
Fundamental Principles of Process Control -...
17
Fundamental Principles of Process Control
Transcript of Fundamental Principles of Process Control -...

Fundamental Principles of Process Control
Motivation for Process Control
• Safety First:• people, environment, equipment
• The Profit Motive:• meeting final product specs
• minimizing waste production
• minimizing environmental impact
• minimizing energy use
• maximizing overall production rate

“Loose” Control Costs Money
• It takes more material to make a product thicker, so greatest profit is to operate as close to the minimum thickness constraint as possible without going under
• It takes more processing to remove impurities, so greatest profit is to operate as close to the maximum impurities constraint as you can without going over
3 .6
3 .8
4 .0
4 .2
4 .4
6 0 8 0 1 0 0 1 2 0 1 4 0
P ro ces s : G rav i ty D rai n ed T an k C o n t ro l l er: M an u al M o d e
Mo
re
P
ro
fit
ab
le
Op
er
at
ion
T im e (m in s)
30
40
50
60
70
3 .4
3 .6
3 .8
4 .0
4 .2
8 0 1 0 0 1 2 0 1 4 0 1 6 0
P ro ces s : G rav i ty D rai n ed T an k C o n t ro l l er: M an u al M o d e
Mo
re
P
ro
fit
ab
le
Op
er
at
ion
T im e (m in s)
operating constraint
poor control means
large variability, so
the process must be
operated in a less
profitable regionprocess variable
Examples

Tight Control = Most Profitable Operation
• A well controlled process has less variability in the measured process variable, so the process can be operated close to the profitable constraint
3 .4
3 .6
3 .8
4 .0
4 .2
8 0 1 0 0 1 2 0 1 4 0 1 6 0
P ro ce s s : G ra v i t y D ra i n ed T a n k C o n t ro l l e r : M a n u a l M o d e
Mo
re
P
ro
fit
ab
le
Op
er
at
ion
T im e ( m in s)
30
40
50
60
70
3 .4
3 .6
3 .8
4 .0
4 .2
8 0 1 0 0 1 2 0 1 4 0 1 6 0
P ro c e s s : G ra v i t y D ra i n e d T a n k C o n t ro l l e r : M a n u a l M o d e
Mo
re
P
ro
fit
ab
le
Op
er
at
ion
T im e (m in s)
operating constraint
process variable
tight control permits
operation near the
constraint, which
means more profit

Profitability of the Process Can Be Improved by Reducing Variability in the Control Loop
Loop variabilit y Loop t uned Increased product ion
or qualit y
$

Standard Deviation: Controller Performance Benchmark
0.6 0.8 1 1.2 1.4 1.6
set point
st dev = 0 .025
st dev = 0.1
-3 +3

7
Terminology for Home Heating Control
• Control Objective = Set Point (SP)• System Output (Y)
• PID: Measured Process Variable (PV)• MPC: Controlled Variable (CV)
• System Input (U)• PID: Controller Output (CO or OP)• MPC: Manipulated Variable (MV)
• Disturbances (D)
furnace
temperature
sensor/transmitter
set point
heat loss
(disturbance)
thermostat
controller
valve
TTTC
control
signal
fuel flow
Copyright © 2007 by Control Station, Inc. All Rights Reserved

