Functional Linear Models - cuni.czmsekce.karlin.mff.cuni.cz/.../1314z/1314z_Petrasek.pdf · 2015....
32
Functional Linear Models Jakub Petr´ asek Introduction Linear models Motivation Functional linear model Fully Functional Model Functional principal components Estimator based on FPC Scalar Response Model Estimator based on roughness penalty Asymptotic properties Model Diagnostics Bibliography Functional Linear Models Jakub Petr´ asek Department of Probability and Mathematical Statistics Faculty of Mathematics and Physics, Charles University in Prague [email protected] Seminar in Stochastic Modelling in Economics and Finance December 2, 2013
Transcript of Functional Linear Models - cuni.czmsekce.karlin.mff.cuni.cz/.../1314z/1314z_Petrasek.pdf · 2015....

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Functional Linear Models
Jakub Petrasek
Department of Probability and Mathematical StatisticsFaculty of Mathematics and Physics, Charles University in Prague
Seminar in Stochastic Modelling in Economics and Finance
December 2, 2013

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Outline
1 IntroductionLinear modelsMotivationFunctional linear model
2 Fully Functional ModelFunctional principal componentsEstimator based on FPC
3 Scalar Response ModelEstimator based on roughness penaltyAsymptotic properties
4 Model Diagnostics

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Outline
1 IntroductionLinear modelsMotivationFunctional linear model
2 Fully Functional ModelFunctional principal componentsEstimator based on FPC
3 Scalar Response ModelEstimator based on roughness penaltyAsymptotic properties
4 Model Diagnostics
1

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Standard linear model
Model
Y = Xβ + ε,
where
Y ... N x 1 vector,
X ... N x p matrix,
β ... p x 1 patameter vector,
ε ... N x 1 vector of zero mean errors independent of X.
OLS estimatorThe least squares estimator solves normal equations
XTXβ = XTY
For XTX regular, we can explicitly define the OLS estimator
β =(
XTX)−1
XTY
2

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Example
We observe asset price dynamics continuously. The aim is to exploitmarket inefficiencies using prices. A linear model can be of the form
Ptik+τ − Ptik
=
p(∆)∑j=1
∆Ptik−jβj + εi , 1 ≤ k ≤ N.
●
●
●●
●
●
●
●
●●
●●
●
●
●●
●
●
●
●
●●
●
●
●
●
●●●●●
●●
●
●●
●
●
●●●●
●
●
●●
●●
●
●
●
●
●
●
●●
●
●
●●
●
●
●●
●
●
●
●
●
●
●●
●
●●
●
●●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
0 2 4 6 8 10
−0.
010
−0.
005
0.00
00.
005
0.01
00.
015
0.02
0
Linear model (1 minute price prediction based on 5 seconds shots)
Lag in minutes
β
Figure: Estimated linear parameters{βj
}(120 parameters).
3

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Example
We observe asset price dynamics continuously. The aim is to exploitmarket inefficiencies using prices. A linear model can be of the form
Ptik+τ − Ptik
=
p(∆)∑j=1
∆Ptik−jβj + εi , 1 ≤ k ≤ N.
●
●
●●
●
●
●
●
●●
●●
●
●
●●
●
●
●
●
●●
●
●
●
●
●●●●●
●●
●
●●
●
●
●●●●
●
●
●●
●●
●
●
●
●
●
●
●●
●
●
●●
●
●
●●
●
●
●
●
●
●
●●
●
●●
●
●●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
0 2 4 6 8 10
−0.
010
−0.
005
0.00
00.
005
0.01
00.
015
0.02
0
Linear model (1 minute price prediction based on 5 seconds shots)
Lag in minutes
β
Figure: Estimated linear parameters{βj
}(120 parameters).
3

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Example
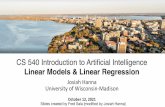
We observe asset price dynamics continuously. The aim is to exploitmarket inefficiencies, i.e. find a prediction model.
Ptik+τ − Ptik
=
p(∆)∑j=1
∆Ptik−jβj + εi , 1 ≤ k ≤ N.
●
●
●●
●
●
●
●
●●
●●
●
●
●●
●
●
●
●
●●
●
●
●
●
●●●●●
●●
●
●●
●
●
●●●●
●
●
●●
●●
●
●
●
●
●
●
●●
●
●
●●
●
●
●●
●
●
●
●
●
●
●●
●
●●
●
●●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
0 2 4 6 8 10
−0.
010
−0.
005
0.00
00.
005
0.01
00.
015
0.02
0
Linear model + Functional Model (1 minute price prediction based on 5 seconds shots)
Lag in minutes
β
Figure: Estimated linear parameters{βj
}(120 parameters). The blue line is
estimated function β(t) of appropriate functional linear model.
4

