
Flatness-based nonlinear control strategies for trajectory ...
37
Flatness-based nonlinear control strategies for trajectory tracking of quadcopter systems under faults Ngoc Thinh Nguyen * Ionela Prodan * Florin Stoican** Laurent Lef` evre * * Univ. Grenoble Alpes, LCIS, F-26902, Valence, France, Email: {ngoc-thinh.nguyen,ionela.prodan,laurent.lefevre}@lcis.grenoble-inp.fr ** Univ. Politehnica of Bucharest, Automatic Control and Systems Engineering Department, Bucharest, Romania, Email: fl[email protected] November 15, 2016 Journ´ ee GDR MACS, Lille, France Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 1 / 26
Transcript of Flatness-based nonlinear control strategies for trajectory ...

Flatness-based nonlinear control strategies for trajectory tracking ofquadcopter systems under faults
Ngoc Thinh Nguyen∗ Ionela Prodan∗ Florin Stoican** Laurent Lefevre∗
∗Univ. Grenoble Alpes, LCIS, F-26902, Valence, France,Email: {ngoc-thinh.nguyen,ionela.prodan,laurent.lefevre}@lcis.grenoble-inp.fr
∗∗Univ. Politehnica of Bucharest, Automatic Control and Systems Engineering Department, Bucharest, Romania,Email: [email protected]
November 15, 2016
Journee GDR MACS, Lille, France
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 1 / 26

Quadcopters have a long history
Breguet-Richet Gyroplane No.1 Oemichen No.2 DJI Phantom 41907 1920
Bitcraze Crazyfile 2.0 Bell Boeing V–22 Osprey Ambulance Drone
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 2 / 26

Quadcopters have a long history
Breguet-Richet Gyroplane No.1 Oemichen No.2 DJI Phantom 41907 1920
Bitcraze Crazyfile 2.0 Bell Boeing V–22 Osprey Ambulance Drone
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 2 / 26

Outline
1 Quadcopter modellingKinematicsDynamics
2 Differential flatness characterization
3 Flat output description of the quadcopter system
4 Control design for trajectory tracking
5 Simulation results
6 Conclusions and future developments

Quadcopter modelling Kinematics
Kinematics of quadcopter
Euler ZYX (ψ, θ, φ) rotation sequence:
IBR = RZ (ψ)RY (θ)RX (φ) =
cθcψ sφsθcψ − cφsψ cφsθcψ + sφsψcθsψ sφsθsψ + cφcψ cφsθsψ − sφcψ−sθ sφcθ cφcθ
The angular velocity B−→ω physically measured by the gyroscope B−→ω , (ωx ωy ωz )T is expressedin term of 3 Euler angles η , (φ, θ, ψ)T as:
B−→ω =
1 0 −sθ0 cφ sφcθ0 −sφ cφcθ
φθψ
= W η
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 2 / 26

Quadcopter modelling Kinematics
Kinematics of quadcopter
Euler ZYX (ψ, θ, φ) rotation sequence:
IBR = RZ (ψ)RY (θ)RX (φ) =
cθcψ sφsθcψ − cφsψ cφsθcψ + sφsψcθsψ sφsθsψ + cφcψ cφsθsψ − sφcψ−sθ sφcθ cφcθ
The angular velocity B−→ω physically measured by the gyroscope B−→ω , (ωx ωy ωz )T is expressedin term of 3 Euler angles η , (φ, θ, ψ)T as:
B−→ω =
1 0 −sθ0 cφ sφcθ0 −sφ cφcθ
φθψ
= W η
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 2 / 26

Quadcopter modelling Kinematics
Kinematics of quadcopter
Euler ZYX (ψ, θ, φ) rotation sequence:
IBR = RZ (ψ)RY (θ)RX (φ) =
cθcψ sφsθcψ − cφsψ cφsθcψ + sφsψcθsψ sφsθsψ + cφcψ cφsθsψ − sφcψ−sθ sφcθ cφcθ
The angular velocity B−→ω physically measured by the gyroscope B−→ω , (ωx ωy ωz )T is expressedin term of 3 Euler angles η , (φ, θ, ψ)T as:
B−→ω =
1 0 −sθ0 cφ sφcθ0 −sφ cφcθ
φθψ
= W η
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 2 / 26

