Fpga Review Paper
9
For Peer Review Only FPGA Implementation of a PWM for a Three-Phase Dc-Ac Multilevel Active-Clamped Converter Abstract- With the aim to implement a suitable controller for a three-phase dc-ac multilevel active-clamped converter to enable its use in practice, and as a first step towards a full closed-loop converter control implementation into a single field- programmable gate array (FPGA) device, this paper presents the structure and features of a FPGA implementation of an appropriate pulsewidth modulation (PWM) strategy. The selected PWM strategy guarantees dc-link capacitor voltage balance in every switching cycle and covers both the undermodulation and overmodulation regions. A flexible implementation is conceived, allowing the variation of important operating parameters such as the modulation index and switching frequency through a simple user interface. The key aspects to achieve an efficient and robust FPGA implementation are discussed. Experimental results in a four-level converter prototype controlled with an Altera Cyclone III device under different operating conditions match fairly well the expected results obtained through simulation, thus verifying the accurate performance of the FPGA-based modulator. I. INTRODUCTION Power electronics converter technology evolves towards multilevel topologies with higher number of switching devices, higher switching frequencies to obtain higher power density and better dynamic performance, and increased control complexity. One of such topologies is the recently proposed multilevel active-clamped (MAC) topology [1], shown in Fig. 1(a) for a four-level case, which is built upon a single controlled switching semiconductor device with an antiparallel diode. The functional model of the converter leg is the same as for a diode-clamped converter: a single-pole four-throw switch that connects the output leg terminal to one of the four input leg terminals through the application of the corresponding switching state. Compared to a multilevel diode-clamped converter, which presents a lower controlled switch count, the active-clamped topology advantages are [1]: lower conduction loss, better distribution of switching losses, device blocking voltage always equal to one dc-link capacitor voltage, and increased fault-tolerance capacity. Motor drives, and in particular the traction inverter of electric vehicles, is one of the applications where the MAC topology could bring benefits. For this purpose, three legs can be connected to a common dc-link to obtain the four-level three-phase active- clamped converter of Fig. 1(b). However, in order to take full advantage in practice of the topology benefits, a robust and efficient controller has to be developed at a reasonable cost and with reduced complexity. This is the final goal of the present study. Power converter control has been progressively migrating from the analog to the digital domain [2]. With the improvement of digital control devices and control techniques, in many applications, the inherent drawbacks of digital control (i.e., finite resolution leading to a reduced accuracy and the need of sampling and processing time leading to delays) have been compensated by the advantages: increased control complexity, flexibility, repeatability, reliability, versatility, and expandability. Typical power converter digital controllers are based on microprocessors (μP), digital signal processors (DSP), field- programmable gate-arrays (FPGA), or a combination of them. μPs and DSPs contain a central processing unit (CPU, fixed hardware) in charge of sequentially processing a set of instructions. They are therefore known to be software programmable. Microcontrollers and digital signal controllers embed the μP or DSP core, memory, and input/output peripherals (including PWM units) in the same chip. The programming can be performed with high-level algorithmic languages familiar to most designers. Vdc C C + – + – vC2 v C1 + – C + – vC3 ic R L L L Three MAC Legs i 4 i3 i 2 i1 o 3 o2 o1 c i b RL LL b i a RL LL a 1 2 3 4 + – vab (a) (b) Fig. 1. MAC converter [1]. (a) Four-level leg topology. (b) Four-level three-phase dc-ac converter. Page 1 of 9 http://www.ewh.ieee.org/soc/ies Industrial Electronics Society 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60
-
Upload
charles-siluvaimuthu -
Category
Documents
-
view
215 -
download
2
Transcript of Fpga Review Paper

For Peer Review O
nly
FPGA Implementation of a PWM for a Three-Phase Dc-Ac Multilevel Active-Clamped Converter
Abstract- With the aim to implement a suitable controller for a three-phase dc-ac multilevel active-clamped converter to enable its use in practice, and as a first step towards a full closed-loop converter control implementation into a single field-programmable gate array (FPGA) device, this paper presents the structure and features of a FPGA implementation of an appropriate pulsewidth modulation (PWM) strategy. The selected PWM strategy guarantees dc-link capacitor voltage balance in every switching cycle and covers both the undermodulation and overmodulation regions. A flexible implementation is conceived, allowing the variation of important operating parameters such as the modulation index and switching frequency through a simple user interface. The key aspects to achieve an efficient and robust FPGA implementation are discussed. Experimental results in a four-level converter prototype controlled with an Altera Cyclone III device under different operating conditions match fairly well the expected results obtained through simulation, thus verifying the accurate performance of the FPGA-based modulator.
I. INTRODUCTION
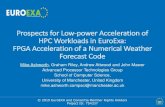
Power electronics converter technology evolves towards multilevel topologies with higher number of switching devices, higher switching frequencies to obtain higher power density and better dynamic performance, and increased control complexity. One of such topologies is the recently proposed multilevel active-clamped (MAC) topology [1], shown in Fig. 1(a) for a four-level case, which is built upon a single controlled switching semiconductor device with an antiparallel diode. The functional model of the converter leg is the same as for a diode-clamped converter: a single-pole four-throw switch that connects the output leg terminal to one of the four input leg terminals through the application of the corresponding switching state. Compared to a multilevel diode-clamped converter, which presents a lower controlled switch count, the active-clamped topology advantages are [1]:
lower conduction loss, better distribution of switching losses, device blocking voltage always equal to one dc-link capacitor voltage, and increased fault-tolerance capacity. Motor drives, and in particular the traction inverter of electric vehicles, is one of the applications where the MAC topology could bring benefits. For this purpose, three legs can be connected to a common dc-link to obtain the four-level three-phase active-clamped converter of Fig. 1(b). However, in order to take full advantage in practice of the topology benefits, a robust and efficient controller has to be developed at a reasonable cost and with reduced complexity. This is the final goal of the present study.
