Flag structures on smooth manifolds: equivalence and applications
53
The problem, examples and motivations Flag structures Other geometric structures Behind the scene Flag structures on smooth manifolds: equivalence and applications Boris Doubrov (joint work with Igor Zelenko) Belarusian State University Nordfjordeid, 05/06/2013 Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and application
Transcript of Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Flag structures on smooth manifolds: equivalenceand applications
Boris Doubrov(joint work with Igor Zelenko)
Belarusian State University
Nordfjordeid, 05/06/2013
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Outline
1 The problem, examples and motivationsGeometric structures on solution spaceMotivating examples
2 Flag structuresDefinitionFlag structures from systems of ODEs
3 Other geometric structuresConformal and symplectic structuresOther G -structures
4 Behind the sceneBehind the scene
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Geometric structures on solution spaceMotivating examples
Geometric structures on the solution space of differentialequations
Consider a differential equation of finite type (=finite-dimensional space of solutions).
For example, systems of ordinary differential equations.
It reduces (maybe after a series of prolongations) to acompletely integrable distribution with solutions as fibers ofthis distribution.
Locally we can define the structure of a smooth manifold onthe solution space.
Are there any natural geometric structures on this manifold?
Questions: which geometric structures? what does “natural”mean?
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Geometric structures on solution spaceMotivating examples
Geometric structures on the solution space of differentialequations
Consider a differential equation of finite type (=finite-dimensional space of solutions).
For example, systems of ordinary differential equations.
It reduces (maybe after a series of prolongations) to acompletely integrable distribution with solutions as fibers ofthis distribution.
Locally we can define the structure of a smooth manifold onthe solution space.
Are there any natural geometric structures on this manifold?
Questions: which geometric structures? what does “natural”mean?
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Geometric structures on solution spaceMotivating examples
Geometric structures on the solution space of differentialequations
Consider a differential equation of finite type (=finite-dimensional space of solutions).
For example, systems of ordinary differential equations.
It reduces (maybe after a series of prolongations) to acompletely integrable distribution with solutions as fibers ofthis distribution.
Locally we can define the structure of a smooth manifold onthe solution space.
Are there any natural geometric structures on this manifold?
Questions: which geometric structures? what does “natural”mean?
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Geometric structures on solution spaceMotivating examples
Geometric structures on the solution space of differentialequations
Consider a differential equation of finite type (=finite-dimensional space of solutions).
For example, systems of ordinary differential equations.
It reduces (maybe after a series of prolongations) to acompletely integrable distribution with solutions as fibers ofthis distribution.
Locally we can define the structure of a smooth manifold onthe solution space.
Are there any natural geometric structures on this manifold?
Questions: which geometric structures? what does “natural”mean?
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Geometric structures on solution spaceMotivating examples
Geometric structures on the solution space of differentialequations
Consider a differential equation of finite type (=finite-dimensional space of solutions).
For example, systems of ordinary differential equations.
It reduces (maybe after a series of prolongations) to acompletely integrable distribution with solutions as fibers ofthis distribution.
Locally we can define the structure of a smooth manifold onthe solution space.
Are there any natural geometric structures on this manifold?
Questions: which geometric structures? what does “natural”mean?
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Geometric structures on solution spaceMotivating examples
Geometric structures on the solution space of differentialequations
Consider a differential equation of finite type (=finite-dimensional space of solutions).
For example, systems of ordinary differential equations.
It reduces (maybe after a series of prolongations) to acompletely integrable distribution with solutions as fibers ofthis distribution.
Locally we can define the structure of a smooth manifold onthe solution space.
Are there any natural geometric structures on this manifold?
Questions: which geometric structures? what does “natural”mean?
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Geometric structures on solution spaceMotivating examples
Motivating examples
Wunschmann (1905), S.-S. Chern (1939): conformalstructures on 3rd order ODEs with vanishing Wunschmanninvariant.
R. Bryant (1993): affine connections with special holonomy(GL(2)) on the solution space of 4-th order ODEsD. Grossman (2003): Segre structures on the solution spaceof systems of 2nd order ODEsB. Doubrov, M. Dunajski (2008): GL(2)-structures on thesolution space of n-th order ODEs, n ≥ 5M. Godlinski, P. Nurowski (2010): conformal structures onthe solution space of 5th order ODEM. Dunajski, M. Godlinski (2012): G2-structures on thesolution space of 7-th orderS. Casey, M. Dunajski, P. Tod (2012): ASD conformal on thesolution space of a pair of 2nd order ODEs