Quadcopter modelling Dynamics
Forces and torques created by the 4 propellers
ω3
τ3
ω1
τ1
ω4
τ4
ω2
τ2
BxBy
Bz
f4
f3 f2
f1
Aerodynamic forces and torques(Spakovszky (2007)):
fi = KTω2i
τi ≈ (−1)ibω2i
Total thrust force and torques acting on the quadcopter (Formentin and Lovera (2011)):
T =4∑
i=1
fi = KT
4∑i=1
ω2i
τφ = Lf4 − Lf2 = LKT
(ω2
4 − ω22
)τθ = Lf3 − Lf1 = LKT
(ω2
3 − ω21
)τψ =
4∑i=1
τi = b(−ω2
1 + ω22 − ω2
3 + ω24
)Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 3 / 26

Quadcopter modelling Dynamics
Newton-Euler formalism
Translation equation:
mξ = m−→g + (IBR)−→T +
−→FD ,
where ξ , (x , y , z)T represents the position of the quadcopter in the IF, m is the system mass,−→T
is the thrust force in BF and−→FD is the external perturbation force.
ω3
τ3
ω1
τ1
ω4
τ4
ω2
τ2
BxBy
Bz
f4
f3 f2
f1
Rotation equation:B IB−→ω +B −→ω × (B IB−→ω ) = τη ,
where B I is a diagonal inertial matrix, τη , (τφ, τθ, τψ)T gathers the roll, pitch and yaw torquesand ‘×’ denotes the cross-product of two vectors.
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 4 / 26

Outline
1 Quadcopter modelling
2 Differential flatness characterizationDifferential flatnessB-spline curvesConstrained parametrization
3 Flat output description of the quadcopter system
4 Control design for trajectory tracking
5 Simulation results
6 Conclusions and future developments

Differential flatness characterization Differential flatness
Flat systems and their trajectories
Consider the continuous nonlinear system
x(t) = f (x(t), u(t)),
it is called differentially flat if there exist z(t) s.t. the states and inputs can be algebraicallyexpressed in terms of z(t) and a finite number of its derivatives:
x(t) = Φ0(z(t), z(t), · · · , z(q)(t)),
u(t) = Φ1(z(t), z(t), · · · , z(q+1)(t)),
where
z(t) = γ(x(t), u(t), u(t), · · · , u(q)(t))
z = γ(x, u, u, . . . )
x = Φ0(z, z, . . . )
u = Φ1(z, z, . . . )
Input/State space Flat Output space
For any linear and nonlinear flat system, the number of flat outputs equals the number ofinputs Levine (2009), Fliess et al. (1995)
For linear systems, the flat differentiability is implied by the controllability propertySira-Ramırez and Agrawal (2004)
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 5 / 26

Differential flatness characterization B-spline curves
B-spline curve generation
Considering a collection of control points
P = {p0, p1, . . . , pn} ,we rewrite the knot-vector as
T = (τ0, τ1, . . . , τd−1︸ ︷︷ ︸d equal knots
, τd , τd+1, . . . τn−1, τn,︸ ︷︷ ︸n−d+1 internal knots
τn+1, τn+d︸ ︷︷ ︸d equal knots
)
and define a B-spline curve as a linear combination of the control points and the B-spline basisfunctions
z(t) =n∑
i=0
Bi,d (t)pi = PBd (t)
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 6 / 26

Differential flatness characterization Constrained parametrization
Constrained parametrization – ILet us consider a collection of N + 1 way-points and time stamps associated to them Prodan (2012):
W = {wk} and TW = {tk},for any k = 0, . . . ,N.
The goal is to construct a flat trajectory which passes through each way-point wk at the time instant tk , i.e.,find a flat output z(t)such that
x(tk ) = Θ(z(tk ), . . . z(r)(tk )) = wk , ∀k = 0 . . .N.
Θ(Bd (tk ),P) = wk , ∀k = 0 . . .N,
where Θ(Bd (t),P) = Θ(PBd (t), . . . ,PMrLrBd (t)) is constructed along property (P5).
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 7 / 26