Automatic Control is Measurement Computation Action
• Is house cooler than set point? ( TSetpoint Thouse > 0 )
Action open fuel valve
• Is house warmer than set point? ( TSetpoint THouse < 0 )
Action close fuel valve
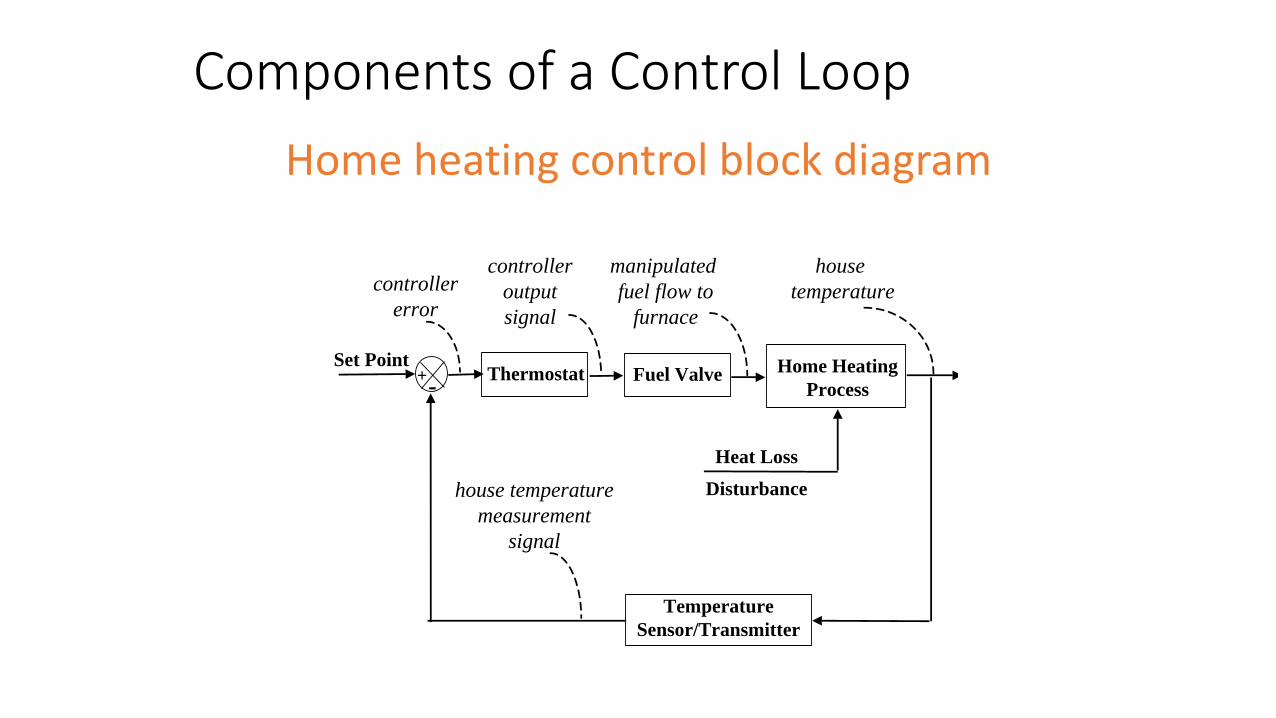
Components of a Control Loop
Home heating control block diagram
Set PointThermostat Home Heating
ProcessFuel Valve
Temperature
Sensor/Transmitter
Heat Loss
Disturbance
+-
house temperature
measurement
signal
controller
error
manipulated
fuel flow to
furnace
house
temperature
controller
output
signal

General Control Loop Block Diagram
Set PointController Process
Final
Control
Element
Measurement
Sensor/Transmitter
Disturbance
feedback
signal
controller
error
manipulated
process
variable
measured
process
variable
controller
output
+-

11
Thought Experiment: Cruise Control in a Car• Control Objective:
• maintain car velocity
• Measured Process Variable (PV): • car velocity (“click rate” from transmission rotation)
• Manipulated Variable: • pedal angle, flow of gas to engine
• Controller Output (CO): • signal to actuator that adjusts gas flow
• Set point (SP): • desired car velocity
• Disturbances (D): • hills, wind, curves, passing trucks....

12
Cruise Control Block Diagram
Magnet and Coil Sensor
set point, SP
(desired speed)
Gas Pedal
Control
Element
disturbances
(hills, wind, etc.)measured “click rate”
PV signal
controller error
e(t) = (SP– PV)
manipulated
gas flow rate
to car engine car speed
controller output, CO
signal to gas pedal
+-+-Car Speed
ProcessCruise
Controller
Copyright © 2007 by Control Station, Inc.
All Rights Reserved

The PID Controller
• is in denominator so smaller values provide a larger weighting to the integral term
• and have units of time and are always positive
where:
OP = controller output signal (also seen as CO in PPC)
OPbias = controller bias or null value
PV = measured process variable
SP = set point
e(t) = controller error = SP – PV
Kc = controller gain (a tuning parameter)
= controller reset time (a tuning parameter)
= controller derivative action (a tuning parameter)
t
PVKdtte
KteKOPOP Dc
I
ccbias
)()(
DI
I
I D

Example: Heated Tank
Ti
wi
To
wo
Heater
Q
• Controlled variable:• To
• Feedback• Measure T0
• Control voltage to heater
TT
VC

Example: Heated Tank
Ti
wi
To
wo
Heater
Q
• Controlled variable:• To
• Feedback• Measure T0
• Control voltage to heater
• Feedforward• Measure Ti
• Control voltage to heater
TT
VC

Other Definitions
• Final Control Element• Usually a valve or pump
• Electricity (to heat or cool)
• Solenoid valve (open or shut)
• SISO• Single input, single output
• Nomenclature
FC
Flow (to be
controlled)
Controller
LT
Level (of liquid)Transmitted (or sensor)

In-Class Activity


