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Geometric structures on solution spaceMotivating examples
Motivating examples
Wunschmann (1905), S.-S. Chern (1939): conformalstructures on 3rd order ODEs with vanishing Wunschmanninvariant.R. Bryant (1993): affine connections with special holonomy(GL(2)) on the solution space of 4-th order ODEs
D. Grossman (2003): Segre structures on the solution spaceof systems of 2nd order ODEsB. Doubrov, M. Dunajski (2008): GL(2)-structures on thesolution space of n-th order ODEs, n ≥ 5M. Godlinski, P. Nurowski (2010): conformal structures onthe solution space of 5th order ODEM. Dunajski, M. Godlinski (2012): G2-structures on thesolution space of 7-th orderS. Casey, M. Dunajski, P. Tod (2012): ASD conformal on thesolution space of a pair of 2nd order ODEs
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Geometric structures on solution spaceMotivating examples
Motivating examples
Wunschmann (1905), S.-S. Chern (1939): conformalstructures on 3rd order ODEs with vanishing Wunschmanninvariant.R. Bryant (1993): affine connections with special holonomy(GL(2)) on the solution space of 4-th order ODEsD. Grossman (2003): Segre structures on the solution spaceof systems of 2nd order ODEs
B. Doubrov, M. Dunajski (2008): GL(2)-structures on thesolution space of n-th order ODEs, n ≥ 5M. Godlinski, P. Nurowski (2010): conformal structures onthe solution space of 5th order ODEM. Dunajski, M. Godlinski (2012): G2-structures on thesolution space of 7-th orderS. Casey, M. Dunajski, P. Tod (2012): ASD conformal on thesolution space of a pair of 2nd order ODEs
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Geometric structures on solution spaceMotivating examples
Motivating examples
Wunschmann (1905), S.-S. Chern (1939): conformalstructures on 3rd order ODEs with vanishing Wunschmanninvariant.R. Bryant (1993): affine connections with special holonomy(GL(2)) on the solution space of 4-th order ODEsD. Grossman (2003): Segre structures on the solution spaceof systems of 2nd order ODEsB. Doubrov, M. Dunajski (2008): GL(2)-structures on thesolution space of n-th order ODEs, n ≥ 5
M. Godlinski, P. Nurowski (2010): conformal structures onthe solution space of 5th order ODEM. Dunajski, M. Godlinski (2012): G2-structures on thesolution space of 7-th orderS. Casey, M. Dunajski, P. Tod (2012): ASD conformal on thesolution space of a pair of 2nd order ODEs
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Geometric structures on solution spaceMotivating examples
Motivating examples
Wunschmann (1905), S.-S. Chern (1939): conformalstructures on 3rd order ODEs with vanishing Wunschmanninvariant.R. Bryant (1993): affine connections with special holonomy(GL(2)) on the solution space of 4-th order ODEsD. Grossman (2003): Segre structures on the solution spaceof systems of 2nd order ODEsB. Doubrov, M. Dunajski (2008): GL(2)-structures on thesolution space of n-th order ODEs, n ≥ 5M. Godlinski, P. Nurowski (2010): conformal structures onthe solution space of 5th order ODE
M. Dunajski, M. Godlinski (2012): G2-structures on thesolution space of 7-th orderS. Casey, M. Dunajski, P. Tod (2012): ASD conformal on thesolution space of a pair of 2nd order ODEs
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Geometric structures on solution spaceMotivating examples
Motivating examples
Wunschmann (1905), S.-S. Chern (1939): conformalstructures on 3rd order ODEs with vanishing Wunschmanninvariant.R. Bryant (1993): affine connections with special holonomy(GL(2)) on the solution space of 4-th order ODEsD. Grossman (2003): Segre structures on the solution spaceof systems of 2nd order ODEsB. Doubrov, M. Dunajski (2008): GL(2)-structures on thesolution space of n-th order ODEs, n ≥ 5M. Godlinski, P. Nurowski (2010): conformal structures onthe solution space of 5th order ODEM. Dunajski, M. Godlinski (2012): G2-structures on thesolution space of 7-th order
S. Casey, M. Dunajski, P. Tod (2012): ASD conformal on thesolution space of a pair of 2nd order ODEs
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Geometric structures on solution spaceMotivating examples
Motivating examples
Wunschmann (1905), S.-S. Chern (1939): conformalstructures on 3rd order ODEs with vanishing Wunschmanninvariant.R. Bryant (1993): affine connections with special holonomy(GL(2)) on the solution space of 4-th order ODEsD. Grossman (2003): Segre structures on the solution spaceof systems of 2nd order ODEsB. Doubrov, M. Dunajski (2008): GL(2)-structures on thesolution space of n-th order ODEs, n ≥ 5M. Godlinski, P. Nurowski (2010): conformal structures onthe solution space of 5th order ODEM. Dunajski, M. Godlinski (2012): G2-structures on thesolution space of 7-th orderS. Casey, M. Dunajski, P. Tod (2012): ASD conformal on thesolution space of a pair of 2nd order ODEsBoris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Admissible curves in flag varieties
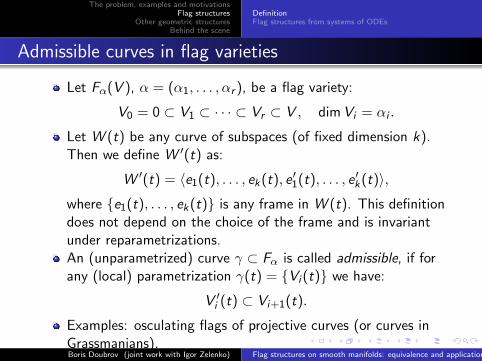
Let Fα(V ), α = (α1, . . . , αr ), be a flag variety:
V0 = 0 ⊂ V1 ⊂ · · · ⊂ Vr ⊂ V , dim Vi = αi .
Let W (t) be any curve of subspaces (of fixed dimension k).Then we define W ′(t) as:
W ′(t) = 〈e1(t), . . . , ek(t), e ′1(t), . . . , e ′k(t)〉,where {e1(t), . . . , ek(t)} is any frame in W (t). This definitiondoes not depend on the choice of the frame and is invariantunder reparametrizations.An (unparametrized) curve γ ⊂ Fα is called admissible, if forany (local) parametrization γ(t) = {Vi (t)} we have:
V ′i (t) ⊂ Vi+1(t).
Examples: osculating flags of projective curves (or curves inGrassmanians).
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Admissible curves in flag varieties
Let Fα(V ), α = (α1, . . . , αr ), be a flag variety:
V0 = 0 ⊂ V1 ⊂ · · · ⊂ Vr ⊂ V , dim Vi = αi .