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Notes to example
Linear modelGrid is chosen arbitrarily.
The more regressors you use the less robust is the model.
For p ≥ N you achieve a perfect fit, which is typically a noisetype function (you have no insight into the true parameters).
The main issue is that the parameter in the model is infinitedimensional objects, but the sample is finite dimensional.
We have to smooth!
Idea in functional modelRestrict to some suitable finite dimensional space.
1 Use principal components of the data.
2 Approximate the data by a rich set of functions and impose aroughness penalty.
5

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Functional versions
Fully functional model
Yi (t) =
∫β(t, s)Xi (s)ds + εi (t).
The estimator is usually based on functional principalcomponents expansion.
Consistency of the estimator can be proved.
Scalar response model
yi =
∫β(s)Xi (s)ds + εi .
Some estimate methods use roughness penalty.Asymptotic properties are known.
Functional response model
Yi (t) = β(t)xids + εi (t).6

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Outline
1 IntroductionLinear modelsMotivationFunctional linear model
2 Fully Functional ModelFunctional principal componentsEstimator based on FPC
3 Scalar Response ModelEstimator based on roughness penaltyAsymptotic properties
4 Model Diagnostics
7

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Notation
Fully functional model
Yi (t) =
∫Xi (s)β(s, t)ds + εi (t).
Model assumptions are analogical to those of a classical linear model
Yi and Xi are observed functions
εi are zero mean functions independent of Xi
We assume that
Xi can be approximated by a set of functions {ηk}Kk=1
Yi can be approximated by a set of functions {θl}Ll=1.
IdeaConsider the estimator in the form
β∗(s, t) =K∑
k=1
L∑l=1
bklηk(s)θl(t).
We reduced the dimension to ”only” K × L number of parameters,{bkl}K ,Lk,l=1.
8

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Normal equations
In vector form we can write
β∗(s, t) = η(s)TBθ(t)
Y(t) =
∫X(s)β(s, t)ds + ε(t) (N × 1)
Y(t) =
∫X(s)η(s)TBθ(t)ds + ε(t)
Y(t) = ZBθ(t) + ε(t).
We multiply the equation by θ(t)T and integrate with respect to t∫Y(t)θT (t)dt =
∫ZBθ(t)θT (t)dt +
∫ε(t)θ(t)Tdt (N × L).
Finally we multiply by ZT , use the fact that error terms are independent ofX and obtain K × L normal equations
ZTZBJ = ZT
∫Y(t)θT (t)dt (K × L).
The procedures is unnecessary complicated, we can use more suitable
approximation!9

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Reminder of FPC
MotivationDecrease the dimension of objects for better manipulation. We aremoving from infinite dimension to p-dimensional with p typicallysingle digit.
Mathematical formulation
Assume we observe x1, . . . , xN zero mean functions (we plan todescribe variance not location). Fix p < N, we search fororthonormal basis u1, . . . , up which minimize
S2 =N∑i=1
∥∥∥∥∥xi −p∑
k=1
〈xi , uk〉 uk
∥∥∥∥∥2
.
10

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Reminder of FPC II
Sample covariance operator
Definition
C (x) = N−1N∑i=1
〈xi , x〉 xi .
Operator is symmetric and positive-definite and admitsdecomposition
C (x) =∞∑k=1
λk 〈x , vk〉 vk ,
where{λk
}are eigenvalues and {vk} are eigenfunctions.
Proposition
The functions u1, . . . , up are equal (up to a sign) to the first peigenfunctions of the sample covariance operator.
11

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Theoretical estimator
Functional principal compomentsAssume that random functions X and Y satisfy expansion
X (s) =∞∑i=1
ξivi (s), Y (t) =∞∑j=1
ζjuj(t),
where {vi} and {uj} are functional principal compoments (FPCs).
Lemma
X ,Y , ε ∈ L2 are zero mean, X and ε independent and
Y (t) =
∫ψ(t, s)X (s)ds + ε(t),
∫ ∫ψ(t, s)2 <∞
ψ(t, s) =∞∑k=1
∞∑l=1
E [ξkζl ]
E ξ2k
uk(t)vl(s), in L2([0, 1]2).
12