Power converter control has been progressively migrating from the analog to the digital domain [2]. With the improvement of digital control devices and control techniques, in many applications, the inherent drawbacks of digital control (i.e., finite resolution leading to a reduced accuracy and the need of sampling and processing time leading to delays) have been compensated by the advantages: increased control complexity, flexibility, repeatability, reliability, versatility, and expandability.
Typical power converter digital controllers are based on microprocessors (µP), digital signal processors (DSP), field-programmable gate-arrays (FPGA), or a combination of them.
µPs and DSPs contain a central processing unit (CPU, fixed hardware) in charge of sequentially processing a set of instructions. They are therefore known to be software programmable. Microcontrollers and digital signal controllers embed the µP or DSP core, memory, and input/output peripherals (including PWM units) in the same chip. The programming can be performed with high-level algorithmic languages familiar to most designers.
Vdc C
C
+
–
+
–
vC2
vC1
+
–
C +
–vC3
ic
RL LL
Three MAC Legs
i4
i3
i2
i1
o3
o2
o1
c
ib
RL LL b
ia
RL LL a
1
2
3
4
+
–
vab
(a) (b) Fig. 1. MAC converter [1]. (a) Four-level leg topology. (b) Four-level three-phase dc-ac converter.
Page 1 of 9
http://www.ewh.ieee.org/soc/ies
Industrial Electronics Society
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

For Peer Review O
nly
FPGAs [3] basically contain an array of logic elements or cells (each cell containing look-up tables and registers), whose interconnections are decided by the contents of a random access memory (RAM). The FPGA design, typically using hardware description languages, decides the final circuit structure to achieve a desired functionality and it is therefore said to be hardware programmable. Besides a large number of configurable input/output blocks, FPGAs also typically contain additional optimized RAM blocks and multipliers to increase the performance of the device. Logic, adders, subtractors, comparators, multipliers, and special functions are easy to implement in these typical FPGAs. Special functions are implemented using look-up tables in RAM blocks. However, RAM size increases exponentially with the resolution of the input variables. Multipliers and dividers by powers of two are immediate. Nevertheless, general dividers are more complex. The hardware programmability of FPGAs allows both the concurrent or parallel processing of data and pipelining, which may dramatically reduce the required processing time and increase the number of computations per switching cycle, compared to µPs and DSPs. Additionally, in cases where the implementation of the desired control benefits from the use of a CPU, this can be embedded within the FPGA through the programming of the corresponding circuit. FPGAs have been employed in the control of a number of different topologies and applications [4]-[40], but specially for the control of multilevel converters [17]-[40] and the implementation of PWMs ([4]-[9], [18], [20]-[37], [40]), predictive controls ([10], [38], [39]), and fault-tolerant controls [14].
Due to wide device availability and familiarity with software programming, µP and DSP were the preferred designer’s choice in the first digital control implementations. As control requirements became more stringent from the point of view of processing time and number of PWM outputs, many designers opted for a combination of a µP or DSP with a FPGA ([13], [17], [35]). The sequential processor is in charge of the high level control tasks, while the FPGA typically implements the PWM strategy and subsequent switch control signal generation. One critical reason to combine two devices is that current microcontrollers do not contain enough PWM units to control multilevel converters. This is not the case of FPGAs, which contain a large number of possible output pins that can be controlled precisely to generate the switch control signals.
Due to the FPGA inherent advantages and expected future improvements, the authors foresee a progressive trend towards a full closed-loop converter control implementation within a single FPGA. In addition to performance improvements, this also saves costs and avoids the cumbersome synchronization and communication between the µP or DSP and the FPGA. Therefore, a full FPGA-based implementation of a three-phase dc-ac MAC converter controller is concluded to be the best choice. The authors final goal is to implement a closed-loop controller with relevant voltages and currents sampled as close as possible to
the beginning of the switching cycle where these values are applied. As a first step, in this paper, the controller is implemented in open-loop with the same philosophy: updating the PWM variables as close as possible to the beginning of the switching cycle. The description of the remaining closed-loop control implementation will be presented in a complementary future publication.
The paper is organized as follows. Section II reviews the PWM strategy and presents a suitable algorithm from which the FPGA implementation can be discussed. Section III explains the implementation structure and relevant design details to obtain an efficient and robust controller. In Section IV, simulation and experimental results are compared to verify the good performance of the designed modulator under different operating conditions. Finally, Section V presents the conclusions.
II. PWM STRATEGY
The PWM presented in [41] and extended to the overmodulation region in [42] is selected to operate the converter in Fig. 1(b). This PWM, originally defined applying the virtual-vector concept, guarantees the dc-link capacitor voltage balance in every switching cycle and all operating conditions, as long as the phase currents are approximately constant over the switching cycle and their addition is equal to zero. This allows minimizing the size of the dc-link capacitors, leading to a high converter power density. The PWM assumes that the switching frequency (fs = 1/ts, where ts is the switching or sampling period) is much larger than the fundamental frequency. This PWM allows modulation index values m [0, 1.1027], where m = vab,1,pk/Vdc and vab,1,pk is the peak value of the fundamental component of the line-to-line converter voltage. Therefore, it covers both the undermodulation (UM) and overmodulation (OM) ranges up to six-step operation. The overmodulation region is further divided into two subregions (OMI and OMII) with different type of applied reference vector trajectories [42].