Let W (t) be any curve of subspaces (of fixed dimension k).Then we define W ′(t) as:
W ′(t) = 〈e1(t), . . . , ek(t), e ′1(t), . . . , e ′k(t)〉,where {e1(t), . . . , ek(t)} is any frame in W (t). This definitiondoes not depend on the choice of the frame and is invariantunder reparametrizations.
An (unparametrized) curve γ ⊂ Fα is called admissible, if forany (local) parametrization γ(t) = {Vi (t)} we have:
V ′i (t) ⊂ Vi+1(t).
Examples: osculating flags of projective curves (or curves inGrassmanians).
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Admissible curves in flag varieties
Let Fα(V ), α = (α1, . . . , αr ), be a flag variety:
V0 = 0 ⊂ V1 ⊂ · · · ⊂ Vr ⊂ V , dim Vi = αi .
Let W (t) be any curve of subspaces (of fixed dimension k).Then we define W ′(t) as:
W ′(t) = 〈e1(t), . . . , ek(t), e ′1(t), . . . , e ′k(t)〉,where {e1(t), . . . , ek(t)} is any frame in W (t). This definitiondoes not depend on the choice of the frame and is invariantunder reparametrizations.An (unparametrized) curve γ ⊂ Fα is called admissible, if forany (local) parametrization γ(t) = {Vi (t)} we have:
V ′i (t) ⊂ Vi+1(t).
Examples: osculating flags of projective curves (or curves inGrassmanians).
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Admissible curves in flag varieties
Let Fα(V ), α = (α1, . . . , αr ), be a flag variety:
V0 = 0 ⊂ V1 ⊂ · · · ⊂ Vr ⊂ V , dim Vi = αi .
Let W (t) be any curve of subspaces (of fixed dimension k).Then we define W ′(t) as:
W ′(t) = 〈e1(t), . . . , ek(t), e ′1(t), . . . , e ′k(t)〉,where {e1(t), . . . , ek(t)} is any frame in W (t). This definitiondoes not depend on the choice of the frame and is invariantunder reparametrizations.An (unparametrized) curve γ ⊂ Fα is called admissible, if forany (local) parametrization γ(t) = {Vi (t)} we have:
V ′i (t) ⊂ Vi+1(t).
Examples: osculating flags of projective curves (or curves inGrassmanians).Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Flag structures
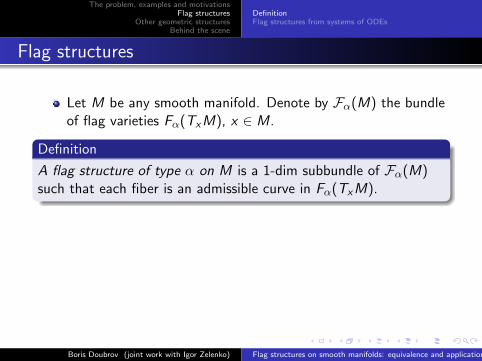
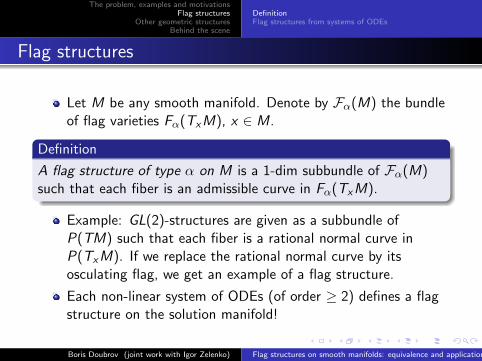
Let M be any smooth manifold. Denote by Fα(M) the bundleof flag varieties Fα(TxM), x ∈ M.
Definition
A flag structure of type α on M is a 1-dim subbundle of Fα(M)such that each fiber is an admissible curve in Fα(TxM).
Example: GL(2)-structures are given as a subbundle ofP(TM) such that each fiber is a rational normal curve inP(TxM). If we replace the rational normal curve by itsosculating flag, we get an example of a flag structure.
Each non-linear system of ODEs (of order ≥ 2) defines a flagstructure on the solution manifold!
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Flag structures
Let M be any smooth manifold. Denote by Fα(M) the bundleof flag varieties Fα(TxM), x ∈ M.
Definition
A flag structure of type α on M is a 1-dim subbundle of Fα(M)such that each fiber is an admissible curve in Fα(TxM).
Example: GL(2)-structures are given as a subbundle ofP(TM) such that each fiber is a rational normal curve inP(TxM). If we replace the rational normal curve by itsosculating flag, we get an example of a flag structure.
Each non-linear system of ODEs (of order ≥ 2) defines a flagstructure on the solution manifold!
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Flag structures
Let M be any smooth manifold. Denote by Fα(M) the bundleof flag varieties Fα(TxM), x ∈ M.
Definition
A flag structure of type α on M is a 1-dim subbundle of Fα(M)such that each fiber is an admissible curve in Fα(TxM).
Example: GL(2)-structures are given as a subbundle ofP(TM) such that each fiber is a rational normal curve inP(TxM). If we replace the rational normal curve by itsosculating flag, we get an example of a flag structure.
Each non-linear system of ODEs (of order ≥ 2) defines a flagstructure on the solution manifold!
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Flag structures
Let M be any smooth manifold. Denote by Fα(M) the bundleof flag varieties Fα(TxM), x ∈ M.
Definition
A flag structure of type α on M is a 1-dim subbundle of Fα(M)such that each fiber is an admissible curve in Fα(TxM).
