Fuzzy Control of Semi-Active Automotive Suspensions

of 5
Transcript of Fuzzy Control of Semi-Active Automotive Suspensions
-
8/2/2019 Fuzzy Control of Semi-Active Automotive Suspensions
1/5
Proceedings ofthe 2009 IEEEInternational Conference onMechatronics and AutomationAugust 9 - 12, Changchun, ChinaFuzzy Control of Semi-Active AutomotiveSuspensionsAws Abu-Khudhair, Radu Muresan, and Simon X. Yang
School o fEngineeringUniversity o fGuelphGuelph, Ontario Li G 2Wi, Canada{aabukhud, rmuresan, syang}@uoguelph.ca
Abstract - This paper presen ts a new fuzzy con trol ler forsemi-active vehicle suspension systems, which has a significantlyfewer number of rules in comparison to existing fuzzycontrollers. The proposed fuzzy control le r has only nine fuzzyrules, whose performance is equivalent to the existing fuzzycontroller with 49 fuzzy rules. The proposed controller with lessnumber of fuzzy rules will be more feasible and cost-efficient inhardware implementation. For comparison, a linear quadraticregulator controlled semi-active suspension, and a passivesuspension are also implemented and simulated. Simulationresul ts show that the ride comfort and road holding areimproved by 28% and 31.4, r espectively, with the fuzzycontrolled semi-active suspension system, in comparison to thelinear quadratic regulator controlled semi-active suspension.
Index Terms - Passive Suspension System, Semi-ActiveSuspension System, Linear QuadraticRegulator, Fuzzy Control.I. INTRODUCTION
The main function of suspension systems is to isolate thedisturbances from the road to the passenger, whilemaintaining good vehicle handling and road holding.Currently most commercial vehicles employ a standardpassive suspension system consisting of purely passiveelements (spring and damper). Inherent to the passivesuspensions is a trade-off between ride quality and roadholding characteristics. Soft springs and dampers allow forgood ride quality at the expense of increased vertical wheeland body motion. Meanwhile to provide good road holdingand handling, large spring and damper coefficients arerequired [1]. Hence, a trade-off must be made by choosingcoefficients large enough to reduce wheel and vehicle motion,yet small enough to provide an acceptable ride quality [1, 2].One solution to this t rade-off problem is the addition of acontrollable element (variable damper) to the passivesuspension system; this setup is referred to as semi-activesuspension. In order to achieve the required response fromthe semi-active suspension system, a suitable control strategymust be implemented to provide the necessary dampingcoefficient for the variable damper in the semi-activesuspension. The focus of this paper is to provide a suitablecontrol method to generate the required damping coefficient.Fuzzy logic control (FLC) has been extensively studiedand implemented in various systems such as: cruise control,engine speed control, air conditioning units, torque generationfor electrical vehicles, and most recently self-parking vehicle
978-1-4244-2693-5/09/$25.00 2009 IEEE 2118
system [3-5]. A main advantage for this type of controlstrategy is that an accurate description of the system is notnecessary, also since the system relies on various sensors,imprecisions inherent in the measurements obtained by thevarious sensors are unavoidable, fuzzy logic control is idealfor this type of situation, since accurate and precise input isnot required. Due to these advantages, many researcherschoose to look into this type of control strategy to eliminatethe trade-offbetween the ride quality and vehicle handling. In[6], the authors proposed a fuzzy controller tuned to enhancemainly the ride comfort of the vehicle. Through varioussimulations they were able to show that the FLC is able toprovide a superior ride quality in comparison to othercommon control strategies such as skyhook control [10, 13].In [8] a FLC that is capable of providing a reasonableperformance with respect to both ride quality and vehiclehandling was developed. The authors achieved this by using atotal of 49 rules in their FLC.This paper investigates the performance enhancement afuzzy logic controller is able to provide. The simulations willbe performed on a quarter car suspension model. In order tofully understand the performance enhancement the FLC isable to provide, two additional suspension systems aremodelled and simulated using the same test conditions, theseare the standard passive suspension system [2, 9] and a LQRcontrolled semi-active suspension system [1, 2, 9].The remainder of this paper is structured as follows.Section II outlines the automotive suspension model used totest the performance of both passive and semi-activesuspension systems, and the implementation of the standardLQR control method. The proposed fuzzy control method isgiven in Section III. Section IV presents the simulationresults. Finally, the conclusion and future work are providedin Section V.