This PWM can be defined with the following algorithm. First of all, from the desired reference vector normalized length and angle (m* and *, respectively), the values of the applied length and first-sextant equivalent angle (m, 1) are determined as
m*maxI = 3·ln(3)/
m*maxII = (2/)·sqrt(3)
(1)
sexta = 1+floor(*/(/3)) sextb = mod(sexta+4, 6) sextc = mod(sexta+2, 6) *
1 = mod(*, /3)
(2)
Page 2 of 9
http://www.ewh.ieee.org/soc/ies
Industrial Electronics Society
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

For Peer Review O
nly
if (m* > hbc·m*
maxII){ m* = hbc·m*
maxII
}end
mode = 01 m = m* 1 = *
1 if (hbc < m* hbc·m*
maxI){ mode = 00; lim = (/6)·(1–(m*–hbc)/(hbc·m*
maxI–hbc)) km1 = hbc/sin(lim+/3) km2 = 1/sin(*
1+/3) if (lim < *
1 /3–lim){ m = hbc·km2 }else{ m = km1 }end }elseif (hbc·m*
maxI < m* hbc·m*maxII){
mode = 10 lim=/6·(m*–hbc·m*
maxI)/(hbc·m*maxII–hbc·m*
maxI) km1 = hbc·2/sqrt(3) km2 = 1/sin(*
1+/3) if (*
1 < lim){ m = km1 1 = 0 }elseif (*
1 /3–lim){ m = km1 1 = /3 }else{ m = hbc·km2 }end }end,
(3)
where hbc 1 is an special parameter that regulates the capacitor voltage balance control margin in the overmodulation region [42].
Next, the value of auxiliary variables tα, tβ, t, and t are computed as
.21
6cos,2
6cos,2
1tst
1tαstα
tt
ttt
ktkmt
ktkmt
(4)
These auxiliary variables will be used to define the final dwell times of connection to the dc-link terminals t1, t2, t3, and t4, with reference to Fig. 2. But previously, they need to be modified so that final dwell times fall into a specified value range, as will be commented later: .,,,,,,, 2m1mmmm ttttfttttt (5)
Finally, the leg x {a, b, c} dwell times of connection of the leg output terminal to each input terminal are determined with the simple assignments indicated in Table I.
TABLE I LEG DWELL-TIMES COMPUTATION
sextx Leg x dwell times 1 t1 = 0 t2 = tm2 t3 = tm2 t4 = tβm 2 t1 = tm t2 = tm1 t3 = tm1 t4 = tαm 3 t1 = tβm t2 = tm2 t3 = tm2 t4 = 0 4 t1 = tβm t2 = tm2 t3 = tm2 t4 = 0 5 t1 = tαm t2 = tm1 t3 = tm1 t4 = tm 6 t1 = 0 t2 = tm2 t3 = tm2 t4 = tβm
i4
i3
i2
i1
t4 t4
t3 t3
t2 t2 2·t1
sn11 tbh
sp11 tbh
tbh
tbh
sp12 tbh tbh
sp13 td td
sn21 tbh
sn22 td
tbh
sp21 tbh tbh
sp22 td td
td
sn31 tbh
sn32
tbh
tbh
sn33
tbhsp31
td
tbh
td
tbh
Leg
out
put t
erm
inal
co
nnec
tion
n·ts (n+1)·ts
t
Fig. 2. Distribution of the leg output terminal connections over a switching cycle and corresponding switch control signals (high level: switch on; low level: switch off).
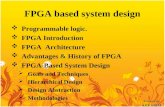
Fig. 3 illustrates the resulting leg duty-ratio pattern (di = 2·ti/ts) over a line cycle for four different values of m*. The other two legs have the same duty-ratio pattern but phase shifted 120˚.
The distribution of the leg output terminal connections over a switching cycle and the generation of the twelve switch control signals is performed according to Fig. 2, where tbh = tb/2 is half of the blanking time required between the turn-off of a set of devices and the turn-on of others to produce a change of the leg switching state; and td is a delay time used whenever several switch control signals change concurrently, so that switching losses of a transition between switching states concentrate on one specific switch (the one that turns on first or the one that turns off last, depending on the current polarity).
In this paper, the correction in (5) is made so that final dwell times verify
t2 , t3 [2·tb, ts/2] t1 , t4 {0 , [2·tb, ts/2 4·tb]}.
(6)
It is forced that t2, t3 ≥ 2·tb to avoid direct transitions of the leg output terminal connection between nonadjacent input terminals. It is further requested that t1, t4 ≥ 2·tb whenever they are not zero, to avoid narrow gate pulses.
Page 3 of 9
http://www.ewh.ieee.org/soc/ies
Industrial Electronics Society
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

For Peer Review O
nly0 60 120 180 240 300 360
0
0.2
0.4
0.6
0.8
1
* [degrees]
d1
d2 = d3
d4
(a)
0 60 120 180 240 300 3600
0.2
0.4
0.6
0.8
1
* [degrees]
d1
d2 = d3
d4
(b)
0 60 120 180 240 300 3600
0.2
0.4
0.6
0.8
1
* [degrees]
d1
d2 = d3
d4
(c)
0 60 120 180 240 300 3600
0.2
0.4
0.6
0.8
1
* [degrees]
d1
d2 = d3
d4
(d)
Fig. 3. Leg ‘a’ duty-ratio pattern over a line cycle (hbc =0.98). (a) m* = 0.25. (b) m* = 0.75. (c) m* = 1.0. (d) m* = 1.05.
III. PWM IMPLEMENTATION
The previous PWM strategy is implemented into an Altera Cyclone III EP3C16F484C6 FPGA device with a 50 MHz oscillator, mounted on a DE0 development and education board from Terasic. The device architecture structure and functionality has been fully described in very-high-speed integrated-circuit hardware description language (VHDL). The simulation has been performed with ModelSim software from Mentor Graphics. The synthesis has been performed with Quartus II software from Altera. Simulation results have been compared to the results obtained from Matlab-Simulink simulations. The main PWM parameters are set to be user-configurable through ten slide switches (SdS) to introduce the
parameter code and value, and one pushbutton switch (PBS) to validate the data while the converter is in the off state. Table II lists these parameters, their value range and resolution, from which it can be easily derived a 158 Hz to 625 kHz range of possible switching frequencies. This allows thoroughly testing the implemented modulator performance under a wide range of operating conditions and power hardware prototypes. Two additional PBS are used to turn-on/off the converter and to reset the system.
