Fluid Statics 23 Module 2 Fluid Statics - Ancalle
26
Fluid Statics 23 Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020) Module 2 Fluid Statics 2.1 Approaching Pressure 2.1.1 Pressure at a Point Pressure at a point can be defined as an infinitesimal normal compressive force divided by an infinitesimal area over which it acts. Pressure at a point does not vary with direction. Consider a wedge-shaped element with a uniform width , sides Δ and Δ, and hypotenuse Δ. A force, results from a pressure on the hypotenuse, and forces and act on the other sides. If we draw a free body diagram and take forces in the x and z directions, we get: Then, taking a sum of forces in the x-axis: ∑ = ⟹ − sin = ΔΔ − ΔΔ sin = 1 2 ΔΔΔ ΔΔ − ΔΔ = 1 2 ΔΔΔ − = 1 2 Δ As the element shrinks to a point, Δ → 0 and the limit becomes: − =0⟹ = Repeating this process for the z-axis: ∑ = ⟹ − cos − = = ΔΔ = ΔΔ = ΔΔ = = ΔΔΔ 2 Δ = Δ cos Δ = Δ sin
Transcript of Fluid Statics 23 Module 2 Fluid Statics - Ancalle

Fluid Statics 23
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
Module 2
Fluid Statics
2.1 Approaching Pressure
2.1.1 Pressure at a Point
Pressure at a point can be defined as an infinitesimal normal compressive force divided by an infinitesimal area over
which it acts.
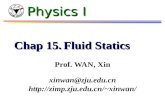
Pressure at a point does not vary with direction. Consider a wedge-shaped element with a uniform width 𝛥𝑦, sides
Δ𝑥 and Δ𝑧, and hypotenuse Δ𝑠. A force, 𝐹𝑠 results from a pressure 𝑃𝑠 on the hypotenuse, and forces 𝐹𝑥 and 𝐹𝑧 act on
the other sides. If we draw a free body diagram and take forces in the x and z directions, we get:
Then, taking a sum of forces in the x-axis:
∑ 𝐹𝑥 = 𝑚𝑎𝑥 ⟹ 𝐹𝑥 − 𝐹𝑠 sin 𝜃 = 𝑚𝑎𝑥
𝑃𝑥Δ𝑦Δ𝑧 − 𝑃𝑠Δ𝑠Δ𝑦 sin 𝜃 =1
2𝜌Δ𝑥Δ𝑦Δ𝑧𝑎𝑥
𝑃𝑥Δ𝑦Δ𝑧 − 𝑃𝑠Δ𝑦Δ𝑧 =1
2𝜌Δ𝑥Δ𝑦Δ𝑧𝑎𝑥
𝑃𝑥 − 𝑃𝑠 =1
2𝜌𝑎𝑥 Δ𝑥
As the element shrinks to a point, Δ𝑥 → 0 and the limit becomes:
𝑃𝑥 − 𝑃𝑠 = 0 ⟹ 𝑃𝑥 = 𝑃𝑠
Repeating this process for the z-axis:
∑ 𝐹𝑧 = 𝑚𝑎𝑧 ⟹ 𝐹𝑧 − 𝐹𝑠 cos 𝜃 − 𝐹𝑊 = 𝑚𝑎𝑧
𝐹𝑠 = 𝑃𝑠Δ𝑠Δ𝑦
𝐹𝑥 = 𝑃𝑥Δ𝑦Δ𝑧
𝐹𝑧 = 𝑃𝑧Δ𝑥Δ𝑦
𝑥
𝑧
𝐹𝑊 = 𝛾𝑉 = 𝜌𝑔Δ𝑥Δ𝑦Δ𝑧
2
𝜃
Δ𝑥 = Δ𝑠 cos 𝜃
Δ𝑧
=Δ
𝑠si
n𝜃

Fluid Statics 24
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
𝑃𝑧Δ𝑥Δ𝑦 − 𝑃𝑠Δ𝑠Δ𝑦 cos 𝜃 − 𝜌𝑔Δ𝑥Δ𝑦Δ𝑧
2=
1
2𝜌Δ𝑥Δ𝑦Δ𝑧𝑎𝑧
𝑃𝑧Δ𝑥Δ𝑦 − 𝑃𝑠ΔxΔ𝑦 − 𝜌𝑔Δ𝑥Δ𝑦Δ𝑧
2=
1
2𝜌Δ𝑥Δ𝑦Δ𝑧𝑎𝑧
𝑃𝑧 − 𝑃𝑠 − 𝜌𝑔Δ𝑧
2=
1
2𝜌Δ𝑧𝑎𝑧
𝑃𝑧 − 𝑃𝑠 =1
2𝜌(𝑎𝑧 + 𝑔)Δ𝑧
As the element shrinks to a point, Δ𝑧 → 0 and the limit becomes:
𝑃𝑧 − 𝑃𝑠 = 0 ⟹ 𝑃𝑧 = 𝑃𝑠
So, we see that, at a point, the pressure in all directions does not vary. This analysis holds true for other shapes.
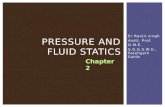
2.1.2 Pressure Variation
Consider an infinitesimally small element with dimensions 𝑑𝑥, 𝑑𝑦, 𝑑𝑧, that undergoes a pressure 𝑃(𝑥, 𝑦, 𝑧), where
𝑃0 is the pressure at the center of the element. We can determine the pressure at the sides of the element using the
chain rule:
𝑑𝑃 =𝜕𝑃
𝜕𝑥𝑑𝑥 +
𝜕𝑃
𝜕𝑦𝑑𝑦 +
𝜕𝑃
𝜕𝑧𝑑𝑧
So, if we move from the center of the element to an arbitrary side 𝑠 (where 𝑠 can be any side, 𝑥, 𝑦, or 𝑧), then the
pressure at that side is:
𝑃 = 𝑃0 +𝜕𝑃
𝜕𝑠
𝑑𝑠
2
Note that the distance moved is 𝑑𝑠
2 because we are moving from the center of the element to the side, so we only
move half of the entire length of the element in that direction. We can use this equation to find the pressure on all of
the sides of the element, and we can use those pressures to determine the forces acting on the element:
On the top face: 𝑃 = 𝑃0 +
𝜕𝑃
𝜕𝑧
𝑑𝑧
2 𝐹 = − (𝑃0 +
𝜕𝑃
𝜕𝑧
𝑑𝑧
2) 𝑑𝑥 𝑑𝑦
On the bottom face: 𝑃 = 𝑃0 −
𝜕𝑃
𝜕𝑧
𝑑𝑧
2 𝐹 = (𝑃0 −
𝜕𝑃
𝜕𝑧
𝑑𝑧
2) 𝑑𝑥 𝑑𝑦
On the front face: 𝑃 = 𝑃0 +
𝜕𝑃
𝜕𝑥
𝑑𝑥
2 𝐹 = − (𝑃0 +
𝜕𝑃
𝜕𝑥
𝑑𝑥
2) 𝑑𝑦 𝑑𝑧
𝑑𝑦 𝑑𝑥
𝑑𝑧