Example: GL(2)-structures are given as a subbundle ofP(TM) such that each fiber is a rational normal curve inP(TxM). If we replace the rational normal curve by itsosculating flag, we get an example of a flag structure.
Each non-linear system of ODEs (of order ≥ 2) defines a flagstructure on the solution manifold!
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Flag structures via jet spaces
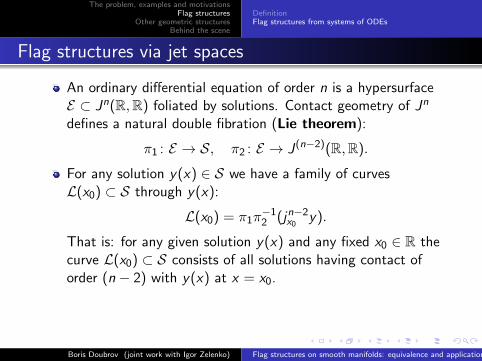
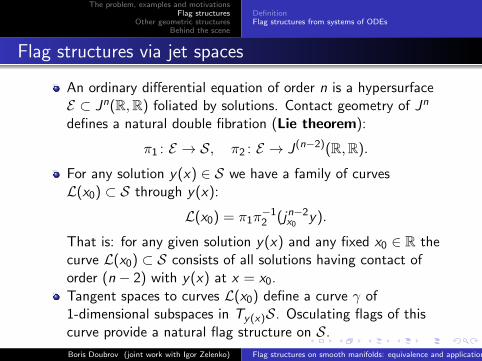
An ordinary differential equation of order n is a hypersurfaceE ⊂ Jn(R,R) foliated by solutions. Contact geometry of Jn
defines a natural double fibration (Lie theorem):
π1 : E → S, π2 : E → J(n−2)(R,R).
For any solution y(x) ∈ S we have a family of curvesL(x0) ⊂ S through y(x):
L(x0) = π1π−12 (jn−2
x0y).
That is: for any given solution y(x) and any fixed x0 ∈ R thecurve L(x0) ⊂ S consists of all solutions having contact oforder (n − 2) with y(x) at x = x0.Tangent spaces to curves L(x0) define a curve γ of1-dimensional subspaces in Ty(x)S. Osculating flags of thiscurve provide a natural flag structure on S.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Flag structures via jet spaces
An ordinary differential equation of order n is a hypersurfaceE ⊂ Jn(R,R) foliated by solutions. Contact geometry of Jn
defines a natural double fibration (Lie theorem):
π1 : E → S, π2 : E → J(n−2)(R,R).
For any solution y(x) ∈ S we have a family of curvesL(x0) ⊂ S through y(x):
L(x0) = π1π−12 (jn−2
x0y).
That is: for any given solution y(x) and any fixed x0 ∈ R thecurve L(x0) ⊂ S consists of all solutions having contact oforder (n − 2) with y(x) at x = x0.
Tangent spaces to curves L(x0) define a curve γ of1-dimensional subspaces in Ty(x)S. Osculating flags of thiscurve provide a natural flag structure on S.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Flag structures via jet spaces
An ordinary differential equation of order n is a hypersurfaceE ⊂ Jn(R,R) foliated by solutions. Contact geometry of Jn
defines a natural double fibration (Lie theorem):
π1 : E → S, π2 : E → J(n−2)(R,R).
For any solution y(x) ∈ S we have a family of curvesL(x0) ⊂ S through y(x):
L(x0) = π1π−12 (jn−2
x0y).
That is: for any given solution y(x) and any fixed x0 ∈ R thecurve L(x0) ⊂ S consists of all solutions having contact oforder (n − 2) with y(x) at x = x0.Tangent spaces to curves L(x0) define a curve γ of1-dimensional subspaces in Ty(x)S. Osculating flags of thiscurve provide a natural flag structure on S.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Flag structures via linearization
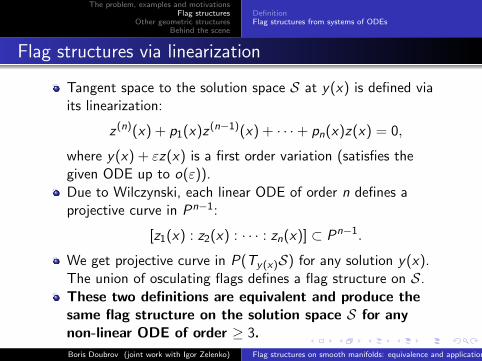
Tangent space to the solution space S at y(x) is defined viaits linearization:
z(n)(x) + p1(x)z(n−1)(x) + · · ·+ pn(x)z(x) = 0,
where y(x) + εz(x) is a first order variation (satisfies thegiven ODE up to o(ε)).
Due to Wilczynski, each linear ODE of order n defines aprojective curve in Pn−1:
[z1(x) : z2(x) : · · · : zn(x)] ⊂ Pn−1.
We get projective curve in P(Ty(x)S) for any solution y(x).The union of osculating flags defines a flag structure on S.These two definitions are equivalent and produce thesame flag structure on the solution space S for anynon-linear ODE of order ≥ 3.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Flag structures via linearization
Tangent space to the solution space S at y(x) is defined viaits linearization:
z(n)(x) + p1(x)z(n−1)(x) + · · ·+ pn(x)z(x) = 0,
where y(x) + εz(x) is a first order variation (satisfies thegiven ODE up to o(ε)).Due to Wilczynski, each linear ODE of order n defines aprojective curve in Pn−1:
[z1(x) : z2(x) : · · · : zn(x)] ⊂ Pn−1.
