
FundamentalConcepts of OperatingSystems -...
46
Real-Time Computing and Communications Lab. Hanyang University Fundamental Concepts of Operating Systems Minsoo Ryu Department of Computer Science and Engineering Hanyang University
Transcript of FundamentalConcepts of OperatingSystems -...
Real-Time Computing and Communications Lab.Hanyang University
Fundamental Concepts of Operating Systems
Minsoo Ryu
Department of Computer Science and EngineeringHanyang University
2
2
Real-Time Computing and Communications Lab.Hanyang University
OS, what and why?1 XPage
Dual mode operation2 XPage
OS is a reusable SW platform 3 XPage
What is RTOS?4 XPage
Real-Time Computing and Communications Lab.Hanyang University
OS, What and Why?
4
4
Real-Time Computing and Communications Lab.Hanyang University
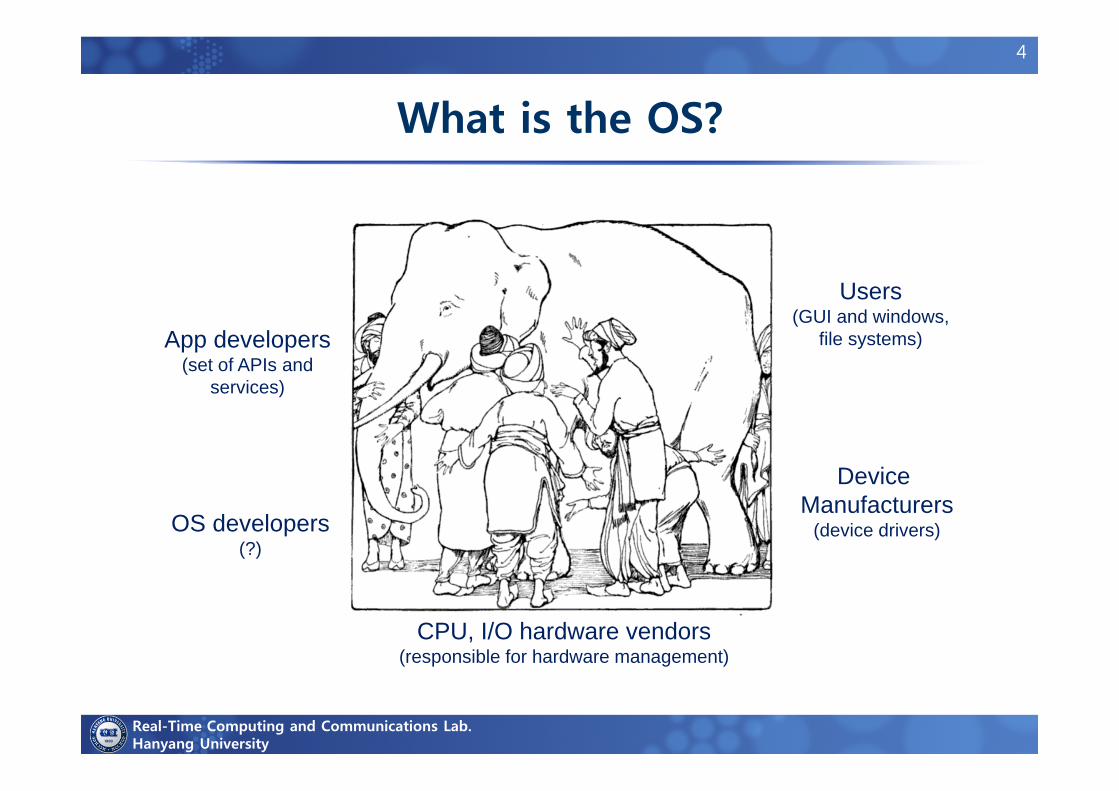
What is the OS?
App developers(set of APIs and
services)
Users(GUI and windows,
file systems)
Device Manufacturers
(device drivers)OS developers(?)
CPU, I/O hardware vendors(responsible for hardware management)
5
5
Real-Time Computing and Communications Lab.Hanyang University
Huge and Complex
Red Hat Linux version 7.1 (released April 2001) contained over 30 million lines About 8,000 man-years of development effort Over $1 billion (in year 2000 U.S. dollars)
Linux has 18M lines of code
45M lines of code
6
6
Real-Time Computing and Communications Lab.Hanyang University
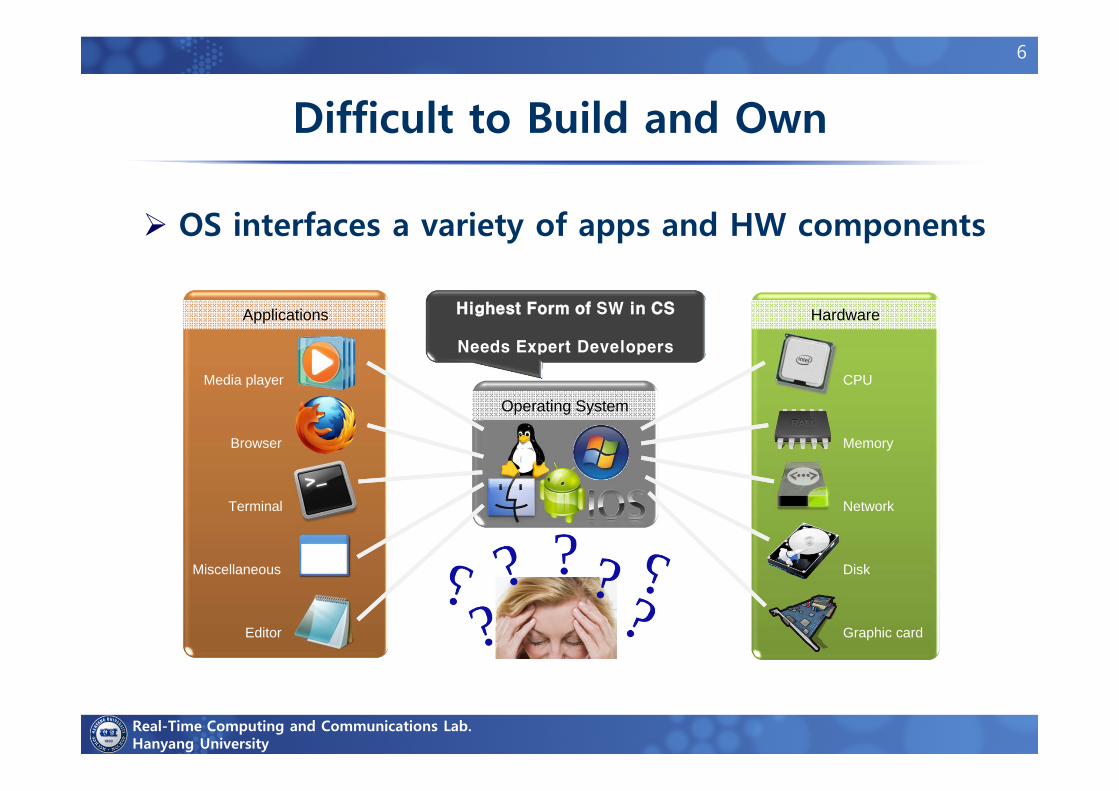
Difficult to Build and Own
OS interfaces a variety of apps and HW components
CPU
Memory
Network
Disk
Graphic card
Media player
Browser
Terminal
Miscellaneous
Editor
HardwareApplications
Operating System
Highest Form of SW in CS
