Flight Stability of an Asymmetric Projectile with...
6
Flight Stability of an Asymmetric Projectile with Activating Canards Gene Cooper ∗ and Frank Fresconi † U.S. Army Research Laboratory, Aberdeen Proving Ground, Maryland 2101 and Mark Costello ‡ Georgia Institute of Technology, Atlanta, Georgia 30332 DOI: 10.2514/1.A32022 Driven by the creation of new smart projectile concepts with maneuver capability, projectile configurations with large aerodynamic asymmetries are becoming more common. Standard linear stability theory for projectiles assumes the projectile is symmetric, both from aerodynamic and mass properties perspectives. The work reported here extends standard projectile linear theory to account for aerodynamic asymmetries caused by actuating canards. Differences between standard linear and extended linear theories reported here are highlighted. To validate the theory, time simulation of the extended linear theory and a fully nonlinear trajectory simulation are made for a representative scenario, with excellent agreement noted. The extended linear-projectile theory offers a tool to address flight stability of projectiles with aerodynamic configuration asymmetries. Nomenclature C i = projectile aerodynamic coefficients C ic = projectile aerodynamic coefficients due to a canard D = projectile characteristic length (diameter), ft f, , = Euler roll, pitch, and yaw angles of projectile g = gravitational constant, ft s 2 I n , J n , K n = unit vectors for a coordinate system designated by n I X , I T = mass moments of inertia, slug ft 2 m = projectile mass, slug p, q, r = angular velocity components vector of projectile, s 1 r = atmosphere density, slug ft 3 S, S = complex and conjugate projectile yaw rates SL Cg = station-line center of gravity, ft SL COP = station-line center of pressure, ft SL COPC = station-line center of pressure of canard, ft SL MAG = station-line center of Magnus, ft u, v, w = mass center velocity components in the body reference frame, ft s 1 jV A=I j V = projectile center-of-mass velocity, ft s 1 xc, yc = displacement of canard center of pressure relative to mass center, ft = canard deflection angle with respect to projectile axis Introduction T HERE is no doubt that there are many ways to create control- lable forces and moments on a projectile to enable sufficiently large changes to its trajectory for flight control purposes. A tradi- tional and powerful way to control a projectile is through aero- dynamic force and moment changes. Examples of the type of mechanism include canards [1]. Since the flight control system usually commands an inertial position change, the control mecha- nism fixed on the body will oscillate at the roll rate of the projectile. Many aerodynamic control mechanisms (like canards) introduce an asymmetry into the basic configuration. Projectile linear theory has long been an analytical workhorse in the ballistics community. Over time, projectile linear theory has been used for stability analysis, aerodynamic coefficient estimation using range data, and fast trajectory prediction. Basic projectile linear theory has been extended by various authors to handle more sophisticated aerodynamic models [2], asymmetric configurations including mass properties [3,4], fluid payloads [5,6], moving internal parts [7–9], dual spin projectiles [10,11], ascending and descending flight [12], and lateral force impulses [13–16]. The work reported here is along these lines and develops an extended linear theory applicable to aerodynamically asymmetric projectile configurations. Moreover, the paper focuses on projectiles with dithering canards similar to that shown in Fig. 1. The extended linear theory is validated against nonlinear six-degree-of-freedom (6-DOF) calculations for an example projectile. The paper begins with a description of the basic projectile mathematical model followed by the development of the extended linear theory. The theory is then applied to an example configuration. Trajectory Equations of Motion To facilitate the mathematical description of the dynamic model, we define the vector component operator C n and the vector-product operator S as a skew symmetric matrix applied to any vector A as A I n A x J n A y K n A z C n A 8 > > < > > : A x A y A z 9 > > = > > ; SA 0 A z A y A z 0 A x A y A x 0 2 6 4 3 7 5 (1) Presented as Paper 2010-7636 at the AIAA Guidance, Navigation, and Control, Atmospheric Flight Mechanics, Modeling and Simulation Technologies, AIAA/AAS Astrodynamics Specialist , and Atmospheric and Space Environments Conferences, Toronto, 2–5 August 2010; received 20 December 2010; revision received 26 April 2011; accepted for publication 19 May 2011. This material is declared a work of the U.S. Government and is not subject to copyright protection in the United States. Copies of this paper may be made for personal or internal use, on condition that the copier pay the $10.00 per-copy fee to the Copyright Clearance Center, Inc., 222 Rosewood Drive, Danvers, MA 01923; include the code 0022-4650/12 and $10.00 in correspondence with the CCC. ∗ Research Physicist. Senior Member AIAA. † Mechanical Engineer. Member AIAA. ‡ Sikorsky Associate Professor, School of Aerospace Engineering. Associate Fellow AIAA. JOURNAL OF SPACECRAFT AND ROCKETS Vol. 49, No. 1, January–February 2012 130 Downloaded by GEORGIA INST OF TECHNOLOGY on February 7, 2013 | http://arc.aiaa.org | DOI: 10.2514/1.56602
-
Upload
phungkhanh -
Category
Documents
-
view
235 -
download
7
Transcript of Flight Stability of an Asymmetric Projectile with...