Differential flatness characterization Constrained parametrization
Constrained parametrization – II
Solve an optimization problem Stoican et al. (2016), De Dona et al. (2009), Suryawan (2012):
P = arg minP
∫ tN
t0
||Ξ(Bd (t),P)||Qdt
s.t. Θ(Bd (tk ),P) = wk , ∀k = 0 . . .N
with Q a positive symmetric matrix.
The cost Ξ(Bd (t),P) = Ξ(Θ(Bd (t),P), Φ(Bd (t),P)) can impose any penalization we deem to benecessary (length of the trajectory, input variation, input magnitude, etc).
In general, such a problem is nonlinear (due to mappings Θ(·) and Φ(·)) and hence difficult to solve.
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 8 / 26
Outline
1 Quadcopter modelling
2 Differential flatness characterization
3 Flat output description of the quadcopter system
4 Control design for trajectory tracking
5 Simulation results
6 Conclusions and future developments

Flat output description of the quadcopter system
Flat output description of the quadcopter system
The flat output vector is considered as:
z =[z1 z2 z3 z4
]>=[x y z tan
(ψ2
)]>,
The states and inputs described in term of z:
x =[ξ> η>
]>=[x y z φ θ ψ
]>u =
[T τφ τθ τψ
]>
ω3
τ3
ω1
τ1
ω4
τ4
ω2
τ2
BxBy
Bz
f4
f3 f2
f1
φ = arcsin
2z4z1 − (1− z24 )z2
(1 + z24 )√
z12 + z2
2 + (z3 + g)2
θ = arctan
((1− z2
4 )z1 + 2z4z2
(1 + z24 )(z3 + g)
)ψ = 2arctan(z4)
T = m√
z12 + z2
2 + (z3 + g)2
τη =B I(W η + W η
)+ (W η)× (B IW η)
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 9 / 26

Flat output description of the quadcopter system
Intensively studied trajectory generation problem
Specifications which need to be taken into account at the off-line and on-line stages:
internal dynamics of the system
state and input constraints fulfillment
optimization problem such that a certain objective is minimized/maximized (e.g, lengthcurve, total energy, dissipating energy, wind effects)
trajectory reconfiguration mechanisms
obstacle avoidance specifications
multi–trajectory generation
Stoican et al. (2016), Prodan et al. (2013a), Chamseddine et al. (2012), Suryawan et al. (2011), De Dona et al.(2009), Formentin and Lovera (2011); Sydney et al. (2013)
For further use, the references for states and inputs are denoted as:
x =[ξ> η>
]>=[x y z φ θ ψ
]>u =
[T τφ τθ τψ
]>
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 10 / 26

Outline
1 Quadcopter modelling
2 Differential flatness characterization
3 Flat output description of the quadcopter system
4 Control design for trajectory trackingGeneral control schemeTorque controllerAttitude controllerRobustness under stuck actuator fault
5 Simulation results
6 Conclusions and future developments

Control design for trajectory tracking General control scheme
General control scheme
Cη(ξ, ξref)
Attitude controllerCτ(η, ηref)
Torque controller
ξ = fξ(η, T )
ω = fη(η)
ω = fω(ω, τη)
Quadcopter dynamics
τη
C
ηηref
B′′
T
B′ ξ,ψξref
A
Method:
feedback linearization control via flatness
computed torque control
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 11 / 26

Control design for trajectory tracking General control scheme
Computed torque based control law
Consider the general dynamics of mechanical system:
M(Φ)Φ + V (Φ, Φ) = τΦ
Computed torque concept Craig (2005) considers:
τΦ = ατ ′ + β
where the model-based portions α, β and the servo portion τ ′ are given as:
α = M(Φ), β = V (Φ, Φ)
τ ′ = Φr + KpE + Kd E + Ki
∫Edt
with E = Φr − Φ.The controlled system becomes:
M(q)Φ + V (Φ, Φ) = M(q)
(Φr + KpE + Kd E + Ki
∫Edt
)+ V (Φ, Φ)
⇒ E + Kd E + KpE + Ki
∫Edt = 0
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 12 / 26

Control design for trajectory tracking Torque controller
Torque controller
Consider the rotational equation of the quadcopter:
B IW η +B I W η + (W η)× (B IW η) = τη
Applying the computed torque based control law, the input angle torques can be considered as:
τη =B IW
(ηr + KpηEη + KdηEη + Kiη
∫Eηdt
)+B I W η + (W η)× (B IW η)
⇒ Eη + KdηEη + KpηEη + Kiη
∫Eηdt = 0
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 13 / 26