Needs Expert Developers
7
7
Real-Time Computing and Communications Lab.Hanyang University
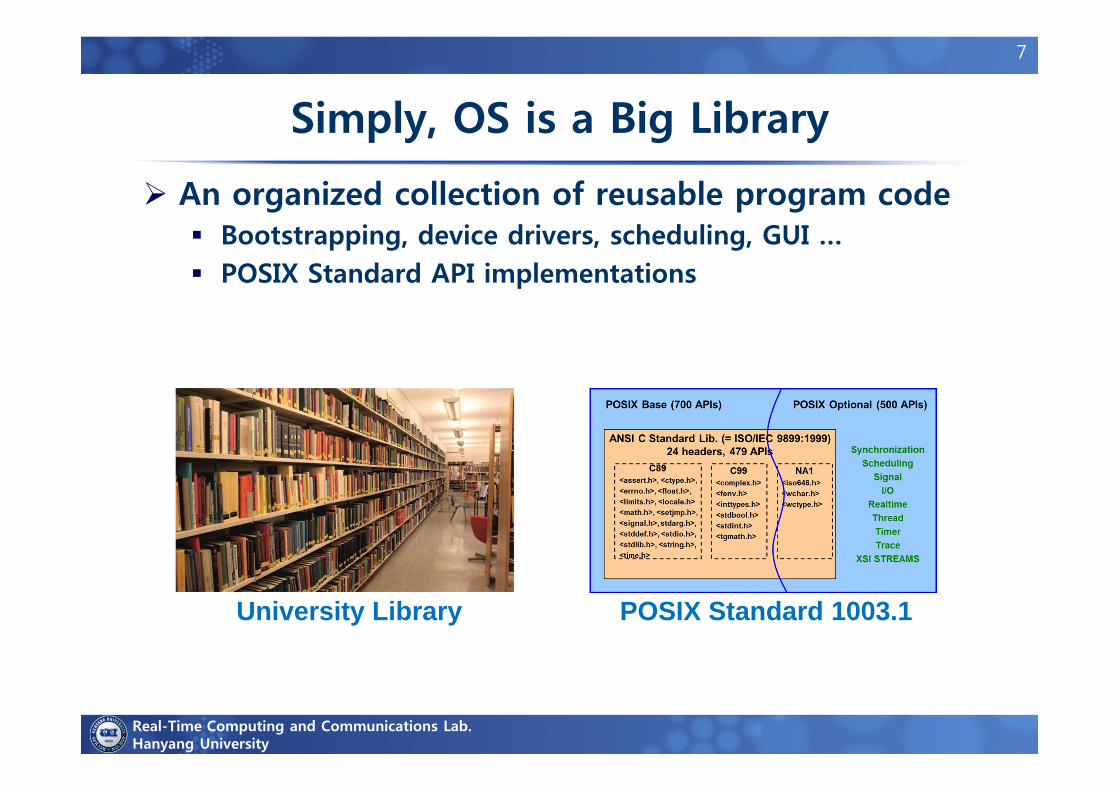
Simply, OS is a Big Library
An organized collection of reusable program code Bootstrapping, device drivers, scheduling, GUI … POSIX Standard API implementations
University Library POSIX Standard 1003.1
8
8
Real-Time Computing and Communications Lab.Hanyang University
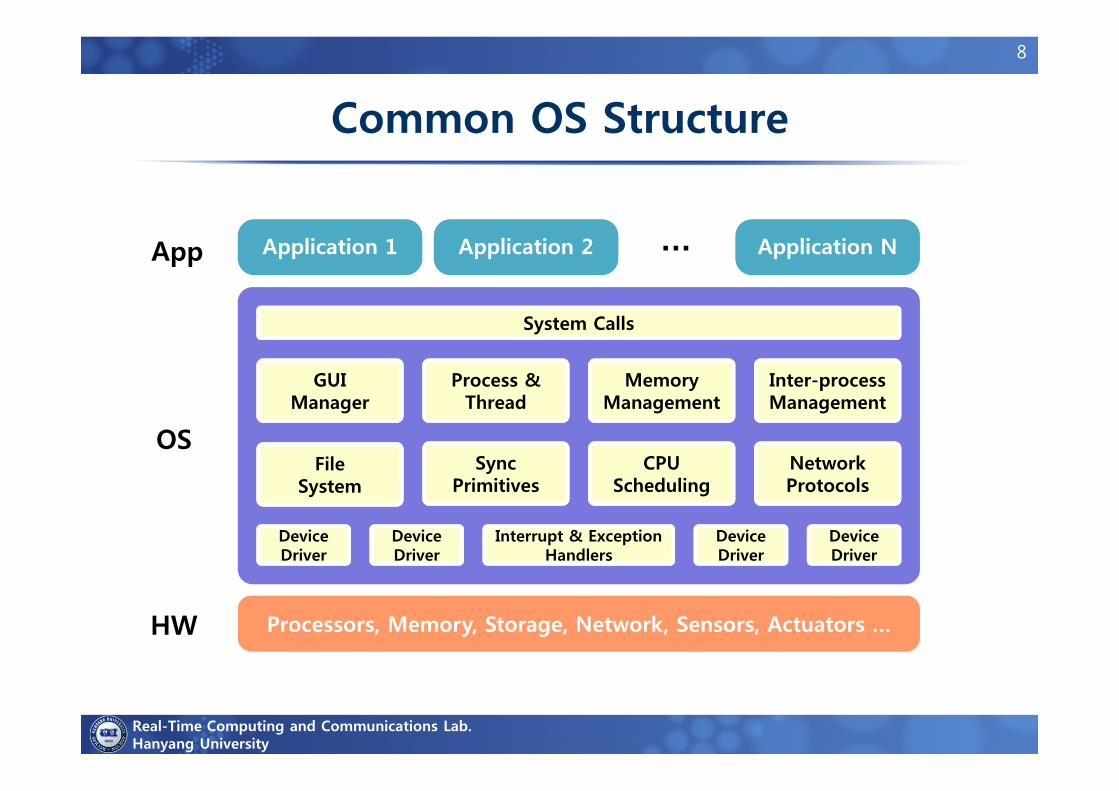
Common OS Structure
Process &Thread
GUIManager
MemoryManagement
Inter-processManagement
FileSystem
SyncPrimitives
CPUScheduling
NetworkProtocols
System Calls
DeviceDriver
DeviceDriver
Interrupt & ExceptionHandlers
DeviceDriver
DeviceDriver
Processors, Memory, Storage, Network, Sensors, Actuators …
Application 1 Application 2 Application N…
OS
HW
App
9
9
Real-Time Computing and Communications Lab.Hanyang University
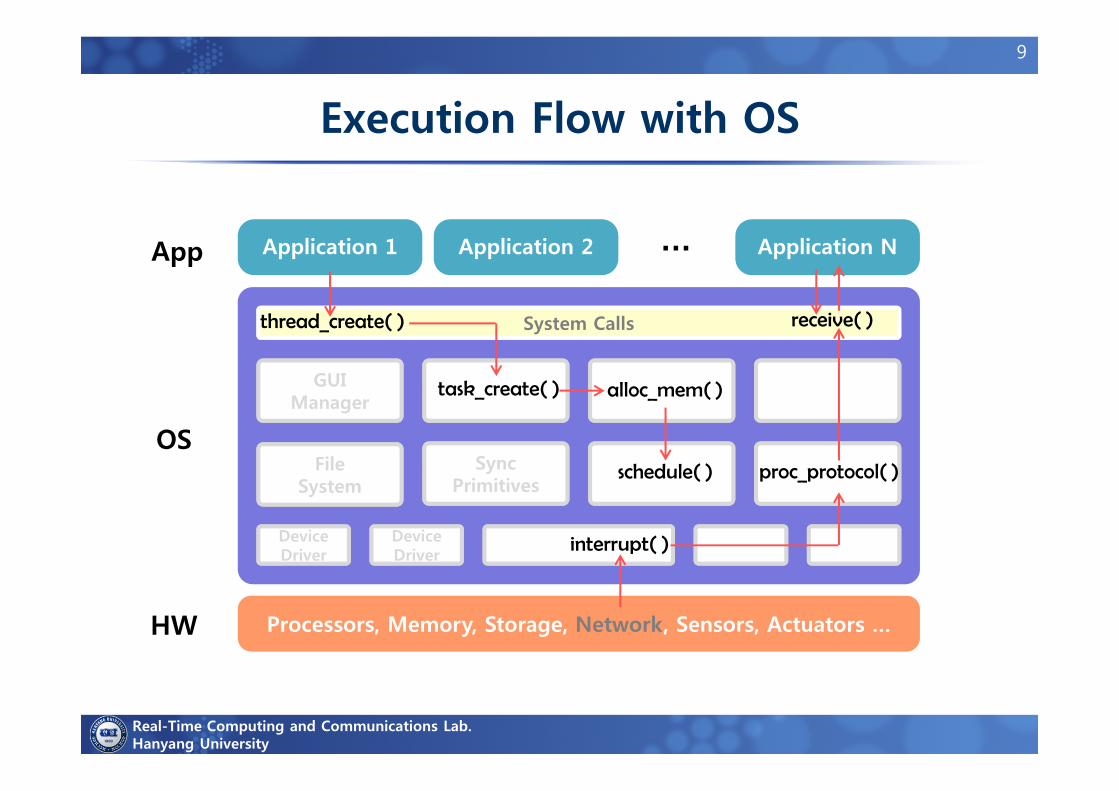
Execution Flow with OS
GUIManager
FileSystem
SyncPrimitives
System Calls
DeviceDriver
DeviceDriver
Processors, Memory, Storage, Network, Sensors, Actuators …
Application 1 Application 2 Application N…
OS
HW
App
thread_create( )
task_create( ) alloc_mem( )
schedule( )
receive( )
interrupt( )
proc_protocol( )
10
10
Real-Time Computing and Communications Lab.Hanyang University
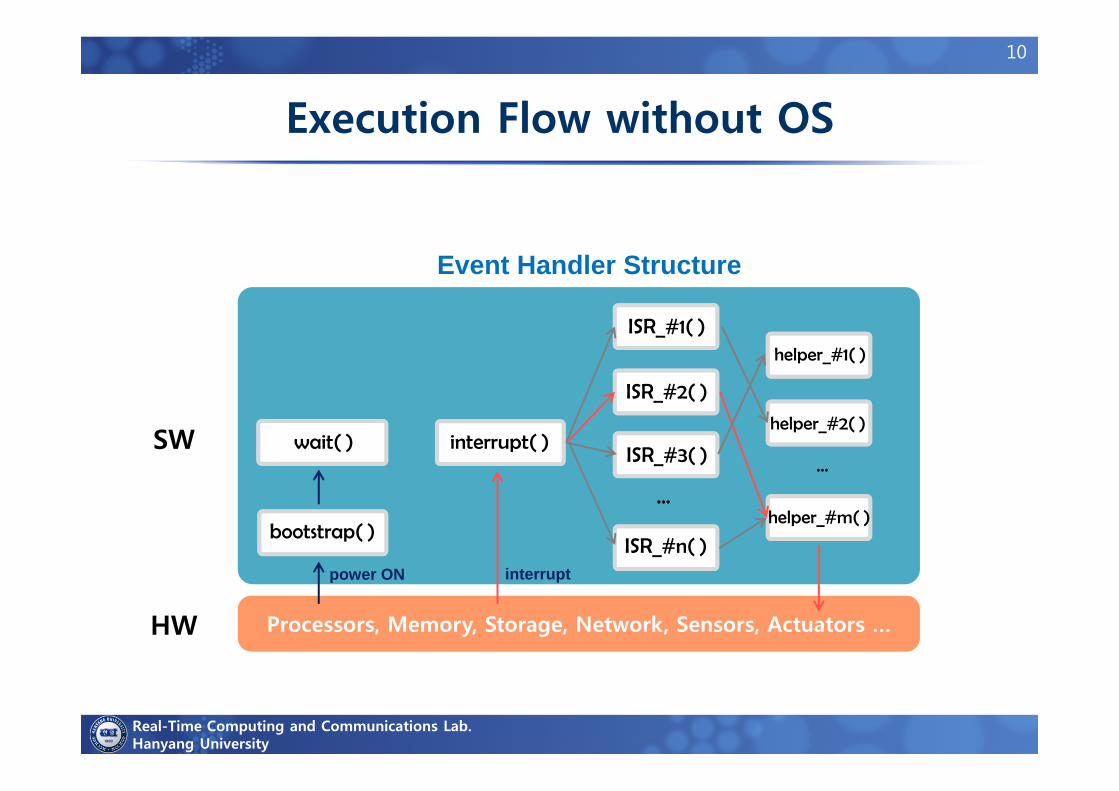
Execution Flow without OS
Processors, Memory, Storage, Network, Sensors, Actuators …
SW
HW
interrupt( )wait( )
bootstrap( )
ISR_#1( )
power ON
ISR_#2( )
ISR_#3( )
ISR_#n( )
…
interrupt
helper_#1( )
…
helper_#2( )
helper_#m( )
Event Handler Structure
11
11
Real-Time Computing and Communications Lab.Hanyang University
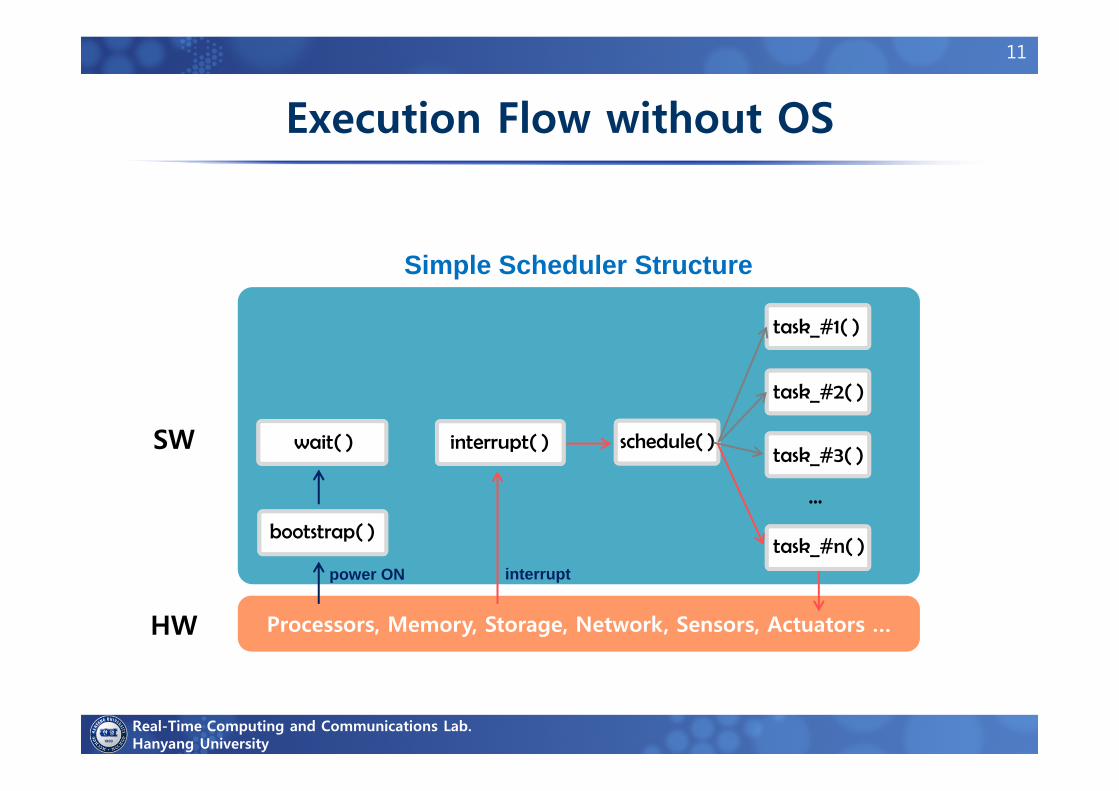