Flight Stability of an Asymmetric Projectilewith Activating Canards
Gene Cooper∗ and Frank Fresconi†
U.S. Army Research Laboratory, Aberdeen Proving Ground, Maryland 2101
and
Mark Costello‡
Georgia Institute of Technology, Atlanta, Georgia 30332
DOI: 10.2514/1.A32022
Driven by the creation of new smart projectile concepts with maneuver capability, projectile configurations with
large aerodynamic asymmetries are becoming more common. Standard linear stability theory for projectiles
assumes the projectile is symmetric, both from aerodynamic and mass properties perspectives. The work reported
here extends standard projectile linear theory to account for aerodynamic asymmetries caused by actuating canards.
Differences between standard linear and extended linear theories reported here are highlighted. To validate the
theory, time simulation of the extended linear theory and a fully nonlinear trajectory simulation are made for a
representative scenario, with excellent agreement noted. The extended linear-projectile theory offers a tool to
address flight stability of projectiles with aerodynamic configuration asymmetries.
Nomenclature
Ci = projectile aerodynamic coefficientsCic = projectile aerodynamic coefficients due to a
canardD = projectile characteristic length (diameter), ftf, �, = Euler roll, pitch, and yaw angles of projectileg = gravitational constant, ft � s�2In, Jn,Kn = unit vectors for a coordinate system designated
by nIX, IT = mass moments of inertia, slug � ft2m = projectile mass, slugp, q, r = angular velocity components vector of projectile,
s�1
r = atmosphere density, slug � ft�3S, �S = complex and conjugate projectile yaw ratesSLCg = station-line center of gravity, ftSLCOP = station-line center of pressure, ftSLCOPC = station-line center of pressure of canard, ftSLMAG = station-line center of Magnus, ftu, v, w = mass center velocity components in the body
reference frame, ft � s�1jV �A=Ij � V = projectile center-of-mass velocity, ft � s�1�xc, �yc = displacement of canard center of pressure relative
to mass center, ft� = canard deflection angle with respect to projectile
axis
Introduction
T HERE is no doubt that there are many ways to create control-lable forces and moments on a projectile to enable sufficiently
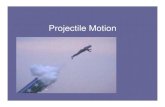
large changes to its trajectory for flight control purposes. A tradi-tional and powerful way to control a projectile is through aero-dynamic force and moment changes. Examples of the type ofmechanism include canards [1]. Since the flight control systemusually commands an inertial position change, the control mecha-nism fixed on the body will oscillate at the roll rate of the projectile.Many aerodynamic control mechanisms (like canards) introduce anasymmetry into the basic configuration.
