Frequency characteristics of railway bridge
14
Frequency characteristics of railway bridge response to moving trains with consideration of train mass Yong Lu a,c,⇑ , Lei Mao a,c , Peter Woodward b,c a Institute for Infrastructure and Environment, School of Engineering, The University of Edinburgh, The Kings Buildings, Edinburgh EH9 3JL, UK b Institute for Infrastructure and Environment, School of Built Environment, Heriot-Watt University, Edinburgh, UK c Joint Research Institute for Civil and Environmental Eng., Edinburgh Research Partnership in Engineering and Mathematics, UK a r t i c l e i n f o Article history: Received 22 January 2012 Accepted 10 April 2012 Available online 20 May 2012 Keywords: Railway bridge Moving train Moving mass Frequency content Critical speed Resonance speed a b s t r a c t The dyna mic resp onse of r ailway brid ges is known to be influence d by a combination of fact ors inc ludin g the bridge natural frequency, train speed, and bridge and carriage lengths. However, the intrinsic rela- tionships among these parameters have seldom been elaborated in common dynamics terms so as to enable more effective implementation in practice. This paper attempts to approach this classic problem fro m a fre que ncy per spe cti ve , by inv est iga tin g int o the fre que ncy cha rac ter ist ics in thebridg e responseas well as in the moving trainloads. In particular, the significance of the so-called ‘‘driving’’ and ‘‘dominant’’ frequencies arising from the moving load is examined. Based on numerical results and a securitization usi ng a ge ner ali sed tra inl oa d pa tte rn, it is de mo nst rat ed tha t the pri ma ry fre que ncy contents in the tra in- load, and consequently in the dynamic response of the bridge, is largely governed by the bridge-to-car- riage length ratio. Namely, for short bridges (with a length ratio below the order of 1.5), well-distributed frequency peaks occur at a number of dominant frequencies, whereas for longer bridges the main fre- quency peak tends to concentrate towards the lowest dominant frequency. Such a characteristic affects directly the resonance condition and resonance speeds for bridges of different length categories, and this observation echoes well the predictions of the resonance severity using a so-called Z -factor. For the spe- cia l case of bri dg e res po nse und er a sin gle car ria ge /ve hic le, theinfluenceof the car ria ge ma ss is examined in association with the concept of critical speed, and the abnormal acceleration spikes that could occur when the vehicle moves at the critical speed is highlighted. 2012 Elsevier Ltd. All rights reserved. 1. Introduction The dynamic response of railway bridges is complicated due to the involvement of moving loads and moving masses. Comparing to road traffic, the trainload excitation is characteri sed by a unique pattern of frequency spectrum, which directly affects the dynamic response of the bridge. Moreover, the dynamic properties of rail- way bridges, especially the natural frequencies of small- to med- ium-size br idg es, can be alt er ed sig nifi can tly due to movin g carriage masses. Numerous publications exist in the literature regarding bridge dyn ami c resp onse and the train –bri dge inte racti ons. It is wel l recognised that the dynamic response of a railway bridge is influ- enced by a combination of factors, chiefly the bridge natural fre- quen cy, train speed, and bridge and carr iage lengths. Howev er, the intrinsic relationships among these parameters have generally been implicitly expresse d through dynamic formulations, whereas spe cific guides for their app lica tion in prac tice are lack ed. For example, it is not straightforward to implement a general recom- mendation that resonance could take place under certain norma- lis ed spe eds, wi tho ut speci fic inf ormation wi th re gar d to the re sonance sev eri ty and an understandi ng of the tre nd of var iat ions. A seemingly effective way of approaching this subject is to re- sort to the frequency analysis of the trainload in conjunction with the frequency characteristics of the responding system. However, studies stemming from a frequency perspective are still limited. Those that fall into this category may be loosely divided into two gro ups, one conc erns the vari atio n of the natu ral frequen cies of the responding bridge during the passage of a laden train/vehicle (e.g. [1–5]), and the othe r dea ls with the freq uenc y cont ents in the trainload excitation and their general effect in the bridge re- sponse (e.g., [5–8]). In particular, it has been demonstrated that, in add ition to the reso nant frequen cies, the prim ary freq uenc ies in the bridge respo nse may be attribut able to (a) the so- calle d ‘‘dr iving freque ncie s’’ associated with the duration of a vehicle crossing the bridge [8], and (b) the so-called ‘‘dominant frequen- cies’’ arising from the repeated loads (hence are re lat ed to the time 0141-0296/$ - see front matter 2012 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/j.engstruct.2012.04.007 ⇑ Corresp ondin g autho r at: Instit ute for Infrast ructu re and Enviro nment, School of Engineering, The University of Edinburgh, The Kings Buildings, Edinburgh EH9 3JL, UK. Tel.: +44 131 6519052; fax: +44 131 6506781. E-mail address: [email protected] (Y. Lu). Engineering Structures 42 (2012) 9–22 Contents lists available at SciVerse ScienceDirect Engine ering Struct ures journal homepage: www.elsevier.com/locate/engstruct
-
Upload
ali-tootia -
Category
Documents
-
view
224 -
download
0
Transcript of Frequency characteristics of railway bridge

7/27/2019 Frequency characteristics of railway bridge
http://slidepdf.com/reader/full/frequency-characteristics-of-railway-bridge 1/14
Frequency characteristics of railway bridge response to moving trains
with consideration of train mass
Yong Lu a,c,⇑, Lei Mao a,c, Peter Woodward b,c
a Institute for Infrastructure and Environment, School of Engineering, The University of Edinburgh, The Kings Buildings, Edinburgh EH9 3JL, UK b Institute for Infrastructure and Environment, School of Built Environment, Heriot-Watt University, Edinburgh, UK c Joint Research Institute for Civil and Environmental Eng., Edinburgh Research Partnership in Engineering and Mathematics, UK
a r t i c l e i n f o
Article history:
Received 22 January 2012
Accepted 10 April 2012
Available online 20 May 2012
Keywords:
Railway bridge
Moving train
Moving mass
Frequency content
Critical speed
Resonance speed
a b s t r a c t
The dynamic response of railway bridges is known to be influenced by a combination of factors including
the bridge natural frequency, train speed, and bridge and carriage lengths. However, the intrinsic rela-
tionships among these parameters have seldom been elaborated in common dynamics terms so as to
enable more effective implementation in practice. This paper attempts to approach this classic problem
from a frequency perspective, by investigating into the frequency characteristics in thebridge response as
well as in the moving trainloads. In particular, the significance of the so-called ‘‘driving’’ and ‘‘dominant’’
frequencies arising from the moving load is examined. Based on numerical results and a securitization
using a generalised trainload pattern, it is demonstrated that the primary frequency contents in the train-
load, and consequently in the dynamic response of the bridge, is largely governed by the bridge-to-car-
riage length ratio. Namely, for short bridges (with a length ratio below the order of 1.5), well-distributed
frequency peaks occur at a number of dominant frequencies, whereas for longer bridges the main fre-
quency peak tends to concentrate towards the lowest dominant frequency. Such a characteristic affects
directly the resonance condition and resonance speeds for bridges of different length categories, and this
observation echoes well the predictions of the resonance severity using a so-called Z -factor. For the spe-
cial case of bridge response under a single carriage/vehicle, theinfluenceof the carriage mass is examinedin association with the concept of critical speed, and the abnormal acceleration spikes that could occur
when the vehicle moves at the critical speed is highlighted.
2012 Elsevier Ltd. All rights reserved.
1. Introduction
The dynamic response of railway bridges is complicated due to
the involvement of moving loads and moving masses. Comparing
to road traffic, the trainload excitation is characterised by a unique
pattern of frequency spectrum, which directly affects the dynamic
response of the bridge. Moreover, the dynamic properties of rail-
way bridges, especially the natural frequencies of small- to med-
ium-size bridges, can be altered significantly due to moving
carriage masses.