A. Basic Design Aspects Variable values are represented in fixed-point format to
reduce hardware needs. Identification of symmetries, value offset, and value scaling are applied whenever possible to minimize the number of bits required to obtain a specified resolution.
All operations in the algorithm of Section II are easy to implement, except for divisions and transcendental functions. Expression (1) contains simple constants that can be precalculated. Expression (2) highlights the sixty-degree symmetry of the algorithm. The divisions and trigonometric functions in (3) require a detailed analysis to obtain the simplest implementation. Fig. 4 deploys the pattern for km2, ktα, and ktβ, from which 30-degree symmetries, proper offset values, and proper scaling values can be identified.
A basic time unit equal to td is defined. A clock signal with period td is generated to control most of the FPGA processing. All time variables are expressed as an integer number of this basic unit or power-of-two multiples of this unit. 16-bit counters are necessary to count td units over a whole switching cycle.
A basic angle unit (au) is defined so that each switching cycle corresponds to an integer number of au for every combination of fo, td, tb, and ts parameter values. This reduces to one simple addition modulus a sextant the calculation of the next switching cycle angle.
TABLE II CONFIGURABLE PWM PARAMETERS
Parameter name
Description Range Resolution
fo Fundamental ac frequency [5, 200] Hz 5 Hz m* Modulation index [0.01, 1.10] 0.01
hbc Hexagonal boundary compression factor
[0.7,1.0] 0.01
td Delay time [20, 100] ns 20 ns tb Blanking time [4, 62]·td 2·td ts Switching period [20, 1020]·tb 4·tb
0 10 20 30 40 50 600
0.2
0.4
0.6
0.8
1
1.2
*1 or 1 [degrees]
km2
ktα
ktβ
Fig. 4. Parameters km2, ktα, and ktβ as a function of *
1 or 1.
Page 4 of 9
http://www.ewh.ieee.org/soc/ies
Industrial Electronics Society
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

For Peer Review O
nly
On the other hand, to maximize the resolution for a given number of bits, one sextant of a line cycle must correspond to a number of au slightly lower than a power of two. It is finally set that one sextant contains 1,875,000 au. Thus, all angles lower than 60 degrees can be represented with 21 bits.
B. Controller Structure and Module Description The designed controller structure, applying concurrent
processing as much as possible, is depicted in Fig. 5. It is composed of a set of blocks or modules, classified as auxiliary (A1-A6) and main (M1-M11) modules. The applied variable value offset and scaling to optimize the implementation is not explicitly shown in the diagram.
From the 50 MHz system clock signal clk50M, having a period tck = 20 ns, module A1 generates the clock signal clktd, with period td, used in most of the relevant processes. Module A2 applies simple logic to generate a synchronous system reset signal rst from the state of the corresponding PBS. Module A3 samples at low frequency the value of the signals generated by the other two PBS and A4 generates a pulse of length td in the output signal whenever a rising edge occurs in the corresponding input signal. Finally, modules A5 and A6 are in charge of generating the required signals to show in three seven-segment displays the code and stored value (more significant hexadecimal digit (MSD) and less significant hexadecimal digit (LSD)) of a given system parameter, determined by the position of the slide switches.
Module M1 updates the registered value of a given system parameter, defined by the 10 SdS, whenever the data
validation PBS is pressed. The values are expressed and stored in the units indicated within brackets in the block output signals. Parameter limits and coherence are checked. Before proceeding to store a new value, it is first verified that
fo[5 Hz]·ts[4tb]·tb[2td]·td[tck] 50,000 (7)to guarantee a minimum of 25 switching cycles per line cycle. It is also verified that m* hbc·m*
maxII. On the other hand, two additional parameters are calculated as
ts[8td]= ts[4tb]·tb[2td] ∆*[au]= 9·fo[5 Hz]·ts[4tb]·tb[2td]·td[tck],
(8)
where ∆* is the increment of * corresponding to one switching cycle.
Module M2 updates the value of *1 according to ∆* as
close as possible to the end of the switching cycle, and generates a set of signals (cntts_0..cntts_4) to control the timing of the PWM variable value updates, as indicated in Fig. 6.
Modules M3 and M4 are read-only memories (ROM) plus a little logic that determine the operating mode (UM, OMI, or OMII), the characteristic angle lim in the OM (crossover or holding angle), and parameters km1 and km2 defining the applied instantaneous modulation index in the OM. M3 outputs are constant for constant m* and hbc, while the M4 output changes every switching cycle. M3 requires a capacity of 512 x 32 bits and it is implemented with two 9 Kb memory blocks. M4 requires a capacity of 4,096 x 9 bits and is implemented with four 9 Kb memory blocks.
clk50M
Clktd Generator
Reset Generator
[PBS] rst rst
clktd
25 Hz Pushbutton Sampling
rdata_val ronoff
Edge Detector & Synchronization
edata_val
eonoff
Parameter Update
On-Off State Machine
[PBS] onoff [PBS] data_val
td [tck]tb [2td] = tbh [td] ts [4tb]
fo [5 Hz] hbc [0.01] m* [0.01]
Selector
system_state
*[au]
ts[8td]
[SdS] data Param_code
Param_MSD
0x to 7s
0x to 7s 0x to 7s
code_7s
MSD_7s
LSD_7s
mode
lim
km1
Logic + ROM Operating mode, lim, km1
*1 Update
& Timing Control
*1
sexta sextb sextc cntts_2 cntts_3 cntts_4
ROM km2
Selector
1
m
m·ts
ROM kt/100
ROM kt/100
t [td]
t [td]
Leg Switch-
Control-Signal Generator
sanij
Logic
t [td] Modification
tm
tm2
tm
tm
tm1
Param_LSD
10
k m2
sapij
6
6
sbnij
sbpij
6
6
scnij
scpij
6
6
Leg Switch-Control-Signal
Generator
Leg Switch-Control-Signal
Generator
t [td]
A2
A3 A4
A1
M3
M2
A6
A6
A6
M1
M4
A5
M5
M7
M6
M8
M9
M10
M10
M10
M11
Fig. 5. FPGA-controller global structure.