Projectile linear theory has long been an analytical workhorse inthe ballistics community. Over time, projectile linear theory has beenused for stability analysis, aerodynamic coefficient estimation usingrange data, and fast trajectory prediction. Basic projectile lineartheory has been extended by various authors to handle moresophisticated aerodynamic models [2], asymmetric configurationsincludingmass properties [3,4],fluid payloads [5,6], moving internalparts [7–9], dual spin projectiles [10,11], ascending and descendingflight [12], and lateral force impulses [13–16]. The work reportedhere is along these lines and develops an extended linear theoryapplicable to aerodynamically asymmetric projectile configurations.Moreover, the paper focuses on projectiles with dithering canardssimilar to that shown in Fig. 1. The extended linear theory is validatedagainst nonlinear six-degree-of-freedom (6-DOF) calculations for anexample projectile.
The paper begins with a description of the basic projectilemathematical model followed by the development of the extendedlinear theory. The theory is then applied to an example configuration.
Trajectory Equations of Motion
To facilitate the mathematical description of the dynamic model,we define the vector component operator Cn and the vector-productoperator S as a skew symmetric matrix applied to any vector A as
A� InAx � JnAy �KnAz Cn�A� �
8>><>>:Ax
Ay
Az
9>>=>>;
S�A� �0 �Az Ay
Az 0 �Ax�Ay Ax 0
264
375 (1)
Presented as Paper 2010-7636 at the AIAA Guidance, Navigation, andControl, Atmospheric Flight Mechanics, Modeling and SimulationTechnologies, AIAA/AAS Astrodynamics Specialist , and Atmosphericand Space Environments Conferences, Toronto, 2–5 August 2010; received20December 2010; revision received 26 April 2011; accepted for publication19May 2011. This material is declared a work of the U.S. Government and isnot subject to copyright protection in the United States. Copies of this papermay be made for personal or internal use, on condition that the copier pay the$10.00 per-copy fee to the Copyright Clearance Center, Inc., 222 RosewoodDrive, Danvers, MA 01923; include the code 0022-4650/12 and $10.00 incorrespondence with the CCC.
∗Research Physicist. Senior Member AIAA.†Mechanical Engineer. Member AIAA.‡Sikorsky Associate Professor, School of Aerospace Engineering.
Associate Fellow AIAA.
JOURNAL OF SPACECRAFT AND ROCKETS
Vol. 49, No. 1, January–February 2012
130
Dow
nloa
ded
by G
EO
RG
IA I
NST
OF
TE
CH
NO
LO
GY
on
Febr
uary
7, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.566
02

These definitions provide a succinct method of writing the mathe-matics in this paper. Also, the standard shorthand for sine and cosineare employed: sin��� � s� and cos��� � c�.
Placing two canards, diametrically positioned on a symmetricprojectile, results in additional aeroloads that must be accounted forin the equations of motion. For this study, two canards are located atprojectile roll angles ’� 0 and ’� �; see Fig. 1. This angularseparation �� > 2�=3 introduces rotational asymmetry [3];therefore, it is preferable to write the dynamic equations in thebody reference frame. In fact, the analysis is more tractable if wework in the body frame instead of the well-known nonrolling frame,particularly if the asymmetry is fluctuating. The angular velocity ofthe body frame is
! B=I � pIB � qJB � rKB (2)
The equations ofmotion relative to the inertial and body frames are
CI� _VA=I� �c�c s�s�c � c�s c�s�c � s�s c�s s�s�s � c�c c�s�s � s�c �s� s�c� c�c�
24
35CB� _VA=I�
(3)
8<:
_�_�_
9=;�
1 s�t� c�t�0 c� �s�0 s�=c� c�=c�
24
35CB�!B=I� (4)
CB� _V�=I� �1
mCB�F� � S�!B=I�CB�V�=I� (5)
CB� _!B=I� � I�1�CB�M� � S�!B=I�ICB�!B=I�� (6)
The force acting on the projectile in Eq. (6) comprises the weightforce (W), the aerodynamic force, and the canard force (C). Theaerodynamic force is split into a standard (A) andMagnus (M) force.The combination of forces is expressed in Eq. (7):
