-20 -10 0 100
0.5
1
-20 -10 0 100
0.5
1
-20 -10 0 100
0.5
1
-20 -10 0 100
0.5
1
-4 -2 0 2 40
0.5
1
-4 -2 0 2 40
0.5
1
-5 0 5 100
0.5
1
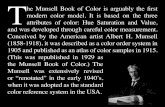
Figure 2. Extracted membership functions of all inputs regressors
associated with the azimuth angle.
ϕb ψb I 'I
Isotropic 0.3375 0.3375 0.2 Nms2 0.2 Nms2
Non-isotropic 0.3375 0.3375 0.2 Nms2 0.02 Nms2
131

Varying parameters 21,υυ and
1ζ are all functions of the
antenna system motion, therefore available to measurement
in real time. Fig. 3. displays the associated variations in the
linear system parameters. The antenna system was even
found to be very close to the marginally stable localities,
depending on the sign of 1υ . Parametric changes (i.e.
21,υυ and 1ζ ), shown in Fig. 4, are found to be driving
the system performance to be sever.
0 100 200 300 400 500 600-1
0
1
2x 10
-3
alp
ha
10
0 100 200 300 400 500 6000.01
0.012
0.014
beta
1
0 100 200 300 400 500 6000.01
0.02
0.03
beta
2
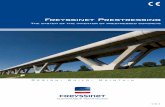
Time (s) Figure 3. Linearized antenna Parameter (
2110 ,, ββα ).
Figure 4. Predefined parameter trajectory for
the antenna system.
There are abrupt changes in parameters as functions of the antenna system motion that range over a large operating
domain. Stability properties of the system are greatly
influential. For further validations of the final LPV
controllers, (18) operating points have been selected in the
parameter range.
These points are regularly distributed over the entire region
of operation. For the system formulation of the nonlinear
antenna introduced above and the interconnection shown in
Fig. 3., we are in a position to perform the ∞H gain-
scheduled controller synthesis. The optimization algorithm
converged and produced a polytopic LPV controller with a
minimum γ , with structure of :
( )( ) ( )( ){ }4,3,2,1,,, == itsCots
iδδ KK
Figure 5. Step response of the antenna system
subject to local simulation of 18 points.
Figure 6. Step response of the antenna system
subject to local simulation of 18 points.
Fig. 4. shows the antenna parameter variations of the
linearized antenna system parameters 2110 ,, ββα .
Superimposing the time responses corresponding to 18
different testing points is first considered. Using the
concept of polytopic, the dynamics of the antenna system
is modeled in terms of four corners. For each of these
points, one determines its polytopic coordinate, then the
corresponding system model and controller. Furthermore,
in order to perform such real simulations, one parameter
trajectory has been examined. Such trajectory varies continuously in the operating domain and converges to a
predefined value within one second time. Fig. 4. shows
such pre-defined parameters trajectory used in this analysis.
132

The actual response due to such parameter trajectory has to
be computed. The system was able to converge to the
required set-points with an achieved stability even under
changes and uncertain in the parameters. This confirms the ∞
H fuzzy gain-scheduling. In this simulation, changes in
model parameters were computed by the pre-defined trajectory, and the ∞
H controller was switching from one
set of controller gain K1 to another set K2 depending on the
model parameters.
IX. CONCLUSIONS
In the gain-scheduling ∞H synthesis, the nonlinear systems
under concern were treated as uncertain system with
parametric range of variations (i.e. region of variation).
Hence, scheduled ∞H controller has been synthesized for
such parameter varying systems. Knowledge of real time
parameter changes is obtained via the employed fuzzy
modeling technique. From the designed ∞H gain-scheduling
for both dynamic systems under concern, it was found that
the scheduled ∞H controller where able to adjust controller
gain parameters to follow the changes in the performance
requirements for scheduled ∞H characteristics.
Synthesizing ∞H fuzzy gain-scheduling is indeed a new
paradigm in the area of fuzzy control. Considering the
global model of a nonlinear fuzzy system to schedule the ∞
H controller is one approach, however other approaches are to be investigated.
REFERENCES
[1] Tanaka K. and Sugeno M., “Stability Analysis and Design of Fuzzy
Control Systems”, Fuzzy Sets & systems, vol. 16, No.4, pp.277-240,
1992.
[2] Joh J., Chen Y. and Langari R., “On the Stability Issues of Linear Takagi-Sugeno Fuzzy Models”, IEEE Transactions on Fuzzy
Systems, vol.6, No.3, pp.402-410, August 1998.
[3] Tanaka K., Ikeda T. and Wang H., “Robust Stabilization of a Class of Uncertain Nonlinear Systems via Fuzzy Control: Quadratic
Stabilizability, ∞
H Control Theory, and Linear Matrix Inequalities”, IEEE Transactions on Fuzzy Systems, vol.4, No.1, pp.1-13, February
1998.