Page 5 of 9
http://www.ewh.ieee.org/soc/ies
Industrial Electronics Society
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

For Peer Review O
nlycntts_0
cntts_1
cntts_2
cntts_3
cntts_4
clktd
8·ts1 cntts 0 1 2 3 4 3+tbh
*
End of t4 or t3;
ti update
t4_0 update
*1
update ROM
addresses update
4+tbh 3+2·tbh
End of ts
Start of t4 or t3
tbh tbh
4+2·tbh
t1_0 update
Fig. 6. Timing of events before the beginning of a new switching cycle.
Based on the values of mode and lim, M5 selects the proper values of m and 1 among the three possible. After this, and with the aid of multipliers and ROM modules M6 and M7, the value of tα and tβ, expressed in td units with 15 bits, are obtained. Through simple algebraic operations M8 computes t and t. Then, M9 modifies this set of time values so as to verify (6). The criteria followed to perform this modification are to maintain, whenever possible, the produced switching-cycle-averaged leg output-terminal voltage vo1, and to reduce the number of switching transitions. A robust modification requires a detailed analysis of the multiple possible cases and generates two possible modified values of t: tm1 for sextants 2 and 5 in Table I, and tm2 for the rest. M6 requires a capacity of 8,192 x 12 bits and is implemented with twelve 9 Kb memory blocks. Considering offsets and symmetries (see Fig. 4), M7 requires a capacity of 4,096 x 9 bits and is implemented with four 9 Kb memory blocks.
From the above information, M10 is in charge of generating the 12 switch control signals for one leg. Fig. 7 presents the internal block diagram of M10. Module M10A is in charge of updating and storing the t1, t2, t3, and t4 values for the next switching cycle (refer to Fig. 2) at the time defined in Fig. 6, and according to Table I. Two more bits are generated, t1_0 and t4_0, which indicate whether t1 and t4 are equal to zero, respectively. These values are updated as indicated in Fig. 6. All this information is fed to M10B, which contains a state machine in charge of determining the leg switching state, presented in Fig. 8. The name of the 27 states in Fig. 8 is defined with reference to the switching state of connection of the leg output terminal to the jth input terminal ssj. The state is further identified by the output values of the 10 independent switch control signals sn11-(sp11=sp12)-sp13-sn21-sn22-sp21-sp22-(sn31=sn32)-sn33-sp31 (in red) and two additional bits (black) to differentiate states with the same switch control signal values. It is interesting to note that the transition from one switching cycle to the next must be handled properly in accordance to the t4_0 value of the old and new switching cycles (there are four different transitions). The module output switching_state defined by the 10 red bits is then fed to M10C, which generates the 12 switch control signals and masks the values of some switch control signals during the global system turn-on and turn-off transitions, to avoid a possible switch overvoltage during these transients [43].
ti Memory
snij
spij
system_state
sextantcntts_2cntts_3cntts_4
tm
tbh
tmtm1
tm2tm
clktd
t1 t2 t3 t4
t1_0 t4_0
Switching-State Distribution
State Machine switching_state
Switch Control Signal
Masking
M10A M10B
M10C
Fig. 7. Leg switch-control-signal generator module structure.
The global on-off state of the system is controlled by the state machine of M11, presented in Fig. 9. The red bits in each state define the system_state output of M11. They represent, from left to right and with reference to Fig. 1(a), the masking bit for the switches in pole 3 (this bit is also the td counter enable in M10B), the masking bit for pole 2, the masking bit for pole 1, and the counter cntts enable in M2. In the transition from OFF to ON states, first pole 1 is enabled, then pole 2 is enabled, and finally pole 3 is enabled. This sequence of events is reversed in the transition from ON to OFF.
C. Consumed FPGA Resources An special effort has been made in the design to save
FPGA resources. Table III indicates the resources used to synthesize the previous controller, as reported by Quartus II software. These resources represent roughly around 20% of the total FPGA resources, leaving enough space to implement a full closed-loop converter controller, including the closed-loop control of the dc-link capacitor voltages and three-phase currents. A reduced number of resources will be necessary if a fixed value of Table II parameters is assumed, which is typically the case in practical applications.
IV. SIMULATION AND EXPERIMENTAL RESULTS
The previous FPGA-based control has been tested with a three-phase dc-ac converter configuration feeding a three-phase series R-L load, as shown in Fig. 1(b). The converter prototype with the DE0 board on top, containing the Altera Cyclone III EP3C16F484C6 FPGA, is presented in Fig. 10.
Fig. 11 presents the experimental switch control signals and output voltage of one leg, which follows the pattern described in Fig. 2. Note that the analog vo1 voltage waveform is delayed with reference to the digital switch control signals due to gate driver and measurement delays. Since the converter is non-ideal and it is operating in open-loop, there is some unbalance among the capacitor voltages that could be easily corrected with the introduction of a closed-loop control [44].
Figs. 12 and 13 present simulation and experimental results at different modulation indexes, covering the UM and OM ranges. Matlab-Simulink is used to perform the simulations. The obtained experimental results fairly match those from simulation, verifying the accurate performance of the programmed controller.