Execution Flow without OS
Processors, Memory, Storage, Network, Sensors, Actuators …
SW
HW
interrupt( )wait( )
bootstrap( )
power ON interrupt
schedule( )
Simple Scheduler Structure
task_#1( )
task_#2( )
task_#3( )
task_#n( )
…
12
12
Real-Time Computing and Communications Lab.Hanyang University
OS is more than a libraryOS is more than a library
1. Abstraction
2. Protection
3. Illusion
13
13
Real-Time Computing and Communications Lab.Hanyang University
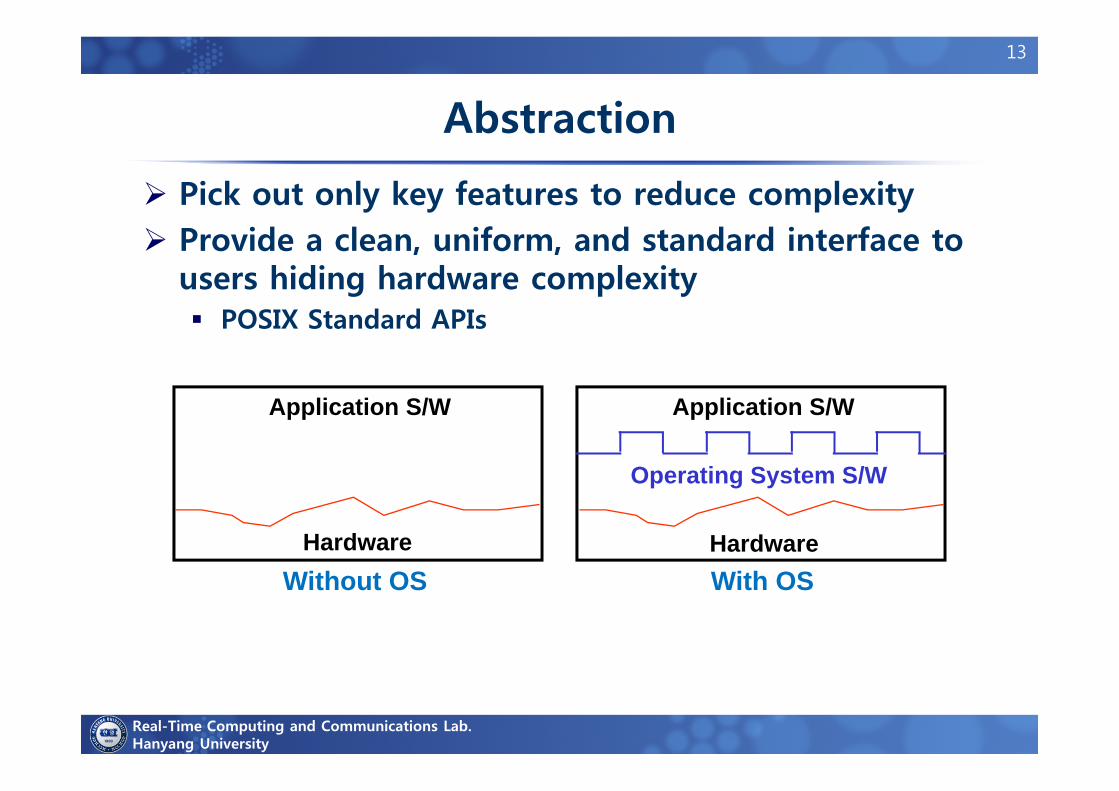
Abstraction
Pick out only key features to reduce complexity Provide a clean, uniform, and standard interface to
users hiding hardware complexity POSIX Standard APIs
Application S/W
Hardware
Application S/W
Operating System S/W
HardwareWithout OS With OS
14
14
Real-Time Computing and Communications Lab.Hanyang University
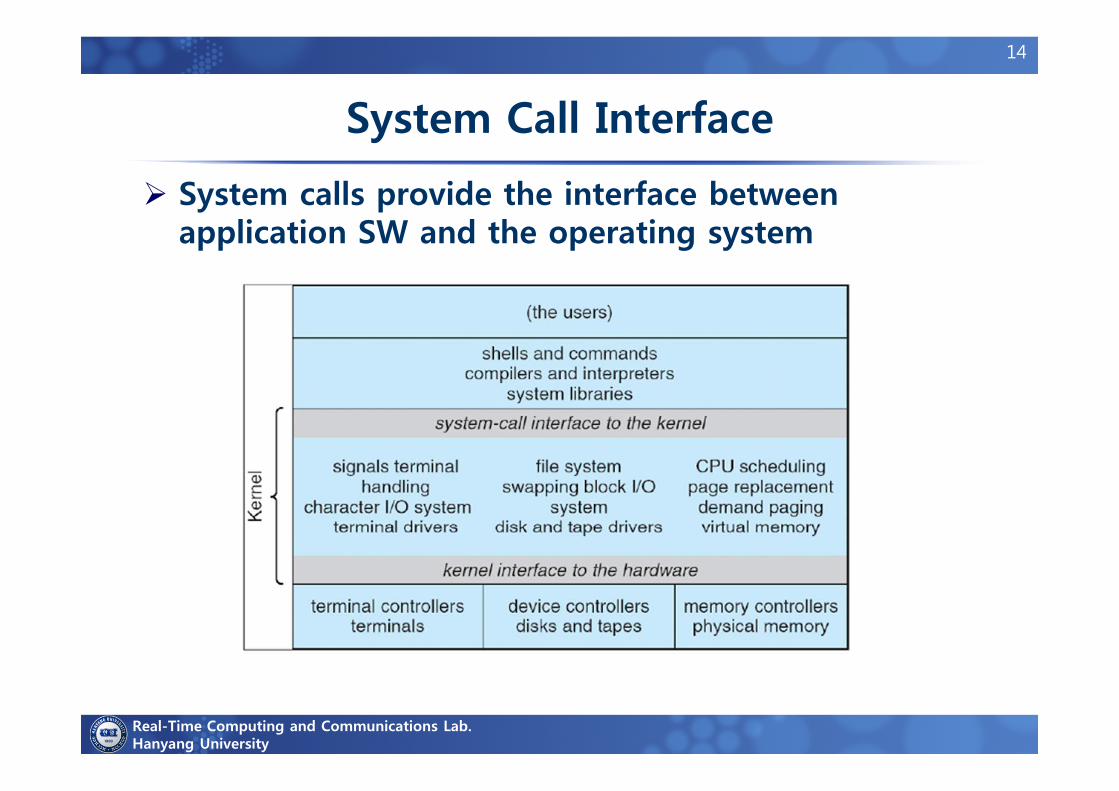
System Call Interface
System calls provide the interface between application SW and the operating system
15
15
Real-Time Computing and Communications Lab.Hanyang University
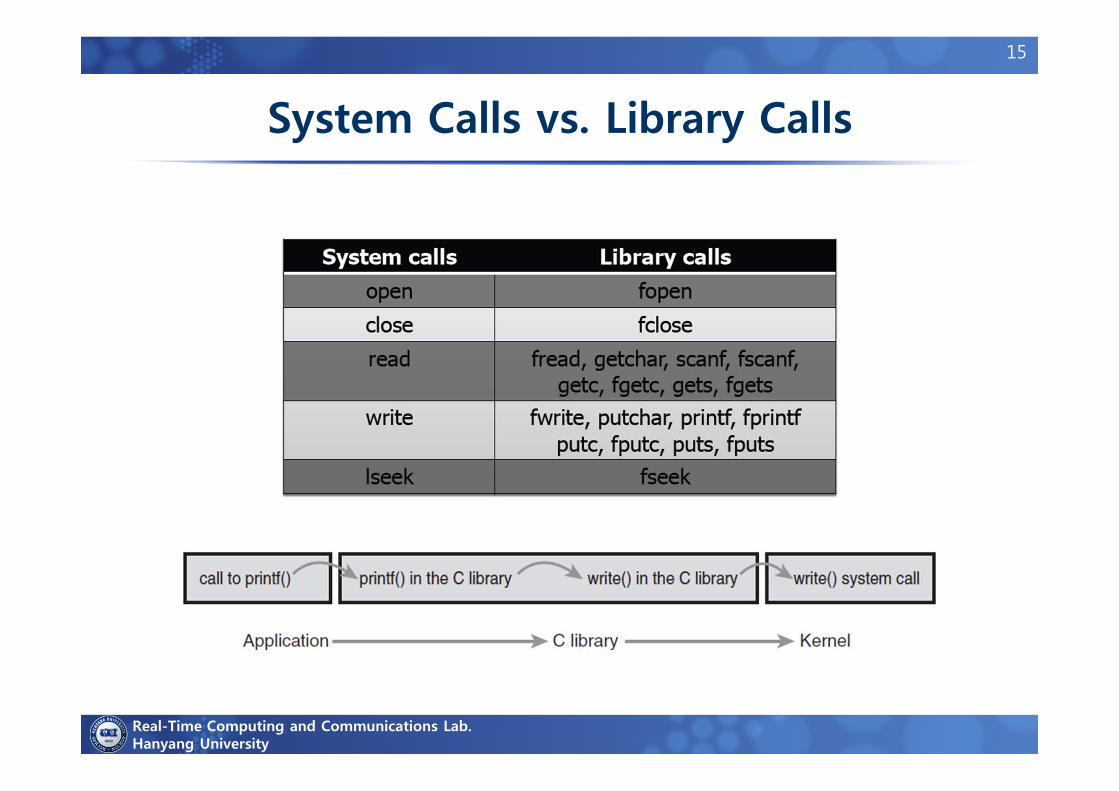
System Calls vs. Library Calls
16
16
Real-Time Computing and Communications Lab.Hanyang University
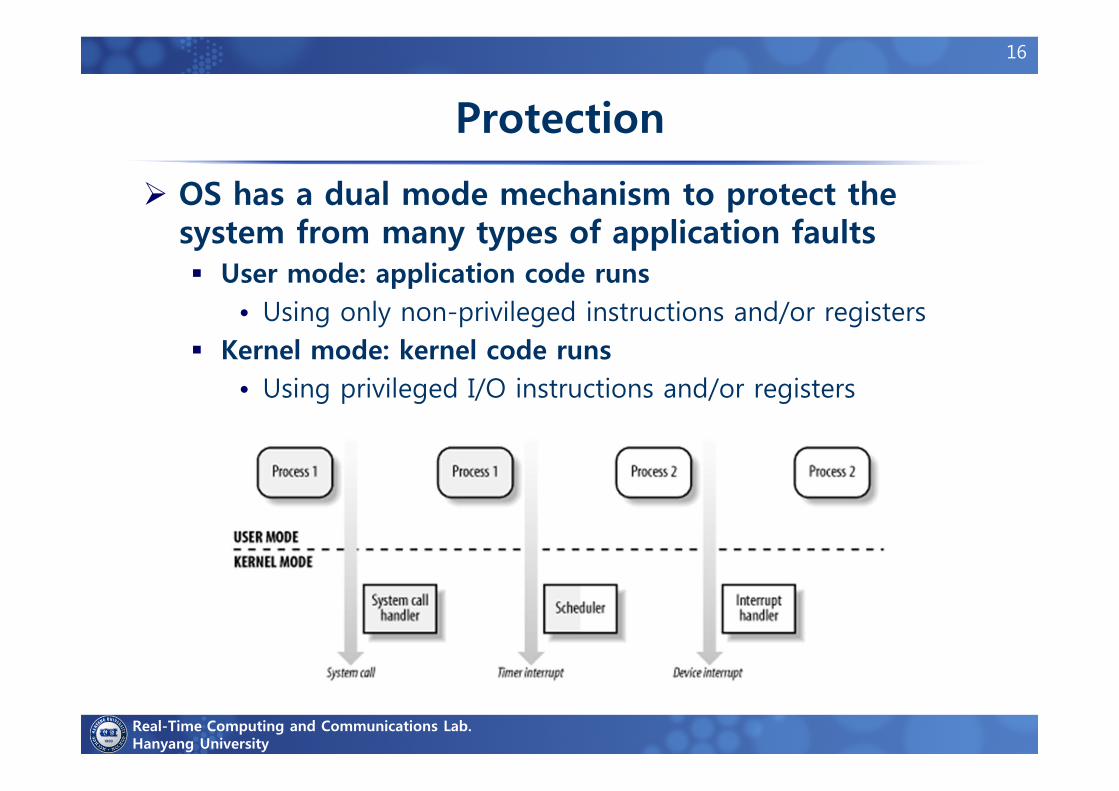
Protection
OS has a dual mode mechanism to protect the system from many types of application faults User mode: application code runs
• Using only non-privileged instructions and/or registers Kernel mode: kernel code runs
• Using privileged I/O instructions and/or registers
17
17
Real-Time Computing and Communications Lab.Hanyang University
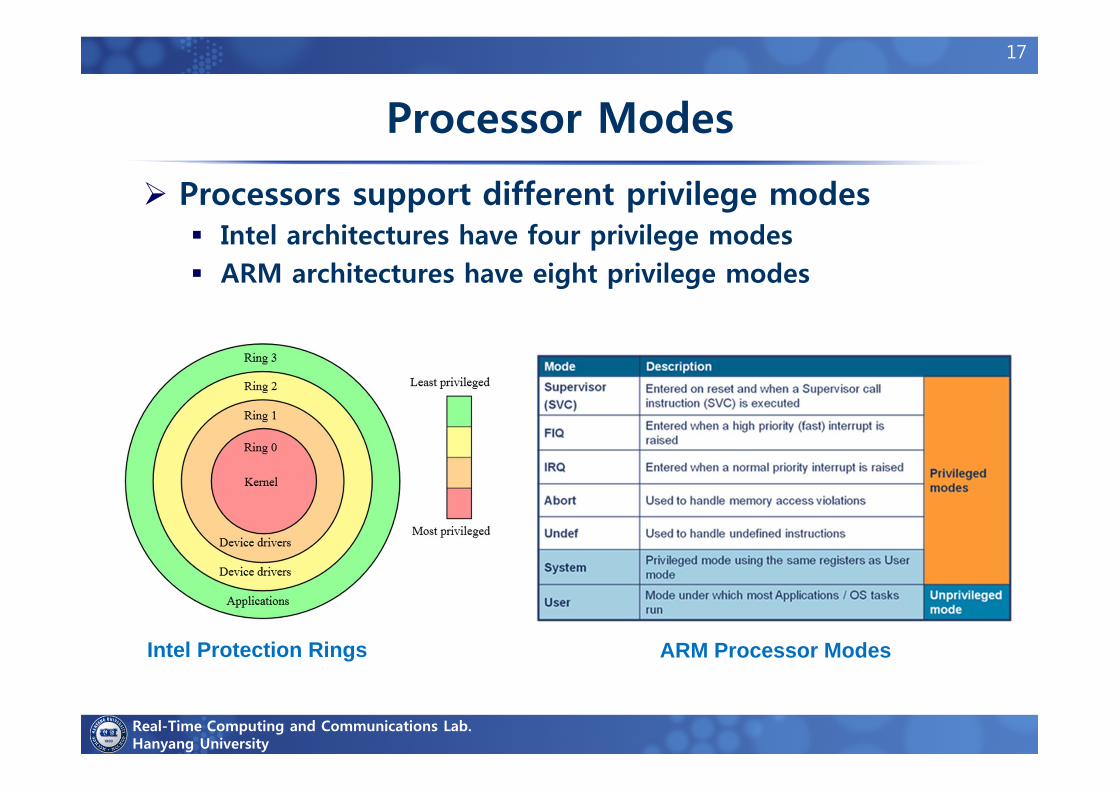
Processor Modes
Processors support different privilege modes Intel architectures have four privilege modes ARM architectures have eight privilege modes