[4] Chen B., Tseng C. and Uang H., “Robustness Design of Nonlinear Dynamic Systems via Fuzzy Linear Control”, IEEE Transactions on
Fuzzy Systems, vol. 7, No.5, pp.571-585, October 1999.
[5] Tanaka K. and Sugeno M., “Stability Analysis and Design of Fuzzy Control Systems”, Fuzzy Sets and Systems, Vol. 45, No. 2, pp. 135-
156, 1992.
[6] Lo J. and Chen Y., “Stability Issues on Takagi-Sugeno Fuzzy Model, Parametric Approach,” IEEE Transaction of Fuzzy Systems, vol. 7,
No. 5, pp. 597-607, October 1999.
[7] Tanaka K. and Sano M., “Trajectory Stabilization of a Model Car
via Fuzzy Control ”, Fuzzy Sets and Systems, Vol. 70, pp. 155-170, 1995.
[8] Sugeno M., “On the Stability of Fuzzy Systems Expresses by Fuzzy
Rules with Singleton Consequents,” IEEE Transaction of Fuzzy Systems, vol. 7, No. 2, pp. 201-224, April 1999.
[9] Niemann D., Li J., Wang H. and Tanaka K., “Parallel Distributed Compensation for Takagi-Sugeno Fuzzy Models: New Stability
Conditions and Dynamic Feedback Designs”, IFAC 1999 (Beijing), pp.207-212, July 1999.
[10] Wang H., Tanaka K. and Griffin M., “An Approach to Fuzzy
Control of Nonlinear Systems: Stability and Design Issues,” IEEE Transaction of Fuzzy Systems, vol. 4, pp. 14-23, February 1996.
[11] Li J., Niemann D., Wang H., Tanaka K., “Parallel Distributed
Compensation for Takagi-Sugeno Fuzzy Models: Multiobjective Controller Design”, Proc. American Control Conference, (San
Diego), pp.1832-1836, 1999.
[12] Li J., Niemann D., Wang H., Tanaka K., “Multiobjective Dynamic Feedback Control of Takagi-Sugeno Model via LMIs”, Joint Conf. Of
Information Science, (North Carolina), pp 159-162, 1998.
[13] Li J., Niemann D., Wang H. and Tanaka K., “Dynamic Parallel Distributed Compensation for Takagi-Sugeno Fuzzy Systems: An
LMI approach”, Proce. American Control Conf. (San Diego), pp.1832-1836, 1999.
[14] Wang H., Niemann D., and Tanaka K., “T-S Fuzzy Model with
Linear Rule Consequence and PDC Controller: A Universal Framework for Nonlinear Control Systems”, Proc. 9th IEEE Int.
Conf. on Fuzzy Systems, 2000.
[15] Isidori A. and Asolfi A., “Disturbance Attenuation and ∞
H Control
via Measurement Feedback in Nonlinear Systems,” IEEE Trans. Automatic control, vol. 37, pp.1283-1293, September 1992.
[16] Chen B., “∞
H Tracking Design of Uncertain Nonlinear SISO
Systems: Adaptive Fuzzy Approach”, IEEE Transactions on Fuzzy Systems, vol. 4, No.1, pp.32-43, February1996.
[17] Korba P., Werner H., and Frank P. “LMI-Based Fuzzy Gain-
Scheduling for the TORA Nonlinear Benchmark Control Problem”, In J. Maciejovski, editor, Control 2000, Cambridge, UK, 4-7
September 2000.
[18] Li J., Wang H. and Bushnell L., “On the Relationship Between LMIs and AREs: Applications to Absolute Stability Criteria, Robustness
Analysis and Optimal Control”, Submitted to Proc. 39th CDC, Sydney, Australia, 2000.
[19] Doyle J., “Lecture Notes on Advances in Multivariable Control”,
ONR/Honeywell Workshop, Minneapolis, October, 1984.
[20] Zhou K., Doyle J. and Glover K., “Robust and Optimal Control”, Prentice Hall, 1996.
[21] Zhou K. and Doyle J., “Essentials of Robust Control”, Prentice Hall, 1998.
[22] Gahinet P., Nemirovski A., Laub A. and Chilali M., “Linear Matrix
Inequalities Toolbox”, The Math works, 1995.
[23] Chilali M. and Gahint P., “∞
H Design with Pole Placement Constraints: an LMI Approach”, Proc. Conf. Dec. Contr., pp. 553-
558, 1994.
[24] Korba P., Babuska R., Vebruggen H. and Frank P., “Fuzzy Gain Scheduling: Controller and Observer Design by Means Of the
Lyapunov Method and Convex optimization Techniques”, to be appear in IEEE Trans. On Fuzzy Systems.
[25] Apkarian P. and Biannic J., “Gain-Scheduled ∞
H Control of a
Missile via Linear Matrix Inequalities”, Journal of Guidance Control and Dynamic vol. 18, No. 3, pp.532-538.
133