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Proof of Lemmaui (t)vj(s), 1 ≤ s, t ≤ 1 form an orthonormal basis in L2([0, 1]2).
ψ(t, s) =∞∑k=1
∞∑l=1
ψkluk(t)vl(s)
and∞∑k=1
∞∑l=1
ψ2kl =
∫ ∫ψ2(t, s)dtds <∞.
We can derive ψkl by the following operations
Y (t) =
∫ψ(t, s)X (s)ds + ε(t)
∞∑j=1
ζjuj(t) =
∫ ∞∑i=1
ξivi (s)∞∑k=1
∞∑l=1
ψkluk(t)vl(s)ds + ε(t)
∞∑j=1
ζjuj(t) =∞∑i=1
ξi
∞∑k=1
ψkiuk(t) + ε(t)
ζl =∞∑i=1
ψliξi + 〈ul , ε(t)〉 , for any l
E [ζlξk ] = ψlkE [ξ2k ], for any l , k
13

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Estimator based on EFPC
E [ξ2k ]
Note the relation between scores and eigenvalues of the covarianceoperator E [ξ2
k ] = λk .
λk = 〈C(vk), vk〉 = 〈E [〈X , vk〉X ] , vk〉 = E 〈X , vk〉2 = E [ξ2k ]
Thus we can estimate E [ξ2k ] by λk .
E [ζlξk ]
Asume that data are approximated by finite sums Xi (s) =∑K
j=1 ξij vj(s)
and Yi (t) =∑L
j=1 ζij uj(t). Proposed estimator for E [ζlξk ] is
σlk =1
N
N∑i=1
〈Xi , vl(s)〉 〈Yi , uk(s)〉 .
14

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Estimator based on EFPC II
ψ(t, s)
If we put the partial estimators together we can define the estimatorfor ψ(t, s)
ψKL(t, s) =K∑
k=1
L∑l=1
λ−1l σlk uk(t)vl(s)
Consistency
We assume that the numbers of principal components K a L arefunctions of the sample size N, then under regularity conditions(details in the reference in the book [3], page. 138)∫ ∫ [
ψKL(t, s)− ψ(t, s)]2
dtdsP→ 0, N(K , L)→∞.
15

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Outline
1 IntroductionLinear modelsMotivationFunctional linear model
2 Fully Functional ModelFunctional principal componentsEstimator based on FPC
3 Scalar Response ModelEstimator based on roughness penaltyAsymptotic properties
4 Model Diagnostics
16

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Notation
ModelRegressors are curves but the responses are scalars
Yi =
∫Xi (s)g(s)ds + εi , i = 1, . . . ,N.
EstimationWe can apply a simplified version of the described estimationprocedure. Or, we can use method based on regularization by aroughness penalty.The idea is to use rich set of base functions but control thesmoothness, i.e. searching for g which minimize
sum of squared errors + roughness penalty.
17

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Formally
Set of base functionsWe search for
gK (s) =K∑
k=1
bkφk(s),
where φk , k = 1, 2, ...,K is Fourier basis, K is assumed to be large.We denote g (m) m-th derivative of g .
Minimization problem
N∑i=1
[Yi −
∫Xi (s)gK (s)ds
]2
+λ
∫g
(m)K (s)2ds.
Using orthogonality of Fourier basis we can rewrite the above formulaas
N∑i=1
[Yi −
K∑k=1
〈Xi , φk〉 bk
]2
+ λK∑
k=1
b2k
∥∥∥φ(m)k
∥∥∥2
.
18

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Smoothing parameter
The estimator gK ,λ depends both on the number of basis function K andon the roughness parameter λ
gK ,λ(s) =K∑
k=1
bkφk(s)
Optimal λ
Let g (−i) be the estimated function without using the i-th observation.
CV (λ) =N∑i=1
[Yi −
∫Xi (s)g (−i)ds
]2
.
Optimal smoothing parameter λ minimize CV (λ) (cross-validation).
Asymptotic propertiesIn order to derive some asymptotic properties we need to restrict the set ofpossible solutions g to a subset of L2 of sufficiently smooth and periodicfunctions.
19

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Sobolev space
Definition (Sobolev space)
Sobolev space Wm,p([0, 1]) is a space of functions u ∈ Lp([0, 1]) whoseweak derivatives up to order m also belong to Lp([0, 1]). m is called theorder of Sobolev space.
Note
Sobolev space uses the notion of weak derivative. v ∈ LP([0, 1]) is called aweak derivative of u ∈ LP([0, 1]) if∫
u(t)φ(t)′dt = −∫
v(t)φ(t)dt
for any infinitely differentiable functions φ with φ(0) = φ(1) = 0.
For p = 2 it is a Hilbert space, usually denoted by Hm([0, 1]) with innerproduct
〈u, v〉 =
∫ (u(t)v(t) +
m∑ν=1
u(ν)(t)v (ν)(t)
)dt.
20