Intel Protection Rings ARM Processor Modes
18
18
Real-Time Computing and Communications Lab.Hanyang University
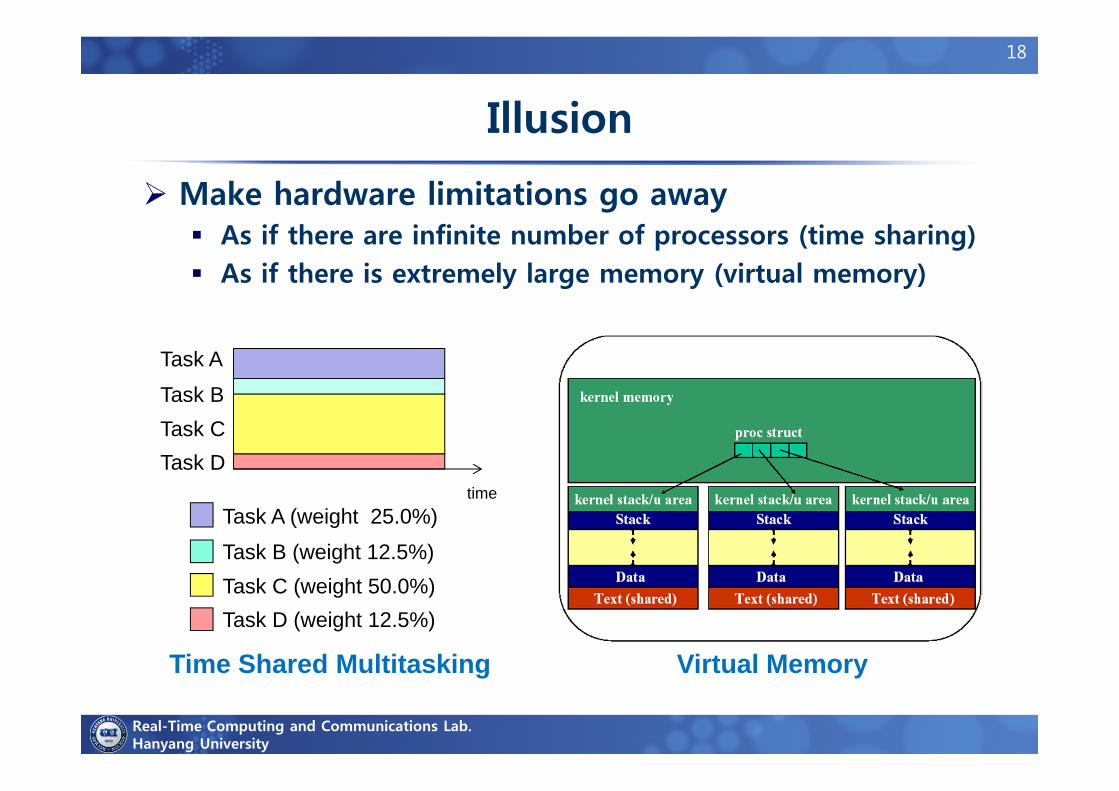
Illusion
Make hardware limitations go away As if there are infinite number of processors (time sharing) As if there is extremely large memory (virtual memory)
time
Task A
Task BTask CTask D
Task A (weight 25.0%)
Task B (weight 12.5%)Task C (weight 50.0%)Task D (weight 12.5%)
Time Shared Multitasking Virtual Memory
Real-Time Computing and Communications Lab.Hanyang University
Dual Mode Operation
20
20
Real-Time Computing and Communications Lab.Hanyang University
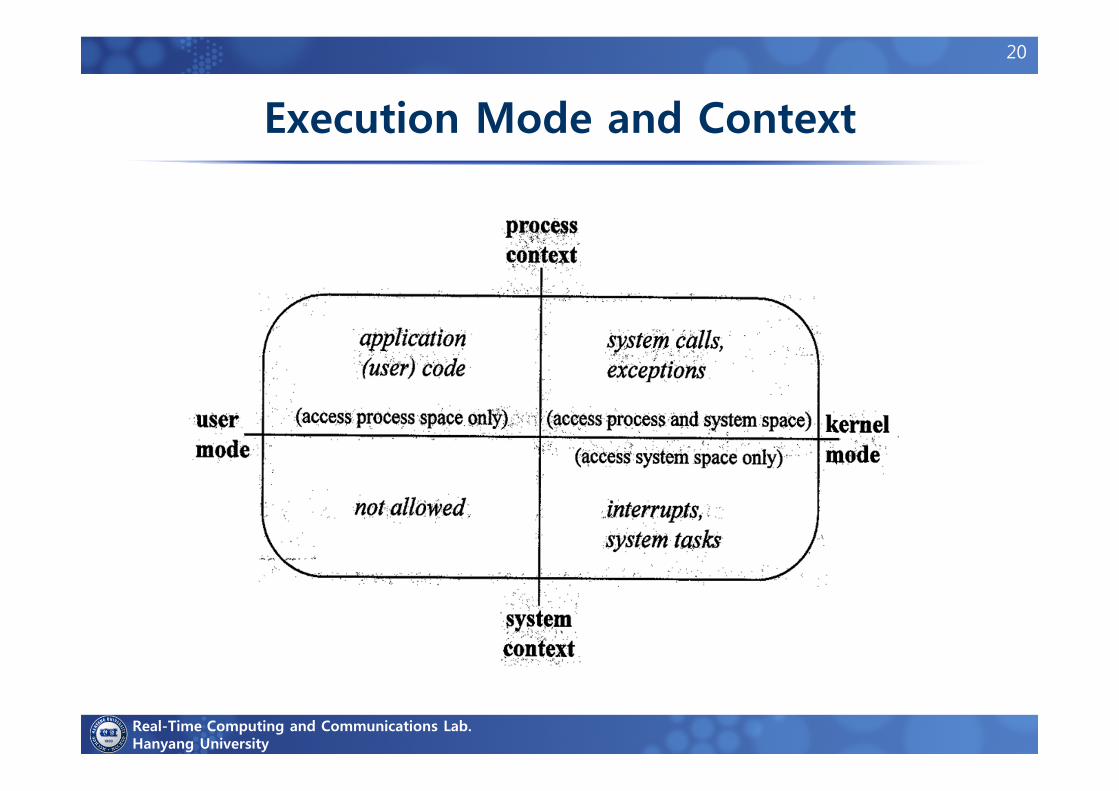
Execution Mode and Context
21
21
Real-Time Computing and Communications Lab.Hanyang University
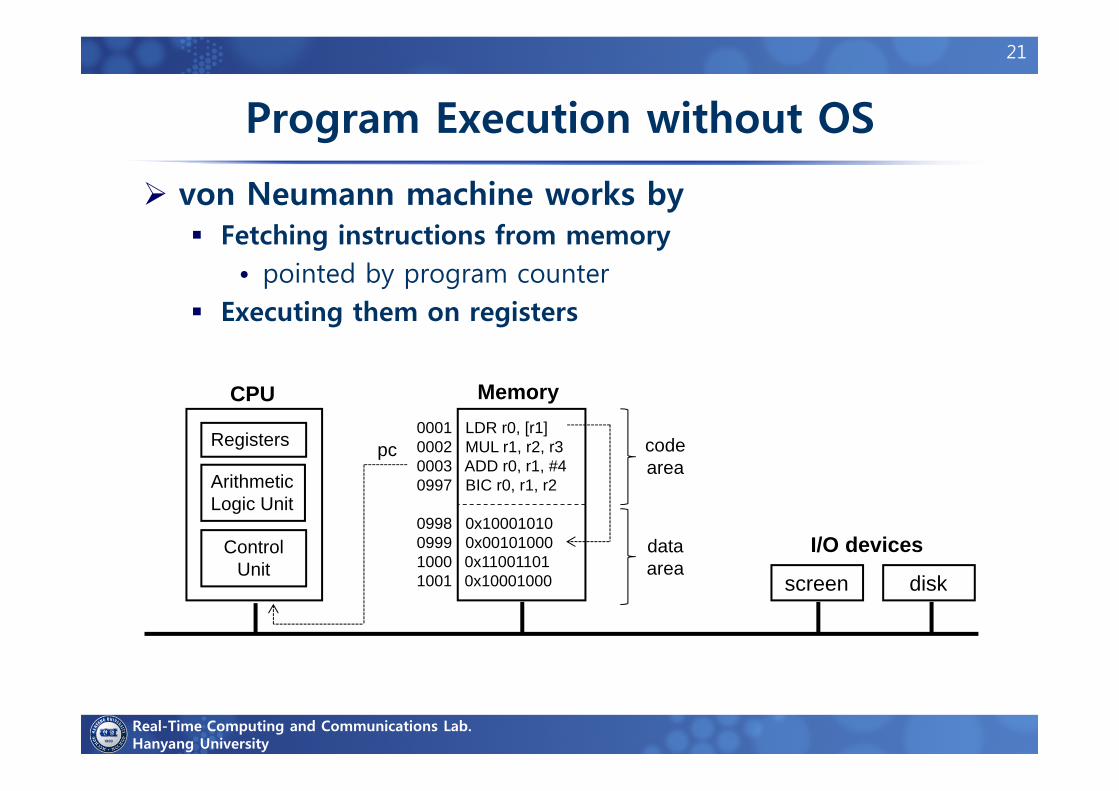
Program Execution without OS
von Neumann machine works by Fetching instructions from memory
• pointed by program counter Executing them on registers
ArithmeticLogic Unit
Registers
ControlUnit
MemoryCPU0001 LDR r0, [r1]0002 MUL r1, r2, r30003 ADD r0, r1, #40997 BIC r0, r1, r2
0998 0x100010100999 0x001010001000 0x110011011001 0x10001000
I/O devices
screen disk
pc codearea
dataarea
22
22
Real-Time Computing and Communications Lab.Hanyang University
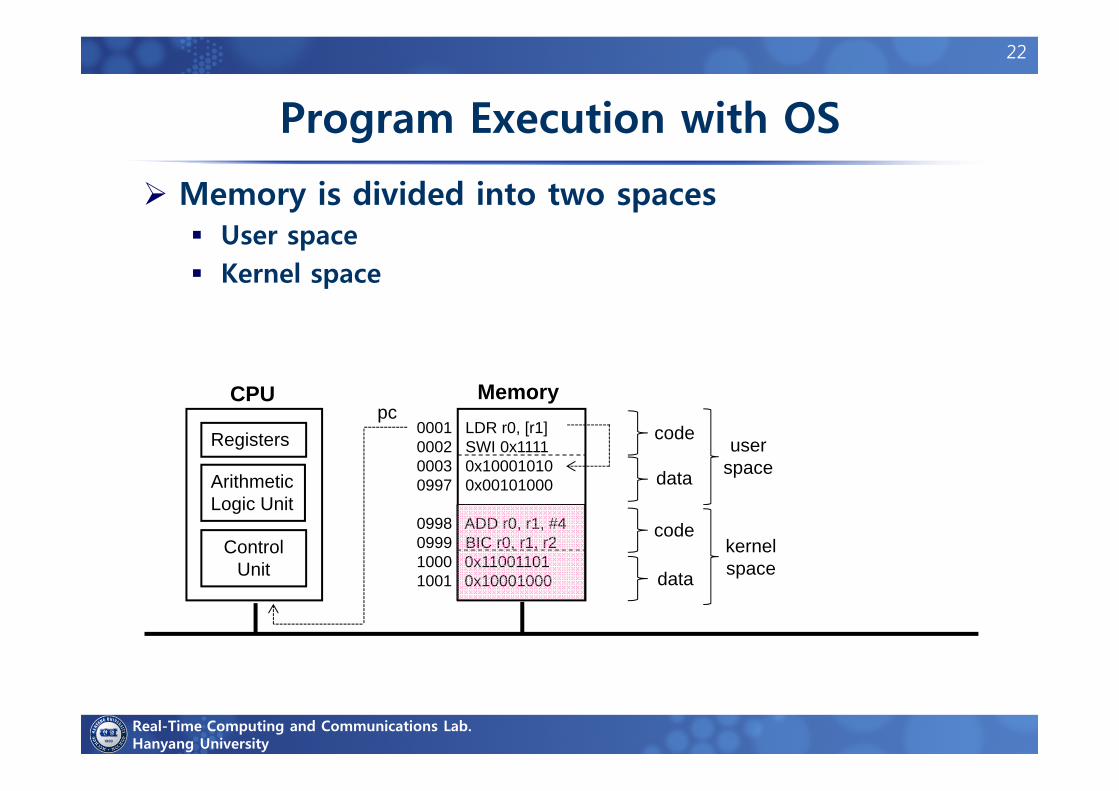
Program Execution with OS
Memory is divided into two spaces User space Kernel space
ArithmeticLogic Unit
Registers
ControlUnit
MemoryCPU0001 LDR r0, [r1]0002 SWI 0x11110003 0x100010100997 0x00101000
0998 ADD r0, r1, #40999 BIC r0, r1, r21000 0x110011011001 0x10001000
pc
userspace
kernelspace
code
data
code
data
23
23