We get projective curve in P(Ty(x)S) for any solution y(x).The union of osculating flags defines a flag structure on S.These two definitions are equivalent and produce thesame flag structure on the solution space S for anynon-linear ODE of order ≥ 3.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Flag structures via linearization
Tangent space to the solution space S at y(x) is defined viaits linearization:
z(n)(x) + p1(x)z(n−1)(x) + · · ·+ pn(x)z(x) = 0,
where y(x) + εz(x) is a first order variation (satisfies thegiven ODE up to o(ε)).Due to Wilczynski, each linear ODE of order n defines aprojective curve in Pn−1:
[z1(x) : z2(x) : · · · : zn(x)] ⊂ Pn−1.
We get projective curve in P(Ty(x)S) for any solution y(x).The union of osculating flags defines a flag structure on S.
These two definitions are equivalent and produce thesame flag structure on the solution space S for anynon-linear ODE of order ≥ 3.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
DefinitionFlag structures from systems of ODEs
Flag structures via linearization
Tangent space to the solution space S at y(x) is defined viaits linearization:
z(n)(x) + p1(x)z(n−1)(x) + · · ·+ pn(x)z(x) = 0,
where y(x) + εz(x) is a first order variation (satisfies thegiven ODE up to o(ε)).Due to Wilczynski, each linear ODE of order n defines aprojective curve in Pn−1:
[z1(x) : z2(x) : · · · : zn(x)] ⊂ Pn−1.
We get projective curve in P(Ty(x)S) for any solution y(x).The union of osculating flags defines a flag structure on S.These two definitions are equivalent and produce thesame flag structure on the solution space S for anynon-linear ODE of order ≥ 3.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Conformal and symplectic structuresOther G -structures
Projective invariants of curves
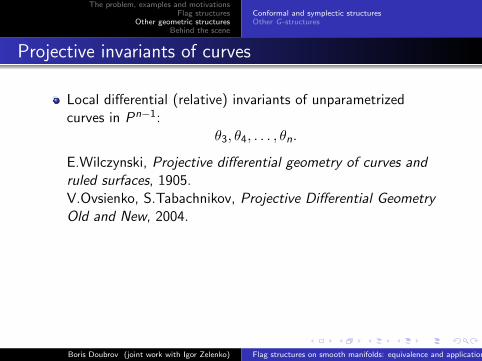
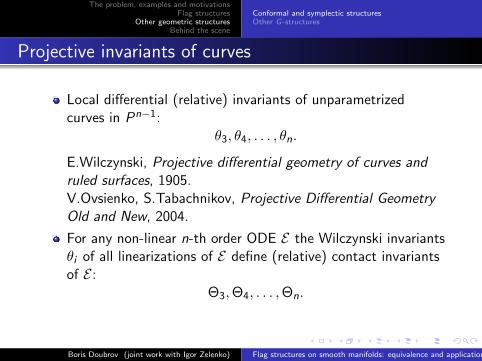
Local differential (relative) invariants of unparametrizedcurves in Pn−1:
θ3, θ4, . . . , θn.
E.Wilczynski, Projective differential geometry of curves andruled surfaces, 1905.V.Ovsienko, S.Tabachnikov, Projective Differential GeometryOld and New, 2004.
For any non-linear n-th order ODE E the Wilczynski invariantsθi of all linearizations of E define (relative) contact invariantsof E :
Θ3,Θ4, . . . ,Θn.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Conformal and symplectic structuresOther G -structures
Projective invariants of curves
Local differential (relative) invariants of unparametrizedcurves in Pn−1:
θ3, θ4, . . . , θn.
E.Wilczynski, Projective differential geometry of curves andruled surfaces, 1905.V.Ovsienko, S.Tabachnikov, Projective Differential GeometryOld and New, 2004.
For any non-linear n-th order ODE E the Wilczynski invariantsθi of all linearizations of E define (relative) contact invariantsof E :
Θ3,Θ4, . . . ,Θn.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Conformal and symplectic structuresOther G -structures
Projective invariants of curves
Wilczynski invariant θ3 for y ′′′ + p2y ′′ + p1y ′ + p0y = 0:
θ3 = 16 p′′2 + 1
3 p2p′2 + 227 p3
2 − 12 p′1 − 1
3 p1p2 + p0.
Wilczynski invariant θ3 for a curve [y1 : y2 : y3] ⊂ P2 is theabove θ3 for the linear equation with the solution space〈y1, y2, y3〉. For a curve [1 : x : y(x)] we get:
θ3 = 9y ′′2y (5) − 45y ′′y (3)y (4) + 40(y (3)
)3.
Generalized Wilczynski invariant for y ′′′ = F (x , y , y ′, y ′′)coincides with Wunschmann invariant:
Θ3 = −1
6F2xx +
1
3F2F2x −
2
27F 3
2 +1
2F1x −
1
3F1F2 − F0.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Conformal and symplectic structuresOther G -structures
Projective invariants of curves
Wilczynski invariant θ3 for y ′′′ + p2y ′′ + p1y ′ + p0y = 0:
θ3 = 16 p′′2 + 1
3 p2p′2 + 227 p3
2 − 12 p′1 − 1
3 p1p2 + p0.
Wilczynski invariant θ3 for a curve [y1 : y2 : y3] ⊂ P2 is theabove θ3 for the linear equation with the solution space〈y1, y2, y3〉. For a curve [1 : x : y(x)] we get:
θ3 = 9y ′′2y (5) − 45y ′′y (3)y (4) + 40(y (3)
)3.