II. AUTOMOTIVE SUSPENSION MODEL AND LINEARQUADRATIC REGULATOR
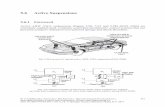
A. Quarter Car ModelA quarter car suspension model with two degrees offreedom is shown in Fig.I . The model represents the vehiclesuspension system as it relates to one of the four wheels. Thismodel assumes that the vehicle tire does not leave the ground,the vertical displacement of both the vehicle body and the tireare measured from their respective equilibrium positions, andthe vehicle body (sprung mass) is a rigid body.
-
8/2/2019 Fuzzy Control of Semi-Active Automotive Suspensions
2/5
----.J z,
----.J z.
----.J z,Fig. 1Quarter car passive suspension system. Fig. 2 Quarter car semi-active suspension system.
k, = 16000 N/m, bs=1000 Ns/m, k, = 160000 N/m,m, = 240 kg, mll=36 kg.The model described above must be extended to properlyimplement the functionality of the semi-active suspension [1,9, 13]. This is accomplished by adding a variable damper inparallel with the passive elements (spring and damper). Byconnecting the variable damper in this manner theperformance of the system is enhanced, by providing anadditional support to the passive elements, and allowing forincreased stability of the system. Fig. 2 shows a schematicdiagram of the system.
State Output
o1m,o-1 /mu
Fig. 3 Block diagram ofthe semi-active suspension.L- - - - -1 A ~ - - - - '
z,
N = l ~ .:000o 1/mu 0
Road DisturbanceInput
B. Linear Quadratic RegulatorLinear quadratic regulator theory has been studied, andused by many researchers in an attempt to design an optimalcontroller for active and semi-active suspension systems [2, 9,12]. This type of controller works towards generating anoptimal actuator force that leads to the minimization of aperformance index. This performance index (5) is related tothe ride quality, suspension deflection (Xl) and tire deflection(X3 )'
J I 1 E[Tf"2 2 .2 2 .2] (5)= ;'!!,T c, 0 Z, +PXI +Pz, +Px, +P4u
By introducing the variable damper to the passive systemequations (I ) to (3) are modified to account for the additionalelement. Equation (4) shows the modified state spacerepresentation of this system.X =AX +NXb" ",;+ Li , (4)where bSemi is the damping coefficient of the variable damper(controlled parameter) in the design, and
The block diagram representation of the state space equationsused in the implementation of the quarter car semi-activesuspension system is shown in Fig.3.
By comparing (3) and (4), and inspecting Fig. 3, It ISevident that the passive suspension model is equivalent to thesemi-active suspension model, with the assumption that thedamping coefficient of the variable damper is zero for thepassive suspension. This fact allows for a simple simulation ofboth the passive and semi-active systems.
(3)
,L =[ ,Io- I
b Lm ,1
-b, I m.
ooo
In the quarter car model shown in Fig. I, k, and bsrepresent the spring constant and the damping coefficient,respectively; m, is the sprung mass that represents the quartercar equivalent vehicle body mass; mil represents the unsprungmass that is the equivalent to the mass of the vehicle axel andtire; and ZII, z, and z; represent the vertical displacements fromstatic equilibrium of the sprung mass, unsprung mass, and theroad, respectively. The linearized equations of motion arewritten as [9]m,=, +b, ( i, -iu)+k,( z, -z.,)=O, ( I)
mu=u- b,( i, - i u)- k,( z, - zu)+ k,(z, - z,) =O. (2)In order to implement this model, a state spacerepresentation is constructed as [9]X = A X + Li"
whereA=[-/1m, -b,11m,o 0
k, I mu b , Imu - k , Imu
[X [Z ' . :X2 ZX = = s ,X 3 Zu - z ,.X 4 i uwhere Xl is the suspension deflection; X2 is the absolutevelocity of the sprung mass; X3 is tire deflection; and X4 is theabsolute velocity of the unsprung mass. For this system thecoefficients are described as [9]
2119
-
8/2/2019 Fuzzy Control of Semi-Active Automotive Suspensions
3/5
PO
0,4.3
LG
(c)
(a)ZR
(b)MEl\I
500.0 1000 .0 1500.0 2000.0 2500.0 3000.0 3500.0 4000.0Damping Coefficient
0,2-
0 ~ ' , -0.3 -0',2 O 0.'0 0:1 0.'2Suspension Deflection (em)
ZR1.0-0.8-0.6-
/I 0.4-0.2-0.00.0
,.