CB�F� � CB�FW� � CB�FA� � CB�FM� � CB�FC� (7)
Equation (8) gives theweight force in the body coordinate system:
CB�FW� �mg( �s�s�c�c�c�
)(8)
Equation (9) provides the expression for the aerodynamic force thatacts upon the projectile at the aerodynamic center of pressure:
CB�FA� � ��
8�V2D2
8<:CX0 � CX2�v2 �w2�=V2
CY0 � CNAv=VCZ0 � CNAw=V
9=; (9)
Equation (10) expresses the Magnus force acting on the projectileat the Magnus force center:
CB�FM� ��
8�V2D2
( 0pDCNPAw
2V2
�pDCNPAv2V2
)(10)
The projectile forward velocity is given in Eq. (11):
V �����������������������������u2 � v2 � w2
p(11)
The moment acting on the projectile in Eq. (6) comprises themoment due to the standard aerodynamic force (A), the moment dueto the Magnus aerodynamic force (M), the unsteady aerodynamicmoment (UA), and the canard moment (C), as shown in Eq. (12):
CB�M� � CB�MA� � CB�MM� � CB�MUA� � CB�MC� (12)
The moments due to the aerodynamic and Magnus forces areexpressed in Eq. (13):
CB�MA� � S�R�!Cp�CB�FA� CB�MM� � S�R�!CM�CB�FM�(13)
The unsteady aerodynamic moments acting on the projectile areexpressed in Eq. (14):
CB�MUA� ��
8�V2D3
8<:CDD � pDCLP
2VqDCMQ
2VrDCMQ
2V
9=; (14)
The coefficients used in this aerodynamic model are specificfunctions of the projectile Mach number. For fin-stabilized projec-tiles, the classic Magnus force and moment associated with spin-stabilized projectiles are typically ignored since its effect is rathersmall for slowly rolling projectiles. AMagnusmoment with physicalmechanisms specific to fin-stabilized projectiles (more properlyexpressed as a dynamic sidemoment due to spin and angle of attack),however, may exist [17]. Expressions for the canard force XB�FC�and canard moment XB�MC� are derived in the following.
Canard Force and Moment Model
Consider the change in the aerodynamic loads on a projectilewhenthe pitch angle of a canard lifting surface is deflected. Figure 2 has aschematic of the canard configuration.
This analysis is for two canards located at projectile roll angles’� 0 and ’� � such that their respective centers of pressures are
CB�R�!C1� �
8<:�xc�yc0
9=;; CB�R�!C2� �
8<:
�xc��yc
0
9=; (15)
The relative aerodynamic velocities of the two canard liftingsurfaces are calculate from
CB�VC1=I� � CB�V�=I� � S�!B=I�CB�r�!C1�CB�VC2=I� � CB�V�=I� � S�!B=I�CB�r�!C2� (16)
Now, generate the coordinate transforms frombody coordinates ofthe canard coordinates with deflection angle �:
Fig. 1 Asymmetric airframe with or without control mechanism.
Fig. 2 Configuration of projectile with canard.
COOPER, FRESCONI, AND COSTELLO 131
Dow
nloa
ded
by G
EO
RG
IA I
NST
OF
TE
CH
NO
LO
GY
on
Febr
uary
7, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.566
02

8>><>>:
Ic1
Jc1
Kc1
9>>=>>;� T1
8>><>>:
IB
JB
KB
9>>=>>;�
c� 0 �s�0 1 0
s� 0 c�
264
3758>><>>:
IB
JB
KB
9>>=>>;; �� 0
8>><>>:
Ic2
Jc2
Kc2
9>>=>>;� T2
8>><>>:
IB
JB
KB
9>>=>>;
�c� 0 �s�0 1 0
s� 0 c�
264
375
1 0 0
0 �1 0
0 0 �1
264
3758>><>>:
IB
JB
KB
9>>=>>;; �� � (17)
Therefore, the relative velocities of the lifting surfaces written inlocal canard coordinates have the form
CC1�VC1=I� � T1CB�VC1=I�; CC2�VC2=I� � T2CB�VC2=I�(18)
Construct the angle of attack for each canard �j as
tan��1� �KC1 � CC1�VC1=I�
k�1 � IC1��CC1�VC1=I�k
tan��2� �KC2 � CC2�VC2=I�
k�1 � IC2��CC2�VC2=I�k(19)
The axial Xj and normal Nj aerodynamic forces acting on thelifting surfaces of the canards are modeled as
CCj�FAj� �
8<:Xj0
Nj
9=;� �8 �jCB�VC1=I�j2D2
8<:CX0C � CX2C�2j
0
CNAC�j
9=;(20)
Thus, the forceFC andmomentMC due to the two canards take theform
CB�FC� � T�11 CC1��FA1� � T�12 CC2��FA2�CB�MC� � S�r�!C1�T�11 CC1��FA1� � S�r�!C2�T�12 CC2��FA2�
(21)
Equation (21) shows net moment results from the canardasymmetry since the angles of attack on each canard are different.Thismeans that, duringflight, the canardsmay contribute to transientconing motion when jMCj is sufficiently large.