Real-Time Computing and Communications Lab.Hanyang University
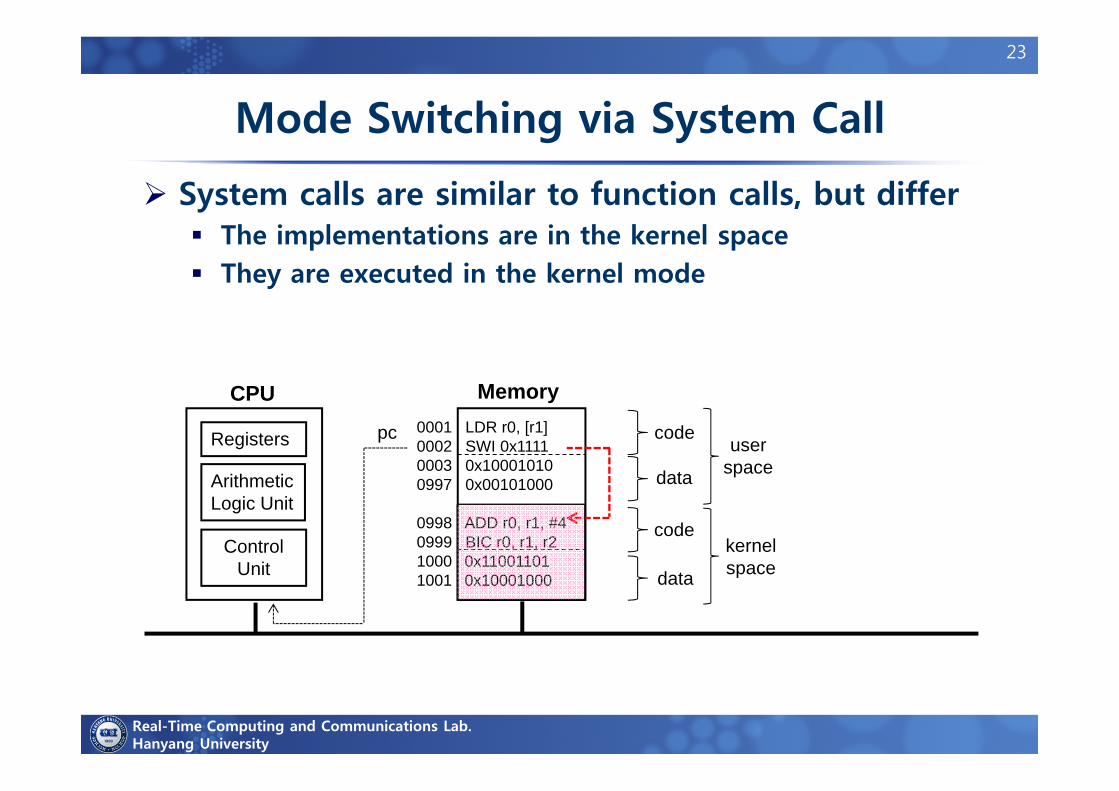
Mode Switching via System Call
System calls are similar to function calls, but differ The implementations are in the kernel space They are executed in the kernel mode
ArithmeticLogic Unit
Registers
ControlUnit
MemoryCPU0001 LDR r0, [r1]0002 SWI 0x11110003 0x100010100997 0x00101000
0998 ADD r0, r1, #40999 BIC r0, r1, r21000 0x110011011001 0x10001000
pcuser
space
kernelspace
code
data
code
data
24
24
Real-Time Computing and Communications Lab.Hanyang University
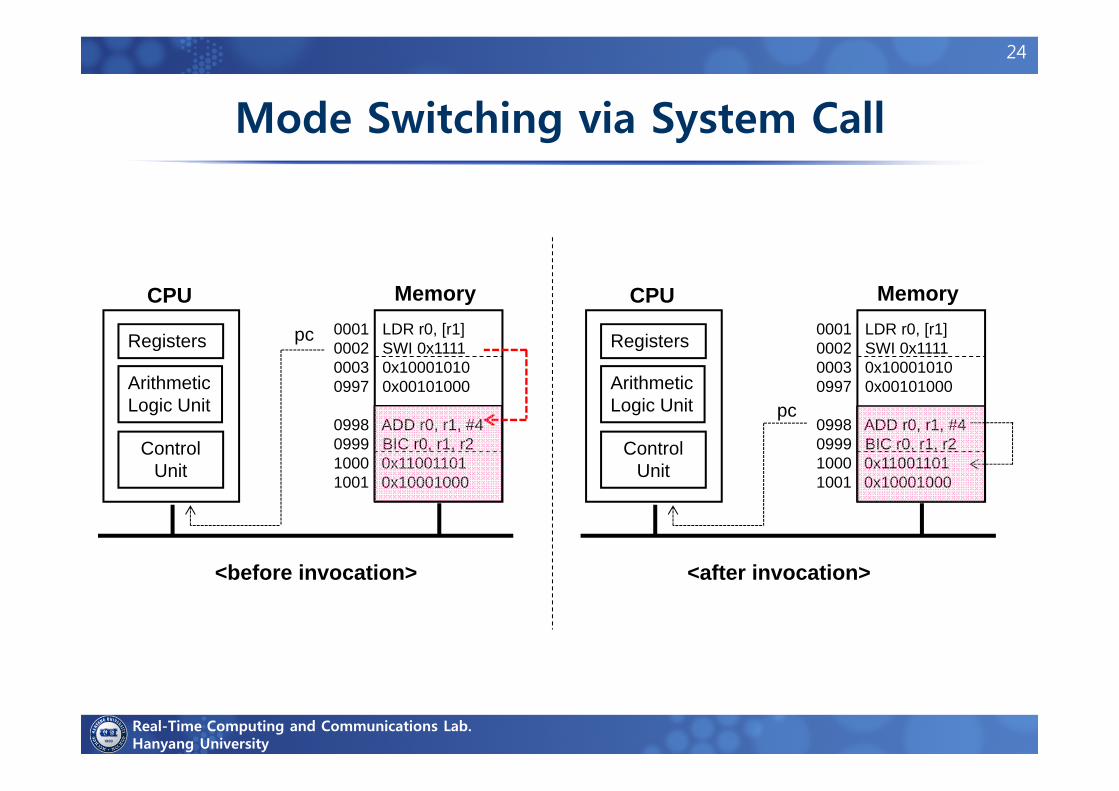
Mode Switching via System Call
ArithmeticLogic Unit
Registers
ControlUnit
MemoryCPU0001 LDR r0, [r1]0002 SWI 0x11110003 0x100010100997 0x00101000
0998 ADD r0, r1, #40999 BIC r0, r1, r21000 0x110011011001 0x10001000
pc
ArithmeticLogic Unit
Registers
ControlUnit
MemoryCPU0001 LDR r0, [r1]0002 SWI 0x11110003 0x100010100997 0x00101000
0998 ADD r0, r1, #40999 BIC r0, r1, r21000 0x110011011001 0x10001000
pc
<before invocation> <after invocation>
25
25
Real-Time Computing and Communications Lab.Hanyang University
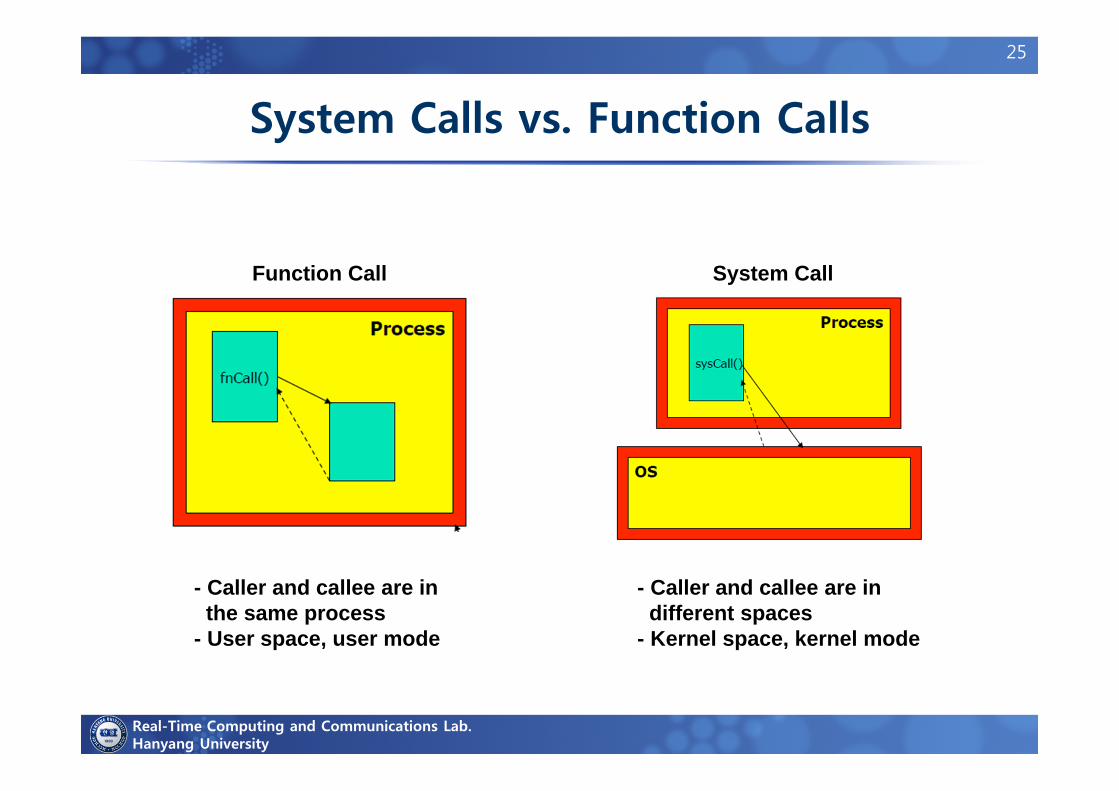
System Calls vs. Function Calls
Function Call System Call
- Caller and callee are in the same process
- User space, user mode
- Caller and callee are in different spaces
- Kernel space, kernel mode
26
26
Real-Time Computing and Communications Lab.Hanyang University
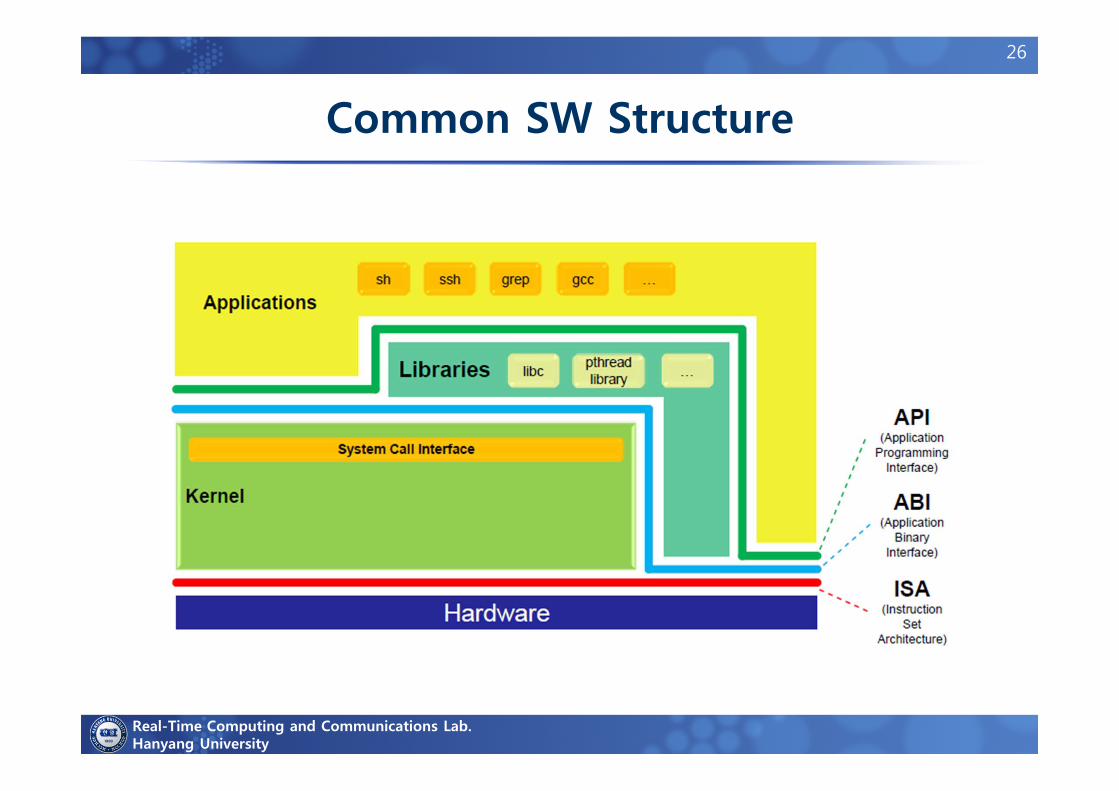
Common SW Structure
Real-Time Computing and Communications Lab.Hanyang University
OS is a Reusable SW Platform
28
28
Real-Time Computing and Communications Lab.Hanyang University
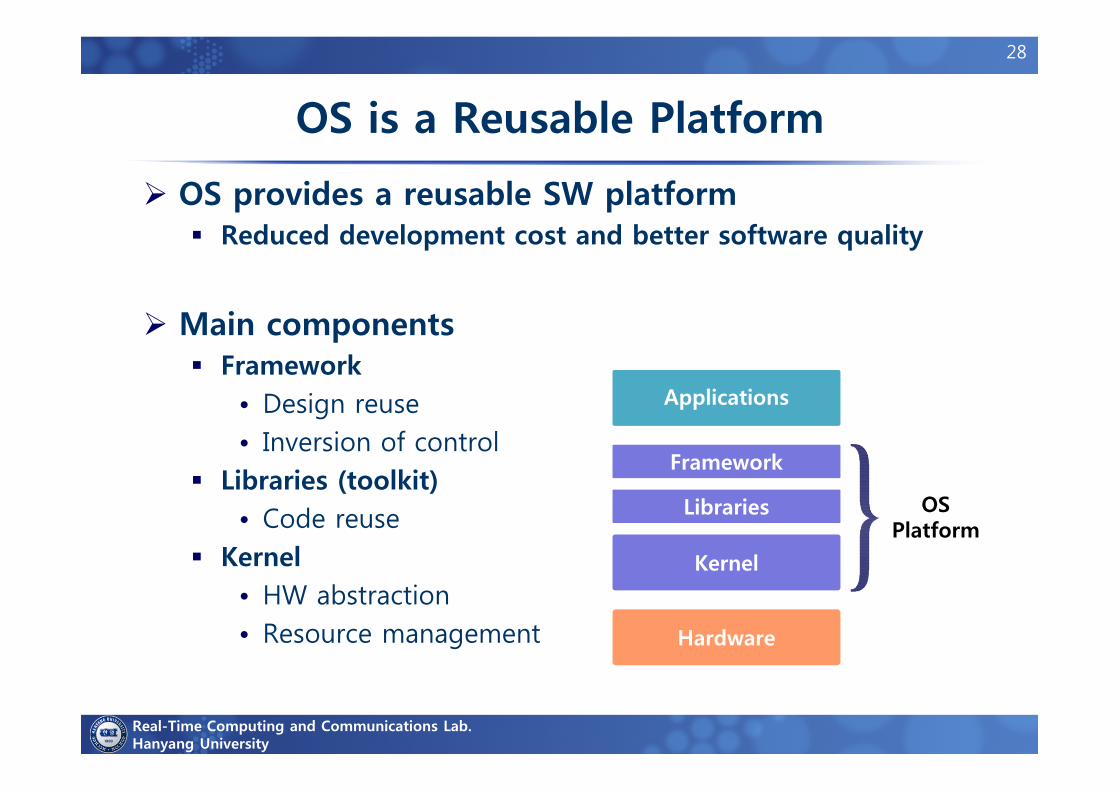
OS is a Reusable Platform