Control design for trajectory tracking Attitude controller
Attitude controller
Consider the roll, pitch, yaw angles and input thrust T in terms of the flat output z:
φ = arcsin
2z4z1 − (1− z24 )z2
(1 + z24 )√
z12 + z2
2 + (z3 + g)2
= Γφ(z1, z2, z3, z4)
θ = arctan
((1− z2
4 )z1 + 2z4z2
(1 + z24 )(z3 + g)
)= Γθ(z1, z2, z3, z4)
ψ = 2 arctan(z4) = Υψ(z4)
T = m√
z12 + z2
2 + (z3 + g)2 = ΓT (z1, z2, z3)
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 14 / 26

Control design for trajectory tracking Attitude controller
Attitude controller (cont.)
The feedback linearization based control law for attitude controller:
φref = Γφ(z1∗, z2
∗, z3∗, z4),
θref = Γθ(z1∗, z2
∗, z3∗, z4),
ψref = Υψ(z4),
T = ΓT (z1∗, z2
∗, z3∗),
where the corrective term ξ∗ ,[z1∗ z2∗ z3∗
]>is given as:
ξ∗ = ξref + Kdξ εξ + Kpξεξ + Kiξ
∫εξdt,
and z4 is the real value of ψ angle.
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 15 / 26

Control design for trajectory tracking Robustness under stuck actuator fault
Stuck rotor fault modeling
The rotor speed under stuck fault consideration is modeled through (Qi et al. (2013)):
ωfi (t) = fi (t)ωi (t) + (1− fi (t))αiωmax ,
where fi (t) is the binary fault signal and αi ∈ (0, 1) is the constant fault magnitude.
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 16 / 26

Control design for trajectory tracking Robustness under stuck actuator fault
Fault tree analysisA FDD (Fault Detection and Diagnosis) module is used to detect, isolate, and identify the faultmagnitude αi .
* used to ensure the quadcopter’s capability of maintaining the position while waiting for thenew trajectory and after finishing the tracking mission;
** used to ensure the tracking capability for the a priori trajectory or to generate a new feasibletrajectory.
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 17 / 26

Control design for trajectory tracking Robustness under stuck actuator fault
Conditions under stuck rotor fault
Hovering condition∗: considering a unique i th rotor stuck, the quadcopter can still assumehovering if the following constraint is respected:
α2i ≤
mg
2KTω2max
.
Tracking condition∗∗: considering a unique i th stuck rotor we have that a sufficient condition fortracking the position component of the reference trajectory is:
0 ≤ min
(MPi )−1
Tτφτθ
− (MPi )−1MKiα
2i ω
2max
,
max
(MPi )−1
Tτφτθ
− (MPi )−1MKiα
2i ω
2max
≤ ω2max ,
where Ki ∈ R4 is the i th column of the identity matrix I4 of size 4, the matrix Pi ∈ R4×3 iscomposed of the other columns of I4 and
M =
KT KT KT KT
0 −LKT 0 LKT
−LKT 0 LKT 0
.
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 18 / 26

Control design for trajectory tracking Robustness under stuck actuator fault
Control reconfiguration under stuck rotor
Reconfigured controller under fault of the 4th stuck rotor:
where the matrix M4 is calculated as:
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 19 / 26

Outline
1 Quadcopter modelling
2 Differential flatness characterization
3 Flat output description of the quadcopter system
4 Control design for trajectory tracking
5 Simulation resultsTrajectory generationTrajectory tracking
6 Conclusions and future developments

Simulation results Trajectory generation
Waypoint trajectory generationGenerate the trajectory passing through 5 way points at specific time instants taking into accountthe operating constraints while minimize the length of the trajectory.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0
0.5
1
1.5
2
4.5
5
5.5
6
6.5
7
7.5
East [m]North [m]
Altitud
e[m
]flat referenceway-pointscontrol pointscontrol polygon
Simulation of wind disturbances:
Nominal Moderate Strong0 km/h 15.3 km/h 20.5 km/h
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 20 / 26

Simulation results Trajectory generation
Waypoint trajectory generation
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 100
2
4
6
8
Time [s]
Pos
itio
n[m
]
Flat trajectory and the associated control points
Boundary XBoundary YBoundary ZX(t)Y(t)Z(t)
Flat reference of the angles
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10−10
0
10
20
Time [s]
[deg
ree] φ
θ
ψ
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 21 / 26

Simulation results Trajectory tracking
Trajectory tracking
Simulation of combined flat angle and position tracking strategyin strong wind condition (20.5 km/h)
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 22 / 26