Fig. 6: Membership Functions for the proposed Fe. (a) Suspension deflectionInput MFs; (b) Body velocity Input MFs; (c) Damping coefficient output MFs.
,t
III. THE PROPOSED NEW Fuzzy CONTROLLERFLC is one of the most efficient and popular controlmethods that currently exist for controlling the variabledamping system in semi-active suspensions. A standard FLCis composed of a fuzzification interface, fuzzy rule base,decision making logic, and defizzification interface [14, 15].The Fuzzification interface is the process which transforms
measurements into fuzzy sets which are then used in the fuzzyrule base, and decision making process. The Defuzzificationinterface is the process which converts the fuzzy output intocrisp values to be used by the plant. The input and outputfunctions used in the controller depend on the workingdynamics of the plant to be controlled, and are subject to thedesigners knowledge and method of design.In the proposed FLC two inputs are implemented, theyare the suspension deflection (SD, Fig. 6.a) , and the sprungmass body velocity (BY, Fig. 6.b). Each of these inputs isrepresented by using three triangular membership functions(MFs) with the following linguistic variables: Negative (NE),Zero (ZR), and Positive (PO). The output membershipfunction (Damping Coefficient, Fig. 6.c) is designed as asingleton fuzzy set composed of five membership functionswith the linguistic variables: Zero (ZR), Small (SM), Medium(ME), Large (LG), and Extra Large (XL).NE ZR PO
: 0 6- - + " ~ - - + - - t0,4-
(b)
--.J z,
--.Jz
(a)Fig. 4 Equivalence o fforce control and damper control systems . (a) Force
control ; (b) damper control.
Fig. 5 LQR semi-active control laws.In Fig. 5, the active force is given asF;, = -K1(BT P + S ) x , (6)whereR= __I_ s = [ - ~ - 0' 2 2 2 ,ms ms ms ms8=[0 11m, 0 l /m J , P=[PI p, P 3 pJ
Fb = - - -'tm J .\0 - X .J
The performance matrix (P) above contains the weightsused in the LQR control performance; these weights are setdepending on which aspects of the suspension system aredesired to be enhanced. In this paper the values are picked toreduce the sprung mass acceleration without significantlypenalizing the other performance aspects. This is done byusing very small coefficients in the performance matrix [9]:P = [0.4 0.16 0.4 0.16]
Using the determined active force, the dampingcoefficient of the semi-active damper can be calculated usingthe conditions in Fig. 5. Although this control methodprovides a reasonable performance enhancement to allperformance criteria, it requires specific and very accurateroad and vehicle dynamics measurements, which in tumrequire expensive sensors.
Depending on the actuator force and the differencebetween the absolute velocity of the sprung mass and that ofthe unsprung mass, the semi-active damper (bsemD will take ona specific value using the equations in Fig. 5 [2].
2120
-
8/2/2019 Fuzzy Control of Semi-Active Automotive Suspensions
4/5
The control method is implemented in the fuzzy rule baseusing fuzzy conditional statements. Table I shows the 9 fuzzyrules implemented in the controller. These rules areinterpreted by the controller as follows:IF (SD is NE) and (BV is NE), THEN (DC is XL).IF (SD is NE) and (BV is ZR) , THEN (DC is LG).IF (SD is PO) and (BV is PO), THEN (DC is XL) .
TABLE!FLC RULES FOR CALCULATING THE DAMPING COEFFICIENT-40 -'-------------------------
Time Interval.... Passive Response - Semi-Act ive - LORResponse - Semi-Act ive - FLC Response
Fig. 7 Results for ride quality simulation.t, l ' .r., .r., .r.,. " . . . .. . . .1A1 lY :Ai :If; :If; :If;l U, :n ,1 :n ,1f#- -- -- -- -- -- -- - 'l-0 l I '" I b I '", 'l . 'H . 'l .'.'t ','t ## '.'t. . , .. . .
V V V V-0.05-0.04-0.03
0.040.05
0.03:[ 0.02
.2 0.010; :Q)C -0 .01ei= -0.02
Rule # Suspension Body DampingDeflection Velocity Coeffi cient(SD) (BV) (DC)I NE NE XL2 NE ZR LG3 NE PO ME4 ZR NE SM5 ZR ZR ZR6 ZR PO SM7 PO NE ME8 PO ZR LG9 PO PO XL
IV. SIMULATION R ESULTS
By implementing the memberships of Fig. 6, along withthe rules in Table I, a suitable damping coefficient can bedetermined to stabilize the system efficiently.