Generalized Wilczynski invariant for y ′′′ = F (x , y , y ′, y ′′)coincides with Wunschmann invariant:
Θ3 = −1
6F2xx +
1
3F2F2x −
2
27F 3
2 +1
2F1x −
1
3F1F2 − F0.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Conformal and symplectic structuresOther G -structures
Projective invariants of curves
Wilczynski invariant θ3 for y ′′′ + p2y ′′ + p1y ′ + p0y = 0:
θ3 = 16 p′′2 + 1
3 p2p′2 + 227 p3
2 − 12 p′1 − 1
3 p1p2 + p0.
Wilczynski invariant θ3 for a curve [y1 : y2 : y3] ⊂ P2 is theabove θ3 for the linear equation with the solution space〈y1, y2, y3〉. For a curve [1 : x : y(x)] we get:
θ3 = 9y ′′2y (5) − 45y ′′y (3)y (4) + 40(y (3)
)3.
Generalized Wilczynski invariant for y ′′′ = F (x , y , y ′, y ′′)coincides with Wunschmann invariant:
Θ3 = −1
6F2xx +
1
3F2F2x −
2
27F 3
2 +1
2F1x −
1
3F1F2 − F0.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Conformal and symplectic structuresOther G -structures
Conformal and symplectic structures
We say that a curve γ(t) = {Vi (t)} in the flag variety Fα(V )is compatible with a non-degenerate bilinear form B, ifB(Vi (t),Vr+1−i (t)) = 0 for all i = 1, . . . , r − 1.
An osculating flag of a projective curve γ ⊂ P(V ) iscompatible with a non-degenerate bilinear form if and only ifθ2i+1 = 0 for all i . In this case the form is unique up to ascalar and is symmetric (dim V is odd) or skew-symmetric(dim V is even).
Theorem
The space of solutions of a single non-linear ODE of order n ≥ 3admits a natural conformal (n is odd) or conformal symplectic (n iseven) structure if and only if Θ2i+1 = 0 for all i .
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Conformal and symplectic structuresOther G -structures
Conformal and symplectic structures
We say that a curve γ(t) = {Vi (t)} in the flag variety Fα(V )is compatible with a non-degenerate bilinear form B, ifB(Vi (t),Vr+1−i (t)) = 0 for all i = 1, . . . , r − 1.
An osculating flag of a projective curve γ ⊂ P(V ) iscompatible with a non-degenerate bilinear form if and only ifθ2i+1 = 0 for all i . In this case the form is unique up to ascalar and is symmetric (dim V is odd) or skew-symmetric(dim V is even).
Theorem
The space of solutions of a single non-linear ODE of order n ≥ 3admits a natural conformal (n is odd) or conformal symplectic (n iseven) structure if and only if Θ2i+1 = 0 for all i .
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Conformal and symplectic structuresOther G -structures
Conformal and symplectic structures
We say that a curve γ(t) = {Vi (t)} in the flag variety Fα(V )is compatible with a non-degenerate bilinear form B, ifB(Vi (t),Vr+1−i (t)) = 0 for all i = 1, . . . , r − 1.
An osculating flag of a projective curve γ ⊂ P(V ) iscompatible with a non-degenerate bilinear form if and only ifθ2i+1 = 0 for all i . In this case the form is unique up to ascalar and is symmetric (dim V is odd) or skew-symmetric(dim V is even).
Theorem
The space of solutions of a single non-linear ODE of order n ≥ 3admits a natural conformal (n is odd) or conformal symplectic (n iseven) structure if and only if Θ2i+1 = 0 for all i .
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Conformal and symplectic structuresOther G -structures
Other G -structures
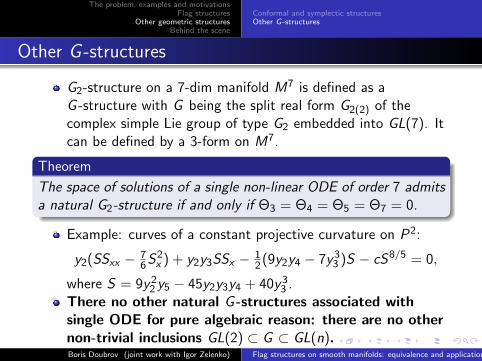
G2-structure on a 7-dim manifold M7 is defined as aG -structure with G being the split real form G2(2) of thecomplex simple Lie group of type G2 embedded into GL(7). Itcan be defined by a 3-form on M7.
Theorem
The space of solutions of a single non-linear ODE of order 7 admitsa natural G2-structure if and only if Θ3 = Θ4 = Θ5 = Θ7 = 0.
Example: curves of a constant projective curvature on P2:
y2(SSxx − 76 S2
x ) + y2y3SSx − 12 (9y2y4 − 7y 3
3 )S − cS8/5 = 0,
where S = 9y 22 y5 − 45y2y3y4 + 40y 3
3 .There no other natural G -structures associated withsingle ODE for pure algebraic reason: there are no othernon-trivial inclusions GL(2) ⊂ G ⊂ GL(n).
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Conformal and symplectic structuresOther G -structures
Other G -structures
G2-structure on a 7-dim manifold M7 is defined as aG -structure with G being the split real form G2(2) of thecomplex simple Lie group of type G2 embedded into GL(7). Itcan be defined by a 3-form on M7.
Theorem
The space of solutions of a single non-linear ODE of order 7 admitsa natural G2-structure if and only if Θ3 = Θ4 = Θ5 = Θ7 = 0.