Numerous publications exist in the literature regarding bridge
dynamic response and the train–bridge interactions. It is well
recognised that the dynamic response of a railway bridge is influ-
enced by a combination of factors, chiefly the bridge natural fre-
quency, train speed, and bridge and carriage lengths. However,
the intrinsic relationships among these parameters have generally
been implicitly expressed through dynamic formulations, whereas
specific guides for their application in practice are lacked. For
example, it is not straightforward to implement a general recom-
mendation that resonance could take place under certain norma-
lised speeds, without specific information with regard to the
resonance severity and an understanding of the trend of variations.
A seemingly effective way of approaching this subject is to re-
sort to the frequency analysis of the trainload in conjunction with
the frequency characteristics of the responding system. However,
studies stemming from a frequency perspective are still limited.
Those that fall into this category may be loosely divided into two
groups, one concerns the variation of the natural frequencies of
the responding bridge during the passage of a laden train/vehicle
(e.g. [1–5]), and the other deals with the frequency contents in
the trainload excitation and their general effect in the bridge re-
sponse (e.g., [5–8]). In particular, it has been demonstrated that,
in addition to the resonant frequencies, the primary frequencies
in the bridge response may be attributable to (a) the so-called
‘‘driving frequencies’’ associated with the duration of a vehicle
crossing the bridge [8], and (b) the so-called ‘‘dominant frequen-
cies’’ arising from the repeated loads (hence are related to the time
0141-0296/$ - see front matter 2012 Elsevier Ltd. All rights reserved.http://dx.doi.org/10.1016/j.engstruct.2012.04.007
⇑ Corresponding author at: Institute for Infrastructure and Environment, School
of Engineering, The University of Edinburgh, The Kings Buildings, Edinburgh EH9
3JL, UK. Tel.: +44 131 6519052; fax: +44 131 6506781.
E-mail address: [email protected] (Y. Lu).
Engineering Structures 42 (2012) 9–22
Contents lists available at SciVerse ScienceDirect
Engineering Structures
j o u r n a l h o m e p a g e : w w w . e l s e v i e r . c o m / l o c a t e / e n g s t r u c t

7/27/2019 Frequency characteristics of railway bridge
http://slidepdf.com/reader/full/frequency-characteristics-of-railway-bridge 2/14
interval between two consecutive carriage loads) (e.g., [7,9]). De-
spite the identification of these frequency factors, the understand-
ing of their influence on the bridge response remains to be rather
general.
The present paper aims to provide a comprehensive evaluation
of the frequency characteristics of a railway bridge response under
trainload, paying special attention to examining the significance
and the variation trend of key frequency components in the re-
sponse arising from the trainload, namely the driving frequencies
and dominant frequencies mentioned above. To incorporate the
influence of the moving mass, the analysis is carried out using a fi-
nite element model, in which a moving vehicle is simulated with a
moving mass block which is coupled with the bridge via surface
contact. For simplicity while withholding the primary frequency
characteristics, the vehicle dynamics and track irregularities are
not considered.
It is particularly worth noting that the relative length of the
bridge with respect to the length of the carriage is found to be a
governing factor determining the characteristic patterns and hence
the frequency contents in the trainload excitation, and therefore
this length ratio is employed in the classification of the frequency
response characteristics. Following the establishment of the fre-
quency characteristics, the bridge resonance effect is evaluated
through a series of parametric calculations. The observations on
the resonance phenomenon are then correlated with a newly pro-
posed resonance severity factor, called the Z -factor [10], to provide
a complete framework for the understanding as well as quantifica-
tion of the bridge resonance under moving trains.
2. Background theories
2.1. Natural frequency of bridge–moving train system
When a train moves on a bridge, the frequencies of the bridge
will be affected due to the effects of train mass coupled with the
bridge through the suspension systems. When the train mass is
large with respect to the mass of the bridge, such effect can be-
come significant.
The natural frequencies of the bridge during the passage of a
train (or a single vehicle as a specialised case) may be established
on the basis of the dynamic equation for the bridge coupled with
the moving object, as follows:
mb@ 2wb
@ t 2 þ EI
@ 4wb@ x4
þ c b@ wb@ t
¼ P ð x; t Þ ð1Þ
where EI , mb, c b are the flexural stiffness, mass per unit length and
damping coefficient of the bridge, wb is the bridge vertical displace-
ment, and P ( x, t ) is the interacting force between the vehicle and the
bridge.
The interacting force with the ith wheel–axle set may be ex-
pressed as [2]:
P ið x; t Þ ¼ d½ x ðVt aiÞ P 0;i mc @ 2wb
@ t 2 þ c c _wi þ kc wi
! ð2Þ
where d is the Dirac delta function, P 0,i is the static weight borne by
the ith wheel–axle set, a i is the distance between the first and ith
wheel–axle sets, wi is the displacement within the suspension
spring, mc denotes the effective mass that may be attributed to a
wheel–axle set, c c , kc are spring damping and stiffness of the vehi-
cle’s suspension system, respectively.
The solution of the motion equation can be obtained by modal
superposition. Denoting the nth mode shape as /n( x) and the gen-eralised modal coordinate as qbn(t ),
wbð x; t Þ ¼Xn
/nð xÞqbnðt Þ ð3Þ
For a simply supported bridge (beam), the mode shapes may be
expressed in a sinusoidal form, thus:
wbð x; t Þ ¼Xn
sinnp xLbqbnðt Þ ð4Þ
where Lb is the bridge length.Substituting Eqs. (2) and (4) into Eqs. (1), multiplying both sides
with sin (np x/Lb), and then integrating with respect to Lb yields:
€qbnðt Þ þ 2nbnxbn _qbnðt Þ þ x2
bnqbnðt Þ ¼ 2
mbLbP bnðt Þ ð5Þ
where xbn is the nth natural frequency, nbn is the corresponding
damping ratio, P bn(t ) is the generalised modal force and may be
expressed [1] as:
P bnðt Þ ¼XM i¼K
sinnpðv t aiÞ
LbP 0;ims
X1
k¼1
sinkpðv t aiÞ
Lb€qbkðt Þ þc c _wiþkc wi
" #
ð6Þ
A numerical integration method, such as the Wilson-h method,can be employed to obtain the bridge natural frequencies at each
time step. The results will allow the variation of the bridge fre-
quency to be plotted against time or the position of the moving
train.
2.2. Driving frequencies
The so-called ‘‘driving frequency’’ [8] is associated with the in-
verse of the time duration a vehicle crosses the bridge. Specialising
Eq. (2) into a single moving load,
P ð x; t Þ ¼ f c ðt Þdð x Vt Þ ð7Þ
where f c (t ) is the sum of the vehicle weight and the dynamic force
of the suspension system,
f c ðt Þ ¼ mc g þ kc ðwc wbÞ ð8Þ
where kc is the stiffness between moving mass and the bridge, wc
and wb are the dynamic deflections of the moving mass and the
bridge, respectively.
Substituting Eq. (7) into Eq. (5), and ignoring the damping term
yields:
€qbn þ x2
bnqbn ¼ f c ðt Þ
R L0 dð x Vt Þ/nð xÞd x
mbR L
0 /
2
nð xÞd xð9Þ
Combining with the motion equation of the moving mass, and
substituting Eq. (8), Eq. (9) may be re-written as [8]:
€qbn þ x2
bnqbn þ2x2c mc mbLb
sinnpVt Lb
X j
sin jpVt Lbqbj
2x2c mc mbLb
sinnpVt Lbqc ¼
2mc g
mbLbsinnpVt Lb
ð10Þ
If the mass of the passing vehicle is much less than that of the
bridge and hence may be ignored, the above equation reduces to:
€qbn þ x2
bnqbn ¼2mc g
mbLbsinnpVt Lb
ð11Þ
Assuming a zero initial condition, the solution to the above equa-
tion may be obtained as:
qbnðt Þ ¼
D
1 S 2n sin
npVt Lb S n sinðxbnt Þ
ð12Þ
10 Y. Lu et al. / Engineering Structures 42 (2012) 9–22

7/27/2019 Frequency characteristics of railway bridge
http://slidepdf.com/reader/full/frequency-characteristics-of-railway-bridge 3/14
where D ¼2mc gL3
b
n4p4EI is the static deflection due to the passing vehicle
with respect to the nth mode, and S n ¼ npV Lbxbn
is a relative speed
parameter.