Page 6 of 9
http://www.ewh.ieee.org/soc/ies
Industrial Electronics Society
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

For Peer Review O
nly
ss2 to ss3 A 011010011001
Δt = t2-2·tbh
Δt = 2·tbh-2
Δt = 1
Δt = 1 & cntts_4
Second ss4 011001100101
ss3 to ss4 A 011001101001
Second ss3 011001111001
Δt = 1
Δt = t3-2·tbh & (cntts_3 & t4_0)'
Δt = t3-2·tbh & (cntts_3 & t4_0)
ss3 to ss4 B 011001100001
Δt = 2·tbh-1
Δt = 1 & (cntts_4)'
First ss4
011001100100
ss4 to ss3 A 011001100000
ss4 to ss3 B 011001101000
First ss3
011001111000
Δt = t4-2·tbh Δt = 2·tbh-1
system_state = OFF & t4_0
Δt = 1
Δt = 2·tbh
New ts
Initial State 000000000000
ss4 to ss3
011001100010
ss4 to ss4
011001100111
ss3 to ss4
011001100011
ss3 to ss3
011001111011
Δt = 2·tbh-1
Δt = 2·tbh
rst
ss3 to ss2 A 011000111000
ss3 to ss2 B 011000011000
Δt = t3-2·tbh
Δt = 1
Δt = 2·tbh
ss3 to ss2 C 011010011000
Δt = 1 First ss2
011110011000
Second ss2 011110011001
Δt = 1
ss2 to ss2
011110011011
ss2 to ss1 B 000110011000
ss2 to ss1 A 001110011000
ss1 to ss2 A 000110011001
ss1 to ss2 B 001110011001
Δt = 1
ss1
100110011000
Δt = 2·tbh-1
Δt = 2·tbh-2
ss2 to ss3 B 011000011001
ss2 to ss3 C 011000111001
system_state = OFF & (t4_0)'
Δt = 2·tbh
Δt = t2-2·tbh & (t1_0)'
Δt = t2-2·tbh & t1_0 Δt =2·tbh-1
Δt = 2·t1-2·tbh
Δt = t4-2·tbh & (t4_0)'
Δt = t4-2·tbh & t4_0
Fig. 8. Switching-state distribution finite state machine.
OFF
00000
Pole 1 ON & Wait 00100
Pole 3 OFF
01110
Pole 2 OFF
00110
Pole 1 ON & Count 00101
Pole 2 ON
01101
ON 11101
fonoff & (tbh ≠ 2) Δt = 2·(tbh–2)
fonoff & (tbh = 2)
Δt = 4
fonoff
Δt = 2·tbh
Δt = 2·tbh
Δt = 2·tbh
rst
Fig. 9. System on-off finite state machine.
TABLE III CONSUMED FPGA RESOURCES
Resource Amount Used / Total Available
Logic elements 2,466 / 15,408 (16%) Combinational functions 2,465 / 15,408 (16%) Dedicated logic registers 355 / 15,408 (2%) Pins 72 / 347 (21%) Memory bits 170,730 / 516,096 (33%) Embedded Multiplier 9-bit elements 21 / 112 (19%) PLLs 0 / 4 (0%)
Fig. 10. Experimental prototype combining DE0 development and educational board with a four-level three-phase dc-ac converter prototype using 100 V breakdown voltage metal-oxide-semiconductor field-effect transistors.
Page 7 of 9
http://www.ewh.ieee.org/soc/ies
Industrial Electronics Society
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

For Peer Review O
nly
vo1
sn11 sp11 sp12 sp13 sn21 sn22 sp21 sp22 sn31 sn32 sn33 sp31
Fig. 11. Experimental leg output terminal voltage vo1 and switch control signals. Conditions: Vdc = 150 V, fo= 50 Hz, m* = 0.8, td=100 ns, tb = 600 ns, ts = 19.2 µs (fs 52 kHz).
V. CONCLUSION
A full FPGA-based controller implementation is concluded to be the best choice to enable the practical use of multilevel active clamped converters and take full advantage of their potential benefits at a reasonable cost. A suitable PWM to operate a four-level three-phase dc-ac active-clamped converter featuring 36 switching devices with independent gate control signals has been efficiently and robustly implemented into a medium performance FPGA, consuming only a limited amount of resources. The remaining FPGA resources can be employed to implement typical closed-loop controls for different applications with a high dynamic performance, and also dynamically reconfiguring the control in runtime, which can be useful, for instance, in implementing fault-tolerant controls [45].
0 5 10 15 20-200
0
200
0 10 20 30 40 500
20
40
0 5 10 15 20-10
0
10
t [ms]
v ab
[V]
i a, i
b, i c
[A
]
ib ia ic
v ab
[Vrm
s]
f [kHz]
t [ms]
80 Vrms
0 5 10 15 20-200
0
200
0 10 20 30 40 500
20
40
0 5 10 15 20-10
0
10
t [ms]
v ab
[V]
i a, i
b, i c
[A
]
ib ia ic
v ab
[Vrm
s]
f [kHz]
t [ms]
106 Vrms
0 5 10 15 20-200
0
200
0 10 20 30 40 500
20
40
0 5 10 15 20-10
0
10
t [ms] v a
b [V
] i a
, ib,
i c [
A] ib ia ic
v ab
[Vrm
s]
f [kHz]
t [ms]
111 Vrms
(a) (b) (c) Fig. 12. Simulation results of the line-to-line output voltage vab, fast Fourier transform (FFT) of vab, and phase currents ia, ib, and ic. Conditions: hbc = 0.98, fo=
50 Hz, fs = 10 kHz, td=100 ns, tb = 1 µs, Vdc = 150 V, C = 155 F, RL = 16.5 , LL = 10 mH. (a) UM, m* = 0.75. (b) OMI, m* = 1.0. (c) OMII, m* = 1.05.
ia ib ic
vab
vab
ia ib ic
vab
vab
ia ib ic
vab
vab
(a) (b) (c) Fig. 13. Experimental results of vab, FFT of vab, ia, ib, and ic. Same conditions as in Fig. 11. (a) UM, m* = 0.75. (b) OMI, m* = 1.0. (c) OMII, m* = 1.05.