Fluid Statics 25
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
On the back face: 𝑃 = 𝑃0 −
𝜕𝑃
𝜕𝑥
𝑑𝑥
2 𝐹 = (𝑃0 −
𝜕𝑃
𝜕𝑥
𝑑𝑥
2) 𝑑𝑦 𝑑𝑧
On the left face: 𝑃 = 𝑃0 −
𝜕𝑃
𝜕𝑦
𝑑𝑦
2 𝐹 = (𝑃0 −
𝜕𝑃
𝜕𝑦
𝑑𝑦
2) 𝑑𝑥 𝑑𝑧
On the right face: 𝑃 = 𝑃0 +
𝜕𝑃
𝜕𝑦
𝑑𝑦
2 𝐹 = − (𝑃0 +
𝜕𝑃
𝜕𝑦
𝑑𝑦
2) 𝑑𝑥 𝑑𝑧
Newton’s second law can now be applied in each direction, taking 𝑚 = 𝜌𝑉 = 𝜌 𝑑𝑥 𝑑𝑦 𝑑𝑧 and 𝐹𝑊 = 𝜌𝑔𝑉:
∑ 𝐹𝑥 = (𝑃0 −𝜕𝑃
𝜕𝑥
𝑑𝑥
2) 𝑑𝑦 𝑑𝑧 − (𝑃0 +
𝜕𝑃
𝜕𝑥
𝑑𝑥
2) 𝑑𝑦 𝑑𝑧 = 𝜌 𝑑𝑥 𝑑𝑦 𝑑𝑧 𝑎𝑥
−𝜕𝑃
𝜕𝑥𝑑𝑥 𝑑𝑦 𝑑𝑧 = 𝜌 𝑑𝑥 𝑑𝑦 𝑑𝑧 𝑎𝑥
𝜕𝑃
𝜕𝑥= −𝜌𝑎𝑥
∑ 𝐹𝑦 = (𝑃0 −𝜕𝑃
𝜕𝑦
𝑑𝑦
2) 𝑑𝑥 𝑑𝑧 − (𝑃0 +
𝜕𝑃
𝜕𝑦
𝑑𝑦
2) 𝑑𝑥 𝑑𝑧 = 𝜌 𝑑𝑥 𝑑𝑦 𝑑𝑧 𝑎𝑦
𝜕𝑃
𝜕𝑦= −𝜌𝑎𝑦
∑ 𝐹𝑧 = (𝑃0 −𝜕𝑃
𝜕𝑧
𝑑𝑧
2) 𝑑𝑥 𝑑𝑦 − (𝑃0 +
𝜕𝑃
𝜕𝑧
𝑑𝑧
2) 𝑑𝑥 𝑑𝑦 − 𝜌𝑔 𝑑𝑥 𝑑𝑦 𝑑𝑧 = 𝜌 𝑑𝑥 𝑑𝑦 𝑑𝑧 𝑎𝑧
−𝜕𝑃
𝜕𝑧𝑑𝑥 𝑑𝑦 𝑑𝑧 − 𝜌𝑔 𝑑𝑥 𝑑𝑦 𝑑𝑧 = 𝜌 𝑑𝑥 𝑑𝑦 𝑑𝑧 𝑎𝑧
𝜕𝑃
𝜕𝑧 = −𝜌𝑎𝑧 − 𝜌𝑔 = −𝜌(𝑎𝑧 + 𝑔)
We can now apply these expressions to find the pressure differential in any direction:
𝑑𝑃 =𝜕𝑃
𝜕𝑥𝑑𝑥 +
𝜕𝑃
𝜕𝑦𝑑𝑦 +
𝜕𝑃
𝜕𝑧𝑑𝑧 = −𝜌𝑎𝑥𝑑𝑥 − 𝜌𝑎𝑦𝑑𝑦 − 𝜌(𝑎𝑧 + 𝑔)𝑑𝑧
2.1.3 Pressure in Fluids at Rest
An object at rest does not undergo acceleration in any direction. Therefore, for a fluid at rest, the pressure
differential becomes:
𝑑𝑃 = −𝜌𝑎𝑥𝑑𝑥 − 𝜌𝑎𝑦𝑑𝑦 − 𝜌(𝑎𝑧 + 𝑔)𝑑𝑧 = −𝜌𝑔𝑑𝑧
which we can express as:
𝑑𝑃
𝑑𝑧= −𝜌𝑔 = −𝛾
This tells us the following: there is no pressure variation in the x and y directions, pressure only varies in the vertical
direction; pressure decreases as we move up and increases as we move down; and pressure variation for a fluid at
rest depends on the specific weight of the fluid.

Fluid Statics 26
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
If the specific weight of the fluid is constant (e.g. an incompressible liquid with no variations in temperature or
composition), then we can integrate the pressure differential:
∫ 𝑑𝑃 = ∫ −𝛾𝑑𝑧 = −𝛾 ∫ 𝑑𝑧
Δ𝑃 = −𝛾Δ𝑧
2.2 Hydrostatic Pressure
2.2.1 Pascal’s Law
Fluid statics: the study of fluids at rest.
When a system is at rest: ∑ �⃑� = 0, ∑ �⃑⃑⃑� = 0
We define pressure as 𝑃 = 𝑑𝐹/𝑑𝐴. Following this definition, we can express the average pressure over an area as
𝑃𝑎𝑣𝑔 = 𝐹/𝐴.
In 1647-1648, Blaise Pascal established that a change in pressure in an enclosed fluid at rest is equal at all points in
the fluid. This is known as Pascal’s Law.
Consider an enclosed container full of a fluid:
If we apply a force 𝐹1 on the left area 𝐴1, then the pressure applied on the fluid is 𝑃1 = 𝐹1/𝐴1. Pascal’s Law states
that the change in pressure will be equal at all points in the fluid, which means that on the right area 𝐴2, the pressure
will be increased by 𝑃2 = 𝑃1. We can then determine the resulting force on the right area: 𝐹2 = 𝑃2𝐴2.
Mathematically:
𝑃1 =𝐹1
𝐴1
= 𝑃2 =𝐹2
𝐴2
∴ 𝐹2 = 𝐹1
𝐴2
𝐴1
Notice that if 𝐴2 is larger than 𝐴1, then the force applied on the right side will be increased. This makes hydraulic
lifts possible.
𝐹1 𝐹2𝐴1
𝐴2