Extended Projectile Linear Theory
The usual assumptions corresponding to projectile linear theoryare products formed by transverse components of CB�V�=I�,
CB�VCj=I�, CB�!B=I�, and � are negligible, plus axial componentsIB � CB�V�=I� � V and IB � CB�!B=I� � p are constant. Theseassumptions lead to a fourth-order initial value system with constantcoefficients and time-dependent driving terms:8>>>>><>>>>>:
_v
_w
_q
_r
9>>>>>=>>>>>;�
� AVD
p 0 �V�p V�V2�A�
DV�V3 � 1� 0
BVD2
�M2�C�VD2
�M3�E�VD
� FV�pDD
� CVD2
BVD2
FV�pDD
EVD
2666664
3777775
8>>>>><>>>>>:
v
w
q
r
9>>>>>=>>>>>;
�
8>>>>><>>>>>:
sin�pt� gD
cos�pt� gD� ��D2V2Cnac
4m�
���xcD2V2Cnac4IT
�
���yc2pD2VCnac4IT
�
9>>>>>=>>>>>;
(22)
The full expressions for the matrix are lengthy, and they areprovided in the Appendix, which also shows the contributions due toasymmetry are (V2,V3,M2,M3). When these contributions are equalto zero, no asymmetry exists, and the system in Eq. (22) returns to thefamiliar linear theory describing symmetric projectiles written in thebody frame. The eigenvalues of the system above split into twoconjugate pairs: a fast mode and a slow mode denoted as SF and SS(SF;S � �F;S � i _�F;S), respectively. Dynamic stability of Eq. (22) isdetermined by the real parts of these eigenvalues. The linearcombination of damped and undamped sinusoid terms forming thesolution of Eq. (22) are obtained using the Laplace transformfollowed with employing the Mellin inverse formula [18]. Theparticular canard time-dependent deflection angle � used to generatein this report has the form
���sin�kt�; �� 10 (23)
Model Validation
To establish the utility of the extended projectile linear theorydeveloped above, time domain solutions from the linear model[Eq. (16)] are compared with time domain calculations of thenonlinear model [Eqs. (4–7)]. The particular example given here hasmass properties m� 1:2680 slug, moments of inertia IX � 2:449 �10�2 slug ft2 and IT � 0:51569 slug � ft2, and air density ��2:38 � 10�3 slug � ft�3. The spin rate p� 75:4 s�1, and the forwardvelocity V � 558:0 ft � s�1. This projectile’s geometry character-istics areD� 0:343521 ft, SLCOP � 0:7284 ft, SLMAG � 0:2390 ft,SLCG � 1:17787 ft, �xc� 1:2434 ft, and �yc� 0:134 ft. Theprojectile aerocoefficients are CNA � 5:8150, CNAC � 0:4875,CYPA ��28, and CMQ ��151:91, and all reference areas arebased on diameter D.