OS provides a reusable SW platform Reduced development cost and better software quality
Main components Framework
• Design reuse• Inversion of control
Libraries (toolkit)• Code reuse
Kernel• HW abstraction• Resource management
Applications
Kernel
Hardware
Libraries
Framework
OSPlatform
29
29
Real-Time Computing and Communications Lab.Hanyang University
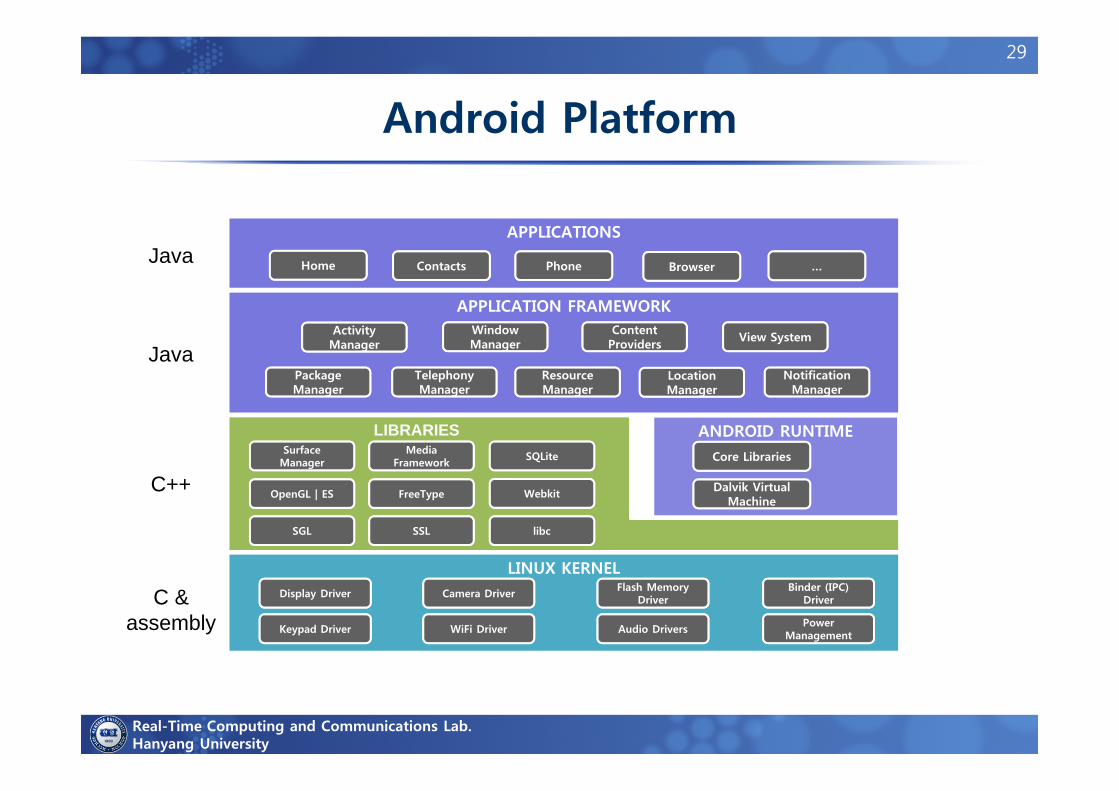
Android Platform
APPLICATIONS
Home Contacts Phone Browser …
APPLICATION FRAMEWORK
gActivityManager g
Window Manager
gPackage Manager
Content Providers
View System
gTelephony Manager g
Resource Manager g
Location Manager g
Notification Manager
Surface Manager
SSL
FreeType
libc
Webkit
SQLiteMedia
Framework
OpenGL | ES
SGL
ANDROID RUNTIME
Core Libraries
Dalvik Virtual Machine
LINUX KERNELDisplay Driver
Keypad Driver WiFi Driver Audio DriversPower
Management
Camera DriverFlash Memory
DriverBinder (IPC)
Driver
LIBRARIES
Java
Java
C++
C &assembly
30
30
Real-Time Computing and Communications Lab.Hanyang University
Framework
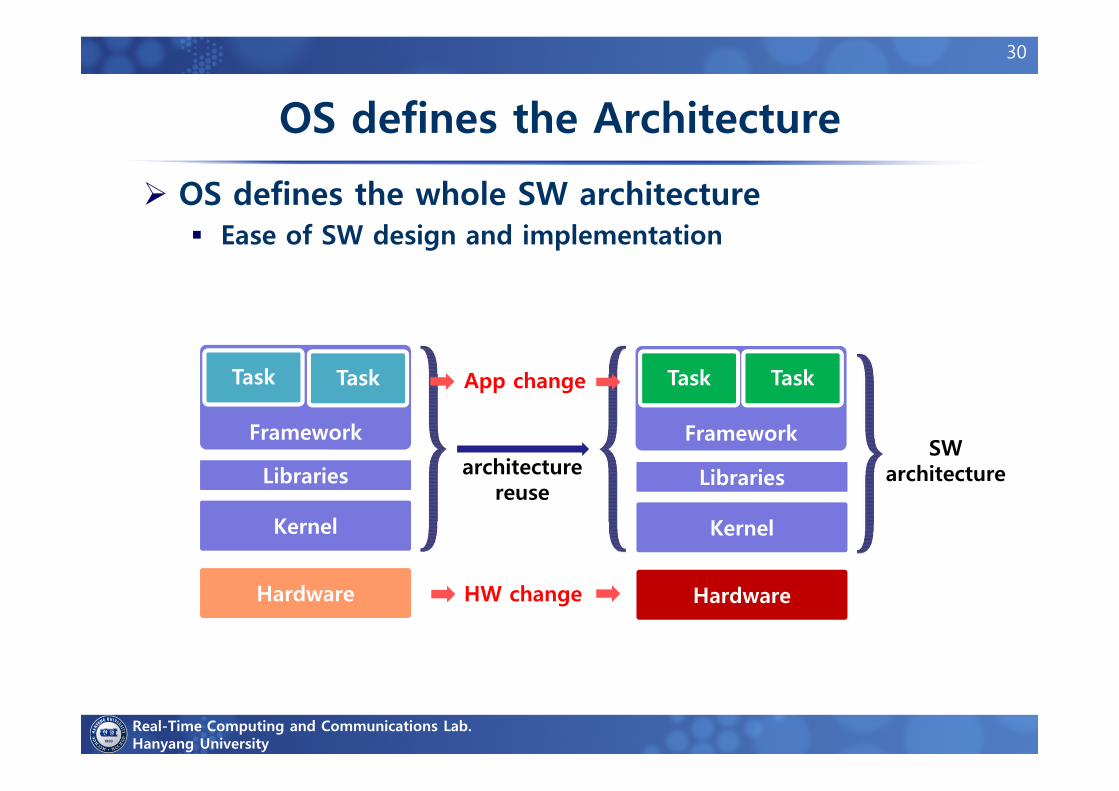
OS defines the Architecture
OS defines the whole SW architecture Ease of SW design and implementation
Task
Kernel
Hardware
Libraries
Kernel
Hardware
LibrariesSW
architecturearchitecturereuse
Task
HW change
App change
Framework
Task Task
31
31
Real-Time Computing and Communications Lab.Hanyang University
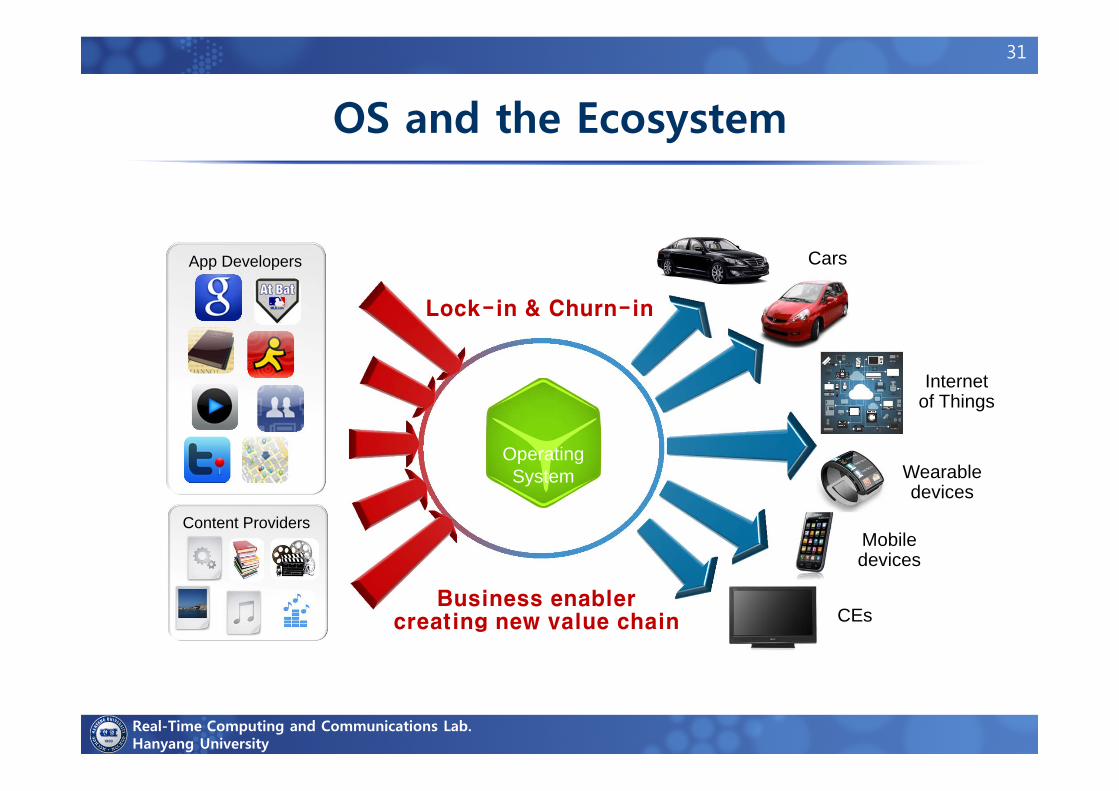
OS and the Ecosystem
App Developers Cars
Business enablercreating new value chain
Content Providers
Lock-in & Churn-in
OperatingSystem
CEs
Mobiledevices
Wearabledevices
Internetof Things
Real-Time Computing and Communications Lab.Hanyang University
What is RTOS?