Fluid Statics 27
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
Ex. In the figure above, 𝐹1 = 1 𝑘𝑁, 𝐴1 = 2 𝑚2, and 𝐴2 = 4 𝑚2. Determine 𝐹2.
Ans:
𝐹2 = 𝐹1
𝐴2
𝐴1
= (1) (4
2) = 2 𝑘𝑁
Note: If the area is twice as large, the force will be twice as large as well.
2.2.2 Pressure in Incompressible Fluids
We define hydrostatic pressure as the pressure exerted by a fluid at rest on a point submerged in that fluid. While the
term literally means “pressure of water at rest,” we will use this term to refer to pressure from any liquid. Consider a
container with an incompressible fluid. We will analyze a very small cube of fluid:
We can determine the pressure acting on the top face of the fluid as follows:
𝑃 =𝐹𝑊
𝐴=
𝛾𝑉
𝑑𝑥 𝑑𝑦=
𝛾 𝑑𝑥 𝑑𝑦 ℎ
𝑑𝑥 𝑑𝑦= 𝛾ℎ
where:
• 𝐹𝑊 is the weight of the column of water above the cube
• 𝐴 is the area of the top face of the cube
• 𝛾 is the specific weight of the column of water above the cube
• 𝑉 is the volume of the column of water above the cube
Notice that the pressure exerted by the fluid on the top of the cube only depends on the depth of the cube, and not its
geometry. We also did not include atmospheric pressure (which can be conceptually defined as the pressure exerted
on the water by the column of air above it).
This equation agrees with the equation for pressure in fluids at rest that we derived in the previous section Δ𝑃 =
−𝛾Δ𝑧, where Δ𝑧 = −ℎ (since ℎ is measured from top to bottom).
ℎ
𝑑𝑦 𝑑𝑥
𝑑𝑧

Fluid Statics 28
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
2.2.3 Pressure Head
For incompressible fluids, the pressure can be expressed in dimensions of length by solving for ℎ:
𝑃 = 𝛾ℎ ⟹ ℎ =𝑃
𝛾
This quantity is called the pressure head, and is used as a unit in pressure measurements. Conceptually, this head
represents the height of a column of liquid with specific gravity 𝛾 that produces a gage pressure 𝑃. Pressure is
commonly measured as the length of a column of water (𝑆 = 1) or a column of mercury (𝑆 = 13.6). The unit
conversions are as follows:
1 𝑚𝑚𝐻2𝑂 = 9.81 𝑃𝑎
1 𝑚𝑚𝐻𝑔 = 133 𝑃𝑎
From the conversions, it can be deduced that mercury is used to measure higher pressures than water. Pressure head
can also be measured in English units.
2.2.4 Pressure in Compressible Fluids
On compressible fluids, density and specific weight vary with pressure. Therefore, for a compressible fluid (such as
an ideal gas), we will have to express density as a function of pressure. Applying the ideal gas law to the pressure
differential yields:
𝑑𝑃
𝑑𝑧= −𝜌𝑔 = −
𝑃
𝑅𝑇𝑔
If we take the temperature of the fluid to be constant, we can integrate the above expression to get:
∫1
𝑃𝑑𝑃
𝑃
𝑃0
= ∫ −𝑔
𝑅𝑇𝑑𝑧
𝑧
𝑧0
ln𝑃
𝑃0
= −𝑔
𝑅𝑇(𝑧 − 𝑧0)
𝑃 = 𝑃0 𝑒−𝑔
𝑅𝑇(𝑧−𝑧0)
where 𝑃0 is a reference pressure at an elevation 𝑧0.
2.2.5 Pressure in the Atmosphere
We have learned that the temperature in the troposphere decreases linearly by 𝑇 = 𝑇0 − 𝛼𝑧. We can now determine
the pressure variation in the troposphere. Applying the ideal gas law to the pressure differential yields
𝑑𝑃
𝑑𝑧= −𝜌𝑔 = −
𝑃
𝑅𝑇𝑔

Fluid Statics 29
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
Rearranging, expressing 𝑇 as a function of 𝑧, integrating between an elevation of 0 and z, and solving for pressure:
∫1
𝑃𝑑𝑃
𝑃
𝑃𝑎𝑡𝑚
= ∫ −𝑔
𝑅(𝑇0 − 𝛼𝑧)𝑑𝑧
𝑧
0
ln𝑃
𝑃𝑎𝑡𝑚
=𝑔
𝛼𝑅ln
𝑇0 − 𝛼𝑧
𝑇0
𝑃 = 𝑃𝑎𝑡𝑚 (𝑇0 − 𝛼𝑧
𝑇0
)
𝑔𝛼𝑅
Solving for values between 0 < 𝑧 ≤ 1000 shows that the pressure decrease is very small, and changes in static air
pressure can be neglected unless the elevation difference is relatively large.
The temperature in the stratosphere, 𝑇𝑠, is constant. So, we determine the pressure by integrating from 𝑧𝑠, the lowest
elevation in the stratosphere to an elevation 𝑧.
𝑃 = 𝑃𝑠 𝑒−
𝑔𝑅𝑇𝑠
(𝑧−𝑧𝑠)
2.3 Measuring Pressure
2.3.1 U-tube Manometers
Consider pressurized flow in a pipe. If we punch open a hole in the top wall of the pipe and insert a tube, water will
flow upward until the pressure of the water is equal to atmospheric pressure. The fluid in the tube will be static, and
so we can use hydrostatic equations to find the pressure at different points in the tube and in the pipe.
Manometers are instruments that use this principle to measure pressures. In the figure below, a cross-sectional view
of the pipe is shown, and a manometer is connected to the side of the pipe. The manometer connects the pipe to a
point with a known pressure (i.e. ○2 , where the pressure is atmospheric). By measuring the pressure difference
between points ○1 and ○2 , we can determine the pressure at the pipe. If we want to measure gage pressures, then
𝑃2 = 𝑃𝑎𝑡𝑚 = 0.
𝑃 = 𝑃𝑎𝑡𝑚
ℎ
𝑃 = 𝛾ℎ