Example: curves of a constant projective curvature on P2:
y2(SSxx − 76 S2
x ) + y2y3SSx − 12 (9y2y4 − 7y 3
3 )S − cS8/5 = 0,
where S = 9y 22 y5 − 45y2y3y4 + 40y 3
3 .There no other natural G -structures associated withsingle ODE for pure algebraic reason: there are no othernon-trivial inclusions GL(2) ⊂ G ⊂ GL(n).
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Conformal and symplectic structuresOther G -structures
Other G -structures
G2-structure on a 7-dim manifold M7 is defined as aG -structure with G being the split real form G2(2) of thecomplex simple Lie group of type G2 embedded into GL(7). Itcan be defined by a 3-form on M7.
Theorem
The space of solutions of a single non-linear ODE of order 7 admitsa natural G2-structure if and only if Θ3 = Θ4 = Θ5 = Θ7 = 0.
Example: curves of a constant projective curvature on P2:
y2(SSxx − 76 S2
x ) + y2y3SSx − 12 (9y2y4 − 7y 3
3 )S − cS8/5 = 0,
where S = 9y 22 y5 − 45y2y3y4 + 40y 3
3 .
There no other natural G -structures associated withsingle ODE for pure algebraic reason: there are no othernon-trivial inclusions GL(2) ⊂ G ⊂ GL(n).
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Conformal and symplectic structuresOther G -structures
Other G -structures
G2-structure on a 7-dim manifold M7 is defined as aG -structure with G being the split real form G2(2) of thecomplex simple Lie group of type G2 embedded into GL(7). Itcan be defined by a 3-form on M7.
Theorem
The space of solutions of a single non-linear ODE of order 7 admitsa natural G2-structure if and only if Θ3 = Θ4 = Θ5 = Θ7 = 0.
Example: curves of a constant projective curvature on P2:
y2(SSxx − 76 S2
x ) + y2y3SSx − 12 (9y2y4 − 7y 3
3 )S − cS8/5 = 0,
where S = 9y 22 y5 − 45y2y3y4 + 40y 3
3 .There no other natural G -structures associated withsingle ODE for pure algebraic reason: there are no othernon-trivial inclusions GL(2) ⊂ G ⊂ GL(n).Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Behind the scene
Behind the scene
Symbols of flag structures (combinatorics of Young tableaux),the existence of a natural frame, local equivalence andinvariants.
Generalization to other flag types and systems of ODEs ofmixed order.Not all flag structures come from systems of ODEs (of mixedorder). Those which come from ODEs satisfy extrasemi-integrability conditions expressed in terms of localdifferential invariants. Other examples are known.Flag structures on contact manifolds (isotropic flags inside thecontact distribution) and applications to the geometry ofgeneric vector distributions.Relationship between flag structures and Tanaka theory.Special properties of geometric structures that come fromODEs.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Behind the scene
Behind the scene
Symbols of flag structures (combinatorics of Young tableaux),the existence of a natural frame, local equivalence andinvariants.Generalization to other flag types and systems of ODEs ofmixed order.
Not all flag structures come from systems of ODEs (of mixedorder). Those which come from ODEs satisfy extrasemi-integrability conditions expressed in terms of localdifferential invariants. Other examples are known.Flag structures on contact manifolds (isotropic flags inside thecontact distribution) and applications to the geometry ofgeneric vector distributions.Relationship between flag structures and Tanaka theory.Special properties of geometric structures that come fromODEs.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Behind the scene
Behind the scene
Symbols of flag structures (combinatorics of Young tableaux),the existence of a natural frame, local equivalence andinvariants.Generalization to other flag types and systems of ODEs ofmixed order.Not all flag structures come from systems of ODEs (of mixedorder). Those which come from ODEs satisfy extrasemi-integrability conditions expressed in terms of localdifferential invariants. Other examples are known.
Flag structures on contact manifolds (isotropic flags inside thecontact distribution) and applications to the geometry ofgeneric vector distributions.Relationship between flag structures and Tanaka theory.Special properties of geometric structures that come fromODEs.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Behind the scene
Behind the scene
Symbols of flag structures (combinatorics of Young tableaux),the existence of a natural frame, local equivalence andinvariants.Generalization to other flag types and systems of ODEs ofmixed order.Not all flag structures come from systems of ODEs (of mixedorder). Those which come from ODEs satisfy extrasemi-integrability conditions expressed in terms of localdifferential invariants. Other examples are known.Flag structures on contact manifolds (isotropic flags inside thecontact distribution) and applications to the geometry ofgeneric vector distributions.
Relationship between flag structures and Tanaka theory.Special properties of geometric structures that come fromODEs.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Behind the scene
Behind the scene
Symbols of flag structures (combinatorics of Young tableaux),the existence of a natural frame, local equivalence andinvariants.Generalization to other flag types and systems of ODEs ofmixed order.Not all flag structures come from systems of ODEs (of mixedorder). Those which come from ODEs satisfy extrasemi-integrability conditions expressed in terms of localdifferential invariants. Other examples are known.Flag structures on contact manifolds (isotropic flags inside thecontact distribution) and applications to the geometry ofgeneric vector distributions.Relationship between flag structures and Tanaka theory.
Special properties of geometric structures that come fromODEs.