-0.5 -'----- - - - - - - - - - - - - - - - - - - - -
0.5 ,- -- - - - - - - - - - - - - - - - - - - - -
Time Intreval
50
- - ~ - - - 0 . - - - ..0..- - -:0..-- - -.4 t--:..._- - - . .-- - - . .- - - - . . ~ - _ _ . . _ - - -EO3
-0.4+--- - ' " -- ---' ' ----- - ' " -- ---'" -- ---'
. . . . Passive Response -r-e-r-Semt-Acnve - LORResponse - Semi-Active- FLC Response
. . . . Passive Response Semi-Active - LOR Response - Semi-Act ive - FLC Response
Fig. 8 Results for road holding simulation.
Time Intreval
Fig. 9 Results for support of static weight simulat ion.By analysing the magnitude of the various responsesobtained from the simulation , it is clear that fuzzy logic
control is able to provide a superior performance enhancementover the LQR controller, and the passive suspension system.Table II contains a summarization of the observed magnituderesponse by each system.
In this section , the quarter car model is used to test theperformance of the proposed fuzzy controller. Theperformance of the proposed controller is compared to that ofthe LQR control method for semi-active suspensions, as wellas to a standard passive suspension system.In order to obtain a clear indication of the performanceenhancement FLC is able to provide for semi-activesuspensions, three functions of the mode led suspensionsystem are simulated [2]:1. Ride quality (Fig. 7)In general the ride quality is optimized by minimizingthe vertical acceleration of the passenger's location.2. Road holding and handling (Fig 8)This function is characterized by the vehiclescornering, breaking, and traction abilities. Theperformance of the suspension in regards to thesecharacteristics can be improved if the variations in thenormal tire loads are minimized.3. Support of static weight (Fig 9)This function is enhanced by minimizing the rattlespace requirement of the vehicle (suspension deflection).In all three simulations, the road disturbance is modelledas a sine wave with a frequency of 1Hz and amplitude of0.01m. The inputs to the FLC are assumed to be readilyavailable, either through direct measurement; using proximityand velocity sensors, or through a standard observer system.
2121
-
8/2/2019 Fuzzy Control of Semi-Active Automotive Suspensions
5/5
TABLE IIPERFORMANCEDIFFERENCES BETWEEN THE PASSIVE AND SEMI-ACTIVE
SUSPENSIONS
Type of Ride Road Holding Support of StaticQualitySuspension (m/s2) (m) Weight (mm)Passive 54 0.088 7.7SuspensionLQR
Controlled 44 0.076 5.5SASSFL
Controlled 31 0.052 2.5SASS
Using the data in Table II, it is evident that the proposedfuzzy logic controller offers a significant improvement inperformance with comparison to the optimal (LQR) controlmethod. The simulation results show that the three suspensionfunctions are enhanced with the fuzzy controlled semi-activesuspension system in comparison to the optimal controlledsemi-active suspension system by 28%, 31% and 54%respectively. From these results it 's evident that the proposedfuzzy logic controller is outperforming the LQR controller byat least 28%, which is a significant improvement.
V. CONCLUSIONIn this paper, a fuzzy logic control strategy for semi-activesuspension systems is developed. The fuzzy logic controlleris used to generate the damping coefficient required by thevariable damper in semi-active suspension systems. Anoptimal controller based on the linear quadratic regulator forsemi-active suspensions, and a passive suspension system, areadopted for comparison with the proposed fuzzy logiccontroller.Simulation results show that the proposed fuzzy logiccontroller performs significantly better than the linearquadratic regulator control method for the same semi-activesuspension system, as well as a standard passive suspensionsystem. Analysis of the results show that the trade-offproblem suspension systems suffer from is significantlyreduced by using the proposed new fuzzy logic controller.Furthermore, the performance enhancement that the proposedfuzzy logic controller provides, is not only limited to a singlesuspension function as in the controller proposed by theauthors in [6], but is also tuned to enhance the performance ofall three basic functions of the suspension system.