REFERENCES
[1] S. Busquets-Monge and J. Nicolas-Apruzzese, "A multilevel active-clamped converter topology - Operating principle," IEEE Trans. Industrial Electron., vol. 58, pp. 3868-3878, Sep. 2011.
[2] C. Buccella, C. Cecati, and H. Latafat, "Digital control of power converters - A survey," IEEE Trans. Industrial Informat., vol. 8, pp. 437-447, 2012.
[3] E. Monmasson and M. N. Cirstea, "FPGA design methodology for industrial control systems - A review," IEEE Trans. Industrial Electron., vol. 54, pp. 1824-1842, 2007.
[4] D. Puyal, L. A. Barragan, J. Acero, J. M. Burdio, and I. Millan, "An FPGA-based digital modulator for full- or half-bridge inverter control," IEEE Trans. Power Electron., vol. 21, pp. 1479-1483, 2006.
[5] S. C. Huerta, A. de Castro, O. Garcia, and J. A. Cobos, "FPGA-based digital pulsewidth modulator with time resolution under 2 ns," IEEE Trans. Power Electron., vol. 23, pp. 3135-3141, 2008.
[6] M. G. Batarseh, W. Al-Hoor, L. Huang, C. Iannello, and I. Batarseh, "Window-masked segmented digital clock manager-FPGA-based digital pulsewidth modulator technique," IEEE Trans. Power Electron., vol. 24, pp. 2649-2660, 2009.
[7] A. de Castro and E. Todorovich, "High resolution FPGA DPWM based on variable clock phase shifting," IEEE Trans. Power Electron., vol. 25, pp. 1115-1119, 2010.
Page 8 of 9
http://www.ewh.ieee.org/soc/ies
Industrial Electronics Society
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

For Peer Review O
nly
[8] D. Navarro, O. Lucia, L. A. Barragan, J. I. Artigas, I. Urriza, and O. Jimenez, "Synchronous FPGA-based high-resolution implementations of digital pulse-width modulators," IEEE Trans. Power Electron., vol. 27, pp. 2515-2525, 2012.
[9] A. Agarwal and V. Agarwal, "FPGA realization of trapezoidal PWM for generalized frequency converter," IEEE Trans. Industrial Informat., vol. 8, pp. 501-510, 2012.
[10] M. Curkovic, K. Jezernik, and R. Horvat, "FPGA-based predictive sliding mode controller of a three-phase inverter," IEEE Trans. Industrial Electron., vol. 60, pp. 637-644, 2013.
[11] P. S. B. Nascimento, H. E. P. de Souza, F. A. S. Neves, and L. R. Limongi, "FPGA implementation of the generalized delayed signal cancelation -- phase locked loop method for detecting harmonic sequence components in three-phase signals," IEEE Trans. Industrial Electron., vol. 60, pp. 645-658, 2013.
[12] C. A. Sepulveda, J. A. Munoz, J. R. Espinoza, M. E. Figueroa, and P. E. Melin, "All-on-chip dq-frame based D-STATCOM control implementation in a low-cost FPGA," IEEE Trans. Industrial Electron., vol. 60, pp. 659-669, 2013.
[13] S.-H. Hwang, X. Liu, J.-M. Kim, and H. Li, "Distributed digital control of modular-based solid-state transformer using DSP+FPGA," IEEE Trans. Industrial Electron., vol. 60, pp. 670-680, 2013.
[14] M. Shahbazi, P. Poure, S. Saadate, and M. R. Zolghadri, "Fault-tolerant five-leg converter topology with FPGA-based reconfigurable control," IEEE Trans. Industrial Electron., vol. 60, pp. 2284-2294, 2013.
[15] W. Naouar, E. Monmasson, A. Naassani, and I. Slama-Belkhodja, "FPGA-based dynamic reconfiguration of sliding mode current controllers for synchronous machines," IEEE Trans. Industrial Informat., to be published.
[16] D. Navarro, O. Lucia Gil, L. Barragan, I. Urriza, and O. Jimenez, "High-Level Synthesis for Accelerating the FPGA Implementation of Computationally-Demanding Control Algorithms for Power Converters," IEEE Trans. Industrial Informat., to be published.
[17] M. Alonso, F. Huerta, C. Giron, E. Bueno, A. Hernandez, F. J. Rodriguez, and S. Cobreces, "Industrial control system for a back-to-back multilevel NPC converter based on DSP and FPGA," in Proc. IEEE Int. Symp. on Industrial Electron., 2007, pp. 2358-2363.
[18] O. Lopez, J. Alvarez, J. Doval-Gandoy, F. D. Freijedo, A. Nogueiras, A. Lago, and C. M. Penalver, "Comparison of the FPGA implementation of two multilevel space vector PWM algorithms," IEEE Trans. Industrial Electron., vol. 55, pp. 1537-1547, 2008.
[19] F. Salim and N. A. Azli, "Development of an FPGA-based gate signal generator for a multilevel inverter," in Proc. Int. Conf. on Power Electron. and Drive Systems, 2003, pp. 402-405.
[20] C. Sanabria and S. Ramirez, "PWM switching patterns optimization for multilevel inverter using a FPGA," in Proc. IEEE Int. Power Electron. Congress, 2004, pp. 207-211.
[21] G. Ebersohn and M. N. Gitau, "FPGA-implemented carrier based SPWM multilevel controller," in Proc. Conf. in Africa, 2004, pp. 1175-1178.
[22] C. Cecati, A. Dell'Aquila, A. Lecci, M. Liserre, and V. G. Monopoli, "FPGA-based multilevel modulations for H-bridge-based converters," in Proc. IEEE Int. Symp. on Industrial Electron., 2004, pp. 957-962.
[23] T. Liu, Q. Song, W. Liu, Y. Chen, and J. Li, "FPGA-based universal multilevel space vector modulator," in Proc. IEEE Industrial Electronics Soc. Conf., 2005, pp. 745-749.