Finally, the displacement response of the bridge can be ex-
pressed [8] as:
wbð x; t Þ ¼ XnD
1 S 2
n
sinnp xLb
sinnpV Lbt S n sinxbnt ð13Þ
The above results indicate that frequencies at
f dr ¼ npV Lb
1
2p
¼ n V
2Lb
ð14Þ
will be present in the bridge dynamic responses, in addition to the
natural frequencies of the bridge structure. These frequencies are
the ‘‘driving frequencies’’.
It is also noteworthy that with the introduction of f dr , the rela-
tive speed parameter S n becomes: S n = 2p f dr /xbn = xdr /xbn. It is
therefore clear that when xdr approaches xbn (or f dr approaches
f bn), S n approaches 1, and this effectively constitutes the criterion
for the critical speed. From this point of view, the definition of
the ‘‘driving frequencies’’ is meaningful as it relates the critical
speed condition to a conventional resonance criterion.
2.3. Dominant frequencies
The repeated wheel–axle loads from a moving train at a specific
point of observation may be represented in the following simpli-
fied form, assuming one generic load per carriage (e.g., [11]):
P ðt Þ ¼XN c j
f c ðt Þdðt jt c Þ ð15Þ
where N c is the number of carriages, f c (t ) denotes the generic
wheel–axle load, t c represents the time interval between the re-
peated loads, t c = Lc /V , with Lc being the length of a carriage.
Apparently the load described by Eq. (15) is a series of N c peri-odic load pulses with a time interval of t c . Such loading will man-
ifest on the frequency spectrum as having peak frequencies at
n (1/t c ) = nV /Lc . For an actual train with multiple wheel-sets in
each carriage, studies (e.g. [9]) have shown that the frequencies
arisen from the overall trainload is still dominated by nV /Lc . There-
fore, it makes sense to define these frequencies as the apparent
‘‘dominant frequencies’’ in the trainload [9], which can be ex-
pressed as:
f do;n ¼ nV =Lc ð16Þ
It should be noted that the velocity ratios underlying the ‘‘driving
frequencies’’ and ‘‘dominant frequencies’’, i.e., V /2Lb and V /Lc , have
been examined in previous researches in connection with the study
of the bridge resonance under moving trainloads (e.g. [1,11–14]). Itis recognised that when these ratios or their multiples come closer
to the bridge natural frequencies, resonant response to a certain de-
gree will occur [7,11]. In spite of the general notion, however, few
researches have been carried out to investigate the relative signifi-
cance of these frequencies (including their different orders) under
different train–bridge parameter combinations and the subsequent
effect on the resonance amplitude.
3. Numerical model and verification
In this section, a finite element model is set up to represent a
generic bridge–moving train system. The model is subsequently
employed to investigate the effects of the trainload excitation fre-
quencies on the bridge response under different combinations of the influencing parameters.
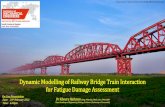
Fig. 1 schematically illustrates a generic finite element configu-
ration for the bridge (represented by a beam) and moving load/
mass system. The bridge is modelled by solid elements to facilitate
the attachment of the moving objects through a contact algorithm,
which is available in common general-purpose FE codes, such as
ANSYS11 used in the present study. It is possible to model the de-
tailed wheel–axle sets and the associated suspension system in
each carriage by discrete mass-spring sets, and attach the springs
at the bottom ends to the bridge surface via contact, as depicted
in Fig. 1a.
For the main purpose of evaluating the primary frequency char-
acteristics, a simplified scheme with each carriage being repre-
sented by a single mass and a point load is deemed to suffice, as
shown in Fig. 1b. Such a moving mass model will enable a more
convenient observation of the key frequency characteristics associ-
ated with the movement of the carriage load and the carriage mass
in the bridge response. Similar simplification has been considered
in previous studies, e.g. [15]. It should be anticipated, however,
that the detailed response time histories and some secondary
frequency contents could be affected, as will be examined in the
verification analysis that follows.
A simply-supported railway bridge of 8-m length, which was
actually measured in a field study, is considered as a prototype
for the basic model set-up and validation. The mass per unit length
of the bridge is estimated to be 2 103 kg/m, and the flexural
rigidity (EI) is assumed such that the resulting fundamental natural
frequency of the bridge model matches that of the measured
bridge, which is approximately 14 Hz. A 1% damping ratio is con-
sidered in the model.
To avoid unnecessary complication, each mass block is
modelled essentially as a point mass with a nominal size of
0.1 0.1 m in the FE model. A particular amount of mass can be
obtained by specifying an appropriate density for the mass block.
The force exerted on the bridge by a carriage is achieved by impos-
ing a vertical load on the moving mass. The vertical load is assigned
independently, such that the effects of the moving load and mov-
ing mass may be investigated separately when needed. For exam-ple, in order to examine the adequacy of ignoring the moving mass
while considering the moving load, a zero mass may be assigned
while keeping the moving vehicle load.
Fig. 1b shows schematically the generic train–bridge model. It is
noted that modelling of multiple carriages (moving masses) is rea-
lised by starting the mass units one after another at pre-calculated
time intervals. The static deflection caused by the bridge self-
weight is not considered in the analysis.
(a)
V
Lc
Moving mass coupled with bridge viacontact, possibly involving springs
(b) Lc
mct=Lc /V
Pc
V
Fig. 1. Schematic of FE model for bridge dynamic response under moving train: (a)
Considering wheel-set configuration; (b) simplified with equally-spaced movingmass/load.
Y. Lu et al. / Engineering Structures 42 (2012) 9–22 11

7/27/2019 Frequency characteristics of railway bridge
http://slidepdf.com/reader/full/frequency-characteristics-of-railway-bridge 4/14
As verification of the above simplified modelling scheme, the
model is firstly employed to analyse the response of the 8-m bridge
subjected to moving train as recorded from the field measurement
exercise, Fig. 2a, and the modelling results are compared with the
recorded responses. The measured responses included the dis-
placement and acceleration time histories at the mid-span of the
bridge. A typical recorded scenario involved 8 carriages, with the
distance between adjacent carriages being approximately 20 m,
and the speed of the train was approximately 45 m/s. The mass
of the carriages is approximated such that the predicted response
amplitudes match the measured peak responses. Fig. 2b compares
the simulated and measured mid-span displacement time histories
and their corresponding frequency spectra.
The characteristics of the numerical results resemble well the
measured bridge response. As can be expected from simplifying
each carriage into one single mass in the FE model, the numerical
time histories show only one peak during the passage of each car-
riage, while the measured response exhibits double peaks. On the
frequency spectra, the first few dominant frequencies in the
numerical results correlate well with their experimental counter-
parts; however the numerical results exhibit a few more frequency
peaks into the higher order range. This may be attributable to some
significant free vibration following each segment of forced re-
sponse from numerical results, whereas the measured displace-
ment dies out quickly after each excitation, due probably to the
low sensitivity of the displacement transducers to the high fre-
quency components in the response.
For further verification of the simplification of each carriage
into a single mass/load in representing the primary frequency
characteristics in the bridge response, another analysis is per-
formed in which each carriage is simulated via two wheel sets
(two mass blocks in the model). The resulting response time histo-
ries and the frequency spectra are compared with those using the
generalised single mass per carriage scheme in Fig. 3. As can be
seen, although the refined model simulates the bridge response
more realistically in the time domain, the frequency components
are very similar to those from the generalised model. It can there-fore be concluded that the generalised model is suitable for an
investigation into the frequency characteristics concerning the pri-
mary train–bridge parameter combinations.