Unlike the work presented in [8] where the authors used atotal of 49 rules to achieve a 40% improvement over thepassive suspension, the proposed fuzzy controller is able toachieve a 42% improvement over the passive system usingonly 9 rules. This is a significant improvement over thedesign in [8], since the implementation of the 49 rules inhardware will add to the complexity, cost, as well as the sizeof the design.
2122
To further demonstrate the effectiveness of the proposedcontroller, future work will involve the implementation of thefuzzy controller using the Spartan 3E FPGA board, whilesimulating the quarter car model using the LabVIEW designand simulation environment.Further research would also be performed to look into theperformance of the controller, when using an observer systemto predict the state of the vehicle suspension system. Thiswould reduce the dependency of the control strategy on thevarious expensive sensors that are needed to determine thestate of the suspension, which is needed by the control system.
REFERENCES[1] A.1. Barr and 1.L Ray, "Con tro l of an act ive suspension using fuzzy
logic," in Proc. o f5th IEEE Int!. Conference on Control and Automation,New Orleans, USA, 1996, pp. 42-48.[2] R. Rajamani, "Vehicle Dynamics and Control, " Springer, Berlin, 2006.[3] R. Riadi, R. Tawegoum, A. Rachid, and G. Chasser iaux, "Decentra lizedtemperature fuzzy logic control of a passive ai r condi tioning uni t, " inProc. o f 15th IEEE IntI. Mediterranean Conference on Control andAutomation, Athens, Greece, 2007, pp. 1-6.[4] Q. Zeng and J. Huang, "The design and simulat ion of fuzzy logiccontroller for parallel hybrid electric vehicles," in Prec. o f the IEEE IntI.Conference on Automation and Logistics, Shandong, China, 2007, pp.908-912.[5] R. Muller and G. Nocker, "Intellignet cruise control with fuzzy logic," inProc. o f IEEE IntI. Intelligent Vehicles '92 Symposium, Detroit, USA,1992, pp.173-178.
[6] C.F. Nicolas, 1. Landaluze, E. Castrillo, M. Gaston, and R. Reyero,"Application of fuzzy logic control to the design of semi-activesuspension systems," in Proc. o f 6th IEEE IntI. Conference on FuzzySystems, Barcelona, Spain, 1997, pp. 987-993.[7] L. Zheng, Y. N. Li, J. Shao, and X. S. Sun, "The design of a fuzzysliding mode controller of semi-active suspension systems with MRdampers," in Proc. o f 4th IEEE IntI. Conference on Fuzzy Systems andKnowledge Discovery, Hainan, China, 2007, pp. 514-518.
[8] Z. Li, Y. Yang, X. Gong, Y. Lin, and G. Liu, "Fuzzy control of the semiact ive suspens ion with MR damper based on uGA," in Proc. o f IEEEInt!. Vehicle Power and Propulsion Conference, Harbin, China, 2008,pp. 1-6.
[9] T. Butsuen, "The Design of semi-active suspensions for automotivevehicles," Ph.D. diss., M.LT., 1989.[10] M. Bigarbegian, W. Melek, and F. Golnaraghi, "A novel neuro-fuzzycontroller to enhance the performance of vehicle semi-active suspensionsystems," Vehicle System Dynamics, vol. 46, no.8, pp. 691-711,2008.[11] L.C. Fel ix -Herran , J.1. Rodriguez -Or ti z, R. Soto, and R. Rami rez
Mendoza, "Modeling and control for a semi-active suspension with aMagnetorheological damper including the actuator dynamics," in Proc.o f IEEE IntI. Electronics, Robotics and Automotive MechanicsConference, Morelos, Mexico, 2008, pp 338-343.
[12] L.R. Ray, "Robust l inear-optimal control laws for active suspensionsystems," ASME Journal o f Dynamic Systems, Measurement, andControl, vol. 114, no. 4, pp. 592-598, 1992.[13] M. Ahmadian, and C.A. Pare, "A quarter-car exper imental analysis ofalternative semi-active control methods," Journal o f Intellignet MaterialSystems and Structures, vol. 11,no. 8,pp. 604- 612, 2000.[14] K. Tanaka, H.O. Wang, "Fuzzy Control Systems Design and Analysis: ALinear matrix Inequality Approach," John Wiley & Sons, New York,2001.[15] M. E. Dupre, "GA Optimized Fuzzy Control of an Autonomous MobileRobot," MSc Thesis, University of Guelph, 2007.