[24] S. Mekhilef and A. Masaoud, "Xilinx FPGA based multilevel PWM single phase inverter," in Proc. IEEE Int. Conf. on Industrial Technology, 2006, pp. 259-264.
[25] L. Wang and W. Wu, "FPGA based multichannel PWM pulse generator for multi-modular converters or multilevel converters," in Proc. IEEE Int. Power Electron. and Motion Control Conf., 2006, pp. 1-5.
[26] N. A. Azli, L. Y. Teng, and P. Y. Lim, "Implementation of a single-carrier multilevel PWM technique using field programmable gate array (FPGA)," in Proc. Int. Conf. on Power Electron. and Drive Systems, 2007, pp. 836-841.
[27] N.-Y. Dai, M.-C. Wong, F. Ng, and Y.-D. Han, "A FPGA-based generalized pulse width modulator for three-leg center-split and four-
leg voltage source inverters," IEEE Trans. Power Electron., vol. 23, pp. 1472-1484, 2008.
[28] M. I. Ahmad, Z. Husin, R. B. Ahmad, H. A. Rahim, M. S. Abu Hassan, and M. N. Md Isa, "FPGA based control IC for multilevel inverter," in Proc. Int. Conf. on Computer and Communication Engineering, 2008, pp. 319-322.
[29] H. Xu and J. Li, "FPGA based multiplex PWM generator for multilevel converters applied wind power generator," in Proc. Asia-Pacific Power and Energy Engineering Conf., 2009, pp. 1-4.
[30] E. F. F. Lima, N. P. Filho, and J. O. P. Pinto, "FPGA implementation of space vector PWM algorithm for multilevel inverters using non-orthogonal moving reference frame," in Proc. IEEE Int. Electric Machines and and Drives Conf., 2009, pp. 709-716.
[31] J. Han, T. Tang, B. Pu, Y. Xu, C. Liu, X. Wei, and Y. Gao, "FPGA based hybrid cascade multilevel converter," in Proc. IEEE Int. Symp. on Industrial Electron., 2009, pp. 494-498.
[32] P. Karuppanan and K. K. Mahapatra, "FPGA based cascaded multilevel pulse width modulation for single phase inverter," in Proc. Int. Conf. on Environment and Electrical Engineering, 2010, pp. 273-276.
[33] C. Cecati, F. Ciancetta, and P. Siano, "A multilevel inverter for photovoltaic systems with fuzzy logic control," IEEE Trans. Industrial Electron., vol. 57, pp. 4115-4125, 2010.
[34] W. A. Halim and N. A. Rahim, "FPGA-based pulse-width modulation control for single-phase multilevel inverter," in Proc. IEEE Conf. on Clean Energy and Technology, 2011, pp. 57-62.
[35] T. Atalik, M. Deniz, E. Koc, C. O. Gercek, B. Gultekin, M. Ermis, and I. Cadirci, "Multi-DSP and -FPGA-based fully digital control system for cascaded multilevel converters used in FACTS applications," IEEE Trans. Industrial Informat., vol. 8, pp. 511-527, 2012.
[36] R. N. A. L. e. Silva, L. H. S. C. Barreto, A. U. Barbosa, D. R. Joca, and P. P. Praca, "Digital implementation of a modulation technique for a multilevel inverter on FPGA," in Proc. IEEE Int. Conf. on Industry Applicat., 2012, pp. 1-6.
[37] M. P. Aguirre, L. Calvino, and M. I. Valla, "Multilevel current-source inverter with FPGA control," IEEE Trans. Industrial Electron., vol. 60, pp. 3-10, 2013.
[38] T. J. Vyncke, S. Thielemans, and J. A. Melkebeek, "Finite-set model-based predictive control for flying-capacitor converters: cost function design and efficient FPGA implementation," IEEE Trans. Industrial Informat., vol. 9, pp. 1113-1121, 2013.
[39] P. Martin Sanchez, O. Machado, E. Bueno, F. J. Rodriguez, and F. J. Meca, "FPGA-based implementation of a predictive current controller for power converters," IEEE Trans. Industrial Informat., to be published.
[40] J. Abad, J. Linares-Flores, E. Guzman-Ramirez, and H. Sira Ramirez, "Generalized proportional integral tracking controller for a single phase multilevel cascade inverter: A FPGA implementation," IEEE Trans. Industrial Informat., to be published.
[41] S. Busquets-Monge, S. Alepuz, J. Rocabert, and J. Bordonau, “Pulsewidth modulations for the comprehensive capacitor voltage balance of n-level three-leg diode-clamped converters,” IEEE Trans. Power Electron., vol. 24, pp. 1364-1375, May 2009.
[42] S. Busquets-Monge, R. Maheshwari, and S. Munk-Nielsen, "Overmodulation of n-level three-leg dc-ac diode-clamped converters with comprehensive capacitor voltage balance," IEEE Trans. Industrial Electron., vol. 60, pp. 1872-1883, May 2013.
[43] J. Nicolas-Apruzzese, S. Busquets-Monge, and J. Bordonau, "Design issues of the multilevel active-clamped converter," in Proc. Ind. Electron. Soc. Conf., 2011, pp. 4256-4261.
[44] S. Busquets-Monge, S. Alepuz, J. Bordonau, and J. Peracaula, "Voltage balancing control of diode-clamped multilevel converters with passive front-ends," IEEE Trans. Power Electron., vol. 23, pp. 1751-1758, Jul. 2008.
[45] J. Nicolás-Apruzzese, S. Busquets-Monge, J. Bordonau, S. Alepuz, and A. Calle-Prado, "Analysis of the fault-tolerance capacity of the multilevel active-clamped converter," IEEE Trans. Industrial Electron., to be published.
Page 9 of 9
http://www.ewh.ieee.org/soc/ies
Industrial Electronics Society
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960