4. Frequency characteristics of bridge response under a single
moving vehicle
As discussed in Section 2.2, the bridge dynamic response to a
single moving vehicle will contain the ‘‘driving frequencies’’ dueto the excitation of a single load pulse. Such ‘‘driving frequencies’’
become obvious if the moving load pulse is looked upon qualita-
tively as a half cycle of a sine function of duration t b, leading to
equally spaced apparent frequencies at an interval of 1/2t b = V /
2Lb, as expressed in Eq. (14). Moreover, the primary frequency as
in a half cycle sinusoidal excitation is obviously concentrated at
the first order, i.e. f dr 1 = V /2Lb. It can be envisaged that as this fre-
quency approaches the bridge fundamental frequency, the dy-
namic response of the bridge will increase. This leads to the
concept of the critical speed.
Critical speed is a term used to describe the condition under
which the bridge approaches the maximum (global) response
when subjected to a single moving load. Without considering the
moving mass, it can be shown that (e.g. [16,17]):
V cr ¼ 2 f b1Lb ð17Þ
where V cr is the critical speed, f b1 is the bridge fundamental fre-
quency, Lb is the bridge length.
With the identification of the driving frequencies associated
with a single carriage, especially the basic driving frequency
f dr 1 = V /2Lb, the above critical speed may be looked upon as a reso-
nance condition such that the primary excitation frequency
matches the natural frequency of the bridge, f dr 1 = f b1, and hence
Eq. (17).
A particular usefulness of viewing the critical speed from the
perspective of resonance is that, when the moving mass of the car-
riage is taken into account, the critical speed will automatically de-
crease as the natural frequency of the bridge decreases with the
increase of the moving mass. On this basis, the modified critical
speed may be estimated by introducing a modified ‘‘effective’’
(a)
(b)
0 1 2 3 4 5-1
0
1
2
3
4
Time (s)
D e f l e c t i o n ( m m )
Experimental
Numerical
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
Frequency (Hz)
F F T a m p l i t u d e
Experimental
Numerical
Disp transducer Accelerometer
Fig. 2. Comparison between numerical and experimental results: (a) Measured 8-m railway bridge; (b) time histories and frequency spectra.
12 Y. Lu et al. / Engineering Structures 42 (2012) 9–22

7/27/2019 Frequency characteristics of railway bridge
http://slidepdf.com/reader/full/frequency-characteristics-of-railway-bridge 5/14
natural frequencywhenthe moving carriage mass is involved. As an
approximation, the modified natural frequency when the moving
mass reaches the mid-span of bridge, f b1m, may be employed, thus:
V cr ;m ¼ 2 f b1mLb ð18Þ
More detailed discussion on the determination of the critical speedwhen a significant moving mass is involved is presented elsewhere
[10], and it has been demonstrated that using f b1m to represent the
effective mass-loaded frequency can yield a reasonable estimation
of the mass-loaded critical speed to an accuracy within about
10%, even when a very large moving mass is involved.
To give an example, Fig. 4 illustrates the amplitude deflection
(mid-span) versus speed relationship as computed using the 8-m
bridge model described in Section 3, for (1) case-1: without consid-
ering the vehicle mass, and (2) case-2: considering a vehicle mass
of 250% of the bridge mass, respectively. To allow for a direct com-
parison, the moving load is kept the same in both cases, being
400 kN. The critical speed according to Eq. (17) is calculated as
224 m/s for case-1 using the bare bridge frequency f b1 = 14 Hz,
and this agrees well with the numerical results without consider-ing the moving mass. However, it deviates considerably from the
actual critical speed for case-2 when a heavy vehicle mass is in-
volved. On the other hand, when the mass-loaded frequency
f b1m 6 Hz is considered, the critical speed according to Eq. (18)
is found to be about 100 m/s, which matches well the correspond-
ing numerical result as indicated in Fig. 4.
Although from Fig. 4 the amplitude deflection of the bridge does
not appear to increase significantly upon the ‘‘resonance’’ at the
critical speed, the bridge acceleration, and to a lesser extent the
velocity, tends to exhibit drastic increase under such a condition.
Figs. 5 and 6 show the bridge mid-span deflection, velocity and
acceleration time histories when the vehicle moves at about the
critical speed, considering a small and very large vehicle mass
(case-1 and case-2 mentioned previously), respectively. For a com-
parison, the responses when the vehicle moves at selected reduced
speeds are also included.
For case-1 (Fig. 5), it can be observed that when the vehicle
moves at the critical speed, the mid-span deflection reaches the
maximum at the time when the vehicle leaves the bridge (0.035 s
in this case). At this point the bridge mid-span velocity approaches
zero; however, the acceleration (slope of the velocity) appearsto in-
crease drastically and reaches about 20 g around the end of the
forced response phase. When the vehicle moves at a reduced speed,
e.g. half of the critical speed herein as shown in Fig. 5b, no acceler-
ation spike at the end of the forced response occurs.
For case-2 (Fig. 6) where the influence of a large vehicle mass is
taken into account, the general trend is similar to the situation de-
scribed above for case-1. In fact, under the critical speed the slope
of velocity around the time when the vehicle leaves the bridge be-
comes even steeper than in case-1, prompting a maximum acceler-
ation to reach as high as 50 g. Such acceleration spikes tend to
disappear when the speed is reduced, and when the speed is
reduced to 1/4th of the critical speed, the maximum acceleration
reduces to below the order of 1.0 g.
It should be noted that in practice the critical speed V cr = 2 f b1Lb
under a single moving vehicle is not normally attainable in road
traffic. However, it is possible to reach such speeds in the case of
railway bridges especially with high speed trains. As will be dem-
onstrated in the sections that follow, when multiple carriages are
involved the frequency characteristics and subsequently the reso-
nant phenomena will be controlled by the repeated carriage loads,
i.e. the ‘‘dominant frequency’’ instead of the ‘‘driving frequency’’
effect.
5. Frequency characteristics of bridge response under multiplecarriages
For the dynamic response of railway bridges, the most impor-
tant dynamic characteristic is anticipated to associate with the re-
peated load caused by the passage of multiple carriages. As
mentioned in Introduction, the repeated carriage loads give rise
to the so-called ‘‘dominant frequencies’’ in the trainload, and such
frequencies play an important role in determining the bridge dy-
namic response as discussed generally in some previous studies
(e.g., [1,9,10,13,18]).
In the present numerical investigation, ten moving blocks are
considered to simulate a trainload. Each block is assigned a stan-
dard carriage mass of 40 tons, while a 400 kN load is applied on
each moving block. The distance between two adjacent blocks is20 m, representing the length of a typical carriage.
0 1 2 3 4 5-1
0
1
2
3
4
Time (s)
D
e f l e c t i o n ( m m )
One wheelaxle model
Two wheelaxles model
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
Frequency (Hz)
F
F T a m p l i t u d e
One wheelaxle model
Two wheelaxles model
Fig. 3. Comparison of results using two different FE model settings.
0 100 200 3000
10
20
30
40
50
Speed (m/s)
M a x d e f l e c t i o n ( m m )
← I ← II
Negligible mass
250% bridge mass
Fig. 4. Variation of amplitude deflection of the bridge with the vehicle speed.Vertical line I: predicted by V cr = 2 f b1mLb; line II: predicted by V cr = 2 f b1Lb.
Y. Lu et al. / Engineering Structures 42 (2012) 9–22 13

7/27/2019 Frequency characteristics of railway bridge
http://slidepdf.com/reader/full/frequency-characteristics-of-railway-bridge 6/14
The 8-m prototype bridge is firstly used to investigate the
bridge responses and the corresponding frequencies in a short-
span bridge scenario. Other bridge cases with a medium-span
length and a long-span length will be modelled subsequently, so
as to observe the effect of different bridge-to-carriage length ratios.
5.1. Frequency characteristics of a short bridge scenario (8-m length)
In such a short bridge scenario where the bridge length is smal-
ler than the carriage length, only one moving block will act on the
bridge during each forced response period.