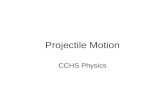
Comparisons of linear theory to nonlinear 6-DOF calculations,along with data from flight experiments, are shown in Figs. 3–6.Figure 3 compares linear theory to 6-DOF canard moment ratiosMCY=MCYMAX
as functions of time for 5:0 s< t < 8:0 s. The scale
Fig. 3 Comparison ofMCY=MCYMAXvs time.
132 COOPER, FRESCONI, AND COSTELLO
Dow
nloa
ded
by G
EO
RG
IA I
NST
OF
TE
CH
NO
LO
GY
on
Febr
uary
7, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.566
02

factor MCYMAXis the maximum value of MCY of the linear theory
calculations of the duration of the flight 0 s< t < 30 s, for which thecanard activation frequency is chosen as k� p to effectivelymaximize projectile range (glide).
A similar chart showing the canard force ratio FCZ=FCZMAXis
given in Fig. 4, and the scale factor FCZMAXis the maximum value of
the linear FCZ over the 30 s flight.The variables in Figs. 3 and 4 are chosen for comparison since the
nonlinear effects due to the 6-DOF are most dissimilar for the canardforce andmoment. A chart comparing linear and 6-DOF calculationsof the similarly scaled q=q
MAXratios is shown in Fig. 5
One way to view the angular motion of this asymmetric projectileis to consider the time dependence of �, �, defined as follows [3]:
���
��
8>><>>:tan�1
�cos�pt�v�sin�pt�w
V
�
tan�1�
cos�pt�w�sin�pt�vV
�9>>=>>; (24)
Figure 6 has a chart for flight times t � 30 s comparing lineartheory and 6-DOF calculations along with flight-test data of theprojectile modeled in the above calculations [19].
Evidently, linear theory capturesmost of the physics governing theangular motion of this projectile when subjected to two activatingcanards configured at �� 0 and �� �. The magnitude of transitoryconing behavior for t � 30 s is caused by the canard moments MC
and the body moment B. Essentially, the canards induce the angle ofattack in the body. At the angle of attack, the Magnus moment of thebody contributes to the transient coning along with the canardactuation. In the plot of Fig. 6, theMagnusmoment appears as nearlycircular orbits that complete a full revolution at the projectile yaw
rate. The perturbations in the orbits of Fig. 6 are due to the fastercanard actuation frequency. The canard actuation-induced angle ofattack is near 3 , as seen in Fig. 6. The experimental and lineartheory-based transient coning magnitude is around 3 , and theangular motion perturbations due to canard actuation at the roll rateare evident in Fig. 6.
The steady-state coning motion corresponding to the particularsolution of Eq. (22) is attained for flight times� 200 s due to the sizeof j�F;Sj. This steady-state motion is an offset ellipse centered at the
Fig. 4 Comparison of FCZ=FCZMAXvs time.
Fig. 5 Comparison of q=qMAX
vs time.
Fig. 6 Comparisons of transient coning motions for time � 30 s.
COOPER, FRESCONI, AND COSTELLO 133
Dow
nloa
ded
by G
EO
RG
IA I
NST
OF
TE
CH
NO
LO
GY
on
Febr
uary
7, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.566
02

geometric center of Fig. 6 with vanishing small radii (analysis notpresented here since the expressions are judged to be too long).
Stability Analysis
Numerical values of fast and slow eigenvalues SF;S are presentedas functions of projectile spin rate p, given in Figs. 7 and 8. The slowmode SS is real and positive for 10:2 s�1 � p � 13:3 s�1, whichindicates dynamic instability; see Fig. 5 of [3]. As p increases,p � 79:0 s�1, causes the fast mode contribution to grow unstable.
Another way to present the numerical values of fast and sloweigenvalues SF;S is to form a root locus plot for changing projectilespin rate p, shown in Fig. 9.
These eigenvalues provide a tool for addressing dynamic stabilityof the asymmetric canard configuration modeled in this effort.