33
33
Real-Time Computing and Communications Lab.Hanyang University
RTOS does not mean “fast”RTOS does not mean “fast”• RTOS adds runtime overheads• Slightly slower performance than OS-
less systems
RTOS does mean “deterministic”RTOS does mean “deterministic”• Guarantees “worst case” times• Better performance than GPOS
34
34
Real-Time Computing and Communications Lab.Hanyang University
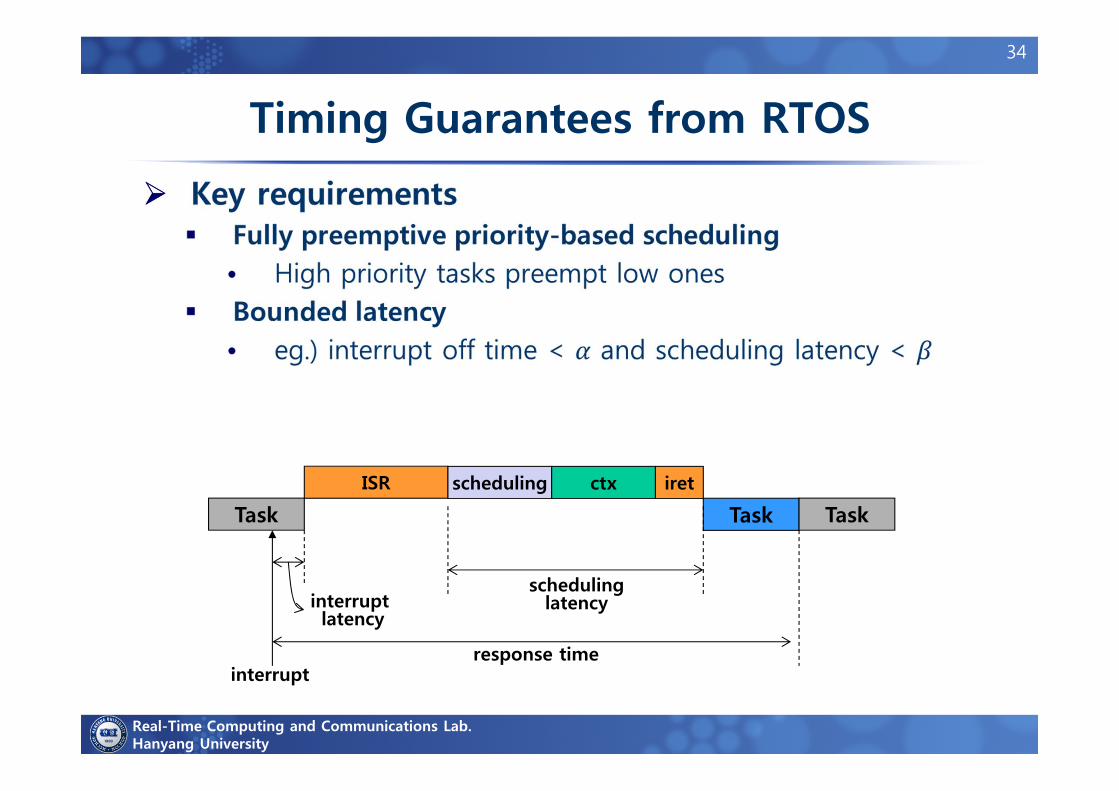
Timing Guarantees from RTOS
Task
interrupt
ISR scheduling ctx iret
Task Task
interrupt latency
schedulinglatency
response time
35
35
Real-Time Computing and Communications Lab.Hanyang University
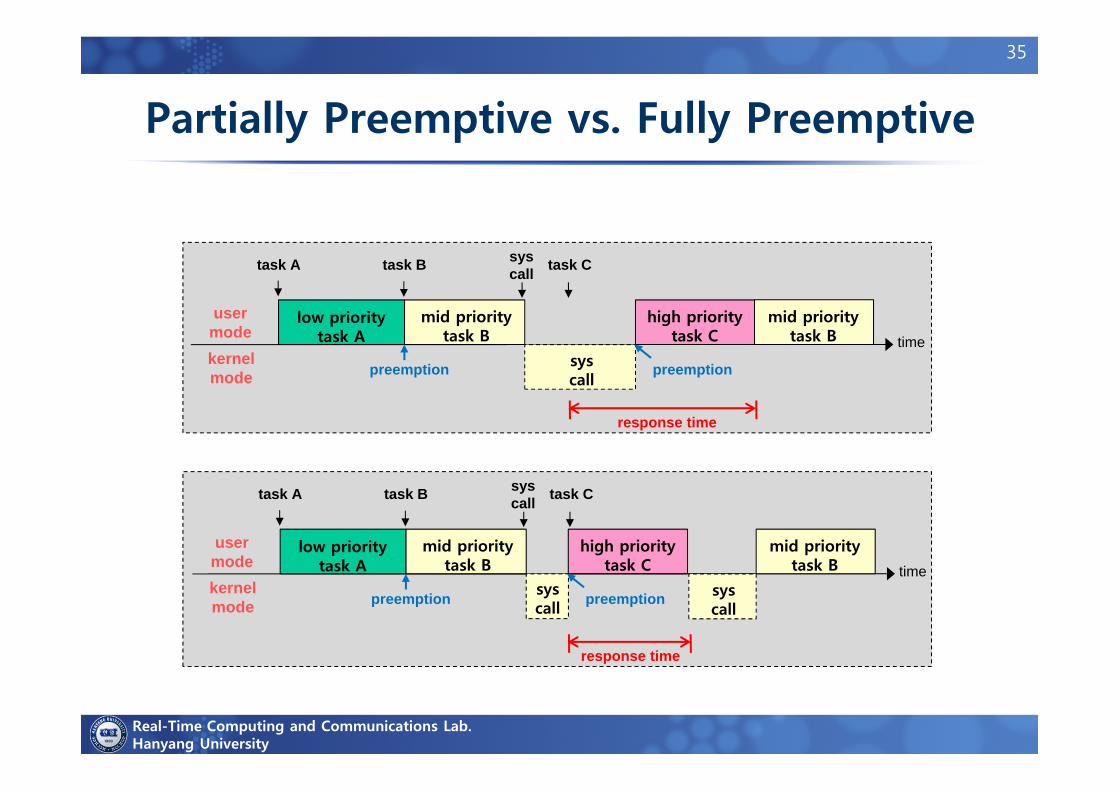
Partially Preemptive vs. Fully Preemptive
timelow priority
task Amid priority
task Bhigh priority
task Cmid priority
task Busermodekernelmode
task A
preemption
syscalltask B task C
preemptionsyscall
timelow priority
task Amid priority
task Bhigh priority
task Cmid priority
task Busermodekernelmode
task A
preemption
syscalltask B task C
preemptionsyscall
syscall
response time
response time
36
36
Real-Time Computing and Communications Lab.Hanyang University
Commercial RTOSes
Commercial RTOSes QNX, VxWorks, pSOS, VRTX, Nucleus
Features Multithreading, real-time synchronization and POSIX APIs Lightweight kernel
• Even scaled down to fit in the ROM of the system Modularized structure
• Minimum kernel + service components Responsiveness
• Minimal interrupt and switching latency
37
37
Real-Time Computing and Communications Lab.Hanyang University
Linux for Real-Time?
Linux is a general purpose OS Aimed at high performance and stability
Old Linux did not support Full preemption and bounded latency
Current Linux supports Deterministic scheduler (SCHED_FIFO and EDF) Priority inheritance mutexes Lockable memory (disabling demand paging) High resolution timers? Bounded latency inside the kernel? Boot-up time
38
38
Real-Time Computing and Communications Lab.Hanyang University
Linux Variants for RT
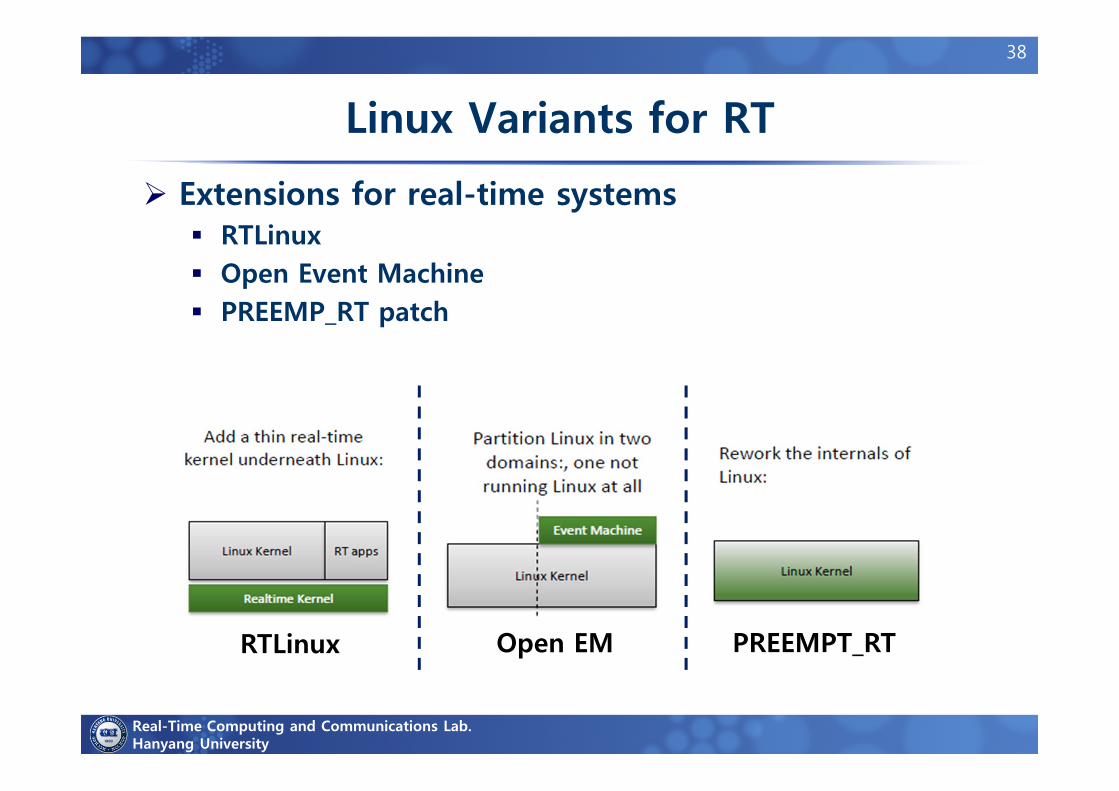
Extensions for real-time systems RTLinux Open Event Machine PREEMP_RT patch
RTLinux Open EM PREEMPT_RT
39
39
Real-Time Computing and Communications Lab.Hanyang University
RTLinux
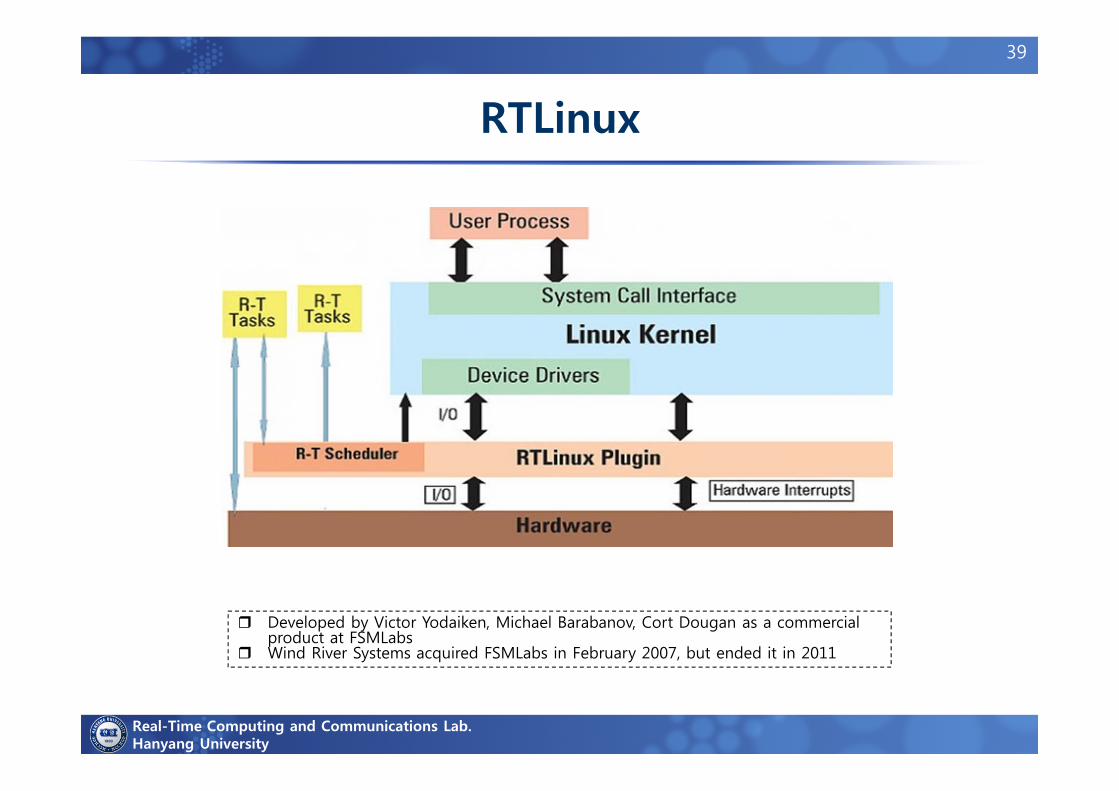
Developed by Victor Yodaiken, Michael Barabanov, Cort Dougan as a commercial product at FSMLabs
Wind River Systems acquired FSMLabs in February 2007, but ended it in 2011
40
40
Real-Time Computing and Communications Lab.Hanyang University
Open Event Machine
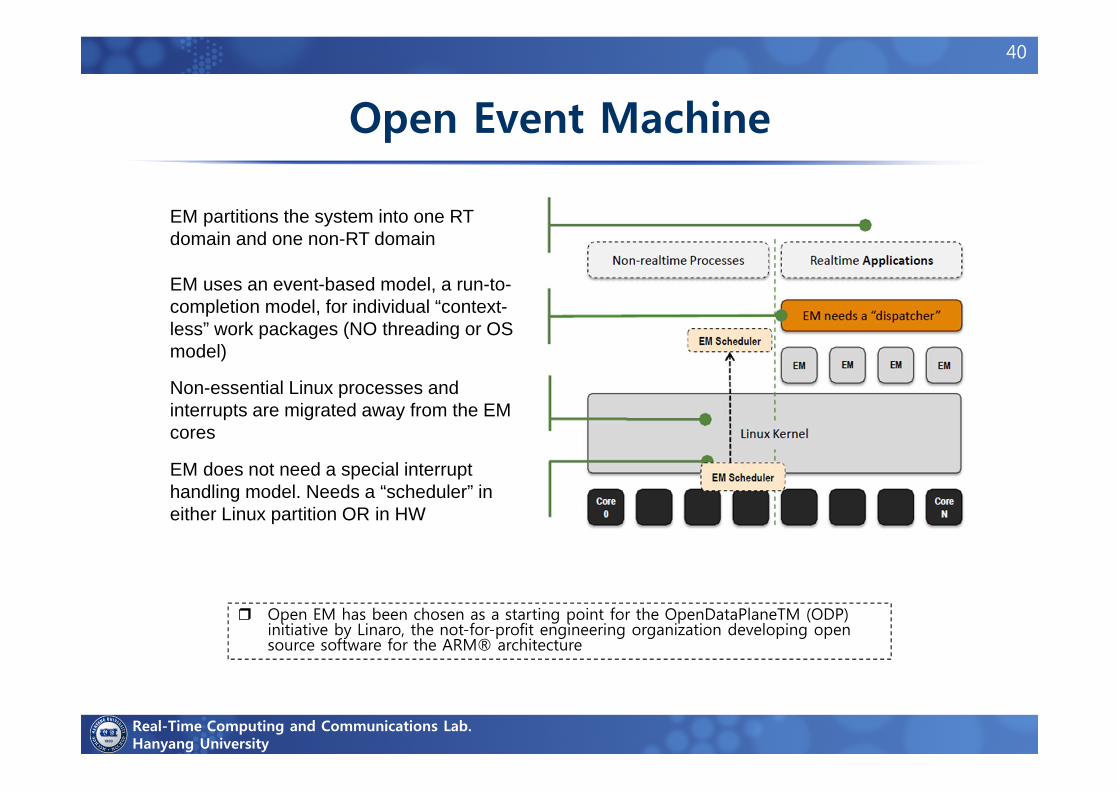
EM partitions the system into one RT domain and one non-RT domain