(a)
0 0.05 0.1-0.04
-0.02
0
0.02
0.04
Time (s)
D e f l e c t i o n ( m )
0 0.05 0.1-4
-2
0
2
4
Time (s)
V e l o c i t y ( m / s )
0 0.05 0.1-300
-150
0
150
300
Time (s)
A c c e l e r a t i o n ( m / s 2 )
(b)
0 0.06 0.12-0.04
-0.02
0
0.02
0.04
Time (s)
D e f l e c t i o n ( m )
0 0.06 0.12-4
-2
0
2
4
Time (s)
V e l o c i t y ( m / s )
0 0.06 0.12-300
-150
0
150
300
Time (s)
A c c e l e r a t i o n ( m / s 2 )
Fig. 5. Bridge mid-span responses at representative speeds, ignoring moving mass; dashed line marks end of forced response: (a) At critical speed (224 m/s); (b) at half
critical speed (112 m/s).
(a)
0 0.08 0.16-0.04
-0.02
0
0.02
0.04
Time (s)
D e f l e c t i o n ( m )
0 0.08 0.16-4
-2
0
2
4
Time (s)
V e l o c i t y ( m / s )
0 0.08 0.16-600
-300
0
300
600
Time (s)
A c c e l e r a t i o n ( m / s 2 )
(b)
0 0.1 0.2-0.04
-0.02
0
0.02
0.04
Time (s)
D e f l e c t i o n ( m )
0 0.1 0.2-4
-2
0
2
4
Time (s)
V e l o c i t y ( m / s )
0 0.1 0.2-300
-150
0
150
300
Time (s)
(c)
0 0.25 0.5-0.04
-0.02
0
0.02
0.04
Time (s)
D e f l e c t
i o n ( m )
0 0.25 0.5-0.3
-0.15
0
0.15
0.3
Time (s)
V e l o c i t y ( m / s )
0 0.25 0.5-10
-5
0
5
10
Time (s)
A c c e l e r a t i o n ( m / s 2 )
A c c e l e r a t i o n ( m / s 2 )
Fig. 6. Bridge mid-span responses at representative speeds, considering a heavy (250%) moving mass; dashed line marks end of forced response: (a) At near critical speed
(100 m/s); (b) at half critical speed (50 m/s); (c) at quarter critical speed (25 m/s).
14 Y. Lu et al. / Engineering Structures 42 (2012) 9–22

7/27/2019 Frequency characteristics of railway bridge
http://slidepdf.com/reader/full/frequency-characteristics-of-railway-bridge 7/14
Three different train speeds are examined, namely 20 m/s,
50 m/s and 100 m/s. Given a carriage length of 20 m, these speeds
will correspond to dominant frequencies of around 1n, 2.5n and 5n
Hz (n = 1,2,. . .), respectively. Note that the fundamental natural
frequency of the bare bridge is 14 Hz, and the critical speed based
on a single moving carriage would be about 100 m/s taking into ac-
count the mass-loaded natural frequency of about 6 Hz. Figs. 7 and
8 show the bridge displacement and acceleration responses, along
with the corresponding FFT spectrum curves.
As can be seen, both the displacement and acceleration fre-
quency spectra exhibit clear spectral peaks at the anticipated dom-
inant frequencies. From the mid-span deflection response it can be
observed that pronounced resonance effect occurs under the speed
of 50 m/s, apparently due to the repeated carriage loads or the
‘‘dominant frequencies’’. On the other hand, at the speed of
100 m/s which marks the critical speed under a single moving load
as discussed earlier in Section 4, no successive increase of the re-
sponse occurs between carriage loads, and the maximum response
is essentially governed by that induced from a single carriage. This
comparison clearly demonstrates a very different resonance phe-
nomenon in close association with the ‘‘dominant frequencies’’,
and the significance of the ‘‘driving frequency’’ tends to diminish.
Further discussion of the resonance under repeated loads will be
given later in connection with the examination of the composition
of the dominant frequencies for different bridge–carriage length
ratios.
It should be noted that, although the significance of the crit-
ical speed is rendered less significant in the overall dynamic re-
sponse, when such a speed is reached the abnormal acceleration
spikes still occur in this short-bridge scenario, see Fig. 8c. This is
consistent with the observation from the single vehicle load
case.
5.2. Frequency characteristics of a medium bridge scenario (40-m
bridge)
A 40-m bridge is considered to represent a ‘‘medium length’’
bridge in the sense that more than one carriage may act on the
bridge at one time. To be consistent with the increase in the bridge
length as compared to the 8-m bridge, the mass per unit length is
increased by 1.6 times, yielding a carriage–bridge mass ratio of
30%, while the stiffness is adjusted such that the resulting bridge
fundamental frequency is approximately 10 Hz. The damping
ratios are kept as 1%. Figs. 9 and 10 present the bridge dynamic
responses and their FFT curves for the same trainload at three dif-
ferent speeds.
The increase of the bridge length does not affect the trainload
dominant frequencies as these frequencies are associated only
with the speed and the carriage length. Recall that these frequen-
cies are 1n, 2.5n and 5n Hz, respectively. The basic driving fre-
quency, which is presumably to be of lesser effect, would be
0.25, 0.625, and 1.25 Hz, for the three speeds respectively, while
the critical speed associated with a single carriage would be a
rather theoretical value of 800 m/s for this bridge and hence is
not examined.
Similar to the 8-m bridge case, a number of dominant frequency
peaks can be observed in the responses. The bridge deflection does
not exhibit much dynamic response when the speed is low (20 m/s
in this case) and the deflection history closely resembles the pat-
tern of the motion of the trainload. With the increase of speed to
100 m/s, the deflection apparently increases. From the FFT curves
it can be observed that the peaks around the natural frequency
of the bridge (about 10 Hz) tend to be more significantly amplified,
and this may be attributable to the fact that the natural frequency
of the bridge falls within the more powerful first few dominant
(a)
0 2 4 6 8 10-0.06
-0.03
0
0.03
0.06
Time (s)
D e f l e c t i o n ( m )
0 5 10 15 200
0.01
0.02
Frequency (Hz)
F F T a m p l i t u d e
(b)
0 1 2 3 4-0.06
-0.03
0
0.03
0.06
Time (s)
D e
f l e c t i o n ( m )
0 10 20 30 400
0.01
0.02
Frequency (Hz)
F F T a m p l i t u d e
(c)
0 0.5 1 1.5 2-0.06
-0.03
0
0.03
0.06
Time (s)
D e f l e c t i o n ( m )
0 10 20 30 400
0.01
0.02
Frequency (Hz)
F F T a m p l i t u d e
Fig. 7. Displacement time histories (left) and FFT spectra (right) for the 8-m bridge under different train speeds: (a) Speed = 20 m/s (expected f do,n at 1 Hz interval); (b)speed = 50 m/s (expected f do,n at 2.5 Hz interval); (c) speed 100 m/s (expected f do,n at 5 Hz interval).
Y. Lu et al. / Engineering Structures 42 (2012) 9–22 15

7/27/2019 Frequency characteristics of railway bridge
http://slidepdf.com/reader/full/frequency-characteristics-of-railway-bridge 8/14
(a)
0 2 4 6 8 10-10
-5
0
5
10
Time (s)
A
c c e l e r a t i o n ( m / s 2 )
0 5 10 15 200
0.5
1
Frequency (Hz)
F F T a m p l i t u d e
(b)
0 1 2 3 4-200
-100
0
100
200
Time (s)
0 10 20 30 400
20
40
60
80
Frequency (Hz)
F F T a m p l i t u d e
(c)
0 0.5 1 1.5 2-500
-250
0
250
500
Time (s)
0 10 20 30 400
50
100
150
Frequency (Hz)
F F T a m p l i t u d
e
A c c e l e r a t i o n ( m / s 2 )
A c c e l e r a t i o n ( m
/ s 2 )
Fig. 8. Acceleration time histories (left) and FFT spectra (right) for the 8-m bridge under different train speeds: (a) Speed 20 m/s (expected f do,n at 1 Hz interval); (b) speed
50 m/s (expected f do,n at 2.5 Hz interval); (c) speed 100 m/s (expected f do,n at 5 Hz interval).
