Forschungspraktikum Drahtlose Sensor- und Roboternetze Prof. Dr. Hannes Frey Dipl. Inform. Frank...
12
Forschungspraktikum Drahtlose Sensor- und Roboternetze Prof. Dr. Hannes Frey Dipl. Inform. Frank Bohdanowicz
-
Upload
bernice-shaw -
Category
Documents
-
view
214 -
download
0
Transcript of Forschungspraktikum Drahtlose Sensor- und Roboternetze Prof. Dr. Hannes Frey Dipl. Inform. Frank...

ForschungspraktikumDrahtlose Sensor- und Roboternetze
Prof. Dr. Hannes Frey
Dipl. Inform. Frank Bohdanowicz

2
Motivation
Sensor Nodes Sensor Network
Example Applications Problem Statement
Sensor installation on demand• Avoids proactive
Maintenance• Robust and self-healing• More application possibilities
Manual installation cumbersome

3
Sensor Installation with Aerial Robots
4
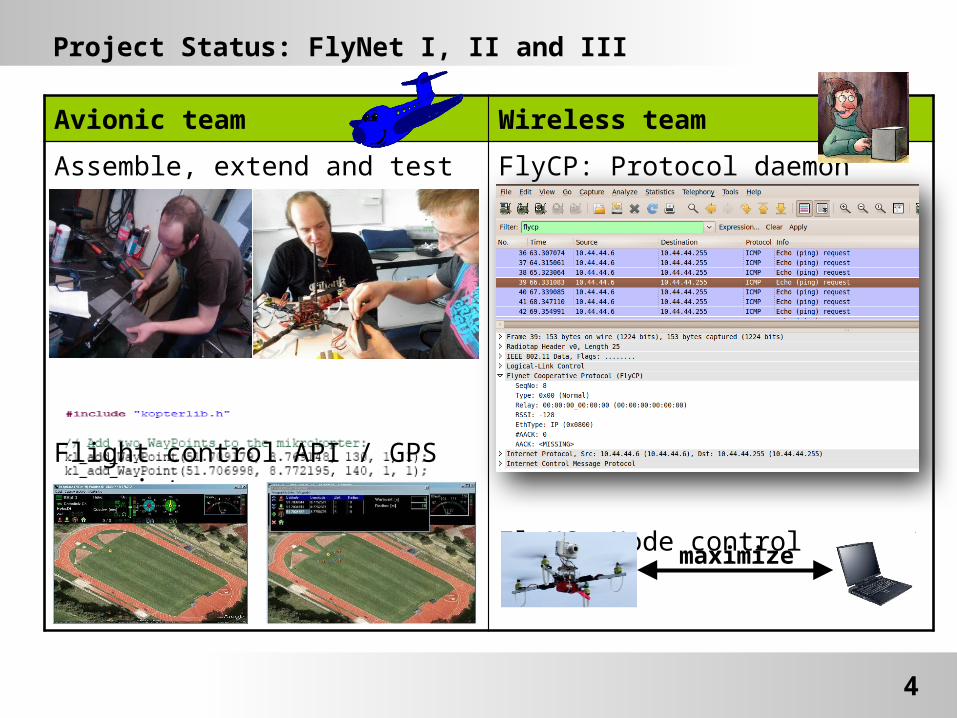
Project Status: FlyNet I, II and III
Avionic team Wireless team
Assemble, extend and test drones
Flight control API / GPS waypoints
FlyCP: Protocol daemon
FlyNC: Node control
maximize

Project Status: FlyNet I, II and III
5
USB WLAN
GPS Module
Embedded Linux Board (Beagle; so far)
NaviCtrl/FlightCtrl
Compass
http://www.mikrokopter.de

6
Project Status: FlyNet I, II and III
Result of a mass spring relaxation experiment
Aerial robot prototype
Test field

7
Project Status: FlySense
DMRC assembled deployment mechanism
DMRC assembled WSN node casing
Miniaturized embedded WSN nodesbased on ATMEL ATMEGA128RF

8
Project Status: FlySense
Well established deployment mechanisms based on regular tessellations
Deployments based on channel measurements
A
B
C
A and B already deployed. Position of C to be determined based on channel quality between A and B.
Subject of investigation: Increased coverage with the same network quality or same coverage with increased network quality.
Subsequently built network based on channel measurements

9
The Task for this Semester: Find the sensor
?

10
The Plan for this week
Start to research existing literature about already proposed solutions in this area (you can start with the reference list of the TPDS paper)• You can ignore solutions which do not match our assumptions (i.e. the
copter is equipped with GPS, the sensor node has only a wireless communication interface, the sensor node has no prior knowledge about its location)
• Prepare a short summary of all found solutions which we discuss in the next meeting
• Coordinate yourself who handles which paper Get acquainted with the documents about the previous projects
• Go through the documents Positionierung1.pdf and Positionierung2.pdf to see the problem encountered with finding the strongest RSSI-Value
• Briefly skim the project group reports FlyNet II.pdf and FlyNet III.pdf to get a first impression about the hardware
11
The Plan for Next Week
Plan the first milestones Form groups (if at all) Every group has a responsible project leader (changes over the
semester)• Coordinates with other group leader• Communicates with us• Presents the milestone
(Hardware will then be available as well)

12
The Plan for this Semester
Regular meetings (e.g. every 14 days) Every group has a current milestone with a deadline Every group has to report about the success
(this will be the base for the grades; hand in your slides)
At the end (in August):• Demonstrate the Prototype (video, measurement data)• Hand in a project report (this will be graded as well)