Fluid Statics 30
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
𝑃2 + Δ𝑃 = 𝑃1
0 + 𝛾ℎ = 𝑃1
𝑃1 = 𝛾ℎ
Remember that pressure increases with depth. Therefore, since we move “downward” from 𝑃2 to 𝑃1, the pressure
difference is positive. If we would have started measuring from the pipe to the tube, our equation would have been:
𝑃1 − 𝛾ℎ = 𝑃2 = 0
𝑃1 = 𝛾ℎ
Ex. In the U-tube manometer above, ℎ = 2𝑓𝑡 and the fluid is water. What is the pressure in the pipe?
Ans:
𝛾 = 62.4 𝑙𝑏/𝑓𝑡3
𝑃 = 𝛾ℎ = (62.4)(2) = 124.8 𝑙𝑏/𝑓𝑡2
These types of manometers are called U-tube manometers. Manometers that use a single fluid are usually only used
to measure very small pressures. To measure larger pressures, a heavier fluid can be inserted in the manometer.
Measuring the pressure differences from ○1 to ○3 yields:
𝑃1 + 𝛾1ℎ − 𝛾2𝐻 = 𝑃3 = 0
𝑃1 = 𝛾2𝐻 − 𝛾1ℎ
Notice that the pressure at ○2 and ○2’ is the same, since there is no difference in elevation.

Fluid Statics 31
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
2.3.2 Differential Manometers
A differential manometer is used to measure pressure differences between two pipes or between two points in a
conduit. The pressure difference is computed in the same way as the U-tube manometer, but the end of the
manometer will not be open to the atmosphere.
2.3.3 Piezometer
A piezometer is a simple type of manometer that consists of a vertical tube that is inserted in a vessel with a fluid.
Piezometers are useful for measuring small pressures. The static pressure of a point in the liquid at a depth 𝑑 is:
𝑃 = 𝛾(ℎ + 𝑑)
2.3.4 Micromanometers
Another type of manometer is the micromanometer, which is used to measure very small pressure changes.
Applying the manometer equations, we get:
𝑃1 + 𝛾1(𝑧1 − 𝑧2) + 𝛾2(𝑧2 − 𝑧3) − 𝛾3(𝑧4 − 𝑧3) − 𝛾2(𝑧5 − 𝑧4) = 𝑃5
𝑃1 + 𝛾1(𝑧1 − 𝑧2) + 𝛾2(𝑧2 − 𝑧3 + 𝑧4 − 𝑧5) − 𝛾3(𝑧4 − 𝑧3) = 𝑃5
Note that 𝑃5 = 𝑃𝑎𝑡𝑚 = 0, 𝐻 = 𝑧4 − 𝑧3, and ℎ = 𝑧5 − 𝑧2.
𝑃1 + 𝛾1(𝑧1 − 𝑧2) + 𝛾2(𝐻 − ℎ) − 𝛾3𝐻 = 0
𝑃1 = 𝛾1(𝑧2 − 𝑧1) + 𝛾2ℎ + (𝛾3 − 𝛾2)𝐻

Fluid Statics 32
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
A small change in pressure Δ𝑃 will result in a change in the elevation 𝑧2 of Δ𝑧, as well as a change in ℎ of 2Δ𝑧, and
a change in 𝐻 of 2Δ𝑧𝐷2/𝑑2. Therefore, we can evaluate a pressure change by:
𝑃1 = 𝛾1(−Δ𝑧) + 𝛾2Δℎ + (𝛾3 − 𝛾2)Δ𝐻
Δ𝑃1 = 𝛾1(−Δ𝑧) + 𝛾2(2Δ𝑧) +(𝛾3 − 𝛾2)2Δ𝑧𝐷2
𝑑2
And so, the rate of change of 𝐻 with respect to 𝑃 is:
Δ𝐻
Δ𝑃1
=2Δ𝑧𝐷2/𝑑2
𝛾1(−Δ𝑧) + 𝛾2(2Δ𝑧) +(𝛾3 − 𝛾2)2Δ𝑧𝐷2
𝑑2
=2𝐷2/𝑑2
−𝛾1 + 2𝛾2 + 2(𝛾3 − 𝛾2)𝐷2
𝑑2
2.3.5 Barometers
A barometer is an instrument used to measure atmospheric pressure. It was invented by Evangelista Torricelli.
A barometer consists of a glass tube filled with mercury. The tube is inserted in a reservoir filled with mercury and
turned upside down. The weight of the mercury in the tube causes it to move downward and creates a vacuum in the
top of the tube where 𝑃 ≈ 0. The atmospheric pressure can be measured by measuring the height of the mercury
column inside the tube, so that:
𝑃𝑎𝑡𝑚 = 𝛾𝐻𝑔ℎ
Note: Under standard engineering conditions, the atmospheric pressure is 760 𝑚𝑚𝐻𝑔.
2.3.6 Pressure Gages
In cases where static pressures are too high to measure with manometers, a pressure gage can be used. Different
types of pressure gages are:
Bourdon gage: uses an elastic, coiled metal (Bourdon tube) to determine pressures.

Fluid Statics 33
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
Pressure Transducer: uses an electrical strain gage to determine deformation in its diaphragm and converts the
electrical current measure into a pressure measure.
Fused Quartz Force-Balance Bourdon tube: uses the same concept as the Bourdon gage, but determines pressures
using a magnetic field that returns the Bourdon tube to its original position.
Piezoelectric gages: devices that change their electric potential when subjected to small pressure changes.
2.4 Buoyancy
2.4.1 Determining Buoyant Force
Consider an object with specific weight 𝛾𝑜, submerged in a fluid with specific weight 𝛾𝑓:
The force from the surrounding liquid acting on top of the object can be computed by multiplying the pressure on
the top face times the area of the top face:
ℎ
𝑑𝑦 𝑑𝑥
𝑑𝑧