EM uses an event-based model, a run-to-completion model, for individual “context-less” work packages (NO threading or OS model)
EM does not need a special interrupt handling model. Needs a “scheduler” in either Linux partition OR in HW
Non-essential Linux processes and interrupts are migrated away from the EM cores
Open EM has been chosen as a starting point for the OpenDataPlaneTM (ODP) initiative by Linaro, the not-for-profit engineering organization developing open source software for the ARM® architecture
41
41
Real-Time Computing and Communications Lab.Hanyang University
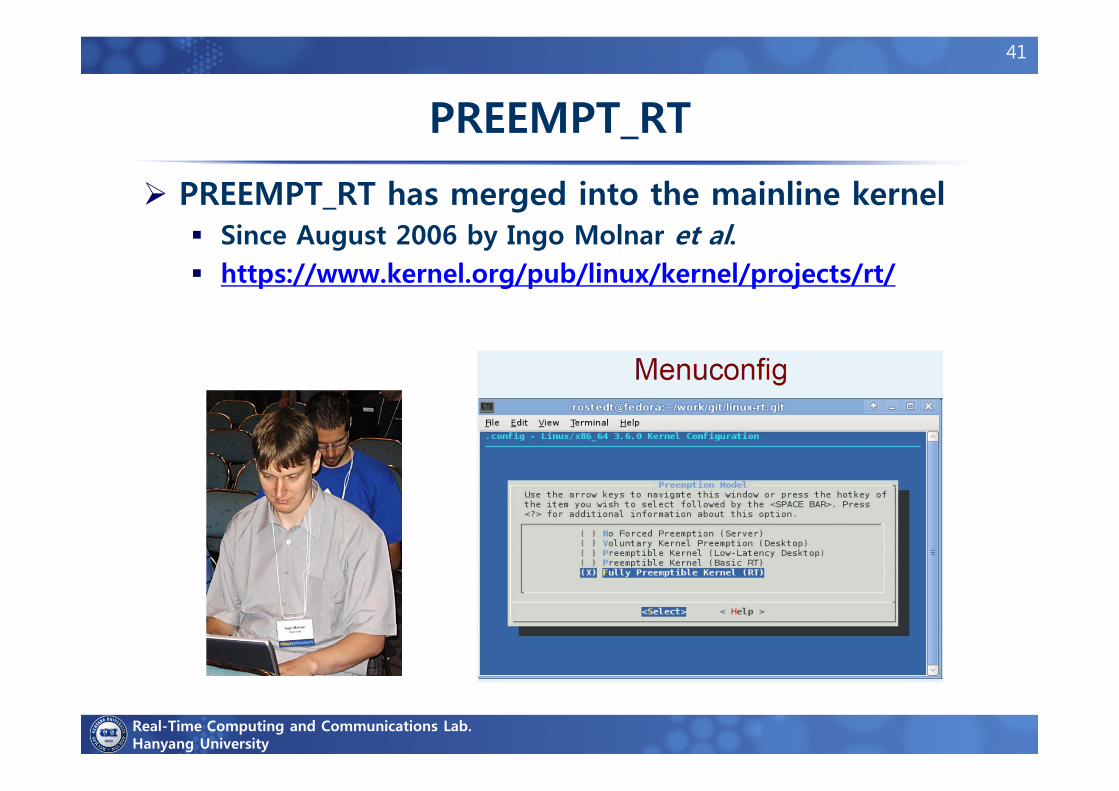
PREEMPT_RT
PREEMPT_RT has merged into the mainline kernel Since August 2006 by Ingo Molnar et al. https://www.kernel.org/pub/linux/kernel/projects/rt/
42
42
Real-Time Computing and Communications Lab.Hanyang University
PREEMPT_RT
Features Preemptible critical sections Preemptible interrupt handlers Priority inheritance for in-kernel spinlocks and semaphores Deferred operations Some latency-reduction measures
Work is still going on
43
43
Real-Time Computing and Communications Lab.Hanyang University
Linux Boot-up Time
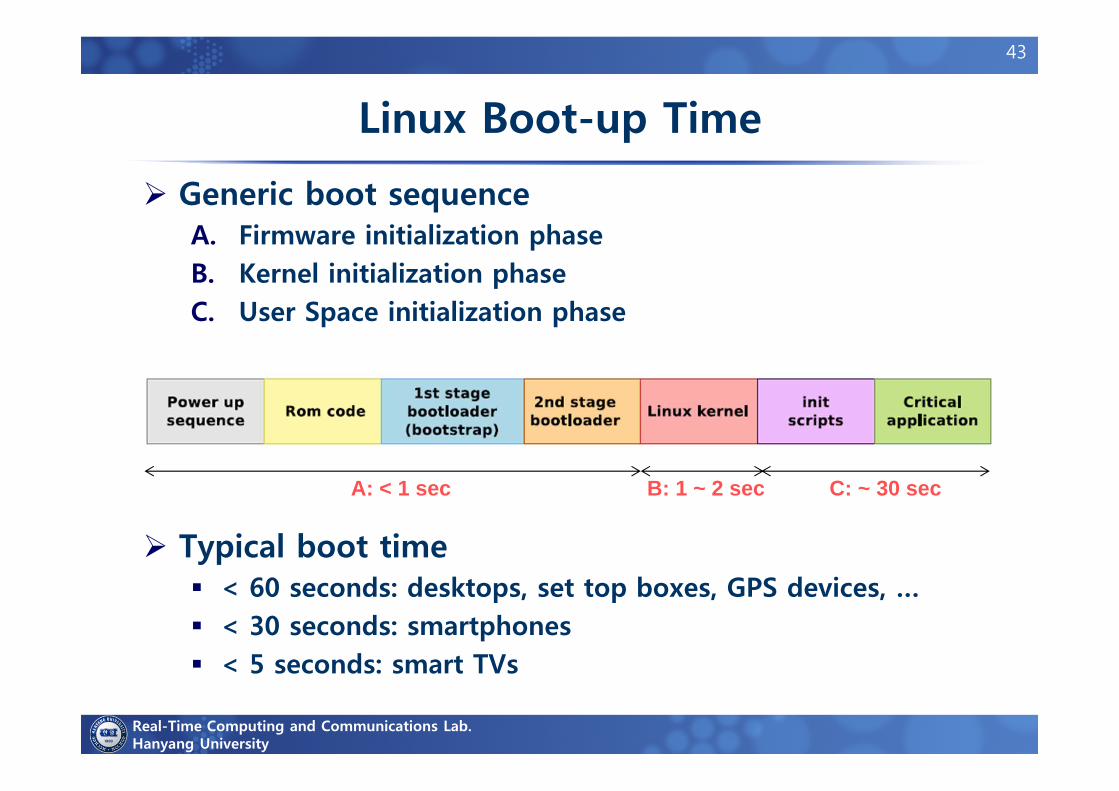
Generic boot sequenceA. Firmware initialization phaseB. Kernel initialization phaseC. User Space initialization phase
Typical boot time < 60 seconds: desktops, set top boxes, GPS devices, … < 30 seconds: smartphones < 5 seconds: smart TVs
A: < 1 sec B: 1 ~ 2 sec C: ~ 30 sec
44
44
Real-Time Computing and Communications Lab.Hanyang University
Boot-up Time Reduction
General techniques for boot-up time reduction Optimize each job of the boot sequence See backup slides for details
Snapshot-based techniques Save RAM content to nonvolatile storage before power-off Upon power-on, restore RAM state
Limitations of snapshot approach Stability problem Retake snapshot every time power is turned off Take snapshot only at “stable” state Android adds another SW layer, increasing snapshot size
45
45
Real-Time Computing and Communications Lab.Hanyang University
GPL License Issue
GPL guarantees end users the freedoms to use, study, share (copy), and modify the software Written by Richard Stallman of the Free Software
Foundation (FSF) for the GNU project
Restriction Modified or derived code must be released under GPL
LGPL (Lesser GPL) Library linking is allowed without releasing the code Android uses Bionic libc derived from BSD libc to isolate
apps from GPL and LGPL
46
46
Real-Time Computing and Communications Lab.Hanyang University


