(a)
0 2 4 6 8 10 11-0.04
-0.02
0
0.02
0.04
Time (s)
D e f l e c t i o n ( m )
0 5 10 15 200
5x 10
-3
Frequency (Hz)
F F T a m p l i t u d e
(b)
0 1 2 3 4 4.4-0.04
-0.02
0
0.02
0.04
Time (s)
D e
f l e c t i o n ( m )
0 5 10 15 200
5x 10
-3
Frequency (Hz)
F F T
a m p l i t u d e
(c)
0 0.5 1 1.5 2 2.2-0.04
-0.02
0
0.02
0.04
Time (s)
D e f l e c t i o n ( m )
0 5 10 15 200
5x 10
-3
Frequency (Hz)
F F T a m p l i t u d e
Fig. 9. Displacement time histories (left) and FFT spectra (right) for the 40-m bridge under different train speeds: (a) speed = 20 m/s (expected f do,n at 1 Hz interval); (b)speed = 50 m/s (expected f do,n at 2.5 Hz interval); (c) speed = 100 m/s (expected f do,n at 5 Hz interval).
16 Y. Lu et al. / Engineering Structures 42 (2012) 9–22

7/27/2019 Frequency characteristics of railway bridge
http://slidepdf.com/reader/full/frequency-characteristics-of-railway-bridge 9/14
frequencies. As a result, increased degree of resonance occurs. This
observation is supported by the significantly increased accelera-
tion amplitudes as the speed increases. It should be noted thatthe speed of 100 m/s is still far below the critical speed (800 m/s)
for this 40-m bridge, hence no acceleration spikes occur.
5.3. Frequency characteristics of a long bridge scenario (80-m bridge)
An 80-m bridge is employed to represent a ‘‘longer’’ bridge such
that multiple carriages can act on the bridge simultaneously. The
mass and stiffness of the bridge are increased from the previous
40-m bridge, resulting in a fundamental frequency of about 5 Hz,
and a carriage-to-bridge mass ratio of 8%. The damping ratio is kept
at 1%. Figs. 11 and 12 depict the bridge dynamic responses and cor-
responding FFT curves.
Comparing to the 40-m bridge, it can be observed that the res-
onance effect, herein at around 5 Hz, is more significantly excited.This is deemed to be attributable to the fact that, with increase of
the bridge-to-carriage length ratio, the excitation frequencies tend
to further concentrate to the lowest dominant frequencies. As the
natural frequency of the bridge also reduces, resonance becomes
inevitably more significant.
Summarising the frequency characteristics from the above anal-
yses under multi-carriage trainload excitation, it may be concluded
that (a) the dynamic responses are governed by the multiple-car-
riage dominant frequencies, while the driving frequencies which
arise from an individual moving load do not appear to have a sig-
nificant effect; and (b) with the increase of the bridge length, the
frequency peaks as can be observed from the FFT of the response
tends to be increasingly concentrated to the lowest dominant fre-
quencies, and as the natural frequency of the bridge also reduces,the frequency peak at the natural frequency tends to be more
significantly amplified. To better explain these observations, it is
necessary to look into the variation of the frequency spectrum in
the excitation as the bridge-to-carriage length increases, whichwould also provide insight into the trend of the resonance effect.
6. Effect of bridge-to-carriage length ratio on frequency
characteristics of trainload
For a typical trainload involving multiple carriages, it has been
demonstrated that the dominant frequencies are a primary charac-
ter both in the excitation (with repeated carriage loads) as well as
in the bridge response. It has also been shown that, as the bridge
length increases, the primary frequency contents in the response
tend to become increasingly concentrated in the lower few domi-
nant frequencies. In this section, we shall attempt to gain insight
into this trend by analysing the variation of the frequency contents
in different trainload scenarios.Considering the fundamental bending mode response of the
bridge, the load exerted by each carriage as it moves from one
end of the bridge to another may be generalised as a half sine
pulse, with a duration of T b as depicted in Fig. 13. When multiple
carriages are involved, the load will consist of a series of such
pulses with an interval between consecutive pulses being T c . For
a train speed V , T b = Lb/V , T c = Lc /V , where Lb, Lc are the bridge length
and the carriage length, respectively. The overall pattern of the
trainload, and hence the frequency distribution, depends only on
the relative values of T b and T c , which in turn depends on the length
ratio aL = Lb/Lc . It is noted that a similar approach in characterising
various trainload scenarios was used in [10] for a different purpose.
In what follows, we shall examine the variation of the frequency
spectrum for different characteristic aL values. For convenience of presentation, we assume a fixed velocity of 50 m/s and a carriage
(a)
0 5 10-10
0
10
Time (s)
A
c c e l e r a t i o n ( m / s 2 )
0 5 10 15 200
1
2
3
Frequency (Hz)
F F T a m p l i t u d e
(b)
0 1 2 3 4-10
0
10
Time (s)
0 5 10 15 200
2
4
6
Frequency (Hz)
F F T a m p l i t u d e
(c)
0 0.5 1 1.5 2-50
0
50
Time (s)
0 5 10 15 200
10
20
Frequency (Hz)
F F T a m p l i t u d e
A c c e l e r a t i o n ( m / s 2 )
A c c e l e r a t i o n ( m / s
2 )
Fig. 10. Acceleration time histories (left) and FFT spectra (right) for the 40-m bridge under different train speeds: (a) Speed = 20 m/s (expected f do,n at 1 Hz interval); (b)
speed = 50 m/s (expected f do,n at 2.5 Hz interval); (c) speed = 100m/s (expected f do,n at 5 Hz interval).
Y. Lu et al. / Engineering Structures 42 (2012) 9–22 17

7/27/2019 Frequency characteristics of railway bridge
http://slidepdf.com/reader/full/frequency-characteristics-of-railway-bridge 10/14
(a)
0 3 6 9 12
-0.1
-0.05
0
0.05
0.1
Time (s)
D e f l e c t i o n ( m )
0 5 10 15 20
0
0.005
0.01
Frequency (Hz)
F F T a m p l i t u d e
(b)
0 1 2 3 4 5-0.1
-0.05
0
0.05
0.1
Time (s)
D e f l e c t i o n ( m )
0 5 10 15 200
0.005
0.01
Frequency (Hz)
F F T a m p l i t u d e
(c)
0 0.5 1 1.5 2 2.5-0.1
-0.05
0
0.05
0.1
Time (s)
D e f l e c t i o n ( m )
0 5 10 15 200
0.005
0.01
Frequency (Hz)
F F T a m p l i t u
d e
Fig. 11. Displacement time histories (left) and FFT spectra (right) for the 80-m bridge under different train speeds: (a) speed = 20 m/s (expected f do,n at 1 Hz interval); (b)
speed = 50 m/s (expected f do,n at 2.5 Hz interval); (c) speed = 100 m/s (expected f do,n at 5 Hz interval).
(a)
0 5 10-20
-10
0
10
20
Time (s)
A c c e l e r a t i o n ( m / s 2 )
0 5 10 15 200
1
2
Frequency (Hz)
F F T a m p l i t u d e
(b)
0 1 2 3 4 5-50
-25
0
25
50
Time (s)
0 5 10 15 200
2
4
Frequency (Hz)
F F T a m p l i t u d e
(c)
0 0.5 1 1.5 2 2.5-100
-50
0
50
100
Time (s)
0 5 10 15 200
5
10
Frequency (Hz)
F F T a m p l i t u d e
A c c e l e r a t i o n ( m / s 2 )
A c c e l e r a t i o n ( m / s 2 )
Fig. 12. Acceleration time histories (left) and FFT spectra (right) for the 80-m bridge under different train speeds: (a) speed = 20 m/s (expected f do,n at 1 Hz interval); (b)speed = 50 m/s (expected f do,n at 2.5 Hz interval); (c) speed = 100 m/s (expected f do,n at 5 Hz interval).
18 Y. Lu et al. / Engineering Structures 42 (2012) 9–22

7/27/2019 Frequency characteristics of railway bridge
http://slidepdf.com/reader/full/frequency-characteristics-of-railway-bridge 11/14
length of 20 m, with ten carriages. The theoretical ‘‘dominant fre-
quencies’’ are thus fixed at (V /Lc )n = (1/T c )n = 2.5nHz, where n is a
positive integer.