Fluid Statics 34
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
𝐹𝑡𝑜𝑝 = 𝑃𝑡𝑜𝑝𝐴𝑡𝑜𝑝 = 𝛾𝑓ℎ 𝑑𝑥 𝑑𝑦
The force acting on the bottom face is:
𝐹𝑏𝑜𝑡 = 𝑃𝑏𝑜𝑡𝐴𝑏𝑜𝑡 = 𝛾𝑓(ℎ + 𝑑𝑧)𝑑𝑥 𝑑𝑦
We don’t consider the forces on the sides since they will cancel out. The net force acting on the object is:
𝐹𝑛𝑒𝑡 = 𝐹𝑏𝑜𝑡 − 𝐹𝑡𝑜𝑝 = 𝛾𝑓(ℎ + 𝑑𝑧)𝑑𝑥 𝑑𝑦 − 𝛾𝑓ℎ 𝑑𝑥 𝑑𝑦 = 𝛾𝑓(ℎ + 𝑑𝑧 − ℎ)𝑑𝑥 𝑑𝑦 = 𝛾𝑓 𝑑𝑥 𝑑𝑦 𝑑𝑧
Notice that the net force is then the specific weight of the fluid by the volume of the submerged object (i.e. the
displaced volume). We call this force the buoyant force, 𝐹𝐵 and define it as:
𝐹𝐵 = 𝛾𝑓𝑉
Where 𝑉 is the displaced volume. In order for an object to float, the buoyant force has to be larger than its weight,
applying static equilibrium, we see that a submerged or partially submerged object is static when its buoyant force is
equal to its weight:
∑ 𝐹 = 𝐹𝐵 − 𝐹𝑊 = 0 ⟹ 𝐹𝐵 = 𝐹𝑊
2.4.2 Hydrometers
A hydrometer is an instrument used to measure the specific gravity of liquids that uses the principle of buoyancy. It
consists of a stem with a constant area 𝐴. When placed in water, the hydrometer will submerge until:
𝐹𝑊 = 𝛾𝐻2𝑂𝑉0
where 𝑉0 is the initial submerged volume. When submerged in a different fluid with specific weight 𝛾, the force
balance is:
𝐹𝑊 = 𝛾(𝑉0 − 𝐴Δℎ)
where Δℎ is the change in submerged portion of the stem. Combining both equations gives:
𝛾𝐻2𝑂𝑉0 = 𝛾(𝑉0 − 𝐴Δℎ) ⟹ S =V0
𝑉0 − 𝐴Δℎ=
1
1 −𝐴Δℎ𝑉0
2.5 Stability
Consider a submerged object:
• Center of gravity: the centroid of an object, 𝐺
• Center of buoyancy: the centroid of the displaced volume, 𝐶𝐵
Gravitational force acts on the center of gravity, and buoyant force acts on the center of buoyancy. We have already
shown that a floating object is in vertical equilibrium if 𝐹𝐵 = 𝐹𝑊. However, we must also consider if an object has
rotational equilibrium, which results when no moment is formed by the two forces. We will consider three types of
rotational equilibrium:

Fluid Statics 35
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
Stable Equilibrium
Occurs when 𝐺 is below 𝐶𝐵. If the object is slightly rotated, a coupled moment
between 𝐹𝑊 and 𝐹𝐵 will restore the object to its original position.
Unstable Equilibrium
Occurs when 𝐺 is above 𝐶𝐵. If the object is slightly rotated, a coupled moment
between 𝐹𝑊 and 𝐹𝐵 will continue to rotate the object.
Neutral Equilibrium
Occurs when 𝐺 and 𝐶𝐵 coincide. No coupled moment forms from a rotation.
For objects that are partially submerged, a rotation may move the center of buoyancy. This allows for stable
equilibrium even in instances where 𝐺 is above 𝐶𝐵.

Fluid Statics 36
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
Consider a partially submerged object (like a ship) in unstable equilibrium. We
will define the point about which the object rotates as the origin, 𝑂, which lies at
the water surface on the vertical line that crosses 𝐶𝐵 to 𝐺. We will call this line
the line of action.
When a rotation is applied to the object, the line of action rotates along with the
object, and the 𝐶𝐵 can shift. If we trace a vertical line from the new position of
the center of buoyancy, it will intersect the line of action at the metacenter, 𝑀.
If 𝑀 is above 𝐺 in the line of action, then the object is in stable equilibrium, since
a counteracting moment acting between 𝑀 and 𝐺 will return the object to its
original position.
If, however, 𝑀 is below 𝐺 in the line of action, then the object is in unstable
equilibrium, as the resulting moment will continue the rotation and cause the
object to overturn.
While the theory for stability is relatively simple to grasp at a conceptual level, determining the stability of objects
becomes complicated when it is time to determine the location of 𝑀. In this class, we will consider the method
taught by Potter et. al.
Let’s define the metacentric height, 𝐺𝑀̅̅̅̅̅ as the distance from 𝐺 to 𝑀. A positive 𝐺𝑀̅̅̅̅̅ value indicates that the
metacenter is above the center of gravity. A negative 𝐺𝑀̅̅̅̅̅ value indicates that 𝑀 is below 𝐺. Consider a floating
body with a uniform cross section, having rotated as shown below:

Fluid Statics 37
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
The x-coordinate of the center of buoyancy, �̅� can be found by considering the volume of the original submerged
volume (𝑉0), plus the volume from added wedge 𝐷𝑂𝐸, 𝑉1 minus the volume from the subtracted wedge 𝐴𝑂𝐵, 𝑉2:
�̅� =�̅�0𝑉0 + �̅�1𝑉1 − �̅�2𝑉2
𝑉
�̅�𝑉 = �̅�0𝑉0 + �̅�1𝑉1 − �̅�2𝑉2
Taking the x-coordinate of the original center of buoyancy to be zero, we get �̅�0 = 0:
�̅�𝑉 = �̅�1𝑉1 − �̅�2𝑉2
�̅�𝑉 = ∫ 𝑥 𝑑𝑉𝑉1
− ∫ 𝑥 𝑑𝑉𝑉2
Now, to find an expression for the infinitesimal volume 𝑑𝑉, let’s take a step back and take a look into the basics of
integrating. Suppose you want to find the area of the triangle formed by the lines 𝑦 = 𝑠𝑥, 𝑦 = 0, and 𝑥 = 𝑥1. You
could easily do this by integrating 𝑦 = 𝑠𝑥 from 0 to 𝑥1. Your integral would look like:
∫ 𝑠𝑥 𝑑𝑥𝑥1
0
We know that in a linear equation, the constant represents the slope of the line. If we define 𝛼 as the angle of the line
measured from the x-axis, then the slope is 𝑠 =𝛥𝑦
Δ𝑥= tan 𝛼. Giving us an integral of ∫ 𝑥 tan 𝛼 𝑑𝑥
𝑥1
0. Now, this