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Behind the scene
Behind the scene
Symbols of flag structures (combinatorics of Young tableaux),the existence of a natural frame, local equivalence andinvariants.Generalization to other flag types and systems of ODEs ofmixed order.Not all flag structures come from systems of ODEs (of mixedorder). Those which come from ODEs satisfy extrasemi-integrability conditions expressed in terms of localdifferential invariants. Other examples are known.Flag structures on contact manifolds (isotropic flags inside thecontact distribution) and applications to the geometry ofgeneric vector distributions.Relationship between flag structures and Tanaka theory.Special properties of geometric structures that come fromODEs.Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Behind the scene
Generalization to other flag types
The same construction works for systems of ODEs: we getflag structures of type α = (m, 2m, . . . , (n − 1)m), where m isa number of equations, n the order of the system of ODEs.
We get other types of flag varieties starting from systems ofODEs of mixed order such as:
y ′′(x) = F (x , y , z , y ′, z ′, z ′′), z ′′′ = G (x , y , z , y ′, z ′, z ′′).
Caution: we get different types of flags if we consider differentdifferential systems associated with the above equation!Point transformations preserve J2,3 → J0,0 and lead to flagstructure of type (1, 3, 5). Contact transformations preserveJ2,3 → J1,2 and lead to flag structures of type (2, 4, 5).In the trivial case y ′′ = z ′′′ = 0 symmetry algebras of thesetwo kinds of differential systems have the same dimension 15,but are not isomorphic!
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Behind the scene
Generalization to other flag types
The same construction works for systems of ODEs: we getflag structures of type α = (m, 2m, . . . , (n − 1)m), where m isa number of equations, n the order of the system of ODEs.We get other types of flag varieties starting from systems ofODEs of mixed order such as:
y ′′(x) = F (x , y , z , y ′, z ′, z ′′), z ′′′ = G (x , y , z , y ′, z ′, z ′′).
Caution: we get different types of flags if we consider differentdifferential systems associated with the above equation!Point transformations preserve J2,3 → J0,0 and lead to flagstructure of type (1, 3, 5). Contact transformations preserveJ2,3 → J1,2 and lead to flag structures of type (2, 4, 5).In the trivial case y ′′ = z ′′′ = 0 symmetry algebras of thesetwo kinds of differential systems have the same dimension 15,but are not isomorphic!
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Behind the scene
Generalization to other flag types
The same construction works for systems of ODEs: we getflag structures of type α = (m, 2m, . . . , (n − 1)m), where m isa number of equations, n the order of the system of ODEs.We get other types of flag varieties starting from systems ofODEs of mixed order such as:
y ′′(x) = F (x , y , z , y ′, z ′, z ′′), z ′′′ = G (x , y , z , y ′, z ′, z ′′).
Caution: we get different types of flags if we consider differentdifferential systems associated with the above equation!
Point transformations preserve J2,3 → J0,0 and lead to flagstructure of type (1, 3, 5). Contact transformations preserveJ2,3 → J1,2 and lead to flag structures of type (2, 4, 5).In the trivial case y ′′ = z ′′′ = 0 symmetry algebras of thesetwo kinds of differential systems have the same dimension 15,but are not isomorphic!
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications

The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Behind the scene
Generalization to other flag types
The same construction works for systems of ODEs: we getflag structures of type α = (m, 2m, . . . , (n − 1)m), where m isa number of equations, n the order of the system of ODEs.We get other types of flag varieties starting from systems ofODEs of mixed order such as:
y ′′(x) = F (x , y , z , y ′, z ′, z ′′), z ′′′ = G (x , y , z , y ′, z ′, z ′′).
Caution: we get different types of flags if we consider differentdifferential systems associated with the above equation!Point transformations preserve J2,3 → J0,0 and lead to flagstructure of type (1, 3, 5). Contact transformations preserveJ2,3 → J1,2 and lead to flag structures of type (2, 4, 5).
In the trivial case y ′′ = z ′′′ = 0 symmetry algebras of thesetwo kinds of differential systems have the same dimension 15,but are not isomorphic!
Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications
The problem, examples and motivationsFlag structures
Other geometric structuresBehind the scene
Behind the scene
Generalization to other flag types
The same construction works for systems of ODEs: we getflag structures of type α = (m, 2m, . . . , (n − 1)m), where m isa number of equations, n the order of the system of ODEs.We get other types of flag varieties starting from systems ofODEs of mixed order such as:
y ′′(x) = F (x , y , z , y ′, z ′, z ′′), z ′′′ = G (x , y , z , y ′, z ′, z ′′).
Caution: we get different types of flags if we consider differentdifferential systems associated with the above equation!Point transformations preserve J2,3 → J0,0 and lead to flagstructure of type (1, 3, 5). Contact transformations preserveJ2,3 → J1,2 and lead to flag structures of type (2, 4, 5).In the trivial case y ′′ = z ′′′ = 0 symmetry algebras of thesetwo kinds of differential systems have the same dimension 15,but are not isomorphic!Boris Doubrov (joint work with Igor Zelenko) Flag structures on smooth manifolds: equivalence and applications






![arXiv:1707.06328v3 [math-ph] 19 Dec 2019 · field) and a connection in an SO(3,1) bundle1. The equivalence between EH and PCH theories is well established for closed manifolds, and](https://static.fdocuments.in/doc/165x107/5e4f35a08e5f4307c55a50cd/arxiv170706328v3-math-ph-19-dec-2019-ield-and-a-connection-in-an-so31.jpg)
![KÄHLER STRUCTURES ON GENERALIZED FLAG MANIFOLDS … · For this result we follow [4] by Bordemann, Forger and R omer. For a more detailed discussion regarding complex structures](https://static.fdocuments.in/doc/165x107/5b8e824209d3f231458daf50/kaehler-structures-on-generalized-flag-manifolds-for-this-result-we-follow-4.jpg)