(i) aL = Lb/Lc ? 0: for example, let T b = 0.02 s, T c = 0.4 s
(Lb = ‘‘1 m’’, Lc = 20 m, V = 50 m/s)This scenario represents a
lower-bound aL situation with essentially a ‘‘point’’ bridge,
such that the load resembles a string of impulses, as shown
in Fig. 14i. The frequency spectrum is a typical repeated
impulse character with almost equal peaks for all orders of
the ‘‘dominant frequencies’’ at a constant interval of 1 /
T c = 2.5 Hz.
(ii) aL < 1.0: for example, let T b = 0.16s, T c = 0.4 s (Lb = 8 m,
Lc = 20 m, V = 50 m/s) This case is analogous to the analysed
8-m short bridge, with the load pattern as depicted in
Fig. 14ii. It can be clearly seen that, as the duration T b
increases with respect to the time interval T c , the spectralpeaks at higher order ‘‘dominant’’ frequencies reduce
sharply.
(iii) aL = 1.0: for example let T b = 0.4s, T c = 0 .4 s (Lb = 20 m,
Lc = 20 m, V = 50 m/s) This is a dividing scenario where the
bridge length is equal to the carriage length so that the con-
secutive load pulses arrive one immediately after the other.
The frequency spectrum still shows the character of equally
spaced peaks at an interval of 2.5 Hz, but it is increasingly
dominated by the first few frequencies.
(iv) aL > 1.0: for example let T b = 2 s, T c = 0.4 s (Lb = 100 m,
Lc = 20 m, V = 50 m/s) As depicted in Fig. 14iv, in this case
the generalised individual carriage load pulses overlap one
another; for this particular example there are 4 carriages
acting on the bridge simultaneously. The peak frequenciesat the expected intervals of 2.5 Hz are visible, with concen-
tration of spectral power at the lowest dominant frequency
of 2.5 Hz. Note that the spectrum in the near-zero frequency
range is the result of the overall trapezoidal load shape in
the positive domain, and it represents a strong presence of
the quasi static component.
In light of the above observations, much of the characteristics in
the bridge responses described in Section 5 becomes explicable
from the view point of frequency contents in the trainload excita-
tion. Namely,
(a) The 8-m bridge case falls into the loading scenario-(ii),
though the frequency axis can expand or contract as thespeed of the train varies. The frequency spectra of the
displacements for the 20 m/s and 50 m/s speeds show clear
consistency with the frequency spectra of the generalised
load patterns, with higher peaks appear at the lowest few
‘‘dominant frequencies’’. The frequency spectra of the accel-
eration responses also exhibit clear peaks at the dominant
frequencies, but over a wider frequency range, i.e., involves
higher order as well as lower order dominant frequencies.
(b) For longer-length bridges, as in the cases of 40 m and 80 m
bridge analysed in Section 5, the overlapping of individual
carriage load pulses results in the energy in the dynamic
excitation being concentrated towards the lowest dominant
frequency, causing the dynamic deflection to exhibit pri-
mary frequencies at the first 1–2 dominant frequencies.
7. Discussion on the bridge resonance and effects of moving
mass and bridge-to-carriage length ratio
The resonance phenomenon can be expected to associate clo-
sely with the ‘‘dominant frequencies’’. Existing studies tend to sug-
gest that when any of the ‘‘dominant frequencies’’ coincides with
the (fundamental) natural frequency of the bridge, resonance
would occur, thus,
f do;n ¼ nV =Lc ¼ f b1 ð19Þ
or
V re ¼1
n f b1Lc ð20Þ
Having identified the varying patterns of the frequency spec-
trum of the trainload as a function of the bridge-to-carriage length
ratio, as discussed in Section 6, it may be envisaged that shorter
bridges are more prone to resonance because it is possible for dif-
ferent orders of the dominant frequencies, and hence different
speeds, to excite resonance. On the other hand, for longer bridges
it would primarily be the first dominant frequency that may excite
significant resonance. This can be observed from Fig. 15, which
depicts the variation of the 8-m and 40-m bridge mid-span deflec-tions with moving speed. For a comparison, the curve for the 8-m
bridge under a single carriage is also included in Fig. 15a.
It can be observed that in the case of the 8-m bridge, two signif-
icant resonance peaks appear, and the ‘‘resonance’’ at the two dif-
ferent speeds is actually excited by the second and first order
dominant frequency, respectively. Namely, at the resonance speed
of 60 m/s, it is f dr 2 = 2 (V /Lc ) = 2 3 Hz f b1m (mass-loaded natu-
ral frequency equal to about 6 Hz), while at the speed of 120 m/s, it
is the f dr 1 = 1 (V /Lc ) = 1 6 Hz f b1m. On the other hand, only one
significant resonance, at around 190 m/s, is found in the 40-m
bridge scenario, and it is caused by the first dominant frequency
being coincident with the natural frequency of the mass-loaded
bridge. This confirms the previous argument that in the case of
longer bridges, the spectral energy from the excitation will be pri-marily concentrated towards the first dominant frequency to cause
significant resonance; whereas in shorter bridges, the energy is
distributed among a few dominant frequencies, and thus signifi-
cant resonance may be excited due to one of these dominant fre-
quencies, leading to multiple resonance speeds.
Fig. 16 depicts the bridge deflection time histories and their FFT
spectra corresponding to the resonance peaks in Fig. 15. The results
further illustrate that a series of dominant frequencies indeed exist
in the 8-m bridge response, while only the fundamental dominant
frequency is identifiable in the 40-m bridge response.
A more rigorous derivation of the resonance effect when a train-
load is moving at a potential resonance speed is presented in [10].
It demonstrates that under such a resonance condition, the sever-
ity of resonance as measured by the normalised increase of theconsecutive deflection amplitudes (squared), called the Z -factor,
(a) Lb << Lc
T bT c
T b = V / Lb; T c = V / Lc
Time
Load
Load
Time
(b) Lb > Lc
Fig. 13. Generalisation of the trainload patterns.
Y. Lu et al. / Engineering Structures 42 (2012) 9–22 19

7/27/2019 Frequency characteristics of railway bridge
http://slidepdf.com/reader/full/frequency-characteristics-of-railway-bridge 12/14
(i)
0 1 2 3 40
0.5
1
1.5
Time (s)
L o a d
0 10 20 300
0.02
0.04
0.06
Frequency (Hz)
F F T a m p l i t u d e
(ii)
0 1 2 3 40
0.5
1
1.5
Time (s)
L o a d
0 10 20 300
0.2
0.4
F F T a m p l i t u d e
(iii)
0 1 2 3 40
0.5
1
1.5
Time (s)
L o a d
0 10 20 300
0.2
0.4
Frequency (Hz)
F F T a m p l i t u d e
(iv)
0 2 4 6 80
2
4
Time (s)
L o a d
0 10 20 300
0.02
0.04
Frequency (Hz)
F F T a m
p l i t u d e
Frequency (Hz)
Fig. 14. Different patterns of generalised trainload (left) and corresponding frequency spectra (right): (i) T b = 0.02s, T c = 0.4s (aL = 0.05); (ii) T b = 0.16s, T c = 0.4s (aL = 0.4);
(iii) T b = 0.4s, T c = 0.4s (aL = 1.0); (iv) T b = 2.0 s, T c = 0.4s (aL = 2.5).
(a) (b)
50 100 150 200 250 3000
20
40
60
80
100
Speed (m/s)
M a x d e f l e c t i o n ( m m )
Single carriage
Multiple carriages
50 100 150 200
20
40
60
80
100
Speed (m/s)
M a x d e f l e c t i o n ( m m )
Multiple carriages
Fig. 15. Amplitude response (mid-span deflection) versus carriage moving speed: (a) 8-m bridge; (b) 40-m bridge.