Fluid Statics 38
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
integral only gives us the area of the triangle. If instead, we wanted to find the volume of the triangle, assuming a
constant width 𝑙, then we could express the volume as 𝑉 = ∫ 𝑑𝑉𝑉1
= ∫ 𝑥 tan 𝛼 𝑑𝐴𝐴1
where 𝑑𝐴 = 𝑙 𝑑𝑥. This means
that an expression for a differential volume is 𝑑𝑉 = 𝑥 tan 𝛼 𝑑𝐴.
Now, back to our x-coordinate equation, we can insert our definition of 𝑑𝑉 into it to yield:
�̅�𝑉 = ∫ 𝑥2 tan 𝛼 𝑑𝛢𝛢1
− ∫ −𝑥2 tan 𝛼 𝑑𝐴𝐴2
Notice that the second term is negative because the area is located on the negative side of the y-axis (setting our
origin at 𝑂.) Simplifying:
�̅�𝑉 = tan 𝛼 (∫ 𝑥2 𝑑𝛢𝛢1
+ ∫ 𝑥2 𝑑𝐴𝐴2
) = tan 𝛼 ∫ 𝑥2 𝑑𝛢𝛢1+𝐴2
= tan 𝛼 ∫ 𝑥2 𝑑𝛢𝐴
Notice that 𝐴1 + 𝐴2 is equivalent to the total waterline area A. From statics we define the second moment of area
(moment of inertia) about an axis perpendicular to x as 𝐼 = ∫ 𝑥2 𝑑𝐴. This means we can substitute our equation
with:
�̅�𝑉 = 𝐼𝑂 tan 𝛼
where 𝐼𝑂 represents an axis passing through the origin. Now, looking at our diagram, we can express �̅� as a function
of the distance from the original center of buoyancy to the metacenter, 𝐶𝑀̅̅̅̅̅ by: �̅� = 𝐶𝑀̅̅̅̅̅ tan 𝛼, and substitute:
𝐶𝑀̅̅̅̅̅ 𝑉 tan 𝛼 = 𝐼𝑂 tan 𝛼
𝐶𝑀̅̅̅̅̅ =𝐼𝑂
𝑉
And from the diagram, we can see that 𝐶𝑀̅̅̅̅̅ = 𝐶𝐺̅̅ ̅̅ + 𝐺𝑀̅̅̅̅̅ so, finally, we get:
𝐺𝑀̅̅̅̅̅ =𝐼𝑂
𝑉− 𝐶𝐺̅̅ ̅̅
Now, for a given body orientation, if 𝐺𝑀̅̅̅̅̅ is positive, the body is stable. If not, the body is unstable. Note that this
equation assumes that the object is rotating about the origin. For other cases, the location of the center of buoyancy
must be determined to determine stability.
2.6 Forces on Plane Areas
2.6.1 General Formulation
Consider a submerged flat plate with an arbitrary shaped, oriented at an angle 𝜃 from the horizontal. We will set an
x/y coordinate system starting at the surface of the liquid so that the positive y-axis extends downward along the
plane of the plate.

Fluid Statics 39
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
If we consider a force 𝑑𝐹 acting over a differential area 𝑑𝐴 at a depth of ℎ = 𝑦 sin 𝜃, we can determine that:
𝑑𝐹 = 𝑃 𝑑𝐴 = 𝛾ℎ 𝑑𝐴 = 𝛾 𝑦 sin 𝜃 𝑑𝐴
Remembering that we determined that the pressure at a point submerged in a liquid is 𝑃 = 𝛾ℎ. The resultant force
acting on the plate is equivalent to the sum of all differential forces acting on the plate, which we can obtain by
integrating over the entire plate area 𝐴:
𝐹 = ∑ 𝑑𝐹 = ∫ 𝛾 𝑦 sin 𝜃 𝑑𝐴𝐴
= 𝛾 sin 𝜃 ∫ 𝑦 𝑑𝐴𝛢
= 𝛾 sin 𝜃 �̅�𝐴
Keeping in mind that �̅� =∫ 𝑦 𝑑𝐴𝛢
𝐴, where �̅� represents the distance to the centroid of the plate. Now, the depth to the
centroid can be expressed as ℎ̅ = �̅� sin 𝜃, which gives:
𝐹 = 𝛾ℎ̅𝐴
Since the average pressure acting over an area is 𝑃𝑎𝑣𝑔 = 𝐹/𝐴, then we can say that 𝑃𝑎𝑣𝑔 = 𝛾ℎ̅.
The center of pressure (𝑥𝑃 , 𝑦𝑃) is the point where the resultant force acts on. It can be determined by a balance of
moments as follows.
On the y-axis:
𝑀𝑅𝑥= ∑ 𝑀𝑥
𝑦𝑃𝐹 = ∫ 𝑦 𝑑𝐹𝐴
𝑦𝑃𝛾 sin 𝜃 �̅�𝐴 = ∫ 𝑦 (𝛾 𝑦 sin 𝜃 𝑑𝐴)𝐴
𝑦𝑃 �̅� 𝐴 = ∫ 𝑦2 𝑑𝐴𝐴
We know that the area moment of inertia 𝐼𝑥 = ∫ 𝑦2 𝑑𝐴𝐴
. So, we express the center of pressure as:
𝑦𝑃 =𝐼𝑥
�̅�𝐴
The parallel-axis theorem (from Statics) says that 𝐼𝑥 = 𝐼�̅� + 𝐴�̅�2. Replacing into the equation above yields:

Fluid Statics 40
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
𝑦𝑃 = �̅� +𝐼�̅�
�̅�𝐴
Where 𝐼�̅� is the moment of inertia about the centroidal axis of the plate, and 𝐴 is the submerged are of the plate.
On the x-axis:
𝑀𝑅𝑦= ∑ 𝑀𝑦
𝑥𝑃𝐹 = ∫ 𝑥 𝑑𝐹𝐴
𝑥𝑃𝛾 sin 𝜃 �̅�𝐴 = ∫ 𝑥 (𝛾 𝑦 sin 𝜃 𝑑𝐴)𝐴
𝑥𝑃 �̅� 𝐴 = ∫ 𝑥𝑦 𝑑𝐴𝐴
where the integral represents the product of inertia 𝐼𝑥𝑦
𝑥𝑃 =𝐼𝑥𝑦
�̅�𝐴
Applying the parallel-plane theorem: 𝐼𝑥𝑦 = 𝐼�̅�𝑦 + 𝐴�̅��̅�:
𝑥𝑃 = �̅� +𝐼�̅�𝑦
�̅�𝐴
2.6.2 Geometric Formulation
An alternative method to finding force and center of pressure is to treat the pressure distribution along a plate as a
geometric figure.
Pressure gradient: the distribution of pressure along a submerged area
Pressure prism: a geometric representation of the pressure gradient as a volume
Considering a force 𝑑𝐹 acting over 𝑑𝐴 at a depth ℎ, we once again determine that 𝑑𝐹 = 𝑃 𝑑𝐴 = 𝛾ℎ 𝑑𝐴. We can
also represent the force geometrically as a differential volume with base 𝑑𝐴 and height 𝑃, as shown in the figure.
The resultant force can then be found by integrating the differential force elements over the volume of the pressure
prism:

Fluid Statics 41
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
𝐹 = ∑ 𝑑𝐹 = ∫ 𝑃 𝑑𝐴𝐴
= ∫ 𝑑𝑉𝑉
= 𝑉
This means that the magnitude of the resultant force is equal to the volume of the pressure prism.
The location of the center of pressure is found by taking the moment of the resultant force about the y-axis and x-
axis. For the y-coordinate:
(𝑀𝑅)𝑥 = ∑ 𝑀𝑥
𝑦𝑃𝐹 = ∫ 𝑦 𝑑𝐹
𝑦𝑃 =∫ 𝑦 𝑑𝐹
𝐹=
∫ 𝑦 𝑃 𝑑𝐴𝐴
∫ 𝑃 𝑑𝐴𝐴
=∫ 𝑦 𝑑𝑉
𝑉
𝑉
For the x-coordinate:
(𝑀𝑅)𝑦 = ∑ 𝑀𝑦
𝑥𝑃𝐹 = ∫ 𝑥 𝑑𝐹
𝑥𝑃 =∫ 𝑥 𝑑𝐹
𝐹=
∫ 𝑥 𝑃 𝑑𝐴𝐴
∫ 𝑃 𝑑𝐴𝐴
=∫ 𝑥 𝑑𝑉
𝑉
𝑉
Notice, then, that the center of pressure is located at the centroid of the pressure gradient.
2.6.3 Integral Formulation
If we can express the plate’s x- and y-coordinates as a function 𝑥 = 𝑓(𝑦) then the resultant force is found by direct
integration. Since the x-coordinate is measured from the center of the area, then 𝑑𝐴 = 2𝑥 𝑑𝑦:
𝐹 = ∫ 𝑃 𝑑𝐴𝐴
= ∫ 𝑃 2𝑥 𝑑𝑦𝑦
= 2 ∫ 𝑃 𝑓(𝑦)𝑑𝑦𝑦
The location of the center of pressure is found by equating to the moment of the resultant force to the moment of the
pressure distribution about the x- and y- axes. We take 𝑑𝐹 to act along the centroid of 𝑑𝐴, at coordinates (�̃�, �̃�):
(𝑀𝑅)𝑥 = ∑ 𝑀𝑥
𝑦𝑃𝐹 = ∫ �̃� 𝑑𝐹𝐴
𝑦𝑃 =∫ �̃� 𝑑𝐹
𝐴
𝐹=
∫ �̃� 𝑃 𝑑𝐴𝐴
∫ 𝑃 𝑑𝐴𝐴
=∫ �̃� 𝑃 𝑓(𝑦)𝑑𝑦
𝑦
∫ 𝑃 𝑓(𝑦)𝑑𝑦𝑦
(𝑀𝑅)𝑦 = ∑ 𝑀𝑦

Fluid Statics 42
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
𝑥𝑃𝐹 = ∫ �̃� 𝑑𝐹𝐴
𝑥𝑃 =∫ �̃� 𝑑𝐹
𝐴
𝐹=
∫ �̃� 𝑃 𝑑𝐴𝐴
∫ 𝑃 𝑑𝐴𝐴
=∫ �̃� 𝑃 𝑓(𝑦)𝑑𝑦
𝑦
∫ 𝑃 𝑓(𝑦)𝑑𝑦𝑦
2.6.4 Projection Method for Inclined Areas
An alternative way of determining forces on inclined areas is by dividing the resultant force into horizontal and
vertical components.
The horizontal component of the force is equal to the force from hydrostatic pressure acting on a vertical projection
of the inclined area.
𝐹ℎ = ∫ 𝑃 sin 𝜃 𝑑𝐴𝐴
The vertical component of the force is equal to (a) the weight of the liquid of the liquid above the plate, or (b) the
buoyant force acting on the plate (if the liquid is below the plate).
𝐹𝑣 = ∫ 𝛾 𝑑𝑉𝑉
= 𝛾𝑉
𝐹𝑣 = 𝐹𝐵 = 𝛾𝑉
On gases, where weight can be neglected, we can assume the pressure to be constant. Therefore, the horizontal and
vertical components of the resultant force can be determined by projecting the curved surface area into vertical and
horizontal planes.
The resultant force is found by performing a vector sum of the horizontal and vertical components:
𝐹 = √𝐹ℎ2 + 𝐹𝑣
2

Fluid Statics 43
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
The center of pressure can be determined by a weighted sum:
𝑥𝑃 =𝐹ℎ𝑥𝑃ℎ
+ 𝐹𝑣𝑥𝑃𝑣
𝐹
𝑦𝑃 =𝐹ℎ𝑦𝑃 ℎ
+ 𝐹𝑣𝑦𝑃𝑣
𝐹
2.6.5 Projection Method for Curved Areas
While forces on curved areas can be determined using direct integration, it is easier to determine forces using the
projection method.
2.7 Pressure on Linearly Accelerating Containers
2.7.1 Horizontal Acceleration
If a container is moving horizontally with a constant acceleration, 𝒂𝒙, then the fluid will be at rest relative to the
container (which we will call a reference frame).
The acceleration will result in the liquid’s surface being inclined, where the rotation occurs about the center of the
container. However, since there is no relative movement between the liquid particles, the hydrostatic equation can be
used to determine pressure. At any point in the fluid, the pressure will be computed as:
𝑃 = 𝛾ℎ
If we analyze a differential cube (like we have done to determine hydrostatic pressure and buoyancy), we can
calculate the forces acting on the left and right sides of the cube and then find the sum of forces in the horizontal
axis. Let point 1 represent the leftmost side of the cube and point 2 represent the rightmost side of the cube:

Fluid Statics 44
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
∑ 𝐹𝑥 = 𝑚𝑎𝑥
𝐹1 − 𝐹2 = 𝑚𝑎𝑥
𝑃1𝑑𝐴 − 𝑃2𝑑𝐴 = 𝜌 𝑑𝑉𝑎𝑥
(𝑃1 − 𝑃2)𝑑𝐴 =𝛾
𝑔 𝑑𝑥 𝑑𝐴 𝑎𝑥
𝑃1 − 𝑃2 =𝛾
𝑔𝑑𝑥 𝑎𝑥
Taking the pressure on each side to be 𝑃 = 𝛾ℎ, we get that
𝛾ℎ1 − 𝛾ℎ2 =𝛾
𝑔𝑑𝑥 𝑎𝑥
ℎ1 − ℎ2 =𝑑𝑥
𝑔𝑎𝑥
ℎ1 − ℎ2
𝑑𝑥=
𝑎𝑥
𝑔
Notice that ℎ1 − ℎ2 = 𝑑𝑧, the difference in elevation of the water surface above the two sides of the cube. This
means that the expression (ℎ1 − ℎ2)/𝑑𝑥 can be taken as the slope of the liquid surface. If we take the angle of the
water surface to be 𝜃, we get:
ℎ1 − ℎ2
𝑑𝑥=
𝑑𝑧
𝑑𝑥= tan 𝛼
So we define the slope of the water surface as:
tan 𝜃 =𝑎𝑥
𝑔
If the fluid is enclosed, and unable to pivot about the center of the container, the acceleration results in a pressure
increase that can be resolved by picturing an imaginary liquid surface at an angle 𝜃, which pivots about point B in
the figure.

Fluid Statics 45
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
2.7.2 Vertical Acceleration
If the reference frame is accelerating vertically, the liquid surface remains horizontal. The pressure along the z-axis
can be found by analyzing the forces acting on the vertical element in the image.
∑ 𝐹𝑧 = 𝑚𝑎𝑧
𝑃𝑑𝐴 − 𝐹𝑊 =𝛾
𝑔 ℎ 𝑑𝐴 𝑎𝑧
𝑃𝑑𝐴 − 𝛾ℎ 𝑑𝐴 =𝛾
𝑔ℎ 𝑑𝐴 𝑎𝑧
𝑃 = 𝛾ℎ (1 +𝑎𝑧
𝑔)
2.7.3 2D Acceleration
If the reference frame is accelerating in both the x- and y- directions, we can determine the slope of the liquid
surface by simplifying the pressure differential to:
𝑑𝑃 = −𝜌𝑎𝑥𝑑𝑥 − 𝜌(𝑔 + 𝑎𝑧)𝑑𝑧
Integrating between two arbitrary points in the liquid gives:
𝑃2 − 𝑃1 = −𝜌𝑎𝑥(𝑥2 − 𝑥1) − 𝜌(𝑔 + 𝑎𝑧)(𝑧2 − 𝑧1)
If the two points are selected at the liquid surface, where 𝑃 = 0, we can further simplify to:
0 = −𝜌𝑎𝑥(𝑥2 − 𝑥1) − 𝜌(𝑔 + 𝑎𝑧)(𝑧2 − 𝑧1)
𝑧2 − 𝑧1
𝑥2 − 𝑥1
= −𝑎𝑥
𝑔 + 𝑎𝑧
𝑧1 − 𝑧2
𝑥2 − 𝑥1
=𝑎𝑥
𝑔 + 𝑎𝑧

Fluid Statics 46
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
where, 𝑧1−𝑧2
𝑥2−𝑥1 is the slope of the liquid surface, so that:
tan 𝜃 =𝑎𝑥
𝑔 + 𝑎𝑧
2.8 Pressure on Rotating Containers
If the reference frame is rotating with a constant angular velocity 𝜔, the liquid surface will take the shape of a forced
vortex. We know that the acceleration of a fluid particle at a distance 𝑟 from the center is 𝑎𝑟 = 𝜔2𝑟 acting toward
the center. Analyzing a differential ring element that surrounds the free surface point at the center, with radius 𝑟,
thickness 𝑑𝑟, and height 𝑑ℎ, we can define the pressure inside the ring as 𝑃. Then, the pressure outside the ring is
defined as:
𝑃2 = 𝑃 + (𝜕𝑃
𝜕𝑟) 𝑑𝑟
The sum of forces along a radial axis becomes:
∑ 𝐹𝑟 = 𝑚𝑎𝑟
𝑃2𝑑𝐴 − 𝑃𝑑𝐴 =𝛾
𝑔 𝑑𝑉 𝜔2𝑟
(𝑃 + (𝜕𝑃
𝜕𝑟) 𝑑𝑟) (2𝜋𝑟 𝑑ℎ) − 𝑃(2𝜋𝑟 𝑑ℎ) =
𝛾
𝑔 (2𝜋𝑟 𝑑ℎ 𝑑𝑟)𝜔2𝑟
(𝑃 + (𝜕𝑃
𝜕𝑟) 𝑑𝑟) − 𝑃 =
𝛾
𝑔 𝑑𝑟 𝜔2𝑟
𝜕𝑃
𝜕𝑟=
𝛾
𝑔𝜔2𝑟
Integrating both sides:
𝑃 = (𝛾𝜔2
2𝑔) 𝑟2 + 𝐶
At the center, where 𝑟 = 0, 𝑃 = 0, therefore 𝐶 = 0.

Fluid Statics 47
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)
𝑃 = 𝛾ℎ = (𝛾𝜔2
2𝑔) 𝑟2
ℎ = (𝜔2
2𝑔) 𝑟2
This equation describes a parabola. Therefore, the liquid in the container has the shape of a paraboloid. The height
of the paraboloid above the center surface at the edges is found by solving for the entire radius of the container 𝑅:
𝐻 = (𝜔2
2𝑔) 𝑅2
The liquid inside a rotating container will be displaced 𝐻/2 above the original surface at the edges, and 𝐻/2 below
the original surface at the center. The volume of the paraboloid section is 𝑉 = 𝜋𝑅2𝐻/2.
As with linearly accelerating containers, the pressure at a point is calculated by 𝑃 = 𝛾ℎ, and for closed-lid
containers, the pressure is estimated by picturing an imaginary liquid surface forming the paraboloid.

Fluid Statics 48
Fluid Mechanics lecture notes by David S. Ancalle (updated 8/3/2020)