Simulation results Trajectory tracking
Trajectory tracking under stuck rotor fault
Simulation of way-point tracking under fault in strong wind conditions.The 4th rotor is permanently stuck from t = 5 sec.
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 23 / 26

Simulation results Trajectory tracking
Trajectory tracking under fault of stuck rotor
Scenario 1: Healthy rotors
Scenario 2: the 4th stuck rotor
−0.4−0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4
−1
0
1
20
0.1
0.2
0.3
0.4
0.5
0.6
North [m]East [m]
Altitude[m
]
Actual motion of the quadcopter under different scenarios
Scenario 1Scenario 2ReferenceWay points
Actual motions under differentscenarios
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10
−4
−2
0
2
4
6
8
10
Time [s]
Angles
[degree]
Quadcopter Euler Angles under different scenarios
Scenario 1: φScenario 1: θScenario 1: ψScenario 2: φScenario 2: θScenario 2: ψφ
θ
ψ
Angles under different scenarios
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 105,800
5,850
5,900
5,950
6,000
6,050
6,100
6,150
6,200
6,250
Time [s]
Rot
orSpee
d[r
pm
]
Quadcopter rotors speed
ω1 (faulty)ω2 (faulty)ω3 (faulty)ω4 (faulty)ω1 (healty)ω2 (healty)ω3 (healty)ω4 (healty)
Rotors speed under different scenarios
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 24 / 26
Simulation results Trajectory tracking
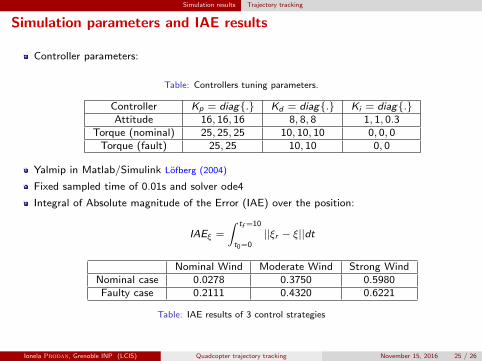
Simulation parameters and IAE results
Controller parameters:
Table: Controllers tuning parameters.
Controller Kp = diag{.} Kd = diag{.} Ki = diag{.}Attitude 16, 16, 16 8, 8, 8 1, 1, 0.3
Torque (nominal) 25, 25, 25 10, 10, 10 0, 0, 0Torque (fault) 25, 25 10, 10 0, 0
Yalmip in Matlab/Simulink Lofberg (2004)
Fixed sampled time of 0.01s and solver ode4
Integral of Absolute magnitude of the Error (IAE) over the position:
IAEξ =
∫ tf =10
t0=0||ξr − ξ||dt
Nominal Wind Moderate Wind Strong WindNominal case 0.0278 0.3750 0.5980Faulty case 0.2111 0.4320 0.6221
Table: IAE results of 3 control strategies
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 25 / 26
Outline
1 Quadcopter modelling
2 Differential flatness characterization
3 Flat output description of the quadcopter system
4 Control design for trajectory tracking
5 Simulation results
6 Conclusions and future developments

Conclusions and future developments
Conclusions and future developments
Conclusions:
Quadcopter modeling using Newton-Euler formalism
Novel flat output representation
Trajectory generation problem
Feedback linearization based control designs for trajectory tracking
Robustness under bounded wind perturbations
Control reconfiguration analysis under stuck rotor fault
Extensive simulations for different wind conditions
Future development:
MPC/NMPC implementations
Bounded/stochastic disturbances considerations
Trajectory reconfiguration mechanisms
Experiments on the Crazyflie platform
0Prodan I., Stoican F., Olaru S. and Niculescu S-I. (2016): Mixed-Integer Representations in Control Design, SpringerBriefs inControl, Automation and Robotics Series, Springer.
Ionela Prodan, Grenoble INP (LCIS) Quadcopter trajectory tracking November 15, 2016 26 / 26