20 Y. Lu et al. / Engineering Structures 42 (2012) 9–22

7/27/2019 Frequency characteristics of railway bridge
http://slidepdf.com/reader/full/frequency-characteristics-of-railway-bridge 13/14
is essentially controlled only by the bridge-to-carriage length ratio,
aL = Lb/Lc . Z can be expressed as:
Z ¼ 2nLb=Lc
ð2nLb=Lc Þ2 1
" #2
1 þ cos 2pnLbLc
ð21Þ
where n is the order of the dominant frequency. A plot of the Z -fac-
tor is given in Fig. 17. It can be clearly identified that for the 8-m
bridge discussed herein, where aL = 0.4, significant resonance could
happen upon two n-values, with n = 2 giving rise to the highest res-
onance and n = 1 the next, thus according to Eq. (20) leading to two
significant resonance speeds of around 60 and 120 m/s, respec-
tively; For the 40-m bridge, aL = 2, sensible resonance would only
occur with the first order dominant frequency, with a speed equal
to 200 m/s (a more accurate value would be 190 m/s considering
an effective mass-loaded bridge frequency of 9.5 Hz as shown in
[10]). These results are very consistent with the observations made
earlier based on the numerical simulation results. In general, short-
er bridges with a bridge–carriage length ratio up to 1.5 appear to be
more susceptible to the resonance effect.
8. Conclusions
The dynamic response of a railway bridge to trainload excita-
tion is largely influenced by the frequency characteristics of the
imposed trainload, particularly the so-called ‘‘dominant frequen-
cies’’ in the general case with multiple carriages, and the indicative
‘‘driving frequencies’’ when only a single vehicle/carriage is
involved.
For the special case with a single carriage, the dynamic effect
may be conveniently described in association with the basic driv-ing frequency, which is effectively a nominal frequency of the load
pulse, i.e., V /2Lb. Subsequently, the classical definition of the critical
speed becomes a straightforward ‘‘resonant’’ condition such that
the above driving frequency matches the bridge natural frequency.
With the consideration of the moving carriage mass, it is observed
that the critical speed reduces as the moving mass increases, and
the modified critical speed can be well predicted using the
resonance condition mentioned above, with however the incorpo-
ration of an effective mass-loaded bridge frequency.
For typical trainload with multiple carriages, the dynamic effect
is overwhelmed by the repeated carriage loads; thus the ‘‘domi-
nant frequencies’’ at an interval of V /Lc , which may be viewed as
the normalised speed with respect to the carriage length, becomes
a governing factor. Examination of the frequency spectrum revealsthat the distribution of the spectral peaks among different orders
of the dominant frequencies is not uniform and it depends closely
upon the bridge-to-carriage length ratio, aL = Lb/Lc . As aL increases
the spectral peaks become increasingly more concentrated at the
lowest few dominant frequencies, and when aL is greater than
1.5, the frequency spectrum is effectively dominated by the basic
frequency at V /Lc .
The resonance phenomenon of the bridge response to a typical
trainload with multiple carriages is closely associated with the
above mentioned frequency characteristics. For short bridges such
as the 8-m bridge considered in the paper, significant resonance ef-
fect could occur at more than one resonance speeds, whereas for
longer bridges such as the 40-m bridge, significant resonance
may occur only at one speed when the first order dominant fre-quency matches the (mass-loaded) natural frequency of the bridge.
(a)
0 1 2 3 4-0.1
-0.05
0
0.05
0.1
Time (s)
D e f l e c t i o n ( m )
0 10 20 300
0.005
0.01
0.015
0.02
Frequency (Hz)
F F T a m p l i t u d e
(b)
0 0.5 1 1.5-0.1
-0.05
0
0.05
0.1
Time (s)
D e f l e c t i o n ( m )
0 10 20 300
0.02
0.04
Frequency (Hz)
F F T a m p l i t u d e
Fig. 16. Mid-spandeflection time histories (left) andtheir FFTspectra (right) for twobridge scenarios under resonance speed: (a)8-m bridgeunder resonance speed of 60 m/
s; (b) 40-m bridge under resonance speed of 190 m/s.
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
←8-m bridge ←40-m bridge
n=1
n=2
n=3
n=4
Z
3
←8-m bridge ← 40-m bridge
n=1
n=2
n=3
n=4
Lb / Lc
Fig. 17. Resonance severity indicator, the Z -factor, versus as a function of bridge–carriage length ratio.
Y. Lu et al. / Engineering Structures 42 (2012) 9–22 21

7/27/2019 Frequency characteristics of railway bridge
http://slidepdf.com/reader/full/frequency-characteristics-of-railway-bridge 14/14
For an assessment of the severity of resonance at a potential reso-
nance speed, use can be made of the newly developed Z -factor.
Numerical results demonstrate consistent results with regard to
the resonance effect as compared with the prediction using the
Z -factor.
It is also noteworthy of the abnormal acceleration spikes that
tend to occur when the moving speed approaches the critical
speed. This phenomenon has particular implications for short
bridges, not only because of its relatively more significant effect
but also because of the increased possibility of reaching the critical
speed in such bridges, especially concerning high speed trains.
References
[1] Li JZ, Su MB. The resonant vibration for a simplysupported girder bridge under
high speed trains. J Sound Vib 1999;224(5):897–915.
[2] Li JZ, Su MB, Fan LC. Natural frequency of railway girder bridges under vehicle
loads. J Bridge Eng 2003;8(4):199–203.
[3] Yang YB, Chang KC. Extracting the bridge frequencies indirectly from a passing
vehicle: parametric study. Eng Struct 2009;31(10):2448–59.
[4] Kim BH, Lee J, Lee DH. Extracting modal parameters of high-speed railway
bridge using the TDD technique. Mech Syst Signal Process 2010;24(3):707–20.
[5] Schubert S, Gsell D, Steiger R, Feltrin G. Influence of asphalt pavement on
damping ratio and resonance frequencies of timber bridges. Eng Struct
2010;32(10):3122–9.
[6] Paultre P, Proulx J, Talbot M. Dynamic testing procedures for highway bridges
using traffic loads. J Struct Eng 1995;121(2):362–76.
[7] Fryba L. A rough assessment of railway bridges for high speed trains. EngStruct
2001;23(5):548–56.
[8] Yang YB, Lin CW. Vehicle–bridge interaction dynamics and potential
applications. J Sound Vib 2005;284(1–2):205–26.
[9] Ju JH, Lin HT, Huang JH. Dominant frequencies of train-induced vibrations. J
Sound Vib 2009;319(1–2):247–59.
[10] MaoL, Lu Y. Critical speed and resonance criteria of railway bridge response to
moving trains. J Bridge Eng; in press. http://dx.doi.org/10.1061/
(ASCE)BE.1943-5592.0000336.[11] Xia H, Zhang N, Guo WW. Analysis of resonance mechanism and conditions of
train–bridge system. J Sound Vib 2006;297(3–5):810–22.
[12] Yau JD. Resonance of continuous bridges due to high speed trains. J Mar Sci
Technol 2001;9(1):14–20.
[13] Dinh VN, Kim KD, Warnitchai P. Dynamic analysis of three-dimensional
bridge–high speed train interactions using a wheel–rail contact model. Eng
Struct 2009;31(12):3090–106.
[14] Flener EB, Karoumi R. Dynamic testing of a soil-steel compositerailway bridge.
Eng Struct 2009;31(12):2803–11.
[15] Esmailzadeh E, Ghorashi M. Vibration analysis of beams traversed by uniform
partially distributed moving masses. J Sound Vib 1995;184(1):9–17.
[16] Fryba L. Vibration of solids and structure under moving loads. 3rd
ed. London: Tomas Telford; 1999.
[17] Yang YB, Yau JD, Wu YS. Vehicle–bridge interaction dynamics. World Scientific
Publishing; 2004.
[18] Garinei A, Risitano G. Vibrations of railway bridges for high speed trains under
moving loads varying in time. Eng Struct 2008;30(3):724–32.
22 Y. Lu et al. / Engineering Structures 42 (2012) 9–22