Sinusoidal driving terms representing canard actuation [Eq. (23)]cause component solutions of Eq. (23) to have terms with form
G�t�� _�F;S � k�2 � �2F;S
G�t� represents a time-dependent numerator (25)
Thus, in the event j�F;Sj � 1, k! j _�F;Sjmaypotentially generateflight instability when the canards are actuated as sinusoids. Ametricto demonstrate this potential problem is defined in Eq. (26):
Max������������������2 � �2
p8 t 2 �0; 30 s� (26)
Figure 10 shows a plot of this behavior where the spin rate is heldconstant p� 75:4 s�1 for varying values of k.
Apparently, when the frequency k is in the neighborhood of the
fast mode, the frequency _�F causes the strongest destabilizing effect.
Fig. 7 Fast and slow real roots �FAST;SLOW as functions of spin rate p.
0
20
40
60
80
100
120
0 20 40 60 80 100 120
Spin Rate p (s-1 )
Imag SF,S vs Spin Rate p
P
φ.
FAST
φ.
SLOW
φ. (s-1
)
Fig. 8 Fast and slow real roots �FAST;SLOW as functions of spin rate p.
Fig. 9 Fast and slow roots S parameterized by projectile spin rate p.
0
20
40
60
80
100
120
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
Deg
rees
( αα2 + ββ2)1/2 at time t=30s, p = 75.4 s-1
Slow Mode
Fast Mode
Fk
Fig. 10 Metric resonance vs k= _�F.
134 COOPER, FRESCONI, AND COSTELLO
Dow
nloa
ded
by G
EO
RG
IA I
NST
OF
TE
CH
NO
LO
GY
on
Febr
uary
7, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.566
02

Conclusions
An extension of the familiar linear-projectile theory for symmetricand asymmetric projectiles has been formulated and solved. Thisextension accounts for configuration asymmetries caused by twoactuating canards placed at roll angles �� 0 and �� �. Thedocumentation shows that a wide class of configuration asymmetriescan be addressed by the techniques given in this report. One of theresults obtained in this paper presents a way to analyze the dynamicstability of projectiles exhibiting asymmetries. This can have animportant impact on the design of projectiles. The importance ofcanard actuation focuses on a potential problem causing flightinstability when the actuation frequencies are too close to one of themodal yawing frequencies. A spinning projectile with two canardsactivated as sinusoids was shown to contribute to transient coningmotion when this additional moment was sufficiently large. Theclosed-form solutions discussed in this report were shown tocompare well with standard 6-DOF calculations. Postprocessingsolutions given here to obtain all state components of asymmetricprojectiles may prove useful in developing firmware. The asym-metric linear theory reduces to the familiar linear symmetric theorywhen the asymmetries vanish.
Appendix
A� ��D3CNA
8 mB� ��pD
5CYPA�SLMAG � SLCG�16ITV
C� ��D4CNA�SLCOP � SLCG�
8ITE� ��D
5CMQ16IT
F� pDIxITV
V2 ����D3CNAC
4mV3 �
��D2�xcCNAC4m
M2 ���D4�xcCNAC
4ITM3 ��
��D3�xc2CNAC4IT
References
[1] Fresconi, F., and Plostins, P., “Control Mechanism Strategies for Spin-Stabilized Projectiles,” Journal of Aerospace Engineering, Vol. 224,No. 9 2010, pp. 979–991.doi:10.1243/09544100JAERO705
[2] Murphy, C. H., “Symmetric Missile Dynamic Instabilities: A Survey,”18th AIAA Aerospace Sciences Meeting, AIAA Paper 1980-0320,Jan 1980.