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Asymptotic property
Hmper([0, 1])
We define a set Hmper ([0, 1]) a subset of Hm([0, 1]) with additional
condition that for every 1 ≤ ν ≤ m − 1 u(ν)(0) = u(ν)(1).
Asymptotic property
If g ∈ Hmper ([0, 1]) for m ≥ 2 then
E ‖g∞,λ − g‖2 = OP
(N−1/2 + λ+ N−1λ−1/2m
)
21

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Hybrid estimator
We can combine the FPC method with roughness penalty to getFunctional Principal Component Regression with a roughness penalty.The estimation proceeds as follows
1 Define regressor scores Xik = 〈Xi , φk〉.2 Compute K (>> p) multivariate principal components (note that Xi
are real-valued vectors). Let vj , j = 1, . . .K denote the eigenvectors.
3 We are estimating the linear regression model
Yi =K∑
k=1
Xikbk ,
where we further project the parameters bk on the first p principalcomponents
bk =
p∑j=1
βj vjk .
The minimization is of the form
N∑i=1
[Yi −
p∑j=1
βj
K∑k=1
Xjk vjk
]2
+ λ
[p∑
j=1
βj
K∑k=1
vjk
∫φ
(m)k (s)ds
]2
.
22

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Outline
1 IntroductionLinear modelsMotivationFunctional linear model
2 Fully Functional ModelFunctional principal componentsEstimator based on FPC
3 Scalar Response ModelEstimator based on roughness penaltyAsymptotic properties
4 Model Diagnostics
23

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Overview
The aim is to describe the key diagnostics methods, which includes
Verification of linearity
Independence of residuals and regressors
Stationarity of residuals
Coefficient of determination
Principle
When dealing with linear model we deal with vectors, that are easy toplot (e.g. scatter plots). The main idea is again to move from infinitedimension to finite dimension.Instead of working with raw observations we use estimated scores,that is
Yi (t) =
∫Xi (s)β(s, t)ds + εi (t) −→ ζil =
K∑k=1
ψlkξik + ηl(K ),
24

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Linearity
Recall thatξik = 〈Xi , vk(s)〉 , ζil = 〈Yi , ul(s)〉 ,
For any j and l the dependence between scores should be linear.
Figure: Scatterplots of response and regressor scores. The left one clearly showsquadratic trend.
25

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Residuals
Independence of regrossors
We define residuals as
εi = Yi (t)−∫ψ(t, s)X (s)ds, i = 1, . . . ,N.
We can decompose estimated residuals and verify that the scores areindependent of ξij . Moreover the scores should exhibit equal variance.
Functional coefficient of determinationWe can define pointwise the function
R2(t) =var [E [Y (t)|X (t)]]
var [Y (t)]
and a global measure can be defined as
R2 =
∫R2(t)dt.
26

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Summary
Functional vs classical modelsAvoid linear regression when working with functional data
- Grid is arbitrary- Not robust results- Poor insight into the true dependency
Functional linear models can deal with functional both theresponse and the regressors
Functional models allow smoothness penalties
Estimation procedures
Based on dimension reduction, i.e. instead of (infinitedimension) functions we deal with (finite dimension)coordinates. Main methods
1 Approximate data by empirical functional principal components2 Approximate data by a rich set of basis functions and then
impose a roughness penalty in order to smooth the results3 Functional principal components regression with roughness
penalty27

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
Bibliography
Ramsay J.O. and Silverman B.W.Functional Data Analysis.Springer Series in Statistics, 2005.
Ramsay J.O., Hooker G., and S. Graves.Functional Data Analysis with R and Matlab.Springer Series in Statistics, 2009.
Horvath L. and Kokoszka P.Inference for Functional Data with Applications.Online, 2011.
28

Functional LinearModels
Jakub Petrasek
Introduction
Linear models
Motivation
Functional linearmodel
Fully FunctionalModel
Functionalprincipalcomponents
Estimator basedon FPC
Scalar ResponseModel
Estimator basedon roughnesspenalty
Asymptoticproperties
ModelDiagnostics
Bibliography
...
Thank you for attention
29