References IA. Chamseddine, Y. Zhang, C.A. Rabbath, C. Join, and D. Theilliol. Flatness-based trajectory planning/replanning for a quadrotor unmanned aerial vehicle.
IEEE Transactions on Aerospace and Electronic Systems, 48(4):2832–2848, 2012.
J.J. Craig. Introduction to robotics: mechanics and control, volume 3. Pearson Prentice Hall Upper Saddle River, 2005.
J. De Dona, F. Suryawan, M. Seron, and J. Levine. A flatness-based iterative method for reference trajectory generation in constrained NMPC. Int.Workshop on Assesment and Future Direction of Nonlinear Model Predictive Control, pages 325–333, 2009.
M. Fliess, J. Levine, P. Martin, and P. Rouchon. Flatness and defect of non-linear systems: introductory theory and examples. International journal ofcontrol, 61(6):1327–1361, 1995.
Simone Formentin and Marco Lovera. Flatness-based control of a quadrotor helicopter via feedforward linearization. In CDC-ECE, pages 6171–6176, 2011.
J. Levine. Analysis and control of nonlinear systems: A flatness-based approach. Springer Verlag, 2009.
J. Lofberg. Yalmip : A toolbox for modeling and optimization in MATLAB. In Proceedings of the CACSD Conference, Taipei, Taiwan, 2004. URLhttp://users.isy.liu.se/johanl/yalmip.
I. Prodan. Control of Multi-Agent Dynamical Systems in the Presence of Constraints. PhD thesis, Supelec, 2012.
I. Prodan, F. Stoican, S. Olaru, and Niculescu S.I. Enhancements on the Hyperplanes Arrangements in Mixed-Integer Techniques. Journal of OptimizationTheory and Applications, 154(2):549–572, 2012a. doi: 10.1007/s10957-012-0022-9.
I. Prodan, F. Stoican, S. Olaru, C. Stoica, and S-I. Niculescu. Mixed-integer programming techniques in distributed mpc problems. In Distributed MPCmade easy, number 69, pages 273–288. Springer, 2012b.
I. Prodan, S. Olaru, R. Bencatel, J. Sousa, C. Stoica, and S.I. Niculescu. Receding horizon flight control for trajectory tracking of autonomous aerialvehicles. Control Engineering Practice, 21(10):1334–1349, 2013a. doi: 10.1016/j.conengprac.2013.05.010.
I. Prodan, S. Olaru, C. Stoica, and S.I. Niculescu. Predictive control for trajectory tracking and decentralized navigation of multi-agent formations.International Journal of Applied Mathematics and Computer Science, 23(1):91–102, 2013b. doi: 10.2478/amcs-2013-0008.
I. Prodan, S. Olaru, F. Fontes, F. Pereira, C. Stoica Maniu, and S.-I. Niculescu. Predictive control for path following. from trajectory generation to theparametrization of the discrete tracking sequences. In Topics in optimization based control and estimation, pages 161–181. Springer, 2015.
Xin Qi, Didier Theilliol, Juntong Qi, Youmin Zhang, and Jianda Han. A literature review on fault diagnosis methods for manned and unmanned helicopters.In Unmanned Aircraft Systems (ICUAS), 2013 International Conference on, pages 1114–1118. IEEE, 2013.
H. Sira-Ramırez and S. Agrawal. Differential Flatness. Marcel Dekker, New York, 2004.
Z. S. Spakovszky. Unified: Thermodynamics and propulsion, 2007. http://web.mit.edu/16.unified/www/FALL/thermodynamics/notes/notes.html.
F. Stoican, I. Prodan, and D. Popescu. Flat trajectory generation for way-points relaxations and obstacle avoidance. In Proceedings of the 23th IEEEMediterranean Conference on Control and Automation, pages 695–700. IEEE, 2015.
Florin Stoican, Vlad-Mihai Ivanusca, Ionela Prodan, and Dan Popescu. Obstacle avoidance via b-spline parameterizations of flat trajectories. In Proceedingsof the 24th Mediterranean Conference on Control and Automation, pages 1002–1007, Athens, Greece, 2016.
F. Suryawan. Constrained Trajectory Generation and Fault Tolerant Control Based on Differential Flatness and B-splines. PhD thesis, 2012.
F. Suryawan, J. De Dona, and M. Seron. Minimum-time trajectory generation for constrained linear systems using flatness and b-splines. InternationalJournal of Control, 84(9):1565–1585, 2011.
Nitin Sydney, Brendan Smyth, and Derek A Paley. Dynamic control of autonomous quadrotor flight in an estimated wind field. In Decision and Control(CDC), 2013 IEEE 52nd Annual Conference on, pages 3609–3616. IEEE, 2013.

