[3] Charles H. Murphy, “Angular Motion of Spinning Almost SymmetricMissiles,” Journal of Guidance, Control, and Dynamics, Vol. 2, No. 6,Nov.–Dec. 1979, pp. 504–510.doi:10.2514/3.55916
[4] Hodapp, A. E., “Effect of Mass Asymmetry on Ballistic Match ofProjectiles,” Journal of Spacecraft and Rockets, Vol. 13, No. 12, 1976,pp. 757–760.doi:10.2514/3.57137
[5] Weber, D. J., “Simplified Method for Evaluating the Flight Stability ofLiquid-Filled Projectiles,” Journal of Spacecraft and Rockets, Vol. 31,No. 1, 1994, pp. 130–134.
doi:10.2514/3.26412[6] Murphy, C.H., “AngularMotion of a Spinning Projectilewith aViscous
Liquid Payload,” Journal of Guidance, Control, and Dynamics, Vol. 6,No. 4, July–Aug. 1983, pp. 280–286.doi:10.2514/3.19830
[7] Murphy, C. H., “Influence of Moving Internal Parts on the AngularMotion of Spinning Projectiles,” Journal of Guidance, Control, and
Dynamics, Vol. 1, No. 2, March–April 1978, pp. 117–122.doi:10.2514/3.55753
[8] Cobb, K. K., Whyte, R. H., and Laird, P. K., “The Effects of a MovingComponents on the Motion of a 20-mm Projectile,” 11th AIAAAerodynamics Testing Conference, New York, AIAA Paper 1980-0428, 1980.
[9] Hodapp, A. E., “PassiveMeans for Stabilizing Projectiles with PartiallyRestrained Internal Members,” Journal of Guidance, Control, and
Dynamics, Vol. 12, No. 2, 1989, pp. 135–139.doi:10.2514/3.20382
[10] Soper, W. G., “Projectile Instability Produced by Internal Friction,”AIAA Journal, Vol. 16, No. 1, 1978, pp. 1–11.doi:10.2514/3.60848
[11] Costello,M., and Peterson,A., “Linear Theory of aDual-Spin Projectilein Atmospheric Flight,” Journal of Guidance, Control, and Dynamics,Vol. 23, No. 5, 2000, pp. 789–797.doi:10.2514/2.4639
[12] Cooper, G., “Extending the Jump Analysis for AerodynamicAsymmetry,” Journal of Spacecraft and Rockets, Vol. 43, No. 3,May–June 2006, pp. 700–703.doi:10.2514/1.17718
[13] Murphy, C. H., “Instability of Controlled Projectiles in Ascending orDescending Flight,” Journal of Guidance, Control, and Dynamics,Vol. 4, No. 1, 1981, pp. 66–69.doi:10.2514/3.19716
[14] Cooper, G., “Influence of Yaw Cards on the Yaw Growth of SpinStabilized Projectiles,” Journal of Aircraft, Vol. 38, No. 2, 2001,pp. 266–270.doi:10.2514/2.2784
[15] Guidos, B., andCooper,G., “Closed FormSolution of Finned ProjectileMotion Subjected to Simple In-Flight Lateral Impulse,” AIAAPaper 2000-0767, 2000.
[16] Burchett, B., Peterson, A., and Costello, M., “Prediction of ServingMotion of a Dual-Spin Projectilewith Lateral Pulse Jets in AtmosphericFlight,” Mathematical and Computer Modelling, Vol. 35, Nos. 1–2,2002, pp. 1–14.doi:10.1016/S0895-7177(01)00143-1
[17] Pechier, M., Guillen, P., and Cayzac, R., “Magnus Effect over FinnedProjectiles,” Journal of Spacecraft and Rockets, Vol. 38, No. 4, July–Aug. 2001, pp. 542–549.doi:10.2514/2.3714
[18] Carrier, G. F., Krook, M., and Pearson, C. E., Functions of a Complex
Variable: Theory and Technique, Hod Books, Ithaca, NY, 1983,pp. 364–365.
[19] Fresconi, F., and Harkins, T., “Aerodynamic Characterizations ofAsymmetric and Maneuvering 105 mm, 120 mm, and 155 mm Fin-Stabilized Projectiles Derived from Telemetry Experiments,” AIAAAtmospheric Flight Mechanics Conference, AIAA, Paper 2011-6268,Aug. 2011.
M. MillerAssociate Editor
COOPER, FRESCONI, AND COSTELLO 135
Dow
nloa
ded
by G
EO
RG
IA I
NST
OF
TE
CH
NO
LO
GY
on
Febr
uary
7, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.566
02